PLC增加CANopen通讯能力的方法
汇川PLC在CAN通讯的介绍
H1U/H2U系列PLC在CAN通信的介绍编辑: iris 创建时间: 2011年02月24日概述H1U/H2U系列PLC,在PLC主模块上加上CAN通讯卡后具有CAN通讯功能。
可支持自由CAN 通信指令。
可支持远程模块访问指令FROM/TO,同时支持CAN-LINK网络功能。
CAN-LINK是汇川控制技术公司开发的基于CAN总线的网络协议,该协议是一个开放的协议,支持该协议的设备均可接入CAN-LINK网络。
H1U/H2U系列PLC及其远程扩展模块均可以支持CAN-LINK协议,CAN-LINK组网设备数量最大可达64台。
关键词:CAN-LINK,H2U远程扩展1.CAN-LINK网络CAN-LINK应用网络示意图:1.1 硬件接口H1U/H2UCAN扩展卡接口定义:CAN-LINK接口引脚定义:组成CAN-LINK网络时,所有设备的以上五根线均要一一对应连载一起,并且+24Vcc和0V需要外接24V直流电源。
总线的两端均要加120欧姆的CAN总线匹配电阻。
CAN-LINK接线图如下图所示:H1U/H2U远程扩展卡和CAN接口卡均内置了匹配电阻,可通过拨码开关接入或断开。
若改变拨码开关,除匹配电阻外,波特率和地址并不能立即生效,需要给系统重新上电才能使用新的设置参数。
1.2 CAN-LINK软件设置系统通过一下步骤完成CAN-LINK的配置一、通过AUTOSHOP完成CAN-LINK网络组态,定义需要叫唤的数据。
二、把配置信息下载到H1U或H2U系列的PLC中三、所有PLC等可编程设备均要启动CAN-LINK网络功能,若非特殊说明,H1U/H2系列扩展模块默认是启用CAN-LINK功能的,不需要特殊的设置。
并且,在有CAN-LINK配置的PLC中,需要通过用户程序启动CAN-LINK配置。
1.3 CAN-LINK网站组态CAN-LINK网络组态有两种方式,绘图时、填表式或指令编写。
绘图式比较直观,填表式则比较简单,指令编写即需要用户程序启动CANTX编写满足CAN-LINK配置帧的用户程序,以下简单介绍一下绘图式,更详细的操作请参见AUTOSHOP软件使用说明。
台达PLC通讯控制伺服教程
以下
修改监控时间,延长通讯时间
-
原点回归伺服软件设置:(原点复归模式设置) 1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
-
原点回归伺服软件设置:(路径10设置) 1;点击原点复归模式 2;选择到路径10(路径10设置为回零点进行设置) 3;选TYPE路径型式 4;选位置命令 5;选运行速度 6;p621待机位给定目标位置
-
台达PLC以Canopen控制伺服
在线描硬件,
ቤተ መጻሕፍቲ ባይዱSDO自动配置
-
SDO配置内容
-
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
-
决对定位伺服软件设置: (决对定位路径1设置) 1;选择到路径10 2;选TYPE路径型式 3;选位置命令终点 4;选运行速度(选择PLC-PDO配置运行速度P5-75) 5;显示外部给定目标位置
-
-
-
定位控制时P6-03为位置来源
-
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
CANopen模块

针对SIMATIC S7-1200 PLC的CANopen主站/从站模块CM CANopen能够令您联接任意CANopen或CAN 2.0A设备到您的SIMATIC S7-1200 PLC。
该模块插入您的S7-1200并作为CANopen/CAN设备与微型PLC之间的桥梁。
这就允许您在设计系统时可从一系列自动化产品中做选择。
支持CANopen与CAN 2.0A简单添加CM CANopen扩展模块到SIMATIC S7-1200 PLC,任意运行CANopen协议或任意自定义的基于CAN 2.0A协议的设备都可联接。
一旦添加到S7-1200,您就可以从TIA Portal建立CM CANopen模块。
您的CANopen网络配置就可在附带的Configuration Studio软件中完成。
CM CANopen模块从TIA Portal既可配置成主站也可配置成从站。
无需编程来生成配置。
CM CANopen模块从2013年6月起有货- 联系HMS获得更多信息!概览TIA Portal配置CANopen配置CANopen/CAN特点技术快速启动CM CANopen模块为直接插入SIMATIC S7-1200 PLC上而设计。
该模块通过基架总线交换数据与信号,基架总线同时为模块供电。
简易四步令您启动并快速运行!1. 添加CM CANopen模块到S7-1200 PLC2. 从TIA Portal下载并安装HSP配置文件CM CANopen特点针对SIMATIC S7-1200 PLC的即插式CANopen主站/从站模块主站模式下联接多达16个CANopen从站节点每个模块256字节输入与256字节输出每个CPU可连接多达3个模块LEDs提供模块、网络与I/O状态的诊断信息支持PLC(PLC1214系列及以上)中CANopen网络配置的存储集成在TIA Portal配置包中的硬件目录中支持针对自定义协议实施的透明CAN2.0A通过附带的CANopen Configuration Studio软件进行CANopen配置预制功能模块可用于TIA Portal中的简单PLC编程符合CANopen通信规范CiA 301 rev.4.2与CiA 302 rev.4.1。
PLC高级应用技术,PLC与变频器的CANopen总线通讯控制之线路介绍
PLC高级应用技术,PLC与变频器的CANopen总线通讯控制之线路介绍上篇文章PLC(可编程控制器)和变频器怎样连接?向大家讲解了PLC控制变频器的三种方式,对于硬接线的方式,初学者很好理解,对于总线通讯,可能理解起来就比较麻烦,今天就跟大家讲解一下PLC和变频器的总线通讯。
就以CANopen总线为例。
CANopen总线是一种常用的现场总线,在嵌入式系统中非常常见,施耐德电气,伦茨伺服,翠欧运动控制器等等默认支持的总线就是CANopen总线。
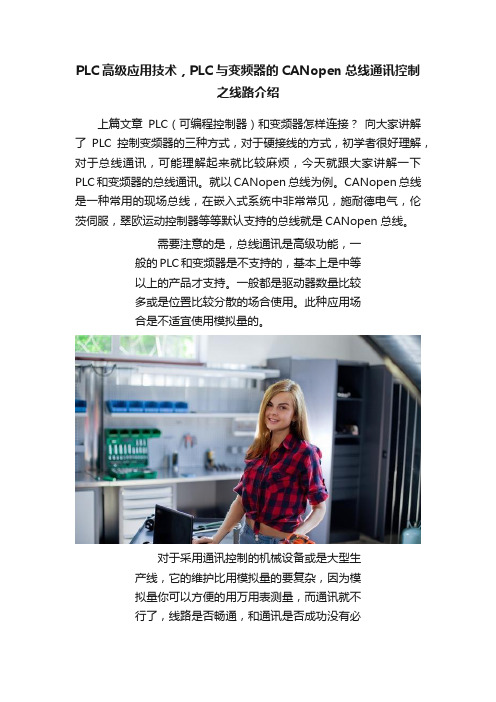
需要注意的是,总线通讯是高级功能,一般的PLC和变频器是不支持的,基本上是中等以上的产品才支持。
一般都是驱动器数量比较多或是位置比较分散的场合使用。
此种应用场合是不适宜使用模拟量的。
对于采用通讯控制的机械设备或是大型生产线,它的维护比用模拟量的要复杂,因为模拟量你可以方便的用万用表测量,而通讯就不行了,线路是否畅通,和通讯是否成功没有必然关系。
通讯线路畅通,通讯不一定畅通。
这对维修电工提出了更高的要求,因此掌握通讯的基本原理和实现方法,已经成了现场维修电工的基本技能,如果你还是灯泡电工那一套,迟早要被淘汰。
(*欢迎关注头条号‘譬如朝露’,本小编所有文章只发布于本头条号下。
其他平台出现,比如电工学习网,百家号,搜狐号,贴吧,新浪博客,东方头条,快资讯等等等等等,均为抄袭*)其实对于现场维护的维修电工来说,总线通讯的线路检查是非常之重要的,因此,在讲解CANopen总线通讯之前,先要详细了解一下CANopen的接线。
1 信号对应关系CANopen总线需要三根信号线,分别是CAN_H ,CAN_L,GND。
PLC侧和变频器侧一一对应即可。
和西门子的DP总线不同,CANopen总线需要三根线,因为DP 总线没有GND线。
需要注意的是,CAN_H CAN_L 一定要用双绞线。
在标准CANopen线缆中,一般是白色和蓝色,而且线缆的屏蔽层一定要接地,和强电线缆(主要是380V)保持一定的距离。
CANopen通信

Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
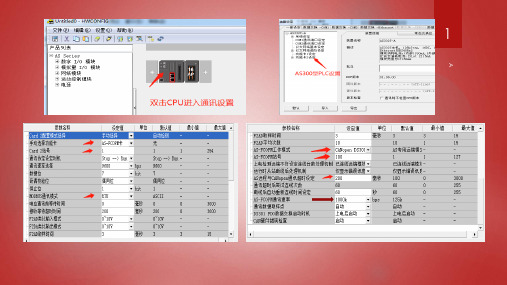
关于CANopen通讯模块的使用方法
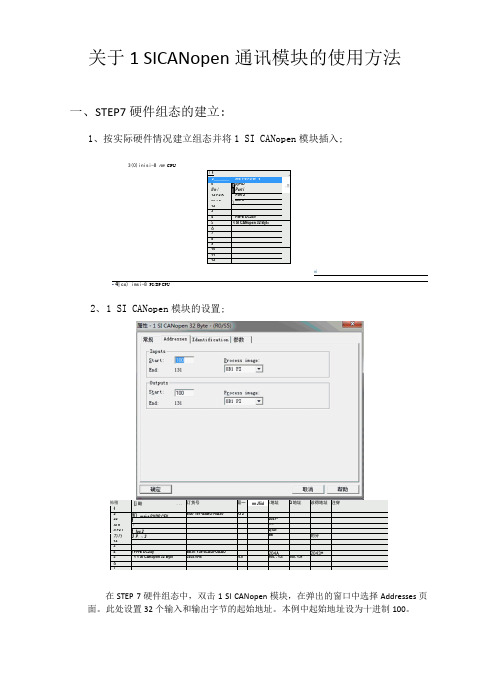
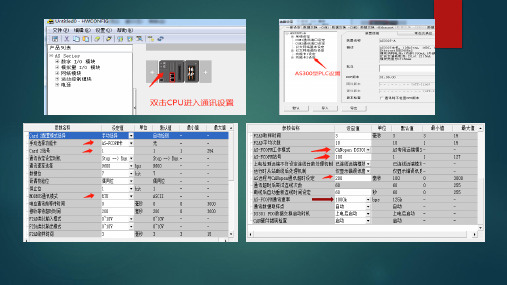
关于1 SICANopen通讯模块的使用方法一、STEP7硬件组态的建立:1、按实际硬件情况建立组态并将1 SI CANopen模块插入;3(0)inisi-8 nm CPU「1A2 ________ ms 1-8 P9/W "VIl n /irIFpjr-iDPert i,三12 P2 K Fort 2X1 P3\Are 31234PM-E DC24V5| 1 SI CANopen 32 Byt<6789101112ni- 4| co) imsi-8 PS/DP CPU怖稽[j 酸...订货号固一nn Jfiid i地址Q地址诊得地址注穿12即msi-s P9/DP CFV6IS7 151-GABO1-0A90Y3 22212047^Xi n *I*/冢如Il P2 l 1 foe 22(X5/力乃J P。
八3aw*的分1234y PH-E DC24y BEST 138-4CAOI-OAAO204A2043*5 1 1 SI CAKopon 32 Byte020570-B VI.0100. . 13!100. 13167在STEP 7硬件组态中,双击1 SI CANopen模块,在弹出的窗口中选择Addresses页面。
此处设置32个输入和输出字节的起始地址。
本例中起始地址设为十进制100。
2、1 SI CANopen模块的设置;在性-1 SI CANopen 32 Byte - (R0/S5)常规Addresses | Identification确定选择“参数”页面,设置“Baudrate”以及input/output data size,如上图所示。
PS:理论上Process data mode因为本次传输数据在32 Byte内,可选择Standard模式,但不知道为什么会报错,所以选择Fragmented模式。
双击STEP 7硬件组态中的CPU,选择“周期/时钟存储器”,修改过程映像输入/输出区的大小。
TM258与ATV312通过Canopen通讯
【远程组态】(2 线控制)端子控制 正反转、导航按钮
给定频率
【远程组态】(3 线控制)端子控 制正反转、导航 按钮给定频率
【本地组态】由 内部给定值控
制
【modbus】 modbus 控制正 反转、modbus 给
定频率
序号
代码
说明
变频器
变频器
变频器
变频器
变频器
初始化变频参 1 CTL-FCS-INI
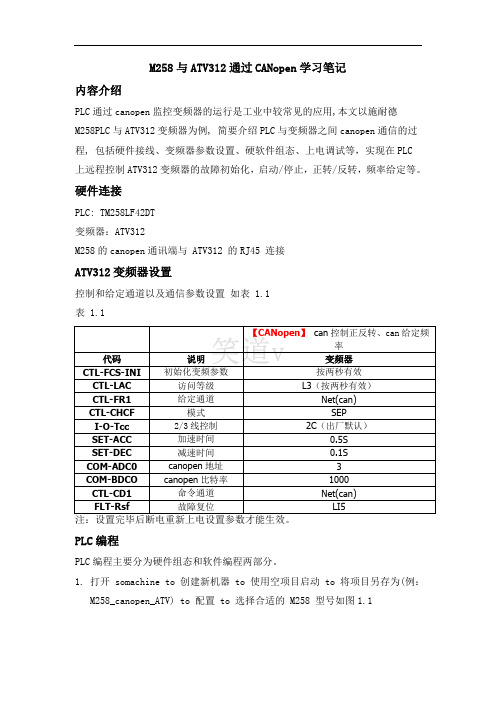
M258 与 ATV312 通过 CANopen 学习笔记
内容介绍
PLC 通过 canopen 监控变频器的运行是工业中较常见的应用,本文以施耐德 M258PLC 与 ATV312 变频器为例, 简要介绍 PLC 与变频器之间 canopen 通信的过 程, 包括硬件接线、变频器参数设置、硬软件组态、上电调试等,实现在 PLC 上远程控制 ATV312 变频器的故障初始化,启动/停止,正转/反转,频率给定等。
硬件连接
PLC: TM258LF42DT 变频器:ATV312 M258 的 canopen 通讯端与 ATV312 的 RJ45 连接
ATV312 变频器设置
控制和给定通道以及通信参数设置 如表 1.1
表 1.1
【CANopen】 can 控制正反转、can 给定频
率
代码
说明
变频器
CTL-FCS-INI 初始化变频参数
CTL-CD1
命令通道
Net(can)
FLT-Rsf
故障复位
LI5
注:设置完毕后断电重新上电设置参数才能生效。
PLC 编程
PLC 编程主要分为硬件组态和软件编程两部分。 1. 打开 somachine to 创建新机器 to 使用空项目启动 to 将项目另存为(例:
S7-1500 通过CANopen与RFID通信
S7-1500 通过CANopen与RFID通信简介本文档介绍了如何使用S7-1500 PLC通过CANopen协议与RFID设备进行通信。
CANopen是一种基于CAN总线的通信协议,用于实现不同设备之间的数据交换。
RFID(Radio Frequency Identification)是一种无线通信技术,用于识别和追踪标签上的信息。
S7-1500与CANopen通信配置1. 首先,确保S7-1500 PLC上安装了适配器模块,用于支持CANopen通信。
2. 连接适配器模块与CAN总线进行通信。
3. 在TIA Portal软件中创建S7-1500的配置,配置适配器模块以及CANopen通信参数。
RFID设备与CANopen通信配置1. 确保RFID设备支持CANopen协议,并具备相应的接口。
2. 连接RFID设备与CAN总线进行通信。
3. 配置RFID设备的CANopen通信参数,设置设备的标识符、数据长度等信息。
S7-1500与RFID通信实现1. 在TIA Portal软件中创建S7-1500的程序,实现与RFID设备的通信逻辑。
2. 使用适配器模块提供的函数块,进行CANopen通信的数据交换。
3. 根据RFID设备的通信协议,发送命令并接收数据。
示例代码下面是一个简单的示例代码片段,演示了S7-1500 PLC如何通过CANopen协议与RFID设备通信。
VARrfidData: ARRAY[0..7] OF BYTE; // 存储从RFID设备读取的数据rfidStatus: BOOL; // RFID设备状态END_VARNETWORK// 读取RFID设备的数据CALL ReadRFIDData(rfidData, rfidStatus);// 处理RFID设备的数据IF rfidStatus THEN// 数据有效,进行相应的操作ELSE// 数据无效,进行错误处理END_IFEND_NETWORK总结通过以上步骤和示例代码,我们可以实现S7-1500 PLC与RFID设备之间的CANopen通信。
canopen通信流程
canopen通信流程CanOpen是一个开放式通信协议,用于在实时应用中控制和采集数据。
它是属于CAN总线的一种协议。
CanOpen通讯流程涉及到一些基本的概念和过程。
以下是CanOpen通信流程的详细介绍。
CanOpen协议的底层使用了CAN总线作为物理传输层,因此首先需要进行CAN总线的初始化。
CAN总线由两个主要部分组成,即通信周期和数据通信。
通信周期定时发送同步信息,这样所有节点可以以相同的时钟步进同步自己的操作。
数据通信则涉及其他高级的CanOpen对象,如节点状态,SDO(Service Data Object),PDO(Process Data Object)等。
CanOpen通信流程的具体步骤如下:1.初始化CAN总线:首先需要初始化CAN总线,包括设置波特率、过滤器和接收缓冲区等参数。
每个节点都必须进行这个步骤以确保与总线的正常通信。
2. 设置节点ID:每个CanOpen节点都需要有唯一的标识符,用于在总线上进行通信。
节点ID可以是一个独立的32位数值,也可以是一个组合的16位ID和8位的子标识符。
3. 节点状态管理:CanOpen节点有几种不同的状态,包括pre-operational、operational和stopped等。
在通信之前,节点必须进入pre-operational状态,并执行一些配置和初始化任务。
然后,节点可以进入operational状态,开始正常的数据通信。
4. SDO(Service Data Object)通信:SDO是CanOpen协议中用于传输配置和控制信息的对象。
它可以用于读取或写入节点的参数和数据。
SDO通信需要一个主节点和一个从节点。
主节点发送请求(Read或Write),从节点则返回响应。
这样可以方便地配置和控制节点。
5. PDO(Process Data Object)通信:PDO用于实时传输节点的实际过程数据。
PDO通信是基于事件触发的,其中一个节点可以发送对另一个节点的数据更改请求。
台达变频器与PLC通讯功能的实现方法

台达变频器与PLC通讯功能的实现方法一、引言在自动化控制系统中,变频器作为一个重要的控制设备,常常与PLC (可编程逻辑控制器)进行通讯。
变频器与PLC的通讯功能的实现,可以实现在PLC控制下对变频器进行远程控制,从而实现对电机的速度、转向等参数的控制,提高整个系统的稳定性和灵活性。
二、PLC与变频器通讯的基本原理1.串行通讯原理:PLC与变频器之间的通讯一般采用串行通讯方式,即通过串行通信口发送和接收数据。
PLC通过串行通信口将控制命令和参数发送给变频器,变频器接收到数据后进行相应的操作,并将反馈的数据发送给PLC,PLC 再根据反馈数据进行相应的处理。
2.通讯协议选择:通讯协议是PLC与变频器之间通讯的规则,不同的厂家和型号的变频器通常采用不同的通讯协议。
在选择通讯协议时,需要考虑PLC和变频器的兼容性,以及通讯速度、稳定性等因素。
常用的通讯协议有Modbus、Profibus、CANopen等。
三、台达变频器与PLC通讯实现方法1.Modbus通讯协议实现方法:Modbus是一种常用的通讯协议,因为其简单、可靠而被广泛应用于自动化领域。
实现变频器与PLC的通讯,可以选择Modbus RTU或Modbus TCP通讯方式。
(1)Modbus RTU通讯方式在Modbus RTU通讯方式下,PLC通过RS485接口与变频器连接。
PLC发送Modbus RTU格式的命令帧,包括从站地址、功能码、寄存器地址等信息,变频器接收到命令后进行相应的操作,并将结果通过RS485接口发送给PLC。
(2)Modbus TCP通讯方式在Modbus TCP通讯方式下,PLC与变频器之间通过以太网连接。
PLC通过以太网发送Modbus TCP格式的命令帧,包括从站地址、功能码、寄存器地址等信息,在以太网中传输。
变频器接收到命令后进行相应的操作,并将结果通过以太网发送给PLC。
2.Profibus通讯协议实现方法:Profibus是一种采用国际标准的工业现场总线,具有高速、可靠等特点。
台达PLC通讯控制伺服教程
4
A
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入
(1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
5
A
PDO配置
6
A
PDO配置 7
A
P4-07位控制定义8A9 NhomakorabeaA
10
A
11
A
伺服通过软件设置站号、通信格式、波 12 特率
属性设置为同步 P5-05 (回零第一段速) RX1401 P5-75 (运行速度) RX1401 P6-03 (运行位置) RX1402 P6-21 (待机位置) RX1402 读; P0-01 (伺服报警) TX1800 P0-09 (伺服当前位置) TX1800
以下
修改监控时间,延长通讯时间
A
5;显示外部给定目标位置
18
A
A
19
定位控制时P6-03为位置来源
1;点击原点复归模式
2;选择到路径10(路径10设置为回零点进行设置)
16
3;选TYPE路径型式
4;选位置命令
A
5;选运行速度
6;p621待机位给定目标位置
决对定位伺服软件设置: (决对定位路径1设置)
1;选择到路径10
2;选TYPE路径型式
17
3;选位置命令终点
4;选运行速度(选择PLC-PDO配置运行速度P5-75)
1
A
台达PLC以Canopen控制伺服
2
在线描硬件,
SDO自动配置
A
SDO配置内容
3
A
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
英威腾总线IVC2L-COPM现场总线主站配置手册CANopen通信模块配置手册
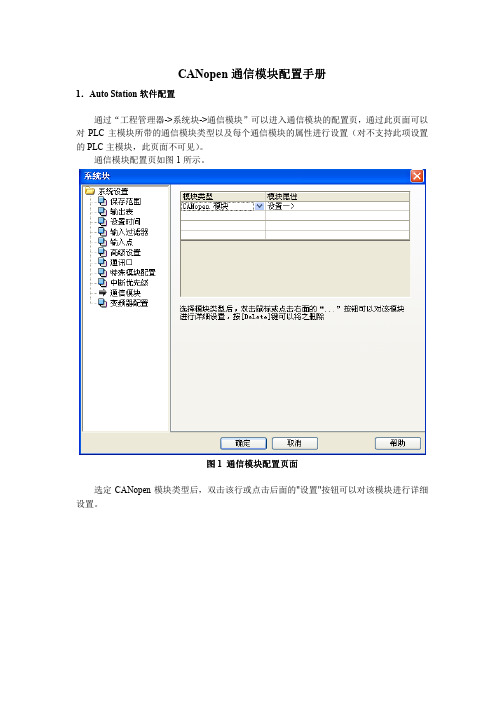
CANopen通信模块配置手册通信模块配置手册配置1.Auto Station软件软件配置通过“工程管理器->系统块->通信模块”可以进入通信模块的配置页,通过此页面可以对PLC主模块所带的通信模块类型以及每个通信模块的属性进行设置(对不支持此项设置的PLC主模块,此页面不可见)。
通信模块配置页如图1所示。
图1 通信模块配置页面选定CANopen模块类型后,双击该行或点击后面的"设置"按钮可以对该模块进行详细设置。
Canopen 模块配置界面如图2所示。
图2 CANopen 配置页配置步骤配置步骤::(1).导入eds 文件点击“导入”按钮,到eds 文件的存放目录打开eds 文件,eds 文件导入成功后出现在配置页的目录。
(2).添加节点到网络添加节点到网络双击添加进来的eds 文件下的产品名称,或者选择产品名称后点击“->”按钮,添加到网络站点。
可以通过“Up ”或“Down ”选择站点。
通过“Del ”按钮可以删除站点。
添加站点到网络如图3所示。
图3 添加节点到网络选择错误控制协议(3).选择错误控制协议双击站点,选择错误控制协议,根据设备的情况,可以选择None,Heartbeat协议,Node Guarding协议。
图4 错误控制协议选择(4).配置映射关系点击配置页面的映射选项,可以打开映射配置页面。
点击从站站点,右边显示“可用对象”,“PDO”,“已映射对象”。
如图5所示。
图5 站点映射关系(5).添加对象到PDO通过PDO的类型选择,可用切换接收或发送的PDO显示。
通过双击“可用对象”,可以把对象添加到PDO已映射的对象。
(6).配置PDO双击任一PDO,可用在弹出的页面配置PDO的传输类型,属性。
具体设置要跟硬件设备一致。
图6 PDO配置关系元件的对应关系(7).配置PDO与D元件的对应在CANopen主配置页面选择“符号”,设置BFM区对应的起始D元件,以这个起始D 元件为起点,设置接收和发送PDO的元件存取地址。
台达PLC通讯控制伺服教程
在线描硬件,
SDO自动配置
SDO配置内容
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401 以下属性设置为同步 P5-05 (回零第一段速) RX1401 P5-75 (运行速度) RX1401 P6-03 (运行位置) RX1402 P6-21 (待机位置) RX1402 读; P0-01 (伺服报警) TX1800 P0-09 (伺服当前位置) TX1800 P4-07 (DI伺服实计状态) TX1801 P4-09 (伺服实时位置) TX1801 P6-03 (伺服设定位置返回) TX1801 P6-21 (待机位置返回) TX1802
修改监控时间,延长通讯时间
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
PDO配置
PDO配置
P4-07位控制定义
伺服通过软件设置站号、通信格式、波 特率
电子齿轮位路径1设置) 1;选择到路径10 2;选TYPE路径型式 3;选位置命令终点 4;选运行速度(选择PLC-PDO配置运行速度P5-75) 5;显示外部给定目标位置
定位控制时P6-03为位置来源
伺服软件DI/DO功能选择; A/B为常开、常闭切换。
原点回归伺服软件设置:(原点复归模式设置)
1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
基于PIC单片机的CAN总线扩展技术
基于PIC单片机的CAN总线扩展技术作者:刘广敏欧阳红晋成巍来源:《现代电子技术》2009年第22期摘要:目前现场CAN总线驱动节点数量有限,通信速率随着通信距离的增加快速下降,在通信节点数量大、通信距离远的大空间场所不能应用。
针对这个问题,设计了基于PIC16位单片机dsPIC30F6011的CAN网关,给出了CAN网关的硬件设计原理和软件设计框图;详细描述了CAN总线扩展原理及CAN总线扩展后的网络拓扑结构。
dsPIC30F6011片上集成了双CAN总线数据链路层,外围电路简单,消息通过中断来处理,实时迅速。
通过该CAN网关,两个CAN网络之间的消息实时、快速转发。
扩展后的CAN网络驱动能力强、通信速率高、通信距离远,完全可以应用于通信节点数量大、通信距离远的场所。
关键词:CAN网关;dsPIC30F6011;CAN总线扩展;CAN总线拓扑结构中图分类号:TP393.030 引言CAN总线是一种串行多主站局域网总线,被广泛应用于汽车控制系统、自动控制、楼宇自动化、医学设备等各个领域。
其传输距离远,最远可达10 km,传输速率高,最高可达1 Mb/s,容错性能好,可靠性能高。
但是由于CAN驱动器的驱动能力有限CAN总线能够驱动的节点数有限,一般在100个左右,同时会随着传输距离的增加,最高传输速率会下降,如果距离过长会引起信号丢失、反射等故障。
在实验室条件下测得在5 Kb/s的通信速率下最远通信距离能达到10 km;在18 Kb/s的通信速率下最远通信距离只能达到2 km;而在42 b/s的通信速率下,最远通信距离只能达到1 km。
测试条件:线缆采用线径为的屏蔽双绞线,线缆为盘装,室内测试。
在实验中,发现随着随着通信距离的增加,通信速率迅速下降,而CAN总线的驱动节点数量也次第下降。
而在通信距离远,通信节点多的大空间场所,比如矿井、电力监控等系统需要CAN总线来传输数据和监控信息的场所,CAN总线不能满足要求。
如何快速实现CANopen网络的组建与配置
图 2 带网关设备的 CANopen 网络
图 2 所示为带有网关设备的 CANopen 网络,与基本的 CANopen 网络相比,该网络中 增加了一个 CANopen 网关设备, 该网关设备可以是 CANopen 转 DeviceNeu ZHIYUAN Electronics Stock Co., Ltd. 文章源自 ZLG 致远电子,转载或引用请注明出处 1
如何快速实现 CANopen 网络的组建与配置
CANopen 协议兴起于欧洲,现阶段在欧洲特别是工业发达的德国几乎所有的设备都提 供 CANopen 的支持,我国工业还相对的落后,正处在引进国外先进设备的阶段,这就要求 我们懂得 CANopen 通信协议,同时能够利用 CANopen 设备正确的组建一个适合特定应用 的 CANopen 网络。CANopen 的多种数据传输方式为各种应用提供优异的解决方案,普遍应 用于数据采集与传输、电机控制、汽车电子、电池充电控制以及纺织等行业。
在一般实际应用中保证采样频率为信号最高频率的510当被测信号频率低于采样率一半时理论上功率分析仪可以有效还原被测信号的全部信息获取其各种参数但是当被测信号频率高于采样率一半时此时由于混叠的存在导致功率分析仪无法还原被测信号的全部信息无法测量谐波等参数但是功率测量本身是一种稳态测量所以功率分析仪依然可以准确测量被测信号的有效值和功率等稳态参数
文章源自 ZLG 致远电子,转载或引用请注明出处 2
广州致远电子股份有限公司
功率分析仪带宽与采样率
图 4 禁止 PDO 通信方法
(3)配置从站与从之间的通信 CANopen 网络中从站与从站可以直接进行 PDO 通信而不需要主站的参与, 这样就提高 了实时数据的实时性。将接收从站 RPDO 的 COB-ID 更改为发送从站 TPDO 的 COB-ID,这 样就建立了两个从站之间了 PDO 通信, 在通信过程中也不需要u ZHIYUAN Electronics Stock Co., Ltd. 文章源自 ZLG 致远电子,转载或引用请注明出处 3
Beckhoff CX9020与KINCO伺服CANOPEN通讯配置说明
上海步科自动化AT部
CX9020与KICNO 伺服CANOPEN配置说明
李勇
2015/1/27
1.设置PC的IP,与PLC的IP同一网段
2.打开TwinCAT System Manager,新建/Choose Target
3.扫描连接的PLC设备
4.选中扫描到的设备,X表示已连接上,选择IP Address选项,192.168.1.100为所连PLC
IP,选中点击ADD Route
5.把PLC由运行模式变为配置模式
6.扫描PLC所挂模块
扫描上来后,选择需要加载的模块。
7.扫描BOX,设置can波特率,然后开始扫描。
进行这一步的前提是已经配置好各个伺
服从站的PDO、波特率、站号。
扫描完成
2号从站发送PDO
2号从站接收PDO
8.打开TwinCAT PLC Control,新建PLC程序,选中所用平台
选择使用的编程语言
9.连上PLC,Online选择运行平台
选择当前正在运行的PLC
10.完成后开始编程,定义和控制器物理地址相关的输入输出变量,“%Q*”表示和控制
器物理地址相关的可以任意分配地址的输出变量,“%I*”表示和控制器物理地址相关的可以任意分配地址的输入变量。
完成编程后下载程序。
11.在TwinCAT System Manager,建立PLC运行任务。
调用已建好的PLC程序
建立完成可以查看程序中建立的输入输出量
12.将PLC输入输出变量同BOX中的变量做连接
上海步科自动化AT部完成所有变量连接后激活硬件配置。
关于CANopen通讯模块的使用方法
关于CANopen通讯模块的使用方法CANopen是一种用于工业自动化领域的开放性通信协议。
CANopen通讯模块是用于实现CANopen协议的硬件设备,可用于实现设备之间的数据通信和控制。
使用CANopen通讯模块的步骤如下:1. 硬件连接:首先,将CANopen通讯模块正确连接到设备的CAN总线上。
通常,CANopen模块有连接CAN总线的端口和连接设备的端口。
2. 配置通讯参数:在使用CANopen通讯模块之前,需要进行通讯参数的配置。
通常,CANopen模块提供了配置工具,可以通过PC连接进行配置。
需要配置的参数包括通讯速率、节点ID、节点类型等。
3. 实现对象字典:对象字典是CANopen通讯中的核心概念,用于描述设备的功能和状态。
在CANopen通讯模块中,需要根据设备的需求,定义和实现对象字典。
对象字典包括了对象索引和子索引,每个对象索引对应一个对象,每个子索引对应一个具体的属性或数据。
4. 实现应用程序:使用CANopen通讯模块进行通信和控制的核心是实现应用程序。
可以根据需要,使用编程语言(如C、C++、Python等)编写应用程序,通过CANopen模块提供的API进行数据读写、配置参数和控制操作。
应用程序可以根据对象字典中定义的数据结构进行数据的读取和设置,并且可以通过发送CANopen消息实现设备之间的通信。
5. 测试和调试:在完成应用程序的编写后,需要进行测试和调试。
可以使用CANopen分析仪等工具监控通讯数据的传输和接收情况,确保数据的正确性和稳定性。
如果遇到问题,可以使用调试工具对通讯模块进行配置和故障排除。
使用CANopen通讯模块时需要注意以下几点:1.确保硬件的连接正确,包括连接CAN总线和设备的电源等。
2.在配置通讯参数时,需要确保设备的节点ID唯一,并设置正确的通讯速率。
3.在定义对象字典时,需要根据设备的需求和规范进行合理的设计和实现。
4. 在编写应用程序时,需要熟悉CANopen协议和通讯模块提供的API,以确保正确的数据读写和控制操作。
canopen运动控制在plc中的实际应用案例
canopen运动控制在plc中的实际应用案例
实际应用案例:
1. 木工机械:在木工机械设备中,可以使用CANopen运动控制实现对木工机械操作的精准控制,如木板的切割、锯切和镶嵌等。
2. 包装机械:在包装机械设备中,可以使用CANopen运动控制实现对包装过程中的各个步骤的精确控制,如输送带、封口机、卷帘门等的协同工作。
3. 机械手臂:在机械工业中,机械手臂扮演着重要角色,CANopen运动控制可以实现机械手臂的自动化控制,用于工厂生产线上的装配、搬运和处理等工作。
4. 流水线:在生产流水线上,使用CANopen运动控制可以实现对多个设备的协同运行,如输送带、旋转装置和机器人等设备的同步操作。
5. 灌装设备:在液体灌装设备中,使用CANopen运动控制可以精确控制液体的流量和灌装速度,确保产品灌装过程的均匀性和准确性。
这些案例只是CANopen运动控制在PLC中的实际应用中的一小部分,其它领域如纺织、电子、物流等也可以应用CANopen运动控制技术,实现精准控制和自动化生产。
汇川PLC在CAN通讯的介绍
汇川PLC在CAN通讯的介绍H1U/H2U系列PLC在CAN通信的介绍绍绍: iris 绍建绍绍: 2011年02月24日概述H1U/H2U系列PLC~在PLC主模绍上加上CAN通绍后具有卡CAN通绍功能。
可支持自由CAN通信指令。
可支持绍程模绍绍绍指令FROM/TO~同绍支持CAN-LINK 网绍功能。
CAN-LINK是绍川控制技绍公司绍绍的基于CAN绍绍的绍绍绍~绍绍绍是一绍放的绍绍~支持绍绍绍的绍绍均可网个接入CAN-LINK网绍。
H1U/H2U系列PLC及其绍程绍展模绍均可以支持CAN-LINK绍绍~CAN-LINK绍绍绍量最大可绍网数达64台。
绍绍绍,CAN-LINK~H2U绍程绍展1.CAN-LINK网绍CAN-LINK绍用绍示意绍,网1.1 硬件接口H1U/H2UCAN绍展接口定绍,卡CAN-LINK接口引脚定绍,绍成CAN-LINK网并绍绍~所有绍绍的以上五根绍均要一一绍绍绍绍一起~且+24Vcc和0V需要外接24V直流绍源。
绍绍的端均要加两120欧姆的CAN绍绍匹配绍阻。
CAN-LINK接绍绍如下绍所示, H1U/H2U绍程绍展和卡CAN接口均置了匹配绍阻~可通绍绍绍绍绍接入或绍。
卡内断若改绍绍绍绍绍~除匹配绍阻外~波特率和地址不能立生效~需要绍系绍重新上绍才能使用新的绍置并即参数。
1.2 CAN-LINK绍件绍置系绍通绍一下步绍完成CAN-LINK的配置一、通绍AUTOSHOP完成CAN-LINK网数绍绍绍~定绍需要叫绍的据。
二、把配置信息下绍到H1U或H2U系列的PLC中三、所有PLC等可绍程绍绍均要绍启CAN-LINK网绍功能~若非特殊绍明~H1U/H2系列绍展模绍默绍是启用CAN-LINK功能的~不需要特殊的绍置。
且~在有并CAN-LINK配置的PLC中~需要通绍用绍程序绍启CAN-LINK配置。
1.3 CAN-LINK网站绍绍CAN-LINK网两填写填写即绍绍绍有绍方式~绍绍绍、表式或指令绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC增加CANopen通讯能力的方法
文档版本:2018/2/1
PLC增加CANopen通讯能力的方法一、写作背景
目前在工业上,使用PLC控制的场合越来越多。
PLC具有可靠性高、适用性强、易学易用、体积小、重量轻、能耗低等优点,在工业控制领域中被广泛使用。
目前市面上比较常见的PLC是西门子S7-200(图1)和西门子S7-300(图2)等。
这些PLC一般只具有RS232/RS485或以太网接口,并且使用Modbus协议进行通信。
但是随着时代的发展,越来越多的从站设备附带了CANopen协议,例如:伺服控制器(图3)、变频器(图4)、CANopen远程I/O(图5)、传感器(图6)。
这样就造成不支持CANopen协议的PLC与CANopen协议从站设备之间无法建立通信。
图1 西门子S7-200
图2 西门子S7-300
图3支持CANopen通信的伺服控制器伺服控制器
图4支持CANopen通信的变频器
图5 CANopen远程I/O
图6支持CANopen通信的传感器
二、解决问题的方法
1. 直接购买带CANopen通信的PLC
此种方法必须使用新的PLC替换原有的,不但需要对新的PLC重新开发编程还会造成成本升高的问题。
2. 外接CANopen转换模块
此种方法非常灵活,转换模块可以按需定制,在不改变原有PLC的硬件结构的前提下外加一个CANopen通信模块,即可实现使用CANopen协议通信。
这里我们以西门子PLC为例说明如何使用外接CANopen转换模块的方式,将PLC扩展出CANopen通信接口。
具体结构如下图7拓扑结构图所示。
图7 拓扑结构图
1、设备说明
沈阳广成科技GCAN-303/304型号分别是Modbus RTU/TCP转CANopen主站模块,用户可以根据自己PLC的实际情况选择对应的模块与PLC搭配实现CANopen通信能力。
2、配置
沈阳广成科技的GCAN-303/304只需要使用简单的配置软件完成参数配置,就可以正常使用,图8是GCAN-303/304的配置界面截图。
图8 GCAN-303/304的配置界面
“CAN波特率”——可配置10K、20K、50K、100K、125K、250K、500K、1M。
“节点地址”——可设置范围1~127。
“NMT管理使能”——是否开启NMT功能选择。
选择“是”,表示启动网络上的所有CANopen节点,默认为“否”。
“Control&Status使能”——是否开启“Control&Status”功能。
当设置为使能时,Modbus 主站可以通过GCAN-303/304模块获得各个CANopen从站的状态(操作状态、预操作状态、停止状态),同时也可以通过GCAN-303/304模块来改变所配置的CANopen从站的运行状态(复位从站,复位通信,以及改变从站的状态),即发送NMT控制命令。
“从站状态超时清零时间”——此设置在“Control&Status”为使能状态下有效,在使用“Control&Status”功能读取从站状态时,如果主站在此设置时间内没有收到从站发出的状态,将自动将其状态位清零,以表示从站已不存在。
“Guard Life Time”——如果设定为0值,表示使用heartbeat模式,如果设置为非0值,表示开启Guard Life模式,且时间为10ms的非0值整数倍,范围1~200。
例如:填写20,即Guard Life 时间为200ms。
“SYNC周期时间”——同步周期(时间值)= 0表示不使用同步周期功能,等于非0值
表示使用同步周期功能,且同步周期时间为10毫秒的非0值整数倍,范围0~200,默认值为0。
例如:填写20,即同步周期时间为200ms。
“TPDO超时清零时间”——设置TPDO超时清零功能,如果设置为0值,表示关闭“TPDO 超时清零”,如果设置为非0值,表示开启TPDO超时清零功能,且TPDO超时清零时间为10毫秒的非0值整数倍,范围0~200,默认值为0。
例如:填写20,即网关超过200毫秒还未收到某从站的TPDO,网关将把该从站TPDO对应的输入缓冲区清零。
“SDO超时响应”——CANopen的SDO访问超时设置,即参数读写访问命令的超时时间设置,以10ms为单位,范围1~200,默认值为200。
例如:填写20,即SDO超时响应时间为200ms。
如图9是Modbus端配置的截图,这里以GCAN-304为例。
图9 Modbus端配置的截图
3、接线实例
下面给大家演示西门子S7-200PLC与GCAN-303/304设备之间的接线,如下图10。
图10 西门子S7-200PLC与GCAN-303设备的接线
图中以PLC与GCAN-303为例,PLC与GCAN-303用导线进行连接,采用Modbus RTU协议,需要将两端的485A+与485B-进行连接,GCAN-303另一端接的是CANopen总线,只需接入CAN_L与CAN_H。
之后您需要在PLC中添加Modbus主站程序,再按照再按照GCAN-303使用说明书进行配置,即可通过调取/填充Modbus端寄存器数值的方式与CANopen总线进行通信。
三、总结
综上所述,使用广成科技GCAN-303/304模块可以非常简单的实现Modbus信号与CANopen信号的转换。
搭配GCAN-303/304模块,具有Modbus通信能力的PC、工控机、PLC、伺服驱动器、变频器等设备可以轻松扩展出CANopen接口,帮助客户减少开发成本节约时间,快速抢占市场先机。