Step-Servo_Quick_Tuner_用户手册_-_中文.pdf
埃斯顿伺服器用户手册
P roNet系列交流伺服用户手册P roNet SERIES AC SERVO USER MANUAL(版本号:V1.06)手册概要⏹本手册以ProNet型伺服驱动器的用户为对象,就下列内容作以说明:·伺服电机及伺服单元的到货确认及规格型号·伺服电机及伺服单元的安装方法·伺服电机及伺服单元的配线方法·伺服驱动器的运行方法·面板操作器的使用方法·通讯协议·伺服电机及伺服单元的技术规格和特性⏹本手册的适用阅读对象如下:·ProNet伺服驱动器的程序设计及详细设计工作者·ProNet伺服驱动器的安装及配线工作者·ProNet伺服驱动器的试运行及伺服调整工作者·ProNet伺服驱动器的维护及检修工作者⏹本手册中基本术语的含义:本手册中,在没有特殊说明的情况下,下列术语所表达的意思如下∶伺服电机:EMG,EMJ,EML,EMB 型伺服电机伺服单元:ProNet型伺服单元伺服驱动器:一组伺服电机与伺服单元伺服系统:由伺服驱动器与上级装置以及外围机器配套组装成的一组伺服控制系统[使用前的注意事项]■严禁将伺服电机直接与市网电源连接。
严禁将伺服电机直接与市网电源连接,极易损坏伺服电机。
伺服电机没有伺服单元的支持,不能旋转。
■接通电源后禁止插、拔驱动器上的接插件。
带电插、拔极易损坏驱动器的内部电路和电机编码器,请在断电后再插、拔接插件。
■断电5分钟后才能进行伺服系统的检查作业。
即使切断电源,伺服单元内部的电容中仍然存储有相当的电量,为了防止触电事故的发生,建议在确认CHARGE指示灯灭之后,再过5分钟才能开始进行伺服系统的检查操作。
■伺服单元与电柜中其它设备的安装间隔需保持在10mm以上。
伺服单元易发热,应尽可能选择有利于散热的安装布局,与电柜中其它设备的横向间隔最好在10mm以上,纵向间隔最好在50mm以上,安装环境最好不受结露、振动、冲击的影响。
埃斯顿PRONET用户手册

耐热等级
F
环境温度
0 to +40℃ (不结冻)
环境湿度
20% to 80% RH (不结露)
保护方式
全封闭,自冷,IP65 (除输出轴承和连接器)
抗振性能
49m/s2
注:括号内的数值表示的是带制动器电机的值。
● 转矩-转速特性 (A:连续工作区域,B:反复工作区域)
10A□A□□ 1000 3.18 9.55 5.3 15.9
ESTUN 伺服电机 EML 型
【1+2】 【3】 【4】 【5】 【6】 【7】
【1+2】额定输出功率
记号
规格
10 1.0kW
27.0 14.5(15.1)
36.0 2000 3000 19.0(19.6)
编码器
标准 选项
17 位增量式:131072P/R 17 位绝对值:131072P/R; 旋转变压器
耐热等级
F
环境温度
0 to +40℃ (不结冻)
环境湿度
20% to 80% RH (不结露)
保护方式
全封闭,自冷,IP65 (除输出轴承和连接器)
AC 伺服驱动器
ProNet 用户手册
ESTUN
产品体系
小功率
系列
EMJ
3000min-1
EMG
2000min-1
EML
1000min-1
EMB
1500min-1
伺服电机
功率
200W 400W 750W 1000W 1.0kW 1.5kW 2.0kW 3.0kW 5.0kW 1.0kW 2.0kW 3.0kW 4.0kW 7.5kW 11kW 15kW
ESTUN 伺服电机 EMG 型
STEP机器人快速操作手册-B
9. 选中“AXISPOS”,点击“确认”。
12. “保存”弹出的编程语句。
13. 手动模式下运行程序: 长按三位开关上使能,一直按住示教 器控制面板右侧“ ”键,此时机 器人就会由当前点运动到终点位置, 程序状态栏右上方会变成“ ”;(若 想中途暂停机器人运动,只需松开 “ ”键,状态变为“ ”;若要 继续运行,就再次按下“ ”键;) 运行结束后松开三位开关断使能,此 时状态变为“ ”。
机器人快速操作手册
手册概述
关于本手册
本手册为机器人操作的快速入门手册,旨在短时间内提升客户对机器人的熟 知度。
操作前提
操作机器人前,请务必仔细阅读《STEP 机器人操作安全手册》,用户需在了 解安全知识的基础上才可使用机器人。
目标群体
操作人员 产品技术人员 技术服务人员 机器人程序员
手册说明
本手册内容会有补充和修改,请经常留意我公司网站,更新操作手册。 我公司官方网址:。
5. 依次点击“示教”“OK”,当前点示教完成。 6.“保存”弹出的程序,再点击“新建”。
8
SPD-13-00-B
机器人快速操作手册
7. 点击“运动语句”,选中“PTP”。
8. 选中“pos:Postion”,点击“新建”。
10. 示教要到达的位置点:按下三位开关(一 直按),点动示教器控制面板右侧“+”“-” 键,把机器人移动到自己想要的位置后, 松开三位开关。
LED-Motion 变亮。
4. 上使能保持三位开关 按住,另一只手依次点动示 教器控制面板右侧“+”“-” 按键,确认六个轴可以正常 运行。每一行“+”“-”键代 表各个轴运动的相反方向。 松开按键,机器人停止运动, 松开开关,机器人使能断掉。 (注意:机器人运动过程中 不能断使能,否则会报错)
伺服软件使用说明_最简洁版

ECO2WIN使用说明-简洁版深圳市步科电气有限公司目录第一部分: 特别需要注意的事项 (3)第二部分: 建立一个简单的工程 (9)第三部分: 进行简单的控制 (16)1功能介绍 (16)2 驱动器关键参数的设置 (17)电机参数设置 (17)电流环参数 (19)速度环PID调节 (20)位置环PID调节 (21)3 保存参数: (22)4 绝对位置、相对位置控制 (25)5 速度模式 (27)6 原点模式 (29)7 脉冲方向控制模式(跟随模式) (30)第四部分: 故障诊断 (34)第一部分: 特别需要注意的事项1、EC2WIN的所有文件,包装安装文件、电机参数文件、工程文件等都需要您放在英文目录下,同时必须详细阅读该手册里所有粗体或者带颜色的字体,运行电机前请确保所有连接线均正确连接到驱动器上;2、PC与ED伺服之间的连线为2、3、5脚直连线;3、如果您使用的是ED400、ED430、ED600、ED630系列的伺服驱动器,请先更新软件再进入下一步。
更新软件方法如下:把附件里的“DEV”文件夹里的两个文件解压出来,然后复制到EC2WIN的安装目录D:\Program Files\JAT\ECO2WIN\Dev里的两个文件“ENU和DEU”两个文件夹,替换以前的这两个文件即可。
4、如果您使用的3相电机,那么在新建或者连接已经建好的工程之前先用ECO2LOAD软件更新电机参数,三相电机的参数文件请参考附件,这些参数包括位置环、速度环、电流环、电机参数设置等参数,这样可以节省您设置这些参数的时间,同时也避免不小心设置成一个错误的值。
更新方法如下:1、打开“开始”菜单里的ECO2LOAD软件:2、然后进入软件界面:Write data into device:写参数到伺服驱动器;Read date out-of device:从伺服里读参数到文件Administration:管理伺服驱动器,用于重启和存储参数Load parameter list:选择读、写参数的内容,用来选择所要读取和做写入的是驱动器的哪些参数,正常情况下不用动这个按钮。
Quick 8802 系列数控伺服控制系统使用说明书
Quick 8802 系列数控伺服控制系统使用说明书 Digital Servo Control System Operation Manual安全操作指南 General safety instructions在使用前,一定要仔细阅读本操作指南与所搭配的缝制机械说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
在使用或安装本机器时,请注意下列事项。
Please read this manual carefully, also with related manual for the machine head before use. For perfect operation safety , i nstalling and operating this product by trained personnel is required. When install and operate this product, precaution must be taken as following.1 .请尽量远离电弧焊接设备或电波发射器等,以免产生的电磁波干扰本控制器而发生误动作。
2 .请不要在室温 45 °C 以上或者 0 °C 以下的场所使用。
3 . 请不要在湿度 30 % 以下或者 95 % 以上或者有露水和酸雾的场所使用。
4 .安装控制箱及其他部件时,请先关闭电源并拔掉电源插头。
5 .为防止干扰或漏电事故,请做好接地工程,电源线的接地线必须以牢固方式与大地有效连接。
6 .所有维修用的零部件,须由本公司提供或认可,方可使用。
7 .修理及保养作业,要请经过培训的技术员执行。
在进行任何保养维修动作前,必须关闭电源并拔掉电源插头。
控制箱里有高压危险,必须关闭电源五分钟后方可打开控制箱。
8 .本手册中标有 符号之处为安全注意点,必须注意并严格遵守,以免造成不必要的损害。
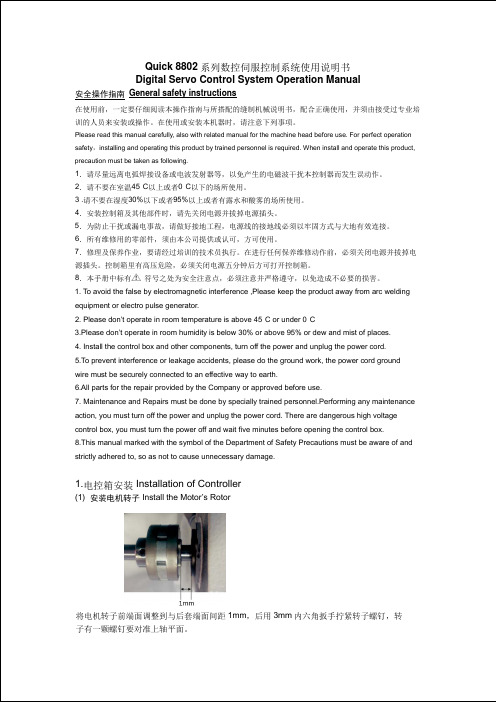
. To avoid the false by electromagnetic interference ,Please keep the product away from arc welding 1 equipment or electro pulse generator.2 . Please don’t operate in room temperature is above 45°C or under 0°C ·3 .Please don’t operate in room humidity is below 30% or above 95% or dew and mist of places.4 . Install the control box and other components, turn off the power and unplug the power cord.5 .To prevent interference or leakage accidents, please do the ground work, the power cord ground wire must be securely connected to an effective way to earth.6 .All parts for the repair provided by the Company or approved before use.7 . Maintenance and Repairs must be done by specially trained personnel.Performing any maintenance action, you must turn off the power and unplug the power cord. There are dangerous high voltage control box, you must turn the power off and wait five minutes before opening the control box. 8 .This manual marked with the symbol of the Department of Safety Precautions must be aware of and strictly adhered to, so as not to cause unnecessary damage.1. 电控箱安装 Installation of Controller(1) 安装电机转子 Install the Motor’s Rotor将电机转子前端面调整到与后套端面间距1mm ,后用3mm 内六角扳手拧紧转子螺钉,转 子有一颗螺钉要对准上轴平面。
ESTUN SERVO SYSTEM 伺服系统说明书

SERVO SYSTEMGeneral Automation Product ProductFamilyTechnicalFeatureDesignValueService ● Having a number of offi ces and service outlets home and abroad to provide fast response to customers' needs● 24-hour technical service hotline● Genius service● F1000 HMI Series (Size 7” 10” )● EP1000 PLC Series (Up to 256 Local DI / DO, PLC with network)● ESMotion MC Series (Programmable, Modular structure motion controller)● Open CNC composed by F1000 & ESMotion & EP1000 Freely● 20 years of professional design of automatic control systems, commissioning experience● Not only provide a single product, but also specializes in providing total solutions● Not only design standerd products, but also customize products● Better understanding of customer needs, know how to increase the value of your project● Desined by embedded systems, open architecture, modular concept● Standard fi eld bus, Modbus TCP, CANopen, EtherCAT● Based on hardware and software platform, HMI, PLC, MC integration together perfectly● Modular hardware design and fi eld bus Connection● Software design tends to flexible, user-friendly, easy to secondary development and powerful encryptionProvide total solution for varies applications2D / 3D machineSpring machineScara robot Punching manipulatorCNC engravingand milling machineWood engraving andmachining centersQuilting machineSewing machinePacking machineRotary shear / fl y cuttingFeaturesProNet Series AC Servo SystemServo Drive(ProNet-E)●Wide range, various models: 0.05kW ~ 22kW ●Current forward feedback control, acceleration forward-feed: high responsiveness Multiple feedback options: 17bits serials encoder, 2500P/R encoder, resolver Various communication protocols: CANopen, EtherCAT, POWERLINK, PROFIBUS, Modbus machine, wood making machine, packing machine, textile machine, printing machine, robot arm,ADD: 16 Shuige Road, Jiangning Development Zone,Nanjing 211106, P .R.ChinaTEL: +86-25-52785960FAX: +86-25-52785576Hohai UniversityJiangning CampuspusESTUNDaoCheng Xin Da Dao S55 Ning Xuan Gao Suo Su Jiang Jun Da Dao Yun Qi Jie Fo Cheng Xi LuFo Cheng Dong LuSu Yuan Da Dao T o d o w n t o w n Nanjing SouthRailway StationTian Yuan Xi LuAirport Express Shui Ge LuShui Ge Lu Nanjing Lukou Int’l AirportJiang Jun Da Dao ShanghaiAirp ESTUN AUTOMATION TECHNOLOGY CO.,LTD E-mail:**************DriveVersion: GAP-201411。
ServoGun_TC_4.1 翻译本
1 介绍................................................................................................................................................. - 5 1.1 用户组....................................................................................................................................- 5 1.2 相关工业机器人文档............................................................................................................- 5 1.3 安全图标及其含义................................................................................................................ - 5 1.4 术语........................................................................................................................................ - 6 -
2 产品描述......................................................................................................................................... - 8 2.1 伺服焊接包——概览............................................................................................................- 8 2.2 连续运动速度......................................................................................................................- 10 2.3 连接电缆概述......................................................................................................................- 10 2.4 技术包的使用目的.............................................................................................................. - 11 -
诺普特智能控制系列Servo驱动器及Servomotor说明书
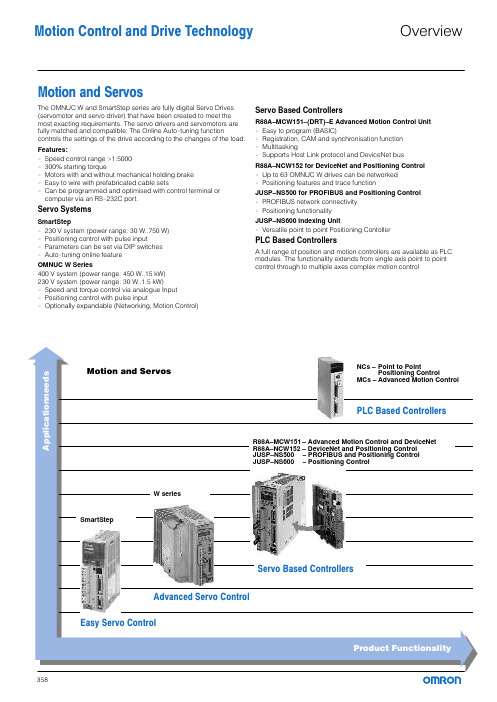
Motion and ServosThe OMNUC W and SmartStep series are fully digital Servo Drives (servomotor and servo driver) that have been created to meet the most exacting requirements. The servo drivers and servomotors are fully matched and compatible. The Online Auto−tuning function controls the settings of the drive according to the changes of the load. Features:−Speed control range >1:5000−300% starting torque−Motors with and without mechanical holding brake−Easy to wire with prefabricated cable sets−Can be programmed and optimised with control terminal or computer via an RS−232C port.Servo SystemsSmartStep−230 V system (power range: 30 W..750 W)−Positioning control with pulse input−Parameters can be set via DIP switches−Auto−tuning online featureOMNUC W Series400 V system (power range: 450 W..15 kW)230 V system (power range: 30 W..1.5 kW)−Speed and torque control via analogue Input−Positioning control with pulse input−Optionally expandable (Networking, Motion Control)Servo Based ControllersR88A–MCW151–(DRT)–E Advanced Motion Control Unit−Easy to program (BASIC)−Registration, CAM and synchronisation function−Multitasking−Supports Host Link protocol and DeviceNet busR88A–NCW152 for DeviceNet and Positioning Control−Up to 63 OMNUC W drives can be networked−Positioning features and trace functionJUSP–NS500 for PROFIBUS and Positioning Control−PROFIBUS network connectivity−Positioning functionalityJUSP–NS600 Indexing Unit−Versatile point to point Positioning ContollerPLC Based ControllersA full range of position and motion controllers are available as PLC modules. The functionality extends from single axis point to point control through to multiple axes complex motion controlMotion Control and Drive Technology OverviewThe SmartStep series has been designed to address the requirements of the low cost point−to−point motion market. These include fast response, accuracy and reliability. The SmartStep is an ideal alternative to stepper motors.The controller features Positioning Control with pulse input.The power range of this series ranges from 30 W..750 W, equivalent to 0.318..2.39 Nm of torque at 3000 rpm. The supply voltage is 230 V (50/60 Hz; single−phase).Characteristics:−Very compact design of motor and drive−Max. motor speed 4500 rpm, speed control range >1:5000−Rapid commissioning with the Online Autotune function−Motors available with and without mechanical holding brake−Parameters can also be set via DIP switches−300% acceleration torque−Easy to wire with prefabricated cable sets−Low weight−Convenient to operate from a control terminal−Computer programmable via RS−232CportSystem layout for simple positioning application.MotionandServosSystems without holding brake (3000 rpm motors)Systems with holding brake (3000 rpm motors)Encoder cable/motor cable without holding brake: R7A–CEAxxx–S Encoder cable/motor cable with holding brake: R7A–CEAxxx–B xxx = Cable length (see Accessories, page 364).SpecificationsCylindrical design motors without/with holding brakeSpecification for cylindrical design motors with holding brakeM o t i o n a n d S e r v o sCube design motors (without/with holding brake)Specification for cube design motors with holding brakeSmartStepM o t i o n a n d S e r v o sCables and Terminal block connections between SmartStep Servo drive and the PLC Positioning Control Unit. Without communications support.* 2 Terminal blocks and 2 Cables to the PLC are required for the C_W−NC4xx Units (4 axes).Cables and terminal block connections between SmartStep Servo drive and the PLC Positioning Control Unit.With communications support.blocks and 2 Cables to Other accessoriesProgramming and DocumentationProgrammingTechnicalDocumentationServo driver, 230 VLine filter, footprint, 230 VServomotors, cylindrical design (without brake), 230 VServomotors, cylindrical design (with brake), 230 VServomotors, cube design (without brake), 230 VServomotors, cube design (with brake), 230 VM o t i o n a n d S e r v o sMotion Control andMotion and Servos − SmartStep Drive TechnologyThe OMNUC W series is an advanced servo system designed to meet the demands of machine design. Motors and drives are fully matched and compatible. The optimum controller setting is continuously computed during operation by an online self−optimising function, so the servo always operates with maximum dynamics irrespective of load.The OMNUC W Series offers speed/torque and positioning control in a single unit. The servo drivers are available with a three−phase 400 V supply in a power range from 200 W..15 kW or single−phase 230 V supply in a power range from 30 W..1.5 kW.Characteristics:− All−in−One" compact controller with speed/torque and positioning control−Expandable with optional slot for positioning, advanced Motion control and networking−Motor protection class:200V class, IP55400V class, IP67, optional IP55−Speeds up to 6000 rpm−High resolution serial encoder, up to 17 bits−Extremely short cycle times for speed and position controller, producing maximum dynamicresponseExample of a system layout for simple motion control application with one CS1.MotionandServos230V classCylindrical design motorsSystems without holding brake (3000 rpm motors)Systems with holding brake (3000 rpm motors)Cube design motorsSystems without holding brake (3000 rpm motors)Systems with holding brake (3000 rpm motors)400V classCylindrical design motorsSystems without holding brake (1500 rpm motors)Systems with holding brake (1500 rpm motors)Systems without holding brake (3000 rpm motors)*Encoder cable for 300 and 650 W motors, R88A–CRWAxxxC–DE MotionandServos400V classSystems with holding brake (3000 rpm motors)*Encoder cable for 300 and 650 W motors, R88A–CRWAxxxC–DE A separate brake cable is not required for 300 and 650 W motors. Systems without holding brake (6000 rpm motors)Systems with holding brake (6000 rpm motors)Cube design motorsSystems without holding brake (3000 rpm motors)Systems with holding brake (3000 rpm motors)**Encoder cable for cube design motors, R88A–CRWAxxxC–DEA separate brake cable is not required for cube design motors.230V classServo driverType codingServomotors 200 VM o t i o n a n d S e r v o s230V classServomotor, rated speed 3000 rpm (cylindrical design)Servomotor, rated speed 3000 rpm (cube design)Motors with absolute encoder and special models are available. Please, contact your local Omron Office.400V classServo driver400V classServo driverType codingServomotors 400 VServomotor, rated speed 1500 rpm (cylindrical design)M o t i o n a n d S e r v o s400V classServomotor, rated speed 1500 rpm (cylindrical design)Servomotor, rated speed 3000 rpm (cylindrical design)400V classServomotor, rated speed 6000 rpm (cylindrical design)Servomotor, rated speed 3000 rpm (cube design)Motors with absolute encoder and special models are available. Please, contact your local Omron Office.MotionandServosfor Positioning ControlOMNUC Wfor Speed/Torque ControlM o t i o n a n d S e r v o sCable and Terminal block connections between OMNUC W Servo drive and te PLC Positioning Control Unit.* 2 Terminal blocks and 2 cables to the PLC are required for the C_W−NC4xx Units (4 axes).Cable and Terminal block connections between OMNUC W Servo drive and the PLC Motion Controller Units*The CS1W−MC421 Unit (4 axes) requires 2 cables.Cable and Terminal block connections between OMNUC W Servo drive and the Advanced Motion Controller Unit C200HW–MC402–EMotionandServosOther accessoriesOther accessoriesMotionandServosOther accessoriesDimensions (mm)Servo driver, 230 VLine filter, footprint, 230 VProgrammingTechnicalDocumentationServomotors, cylindrical design (without brake), 230 VServomotors, cylindrical design (with brake), 230 VServomotors, cube design (without brake), 230 VServomotors, cube design (with brake), 230 VServo driver, 400 VM o t i o na n d S e r v o sLine filter, footprint, 400 VServomotors, 1500 rpm, cylindrical design (without brake), 400 VServomotors, 3000 rpm, cylindrical design (without brake), 400 V*The 300 and 650 W motors have different connectors than shown in the pictureServomotors, 6000 rpm, cylindrical design (without brake), 400 VServomotors, 1500 rpm, cylindrical design (with brake), 400 VServomotors, 3000 rpm, cylindrical design (with brake), 400 V*The 300 and 650 W motors have different connectors than shown in the picture Servomotors, 6000 rpm, cylindrical design (with brake), 400 VServomotors, 3000 rpm, cube design (without brake), 400 VServomotors, 3000 rpm, cube design (with brake), 400 VM o t i o n a n d S e r v o sMotion Control andMotion and Servos − OMNUC W Drive TechnologyThe R88A−MCW151 is a 1.5 axis Motion Controller (MC) Unit that connects directly to the W series Servo Drive. The MC Unit provides direct control of the Servo Drive, enables position/speed and torque control, and offers access to detailed servo drive data.The Multitasking BASIC motion controller language is used to program the MC Unit. A total of up to 14 programs can be stored in the Unit, with up to 3 programs (tasks) running simultaneously. Motion Perfect is the powerful, user−friendly Windows−based software that facilitates highly flexible programming and troubleshooting.The MC Unit offers functionality including axes synchronisation, various fast registration inputs, electronic CAMs, interpolated movements and built−in general purpose inputs/outputs.The R88A−MCW151−DRT−E unit includes also DeviceNet connection, providing high systemintegration.MotionandServosProgramming Accessories, cables etc. Technical DocumentationM o t i o n a n d S e r v o sThe R88A−NCW152 provides both DeviceNet communication functions and the positioning functions of a positioning controller. These functions can be used very easily in conjunction with theW series servo drivers simply by plugging the Option Unit directly into the servo driver.With the NCW152 Unit it is possible to operate up to 63 W series servo drivers as DeviceNet slaves, allowing a widely distributed control and information management system to be created. The remote I/O commands support positioning commands, parameter read / write and the reading of monitor information. The trace function is available with explicit messages, enabling the user to monitor specific operation in detail and perform failure prediction and diagnostics.A large number of positioning functions are available, including zero search, point−to−point positioning, multi−speed, indexing, positioning by table entries and step positioning, feed function, backlash compensation and position−basedoutputs.MotionandServosProgrammingAccessories, cables etc.TechnicalDocumentationThe JUSP−NS500 provides PROFIBUS communications and positioning functionality. These functions can be added to a W−Series Servo Driver simply by mounting the option unit directly to it.With the PROFIBUS option unit it is possible to operate, from a PROFIBUS master, multiple W−Series Servo Drivers connected as PROFIBUS slaves. The commands from the host controller include positioning commands, reading alarm history and canceling commands.A variety of positioning functions are available including origin search, point−to−point positioning, point table and step positioning, feeding function, backslash compensation, and two zone signal outputs.MotionandServosProgrammingAccessories TechnicalDocumentationThe indexer unit JUSP−NS600 is a servo based positioning controller that connects directly to the W−series Servo Drive and provides direct control of the servo drive eliminating the need of an external axis controller.Easy setup and maintenance with the Windows based software tool, the system is configured using a fill−in−the−blank style settings and do not requires a specific language programming.The indexer unit enhances the W−series features with versatilepoint−to−point positioning, conditional profile execution in response to a registration input, definable zone signal outputs, built−in routines and settable positioning condition outputs. Control can be performed using the built−in I/O and via serial network commands.MotionandServos398Motion Control and Drive TechnologyIndexer Option UnitJUSP−NS600ProgrammingAccessoriesTechnicalDocumentation。
Servo-n 操作手册说明书
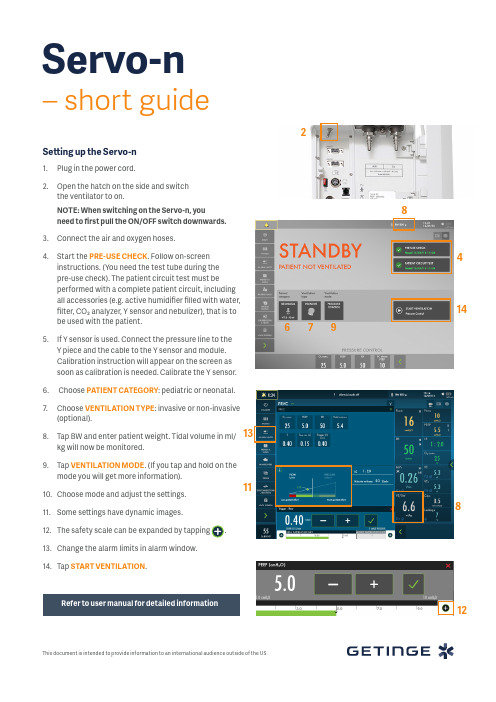
This document is intended to provide information to an international audience outside of the US.67414891112Servo-n– short guideSetting up the Servo-n1.Plug in the power cord.2. Open the hatch on the side and switchthe ventilator to on.NOTE: When switching on the Servo-n, youneed to first pull the ON/OFF switch downwards.3. Connect the air and oxygen hoses.4. Start the PRE-USE CHECK . Follow on-screeninstructions. (You need the test tube during the pre-use check). The patient circuit test must beperformed with a complete patient circuit, including all accessories (e.g. active humidifier filled with water, filter, CO₂ analyzer, Y sensor and nebulizer), that is to be used with the patient.5. If Y sensor is used. Connect the pressure line to theY piece and the cable to the Y sensor and module. Calibration instruction will appear on the screen as soon as calibration is needed. Calibrate the Y sensor.6. Choose PATIENT CATEGORY : pediatric or neonatal. 7. Choose VENTILATION TYPE : invasive or non-invasive(optional). 8. Tap BW and enter patient weight. Tidal volume in ml/kg will now be monitored. 9. Tap VENTILATION MODE . (If you tap and hold on themode you will get more information).10. Choose mode and adjust the settings.11. Some settings have dynamic images.12. The safety scale can be expanded by tapping.13. Change the alarm limits in alarm window.14. Tap START VENTILATION .2138This document is intended to provide information to an international audience outside of the US.Manufacturer · Maquet Critical Care AB · Röntgenvägen 2 SE-171 54 Solna · Sweden · +46 (0)10 335 73 00© M a q u e t C r i t i c a l C a r e A B 2017 · S e r v o -n i s a t r a d e m a r k o f M A Q U E T C r i t i c a l C a r e A B · M X -7427 R e v 01 · E n g l i s hsilence for two minutes by tapping.Current measured valueStop ventilation: tap MANEUVERS: Activate O₂ BOOST is active for one minute. under Maneuvers.Different VIEWS Autoset Alarm limits in controlled modesDirect access barNOTE: Alarms can be in one of three colors depending on priority: High priority Medium priorityLow priority。
东元TSTE交流伺服系统简易手册
警告
y 不可在送電中,實施配線工作。 y 輸入電源切離後,伺服驅動器之狀態顯示 POWER LED 未熄滅前,請勿觸摸電路或更
換零件。 y 伺服驅動器的輸出端 U、V、W,絕不可接到 AC 電源。
! 注意
y 當伺服驅動器安裝於控制盤內,若周溫過高時,請加裝散熱風扇。 y 不可對伺服驅動器作耐壓測試。 y 機械開始運轉前,確認是否可以隨時啟動緊急開關停機。 y 機械開始運轉前,須配合機械來改變使用者參數設定值。未調整到相符的正確設定值,
2-2 I/O 信號端子說明 ................................................................................................................ 83 2-2-1 CN1 控制信號端子說明 ............................................................................................. 84 2-2-2 CN2 編碼器信號端子說明 ......................................................................................... 85
第二章 配線準備
2-1 系統組成及配線 ................................................................................................................. 76 2-1-1 伺服驅動器電源及週邊裝置配線圖.......................................................................... 76 2-1-2 伺服驅動器配線說明.................................................................................................. 77 2-1-3 電線規格...................................................................................................................... 78 2-1-4 馬達端出線.................................................................................................................. 79 2-1-5 馬達及電源標準接線圖.............................................................................................. 81 2-1-6 TB 端子說明 ............................................................................................................... 82 2-1-7 馬達附機械式剎車(BRAKE)接線說明 ..................................................................... 82
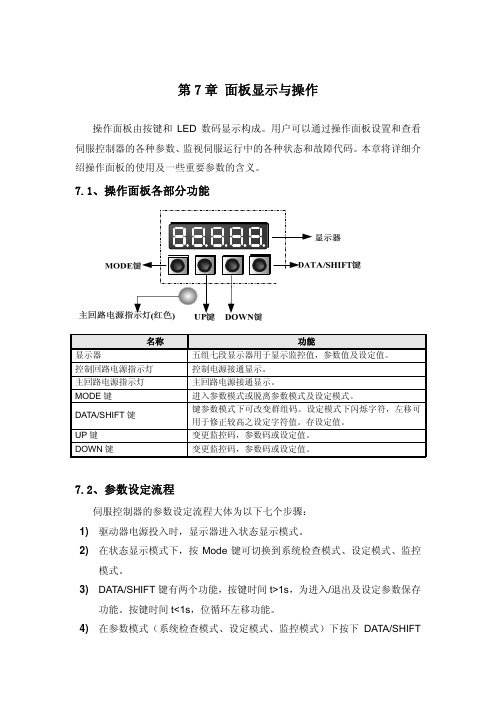
STEP伺服驱动器说明书第七章
正常
异常
说明:正常情况下显示“bb”,表示进入伺服等待状态,此时电机未通电。 当伺服控制器出现异常状况则开机显示故障代码,不同的故障状况对应不 同的故障代码。当相应的故障清除后,需重新上电才能清除故障代码显示 状态。故障代码参见第八章。
在状态显示模式下,显示代码的含义详细描述如下:
ON
(
)
1(
)
(
Un004 电气角
r/min r/min
% 脉冲
度
显示电机的实际转速。 速度控制时,显示速度指令值或内部设定速度。 脉冲串输入控制时显示呈 0。 电流回路指令值作为额定转矩的 100%实现。 将电机原点的脉冲数按编码器分辨率单位显示 (4 倍速换算)。 7 Un008 Un009 Un00A Un00B Un00C Un00D Un00E
DATA/SHIFT 键
UP 键 DOWN 键
功能 五组七段显示器用于显示监控值,参数值及设定值。 控制电源接通显示。 主回路电源接通显示。 进入参数模式或脱离参数模式及设定模式。 键参数模式下可改变群组码。设定模式下闪烁字符,左移可 用于修正较高之设定字符值。存设定值。 变更监控码,参数码或设定值。 变更监控码,参数码或设定值。
)
ON
(
)
(
)
(
)
基本封锁,伺服等待状态(电机未通电) 伺服正在运行中 正转禁止(正转侧超程)状态 反转禁止(反转侧超程)状态 故障代码显示
7.4、监视模式说明(Un参数)
4B
U 参数 监控内容
单位 说明
Un000 Un001
实际的电机速度 输入的速度指令
Un002 内部转矩指令
Un003 自原点的脉冲数
故障报警记录的查阅步骤如下:
servo one操作手册

操作手册
伺服驱动器 2.0 A to 8 A
ServoOne junior 操作手册
ServoOne junior 高性能驱动器
ServoOne junior采用模块化设计,以确保在机械加工过程中发挥其最佳性能集。 无论高速现场总线与中央多轴设备控制器的通讯,还是与伺服驱动器中的分布式可编程 智能运动控制程序通讯,ServoOne junior均能应用自如。
预期用途................................................................................................................. 10 责任........................................................................................................................ 10
公告机构: 识别号: EC型式试验
TüV Rheinland Industrie Service GmbH Am Grauen Stein, 51105 Köln 0035 Certificate No.: 01/205/5036/10
授权编写本技术文件的人员: Matthias Wagner, Gewerbestrasse 5-9, 35633 Lahnau (Germany) CE标志年份: 2010
3.12 编码器接口 ............................................................................................................. 26 3.12.1 旋变(Resolver)接口 X6 ............................................................................. 28 3.12.2 高分辨率编码器接口 X7 .............................................................................. 28 3.13 电机连接................................................................................................................. 29 3.13.1 LSH/LST电机的连接 ................................................................................... 30 3.13.2 接通电机电缆............................................................................................... 31 3.14 制动电阻(RB)....................................................................................................... 31
西门子伺服操作说明书-SINAMICS_V90_OPI
SINAMICS/SIMOTICS SINAMICS V90,SIMOTICS S-1FL6 操作说明Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG 文件订购号: 6SL3298-0AV60-0FP0Ⓟ 09/2013 本公司保留技术更改的权利Copyright © Siemens AG 2013.保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是西门子股份有限公司的注册商标。
本印刷品中的其他符号可能是一些其他商标。
Audin SmartStep servo系统用户手册说明书
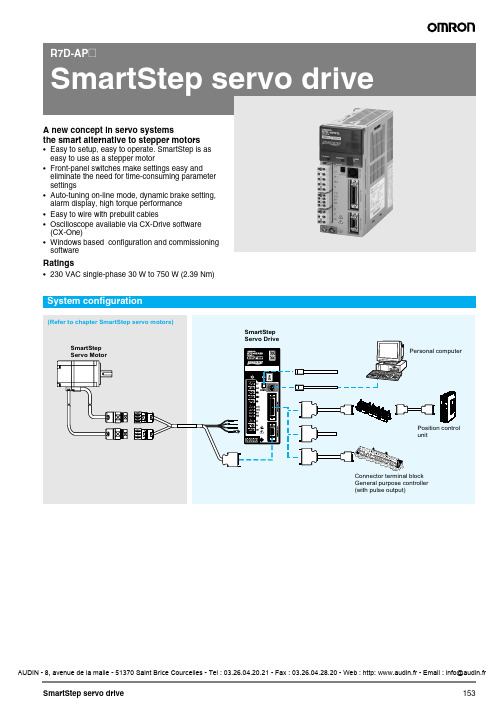
the smart alternative to stepper motors •Easy to setup, easy to operate. SmartStep is as easy to use as a stepper motor•Front-panel switches make settings easy and eliminate the need for time-consuming parameter settings•Auto-tuning on-line mode, dynamic brake setting, alarm display, high torque performance•Easy to wire with prebuilt cables•Oscilloscope available via CX-Drive software (CX-One)•Windows based configuration and commissioning softwareRatings•230 VAC single-phase 30 W to 750 W (2.39 Nm)General specificationsPerformance specificationsI/O specifications Terminal specificationsServo motor FamilyVoltage Models rated torque RemarksR7M-A (3000 min -1)230 V0.095 Nm to 2.39 NmRefer to the SmartStep servo motors chapter for detailsR7M-AP(3000 min -1)230 V 0.318 Nm to 2.39 Nm Refer to the SmartStep servo motors chapter for detailsItemSpecification Ambient operating temperature 0 to 55 °CAmbient operating humidity 90% max. (with no condensation)Ambient storage temperature -20 to 85 °CAmbient storage humidity90% max. (with no condensation)Storage/operating atmosphere No corrosive gases.Vibration resistance 10 to 55 Hz in X, Y, and Z directions with 0.1 mm double amplitude or acceleration of 4.9m/s 2 max., whichever is smallerImpact resistance Acceleration 19.6 m/s 2 max., in X, Y, and Z directions, three times Insulation resistance Between power line terminals and case:0.5 M Ω min. (at 500 VDC)Dielectric strength Between power line terminals and case:1,500 VAC for 1 min at 50/60 Hz Between each control signal and case:500 VAC for 1 min Protective structure Built into panel (IP10).International standardsApproval obtained for UL, cUL, and EN (EMC directiveand low-voltage directive)Item200 VAC input type 30 W 50 W 100 W 200 W 400 W750 WR7D-APA3H R7D-APA5H R7D-AP01H R7D-AP02H R7D-AP04H R7D-AP08H Continuous output current (rms)0.420.60.89 2.0 2.6 4.4Momentary maximum output current (rms) 1.3 1.9 2.8 6.08.013.9Control power supply Single-phase 200/230 VAC (170 to 253 V) 50/60 Hz Main-circuit power supply Single-phase 200/230 VAC (170 to 253 V) 50/60 Hz(three-phase 200/230 VAC can be used with the 750 W model.)Control method All-digital servoSpeed feedback 2,000 pulses/revolution incremental encoder Inverter method PWM method based on IGBT PWM frequency 11.7 kHz Weight0.80.80.80.8 1.1 1.7Compatible motor voltage 200 V Compatible motor capacity 30 W 50 W 100 W 200 W 400 W 750 W Command pulse response 250 kHz Applicable servo motor (R7M-)A03030A05030A10030AP10030A20030AP20030A40030AP40030A75030AP75030Control I/O (CN1) specificationsEncoder connector (CN2) specificationsCommunications connector (CN3) specificationsMonitor output (CN4) specificationsPin SymbolNameFunction1+PULS/CW/A Feed pulses, reverse pulses,or 90° phase difference pulses (A phase)Line-driver input: 7 mA at 3 V Open-collector input Input impedance: 200 ΩMaximum response frequency: 250 kppsPosition control is performed based on the pulses that have been input.2−PULS/CW/A 3+SIGN/CCW/B Direction signal, forward pulses,or 90° phase difference pulses (B phase)4−SIGN/CCW/B 5+ECRST Deviation counter resetLine-driver input: 7 mA at 3 VOpen-collector input: 16 mA at 5 V Input impedance: 200 ΩON: resets deviation counter.6−ECRST 7BKIR Brake interlock outputOutputs holding brake timing signals.8INP Positioning completed output ON when the position error is within the positioning completed range.10OGND Output ground commonGround common for output signals (pins 7 and 8).13+24V +24VDC power input for control Power supply input (+24 VDC) for pins 14 and 18.14RUN RUN command input ON: servo ON (starts power to servo motor)18RESET Alarm reset input ON: servo alarm status is reset.19GND RS-422A groundGround for RS-422A20RXD+RS-422A reception data Interface for RS-422A data transfers21RXD −22TXD+RS-422A transmission data23TXD −24RT Termination resistance terminalConnect to RXD- (pin 21) in the unit at the end of the line.32ZEncoder phase-Z open-collector outputOutput goes ON when the encoder’s phase-Z signal (1 pulse/revolution) is detected.Open-collector output: 20 mA max. at 30 VDC 33ZCOM 34ALMAlarm output Output goes OFF when alarm is detected.Open-collector output: 50 mA max. at 30 VDC 35ALMCOM ShellFGCable shield groundGround for cable's shield wire.Pin Symbol NameFunction1, 2, 3E0V Encoder power supply GND Power supply output for encoder4, 5, 6E5V Encoder power supply +5 V 8S+Encoder + phase-S input Line driver input (conforms to EIA-RS422A)(Input impedance: 220 Ω ± 5%)9S −Encoder − phase-S input 10A+Encoder + phase-A input Line driver input (conforms to EIA-RS422A)(Input impedance: 220 Ω ± 5%)11A −Encoder − phase-A input 12B+Encoder + phase-B input Line driver input (conforms to EIA-RS422A)(Input impedance: 220 Ω ± 5%)13B −Encoder − phase-B input ShellFGCable shield groundGround for cable's shield wire.Pin Symbol NameFunction1/TXD Transmission data Transmission data:RS-232C output Reception data:RS-232C input2/RXD Reception data 3PRMU Unit switching Switching terminal for a parameter unit7+5V +5 V output This is the +5 V power supply output to the parameter unit.8GND GroundShellFGCable shield groundGround for cable's shield wire.Pin Symbol NameFunction1NM Speed monitor Speed monitor output: 1 V per 1,000 r/min 2AM Current monitor Current monitor: 1 V / rated torque 3GND Ground Grounds for monitor output4GNDGroundGeneral specificationsFunction specificationsMode change specificationsItemSpecification Ambient operating temperature 0 to 55 °CAmbient operating humidity 90% max. (with no condensation)Ambient storage temperature -20 to 85 °CAmbient storage humidity90% max. (with no condensation)Storage/operating atmosphere No corrosive gases.Vibration resistance 10 to 55 Hz in X, Y, and Z directions with 0.1 mm double amplitude or acceleration of 9.8m/s 2 max., whichever is smallerImpact resistanceAcceleration 19.6 m/s 2 max., in X, Y, and Z directions, three timesItemFunctionSetting mode Display or change parameter settings.Monitor modeDisplay monitor values.Execute function mode Execute each function mode.Display alarms Display alarms that have occurred.Copy parametersRead or save parameters from the servo drive.Write parameters to the servo drive.Compare parameters in the servo drive with parameters in the parameter unit.Power ONComponentsSwitch operations Gain adjustment switchAdjusts the motor’s responsiveness.When this switch is set to 0, the unit will operate according to the set-tings in the internal parameters (Pn100, Pn101, Pn102, and Pn401).When this switch is set to 1 through F, the unit will operate according to the rotary switch’s setting.Decrease the switch setting to lower the motor’s responsiveness (i.e., so that it moves more smoothly).Increase the switch setting to raise the motor’s responsiveness (i.e., so that it moves faster).Unit number switch Gain adjustment switch DIP switchAutotuning switch• Resolution setting• Command pulse input setting • Dynamic brake settingAlarm indicator Monitor output connector (CN4)Control I/O connector (CN1)Communications connector (CN3)Encoder input connector (CN2)Servo motor power terminalsSetting Position loop gain Speed loop gainSpeed loopintegral constantTorquecommand filter time constant0Enables parameter settings(including settings other than gain settings).115154,000250220203,500200330303,000150440402,000100560601,50070685851,00050712012080030816016060020920020050015A 25025040010B 25025040010C 25025040010D 25025040010E 25025040010F25025040010Enable switch/parameter settingPin 6 of the DIP switch selects whether the servo drive operates according to theDIP switch settings or parameter settings.Online autotuning settingThe autotuning switch selects whether the gain will be adjusted auto-matically during operation.Resolution settingPins 4 and 5 select the positioning resolution.If the resolution is set to 1,000 (the default setting), the motor makesone revolution for every 1,000 pulses input.Command pulse input settingPin 3 selects the command pulse mode. Select “Forward pulse/reversepulse: positive logic” or “feed pulses/direction signal: positive logic.”Dynamic brake settingPin 2 enables or disables dynamic brake operation. If the dynamic brake is ena-bled, the motor can be brought to an emergency stop when the RUN commandgoes OFF or an alarm occurs.Alarm TableNote: 1.These parameters are read when the power is turnedON. Parameter Pn110.2 is valid when online.2.When using a regeneration resistor, set the resistor’scapacity when the temperature has risen to 120°C.Set this parameter to 0 if a regeneration resistor is notbeing used.Pin 6FunctionOFF Enables the DIP switch settings.ON Enables the parameter settings.Pins Resolution54OFF OFF1,000 pulses/revolution(0.36°/step)OFF ON10,000 pulses/revolution(0.036°/step)ON OFF500 pulses/revolution(0.72°/step)ON ON5,000 pulses/revolution(0.072°/step)(Default setting)Perform online autotuning.Complete online autotuning.The result is stored in the inertia ratioparameter (Pn103) and the servo driveruns.(Default setting)Pin 3Command pulse modeOFF Forward pulse/reverse pulse:positive logicON Feed pulses/direction signal:positive logicPin 2Dynamic brake modeOFF Dynamic brake disabled.ON Dynamic brake enabled.(Default setting)(Default setting)Display ALM output Error detection function Display ALM output Error detection functionA.04*OFF Parameter setting error A.7A OFF OverheatA.10*OFF Overcurrent A.bF*OFF System errorA.30OFF Regeneration error A.C1OFF Runaway detectedA.32OFF Regeneration overload A.C2*OFF Phase not detectedA.40OFF Overvoltage/undervoltage A.C3*OFF Encoder disconnect detectedA.51OFF Overspeed A.d0OFF Deviation counter overflowA.70OFF Overload CPF00---Parameter unit transmission error 1A.73OFF Dynamic brake overload CPF01---Parameter unit transmission error 2A.74OFF Inrush resistance overload A.91---Overload warningA.92---Regeneration overload warningServo drivesR7D-APA3H/APA5H/AP01H/AP02H (230 V, 30 to 200 W)R7D-AP04H (230 V, 400 W)R7D-AP08H (230 V, 750 W)FiltersR88A-FIW104-SER88A-FIW107-SE, R88A-FIW115-SEMounting dimensionsMounting dimensions5 dia. holeMounting dimensions5 dia. holeModelR88A-FIW107-SE R88A-FIW115-SE Dimensions in mmA 75 90B 240+5300+5C 50 60D 12 15E11.2Single-phase 200 to 230 VAC +10%/-15% (50/60 Hz)(the 750 W servo drives can input three-phase 200 to 230 VAC.)Connect the shield wire to theconnector shell.Note:*A regeneration resistor can be connected across the B1 and B2 terminals with 400W and 750W servo drives.When using an external regeneration resistor with a 400W servo drive, just connect it across the B1 and B2 terminals.When using an external regeneration resistor with a 750W servo drive, remove the jumper bar from the B2 and B3 terminals and then connect the regeneration resistor across the B1 and B2 terminals.Note:The symbols ABCDE ... show the recommended sequence to select the components in a SmartStep servo systemServo motorsNote:A Refer to the SmartStep servo motor chapter for detailed motor specifications and selection Servo drivesServo motor cables (for CN2)Standard cable (power + encoder)Flexible cables (power + encoder)SymbolSpecifications SmartStep drive model Compatible servo motors A Cylindrical type Flat type C200 VAC30 W R7D-APA3H R7M-A03030-@-50 W R7D-APA5H R7M-A05030-@-100 W R7D-AP01H R7M-A10030-@R7M-AP10030-@200 W R7D-AP02H R7M-A20030-@R7M-AP20030-@400 W R7D-AP04H R7M-A40030-@R7M-AP40030-@750 WR7D-AP08HR7M-A75030-@R7M-AP75030-@Control cables (for CN1)Cable for CN3Cable for CN4FiltersConnectorsExternal regeneration resistorParameter unit & computer softwareSymbolNameCompatible unitsModelAvailable lengths DServo relay unitUse with position control units(doesn’t support communications functions.)Units: CS1W-NC113/133, CJ1W-NC113/133, C200HW-NC113, and C200H-NC112XW2B-20J6-1B (1 axis)---Use with position control units(doesn’t support communications functions.)Units: CS1W-NC213/233/413/433, CJ1W-NC213/233/413/433, C200HW-NC213/413, C500-NC113/211, and C200H-NC211XW2B-40J6-2B (2 axes)Use with position control units(doesn’t support communications functions.)Units: CQM1H-PLB21, and CQM1-CPU43-V1XW2B-20J6-3B (1 axis)Use with position control units (supports communications functions.)Units: CS1W-NC213/233/413/433, CJ1W-NC213/233/413/433XW2B-40J6-4A (2 axes)Use with CJ1M-CPU22/23(doesn’t support communications functions.)XW2B-20J6-8A (1 axis)XW2B-40J6-9A (2 axes)E Cable to servo driveDoesn’t support communications functions. (For the XW2B-@@J6-@B)XW2Z-@@@J-B5 1 m or 2 m(the cable length goes in the empty boxes.)Supports communications functions. (For the XW2B-@@J6-4B)XW2Z-@@@J-B7FCable to position control unitCQM1H-PLB21 and CQM1-CPU43-V1XW2Z-@@@J-A30.5 m or 1 m(the cable length goes in the empty boxes.)C200H-NC112XW2Z-@@@J-A4C200H-NC211 and C500-NC113/211XW2Z-@@@J-A5CS1W-NC113 and C200HW-NC113XW2Z-@@@J-A8CS1W-NC213/413 and C200HW-NC213/413XW2Z-@@@J-A9CS1W-NC133XW2Z-@@@J-A12CS1W-NC233/433XW2Z-@@@J-A13CJ1W-NC113XW2Z-@@@J-A16CJ1W-NC213/413XW2Z-@@@J-A17CJ1W-NC133XW2Z-@@@J-A20CS1W-NC233/433XW2Z-@@@J-A21CJ1M-CPU22/23XW2Z-@@@J-A26G Control cableFor general-purpose controllersR88A-CPU @@@S 1 m or 2 m(the cable length goes in the empty boxes.)HConnector terminal block cableFor general-purpose controllers R88A-CTU @@@N Connector terminal blockXW2B-40F5-P---SymbolNameModelI Computer monitor cableR7A-CCA002P2SymbolNameModelJAnalog monitor cable R88A-CMW001SSymbolApplicable servo driveFilter model Rated current Rated voltageKR7D-APA3H, R7D-APA5H, R7D-AP01H, R7D-AP02H R88A-FIW104-E 4A 250 VAC single phaseR7D-AP04H R88A-FIW107-E 7A R7D-AP08H R88A-FIW115-E 15ASpecificationsModelControl I/O connector (for CN1)R88A-CNU01C SmartStep connectors kit.Models included in kit R7A-CNA00K-DESmartStep encoder connector (for CN2) R7A-CNA01RHypertac power connector female SPOC-06K-FSDN169Hypertac encoder connector femaleSPOC-17H-FRON169Hypertac power connector male (used in the motor)SRUC-06J-MSCN236Hypertac encoder connector male (used in the motor)SRUC-17G-MRWN087Specification Model220 W, 47 ΩR88A-RR22047SSpecificationsModelParameter copy unit (with cable)R7A-PR02A Configuration and monitoring software tool for servo drives and inverters. (CX-drive version 1.11 or higher)CX-drive Complete OMRON software package including CX-drive. (CX-One version 1.1 or higher)CX-OneIn the interest of product improvement, specifications are subject to change without notice.ALL DIMENSIONS SHOWN ARE IN MILLIMETERS.To convert millimeters into inches, multiply by 0.03937. T o convert grams into ounces, multiply by 0.03527.Cat. No. I46E-EN-01。
费斯托伺服手册01_SEC AC_wmemoc_orignal

SI-T
Seite 12
SEC AC & WMEMOC
通过I/O进行目标位置选择
• 4 个输入通过二进制编码方式可以进行 16个位置的选择 • 所有位置参数都可在WMEMOC中进行 设定
SI-T
Seite 13
SEC AC & WMEMOC
伺服控制器的设定
WMEMOC
SI-T
Seite 1
SEC AC & WMEMOC
WMEMOC
安装WMEMOC软件 到计算机 启动WMEMOC
启动WMEMOC时,软件自 动处于Online状态,如果 计算机与伺服控制器之间 的通讯电缆没有连接则会 提示出错。
SI-T
Seite 2
SEC AC & WMEMOC
WMEMOC
配置16个位置寄存器
选择所要进 行设置的目 标位置寄存 器: 比如:Pos0
SI-T
Seite 16
SEC AC & WMEMOC
WMEMOC
配置16个位置寄存器
设定目标位置 例如:目标位置150mm DGE-45-ZR 不带减速箱 进给常数为100
目标为:150/100=1.5
SEC AC & WMEMOC
WMEMOC
通过I/O进行目标位置选择
请确认以下选项已经选择
Selector A或Selector B中只要有一个选中此项即可
SI-T Seite 14
SEC AC & WMEMOC
WMEMOC
配置16个位置寄存器
通过菜单选择
工具栏上的快捷按钮
TXM24 RS232 485集成式步进伺服电机硬件手册说明书

TXM24 RS232/485集成式步进伺服电机硬件手册上海安浦鸣志自动化设备有限公司目录1 产品介绍 (3)1.1 特性 (3)1.2 功能框图 (4)1.3 安全须知 (5)2 开始前的准备 (6)2.1 安装上位机软件 (6)2.2 安装电机 (6)2.3 选择合适的电源 (7)2.3.1 选择电源电压 (7)2.3.2 再生放电钳 (7)2.3.3 选择电源电流 (8)3 安装及接线 (10)3.1 连接电源 (10)3.2 通信接线 (11)3.2.1 RS-232的通信接线 (11)3.2.2 RS-485的通信接线 (12)3.3 输入与输出 (14)3.3.1 连接端口框图 (14)3.3.2 STEP & DIR 高速数字输入 (15)3.3.3 EN 数字输入 (16)3.3.4 模拟量输入 (17)3.3.5 可编程输出 (18)4 错误代码 (19)5 参考资料 (20)5.1 力矩曲线 (20)5.2 机械尺寸 (21)5.3 技术规格 (22)5.4 附件 (22)6 联系 MOONS’ (23)1 产品介绍感谢您选择使用鸣志的TXM24系列集成式步进电机。
TXM24系列集成式步进伺服电机在集成式电机中完美融入了伺服控制技术,革命性地创造出具有全新优异性能表现的一体化运动控制终端。
1.1 特性•可编程、集成式步进伺服电机•工作电压直流12-70V•控制方式:力矩模式* 模拟量控制* SCL指令控制速度模式* 数字量控制* 模拟量调速控制* SCL指令控制(点动运行)位置模式* 脉冲控制•脉冲&方向•CW/CCW•A/B 正交相位脉冲(编码器跟随)* 模拟量位置控制* SCL指令控制•Q Programming(仅Q版本)可编程独立运行•通信方式:RS-232 或者 RS-485•编码器分辨率:20000脉冲/圈•输出力矩TXM24S/Q-3□G:最大2.4 N•m 连续运行(3.0 N•m 短时运行)•I/O:3路光电隔离的数字信号输入,频率带宽可调,接收5-24V直流电平1路光电隔离的数字信号输出,最大 30V/100 mA1路0-5V的模拟量输入•技术亮点全伺服控制,高定位精度,高速高响应,节能高效,多控制模式大力矩,平滑低噪声,结构紧凑•整机通过IP65防水防尘认证(RS232 版本有3个M12连接器,RS485 版本有4个M12连接器)1.2 功能框图TXM24S/QSTEP (5 to 24 volts)StepCW stepA quadrature (encoder following) CW limitCW jogStart/stop (oscillator mode) General purpose input DIR (5 to 24 volts)DirectionCCW stepB quadrature (encoder following)CCW limitCCW jogDirection (oscillator mode)General purpose inputEN (5 to 24 volts)EnableAlarm/fault resetSpeed 1/speed 2 (oscillator mode)General purpose inputI/O ConfigurationsOUT (30V, 100mA)FaultMotionTachIn positionBrakeGeneral purpose programmable1.3 安全须知本产品的运输、安装、使用或维修必须由具备专业资格并熟悉以上操作的人员进行。
method server Quick Installation Guide (cnB5).pdf麥

麥法迪 伺服器簡易設定手冊目錄目錄 (2)1.概述 (3)2.登入管理者網頁 (4)3. 建立帳戶 (6)4.刪除帳戶 (14)5. 建立電子郵件帳戶 (20)6.刪除電子郵件帳戶 (28)7. 加裝印表機 (31)8. 更改密碼 (33)9.電郵至傳真 (以網頁電郵登錄) (37)10. 列印至傳真 (39)11.完 (59)1.概述在開始設定麥法迪 伺服器前,請先檢查伺服器的安裝情況及準備以下資料, 以便閣下進行相關安裝情序。
✧你的麥法迪 伺服器已完成安裝 包括域名注冊、外置防火牆 (網域路由器) 及電郵伺服器。
✧你要設定的電腦是應用微軟視窗98/Me/2000/XP平台。
✧管理者帳戶名稱✧管理者帳戶密碼麥法迪 伺服器簡易安裝手冊包括八種一般設定指引:✧登入管理者網頁✧建立帳戶✧刪除帳戶✧建立電子郵件帳戶✧刪除電子郵件帳戶✧加裝印表機✧更改密碼✧電郵至傳真麥法迪 伺服器一般設定包括兩部分: 第一部分是麥法迪 伺服器,第二部分是用戶電腦。
請參照簡易設定手冊內容,設定你的伺服器和電腦。
2.登入管理者網頁1.首先, 開啟網頁瀏海程式 (例如-IE), 在 網址欄輸入伺服器預設的 IP 位置(例如 -預設IP :192.168.0.253:10000)後,並按 鍵盤 Enter鍵。
2.之後,會有 “安全性警告” 訊息出現(這是一般正常的情況), 請按 是 作確定。
3.然後請輸入管理者用帳戶名稱及密碼。
4.請 按 登入 鍵 登入至管理者網頁。
3. 建立帳戶包括兩個重要部分的設定 – 伺服器 (第一部分) 及 用戶個人電腦 (第二部分)第一部分. 伺服器設定 – 建立帳戶1. 登入麥法迪伺服器管理者網頁,輸入用戶名稱 admin 及密碼 password。
2. 選擇 系統 分頁,再按 用戶及團體 圖3.請選擇 及 按 建立新帳戶4. 然後輸入 帳戶名稱,真正名稱, 並選定項目 預設加密密碼 及 輸入密碼。
SERVOSTAR S300 Quickstart Guide

SERVO STAR®S300 Quickstart Guide Version12/2010Keep all manuals as aproduct component duringthe life span of the product.Pass all manuals to futureusers/owners of the product.PreparationThe CD-ROM delivered with the servo amplifier contains all the manuals in PDF for-mat and the setup software.Insert the CD-ROM into your PC.Autostart function activated:A window with the start screen opens.Autostart function deactivated:Click START(task bar),then on Run.Enterx:\index.htm or x:\autorun.exe(x=CD drive letter).Click OK.The start screen opens.Install Setup SoftwareMultilanguage CD-ROM:On the start screen you find a link to the setup software: Install Setup Software S300/S700Release_.__Build__Click it and follow the instructions from here.North American CD-ROM:Click the product name,then select Install Software from the next screen.Follow the instructions from here.DocumentsYou need Acrobat Reader to read the PDFs(installation link on every screen). Multilanguage CD-ROM:Select the language version on the start screen of theCD-ROM.Click"Servo Drives"in the column"Technical Manuals".A table with links to all manuals appears.North American CD-ROM:Click on any manual title automatically brings up the document.Mechanical and Electrical Installation of the Servo Amplifier1.Unpack servo amplifier and accessories2.Keep the Instructions Manual ready(print if necessary),check HW-Revision3.Observe safety instructions in the manuals4.Mount the servo amplifier as described in the Instructions Manual5.Wire the servo amplifier as described in the Instructions Manual or apply the mini-mum wiring for drive test(see next page)2Minimum Wiring for Drive Operation3PowerON24V DC +-Enable PowerMotor-FeedbackMotor-Power Motor1212123545X8X4X324V ON R E S E N C P C C A N This wiring does not fulfill any requirements to safety or functio-nality of your appli-cation,it just shows the requi-red wiring for drivetesting withoutload.Connectl Connect the interface cable to a serial interface on your PC and to the serial in-terface X6of the servo B to serial converter can be used optionally. l Switch on the24V logic power supply for the servo amplifier.l Wait about30the front display of the servo amplifier displays thecurrent rating(e.g.for3amps).If the supply voltage isswitched on,too,a leading P is displayed(e.g.for Power,3amps).If a fault code()or a warning()or a status message("."or"_" or"E"or"S")appears in the display,you will find the description and hints for trouble shooting in the Instructions Manual.If there is fault,fix the problem.Double-Click the DriveGUI.exe icon on your Windows desktop to startthe software.You can work offline or online withDriveGUI.exe.Work ONLINE now.If the communication is started for thefirst time,you have to setup the com-munication parameters.Choose the communication systemand the interface,where the servoamplifier is connected to.Click OK.4The software tries to communicate with the drive and to upload the parameters.If it's not successful,you receive this error message:Frequent causes:-wrong interface chosen-wrong connector chosen at the servo amplifier-interface is used by another software-24V auxiliary voltage for the servo amplifier not working-interface cable broken or wrong wiringClick OK to remove the error message.The software starts in the offline mode now, that requires the manual selection of the amplifier's type.Quit this selection by clo-sing the window.Fix the communication problem.Restart the software in Online mode.If communication works,you see the start screen.Make sure,that theamplifier is disabled(Input Enable con-nector X3pin12must be0V oropen)!Select"Setup Wizard"in the navigation frame.5Important Screen ElementsHelp FunctionThe Online-Help gives detailed information to all parameters the servo amplifier can work with.Key F1Starts Online Help for the actual screen page.Menu bar Help Starts Online Help with the first page.Context Help.Click the help symbol first.Then click the functionfor which you need help.Tool BarOperation Mode,use Digital Velocity mode fordrive testing.Status BarThe status bar shows a green Online symbol,indicating that the communication works.6Setup WizardThe Setup Wizard leads you through the necessary steps for configuring your servo amplifier.Depending on the selected application,only the active screen pages are necessary.For a quick setup select the setup type"Quick Motor/Drive Setup".Start the Wizard.7Basic SetupMains voltage:Select the nominal mains AC voltageResponse to Loss of Input Phase:Select Single-Phase or Three-Phase operation. With three-phase operation you can select either warning"n05"or error"F19"in case of phase loss.The setting"F19"disables the output stage,"n05"is just a message. Name:You can enter a name for the servo amplifier(up to8characters).This simpli-fies the drive identification in the system.Set Software Enable on Bootup:Don't select this option for the quick test.Click NEXT.8Units/MechanicalThe user units for all input fields in the setup software can be preselected here. Position,Velocity,AccelerationSelect usable units for your application referring to the moved load.Mechanical ConversionThe relationship between motor shaft revolution(pole pair pitch with linear motors) and motion distance of the load is specified here.Gear ratio can be calculated here as well.Detailed information can be found in the online e the calculation tool based on sample applications for calculating the resolution value(press"Calculate PGEARI/PGEARO..."button).Select the application and enter the required values. Click"Calculate Conversion Factors..."button.Resolution is calculated now.Click NEXT.9Motor(rotary)/Feedback-linear motor see next pageSimplified setting of the motor related parameters.Feedback:Select the feedback type used in the motor.Attention:Resolver is fixed to2pole in the Quick Motor/Drive Setup.Change"pole n°"on feedback screen in Complete Setup later,if required.Motor type:Click the button"Select from Database...".Open the database file (mdb___.csv)and select the used motor.Special motors must be defined in the "Complete Setup".Brake:If the amplifier shall control a brake,change the Brake parameter to"With" Calculated quick tuning:If you know the load-to-motor inertia ratio(0is for no load), enter this number here and select the desired servo performance.If you don't know the inertia ratio,select"Do not tune".Click FINISH.10Motor(linear)/Feedback-rotary motor see previous pageSimplified setting of the motor related parameters.Feedback:Select the feedback system used.Motor type:Click the button"Select from Database...".Open the database file (mdb___.csv)and select the used motor out of the list.Special motors must be defi-ned in the"Complete Setup".Encoder Lines(appears with Feedback Type Sine Encoder): Click"Calculate"and fill in the Encoder signal period.Brake:If the motor has a built-in brake,change the Brake parameter to"With" Calculated quick tuning:If you know the load-to-motor inertia ratio(0is for no load), enter this number here and select the desired servo performance.If you don't know the inertia ratio,select"Do not tune".Click FINISH.11Save Parameters and RestartYou are going to finish the Setup Wizard and you have changed several basic para-meters.Depending on the parameters you changed,two possible reactions will occure now:Configuration parameters changedA warning appears,that you have to restart the amplifier,this is called"coldstart".Click"YES".The parameters are saved to the amplifier's EEPROM automatically and a reset command restarts the amplifier(takes a few seconds).Other parameters changedNo warning appears.Save the to the EEPROM of the servo amplifiermanually by clicking the in the tool bar.A coldstart of the amplifier is not necessary.Select the screen"Motion Service"in the navigation frame.12Motion Service(Jog Mode)Be aware that the actual position of the load permits the subsequent moving operations.The axis could move to the hardware limit-switch or the mechanical stop.Make sure that a jerk or a fast acceleration of the load cannot cause any damage.l Switch on the power supply for the drive.l STO-Enable:Apply+24V to the input STO-Enable[X4/5]l Hardware-Enable:Apply+24V to the input Enable[X3/12].is missed or the sequence was wrong,the front display shows.l Software-Enable:Click the symbolbar.Now,the front display shows an E and the current rating(e.g.for Enable,3amps).Click the symbol to switch off the output stage(disable).Jog(Digital Velocity Mode):You can move the drive withconstant speed.Enter a safespeed.Observe the"safe reducedspeed"requirements for yourapplication!The drive moves with the presetspeed when the+or–button ispressed.It stops when the but-ton is released.Actual errors and warnings are listed on the screen Status.A description oferrors/warnings can be found in the online help.Now you have setup and tested the basic functions of the drive successfully.13ENDISAdditional Setup ScreensObserve the safety instructions in the manuals when you change parameters in the additional setup screens.For all setup functions detailed information can be found in the Online Help system and the integrated command reference.Select"Complete Setup"in theSetup-Wizard.Now you have access to:l Feedback:Adjust the used feedback unitl Motor:Adjust the used motorl Control Loops:Current-,Velocity-and Position-Loops can be optimizedl Position Data:Adjust the position control for the requirements of your applicati-on.l Position Registers:up to16position values in the motion way can be monito-red.l Electronic Gearing:If the servo amplifier will follow a setpoint as a slave with a gear ratio,you can select the gearing source here and define the gear ratio.l Encoder Emulation:select the encoder emulation(position output)l Analog I/O:setup the analog inputsl Digital I/O:setup the digital inputs and outputsl Status:displays amplifiers data with history,actual faults and warningsl Monitor:displays the drive data(actual values)l Homing:definition and start of homingl Motion task:definition and start of motion taskl Oscilloscope:4channel oscilloscope with multiple functionalityl Bode Plot:tool for optimizing the drivel Terminal:setup the servo amplifier with ASCII commandsl Autotuning:fast velocity loop optimizing14MonitorSelect the screen"Monitor"from thenavigation frame.The Monitor screen shows all importantactual electrical and mechanical valu-es.DocumentsYou need access to these documents(located on the product CD-ROM,you can download the latest editions from our website):l Instructions Manual(Assembly,Installation,Setup)l CANopen communication profileDepending on the installed expansion card,you need one of these documents:l PROFIBUS DP communication profilel DeviceNet communication profilel SERCOS communication profilel EtherCAT communication profileYou need Acrobat Reader to read the PDFs,an installation link is on every screen of the product CD-ROM.15Technical changes which improve the performance of the equipment may be made without prior notice!All rights reserved.No part of this work may be reproduced in any form(by photoco-pying,microfilm or any other method)or stored,processed,copied or distributed by electronic means without the written permission of Kollmorgen Europe GmbH. Kollmorgen Customer Support-North AmericaE-Mail**********************Tel.:+1-540-633-3545Fax:+1-540-639-4162Kollmorgen Customer Support-EuropeE-Mail**********************Tel.:+49(0)2102-9394-0Fax:+49(0)2102-9394-3110。
TXM34Q C 快速安装指南说明书
TXM
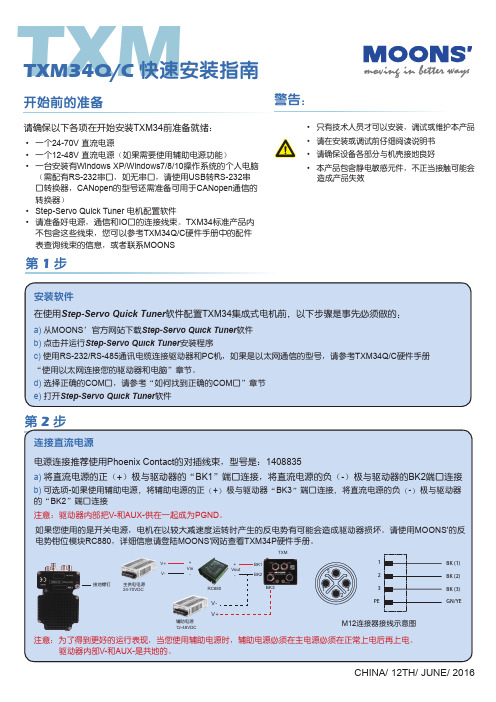
TXM34Q/C 快速安装指南
开始前的准备请确保以下各项在开始安装TXM34前准备就绪:
• 一个24-70V 直流电源
• 一个12-48V 直流电源(如果需要使用辅助电源功能)
• 一台安装有Windows XP/Windows7/8/10操作系统的个人电脑(需配有RS-232串口,如无串口,请使用USB 转RS-232串口转换器,CANopen 的型号还需准备可用于CANopen 通信的转换器)
• Step-Servo Quick Tuner 电机配置软件
• 请准备好电源,通信和IO 口的连接线束。
TXM34标准产品内不包含这些线束,您可以参考TXM34Q/C 硬件手册中的配件表查询线束的信息,或者联系
MOONS
第 1 步
警告:
• 只有技术人员才可以安装,调试或维护本产品• 请在安装或调试前仔细阅读说明书• 请确保设备各部分与机壳接地良好
• 本产品包含静电敏感元件,不正当接触可能会 造成产品失效
RC880
TXM
BK3
主供电电源辅助电源BK2
BK1Vout
通讯接线
推荐使用以下Phoenix 连接器型号
第 3 步
a
b
d
c
4
3
5
BN 1
2BK 4
WH 3
4
5
1
2
如何找到正确的COM 口
图1图2图3
如果您对我们的产品有什么建议或需要我们的帮助,请垂询+86-4008209661,或访问 。
上海市闵行区闵北工业区鸣嘉路168 号
电话:************
传真:************TXM34Q/C 快速安装指南。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014-12-31 增加 Step-Servo Quick Tuner 3.0 的新特性
2
Step-Servo Quick Tuner 软件手册
2பைடு நூலகம்目录
1 版本历史 ........................................................................................................................ 2 2 目录................................................................................................................................ 3 3 Step-Servo Quick Tuner 软件介绍 ............................................................................... 6 3.1 3.2 4.1 Step-Servo Quick Tuner 软件总览....................................................................... 6 主界面 ................................................................................................................. 7 菜单栏 ................................................................................................................. 9 4.1.1 工程 ........................................................................................................ 10 4.1.2 配置 ........................................................................................................ 10 4.1.3 Q 编程..................................................................................................... 11 4.1.4 连接 ........................................................................................................ 11 4.1.5 Ping ........................................................................................................ 11 4.1.6 IP 地址表 ................................................................................................ 11 4.1.7 选项 ........................................................................................................ 12 4.1.8 恢复出厂设置 .......................................................................................... 14 4.1.9 报警历史 ................................................................................................. 15 4.1.10 工具 ........................................................................................................ 15 4.1.11 语言 ........................................................................................................ 17 4.2 工具栏 ............................................................................................................... 17 4.2.1 驱动器型号.............................................................................................. 17 4.2.2 通讯端口 ................................................................................................. 17 4.2.3 伺服状态、清除报警 ............................................................................... 18 4.2.4 上传与下载.............................................................................................. 18 4.2.5 停止 ........................................................................................................ 19 5 第 1 步:配置 ............................................................................................................... 19 5.1 电机配置 ............................................................................................................ 19 5.1.1 电流设置 ................................................................................................. 20 5.1.2 速度限值 ................................................................................................. 20 5.1.3 加速度限值.............................................................................................. 20 5.2 5.3 控制模式选择 ..................................................................................................... 21 控制模式设置 ..................................................................................................... 21 5.3.1 位置模式 Position (I/O Controlled) .......................................................... 21 5.3.2 速度模式 Velocity (I/O Controlled) .......................................................... 23 5.3.3 SCL/Q(Stream Command/Stand Alone)模式 ..................................... 25
Step-Servo Quick Tuner 软件手册
V1.1
©版权所有 上海安浦鸣志自动化设备有限公司
Step-Servo Quick Tuner 软件手册
1 版本历史
版本 1.0 1.1 作者 Austin Jay Frank, Jimmy 参与者 日期 2013-7-19 更改内容 首次发布
4 用 Step-Servo Quick Tuner 软件连接驱动器 ................................................................ 8
3
Step-Servo Quick Tuner 软件手册 5.3.4 Modbus 模式 .......................................................................................... 26 5.3.5 力矩模式 Torque ..................................................................................... 27