数字图像处理实验6-图像的二值化-轮廓跟踪
opencv二值化轮廓提取
opencv二值化轮廓提取
在图像处理中,二值化是一种基本的图像分割方法,通常用于提取感
兴趣的目标轮廓。
通过将图像中的像素值限定在两个特定的值范围内,即0和255(或1和0),将图像分为背景和前景两部分。
opencv是一个广泛使用的开源计算机视觉库,提供了许多图像处理功能,包括二值化和轮廓提取。
在opencv中,可以使用以下步骤实现二值化轮廓提取:
1. 读取图像:使用opencv的函数读取图像,并将其转换为灰度图像(单通道图像)。
2. 图像二值化:通过使用opencv的函数,将灰度图像进行二值化处理。
可以选择适当的阈值方法,如自适应阈值或全局阈值等。
3. 轮廓提取:使用opencv的函数,对二值化图像进行轮廓提取操作。
可以选择适当的轮廓提取算法,如findContours()函数。
该函数将返
回图像中所有轮廓的坐标。
4. 绘制轮廓:使用opencv的绘图函数,将得到的轮廓坐标在原始图
像上进行绘制,以便可视化结果。
5. 显示结果:使用opencv的图像显示函数,将绘制了轮廓的图像显
示出来,以便查看或保存结果。
通过以上步骤,可以实现对图像的二值化轮廓提取。
通过调整二值化
的阈值和选择合适的轮廓提取算法,可以获得更好的轮廓提取效果。
这在许多计算机视觉应用中都是一个重要的步骤,如目标检测、物体跟踪等。
数字图像处理中的二值化技术研究

数字图像处理中的二值化技术研究数字图像处理是指对数字化的图像进行各种算法处理,以改善图像质量、实现目标应用和进行图像分析等。
其中,二值化技术是数字图像处理中应用最为广泛的技术之一。
本文将从二值化的基本原理、常见算法、优化技术以及应用等方面进行综述。
一、二值化的基本原理二值化是将一幅灰度图像转换成只有两种颜色的图像,常见的是黑白二值图像。
它的目的是将灰度范围较大的图像转换为仅包含两种灰度值的图像,以便进行图像分析和处理。
二值化的基本原理就是根据一定的阈值将像素点的灰度值分为两类,一类是大于等于阈值的像素点,另一类是小于阈值的像素点。
然后将这两类像素点分别用黑色和白色进行表示,从而得到一幅二值图像。
二、常见的二值化算法1.全局阈值法全局阈值法也称为固定阈值法,是最简单、最基本的二值化算法之一。
它的原理是将整幅图像的灰度直方图进行分析,将图像中所有像素的灰度值设置为一个固定的阈值,一般取灰度直方图的平均值或中值。
然后对于灰度值大于等于该值的像素点置为白色,灰度值小于该值的像素点置为黑色。
但这种算法容易受到光照不均匀、噪声较多等因素的影响,产生误判。
2.手动阈值法手动阈值法是根据观察或经验设置阈值,也称为交互式的阈值法。
它适用于像素灰度值分布不均匀,且图像背景和目标差异大的情况。
3.自适应阈值法自适应阈值法是根据图像在局部区域内的灰度值特征进行划分,常见的有局部均值法和Otsu法。
局部均值法是将像素点周围一定大小的区域内的灰度值作为阈值,并将该像素点二值化。
这种算法可以对灰度分布不均匀、光照不均匀等情况适用。
Otsu法是利用图像中目标与背景之间灰度值分布的偏差,自适应地确定一个能够最大程度区分两个类别的阈值。
4.基于形态学的阈值法形态学阈值法基于二值图像形态学操作的方法,能够有效去除噪声和骨骼化等图像处理,并能够保留目标的边界。
它的核心思想是基于图像特征对阈值进行判断,通常是先对图像进行形态学膨胀操作,然后求出局部的最大值,作为阈值进行二值化操作。
二值化图像轮廓跟踪计算质心周长面积matlab

二值化图像轮廓跟踪计算质心周长面积matlab在MATLAB中进行二值图像轮廓跟踪计算质心、周长和面积,可以使用以下步骤:1. 读取二值图像```matlabbinaryImage = imread('binary_image.png');```2. 使用bwboundaries函数获取轮廓```matlabboundaries = bwboundaries(binaryImage);```3. 计算每个轮廓的质心、周长和面积```matlabcentroids = {};perimeters = [];areas = [];for k = 1:length(boundaries)boundary = boundaries{k};% 计算质心坐标centroid = mean(boundary);centroids{k} = centroid;% 计算周长perimeter = sum(sqrt(sum(diff(boundary).^2, 2)));perimeters(k) = perimeter;% 计算面积area = polyarea(boundary(:, 2), boundary(:, 1));areas(k) = area;end```4. 可选:绘制轮廓和质心```matlabfigure;imshow(binaryImage);hold on;for k = 1:length(boundaries)boundary = boundaries{k};% 绘制轮廓plot(boundary(:, 2), boundary(:, 1), 'r', 'LineWidth', 2);% 绘制质心centroid = centroids{k};plot(centroid(2), centroid(1), 'bo', 'MarkerSize', 10, 'LineWidth', 2);endhold off;```请注意,上述代码仅适用于处理单个物体的轮廓。
轮廓跟踪算法
轮廓跟踪算法
轮廓跟踪算法是图像处理和计算机视觉领域中常用的技术。
它可以在图像中提取出物体的边缘轮廓,并且将其进行分析和处理,从而达到目的。
轮廓跟踪算法的基本原理是基于图像中的颜色、形状、纹理等特征,通过对物体的边缘进行分析,得出物体的轮廓。
这个过程中的关键步骤就是找出图像中边缘的像素点,从而构成边缘的曲线。
常见的轮廓跟踪算法主要有追踪边缘算法和链码算法。
追踪边缘算法主要是从图像中选取一点作为起点,然后按照一定的规则,向周围的像素点扩展,直到找到完整的轮廓。
常用的方法是从上、下、左、右四个方向依次扫描像素点,找到第一个黑色像素点,作为起点。
然后对该点进行扩展,分别向各个方向寻找与该点相邻的边缘像素点,不断迭代并记录下轮廓上的点集,直到回到起点为止。
这种算法简单易用,适用于大部分图像。
综上所述,轮廓跟踪算法是一种能够在图像中检测物体轮廓的有效方法。
它的应用广泛,包括医学影像、自动驾驶、机器视觉和计算机图形处理等领域。
虽然这些算法相对简单,但它们仍然是最常用和最有效的轮廓识别技术之一,未来仍有很大的研究发展空间。
毕业设计--基于模式识别的水果智能分类系统[管理资料]
![毕业设计--基于模式识别的水果智能分类系统[管理资料]](https://img.taocdn.com/s3/m/fcd8d79527d3240c8547ef9b.png)
毕业设计基于模式识别的水果智能分类系统基于模式识别的水果智能分类系统摘要本论文综合运用了数字图像处理,模式识别的理论来构建起一个简单的水果智能分类系统。
实现了在相同条件下拍摄的水果图片的特征提取和种类识别,在此基础上设计出了基于人工神经网络的水果智能分类器,由计算机自动调整神经网络中各个权值,达到水果种类识别的自动化。
数字图像处理对源位图进行了加工,是特征提取的基础。
数字图像处理的理论涉及到彩色图像的灰度化、中值滤波、二值化、轮廓提取、种子填充、轮廓跟踪等。
其中,二值化采用了基本自适应门限的方法。
模式识别包括了特征提取和分类器的设计,是种类识别的关键。
特征提取主要利用了水果的几何特征,反映了水果的大小和形状。
分类器的设计主要采用了人工神经网络的方式来实现,具体说来是利用了神经网络中反向传播算法来进行网络训练,并利用训练结果完成了水果种类的智能识别。
关键词:特征提取人工神经网络二值化基本自适应门限反向传播算法A Intellective System for Fruit ClassificationBased on Pattern RecognitionAbstractIn this paper, we apply the theory of digital image processing and pattern recognition to construct a simply and intellective system for fruit classification based on pattern recognition. We have already fulfilled characteristic withdrew and type recognition for the pictures of fruit which are photographed under the same condition .We have also designed a categorize machine based on artificial neuro-network , which can adjust the weights of neuro-network automatically by computer in order to recognize the type of the fruit.Digital image processing deals with the original bitmap ,which is the basis of characteristic withdrew .The theory of digital image processing refers to the gradation of color image ,median filter ,image binary, outline withdrew ,the seed fills ,outline track and so on. Among them, image binary makes use of the basic auto-adapted threshold method.Pattern recognition involves characteristic withdrew and the design of categorize machine, which are the keys of type recognition. The characteristic withdrew has mainly used fruit's geometry characteristics ,which reflect fruit’s size and shape .The categorize machine is designed by means of artificial neuro-network, which uses the algorithm of Back-Propogation in detail and completes the fruit type intelligent recognition by using the training results. Keywords:characteristic withdrew, artificial neuro-network, image binary, basic auto-adapted threshold, the algorithm of Back-Propogation.目录摘要 (I)Abstract (III)第1章绪论 (6)模式识别的发展情况 (6)模式识别和模式的概念 (6)模式识别的应用 (7)水果智能分类系统的研究情况 (7)国内研究现状 (7)国外研究现状 (8)第2章图像采集 (9)图像采集的几种方法 (9)本课题所采用的图像采集方法 (9)第3章图像预处理 (11)数字图像处理的基本内容 (11)常用的几种图像文件 (11)与设备无关位图 (12)位图的显示 (14)彩色图像的颜色空间转换 (15)彩色图像的灰度化处理 (17)将伪彩色图像转化为灰度图 (17)将24位真彩位图转化为灰度图 (17)中值滤波 (18)图像的二值化处理 (18)基本全局门限 (19)基本自适应门限 (20)第4章图像分割与特征提取 (21)消除小杂质区域面积 (21)二值图像的区域标记 (21)二值图像的小区域消除 (22)消除大杂质区域 (22)轮廓提取 (23)种子填充 (24)消除杂质区域 (25)特征提取简介 (25)本系统的特征提取 (26)特征形成 (26)特征获取 (26)第5章分类器的设计 (28)人工神经网络基础 (28)人工神经元 (28)前馈神经网络 (29)反向传播算法的应用(BP法) (29)数据归一化 (29)BP算法 (30)神经网络设计思路 (32)结论 (34)致谢 (36)参考文献 (35)附录 (32)第1章绪论1.1模式识别的发展情况模式识别[1]诞生于20世纪20年代,随着40年代计算机的出现,50年代人工智能的兴起,模式识别在60年代初迅速发展成一门学科。
数字图像处理实验
数字图像处理实验实验总学时:10学时实验目的:本实验的目的是通过实验进一步理解和掌握数字图像处理原理和方法。
通过分析、实现现有的图像处理算法,学习和掌握常用的图像处理技术。
实验内容:数字图像处理的实验内容主要有三个方面:(1) 对图像灰度作某种变换,增强其中的有用信息,抑制无用信息,使图像的视在质量提高,以便于人眼观察、理解或用计算机对其作进一步的处理。
(2) 用某种特殊手段提取、描述和分析图像中所包含的某些特征和特殊的信息,主要的目的是便于计算机对图像作进一步的分析和理解,经常作为模式识别和计算机视觉的预处理。
这些特征包括很多方面,例如,图像的频域特性、灰度特征、边界特征等。
(3) 图像的变换,以便于图像的频域处理。
实验一图像的点处理实验内容及实验原理:1、灰度的线性变换灰度的线性变换就是将图像中所有的点的灰度按照线性灰度变换函数进行变换。
该线性灰度变换函数是一个一维线性函数:灰度变换方程为:其中参数为线性函数的斜率,函数的在y轴的截距,表示输入图像的灰度,表示输出图像的灰度。
要求:输入一幅图像,根据输入的斜率和截距进行线性变换,并显示。
2、灰度拉伸灰度拉伸和灰度线性变换相似。
不同之处在于它是分段线性变换。
表达如下:其中,(x1,y1)和(x2,y2)是分段函数的转折点。
要求:输入一幅图像,根据选择的转折点,进行灰度拉伸,显示变换后的图像。
3、灰度直方图灰度直方图是灰度值的函数,描述的是图像中具有该灰度值的像素的个数,其横坐标表示像素的灰度级别,纵坐标表示该灰度出现的频率(象素的个数)。
要求:输入一幅图像,显示它的灰度直方图,可以根据输入的参数(上限、下限)显示特定范围的灰度直方图。
4、直方图均衡:要求1 显示一幅图像pout.bmp的直方图;2 用直方图均衡对图像pout.bmp进行增强;3 显示增强后的图像。
实验二:数字图像的平滑实验内容及实验原理:1.用均值滤波器(即邻域平均法)去除图像中的噪声;2.用中值滤波器去除图像中的噪声3. 比较两种方法的处理结果 实验步骤:用原始图象lena.bmp 或cameraman.bmp 加产生的3%椒盐噪声图象合成一幅有噪声的图象并显示;1. 用均值滤波器去除图像中的噪声(选3x3窗口);2. f (x 0,y 0)=Med {f (x,y )∨x ∈[x 0−N,x 0+N ],y ∈[y 0−N,y 0+N ]}用中值滤波器去除图像中的噪声(选3x3窗口做中值滤波);3. 将两种处理方法的结果与原图比较,注意两种处理方法对边缘的影响。
图像处理中的图像二值化算法

图像处理中的图像二值化算法随着科技的发展,图像处理技术应用越来越广泛。
作为一项基础技术,图像二值化算法在图像处理中扮演着非常关键的角色,它可以将图像分割成黑白两种颜色,也就是将图像中的灰度值转化为0和1,简化了后续的处理流程。
本文将介绍图像二值化算法的基本原理和应用情况。
一、二值化算法的基本原理在图像中,每个像素都有一定的灰度值,在8位灰度图像中,灰度值的范围在0-255之间,其中0是代表黑色,255代表白色。
当我们需要处理一张图片时,如果直接对每一个灰度值进行处理,那么处理的过程就会非常繁琐,因此,我们需要将图像灰度值转化为0和1两种数字进行处理。
常见的二值化算法有全局阈值算法、局部阈值算法、自适应阈值算法、基于梯度算法等。
其中,全局阈值算法是最基本、最简单的一种算法。
它将整张图像分成黑白两个部分,通过将整个图像的像素点的灰度值与一个固定的阈值进行比较,如果像素点的灰度值大于阈值,就将该像素点的灰度值置为1,否则置为0。
使用全局二值化算法的步骤如下:1.将图像读入到内存中;2.将图像转化为灰度图像;3.计算整个图像的平均灰度值,该平均灰度值作为全局阈值;4.将图像中每个像素点的灰度值与该全局阈值进行比较,灰度值大于等于该全局阈值的像素点赋值为255(代表白色),小于该阈值的像素点赋值为0(代表黑色);5.输出处理后的图像。
当然,这种方法的缺点也非常明显,那就是无法适应不同场合下的图像处理需求,处理效果难以保证。
因此,我们需要更为灵活的算法和方法来进行二值化处理。
二、不同类型的二值化算法1.基于直方图的全局阈值法二值化算法中的全局阈值算法通常是将整个图像分成两类像素:一类像素比较暗,另一类像素比较亮。
在直方图中,该分割就是直方图上的两个峰。
我们可以通过直方图分析来确定这个阈值,并将灰度值低于阈值的像素变为黑色,将灰度值高于阈值的像素变为白色。
对于图像I(x,y),它的灰度直方图h(i)可以表示为:h(i) = N(i) / MN (i=0,1,…,L-1)其中N(i)是图像中所有像素灰度值为i的像素数量,MN是总的像素数量,L是灰度级别数量(在8位图像中,L等于256)然后我们需要确定一个阈值T,所有像素点的灰度值小于T的变为黑色,大于等于T的变为白色。
轮廓二值算法

轮廓二值算法
轮廓二值算法是一种图像处理方法,主要用于从图像中提取物体的轮廓。
它将图像中的像素分为两类,一类是物体内部像素,另一类是背景像素。
该算法主要通过应用阈值处理、边缘检测和形态学操作等技术来实现。
以下是一种常见的轮廓二值算法步骤:
1.预处理:对原始图像进行去噪、平滑处理,以消除图像中的噪声和细微变化。
2.应用阈值处理:根据预处理后的图像,选择一个合适的阈值,将图像中的像素分为两类。
一般来说,阈值的选择可以通过观察图像的直方图来实现,使得背景和物体之间的像素值差异最大。
3.边缘检测:在二值图像中,应用边缘检测算法(如Sobel算子、Prewitt算子等)来识别物体的边缘。
边缘检测结果是一系列连接物体内部像素的线段。
4.轮廓提取:遍历边缘检测结果中的每个线段,找到相邻且方向相同的线段,将其合并成一条轮廓。
最终得到物体的轮廓集合。
5.形态学操作:对提取的轮廓进行形态学处理,如开运算、闭运算等,以消除噪声和填充空洞。
6.轮廓优化:对优化后的轮廓进行细化处理,以消除宽度过大的轮廓线段。
7.输出结果:将优化后的轮廓作为最终结果输出。
这种轮廓二值算法在许多领域都有应用,例如计算机视觉、目标检测和图像分割等。
通过该算法,可以快速准确地提取物体轮廓,为后续的图像分析和处理提供基础。
轮廓识别算法
轮廓识别算法
轮廓识别算法是一种数字图像处理算法,用于从二值化、边缘检测或阈值化的图像中提取目标物体的外形边缘。
轮廓识别算法通常采用基于边缘跟踪的方法,通过对边缘像素的追踪,将相邻的边缘像素连接成一条闭合的边缘,从而得到目标物体的轮廓。
在轮廓识别算法中,常用的算法包括:
1.基于连通性的轮廓识别算法:该算法基于像素的连通性,通过搜索所有像素点,将具有相同颜色的像素点相连组成连通区域,并确定该区域的外围轮廓。
2.基于边缘检测的轮廓识别算法:该算法通过对原始图像进行边缘检测,得到一组离散的边缘像素点,然后对这些像素点进行追踪,将相邻的边缘像素连接成一条闭合的边缘。
3.基于分割的轮廓识别算法:该算法先将原始图像分割成多个区域,然后选取具有显著边界的区域,通过对这些区域的边界像素进行追踪,得到目标物体的轮廓。
轮廓识别算法在数字图像处理、计算机视觉、机器人等领域有广泛的应用,例如物体识别、图像分割、目标跟踪、自动化控制等。
数字图像处理 实验报告(完整版)

数字图像处理实验一 MATLAB数字图像处理初步一、显示图像1.利用imread( )函数读取一幅图像,假设其名为lily.tif,存入一个数组中;2.利用whos 命令提取该读入图像flower.tif的基本信息;3.利用imshow()函数来显示这幅图像;实验结果如下图:源代码:>>I=imread('lily.tif')>> whos I>> imshow(I)二、压缩图像4.利用imfinfo函数来获取图像文件的压缩,颜色等等其他的详细信息;5.利用imwrite()函数来压缩这幅图象,将其保存为一幅压缩了像素的jpg文件,设为lily.jpg;语法:imwrite(原图像,新图像,‘quality’,q), q取0-100。
6.同样利用imwrite()函数将最初读入的tif图象另存为一幅bmp图像,设为flily.bmp。
7.用imread()读入图像Sunset.jpg和Winter.jpg;8.用imfinfo()获取图像Sunset.jpg和Winter.jpg的大小;9.用figure,imshow()分别将Sunset.jpg和Winter.jpg显示出来,观察两幅图像的质量。
其中9的实验结果如下图:源代码:4~6(接上面两个) >>I=imread('lily.tif')>> imfinfo 'lily.tif';>> imwrite(I,'lily.jpg','quality',20);>> imwrite(I,'lily.bmp');7~9 >>I=imread('Sunset.jpg');>>J=imread('Winter.jpg')>>imfinfo 'Sunset.jpg'>> imfinfo 'Winter.jpg'>>figure(1),imshow('Sunset.jpg')>>figure(2),imshow('Winter.jpg')三、二值化图像10.用im2bw将一幅灰度图像转化为二值图像,并且用imshow显示出来观察图像的特征。
数字图像处理第6章二值图像处理-专业文档资料
二阶矩则描述了图像的对于直线和对轴与轴的转动惯量,因 此常常也把物体的二阶矩称为惯性矩。
中心矩 :
p q (x x)p(y y )qf(x ,y )d xp d ,q y 0 ,1 ,2
第6章 二值图像处理
低阶矩主要描述区域的面积、转动惯量、质心等等,具有 明显得几何意义,,四阶矩描述峰值的状态等等,一般 来说高阶矩受到图像离散化等的影响,高阶矩一般在应用中 不一定十分准确。
D e(ac)2(bd)2
② 街区距离,用Ds来表示:
(6-1)
D s |ac||bd|
③ 棋盘距离,用Dg表示如下:
(6-2)
D gma a x c|, ( |b|d|)
(6-3)
三者之间的关系为:Dg Ds,如De图6-1(a)、(b)和(c)所示。
第6章 二值图像处理
(a) 欧氏距离 (b) 街区距离 (c) 棋盘距离 (d)≤2构成菱形 (e)≤2构成正方形 图6-1 三种距离示意图
第6章 二值图像处理
6.2 二值图像的几何特征描述
6.2.1 二值图像中曲线的描述 6.2.1.1 轮廓跟踪-甲虫算法
目标区域的边界轮廓是描述目标的重要特征,对于二 值图像中的目标区域轮廓可以通过一种简单的轮廓跟踪算 法来得到,这种方法也被称作甲虫算法。如图6-6所示的二 值图像4连通分量,假定目标区域用1(黑色)表示,背景区域
1 (x,y)(x,y)
f(x,y)
0
else
M1N1
那么区域的面积为: S f (x, y) x0 y0
如果经过目标标记,区域占有的连通分量有k个,那么目
标区域的面积则是k个连通分量的面积总和,即有:
k
S Si i 1
图像处理中的目标跟踪方法综述

图像处理中的目标跟踪方法综述目标跟踪是计算机视觉领域的一个重要研究方向,旨在从图像序列中实时追踪一个或多个目标。
目标跟踪在各种应用中都有广泛的应用,如视频监控、自动驾驶、虚拟现实等。
本文将综述目标跟踪领域涉及的一些主要方法和技术。
1. 基于特征提取的目标跟踪方法基于特征提取的目标跟踪方法通过提取目标区域的特征来进行目标跟踪。
其中,颜色特征是最常用的一种特征,可以通过计算目标区域的颜色直方图或使用颜色模型来表示。
此外,纹理特征、边缘特征和形状特征等也可以用来描述目标。
2. 基于相关滤波的目标跟踪方法相关滤波是一种常用的目标跟踪方法,它通过计算目标模板和候选区域之间的相关性来进行目标跟踪。
常见的相关滤波方法包括均方差滤波和归一化相关滤波。
这些方法在一定程度上可以提高目标跟踪的准确性和鲁棒性。
3. 基于机器学习的目标跟踪方法机器学习在目标跟踪中的应用越来越广泛,其中最常见的方法是在线学习。
在线学习可以根据当前跟踪结果和新的训练样本来不断更新目标模型,从而实现自适应的目标跟踪。
常见的在线学习方法包括增量学习、在线支持向量机和在线随机森林等。
4. 基于深度学习的目标跟踪方法深度学习是目前计算机视觉和图像处理领域的热门技术,也在目标跟踪中取得了显著的成果。
深度学习方法通过卷积神经网络(CNN)来学习目标的特征表示,并利用循环神经网络(RNN)或卷积神经网络来预测目标的位置。
这些方法在目标跟踪的准确性和鲁棒性方面表现出色。
5. 基于多特征融合的目标跟踪方法多特征融合是提高目标跟踪性能的一种常用策略。
它可以将不同尺度、不同特征的信息进行融合,从而提高目标跟踪的准确性和鲁棒性。
常见的多特征融合方法包括特征加权、特征选择和特征级联等。
综上所述,目标跟踪在图像处理中扮演着重要的角色。
各种方法和技术的不断发展与创新,为目标跟踪的准确性和鲁棒性提供了更高的要求和更多的可能性。
因此,我们可以期望在未来的研究中会出现更多有效的目标跟踪方法,为各种应用提供更好的解决方案。
数字图像处理实验报告实验三
代码:
I=imread('lines.png');
F=rgb2gray(I);
subplot(2,2,1);
imshow(I);
title('原始图像');
thread=130/255;
subplot(2,2,2);
imhist(F);
图5-2 添上一层(漆)
3.开运算open:
4.闭close:
5.HMT(Hit-Miss Transform:击中——击不中变换)
条件严格的模板匹配
模板由两部分组成。 :物体, :背景。
图5-3 击不中变换示意图
性质:
(1) 时,
(2)
6.细化/粗化
(1)细化(Thin)
去掉满足匹配条件的点。
图5-4 细化示意图
se = strel('ball',5,5);
I2 = imerode(I,se);
imshow(I), title('Original')
figure, imshow(I2), title('Eroded')
Matlab用imopen函数实现图像开运算。用法为:
imopen(I,se);
I为图像源,se为结构元素
构造一个中心具有菱形结构的结构元素,R为跟中心点的距离
SE = strel('rectangle',MN)
构造一个矩形的结构元素,MN可写在[3 4],表示3行4列
SE = strel('square',W)
构造一个正方形的矩阵。
轮廓线追踪算法在图像处理中的应用
轮廓线追踪算法在图像处理中的应用图像处理是计算机科学中一项非常重要的研究领域。
随着数字媒体领域的快速发展,越来越多的人和机构开始关注图像处理技术。
图像处理涉及诸多技术,比如图像增强、数字滤波、形态学处理等。
而轮廓线追踪算法在图像处理中的应用也越来越受到关注。
什么是轮廓线追踪算法?轮廓线追踪算法是一种常见的图形处理算法。
它的作用是将物体轮廓或边缘所在像素点的坐标值按顺序连接起来,形成一个轮廓或边缘的闭合路径。
轮廓线追踪算法是用来获取边缘或轮廓线的关键算法之一。
轮廓线追踪算法的运用轮廓线追踪算法在图像处理中应用广泛,例如人脸识别、车牌识别、数字识别等。
其中,在数字识别中,轮廓线追踪算法被广泛应用。
数字识别是图像处理中一个重要的研究方向,数字识别的目的是从未知的图像中识别出数字,自动的将数字区别开来。
数字识别主要分为两个阶段:预处理和识别。
预处理阶段是将原始的图像经过去噪、二值化、轮廓提取等处理之后,得到可以识别的数字的图像。
识别阶段是将预处理之后的图像传递到识别模型中,根据模型返回结果来判断图像中的数字。
而轮廓线追踪算法则是在预处理阶段中扮演着重要的角色。
轮廓线提取的过程,首先需要进行图像的二值化。
在二值化之后,我们就需要将图像中的轮廓线提取出来。
这时,轮廓线追踪算法就起到了关键作用。
轮廓线提取就是通过轮廓线追踪算法将边缘检测之后的像素点连接起来,形成一个封闭的轮廓。
轮廓线提取可以采用多种算法,其中最常用的是基于边沿像素点的轮廓线追踪算法。
这种算法在处理图像中的边缘或轮廓时,会从某个像素点开始,顺着边沿向一个方向探寻新的像素点,然后验证这个像素点是否在轮廓线上。
如果是,就按照顺时针或逆时针方式依次连接它们。
这种算法一般是沿着边沿像素点,以顺时针或逆时针方向搜索相邻像素点并连接起来,直到封闭成轮廓线,从而得到了图像中的轮廓线。
轮廓线追踪算法的优势轮廓线追踪算法在数字图像处理中具有很大的优势。
首先,它可以识别出图像中的重要轮廓信息。
matlab练习程序-二值图像内外边界跟踪
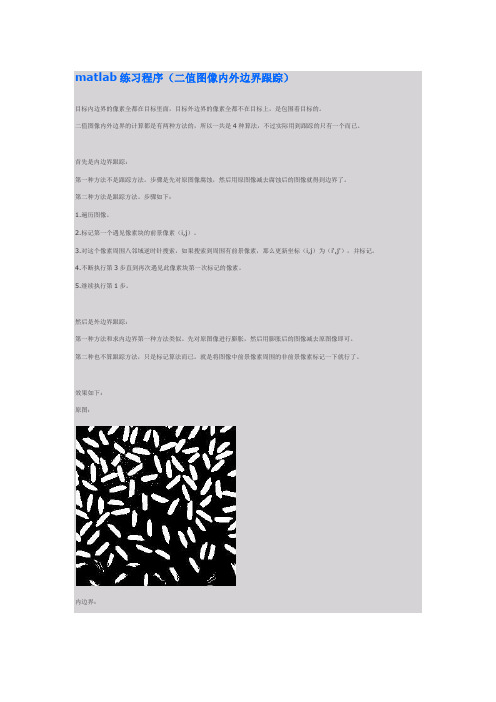
matlab练习程序(二值图像内外边界跟踪)目标内边界的像素全都在目标里面,目标外边界的像素全都不在目标上,是包围着目标的。
二值图像内外边界的计算都是有两种方法的,所以一共是4种算法,不过实际用到跟踪的只有一个而已。
首先是内边界跟踪:第一种方法不是跟踪方法。
步骤是先对原图像腐蚀,然后用原图像减去腐蚀后的图像就得到边界了。
第二种方法是跟踪方法。
步骤如下:1.遍历图像。
2.标记第一个遇见像素块的前景像素(i,j)。
3.对这个像素周围八邻域逆时针搜索,如果搜索到周围有前景像素,那么更新坐标(i,j)为(i',j'),并标记。
4.不断执行第3步直到再次遇见此像素块第一次标记的像素。
5.继续执行第1步。
然后是外边界跟踪:第一种方法和求内边界第一种方法类似。
先对原图像进行膨胀,然后用膨胀后的图像减去原图像即可。
第二种也不算跟踪方法,只是标记算法而已。
就是将图像中前景像素周围的非前景像素标记一下就行了。
效果如下:原图:内边界:外边界:matlab程序如下:内边界:clear all;close all;clc;img=imread('rice.png');img=img>128;imshow(img);[m n]=size(img);imgn=zeros(m,n); %边界标记图像ed=[-1 -1;0 -1;1 -1;10;11;01;-11;-10]; %从左上角像素,逆时针搜索for i=2:m-1for j=2:n-1if img(i,j)==1 && imgn(i,j)==0 %当前是没标记的白色像素if sum(sum(img(i-1:i+1,j-1:j+1)))~=9 %块内部的白像素不标记ii=i; %像素块内部搜寻使用的坐标jj=j;imgn(i,j)=2; %本像素块第一个标记的边界,第一个边界像素为2while imgn(ii,jj)~=2 %是否沿着像素块搜寻一圈了。
实验三图像分析实验——图像分割、形态学及边缘与轮廓分析

实验三图像分析实验——图像分割、形态学及边缘与轮廓分析一、实验条件PC机数字图像处理实验教学软件大量样图二、实验目的1、熟悉图像形态学分析的基本原理,观察不同形态学方法处理的结果;2、熟悉图像阈值分割、区域生长、投影及差影检测和模板匹配的基本原理,观察处理的结果;3、熟悉图像边缘检测、Hough平行线检测、轮廓提取及跟踪和种子填充的基本原理,观察处理的结果;4、了解图像矩、空穴检测、骨架提取的基本原理,观察处理的结果。
三、实验原理本次实验侧重于演示观察,由于内容繁多,并且系统中已有部分实验项目的原理说明,因此实验原理及编程实现步骤这里不再详细叙述,有兴趣的同学可以查阅数字图像处理方面的有关书籍。
四、实验内容1、图像形态学分析内容包括:图像膨胀、图像腐蚀、开运算、闭运算和图像细化针对二值图像进行处理,有文字说明,实验步骤中将详细介绍其使用方法。
2、图像分割内容包括:阈值分割、区域生长、投影检测、差影检测和模板匹配阈值分割:支持灰度图像。
从图库中选择图像分割中的源图, 然后执行图像分析→图像分割→阈值分割, 比较原图和分割后的图, 对照直方图分析阈值分割的特点。
对源图再执行一次图像变换→点运算→阈值变换, 比较分析阈值变换和阈值分割的结果。
区域生长:支持灰度图像。
操作方法与阈值分割类似,比较分析其与阈值分割的不同。
投影检测:只支持二值图像。
从图库中选择投影检测中的源图, 然后执行图像分析→投影检测→水平投影, 然后再垂直投影, 记录下检测部分的水平和垂直方向的位置。
如有必要, 在检测之前, 对图像进行平滑消噪。
差影检测:支持灰度图像。
从图库中选择图像合成中的源图, 然后执行图像分析→图像合成→图像相减, 在弹出的文件对话框中选择图库图像合成中的模板图像,观察分析差影结果。
模板匹配:支持灰度图像。
从图库中选择模板匹配中的源图, 然后执行图像分析→模式识别→模板匹配, 在弹出的文件对话框中选择图库模板匹配中的模板图像, 观察分析结果。
一种新的二值图像目标轮廓跟踪算法

一种新的二值图像目标轮廓跟踪算法
周丰乐;徐向民;肖跃;周娇
【期刊名称】《微计算机信息》
【年(卷),期】2007(000)02X
【摘要】提出了根据方向记忆和动态权值确定下一边界点的二值图像目标轮廓边界跟踪算法。
首先搜索轮廓内边界予以标记,并以该标记作为指导,结合上一边界点位置对搜索方向动态赋予不同权值,综合分析后得到下一轮廓边界点。
由于采用内外边界的对照搜索,可以较好地过滤图像二值化引起的边界噪声。
对于不封闭曲线,本算法也可通过一次扫描得到其轮廓信息。
实验表明,该算法在轮廓边界提取速度和准确度方面都有较以往跟踪算法更好的性能,在搜索智能化和处理复杂轮廓方面也有更好的表现。
【总页数】3页(P259-261)
【作者】周丰乐;徐向民;肖跃;周娇
【作者单位】华南理工大学电子与信息学院,广东广州510640
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种改进的医学图像目标轮廓跟踪算法 [J], 王金川;黄雪梅;郝园
2.一种新的主动轮廓线跟踪算法 [J], 杨杨;张田文
3.一种新的二值图像目标轮廓跟踪算法 [J], 周丰乐;徐向民;肖跃;周娇
4.一种新的外耳轮廓跟踪算法 [J], 苑玮琦;卢曼慧
5.一种新的行人多目标跟踪算法 [J], 樊璐;张轶
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Байду номын сангаас
灰度级切片法二值化
如下图所示,将输入图像的某一灰度级范 围内的所有像素全部置为0(黑),其余 灰度级的所有像素全部置为255(白), 则生成黑白二值图像。
《遥感数字图像处理》实验课六
图像的二值化和轮廓跟踪
实验内容
实现图像的二值化处理。
对一幅二值图像实现图像的轮廓跟踪。 (选作)
图像的二值化
二值化就是将原来的灰度图像转换成只有 黑和白两种颜色的图像。
图像的二值化
利用灰度图像直方图阈值二值化 灰度级切片法二值化 等灰度片法二值化
利用灰度图像直方图阈值二值化
0 输出
255 0
L
W 输入灰度 255
等灰度片法二值化
将输入图像在某两个等宽的灰度级范围内 的所有像素全部置为0(黑),其余灰度 级的所有像素全部置为255(白),则生 成黑白二值图像。
0 输出
255 0
L
W 输入灰度
L
W 255
编程实现图像的二值化
要求:在灰度图像直方图阈值法、灰度级切片法、等灰度片法二值化方法中选择 一种,对一幅给定图像进行二值化。 * 函数名称: * ThresholdDIB() * * 参数: * LPSTR lpDIBBits - 指向源DIB图像指针 * LONG lWidth - 源图像宽度(象素数) * LONG lHeight - 源图像高度(象素数) * * 返回值: * BOOL - 运算成功返回TRUE,否则返回FALSE。 * * 说明: * 该函数用于对图像进行二值化。
轮廓跟踪的基本步骤
1、边界提取 2、边界跟踪
边界提取
二值图像边界提取算法就是掏空内部点:如果 原图中有一点为黑,且它的8个相邻点都是黑 色时,则将该点删除。
边界提取效果
边界跟踪
跟踪准则:从第一个边界点开始,定义初始的搜索方向为沿 左上方;如果上方的点是黑点,则为边界点,否则搜索方向 为顺时针旋转45度。这样一直到寻找到第一个黑点为止。然 后把这个黑点作为新的边界点,在当前的搜索方向的基础上 逆时针旋转90度,继续用同样的方法搜索下一个黑点,直到 返回最初的边界点为止。
按照上述定义可以编制程序进行轮廓跟踪
开始 初始化 按照初始搜索 方向跟踪边缘 判断 N 当前点是否与初始 点重合? 结束
Y