仓库模拟仿真说明
仓库模拟仿真说明教学内容
乐龙软件由日本人工智能服务有限公司开发,完全中文化界面,点击按钮即可在三维立体画面上显示出的对象物体,通过对这些对象物体的配置来进行设计,对各个对象物体的形状和规格,即使在仿真执行中也很容易可设置其属性。
可以非常直观且简单的建模。
由于仿真结果以动作日志形式排出,所以可以自由进行分析。
用户独创性机器设备可以与模型整合。
人工作业功能的作业管理器也可以说是杰作,如,对于“分拣、验货、包装、搬运”等一系列作业,用户既可以让多数人来分担,又可以使工人互相协助;或设定作业优先度等。
仅仅在选用内设菜单选项即可简单完成这些复杂的作业运行,不需要任何复杂编程,且附带有能自动生成最短行进路径的智能化功能,比如,只要给出存货位置数据和分拣指令,作业员就会走向指令产品的放置位置去拣货。
即使货位数据当场发生变化,作业员也能立即去适应,当布局和货位每发生变化时,行走路径的设置上不必花费太多时间就能极其简单地进行多方面的验证。
基于此功能,也可以在没有传送带和自动立体仓库等机器设备的平置型仓库的人员模拟操作中灵活使用,其效果极好。
产品介绍“RaLC(乐龙)”系列软件,是日本AIS 公司以谁都可以通过简单的操作就能构筑可在电脑上运行的三维立体模型物流中心为目标,独立研发而成的三维虚拟物流中心模型构筑工具。
“RaLC(乐龙)”,该名称是从意为“可迅速开发(建模)”的“Rapid”中取了前两位字母“Ra”,并由于该软件专门针对物流中心,所以又从“Logis tics Center”中取出“LC”两个字母组合而成。
即“RaLC = Rapid Virtual M odel Builder For Logistics Center Verification.”顾名思义,这是一套迅速构筑三维动画物流中心模型的系列工具软件总称。
中文音译名称便成为“乐龙”。
乐龙系列软件是在电脑中建立三维立体动画物流中心模型,以进行各种工程验证操作为目的的模型构筑工具软件。
ExtendSim 仓库仿真说明
ExtendSim 仿真软件
◆美国Imagine That, Inc. 开发的优秀通用仿真平台
◆经济、方便、功能强大、建模离散、连续和流体系统(和DCS接口)
◆开放源代码,集成开发环境(IDE),可扩展性在仿真软件中领先
◆学习周期短,适合教学、研究和企业咨询
◆全球用户超过13,000,有十多家企业以它为平台开发商业仿真系统
◆1000多内嵌函数,100多个预制模块,20多种随机数发生和拟和器
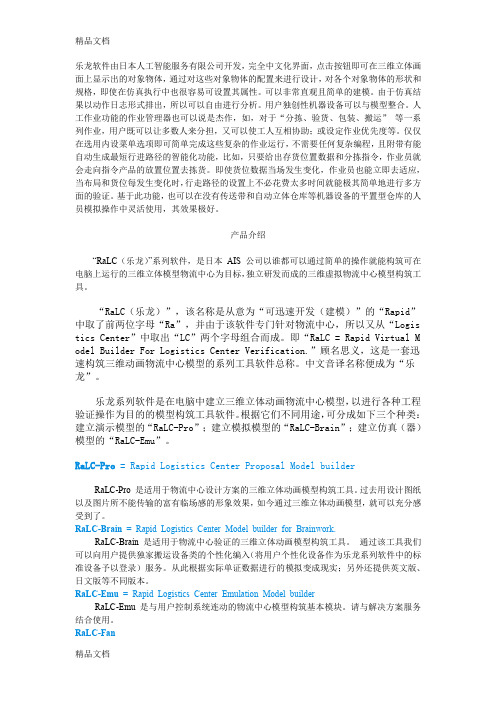
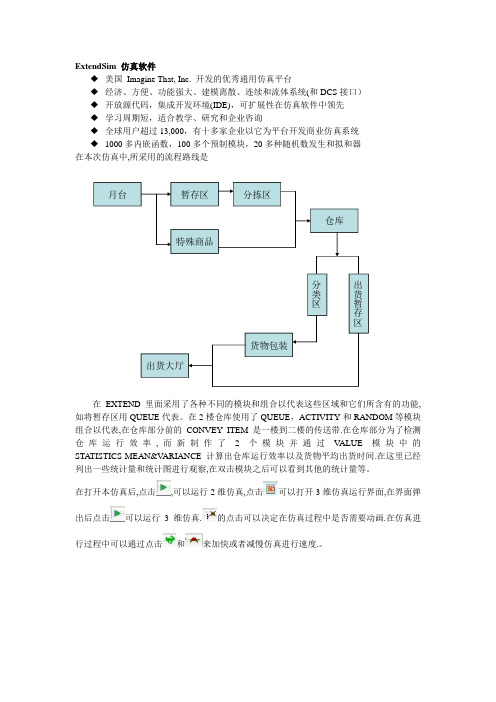
在本次仿真中,所采用的流程路线是
STA TISTICS-MEAN&V ARIANCE计算出仓库运行效率以及货物平均出货时间.在这里已经列出一些统计量和统计图进行观察,在双击模块之后可以看到其他的统计量等。
在打开本仿真后,点击,可以运行2维仿真,点击可以打开3维仿真运行界面,在界面弹出后点击可以运行3维仿真.的点击可以决定在仿真过程中是否需要动画.在仿真进行过程中可以通过点击和来加快或者减慢仿真进行速度.。
仓库模拟仿真说明
”乐龙软件由日本人工智能服务有限公司开发,完全中文化界面,点击按钮即可在三维立体 画面上显示出的对象物体,通过对这些对象物体的配置来进行设计,对各个对象物体的形 状和规格,即使在仿真执行中也很容易可设置其属性。
可以非常直观且简单的建模。
由于 仿真结果以动作日志形式排出,所以可以自由进行分析。
用户独创性机器设备可以与模型 整合。
人工作业功能的作业管理器也可以说是杰作,如,对于“分拣、验货、包装、搬运” 等一系列作业,用户既可以让多数人来分担,又可以使工人互相协助;或设定作业优先度 等。
仅仅在选用内设菜单选项即可简单完成这些复杂的作业运行,不需要任何复杂编程, 且附带有能自动生成最短行进路径的智能化功能,比如,只要给出存货位置数据和分拣指 令,作业员就会走向指令产品的放置位置去拣货。
即使货位数据当场发生变化,作业员也 能立即去适应,当布局和货位每发生变化时,行走路径的设置上不必花费太多时间就能极 其简单地进行多方面的验证。
基于此功能,也可以在没有传送带和自动立体仓库等机器设 备的平置型仓库的人员模拟操作中灵活使用,其效果极好。
产品介绍“RaLC (乐龙)系列软件,是日本 AIS 公司以谁都可以通过简单的操作就能构筑可在 电脑上运行的三维立体模型物流中心为目标,独立研发而成的三维虚拟物流中心模型构筑 工具。
“RaLC(乐龙)”,该名称是从意为“可迅速开发(建模)”的“Rapid” 中取了前两位字母“Ra”,并由于该软件专门针对物流中心,所以又从“Logis tics Center”中取出“LC”两个字母组合而成。
即“RaLC = Rapid Virtual M odel Builder For Logistics Center Verification.”顾名思义,这是一套迅 速构筑三维动画物流中心模型的系列工具软件总称。
中文音译名称便成为“乐 龙”。
乐龙系列软件是在电脑中建立三维立体动画物流中心模型,以进行各种工 程验证操作为目的的模型构筑工具软件。
物流仓储系统仿真实验报告
物流仓储系统仿真实验报告实验十物流仓储系统仿真实验一、实验目的1、学习、掌握Witness仿真软件的使用与主要功能;2、学习使用Witness仿真软件来建立物流仓储系统仿真模型的基本方法;3、进一步领会物流仓储系统的组成与功能。
二、实验内容及原理:运用WITNESS仿真软件系统建立一个由四组货架、两台堆垛机以及出入货输送链等组成的仿真模型,实验模型的总体布局如下图所示。
通过运行模型来模拟物流仓储系统的收货和存货过程。
实验模型中,以标准托盘pallet代表所有要进入库房储存的物料,pallet 以一定的批量和一定的间隔主动到达,通过入库站台一件一件地进入入库输送链,输送链通过两台缓冲器和两台堆垛机将物料随机地存入货架shelf 1- shelf4中的各个货位。
三、实验步骤1、元素定义(Define)元素定义表2、元素可视化(Dispaly)的设置3、各个元素细节(Dedail)设计(1)由于设定了material的最大数量,故模型在material进入一定数量达到会自动终止。
模型运行前后的截图如下:四. 实验结果:Track StatisticsReport by On Shift Time■aae■ E«pt| V Bus ■ Blocke|■o ・OTrackAl 49. 28 50. 38 0. 34 501 Track*2 50. 72 49. 18 0. 10 501 TrackBl 47. 17 52.69 0. 15 500 TrackB252. 8346. 330. 84499Part Statistics Report by On Shi ft TimeIo. Ent ereBo.ShippeBo.Scrappe No. Asse ・bledBo.Reject e W. I. F ・A VE W. I. P.A VETineSicaa Batincpallet2000193050 20001000. 04499786. 00. 00Conveyor Statistics Report by On Shift TimeVari able Statistics Report by On Shift TimeEase Indict < ------------ 1 --------Y&lue(1Talue(s)|total.stra 1 nwnbex^hct1000.Base1Eopty■ MoveVBlocked■ Queue■ BrokenHov OnTotal OnA VE Si zeA VETiae37. 003. 000. 000. 00 0. 00 02000 0. 03 15. 00 98. 501. 500. 000. 000. 000 10010. 0215. 00ConuEyorOCHConv«yor002:(1)计算material的平均入库时间。
仓库模拟仿真说明PDF.pdf

乐龙软件由日本人工智能服务有限公司开发,完全中文化界面,点击按钮即可在三维立体画面上显示出的对象物体,通过对这些对象物体的配置来进行设计,对各个对象物体的形状和规格,即使在仿真执行中也很容易可设置其属性。
可以非常直观且简单的建模。
由于仿真结果以动作日志形式排出,所以可以自由进行分析。
用户独创性机器设备可以与模型整合。
人工作业功能的作业管理器也可以说是杰作,如,对于“分拣、验货、包装、搬运”等一系列作业,用户既可以让多数人来分担,又可以使工人互相协助;或设定作业优先度等。
仅仅在选用内设菜单选项即可简单完成这些复杂的作业运行,不需要任何复杂编程,且附带有能自动生成最短行进路径的智能化功能,比如,只要给出存货位置数据和分拣指令,作业员就会走向指令产品的放置位置去拣货。
即使货位数据当场发生变化,作业员也能立即去适应,当布局和货位每发生变化时,行走路径的设置上不必花费太多时间就能极其简单地进行多方面的验证。
基于此功能,也可以在没有传送带和自动立体仓库等机器设备的平置型仓库的人员模拟操作中灵活使用,其效果极好。
产品介绍“RaLC(乐龙)”系列软件,是日本AIS 公司以谁都可以通过简单的操作就能构筑可在电脑上运行的三维立体模型物流中心为目标,独立研发而成的三维虚拟物流中心模型构筑工具。
“RaLC(乐龙)”,该名称是从意为“可迅速开发(建模)”的“Rapid”中取了前两位字母“Ra”,并由于该软件专门针对物流中心,所以又从“Logis tics Center”中取出“LC”两个字母组合而成。
即“RaLC = Rapid Virtual M odel Builder For Logistics Center Verification.”顾名思义,这是一套迅速构筑三维动画物流中心模型的系列工具软件总称。
中文音译名称便成为“乐龙”。
乐龙系列软件是在电脑中建立三维立体动画物流中心模型,以进行各种工程验证操作为目的的模型构筑工具软件。
库存仿真模拟实验报告

因此,企业必须使物流配送中心尽量规避库存量过大或过小的情况发生,采用合理有效的订货策略进行库存管理和控制,使企业的库存成本和生产成本降低,同时在保证企业生产、经营需求的前提下,使库存保持在合理的水平之上,把握库存动态,适时适量提出订货,避免过量存储或缺货,减少库存空间占用,降低库存总费用,控制库存资金占用,加速资金周转。这对提高企业的竞争力具有十分重要的作用。
8、期末库存量:期初库存量+到货量与需求量进行比较。若期初库存量+到货量大于需求量,则期末库存量为期初库存量+到货量减去需求量;否则为0。
9、缺货数量:期初库存量+到货量与需求量进行比较。若期初库存量+到货量大于或等于需求量,则缺货数量为0;否则为需求量减去期初库存量+到货量。
10、期末存货量:期末存货量=期末库存量+在途量。
单元格
公式与函数
备注
C15
0
C16
=L15
期初
C17
=SUM(L15: L16)
C18
=SUM(L15: L17)
C19
=IF(L15*M15>=4,1,0)+SUM(L16:L18)
C20
=IF(L15*M15>=5,1,0)+IF(L16*M16>=4,1,0)+SUM(L17:L19)
C21
=IF(L15*M15>=6,1,0)+IF(L16*M16>=5,1,0)+IF(L17*M17>=4,1,0 )+SUM(L18:L20)
ch5仓储系统仿真讲解

第五章 仓储系统仿真
5.1 仓库基本知识
1. 货物堆垛方式 ➢ 货物自身堆垛 ➢ 货架堆垛
2
5.1 仓库基本知识
2. 货物作业方式(堆垛环节)
➢ 人工 ➢ 叉车 ➢ (有轨)巷道式
堆垛机
5.1 仓库基本知识
2. 货物作业方式(堆垛环节) ——叉车
➢ 平衡重式叉车 ➢ 插腿式叉车 ➢ VNA(Very Narrow
5.2 仓储系统仿真
5. 合成器与分解器
✓ 合成器有三种操作模式:打包、装箱与批处理。 ✓ 1)打包: 在此模式下,合成器将从输入端口2与更高序号
的输入端口接收到的所有临时实体全部移入到由输入端 口1接收的临时实体中,然后释放。 ✓ 2)装箱: 在此模式下,除了从输入端口1接收到的那个临 时实体外,合成器将破坏掉其余所有的临时实体。 ✓ 3)批处理: 在此模式下,当收集了一批临时实体并执行 了预置和加工操作后就释放所有临模型中行进通过的多个临时实体组合在 一起。它可以将临时实体永久地合成在一起,也可以 将它们打包,在以后某个时间点上还可以再将它们分 离出来。
✓ 分解器用来将一个临时实体分成几个部分。分离可以 通过拆分一个由合成器装盘的临时实体,或者复制原 始实体的多个复本来实现。在处理时间完成后进行分 解/拆盘。
10
5.2 仓储系统仿真
3. 升降机
✓ 一种可上下运输移动临时实体的特殊运输机。它自动移 动到需要捡取或放下临时实体的高度。
✓ 详细说明:该垂直起重设备是任务执行器的一个子类。 它只执行偏移位置的z轴方向的偏移量来实现偏移行进。 在移出或移入升降机时,临时实体沿升降机的x轴向运动。
11
5.2 仓储系统仿真
• 路径1:原料A经过S形输送机到达码盘区,由机器人进行 码盘作业(每8份码一个托盘),并经过后续的输送机运 送到自动库的入库平台,由堆垛机完成入库。
《仓库模拟仿真实践》实验教学大纲

《仓库模拟仿真实践》实验教学大纲课程代码:ABGS0820课程中文名称:仓库模拟仿真实践课程英文名称:Warehouse simulati on practice课程学分数:2 课程学时数:2周授课对象:物流管理本科专业本课程的前导课程:企业物流管理、运筹学、库存控制和仓储管理一、实验课程简介(目的与任务)《仓库模拟仿真实践》作为课程实践性环节之一,在物流管理专业的培养计划中,它是一门具有较强专业技术特点的实践课程,是教学过程中必不可少的重要内容。
通过计算机仿真实践,使学生加深理解、验证巩固仓储系统课堂教学内容;增强课程的感性认识;掌握现代物流配送中心的作业与管理的方法,培养学生理论与实践相结合的能力。
《仓库模拟仿真实践》是一门培养学生掌握物流仓储与配送的理论与方法的实践课程,它要求学生具有较强的动手实践能力。
在实践能力方面着重培养软件使用动手能力、系统设计理论联系实际能力的训练。
实践课程不同于理论课程,应充分体现“教师指导下的以学生为中心”的教学模式,以学生为认知主体,充分调动学生的积极性和能动性,重视学生自学能力的培养的基本任务。
二、实验项目的设置与要求(二)实验项目的目的和要求1、通过型物流中心的模型构筑实验实验项目名称:通过型物流中心的模型构筑内容提要:通过型物流中心是指进货后不经入库储存直接按店铺分类后出货的物流中心;通过型物流中心的例子来学习利用部件生成器、传送带(直线、分流、弯曲)、部件消灭器、作业员、笼车等来构筑模型的方法。
实验目的:完成模型的构建,并实现相应的功能。
教学方法与手段:多媒体模型演示与设计实验要求:要做成使 4 种商品从投放口开始在传送带上流动,在分流点根据商品的种类进行分门别类使其按不同分流口流出后作业员把商品装入笼车的模型。
2、仓储型物流中心的仿真实验实验项目名称:仓储型物流中心的仿真内容提要:仓储型物流中心是指将进货的商品临时保存在仓库中,然后根据需要出库的物流中心。
仓储仿真搭建报告
仓储仿真搭建报告一、引言仓储仿真是指通过计算机技术,模拟和模仿实际仓储系统的运行过程,以便于测试和改进仓储系统的效率和性能。
本文档将详细介绍仓储仿真的搭建过程,包括搭建环境、建模过程、仿真实验和结果分析等内容。
二、搭建环境2.1 硬件要求•计算机:Intel Core i5以上处理器、8GB以上内存•存储空间:100GB以上•显卡:NVIDIA GeForce GTX 1060以上•其他:鼠标、键盘、显示器等2.2 软件要求•操作系统:Windows 10•开发环境:Python 3.7以上•仿真工具:SimPy三、建模过程3.1 定义仓储系统的实体在仓储仿真中,我们首先需要定义仓储系统中的实体,包括仓库、货物、搬运工等。
通过定义这些实体,我们可以更好地模拟仓储系统的运行过程。
class Warehouse:def __init__(self, name, capacity): = nameself.capacity = capacityself.storage = 0def increase_storage(self, amount):self.storage += amountdef decrease_storage(self, amount):self.storage -= amountclass Goods:def __init__(self, name, weight): = nameself.weight = weightclass Worker:def __init__(self, name): = name3.2 定义仓储系统的行为在建模过程中,我们还需要定义仓储系统中的行为,包括入库、出库、搬运等操作。
通过定义这些行为,我们可以更好地模拟仓储系统的运行流程。
def store_goods(env, warehouse, goods):print(f'搬运工将货物 {} 入库')warehouse.increase_storage(goods.weight)yield env.timeout(1)print(f'货物 {} 入库完成')def retrieve_goods(env, warehouse, goods):print(f'搬运工将货物 {} 出库')warehouse.decrease_storage(goods.weight)yield env.timeout(1)print(f'货物 {} 出库完成')def worker_action(env, warehouse, worker, goods, action):if action == 'store':yield env.process(store_goods(env, warehouse, goods))elif action == 'retrieve':yield env.process(retrieve_goods(env, warehouse, goods))3.3 定义仓储系统的仿真过程在搭建仓储仿真系统时,我们需要定义仓储系统的仿真过程。
库存仿真算法实验报告(3篇)

第1篇一、实验背景随着市场经济的快速发展,企业对库存管理的需求日益增长。
合理的库存管理可以降低库存成本,提高企业竞争力。
库存仿真算法作为一种有效的库存管理方法,近年来受到了广泛关注。
本实验旨在通过对库存仿真算法的研究和实际应用,验证其有效性,为企业的库存管理提供理论依据。
二、实验目的1. 了解库存仿真算法的基本原理和方法;2. 分析不同库存仿真算法的优缺点;3. 通过实际应用,验证库存仿真算法的有效性;4. 为企业库存管理提供理论指导。
三、实验内容1. 库存仿真算法原理及方法(1)库存仿真算法的基本原理:库存仿真算法通过模拟实际库存系统的运行过程,对库存需求、供应、采购、销售等方面进行仿真,从而得到库存管理决策的优化方案。
(2)库存仿真算法的方法:主要包括蒙特卡洛方法、离散事件仿真、系统动力学仿真等。
2. 库存仿真算法应用(1)选择合适的企业作为研究对象,收集相关数据,包括产品销售量、采购价格、库存成本等。
(2)根据实际需求,选择合适的库存仿真算法进行仿真实验。
(3)通过仿真实验,分析不同库存策略下的库存成本、服务水平等指标。
四、实验步骤1. 确定实验参数:根据实际需求,确定仿真实验的参数,如产品种类、需求量、采购价格、库存成本等。
2. 选择仿真算法:根据实验参数和实际需求,选择合适的库存仿真算法。
3. 设计仿真模型:根据所选算法,设计仿真模型,包括库存需求、供应、采购、销售等方面的模块。
4. 编写仿真程序:根据仿真模型,编写仿真程序,实现库存仿真算法。
5. 运行仿真实验:运行仿真程序,进行库存仿真实验。
6. 分析仿真结果:对仿真结果进行分析,比较不同库存策略下的库存成本、服务水平等指标。
7. 优化库存策略:根据仿真结果,对库存策略进行优化,提高库存管理水平。
五、实验结果与分析1. 仿真结果通过仿真实验,得到不同库存策略下的库存成本、服务水平等指标,具体如下:(1)经济批量订货策略(EOQ):库存成本最低,服务水平一般。
立体仓库flexsim仿真模拟

立体仓库仿真模拟业务流程描述某仓储企业欲新建一个立体仓库,仓库长80米,宽50米,高20米,占地面积为4000平方米。
企业与客户预签订了仓储外包合同,仓库建成后,客户将按合同定时定量进行送货,按市场需求不定期取货,并支付货物装卸费和仓储管理费。
立体仓库的基本业务流程如下:客户需要仓库存储4种不同类型的货物,类型分别为1,2,3,4。
其中1,2种货物为小型包装货物;3,4种为大型包装货物。
每天客户按照约定在不同的时间将不同类型的整车货物运抵仓库卸货口,货物均为单个包装运输(非托盘化运输),仓库负责卸货(人工或叉车),并将货物堆放在某个临时存储区等待入库。
入库前所有货物需要进行验货并贴条形码标签,由验货标签设备一次性完成。
验货标签设备分为两种:小型设备和大型设备,前者用于小型货物的验货和贴条形码标签;后者用于大型货物的验货和贴条形码标签。
由于1,2种货物为小型货物,验货后还需要码放在托盘上才能入库,这种处理由托盘码放设备完成。
完成码放后,货物与托盘一并入库(巷道堆垛机或叉车),每托盘货物占用一个货位。
3,4种货物可直接入库(巷道堆垛机或叉车),每件货物占用一个货位。
每个货架只能存储一种类型的货物。
货物的出库由市场需求决定,每个货物的库存时间平均为一天,且符合正态分布。
出库的货物堆放在某个临时存储区,仓库负责进行装货(人工或叉车),其中1,2种货物进行托盘化搬运和装货。
客户送货与发货时刻:客户的送货车辆每次只能在仓库停留15分钟,要求仓库对于任意货物的卸货时间不超过15分钟。
(代表车厢的暂存区实体最大停留时间stats_staytimemax小于等于900秒)送货时刻与送货数量如下表:客户的接货车辆每天按照一定时间到达仓库发货区(详见发货时间表),客户要求的装货时间也不超过15分钟。
(通过控制发货暂存区的输出流来实现)仿真时间假定仓库每天运转10小时,上午8:00到下午18:00,每天的运营时间为36000秒,一周运营时间为252000秒。
仓库模拟仿真说明
乐龙软件由日本人工智能服务有限公司开发,完全中文化界面,点击按钮即可在三维立体画面上显示出的对象物体,通过对这些对象物体的配置来进行设计,对各个对象物体的形状和规格,即使在仿真执行中也很容易可设置其属性。
可以非常直观且简单的建模。
由于仿真结果以动作日志形式排出,所以可以自由进行分析。
用户独创性机器设备可以与模型整合。
人工作业功能的作业管理器也可以说是杰作,如,对于“分拣、验货、包装、搬运”等一系列作业,用户既可以让多数人来分担,又可以使工人互相协助;或设定作业优先度等。
仅仅在选用内设菜单选项即可简单完成这些复杂的作业运行,不需要任何复杂编程,且附带有能自动生成最短行进路径的智能化功能,比如,只要给出存货位置数据和分拣指令,作业员就会走向指令产品的放置位置去拣货。
即使货位数据当场发生变化,作业员也能立即去适应,当布局和货位每发生变化时,行走路径的设置上不必花费太多时间就能极其简单地进行多方面的验证。
基于此功能,也可以在没有传送带和自动立体仓库等机器设备的平置型仓库的人员模拟操作中灵活使用,其效果极好。
产品介绍“RaLC(乐龙)”系列软件,是日本AIS 公司以谁都可以通过简单的操作就能构筑可在电脑上运行的三维立体模型物流中心为目标,独立研发而成的三维虚拟物流中心模型构筑工具。
“RaLC(乐龙)”,该名称是从意为“可迅速开发(建模)”的“Rapid”中取了前两位字母“Ra”,并由于该软件专门针对物流中心,所以又从“Logis tics Center”中取出“LC”两个字母组合而成。
即“RaLC = Rapid Virtual M odel Builder For Logistics Center Verification.”顾名思义,这是一套迅速构筑三维动画物流中心模型的系列工具软件总称。
中文音译名称便成为“乐龙”。
乐龙系列软件是在电脑中建立三维立体动画物流中心模型,以进行各种工程验证操作为目的的模型构筑工具软件。
实验07 库存系统的仿真

实验07.库存系统的仿真实验目的:1.了解库存系统问题;2.掌握随机事件的计算机仿真方法。
实验内容:1.某仓库的最大库存水平为=11(单位),订货周期= 5(天),每天需求的单位数是随机变量。
数据如下表:另外仓库的订货一般必须提前时间(即从订货到货物到达),这个提前时间也是随机变量。
数据如下表:设开始库存量为3个单位,并订货8个单位,安排在2天内到达。
每个周期的第5天订一次货使得库存量达到11个单位。
1) 编写对这个库存系统前5个周期进行仿真的M文件;2) 运用编写的M文件对该库存系统进行仿真,求出每天库存量的平均水平及缺货天数所占的比例;3) 检查仿真所得结果的可靠性;4) 若订货单价为c=1万元/单位,需求单价为p=2万元/单位,库存费每天w=0.1万元/单位,缺货罚款为每天0.2万元/单位。
进行库存系统仿真,计算5个周期后的总利润。
2. 某自行车商店的仓库保管人员采用一种简单的库存策略。
当库存量降低到P 辆时,就向生产厂订货,订货量为Q。
如果某一天需求量超过库存量,将对商店造成损失(利润损失、信誉损失等);库存量太多,又造成资金积压,保管费增多。
因此希望选择一种合适的库存策略,使总管理费用最少。
现给出5种策略(以下数据单位为辆):(1) P=125,Q=150;(2) P=125,Q=250;(3) P=150,Q=250;(4) P=175,Q=250;(5) P=175,Q=300。
已知初始库存S=115(辆),从每次订货至到货需3天(延迟时间),保管费为0.75元/辆,缺货损失为1.8元/辆,每次需订货费为75元,需求量为0~99之间的均匀分布。
假定第一天没有订货。
考察每天仓库的货物(自行车)变化情况,仿真150天,比较这5种策略,找出最优的一种。
实验仪器与软件:1.CPU主频在2GHz以上,内存在512Mb以上的PC;2.Matlab 2010a及以上版本。
实验讲评:实验成绩:评阅教师:20 年月日实验07.库存系统的仿真一、第1题的仿真1) 仿真程序function y=Fangzhen(Z,D,M,K)Rout=round(rand(Z,D)*100);Rin=round(rand(Z+1,1)*10);kucun=K;InAmount=M-K;T(9)=In(Rin(1));T(2)=kucun;for i=1:Zfor j=1:Dm=(i-1)*Z+j;T(1)=j; T(3)=Rout(i,j); T(4)=Out(Rout(i,j)); T(7)=-1;T(8)=-1;if m>1if T0(9)>=0T(9)=T0(9)-1;elseT(9)=-1;end;if T0(9)==0kucun=kucun+InAmount;T(2)=kucun;elseT(2)=T0(5);end;end;kucun=kucun-T(4);if kucun<0T(5)=0;T(6)=-1*kucun;elseT(5)=kucun;T(6)=0;end;if j==DInAmount=M-kucun;T(7)=InAmount;T(8)=Rin(i+1);T(9)=In(Rin(i+1));endfor a=1:9A(j,a)=T(a);endT0=T;T=[];endy(:,:,i)=A;A=[];endfunction y=Out(r)if r>=1 & r<=10y=0;elseif r>=11 & r<=35 y=1;elseif r>=36 & r<=70 y=2;elseif r>=71 & r<=91 y=3;elsey=4;endfunction y=In(r)if r>=1 & r<=6y=1;elseif r>=7 & r<=9y=2;elsey=3;end2) 仿真实验Fangzhen(5,5,11,3) 运行结果如下:3) 仿真结果分析根据这10个星期的仿真,得到结论:平均每天库存为“剩余库存量”列上的数字之和除以天数,即67 / 50=1.34(单位)而50天中有16天可能缺货。
河北快运仓库Flexsim仿真设计说明书 物流设计大赛作品
图 5.3 一楼货架规格设定
5
图 5.4 二层货架规格设定
图 5.5 二楼货架容量设定
5.3 运输工具及货梯参数设置
根据设计方案,叉车每次只能运输一个托盘的货物,平板车最多只能搬运 6 箱货物,货梯的最大载重量为 2 个托盘货物重量,如图 5.6、图 5.7、图 5.8 所示。
五、具体仿真步骤
考虑知识产权及著作权问题,我们在此设计说明书里,仅列出各环节部分具 有代表性的实体进行参数设置说明。
5.1 建立实体关系
根据仓库各实体之间的关系,我们建立实体连接如图 5.1 连线图所示。
图 5.1 实体连线图
4
5.2 托盘货架参数设置
根据设计方案,仓库一楼共有货架 18 个,规格 13 列*5 层,容量为 65 格; 二楼共有货架 37 个,规格 16 列*5 层,容量为 80 格。具体参数设定如图 5.2、 图 5.3、图 5.4、图 5.5 所示。
图 5.12 戴娜出库车辆装货相关参数设定
10
图 5.13 多利亚入库车辆卸货相关参数设定 图 5.14 多利亚入库车辆卸货相关参数设定
11
图 5.15 多利亚入库车辆参数设定部分代码
图 5.16 退货货物产生器参数设定
12
为了对整个仓库各类货物的流动有更为直观的认识,我们对各类货物时行了 颜色设定,其中爱妮莎规格货物为红色,多利亚规格货物为绿色,戴娜规格货物 为蓝色,退货类货物为黄色,具体参数设定如图 5.17 所41
17
46
1
2
1
2
退货 20 50
21
55
1
2
1
2
合计 420 1050 420
仓储仿真系统实验报告(3篇)

第1篇一、实验目的本次实验旨在通过使用仓储仿真系统,深入了解仓储物流系统的运作原理,掌握仓储仿真软件的基本操作方法,并通过对实际仓储物流系统的仿真分析,优化仓储物流流程,提高仓储效率。
二、实验内容1. 系统概述本次实验所使用的仓储仿真系统为XX公司研发的仓储仿真软件,该系统具备以下功能:- 3D可视化展示:可直观地展示仓储物流系统的布局、设备、货物等信息;- 模拟仿真:可模拟不同场景下的仓储物流系统运作,包括入库、出库、存储、搬运等;- 数据分析:可对仿真结果进行数据分析,包括作业时间、效率、成本等;- 优化方案:可针对仿真结果提出优化方案,提高仓储物流系统效率。
2. 实验步骤(1)系统初始化:启动仓储仿真系统,导入实际仓储物流系统模型。
(2)系统设置:根据实际需求,设置仿真参数,如货物种类、数量、设备类型、操作人员等。
(3)仿真运行:启动仿真,观察仓储物流系统运行过程,记录相关数据。
(4)数据分析:对仿真结果进行分析,评估仓储物流系统性能。
(5)优化方案:根据仿真结果,提出优化方案,如调整设备布局、优化作业流程等。
3. 实验结果与分析(1)系统运行情况:通过仿真实验,发现以下问题:- 入库作业时间过长:由于入库口设置不合理,导致入库作业效率低下;- 出库作业效率低:由于出库作业流程复杂,导致出库作业效率低;- 库存空间利用率不高:部分区域库存空间未被充分利用。
(2)数据分析:- 入库作业时间:仿真结果显示,入库作业时间较实际运行时间缩短了20%;- 出库作业效率:仿真结果显示,出库作业效率提高了15%;- 库存空间利用率:仿真结果显示,库存空间利用率提高了10%。
(3)优化方案:- 调整入库口位置,缩短入库作业时间;- 简化出库作业流程,提高出库作业效率;- 优化库存空间布局,提高库存空间利用率。
三、实验结论通过本次实验,我们掌握了仓储仿真系统的基本操作方法,并通过对实际仓储物流系统的仿真分析,提出了优化方案,提高了仓储物流系统效率。
仓库模拟仿真说明
乐龙软件由日本人工智能服务有限公司开发,完全中文化界面,点击按钮即可在三维立体画面上显示出的对象物体,通过对这些对象物体的配置来进行设计,对各个对象物体的形状和规格,即使在仿真执行中也很容易可设置其属性。
可以非常直观且简单的建模。
由于仿真结果以动作日志形式排出,所以可以自由进行分析。
用户独创性机器设备可以与模型整合。
人工作业功能的作业管理器也可以说是杰作,如,对于“分拣、验货、包装、搬运”等一系列作业,用户既可以让多数人来分担,又可以使工人互相协助;或设定作业优先度等。
仅仅在选用内设菜单选项即可简单完成这些复杂的作业运行,不需要任何复杂编程,且附带有能自动生成最短行进路径的智能化功能,比如,只要给出存货位置数据和分拣指令,作业员就会走向指令产品的放置位置去拣货。
即使货位数据当场发生变化,作业员也能立即去适应,当布局和货位每发生变化时,行走路径的设置上不必花费太多时间就能极其简单地进行多方面的验证。
基于此功能,也可以在没有传送带和自动立体仓库等机器设备的平置型仓库的人员模拟操作中灵活使用,其效果极好。
产品介绍“RaLC(乐龙)”系列软件,是日本AIS 公司以谁都可以通过简单的操作就能构筑可在电脑上运行的三维立体模型物流中心为目标,独立研发而成的三维虚拟物流中心模型构筑工具。
“RaLC(乐龙)”,该名称是从意为“可迅速开发(建模)”的“Rapid”中取了前两位字母“Ra”,并由于该软件专门针对物流中心,所以又从“Logis tics Center”中取出“LC”两个字母组合而成。
即“RaLC = Rapid Virtual M odel Builder For Logistics Center Verification.”顾名思义,这是一套迅速构筑三维动画物流中心模型的系列工具软件总称。
中文音译名称便成为“乐龙”。
乐龙系列软件是在电脑中建立三维立体动画物流中心模型,以进行各种工程验证操作为目的的模型构筑工具软件。
仓储中心仿真模拟实训

仓储中心仿真模拟实训(一)实训目的仓储型物流中心是指将进货的商品临时保存在仓库中,然后根据需要出库的物流中心。
本实训以仓储型物流中心的模型为例,学习自动立体仓库、装货中转站、卸货中转站、传送带(直角、合流)、机器人、托盘供给器等设备来建立模型的方法以及关于这些设备的设定方法。
要求学生根据现有的实验设备,自行设计实训方案,完成实训要求,达到实训目的。
(二)实训设备计算机:上海乐龙人工智能软件有限公司的RaLC-Pro(Rapid Logistics Center Proposal Model Builder)模型构筑软件。
(三)实训要求通过该软件建立具有自动立体仓库功能的出货传送线的模型。
从3处投入口进来的4种商品沿传送带流动,在合流点合流的商品在装货中转站由机器人堆放在托盘上,托盘经入库口被送入自动立体仓库。
存储在自动立体仓库中的托盘经出库口出库,在卸货中转站由作业员将商品卸下投放到分流线上去。
5课时(四)实训步骤1、自动化立体仓库的入库口的设置自动立体仓库的入库口是从外部将托盘送入自动立体仓库的入库路径。
选择自动立体仓库的弹出菜单中的﹝添加IO部件(In Mode)﹞,使入库口(In Mode)表示出来。
2、自动立体仓库的出库口(Out Mode)的设置自动立体仓库的出库口(Out Mode)是从自动立体仓库将托盘送出的出库路径。
选择自动立体仓库的弹出菜单中的﹝添加IO部件(Out Mode)﹞,使出库口(Out Mode)表示出来。
3、IO部件的移动点击工具栏中的﹝可移动子类设备﹞按钮。
(附带部件的移动)4、装货中转站的设置点击设备栏的﹝装货中转站﹞按钮,使装货中转站表示出来。
选择装货中转站的弹出菜单中的﹝逆时针旋转90度﹞改变其方向,使输入口的入口部分和装货中转站的出口部分自动连接上。
点击设备栏中的﹝托盘供给器﹞按钮,使托盘供给器表示出来。
托盘供给器可自动生成托盘。
将其设置在装货中转站的入口附近。
实验5 自动化仓储中心建模仿真
实验5 自动化仓储中心建模仿真1、学习内容与目的①学习如何使用发生器模拟多条生产线生产不同类型产品;②学习如何配置合成器参数;③学习如何配置传送机布局参数;④学习使用输送机送往端口时,如何Cases By Value进行产品输送到不同端口(或者使用拉动条件直接取货);⑤学习使用堆垛机及其参数设置;⑥学习入库,出库流程的定义(a,s连接);⑦学习使用货架参数的设置;⑧学习使用吸收器模拟货车。
2、问题描述与模型参数①三条生产线生产1,2,3三种不同类型的产品,三条生产线生产速度有以下两种方案:(1)产品1,3按照正态分布时间间隔到达(均值14,标准偏差5);产品2按照正态分布时间间隔达到(均值20,标准偏差5)。
产品颜色自定,要求三种产品不同。
(2)产品1,2,3都按照指数分布时间间隔到达(位置参数0,尺度参数6)②然后3种产品被分别送到三条传送带上,在传送带末端分别设置合成器进行产品的装盘,每类产品每盘都是4个。
托盘的到达时间间隔服从指数分布,位置参数0,尺度参数5③装盘完成后,送往共同的传送带(三种产品共用一条输送通道)运往巷道式立体货架,要求产品1送往第一个巷道式立体货架,产品2,3分别送往第2,3个巷道式立体货架。
货架传送带末端由堆垛机放到两排货架上;要求货物从第一行、第一列开始放置,最小停留时间服从指数分布(位置参数是0,尺度参数2000)。
④从货架取出的货物由传送带送到客户的货车上,要求产品1送第一个货车,产品2,3依次送往第2,3个货车。
仿真模型如下:3、问答题:(1)试分析两种生产线生产速度下堆垛机的利用率如何?采取哪种生产速度更加合理些?(2)如果产品装盘前需要检测,合格的产品进行装盘,然后入库,不合格的返修(合格率95%),试修改模型。
案例四-普通仓库设计仿真

案例四-普通仓库设计仿真案例四普通仓库设计仿真1.案例介绍1.1案例背景某公司要投建设一仓库,公司现有的商品分为三类:A类物品属于快速消费品,每月的进货量和出库量都比较大,该产品入库后通过仓库验货是否合格直接出库。
B、C类产品属于基本消费品,时常都有备货,以应对促销活动等,进出货量相对于A类产品就小的多,所以入库后必须上到货架进行储存。
1.2仓库建设要求及商品基本数据(1)仓库的建设要求入库时要按照托盘单元化。
A类产品一共分为3个批次进入仓库。
B、C类产品都是分为3个批次入库,订单达到时进行出库作业。
货品在仓库理货区进行检验,三类产品分别通过三个检验台进行检验。
A产品的合格率为95%;B产品的合格率为96%;C产品的合格率为97%。
不合货品直接进入退货区。
退货区没有最大容量限制。
仓库放宽比为1.1,每日日工作时间为3小时。
(2)商品基本数据收集①公司一个季度商品进出库数据如表1表1 商品一个季度进出库数据一月月累计出库量月累计入库量A 2790 3072B 825 1627C 1212 1611总计4827 6310二月月累计出库量月累计入库量A 2621 2480B 205 428C 131 152总计2967 3060三月月累计出库量月累计入库量A 2303 2373B 595 828C 490 666总计3288 3867(2)三类产品的规格如下:A产品规格400*400*400mm,重2.5kgB产品规格600*300*600mm,重1.5kgC产品规格300*500*200mm,重0.5kg1.3 案例要求本案例将结合公司提供的商品基本数据及仓库建设要求,对仓库进行总体布局设计和作业流程分析并通过科学的计算方法得出仓库的内部设计。
最后通过Flexism仿真软件模拟仓库的运行情况,对设计的方案进行仿真分析确定系统是否满足需求。
2.案例分析2.1仓库整体布局设计结合三类商品的出入库特点,A类产品不进行上货架直接出库,B、C产品入库量较小,在此采用U型设计对仓库进行总体布局。
立体仓库flexsim仿真模拟
立体仓库仿真模拟业务流程描述某仓储企业欲新建一个立体仓库,仓库长80米,宽50米,高20米,占地面积为4000平方米。
企业与客户预签订了仓储外包合同,仓库建成后,客户将按合同定时定量进行送货,按市场需求不定期取货,并支付货物装卸费和仓储管理费。
立体仓库的基本业务流程如下:客户需要仓库存储4种不同类型的货物,类型分别为1,2,3,4。
其中1,2种货物为小型包装货物;3,4种为大型包装货物。
每天客户按照约定在不同的时间将不同类型的整车货物运抵仓库卸货口,货物均为单个包装运输(非托盘化运输),仓库负责卸货(人工或叉车),并将货物堆放在某个临时存储区等待入库。
入库前所有货物需要进行验货并贴条形码标签,由验货标签设备一次性完成。
验货标签设备分为两种:小型设备和大型设备,前者用于小型货物的验货和贴条形码标签;后者用于大型货物的验货和贴条形码标签。
由于1,2种货物为小型货物,验货后还需要码放在托盘上才能入库,这种处理由托盘码放设备完成。
完成码放后,货物与托盘一并入库(巷道堆垛机或叉车),每托盘货物占用一个货位。
3,4种货物可直接入库(巷道堆垛机或叉车),每件货物占用一个货位。
每个货架只能存储一种类型的货物。
货物的出库由市场需求决定,每个货物的库存时间平均为一天,且符合正态分布。
出库的货物堆放在某个临时存储区,仓库负责进行装货(人工或叉车),其中1,2种货物进行托盘化搬运和装货。
客户送货与发货时刻:客户的送货车辆每次只能在仓库停留15分钟,要求仓库对于任意货物的卸货时间不超过15分钟。
(代表车厢的暂存区实体最大停留时间stats_staytimemax小于等于900秒)送货时刻与送货数量如下表:客户的接货车辆每天按照一定时间到达仓库发货区(详见发货时间表),客户要求的装货时间也不超过15分钟。
(通过控制发货暂存区的输出流来实现)仿真时间假定仓库每天运转10小时,上午8:00到下午18:00,每天的运营时间为36000秒,一周运营时间为252000秒。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
乐龙软件由日本人工智能服务有限公司开发,完全中文化界面,点击按钮即可在三维立体画面上显示出的对象物体,通过对这些对象物体的配置来进行设计,对各个对象物体的形状和规格,即使在仿真执行中也很容易可设置其属性。
可以非常直观且简单的建模。
由于仿真结果以动作日志形式排出,所以可以自由进行分析。
用户独创性机器设备可以与模型整合。
人工作业功能的作业管理器也可以说是杰作,如,对于“分拣、验货、包装、搬运”等一系列作业,用户既可以让多数人来分担,又可以使工人互相协助;或设定作业优先度等。
仅仅在选用内设菜单选项即可简单完成这些复杂的作业运行,不需要任何复杂编程,且附带有能自动生成最短行进路径的智能化功能,比如,只要给出存货位置数据和分拣指令,作业员就会走向指令产品的放置位置去拣货。
即使货位数据当场发生变化,作业员也能立即去适应,当布局和货位每发生变化时,行走路径的设置上不必花费太多时间就能极其简单地进行多方面的验证。
基于此功能,也可以在没有传送带和自动立体仓库等机器设备的平置型仓库的人员模拟操作中灵活使用,其效果极好。
产品介绍“RaLC(乐龙)”系列软件,是日本AIS 公司以谁都可以通过简单的操作就能构筑可在电脑上运行的三维立体模型物流中心为目标,独立研发而成的三维虚拟物流中心模型构筑工具。
“RaLC(乐龙)”,该名称是从意为“可迅速开发(建模)”的“Rapid”中取了前两位字母“Ra”,并由于该软件专门针对物流中心,所以又从“Logis tics Center”中取出“LC”两个字母组合而成。
即“RaLC = Rapid Virtual M odel Builder For Logistics Center Verification.”顾名思义,这是一套迅速构筑三维动画物流中心模型的系列工具软件总称。
中文音译名称便成为“乐龙”。
乐龙系列软件是在电脑中建立三维立体动画物流中心模型,以进行各种工程验证操作为目的的模型构筑工具软件。
根据它们不同用途,可分成如下三个种类:建立演示模型的“RaLC-Pro”;建立模拟模型的“RaLC-Brain”;建立仿真(器)模型的“RaLC-Emu”。
RaLC-Pro = Rapid Logistics Center Proposal Model builderRaLC-Pro 是适用于物流中心设计方案的三维立体动画模型构筑工具。
过去用设计图纸以及图片所不能传输的富有临场感的形象效果,如今通过三维立体动画模型,就可以充分感受到了。
RaLC-Brain= Rapid Logistics Center Model builder for Brainwork.RaLC-Brain 是适用于物流中心验证的三维立体动画模型构筑工具。
通过该工具我们可以向用户提供独家搬运设备类的个性化编入(将用户个性化设备作为乐龙系列软件中的标准设备予以登录)服务。
从此根据实际单证数据进行的模拟变成现实;另外还提供英文版、日文版等不同版本。
RaLC-Emu = Rapid Logistics Center Emulation Model builderRaLC-Emu 是与用户控制系统连动的物流中心模型构筑基本模块。
请与解决方案服务结合使用。
RaLC-FanRaLC-Fan 是建立没有使用许可证也可分发“RaLC”模型的工具。
备注:原始模型仍需使用“RaLC(乐龙)”系列软件制作。
RaLC仿真软件简介一、软件简介:RaLC系列仿真软件,是由日本人工智能服务株式会社独立开发的拥有自主知识产权的物流仿真软件。
RaLC系列仿真软件,集现代物流技术、人工智能、3D图像、数据处理和计算机仿真等技术为一体,专门服务于物流行业和工业工程领域,处于国际领先水平。
RaLC系列仿真软件,是专业面向物流的3D动画仿真软件系统,利用RaLC系列仿真软件可以把现有的或正在规划中的物流配送中心或工厂在计算机系统中建成虚拟的3D动画模型,以实现一种以3D动画为载体,集作业人员、搬运设备、货物、控制系统、数据信息合为一体的系统仿真平台,3D动画模型具体、形象、生动,可非常真实地表现整个物流系统,为物流中心的规划建设和改善提供有效的可视化手段。
RaLC系列仿真软件,采取模块化设计理念,注重数据分析,提供直观结果,以创作利润和产业化为根本目标。
软件具有易学易用、快速建模、专业实用、性价比高等特点。
RaLC系列仿真软件,易学易用,操作简单、模型建立快速便捷。
软件采用视窗操作、功能模块直接拖放使用,对使用者的计算机能力要求不太高,在短时间内就可熟练掌握。
二、软件客户:1、物流设备或系统集成:北京伍强科技、沈阳新松机器人自动化、上海博弈物流技术、上海冈村、苏州富士达、北京达特烟草、东莞威特隆、上海精星、南京六维、沈飞工业、浙江创联、上海大福自动化设备、上海太禾金属制造、台湾凡得、上海同悦(青岛同日机电)、北京时代联商、苏州广运自动化、上海埃福梯(AFT)、新众亚货架、上海威雅物流设备等。
2、物流企业或仿真项目:上海吉田拉链(YKK)、通用汽车、西门子工程自动化、东方远航、苏宁电器、上海可的、永乐、三一重工、蒙牛乳业、DHL、中远物流、上海世纪出版社、爱迪达斯、山东佳佳乐超市、九州通医药、日立建机(中国)等。
三、运行环境:系统配置: CPU奔腾Ⅲ 1.0GHz以上内存:512MB以上操作系统: Windows XP/2000/NT4.0显示器及分辨率: 16BIT High color以上,推荐1280X1024以上显卡:推荐独立显示卡,显存32MB以上鼠标:三键智能鼠标RaLC方针软件功能特点一、RaLC系列仿真软件功能汇总:1、运用标准化的基本模块,通过直接调整设备的规格、功能、运动、逻辑等技术参数,在不需编程的基础上快速建模,实现基本意义上的仿真和分析,且概念性的表达设计思想。
按照WMS系统原理,抽象运算物流数据,获取仿真结果,为管理、规划提供科学依据。
2、RaLC系列仿真软件,使用交互性强,即时修改即时模拟;能导入各种格式图片、DXF以及3DS文件;设计结果以图片、录像和特有可执行文件等形式展示;模块功能属性与现实设备对应,模型设备之间的逻辑关联建立快速;3D动画直观展现设备布局、人员器具配置、作业区分布及基本工作流程;基本商品数据的导入和特有可操控的全方位多视点展示结果的输出。
3、命令丰富、高度智能化的作业管理器模块,具备编辑作业人员作业内容、控制设备的复杂逻辑等强大功能,全面表现物流配送中心进货、入库、分类、拣选、加工、出库、运输等所有与货物处理相关的设备及人员的详细作业流程,作业人员具备障碍物绕行、自动识别最短路径、命令指示行动路线和实现多人协同工作的高度智能。
利用真实物流数据制作出商品、进货、入库、库存、拣选、分类、包装、补货、出库等一系列仿真数据文件来驱动模型,动态实现完整意义的仿真,再现物流场景。
商品信息管理文件包含名称、代码、包装形式、数量、货位、颜色、条码、配送路线、处理耗时等详细信息。
仿真产生详细的基础数据记录,分析获得直观的统计图表,能够为改善设备布局、人员配置、作业流程和提高系统效率提供根本依据。
二、RaLC系列仿真软件详细功能:1、功能组成:RaLC系列仿真软件中包含了仓库、配送中心的所有的设备。
不仅有普通仓库用到的:货架、叉车、手推车等常用设备;也有先进的自动智能设备:自动码垛机、AGV无人搬运车、自动轨道车、升降机、自动立体仓库、移动货架、旋转货架等百余种与现实物流环境相对应的物流设备模块,只需点击按钮就可以添加设备。
模型模块面向对象开发、各有与自身结构和功能特点相对应的参数属性表。
使用时只需按要求对其属性做相应调整即可,无需进行复杂编程。
2、建模方式:RaLC系列仿真软件采用视窗操作方式,物流设备及功能模块可直接点击按钮添加使用。
各个设备之间的逻辑关系可根据在设备上的货品流向方便地通过双击鼠标即可建立连接。
无需烦琐编程。
并且在建模过程中可随时根据需要,调整和修改设备参数。
另外,在完成的模型中还可以将具有个性化的设备组保存为设备库文件,便于灵活的多次调用。
3、人员动作的表现:在物流中心,设备的功能动作相对固定,比较容易模拟;但是,工作人员的动作及任务比较复杂,难以模拟;因此将工作人员丰富而复杂的动作和作业任务模拟出来是乐龙仿真软件的最大特色。
在乐龙软件中,定义了作业管理器这个虚拟的设备,并通过作业管理器与设备之间的连接,来实现了物流中心的工作。
按照不同的动作类别和工作内容,软件内置了300多条命令语句。
通过灵活的调用命令,可实现复杂的动作内容。
另外,软件中的作业员已具有高度的人工智能性,比如可识别动态中两位置之间的最短路径和避开障碍物。
4、物流设备功能:软件中的设备模块都是根据现实物流设备原形进行开发的。
都具有与真实物流设备相对应的功能。
并且可以通过模块自身的属性调整尺寸、颜色、形状以及机械参数等。
各个设备模块在建成仿真模型系统中,既在功能上有独立性,在逻辑连接上又有关联性;因而仿真模型系统中不同的设备或作业区域能够完成对相对独立的离散时间的处理。
从而能很好地表现物流配送中心的局部及整体的作业流程。
5、仿真数据驱:建立完成的仿真模型即可以实现生动形象的3D动画演示,更为重要的是能够利用接近现实的物流仿真数据直接驱动模型运做,形象地展现物流作业场景。
仿真数据涵盖了物流配送中心商品进货作业、商品进库作业、商品初始库存、商品拣选出库等作业内容。
6、数据记录特点:RaLC系列仿真软件采用日志文件方式,以秒为单位详细记录下仿真系统模型在运行过程中某一时刻,每个商品、每个设备以及每个工作人员运行情况的数据。
为后期的仿真分析提供了详细可靠的基础数据。
7、数据分析:RaLC系列仿真软件包带有仿真数据分析工具,通过解析模型日志,可以得到设备的能力图、作业时间分布图、作业内容分布图等数据图表。
以此反映物流配送中心的总体运行情况,为改善决策提供有力参考依据。
特别值得指出的是,RaLC系列仿真软件在对人员的工作情况分析上,可以详细划分人员的行为和工作结构。
从而可以改善作业人员的行为方式和工作方法。
8、软件图形接口:RaLC系列仿真软件,能够方便地从程序外部导入用AutoCAD、3DS Max、Photoshop等绘图软件绘制输出的3DS、DXF格式图形和BMP格式图像。
用以丰富模型的3D画面。
9、辅助工具:RaLC系列仿真软件包具有FAN可执行文件制作、AVI录像文件制作、BMP高像素(像素可调整)图片输出等功能。
可以方便地把建成的仿真模型制作成相应的文件,便于把模型公开展示。
说明:Fan可执行文件是可脱离RaLC系列仿真软件,独立执行的EXE文件。
Fan模型封装了设备的属性,不能修改。