指令设定一览表
G指令M指令一览表
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ M 指令一览表 ~~~~~~~~~~~~~~~~~~~~~~~~~
M00 程式停止(暂停) M01 程式选择性停止/选择性套用 M02 程序结束 M03 主轴正转 M04 主轴反转 M05 主轴停止 M06 自动刀具交换 M07 吹气启动 M08 切削液启动 M09 切削液关闭 M10 吹气关闭 →M09也能关吹气 M11《斗笠式》主轴夹刀 M12 主轴松刀 M13 主轴正转+切削液启动 M14 主轴反转+切削液启动 M15 主轴停止+切削液关闭 M16— M18没有 M19 主轴定位 M20 —— 没有 M21 X轴镜象启动 M22 Y轴镜象启动 M82 工作台上 M83 工作台下 M84 工作台伸出
M88 —— M97 没有 M98 调用子程序 M99 子程序结束
G82 固定循环(钻孔/计数式搪 孔) G83 固定循环(深钻孔) G84 固定循环(攻牙) G85 固定循环(搪孔) G86 固定循环(搪孔) G87 固定循环(反搪孔) G88 固定循环(搪孔) G89 固定循环(搪孔) G90 绝对值指令 G91 增量值指令 G92 机械坐标系设定 G93 逆时间进给 G114.1 主轴同期制御
M23 镜象取消 M24 第四轴镜象启动 M25 第四轴夹紧 M26 第四轴松开 M27 分度盘功能 M28 没有 M29 刚性攻牙 M30 程式结束/自动断电 M31 —— M47 没有 M48 深钻孔启动 M49 —— M51 没有 M52 刀库右移 M53 刀库左移 M54 —— M69 没有 M70 自动刀具建立 M71 刀套向下 M72 换刀臂60° M73 主轴松刀 M74 换刀臂180° M75 主轴夹刀 M76 换刀臂0° M77 刀臂向上 M78 —— M80 没有 M81 工作台交换确认
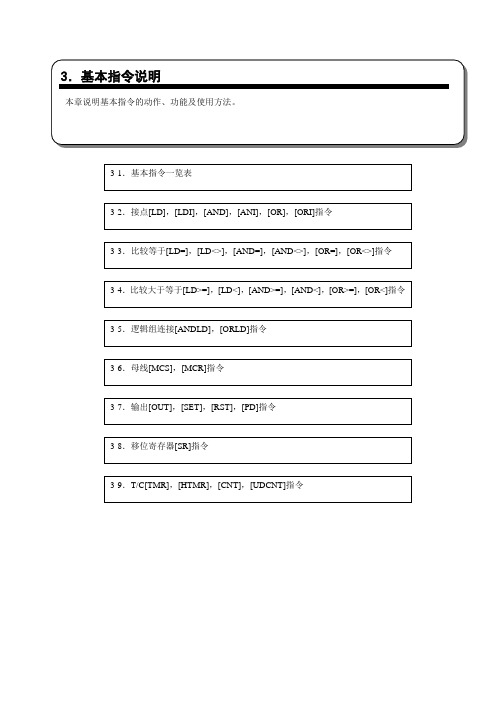
PLC指令
FC系列可编程控制器的基本指令如下:Array1、2表示操作数LDIX0 与母线连接OUT Y0 LD X1 OUTM1 驱动指令OUTY3LDX0AND X3 串联接点OUT Y0 AND X1OUTY1● 直接连到母线上时使用,或者在一个接点组开始时使用。
● LD 表示常开接点,LDI 表示常闭接点。
● OUT 指令是对输出继电器、内部继电器的线圈驱动指令,对输入线圈只能作中间接点使用。
●并列的OUT 命令能多次使用。
●用AND ,ANI 指令串联连接1个接点。
在逻辑运算开始接点后面,串联连接的接点使用此指令。
在线圈驱动指令后面,串联连接在该线圈驱动指令前面的回路上的接点也使用此指令。
●AND 表示常开接点,ANI 表示常闭接点。
●用OR,ORI指令并联连接1个接点。
如果有两个以上的接点串联连接,并将这种串联回路块与其他回路并联连接时,采用后面的ORLD指令。
●OR,ORI是指该指令与前面的LD、LDI指令进行并联连接。
●OR表示常开接点,ORI表示常闭接点。
LD= W10K10OUT M30LD<> W201 W200OUT M111 如果寄存器W10的数据和常数10相等,则条件成立,M30接通。
2 如果寄存器W201的数据与寄存器W200的数据不等,则条件成立,M11接通。
LD X0AND= W20 K10AND<> W100 W101OUT Y2当X0接通时,如果寄存器W20的数据等于10且寄存器W100的数据与W101的数据不等,则条件成立,Y2接通。
●LD=,LD<>指令用于将比较等于接点连接到母线上或其他分支接点处。
●LD=指令是指被比较数据等于比较数据时,接点接通;被比较数据不等于比较数据时,接点断开。
LD<>是指被比较数据等于比较数据时,接点断开;比较数据不等于比较数据时,接点接通。
回路表示●用AND=,AND<>指令可串联一个比较等于接点。
三菱FX系列PLC功能指令一览表概要
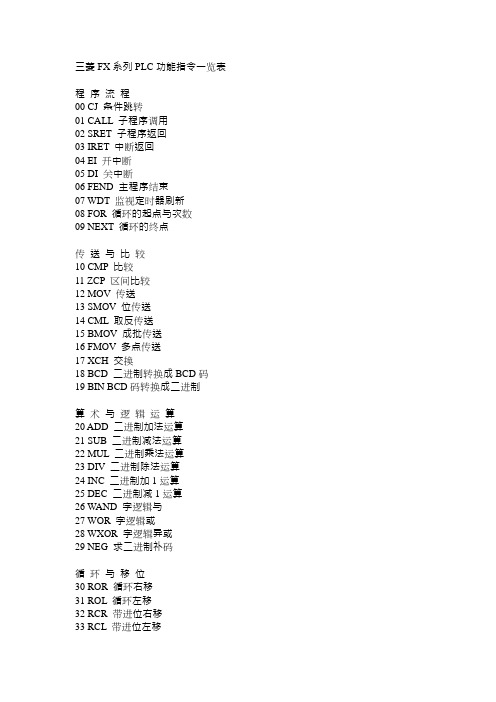
三菱FX系列PLC功能指令一览表程序流程00 CJ 条件跳转01 CALL 子程序调用02 SRET 子程序返回03 IRET 中断返回04 EI 开中断05 DI 关中断06 FEND 主程序结束07 WDT 监视定时器刷新08 FOR 循环的起点与次数09 NEXT 循环的终点传送与比较10 CMP 比较11 ZCP 区间比较12 MOV 传送13 SMOV 位传送14 CML 取反传送15 BMOV 成批传送16 FMOV 多点传送17 XCH 交换18 BCD 二进制转换成BCD码19 BIN BCD码转换成二进制算术与逻辑运算20 ADD 二进制加法运算21 SUB 二进制减法运算22 MUL 二进制乘法运算23 DIV 二进制除法运算24 INC 二进制加1运算25 DEC 二进制减1运算26 WAND 字逻辑与27 WOR 字逻辑或28 WXOR 字逻辑异或29 NEG 求二进制补码循环与移位30 ROR 循环右移31 ROL 循环左移32 RCR 带进位右移33 RCL 带进位左移34 SFTR 位右移35 SFTL 位左移36 WSFR 字右移37 WSFL 字左移38 SFWR FIFO(先入先出)写入39 SFRD FIFO(先入先出)读出数据处理40 ZRST 区间复位41 DECO 解码42 ENCO 编码43 SUM 统计ON位数44 BON 查询位某状态45 MEAN 求平均值46 ANS 报警器置位47 ANR 报警器复位48 SQR 求平方根49 FLT 整数与浮点数转换高速处理50 REF 输入输出刷新51 REFF 输入滤波时间调整52 MTR 矩阵输入53 HSCS 比较置位(高速计数用)54 HSCR 比较复位(高速计数用)55 HSZ 区间比较(高速计数用)56 SPD 脉冲密度57 PLSY 指定频率脉冲输出58 PWM 脉宽调制输出59 PLSR 带加减速脉冲输出方便指令60 IST 状态初始化61 SER 数据查找62 ABSD 凸轮控制(绝对式)63 INCD 凸轮控制(增量式)64 TTMR 示教定时器65 STMR 特殊定时器66 ALT 交替输出67 RAMP 斜波信号68 ROTC 旋转工作台控制69 SORT 列表数据排序外部I/O 设备70 TKY 10键输入71 HKY 16键输入72 DSW BCD数字开关输入73 SEGD 七段码译码74 SEGL 七段码分时显示75 ARWS 方向开关76 ASC ASCI码转换77 PR ASCI码打印输出78 FROM BFM读出79 TO BFM写入外围设备80 RS 串行数据传送81 PRUN 八进制位传送(#)82 ASCI 16进制数转换成ASCI码83 HEX ASCI码转换成16进制数84 CCD 校验85 VRRD 电位器变量输入86 VRSC 电位器变量区间87 - -88 PID PID运算89 - -浮点数运算110 ECMP 二进制浮点数比较111 EZCP 二进制浮点数区间比较118 EBCD 二进制浮点数→十进制浮点数119 EBIN 十进制浮点数→二进制浮点数120 EADD 二进制浮点数加法121 EUSB 二进制浮点数减法122 EMUL 二进制浮点数乘法123 EDIV 二进制浮点数除法127 ESQR 二进制浮点数开平方129 INT 二进制浮点数→二进制整数130 SIN 二进制浮点数Sin运算131 COS 二进制浮点数Cos运算132 TAN 二进制浮点数Tan运算147 SWAP 高低字节交换定位155 ABS ABS当前值读取156 ZRN 原点回归157 PLSY 可变速的脉冲输出158 DRVI 相对位置控制159 DRV A 绝对位置控制时钟运算160 TCMP 时钟数据比较161 TZCP 时钟数据区间比较162 TADD 时钟数据加法163 TSUB 时钟数据减法166 TRD 时钟数据读出167 TWR 时钟数据写入169 HOUR 计时仪外围设备170 GRY 二进制数→格雷码171 GBIN 格雷码→二进制数176 RD3A 模拟量模块(FX0N-3A)读出177 WR3A 模拟量模块(FX0N-3A)写入触点比较224 LD= (S1)= (S2)时起始触点接通225 LD> (S1)> (S2)时起始触点接通226 LD< (S1)< (S2)时起始触点接通228 LD<> (S1)<> (S2)时起始触点接通229 LD≦(S1)≦(S2)时起始触点接通230 LD≧(S1)≧(S2)时起始触点接通232 AND= (S1)= (S2)时串联触点接通233 AND> (S1)> (S2)时串联触点接通234 AND< (S1)< (S2)时串联触点接通236 AND<> (S1)<> (S2)时串联触点接通237 AND≦(S1)≦(S2)时串联触点接通238 AND≧(S1)≧(S2)时串联触点接通240 OR= (S1)= (S2)时并联触点接通241 OR> (S1)> (S2)时并联触点接通242 OR< (S1)< (S2)时并联触点接通244 OR<> (S1)<> (S2)时并联触点接通245 OR≦(S1)≦(S2)时并联触点接通246 OR≧(S1)≧(S2)时并联触点接通三菱FX系列PLC功能指令的数据格式1.位元件与字元件象X、Y、M、S等只处理ON/OFF信息的软元件称为位元件;而象T、C、D等处理数值的软元件则称为字元件,一个字元件由16位二进制数组成。
FX2N功能指令一览表

附录1 FX2N软元件一览表软元件地址的分配如下。
在基本单元上连接输入输出扩展设备和特殊单元的输入继电器与输出继电器的地址号,请在各自产品的手册中予以确认。
【】内的软元件为有电池后备的软元件附注:1、非后备软元件。
利用参数设定,可变为后备软元件。
2、后备软元件。
利用参数设定,可变为非后备软元件。
3、后备固定软元件。
不可改变软元件特性。
附录2 FX2N系列可编程控制器主要技术指标FX2N系列可编程控制器的技术指标包括一般技术指标、电源技术指标、输入技术指标、输出技术指标和性能技术指标,分别如表2-1至表2-5所示。
表2-3 FX输入技术指标注输入端X0~X17内有数字滤波器,其响应时间可由程序调整为0~60ms。
表2-4 FX输出技术指标①响应时间0.2ms是在条件为24V/200mA时,实际所需时间为电路切断负载电流为0的时间,可用并接续流二级管的方法改善响应时间。
大电流时为0.4mA以下。
表2-5 FX功能技术指标①非后备锂电池保持区。
通过参数设置,可改为后备锂电池保持区。
②由后备锂电池保持区保持,通过参数设置,可改为非后备锂电池保持区。
③由后备锂电池固定保持区固定,该区域特性不可改变。
附录3 FX2N系列可编程控制器应用指令总表续表续表续表续表续表注表中D命令栏中有“0”的表示可以是32位的指令;P命令栏中有“0”的表示可以是脉冲执行型的指令。
上表中,表示各操作数可用元件类型的范围符号是:B、B´、W1、W2、W3、W4、W1´、W2´、W3´、W4´、W1"、W4",其表示的范围如图D1所示。
(a) (b)图D1 操作数可用元件类型的范围符号(a) 位元件;(b) 字元件。
G指令M指令一览表
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~G 指令一览表~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~G41.1法线制御左 有效G00 快速定位G42.1法线制御右 有效G01 直线补间切削G43 刀具长设定(+)G02 圆弧补间切削CW(顺时针)G44 刀具长设定(—)G03 圆弧补间切削CCW(逆时针)G43.1第1主轴制御有效G02.3指数函数补间正转G44.1第2主轴制御有效G03.3指数函数补间逆转G45 刀具位置设定(扩张)G04 暂停G46 刀具位置设定(缩小)G05 高速高精度制御 1G47 刀具位置设定(二倍)G05.1高速高精度制御 2G48 刀具位置设定(减半)G06~G08没有G47.12主轴同时制御有效G07.1/107 圆筒补间G49 刀具长设定取消G09 正确停止检查G50 比例缩放取消G10 程式参数输入/补正输入G51 比例缩放有效G11 程式参数输入取消G50.1G指令镜象 取消G12 整圆切削CWG51.1G指令镜象 有效G13 整圆切削CCWG52 局部坐标系设定G12.1/112 极坐标补间有效G53 机械坐标系选择G13.1/113 极坐标补间取消G54 工件坐标系选择1G14没有G55 工件坐标系选择2G15 极坐标指令取消G56 工件坐标系选择3G16 极坐标指令有效G57 工件坐标系选择4G17 平面选择X-YG58 工件坐标系选择5G18 平面选择Y-ZG59 工件坐标系选择6G19 平面选择X-ZG54.1工件坐标系选择扩张48组G20 英制指令G60 单方向定位G21 公制指令G61 正确停止检查模式G22-G26没有G61.1高精度制御G27 参考原点检查G62 自动转角进给率调整G28 参考原点复归G63 攻牙模式G29 开始点复归G63.1同期攻牙模式(正攻牙)G30 第2~4参考点复归G63.2同期攻牙模式(逆攻牙)G30.1复归刀具位置1G64 切削模式G30.2复归刀具位置2G65 使用者巨集单一呼叫G30.3复归刀具位置3G66 使用者巨集状态呼叫AG30.4复归刀具位置4G66.1使用者巨集 状态呼叫B G30.5复归刀具位置5G67 使用者巨集状态呼叫取消G30.6复归刀具位置6G68 坐标回转有效G31 跳跃机能G69 坐标回转取消G31.1跳跃机能1用者固定循环G31.2跳跃机能2G71 使用者固定循环G31.3跳跃机能3G72 使用者固定循环G32没有G73 固定循环(步进循环)G33 螺纹切削G74 固定循环(反向攻牙)G34 特别固定循环(圆周孔循环)G75 使用者固定循环G35 特别固定循环(角度直线孔循环)G76 固定循环(精搪孔)G36 特别固定循环(圆弧)用者固定循环G37 自动刀具长测定G78 使用者固定循环G37.1特别固定循环(棋盘孔循环)G79 使用者固定循环G38 刀具径补正向量指定G80 固定循环取消G39 刀具径补正转角圆弧补正G81 固定循环(钻孔/铅孔)G40 刀具径补正取消G82 固定循环(钻孔/计数式搪孔)G41 刀具径补正左G83 固定循环(深钻孔)具径补正右G84 固定循环(攻牙)G40.1法线制御取消G85 固定循环(搪孔)G41.1法线制御左 有效G86 固定循环(搪孔)G42.1法线制御右 有效G87 固定循环(反搪孔)G43 刀具长设定(+)G88 固定循环(搪孔)G44 刀具长设定(—)G89 固定循环(搪孔)G94 非同期进给(每分进给)G90 绝对值指令期进给(每回转进给)G91 增量值指令G96 周速一定制御 有效G92 机械坐标系设定G97周速一定至于取消G93 逆时间进给G98 固定循环起始点复归G99 固定循环R点复归G114.1主轴同期制御~~~~~~~~ ~~~~~~~~ ~~~~~~~~ ~~~~~~ M 指令一览表~~~~~~~~ ~~~~~~~~ ~~~~~~~~ ~~~~~~~~ ~~~~~~ M00程式停止(暂停) M01程式选择性停止/选择性套用M02程序结束M03主轴正转 M04主轴反转 M05主轴停止 M06自动刀具交换M07吹气启动 M08切削液启动M09 切削液关闭 M10吹气关闭→M09也能关吹气 M11《斗笠式》主轴夹刀M12主轴松刀 M13主轴正转+切削液启动M14主轴反转+切削液启动M15主轴停止+切削液关闭M16—M18没有 M19主轴定位 M20 —— 没有M21 X 轴镜象启动M22 Y 轴镜象启动M23镜象取消M24第四轴镜象启动M25第四轴夹紧M26第四轴松开M27分度盘功能M28没有M29刚性攻牙 M30程式结束/自动断电M31 —— M47没有M48深钻孔启动M49 —— M51没有M52刀库右移 M53刀库左移 M54 —— M69没有M70自动刀具建立M71刀套向下 M72换刀臂60°主轴松刀 M74换刀臂180°M75主轴夹刀 M76换刀臂0°M77刀臂向上 M78 —— M80没有M81工作台交换确认工作台上 M83工作台下 M84工作台伸出M85工作台缩回M86工作台门开M87工作台门关M88 —— M97没有M98调用子程序M99子程序结束。
永宏PLC应用指令一览表.docx
FAtan
浮点数反正切函数运算
(Floating PointarctangentFunction,
tan-1)
比较指令
17
CMP
数值比较(Compare)
37
ZNCMP
区域比较(Zone Compare)
170
=
相等比较指令
171
>
大于比较指令
172
<
小于比较指令
173
<>
不相等比较指令
174
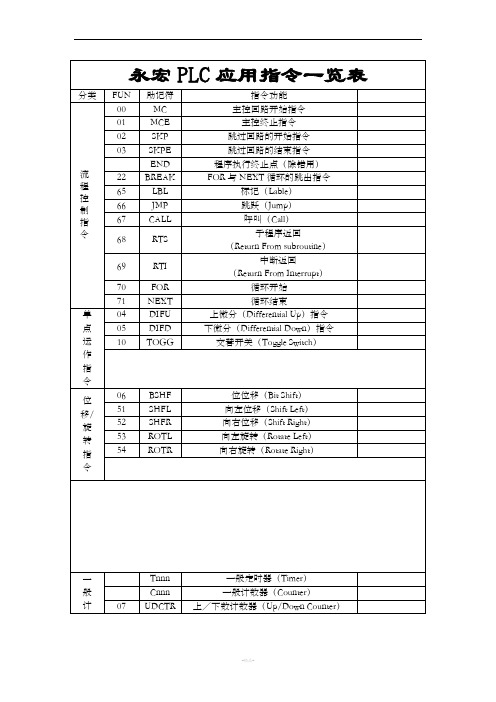
永宏PLC应用指令一览表
分类
FUN
助记符
指令功能
流程控制指令
00
MC
主控回路开始指令
01
MCE
主控终止指令
02
SKP
跳过回路的开始指令
03
SKPE
跳过回路的结束指令
END
程序执行终止点(除错用)
22
BREAK
FOR与NEXT循环的跳出指令
65
LBL
标记(Lable)
66
JMP
跳跃(Jump)
67
CALL
127
MBWR
矩阵位写入(Matrix Bit Write)
128
MBSHF
矩阵位位移(Matrix Bit Shift)
129
MBROT
矩阵位旋转(Matrix Bit Rotate)
130
MBCNT
矩阵位状态数量计算
(Matrix Bit Status Count)
NC定位控制指令
140
HSPSO
32
ADCNV
4~20mA 模拟量输入读值转换指令
FX2n PLC应用指令一览表

类别功能号指令助记符功 能D指令P指令程0CJ条件跳转-O 序1CALL调用子程序-O 流2SRET子程序返回--程3EI 开中断(中断允许指令)--4DI 关中断(中断禁止指令)--5IRET中断返回--6FEND主程序结束--7WDT监视定时器-O8FOR循环区开始--9NEXT循环区结束--传10CMP比较O O 送11ZCP区间比较O O 与12MOV传送O O比13SMOV数位传送-O 较14CML取反传送O O 15BMOV成批传送-O16FMOV多点传送O O17XCH数据交换O O18BCD求BCD码O O19BIN求二进制码O O 四20ADD二进制加法O O则21SUB二进制减法O O 运22MUL二进制乘法O O 算23DIV二进制除法O O与24INC 加一指令(二进制)O O逻25DEC 减一指令(二进制)O O辑26WADN逻辑字与O O 运27WOR逻辑字或O O 算28WXOR逻辑字与或O O 29NEG求补码O O循30ROR循环右移O O 环31ROL循环左移O O 与32RCR带进位循环右移O O 转33RCL带进位循环左移O O 移34SFTR位右移-O 35SFTL位左移-O36WSFR字右移-O37WSFL字左移-O38SFWR移位写入-O39SFRD移位读出-O 数40ZRST区间复位-O 据41DECO解码(译码)-O 处42ENCO编码-O 理43SUM求置ON位的总和O O 44BON ON位判断O O45MEAN平均值O O46ANS信号报警设置--47ANR信号报警复位-O 48SOR二进制平方根O O49FLT 二进制整数与浮点数转换O O高50REF输入/输出刷新-O 速51REFE滤波调整正-O 处52MTR矩阵输入--理53HSCS 比较置位(高速计数器)O-54HSCR 比较复位(高速计数器)O-55HSZ 区间比较(高速计数器)O-编写格式操作数*********S1=比较值1的数据或储存地址;S2=比较值2的数据或储存地址;D=比较结果ON/OFF位元件的首址,占用3个点。
三垦变频器参数设定一览表

常用基本设定值:
指令码编号CD
功能名称
用户数据设定及内容
最小设定单位
出厂设定
001
运转指令选择
2.外部端子
1
1
007
上限频率
50 Hz
0.01 Hz
60
012
启动延时时间
2秒
0.1秒
0
013
制动方式
3.空转停止
1
1
029
1速频率
30
0.01 Hz
0
055
增益频率(VRF1)
P100
延长加减速时间
除去短路与接地障碍
向购买商店咨询
oCn
恒速中的过电流
oCd
减速中的过电流
oCPA
加速中短时间过载
是否急剧加速:
电流限制值:Cd043是否过大?
延长加速时间
减小设定值
oCPn
恒速中短时间过载
负载是否急剧变化(增加):
电流限制值:Cd043是否过大?
消除急剧变化(增加)
减小设定值
oCPd
减速中短时间过载
措施
AL1
存储器异常
断开电源,待充电灯CHARGE 熄灭以后,再接通电源,对报警进行确认
请向购买的商店咨询
AL2
系统异常
外部噪音是否过大
信号线距离动力线是否过近
安装电涌吸收装置和静噪滤波器将信号线与动力线分开
AL3
系统异常
AL4
系统异常
是否发生电容的急剧放电?
断开电源,待充电灯CHARGE熄灭以后再接通电源,对报警进行确认
1
0
161
使用电机的设定·M1
DSP指令一览表
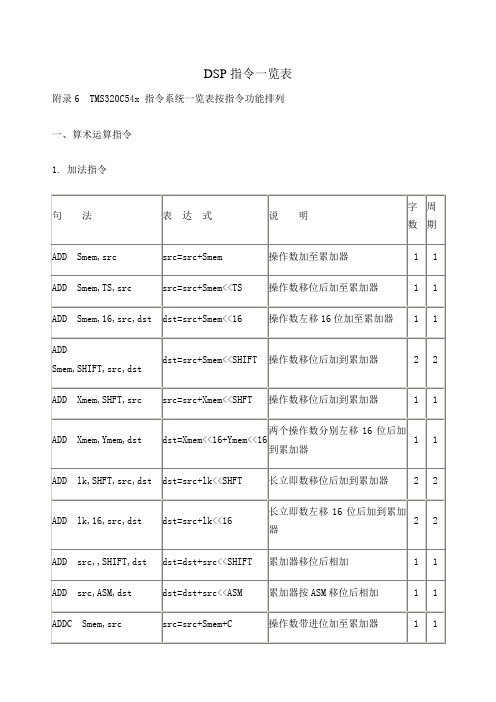
DSP指令一览表附录6 TMS320C54x 指令系统一览表按指令功能排列
一、算术运算指令
1. 加法指令
2. 减法指令
3. 乘法指令
4. 乘法累加/减指令
5. 双精度32位操作数指令
6. 专用指令
二、逻辑运算指令
1. 与逻辑运算指令
2. 或逻辑运算指令
3. 异或逻辑运算指令
4. 移位指令
5. 测试指令
三、程序控制指令
1. 分支转换指令
2. 调用指令
注:条件“真”,§条件“假”,※延迟指令;
3. 中断指令
4. 返回指令
注:条件“真”,§条件“假”,※延迟指令;
5. 重复指令
注:条件“真”,§条件“假”,※延迟指令;
6. 堆栈管理指令
7. 其他程序控制指令
注:条件“真”,§条件“假”,※延迟指令;
四、加载和存储指令
1. 加载指令
2. 存储指令
3. 条件存储指令
4. 并行加载和存储指令
5. 并行加载和乘法指令
6. 并行存储和加 / 减法指令
7. 并行存储和乘法指令
8. 其他加载和存储指令。
PLC基本指令一览表

第一节根本指令的种类根本指令一览表:根本指令 . 步进梯形图指令FX1S可编程序控制器的根本顺控指令和步进梯形图指令的种类及其功能以下所示:助记符功能格式和操作软元件LD常开触点逻辑运算初步( 常开触点与取左母线连结 )LDI常闭触点逻辑运算初步( 常闭触点与取反左母线连结〕LDP上升沿检测 ( 检测到信号的上升沿时取脉冲闭合一个扫描周期 )上升沿LDF下降沿检测 ( 检测到信号的下降沿时取脉冲闭合一个扫描周期 )下降沿AND串通连结 ( 常开触点与其他触点或触与点组串通连结 )ANI串通连结 ( 常闭触点与其他触点或触与非点组串通连结 )ANDP上升沿串通连结 ( 检测到位软元件上与脉冲升沿信号时闭合一个扫描周期 )上升沿ANDF下降沿串通连结 ( 检测到位软元件下与脉冲降沿信号时闭合一个扫描周期 )下降沿OR并联连结 ( 常开触点与其他触点或触或点组并联连结 )ORI并联连结 ( 常闭触点与其他触点或触或非点组并联连结 )ORP脉冲上升沿检测并联连结( 检测到位或脉冲软元件上升沿信号时闭合一个扫描上升沿周期 )ORF脉冲下降沿检测并联连结( 检测到位或脉冲软元件下降沿信号时闭合一个扫描下降沿周期 )ANB并联电路块的串通连结( 电路块与其电路块与他触点或触点组串通连结)ORB串通电路块的并联连结( 电路块与其电路块或他触点或触点组并联连结)OUT线圈驱动输出SET使线圈接通并保持动作置 1RST使线圈断开 , 除掉动作保持 , 存放器复零清零PLS上升沿微分输出 ( 当检测到输入脉冲上升沿的上升沿时 , 指令的操作元件闭合一脉冲个扫描周期 )PLF下降沿微分输出 ( 当检测到输入脉冲下降沿的下降沿时 , 指令的操作元件闭合一脉冲个扫描周期 )MC公共串通接点的连结( 将左母线临时主控指令移到一个所需地址, 产生一临时左母线 , 形成主控电路块 )MCR公共串通接点的除掉( 取消临时左母主控复位线 , 将左母线返回到原来的地址, 结束主控电路块 )MPS进栈 ( 将逻辑运算结果存入栈储藏进栈指令器 , 储藏器中原来的储藏结果依次向栈储藏器基层推移 )MRD读栈 ( 将储藏器一号单元的内容读读栈指令出 , 且詹储藏器中的内容不发生变化 )MPP出栈 9 将储藏器中一号单元的结果出栈指令取出 , 储藏器中其他单元的数据依次向上推移 )INV运算结果取反取反NOP无动作空操作END输入输出办理以及返回到 0 步结束STL步进接点开始 ( 将步进接点接到左母步进接点线 )RET步进接点开始 ( 使副母线返回到原来步进结束的左母线地址 )第二节根本指令介绍FX1S的根本指令形式、功能和编程方法。
西门子plc指令一览表

指令
描述
STL
字节至整数 BTI
双整数至整数 DTI
字符串至整数 STI
自然对数运算 LN
自然指数运算 EXP
PID运算
PID
指令
描述
STL
整数相加
+I
双整数相加
+D
整数相乘得双 整数
MUL
整
数
运
整数相乘
*I
算
指
令
双整数相乘
*D
字节递增
INCB
字递增
INCW
双字递增
INCD
指令
描述 开放中断 禁止中断 中断有条件返回
STL ENI DISI RETI
中
断
连接中断
ATCH
SWAP
字节传送立即 读
BIR
指令
描述
STL
FOR…NEXT循环 FOR
程 序
跳转
JMP
控
制
装载SCR
LSCR
指
令
SBR有条件返回 CRET
看门狗复位
WDR
诊断LED
DLED
指令
描述
STL
字节左移
SLB
双字左移
SLD
字节右移
SRB
移
双字右移
SRD
移
位
指
字节循环左移 RLB
令
双字循环左移 RLD
字节循环右移 RRB
数控车床指令字符一览表-文档资料

代码 模态 功能说明 代码
M00 非模态 程序停止 M03
M02 非模态 程序结束 M04
M30
非模态
程序结束并返 回程序起点
M05 M07
M98 非模态 调用子程序 M08
M99 非模态 子程序结束 M09
模态 功能说明 模态 主轴正转起动 模态 主轴反转起动 模态 主轴停止转动 模态 切削液打开 模态 切削液打开 模态 切削液停止
2次 3次 3次 4次
0.4 0.16
0.6 0.3 0.11
0.6
0.6
0.5
0.5
0.14
0.3
0.13
0.6 0.6 0.4 0.21
量 5次
•.
•5
6次
备注 ▲ ▲ ▲ ▲
▲ ▲
▲ ▲ ▲ ▲ ▲ ▲ ▲ ▲ ▲ ▲ ▲
•2
准备功能一览表(二)
G 代码 组 G65 00 G71 G72 G73 G76 06 G80 G81 G82 G90 13 G91 G92 00 G94 14 G95 G96 16 G97
功能 宏指令简单调用 外径/内径车削复合循环指令 端面车削复合循环指令 闭环车削复合循环指令 螺纹切削复合循环指令 外径/内径车削固定循环指令 端面车削固定循环指令 螺纹切削固定循环指令 绝对值编程指令 相对值编程指令 工件坐标系设定 每分钟进给速度 每转进给速度
恒线速度切削
参数(后续地址字) P,A~Z
X,Z,U,W,C,P Q,R,E
X,Z,I,K,C,P R,E
X,Z
S S
备注: ⑴ 00 组中的 G 代码是非模态的,其他•.组的 G 代码是模态的; ⑵ ▲ 标记者为缺省值。
三垦变频器参数设定一览表

减小设定值
\
oCPn
恒速中短时间过载
负载是否急剧变化(增加):
电流限制值:Cd043是否过大
消除急剧变化(增加)
减小设定值
oCPd
减速中短时间过载
是否以大GD2急剧减速:
电流限制值:Cd043是否过大
}
延长减速时间
减小设定值
oLA
加速中过载
电机是否过载使用
电子热敏器的设定是否正确
负载的GD2是否过大
CnEr
%
恒速中防止过载报警
dCEr
减速中防止过载报警
ES
外部热敏器报警
电机是否过热
;
减小负载
oH
散热片温度异常
风扇是否停止
周围温度是否过高
检查风扇工作状态
增加换气量
LuA
加速中欠压
电源电压条件是否良好
&
电压是否过低
输入是否缺相
调查并改善电源条件
Lun
恒速中欠压
LUd
减速中欠压
oCH
主开关器件温度异常
分 (即6秒)
分
5
175
压力指令 Pref
(根据需求设定)0] Nhomakorabea177
模拟反馈增益压力Pg
1(代表压力表)
MPa
P0
178
上限压力值 Ph
MPa
MPa
1
:
179
上限压力值 Pl
MPa
MPa
0
}
三垦变频器故障代码一览表
变频器警报代码一览表:
报警编号
报警代码
内容
报警编号
报警代码
内容
01
G码指令一览表

G17 设定X-Y工作平面 G82 孔底暂停钻孔循环 M19 主轴定位使主轴停止
G59 工作坐标系统设定
G61 确实停止检测
G64 切削模式
G65 单一宏程序呼叫
G66 模式宏程序呼叫
G67 模式宏程序呼叫取消
G30 任意参考点回归 G87 背面精细搪孔循环
G31 跳跃指令 G88 半自动精细搪孔循环
G33 螺牙切削 G89 孔底暂停搪孔循环
G40 刀具半径补偿消除 G90 绝对位置输入方式
G28 参考点回归 ห้องสมุดไป่ตู้ G85 搪孔循环 M98 呼叫子程序
G29 从参考点回归 G86 高速搪孔循环 M99 子程序返回主程序
G09 确实停止检测 G74 左手攻牙循环 M05 主轴停止
G10 可程序数据输入 G76 精细搪孔循环 M06 刀具交换
G15 极坐标插位取消 G80 取消循环 M08 加工液开启
G51.1 镜象有效 G134 圆周孔循环
G52 局部坐标系统设定 G135 角度直线孔循环
G53 机械坐标系统设定 G136 圆弧孔循环
G54 工作坐标系统设定 G137.1 棋盘孔循环
G02 圆弧补间(顺时钟) G70 英制单位加工 M02 程序终了
G03 圆弧补间(逆时钟) G71 公制单位加工 M03 主轴启动顺时钟
G04 暂停指定时间 G73 高速啄式钻孔循环 M04 主轴启动逆时钟
G49 刀具长度补偿取消 G96 等表面切削速度
G50 放大缩小开始 G97 等表面切削速度取消
G51 放大缩小取消 G98 复归到初始点
永宏-指令一览表
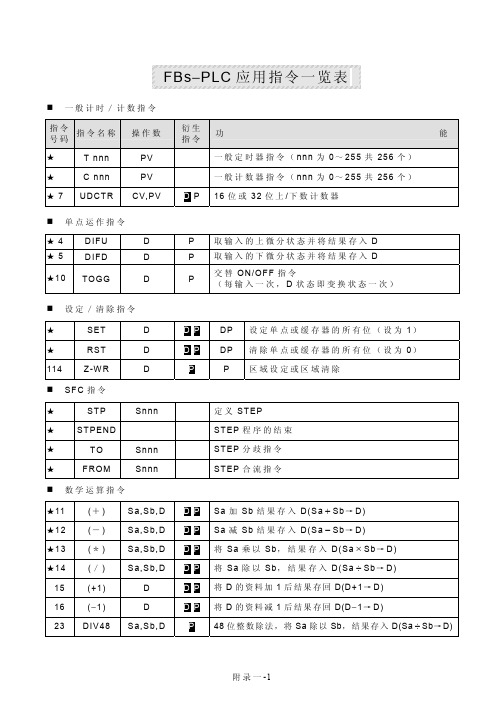
指令 指令名称 号码 0 1 2 3 MC MCE SKP SKPE END 22 65 66 67 68 69 70 71 BREAK LBL JMP CALL RT S RT I FOR NEXT I/O 指 令 74 76 77 78 79 80 81 82 83 84 IMDIO TKEY HKEY D SW
8 9 40 41 42 43 44 45 46 47 48 49 50
搬移指令 MOV MOV/ BITRD BITW R BITMV NBMV BYMV XCHG SW A P UNIT DIST BUNIT BDIST RW - F R W R- M P RD-MP S,D S,D S,N D,N S,Ns,D,Nd S,Ns,D,Nd S,Ns,D,Nd Da,Db D S,N,D S,N,D S,N,D S,N,D S a , S b , P r, L S,BK,Os,Pr , L ,W R B K , O s , P r, L ,D D P D P D P D P D P D P D P D P P P P P P D P P P 将 S 数 据 搬 移 至 D(S→ D) 将 S 数 据 倒 相 后 搬 移 至 D(S→ D) 把 S 中 N 所 指 位 的 状 态 取 出 送 到 FO0 去 把 INB 输 入 的 状 态 写 入 D 中 N 所 指 的 位 把 S 中 的 Ns 位 状 态 搬 至 D 中 的 Nd 位 处 把 S 中 Ns 指 定 位 数 (Nibble)搬 至 D 中 Nd 所 指 定 的 位 数 把 S 中 N s 指 定 的 Byte 搬 至 D 中 N d 所 指 定 的 Byte 把 Da 和 Db 的 内 容 值 互 换 把 D 中 的 High-Byte 和 Low-Byte 的 内 容 值 互 换 把 S 开 始 的 连 续 N 个 Word 的 位 数 0 ( N B 0 ) 取 出 依 序 串联后存入 D 把 S 的 位 数 0(NB0)开 始 的 连 续 N 个 位 数 , 存 放 于 D 开 始 的 N 个 Word 的 位 数 0 去 S 的 N 个低字节取出结合存入 D S 的字节分配至 D 的 N 个低字节 读 /写 档 案 缓 存 器 指 令 写 入 数 据 至 MEMORY PACK 指 令 从 MEMORY PACK 读 取 数 据 指 令
G代码一览表

G代码一览表在数控加工领域,G 代码是控制机床运动和功能的重要指令。
对于从事数控编程和操作的人员来说,熟悉 G 代码是必不可少的。
下面为您详细介绍常见的 G 代码及其功能。
G00 快速定位G00 指令使机床以最快的速度移动到指定的位置。
它不进行切削加工,只是用于快速定位刀具,比如将刀具从一个位置快速移动到另一个位置,为后续的切削加工做准备。
G01 直线插补G01 指令用于控制机床沿着直线进行切削加工。
在程序中,需要指定直线的终点坐标以及进给速度,机床就会按照指定的速度沿着直线移动并进行切削。
G02 顺时针圆弧插补当需要加工顺时针方向的圆弧时,就会用到 G02 指令。
除了指定圆弧的终点坐标外,还需要给出圆弧的半径或者圆心坐标,以及切削的进给速度。
G03 逆时针圆弧插补与 G02 相反,G03 指令用于加工逆时针方向的圆弧。
同样需要提供相应的坐标和参数来精确控制圆弧的加工。
G04 暂停G04 指令可以让机床在执行程序时暂停一段时间。
这在某些需要进行短暂停留的加工过程中非常有用,比如让刀具在某处停留一段时间以保证加工质量。
G17 XY 平面选择在数控加工中,通常需要指定加工所在的平面。
G17 指令选择 XY 平面作为加工平面。
G18 XZ 平面选择当需要在 XZ 平面进行加工时,使用 G18 指令进行选择。
G19 YZ 平面选择而 G19 指令则用于选择 YZ 平面作为加工平面。
G20 英制输入G20 指令用于将输入的尺寸单位设置为英制。
G21 公制输入与之相反,G21 指令将尺寸单位设置为公制。
G28 返回参考点G28 指令使机床的坐标轴快速移动回到预先设定的参考点位置,以确保机床的位置精度和重复定位精度。
G30 返回第二参考点除了主要的参考点,有些机床还设置了第二参考点,G30 指令用于使坐标轴移动到第二参考点。
G40 刀具半径补偿取消在使用刀具半径补偿功能后,需要通过 G40 指令来取消补偿,以恢复刀具的实际路径。
单片机汇编语言指令一览表
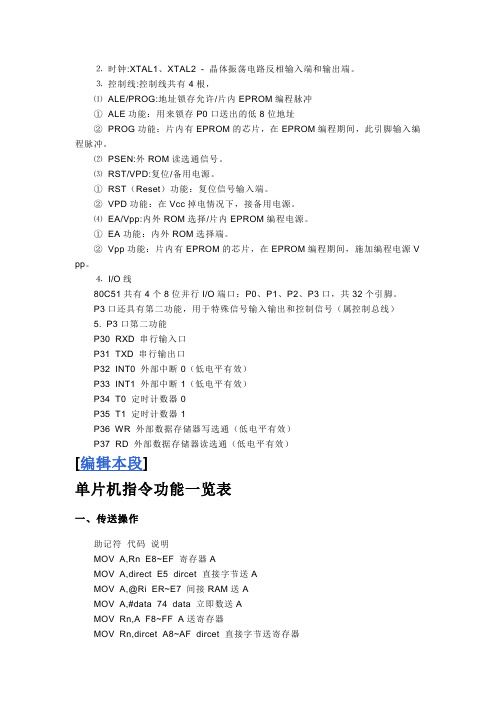
⒉时钟:XTAL1、XTAL2 - 晶体振荡电路反相输入端和输出端。
⒊控制线:控制线共有4根,⑴ALE/PROG:地址锁存允许/片内EPROM编程脉冲①ALE功能:用来锁存P0口送出的低8位地址②PROG功能:片内有EPROM的芯片,在EPROM编程期间,此引脚输入编程脉冲。
⑵PSEN:外ROM读选通信号。
⑶RST/VPD:复位/备用电源。
①RST(Reset)功能:复位信号输入端。
②VPD功能:在Vcc掉电情况下,接备用电源。
⑷EA/Vpp:内外ROM选择/片内EPROM编程电源。
①EA功能:内外ROM选择端。
②Vpp功能:片内有EPROM的芯片,在EPROM编程期间,施加编程电源V pp。
⒋I/O线80C51共有4个8位并行I/O端口:P0、P1、P2、P3口,共32个引脚。
P3口还具有第二功能,用于特殊信号输入输出和控制信号(属控制总线)5. P3口第二功能P30 RXD 串行输入口P31 TXD 串行输出口P32 INT0 外部中断0(低电平有效)P33 INT1 外部中断1(低电平有效)P34 T0 定时计数器0P35 T1 定时计数器1P36 WR 外部数据存储器写选通(低电平有效)P37 RD 外部数据存储器读选通(低电平有效)[编辑本段]单片机指令功能一览表一、传送操作助记符代码说明MOV A,Rn E8~EF 寄存器AMOV A,direct E5 dircet 直接字节送AMOV A,@Ri ER~E7 间接RAM送AMOV A,#data 74 data 立即数送AMOV Rn,A F8~FF A送寄存器MOV Rn,dircet A8~AF dircet 直接字节送寄存器MOV Rn,#data 78~7F data 立即数送寄存器MOV dircet,A F5 dircet A送直接字节MOV dircet,Rn 88~8F dircet 寄存器送直接字节MOV dircet1,dircet2 85 dircet1 dircet2 直接字节送直接字节MOV dircet,@Ro 86~87 间接RAM送直接字节MOV dircet,#data 75 dircet data 立即数送直接字节MOV @Ri,A F6~F7 A送间接RAMMOV @Ri,#data 76~77 data 直接字节送间接RAMMOV @Ri,#data 76~77 data 立即数送间接RAMMOV DPTR,#data16 90 data 15~8 16位常数送数据指针data7~0MOVC A,@A+DPTR 93 由((A)+(DPTR))寻址的程序存贮器字节选AMOVC A,@A+PC 83 由((A)+(PC));寻址的程序存贮器字节送A MOVX A,@Ri E2~E3 送外部数据(8位地址)送AMOVX A,@DPTR E0 送外部数据(16位地址)送AMOVX @Ri,A F2~F3 A送外部数据(8位地址)MOVX @DPTR,A F0 A送外部数据(16位地址)PUSH dircet C0 dircet 直接字节进栈,SP加1POP dircet D0 dircet 直接字节退栈,SP减1XCH A,Rn C8~CF 交换A和寄存器XCH A,dircet C5 dircet 交换A和直接字节XCH A,@Ri C6~C7 交换A和间接RAMXCH A,@Ri D6~D7 交换A和间接RAM的低位SWAP A C4二、算术操作(A的二个半字节交换)ADD A,Rn 28~2F 寄存器加到AADD A,dircet 25 dircet 直接字节加到AADD A,@Ri 26~27 间接RAM加到AADD A,#data 24data 立即数加到AADD A,Rn 38~3F 寄存器和进位位加到AADD A,dircet 35dircet 直接字节和进位位加到AADD A,@Ri 36~37 间接字节和进位位加到AADD A,data 34 data 立即数和进位位加到AADD A,Rn 98~9F A减去寄存器和进位位ADD A,dircet 95 dircet A减去直接字节和进位位ADD A,@Ri 36~37 间接RAM和进位位加到AADD A,data 34 data 立即数和进位位加到ASUBB A,Rn 98~9F A减去寄存器和进位位SUBB A,dircet 95 dircet A减去直接字节和进位位SUBB A,@Ri 96~97 A减去间接RAM和进位位SUBB A,#data 94 data A减去立即数和进位位INC A 04 A加1INC Rn 08~0F 寄存器加1INC dircet 05 dircet 直接字节加1INC @Ri 06~07 间接RAM加1DEC A 14 A减1DEC Rn 18~1F 寄存器减1DEC dircet 15 dircet 直接字节减1DEC @Ri 16~17 间接RAM减1INC DPTR A3 数据指针加1MUL AB A4 A乘以BDIV AB 84 A除以BDA A D4 A的十进制加法调整三、逻辑操作ANL A,Rn 58~5F 寄存器“与”到AANL A,dircet 55 dircet 直接字节“与”到AANL A,@Ri 56~57 间接RAm“与”到AANL A,#data 54 data 立即数“与”到AANL dircet A 52 dircet A“与”到直接字节ANL dircet,#data 53 dircet data 立即数“与”到直接字节ORL A,Rn 48~4F 寄存器“或”到AORL A,dircet 45 dircet 直接字节“或”到AORL A,@Ri 46~47 间接RAM“或”到AORL A,#data 44 data 立即数“或”到AORL dircet,A 42 dircet A“或”到直接字节ORL dircet,#data 43 dircet data 立即数“或”到直接字节XRL A,Rn 68~6F 寄存器“异或”到AXRL A,dircet 65 dircet 直接字节“异或”到AXRL A,@Ri 66~67 间接RAM“异或”到AXRL A,#data 64 data 立即数“异或”到AXRL dircet A 62 dircet A“异或”到直接字节XRL dircet,#data 63 dircet data 立即数“异或”到直接字节CLR A E4 清零CPL A F4 A取反RL A 23 A左环移RLC A 33 A通过进位左环移RR A 03 A右环移RRC A 13 A通过进位右环移四、控制程序转移ACALL addr 11 *1 addr(a7~a0) 绝对子程序调用LCALL addr 16 12 addr(15~8) 长子程序调用addr(7~0)RET 22 子程序调用返回RETI addr 11 32 中断调用返回AJMP addr 11 △1 addr(a7~a6) 绝对转移LJMP addr 16 02addr(15~8) 长转移addr(7~0)SJMP rel 80 rel 短转移,相对转移JMP @A+DPTR 73 相对于DPTR间接转移JZ rel 60 rel A为零转移JNZ rel 70 rel A为零转移CJNE A,dircet,rel B5 dircet rel 直接字节与A比较,不等则转移CJNE A,#data,rel B4 data rel 立即数与A比较,不等则转移CJNE A,Rn,#data,rel B8~BF data rel 立即数与寄存器比较,不等则转移CJNE @Ri,#data,rel B6~B7 data rel 立即数与间接RAM比较,不等则转移DJNZ Rn,rel D8~DF rel 寄存器减1,不为零则转移DJNZ dircet,rel B5 dircet rel 直接字节减1,不为零则转移NOP 00 空操作*=a10a9a8l△=a10a9a80五、布尔变量操作CLR C C3 清零进位CLR bit C2 清零直接位SETB C D3 置位进位SETB bit D2 置位直接位CPL C B3 进位取反CPL bit B2 直接位取反ANL C,bit 82 dit 直接数“与”到进位ANL C,/bit B0 直接位的反“与”到进位ORL C,bit 72 bit 直接位“或”到进位ORL C,/bit A0 bit 直接位的反“或”到进位MOV C,bit A2 bit 直接位送进位MOV bit,C 92 bit 进位送直接位JC rel 40 rel 进位位为1转移JNC rel 50 rel 进位位为0转移JB bit,rel 20 bit rel 直接位为1相对转移JNB bit,rel 30 bit rel 直接位为0相对转移JBC bit,rel 10 bit rel 直接位为1相对转移,然后清零该位。
三垦变频器参数设定一览表

恒速中过载
oLd
减速中过载
ouA
加速中的过电压
是否在空转中起动
改为转速跟踪起动
oun
恒速中的过电压
电机是否被其它外力拖动
改为不受外力影响的系统
设置大容量制动电阻
oud
减速中的过电压
是否在急剧减速中运转
延长减速时间(设定与负载的GD2相适应的减速时间)
ouP
制动电阻保护功能
动作的过电压
制动频率是否剧烈
3.内置PID控制模式
1
1
120
模拟输入切换
1.外部模拟VRF1(0~5V)
1
0
680
反馈信号断线输入时间
120秒(无断线保护功能)
秒
5
带供水基板追加设定值:
指令码编号CD
功能名称
用户数据设定及内容
最小设定单位
出厂设定
160
供水任选件的模式选择
09.没有辅助泵/11.有辅助泵
1
0
161
使用电机的设定·M1
减少制动频率
增加制动电阻容量
oPEn
输出缺相(在几Hz超低频下不能检测)
变频器的输出电缆是否缺相
切实连接好输出电缆
GAL 1
检测到Cd071=3的PID控制动作时的反馈信号断线
反馈信号电缆是否断线
反馈信号是否正常
Cd055或Cd063:增益频率是否正确
确实连接反馈信号电缆Cd055或Cd063:正确设定增益频率。
PonG
电源异常
控制线路端子的+24V输出电源是否过载或者短路
确认+24V输出电源的负载状态。
郑州天海给水设备有限公司
用
户
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
指令设定一览表惯例x:立即数m:数据存储器地址A:累加器i:0~7 号位addr:程序存储器地址Rev 1.00 66 2011-04-13注: 1. 对跳转指令而言,如果比较的结果牵涉到跳转即需2个周期,如果没有跳转发生,则只需一个周期即可。
2. 任何指令若要改变PCL的内容将需要2个周期来执行。
3. 对于“CLR WDT1”和“CLR WDT2”指令而言,TO和PDF标志位也许会受执行结果影响,“CLR WDT1” 和“CLR WDT2”被连续执行后,TO和PDF标志位会被清零,除此外TO和PDF标志位保持不变。
Rev 1.00 67 2011-04-13指令定义ADC A, [m] Add Data Memory to ACC with Carry指令说明将指定数据存储器、累加器和进位标志位的内容相加后,把结果储存回累加器。
功能表示ACC ← ACC + [m] + C影响标志位OV , Z , AC , CADCM A, [m] Add ACC to Data Memory with Carry指令说明将指定数据存储器、累加器和进位标志位的内容相加后,把结果储存回指定数据存储器。
功能表示[m] ←ACC + [m] + C影响标志位OV , Z , AC , CADD A, [m] Add Data Memory to ACC指令说明将指定数据存储器和累加器的内容相加后,把结果储存回累加器。
功能表示ACC ←ACC + [m]影响标志位OV , Z , AC , CADD A, x Add immediate data to ACC指令说明将累加器和立即数的内容相加后,把结果储存回累加器。
功能表示ACC ← ACC + x 影响标志位OV , Z , AC , CADDM A, [m] Add ACC to Data Memory指令说明将指定数据存储器和累加器的内容相加后,把结果储存回指定数据存储器。
功能表示[m] ←ACC + [m]影响标志位OV , Z , AC , CAND A, [m] Logical AND Data Memory to ACC指令说明将存在累加器和指定数据存储器中的数据作AND的运算,然后把结果储存回累加器。
功能表示ACC ← ACC“AND”[m]影响标志位ZAND A, x Logical AND immediate data to ACC指令说明将存在累加器中的数据和立即数作AND的运算,然后把结果储存回累加器。
功能表示ACC ← ACC“AND”x影响标志位ZANDM A, [m] Logical AND ACC to Data Memory指令说明将存在指定数据存储器和累加器中的数据作AND的运算,然后把结果储存回数据存储器。
功能表示[m] ← ACC“AND”[m]影响标志位ZCALL addr Subroutine call指令说明无条件地调用指定地址的子程序,此时程序计数器先加1获得下一个要执行的指令地址并压入堆栈,接着载入指定地址并从新地址继续执行程序,由于此指令需要额外的运算,所以为一个2周期的指令。
Rev 1.00 68 2011-04-13功能表示Stack ← Program Counter + 1Program Counter ← addr影响标志位NoneCLR [m] Clear Data Memory指令说明指定数据存储器中的每一位均清除为0。
功能表示[m] ← 00H影响标志位NoneCLR [m].i Clear bit of Data Memory 指令说明指定数据存储器中的i位清除为0。
功能表示[m].i ← 0影响标志位NoneCLR WDT Clear Watchdog Timer指令说明将TO、PDF 标志位和WDT全都清零。
功能表示WDT clearedTO ← 0PDF ← 0影响标志位TO , PDFCLR WDT1 Pre-clear Watchdog Timer指令说明将TO、PDF 标志位和WDT全都清零,请注意此指令要结合CLR WDT2一起动作且必须交替重复执行此项指令而没有与CLR WDT2交替执行将无任何作用。
执行才有作用,功能表示WDT cleared TO ← 0PDF← 0影响标志位TO , PDFCLR WDT2 Pre-clear Watchdog Timer指令说明将TO、PDF标志位和WDT全都清零,请注意此指令要结合CLR WDT1一起动作且重复执行此项指令而没有与CLR WDT1交替执行将无任何必须交替执行才有作用,作用。
功能表示WDT cleared TO ← 0PDF← 0影响标志位TO , PDFCPL [m] Complement Data Memory指令说明将指定数据存储器中的每一位取逻辑反,相当于从1变0或0变1。
——功能表示[m] ←[ m ]影响标志位ZCPLA [m] Complement Data Memory with result in ACC指令说明将指定数据存储器中的每一位取逻辑反,相当于从1变0或0变1,而结果被储存回累加器且数据存储器中的内容不变。
——功能表示ACC←[ m]影响标志位ZRev 1.00 69 2011-04-13DAA [m] Decimal-Adjust ACC for addition with result in Data Memory指令说明将存在累加器中的内容数值转换为BCD(二进制转成十进制)数值,如果低4位大于9或AC标志位被置位,则在低4位加上一个6,不然低4位的内容不变,如果高4位大于9或C标志位被置位,则在高4位加上一个6,十进制的转换主要是依照累加器和标志位状况,分别加上00H、06H、60H或66H,只有C标志位也许会被此指令影响,它会指出原始BCD 数是否大于100,并可以进行双精度十进制数相加。
功能表示[m] ← ACC + 00H 或[m] ← ACC + 06H 或[m] ← ACC + 60H 或[m] ← ACC + 66H影响标志位 CDEC [m] Decrement Data Memory指令说明将在指定数据存储器内的数据减1。
功能表示[m] ← [m] – 1影响标志位ZDECA [m] Decrement Data Memory with result in ACC指令说明将在指定数据存储器内的数据减1,把结果储存回累加器且数据存储器中的内容不变。
功能表示ACC ← [m] – 1影响标志位ZHALT Enter power down mode指令说明此指令停止程序的执行并且关闭系统时钟,但数据存储器和寄存器的内容仍被保留,WDT和预分频器(Prescaler)被清零,暂停标志位PDF被置位且WDT溢出标志位TO 被清零。
功能表示TO ← 0 PDF ← 1影响标志位TO , PDFINC [m] Increment Data Memory指令说明将指定数据存储器内的数据加1。
功能表示[m] ← [m] + 1影响标志位ZINCA [m] Increment Data Memory with result in ACC指令说明将指定数据存储器内的数据加1,把结果储存回累加器且数据存储器中的内容不变。
功能表示ACC ← [m] + 1影响标志位ZJMP addr Jump unconditionally指令说明程序计数器的内容被指定地址所取代,程序由新地址继续执行,当新地址被加载入时,必须插入一个空指令周期,所以此指令为2个周期的指令功能表示Program Counter ← addr影响标志位NoneMOV A, [m] Move Data Memory to ACC指令说明将指定数据存储器的内容复制到累加器中。
功能表示ACC← [m]影响标志位NoneRev 1.00 70 2011-04-13MOV A, x Move immediate data to ACC 指令说明将立即数载入至累加器中。
功能表示ACC ← x 影响标志位NoneMOV [m], A Move ACC to Data Memory指令说明将累加器的内容复制到指定数据存储器。
功能表示[m] ← ACC影响标志位NoneNOP No operation指令说明空操作,接下来顺序执行下一条指令。
功能表示No operation影响标志位NoneOR A, [m] Logical OR Data Memory to ACC指令说明将存在累加器和指定数据存储器中的数据作OR的运算,然后把结果储存回累加器。
功能表示ACC ← ACC“OR”[m]影响标志位ZOR A, x Logical OR immediate data to ACC指令说明将存在累加器中的数据和立即数作OR的运算,然后把结果储存回累加器。
功能表示ACC ← ACC“OR”x影响标志位ZORM A, [m] Logical OR ACC to Data Memory指令说明将存在指定数据存储器和累加器中的数据作OR的运算,然后把结果储存回数据存储器。
功能表示[m] ← ACC“OR”[m]影响标志位ZRET Return from subroutine指令说明将堆栈区的数据取回至程序计数器,程序由取回的地址继续执行。
功能表示Program Count er←Stack影响标志位NoneRET A, x Return from subroutine and load immediate data to ACC指令说明将堆栈区的数据取回至程序计数器且累加器载入立即数,程序由取回的地址继续执行。
功能表示Program Counter ← Stack ACC←x影响标志位NoneRETI Return from interrupt指令说明将堆栈区的数据取回至程序计数器且中断功能通过EMI位重新被使能,EMI是控制中断使能的主中断位(寄存器INTC的第0位),如果在执行RETI指令之前还有中断未被响应,则这个中断将在返回主程序之前被响应。
功能表示Program Counter ←Stack EMI ← 1影响标志位NoneRev 1.00 71 2011-04-13RL [m] Rotate Data Memory left指令说明将指定数据存储器的内容向左移1个位,且第7位移回第0 位。
功能表示[m].(i+1) ← [m].i ; (i = 0~6)[m].0 ← [m].7影响标志位NoneRLA [m] Rotate Data Memory left with result in ACC指令说明将指定数据存储器的内容向左移1个位,且第7位移回第0位,而移位的结果储存回累加器且数据存储器中的内容不变。