UDEC4.0使用说明
停车场系统4.0使用说明书

停车场管理系统使用说明书停车场管理系统使用手册(V4.0)目录一、简介 -------------------------------------- 3二、系统拓朴图--------------------------------- 4三、系统安装----------------------------------- 53.1、设备安装位置管线图------------------------------ 5 3.2、道闸安装规范----------------------------------- 6 3.3、控制机安装规范 --------------------------------- 63.4、地感线圈施工规范 ------------------------------- 6四、系统功能----------------------------------- 9五、系统接线图-------------------------------- 11六、硬件功能设置------------------------------ 12七、软件使用说明------------------------------ 131、系统配置要求------------------------------------ 132、安装步骤:-------------------------------------- 13⑴数据库的安装:--------------------------------------------------------------------------13⑵系统管理软件的安装方法: -------------------------------------------------------------17⑶数据库的建立—软件自动创建: ------------------------------------------------------24⑷数据库的建立—在SQL数据库中手工创建:---------------------------------------253、管理软件的配置: -------------------------------- 30①软件狗的配置:--------------------------------------------------------------------------30②软件与数据库的连接配置:------------------------------------------------------------314、软件的启动与登陆: ------------------------------ 315、系统功能/模块----------------------------------- 336、使用前的操作说明 -------------------------------- 347、软件功能说明:---------------------------------- 38⑴IC卡管理(一卡通) -------------------------------------------------------------------38⑵ID卡管理(一卡通) -------------------------------------------------------------------40⑶查询报表 ----------------------------------------------------------------------------------41⑷监控管理 ----------------------------------------------------------------------------------43⑸联机操作 ----------------------------------------------------------------------------------48⑹IC卡管理 ---------------------------------------------------------------------------------52⑺查询报表 ----------------------------------------------------------------------------------55⑻车场管理 ----------------------------------------------------------------------------------59八、系统调试---------------------------------- 64九.故障处理与分析----------------------------- 70十、保养与维护------------------------------- 721、硬件维护常识------------------------------------ 722、软件维护常识------------------------------------ 72一、简介智能停车场系统4.0是一个以非接触式智能IC/ID卡为车辆出入停车场凭证、以车辆收费,图像对比管理为核心的多功能车辆收费管理系统,用以对停车场车道入口和出口执行设备实行自动控制、按照预先设定的收费标准实行自动收费,同时将IC/ID卡识别技术和高速的视频图像存储对比技术相结合,通过计算机的图像处理和自动识别,对车辆进出停车场的收费、安保等进行全面而系统的管理。
V4功能设定说明书
主动测量·检测用控制仪PULCOM V4功能设定说明书株式会社东京工程目录第一章概要------------------------------------------------------------------1-1概要------------------------------------------------------------------1-2画面构成------------------------------------------------------------1-3设定条件一览表---------------------------------------------------1-5 第二章设定条件的变更----------------------------------------------------2-1设定条件变更项目-------------------------------------------------2-2基本功能设定条件的变更----------------------------------------2-3扩展功能设定条件的变更----------------------------------------2-5概要PULCOM V4对于各种功能的有/无以及设定值的变更,用键操作就可以简单的进行,举一个例子,由于安装机床的振动,显示数据经常闪动。
此时,设定滤波功能,闪动的显示就能够稳定下来,这样,有效的利用各种功能就可以设定最适宜的测量条件。
在能够设定的条件中,因为是有限制的所以希望在很好的阅读本书,很好的理解内容的基础上进行变更。
在本书中,关于各种功能,用哪一个画面能够变更,进行了说明。
画面构成基板(BCD/二进制)100记忆110记忆信号输出●LED 检查●LCD检查●薄膜键检查●表头检查●零位D/A检查●放大倍率检查旋转开关:G1. G2在各种扩展功能或选择功能有效时才显示。
四代站用户使用手册硬件部分PPT学习教案

4、Master Cloc k Gen erator MCLG 主时 钟发生 器
MCLG为BTS生 成精确 的时钟 ,由该 基准还 衍生出 其他时 钟信号 ,并分 配给其 它单元 。
第10页/共46页
第11页/共46页
(六) DUAL BASEBAND
Unit (BB2x)基带单元
处理控制来表明BOIx 单元的状态.
2、Field Progra mma ble Gate Arra y 现场 可编程 门阵列
FPGA 具 有下列 功能:
监测控制 BTS的 风扇状 态
检查外部 帧时钟
允许由TS xx和BB2x之 间的软 件所形 成的多 种连接
第9页/共46页
3、D-BUS D总 线
Wideband Combiner
Air flow
Duplexer unit
BottomRF filter Unit Cooling Fan
第23页/共46页
99625895
(十)Du al Variable Gain Duplex Filter Unit
(DVxx) 对偶变 量增益 双工滤 波器单 元
第33页/共46页
(二) COMBI NING BY-PASS 直 接合路
TRX RF Units
Receive Multicoupler
Dual Duplex Unit
Antennas
TX
RX
main
div
LNA
Duplexer Duplexer
TX
RX
main
div
Splitte r
Splitte r
Red – Unit Faulty or No BB2 Connection Yellow – Unit On, Working, and not Transmitting (TX Off) Green – Unit On and Working Blinking Red – Loop Test
UDEC4.0使用说明
菜单驱动模式运行离散元1、菜单驱动模式运行离散元对于Itasca加码图形界面是一个菜单驱动的图形界面开发,以协助助用户掌握Itasca代码。
在UDEC中,UDEC—GIIC很容易与点和点击式操作,以访问所有的命令和设施。
该GIIC结构是专门用来模拟预期的Windows功能,并允许显示的项目相对应的离散元操作的一般性鼠标性操作。
你可以能够立即使用UDEC解决问题,无须通过命令来选择你需要的分析。
本节提供了一个GIIC的介绍,并包括一个简单的教程,以帮助您开始。
你会注意到在GIIC主菜单栏中一个帮助菜单。
帮助按钮还包括在GIIC中的每一个工具,并且帮助窗格可以通过在模型工具标签上右击打开。
咨询帮助意见可以得到具体的GIIC功能的详细信息。
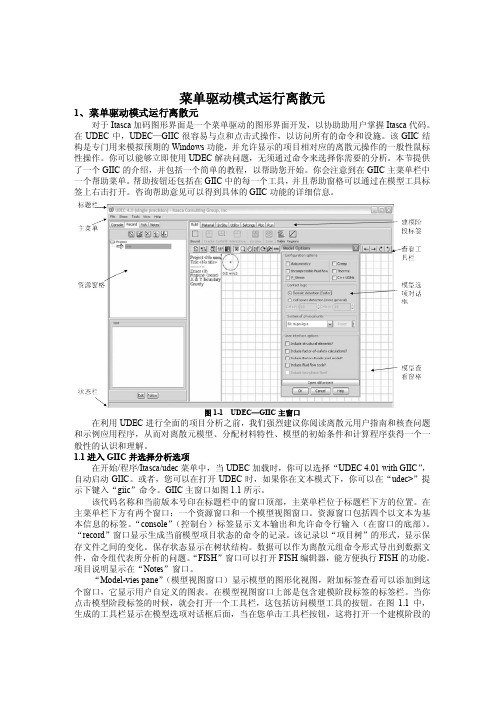
图1-1 UDEC—GIIC主窗口在利用UDEC进行全面的项目分析之前,我们强烈建议你阅读离散元用户指南和核查问题和示例应用程序,从而对离散元模型、分配材料特性、模型的初始条件和计算程序获得一个一般性的认识和理解。
1.1进入GIIC并选择分析选项在开始/程序/Itasca/udec菜单中,当UDEC加载时,你可以选择“UDEC 4.01 with GIIC”,自动启动GIIC。
或者,您可以在打开UDEC时,如果你在文本模式下,你可以在“udec>”提示下键入“giic”命令。
GIIC主窗口如图1.1所示。
该代码名称和当前版本号印在标题栏中的窗口顶部,主菜单栏位于标题栏下方的位置。
在主菜单栏下方有两个窗口:一个资源窗口和一个模型视图窗口。
资源窗口包括四个以文本为基本信息的标签。
“console”(控制台)标签显示文本输出和允许命令行输入(在窗口的底部)。
“record”窗口显示生成当前模型项目状态的命令的记录。
该记录以“项目树”的形式,显示保存文件之间的变化。
保存状态显示在树状结构。
数据可以作为离散元组命令形式导出到数据文件,命令组代表所分析的问题。
“FISH”窗口可以打开FISH编辑器,能方便执行FISH的功能。
UDEC实例翻译与命令解析

UDEC实例翻译与命令解析翻译:珠穆朗玛1 地震诱发地层坍塌Seismic-Induced Groundfall1.1 问题描述本例展示使用UDEC模拟分析地震诱发地层坍塌的一类的问题,模型见图1.1,该模型基于加拿大安大略省萨德伯里市鹰桥公司弗雷则矿34-1-554切割断面的一个剖面图的结构和尺寸. 用二维平面应变模型代表垂直于超采轴向方向的平面效应,超采面高5m,宽10m.假定两个连续节理交叉平面分析:一个角度为45度,另一个为-9度,两者节理间距均为5m,为了演示的目的,一个近似垂直的“虚拟节理”也被添加到块体内开挖面顶部以增强不稳定性。
围岩参数来自试验室平均测试数值,假定岩石块体参数如下:假定块体仅具有弹性行为,节理假定符合库伦滑动准则,选择典型的教课书数值作为节理参数,如下:初始应力状态按各向同性估计为24Mpa(假定垂直荷载由覆盖深度大约800m的岩层产生)。
1.2 UDEC分析UDEC模拟顺序分三个阶段,首先,模型在初始应力状态下进行无超采固结.其次,进行开挖并且模型循环至平衡状态.本阶段超采面周围的应力分布见图 1.2.超采正上方和下方的块体滑动后稳定.在第三阶段.估计了两个不同的峰值速度的地震事件.对所有地震模拟,在问题域的外周边界引入粘滞边界用以消除波的反射.从而模拟有限的岩体,地震事件用施加到模型顶部y方向的正弦应力波表现.应力波被叠加到已存在的初始地应力上.在第一个模拟中,施加1.25Mpa的峰值应力,应当注意的是,由于粘滞边界条件实际是在模型顶部, 施加的有效影响应力应该是1.25 MPa/2, or 0.625 MPa.0.02秒后的开挖面拱顶的应力分布见图1.3,两点的位移被监测,1点位于开挖面的左角,点2位于拱顶块体的右角, 图1.4的位移时间曲线显示两点本质上是弹性反应.本例关心的问题是在模型顶部施加的速度和计算速度的对比,下面的公式可以用以估计施加的波速.使用这个方程,施加的最大波速大概是0.04m/sec,图1.5显示的峰值波速小于0.06m/sec. 估计的波速和监测波速的不同在于使用的围岩模量.而是没有考虑节理变形的相等变形模量.在第二个案例中,施加应力波峰值12.5 Mpa(有效应力6.25Mpa).0.02秒后的开挖拱顶应力分布见图1.6.该图显示出拱顶岩体不受力,表面该块体已经松散并正在下落.对于关心的问题,后来三个时间的几何体和应力分布见图1.8至图1.10.在问题的顶部预测的波速(从上面的方程)是0.4m/sec.从模型中计算的波速见图1.11,再次,由于使用的是原岩弹性模量而不是岩体的变形模量导致预测和监测的波速之间的差异.1.3节包含了该模型的数据列表,该列表包含了一个FISH函数(show)被用来创建坍塌的动画文件,每隔0.02秒俘获一个显示的图片.通过改变FISH参数time_int可以改变动画帧的间隔.视图的总数也可以通过改变snap_shot的数值进行改变.为了显示80帧的显示图片而创建的该电影文件需要大概13MB的硬盘空间.1.3 数据文件列表Example 1.1 SEISMIC.DATtitleSEISMIC INDUCED ROOF COLLAPSE 地震诱发拱顶坍塌;round 0.01; define original boundary of modeled region 定义模型区域的原始边界block -25,-20 -25,20 25,20 25,-20; generate joint pattern over entire original region 在整个原始区域生成节理形态jregion id 1 -25,-25 -25,25 25,25 25,-25jset 45,0 200,0 0,0 5.0,0 (0,0) range jreg 1jset -9,0 200,0 0,0 5.0,0 (0,0) range jreg 1; put in joints needed for the later excavation 为了后面开挖而设置的节理crack -5.01,-2.51 5.01,-2.51crack -5.01, 2.51 5.01, 2.51crack -5,-2.5 -5,2.5crack 5,-2.5 5,2.5crack 2.25,2.5 1.93,5.0; generate fdef zones and assign joint properties (mat=1 & jmat=1;default) 生成单元和设置节理参数generate edge 9.0 range -30,30 -30,30prop mat=1 d=0.00300 k=39060 g=31780prop jmat=1 jkn=20000 jks=20000prop jmat=1 jf=30.0; apply boundary conditions and initial conditions to 在地应力下施加边界条件和初始条件; consolidate model under field stressesbound stress=-24.0, 0.0, -24.0 ygrad=-.03 0 -.03insitu stress=-24.0, 0.0, -24.0 ygrad=-.03 0 -.03bound yvel 0.0 range -26,26 -21,-19grav 0.0 -10.0; track the x-displacement, and y-displacement over time 追踪位移hist solvehist xdis=0,7 ydis=0,7 type 1solve rat 1e-5; save consolidated statesave seismic1.sav; make excavationdelete range -5,5 -2.5,2.5solve rat 1e-5; save excavated statesave seismic2.sav;rest seismic2.sav; apply seismic load from top (peak velocity=0.04 m/sec);; set up nonreflecting boundarybound mat=1bound xvisc range -26 -23 -21 21bound xvisc range 23 26 -21 21bound xvisc yvisc range -26 26 -21 -19bound xvisc yvisc range -26 26 19 21; apply sinusoidal stress wavebound stress 0 0 -1.25 yhist=cos(100.0,0.0195) range -26 26 19 21;reset time hist disp rothist ydis (-4.48,2.57)hist ydis (0,2.57) yvel (0,2.57) yvel (4,2.57) yvel(-4.48,2.57)hist yvel (0,20) yvel (25,10) yvel (25,-10) yvel (0,-20)hist yvel (-25,-10) yvel (-25,10)hist sxx (25,10) sxx (25,-10) sxx (-25,-10) sxx (-25,10)hist syy (0,20);damp 0.1 1.0 mass; 0.02 sec.cyc time 0.02save seismic3.sav;rest seismic2.sav; apply seismic load from top (peak velocity=0.4 m/sec); set up nonreflecting boundarybound mat=1bound xvisc range -26 -23 -21 21bound xvisc range 23 26 -21 21bound xvisc yvisc range -26 26 -21 -19bound xvisc yvisc range -26 26 19 21; apply sinusoidal stress wavebound stress 0 0 -12.5 yhist=cos(100.0,0.0195) range -26 26 19 21reset time hist disphist ydis (-4.48,2.57)hist ydis (0,2.57) yvel (0,2.57) yvel (4,2.57) yvel(-4.48,2.57)hist yvel (0,20) yvel (25,10) yvel (25,-10) yvel (0,-20)hist yvel (-25,-10) yvel (-25,10)hist sxx (25,10) sxx (25,-10) sxx (-25,-10) sxx (-25,10)hist syy (0,20);damp 0.1 1.0 masssave seismov.sav;; 0.02 sec. —————————————————————————————————————cyc time 0.02save seismic4.sav; 0.25 sec.cyc time 0.23save seismic5.sav; 0.50 sec.cyc time 0.25save seismic6.sav; 0.75 seccyc time 0.25save seismic7.sav;rest seismov.sav; make a movie of the groundfall;wind -12 12 -12 12set ovtol 0.05plot block vel max 2.0 blue stress max 50movie onmovie file = seismic.dcxmovie step 1000step 400003 隧道支护荷载Tunnel Support Loading3.1 问题陈述本例模拟展示了UDEC在检查衬砌隧道方面的应用,着重强调了荷载在混凝土衬砌中的发展,本例也解释了模拟连续建造操作中独立阶段的模拟程序.隧道系统的理想几何体见图3.1.系统包含在海床下大约70m(中线)深度,中线间距12m 的两个隧道, 初始水位在隧道中线上方110m处.服务隧道直径5.24m,衬砌厚度37cm.主隧道直径8.22m,衬砌厚度46cm.服务隧道先于主隧道开挖和衬砌.随后设置主隧道衬砌,水位上升增加到100m.—————————————————————————————————————施工顺序是:(1)开挖服务隧道excavation of the service tunnel;(2)衬砌服务隧道lining of the service tunnel;(3)开挖主隧道excavation of the main tunnel;(4)衬砌主隧道lining of the main tunnel; and(5)升高水位raising of the water level.分析的目的是评价每个施工阶段服务隧道和主隧道支护状况.本例的材料参数见下:岩体——开挖隧道的围岩参数为:弹性模量 elastic modulus 0.89 GPa泊松比Poisson’s ratio 0.35单轴抗压强度uniaxial compressive strength 3.5 MPa粘聚力 cohesion 1 MPa密度 density 1340 kg/m3混凝土衬砌——弹性模量为 24 GPa ,泊松比为0.19. 假定衬砌为线弹性材料。
野火4.0安装说明详解带图

1.把安装文件加载到虚拟光驱,因为不用虚拟光驱,只有一个安装文件(1),且不可用,加载到虚拟光驱之后方可看到正式的安装文件和其他很多文件(2),加载到虚拟光驱后,方可看到(3),打开(3)进入到(2),如图所示。
图(1)图(2)图(3)2.运行SETUP.EXE,这时候会出现一个界面如图(4),在左下角有ID:xxxxxxxxx,注意有可能同一个电脑在不同时候出现的ID不一样,然后记下ID:xxxxxxxx图(4)3.打开SHOOTTERS,复制一个文件ptc_licfile.dat到桌面,用记事本打开,把里面所以的"00-00-00-00-00-00"改为你主机ID后保存,以便下一步要用。
如何快捷的替换修改,方法如下,用记事本打开后,点编辑-替换-打开的对话框中,输入,查找内容为:00-00-00-00-00-00,替换为:刚才记下的主机ID,点全部替换,关闭保存。
不过此文件只是暂时借用,安装完毕后可删除,所以在修改之前,先复制一份放到你方便查找或者打开的地方,比如放在桌面,不要直接在你的安装文件了修改。
4.接着2打开的界面,点下一步,点接受,再点下一步,出现界面(5),选择第二个“Pro/ENGINEER”,再点下一步,出现许可证服务器,点添加,选择锁定的许可证文件(服务器未运行),许可证文件路径,即为刚才用记事本打开然后修改保存的那个文件,打开即可,点确定,点下一步,再点下一步,点安装,慢慢等待安装结束。
图(5)5.破解。
方法,打开名为SHOOTERS,找到名为"ptc.pro engineer.wildfire.4.0.win32-patch.exe"的文件,图(6)复制粘贴到你安装的目录,找到文件i486_nt,打开,找到文件obj,打开,粘贴到里面,然后再运行此文件,出现界面(7)点Patch,在出现的所有提示中都点NO,然后破解完成。
在桌面打开图标就可。
海康监控软件4000操作说明
网络视频监控软件-4000操作说明目录一设备管理1.1 列表树配置 41.2 添加设备的操作 51.3 通道的配置 8二图像预览2.1非轮循预览 92.2按节点播放 92.3结束播放 10三云台控制3.1 485参数设置 113.2 云台控制 123.3 方向控制 12四录像和回放4.1 录像 134.2 客户端本地录像 134.3 集中存储服务器录像配置 144.4 NVR服务器的添加 14五维护管理5.1 本地配置 155.2 日志管理 165.3 日志查询 165.4 用户管理 185.5 用户的添加、删除 19一设备管理使用软件进行操作前,需要先对设备进行添加和配置操作。
点击标签栏标签进入配置模式,点击右侧导航栏“设备管理”项即可进入设备管理的界面。
1.1 列表树配置软件初始运行时,列表树里默认为空,右键点击列表树任意空白处可进行区域的添加。
在区域名称栏中填写名称后点击确定即可向列表树中添加一个区域,并且由于本次添加的区域为首个区域,因此该区域不存在上级区域,因此上级区域名称栏中为空。
区域添加完成后,右键点击区域节点,可选择进行子区域、设备和流媒体的添加操作。
注:区域名称中头尾的换行、空格、TAB字符将被自动去除。
区域名称不能为空,不能含有字符“%”、“'”和“%”(不包含左右引号“和”)。
注:添加了一个区域后,该区域自动进入选中状态,此时在列表树中的空白区域右键点击无效。
中性发布版最多支持50个区域。
注意:如果删除区域下包含有其他区域、流媒体、设备或者通道,则删除操作不仅会删除选中的区域,而且会删除该区域下所有的区域、流媒体、设备或者通道;若该区域下有通道正在预览或录像,将会给出警告信息。
右键点击添加的区域,弹出区域管理菜单。
选择“添加区域”,可进行子区域的添加。
选择“删除节点”将删除处于选中状态下的区域。
双击选中的区域节点,弹出“修改区域信息”菜单,可进行区域名称的修改。
1.2 添加设备的操作右键点击添加的区域,弹出区域管理菜单,选择“添加设备”。
网络锁使用说明_服务器端找不到锁_100128

精锐IV网络锁说明目录精锐IV网络锁说明 (1)1、安装加密锁驱动程序 (2)2、安装网络锁服务程序 (3)3、工具及配置文件说明 (5)3.1网络锁服务管理工具 (5)3.1.1添加主机 (5)3.1.2网络锁参数配置 (6)3.1.3使用服务管理程序 (8)3.2配置文件 (9)3.2.1管理配置文件 (9)3.2.2服务配置文件 (9)3.2.3客户端配置文件 (11)4、网络锁访问测试 (11)5、常见问题处理(FAQ) (13)附录 (16)1、检查服务器端的TCP、UDP端口是否被占用 (16)网络版可以允许多个软件的实例同时访问连接在服务器上的同一个加密锁,即对加密锁进行共享。
通过限制同时运行的客户端软件数目,可以达到对软件的使用进行控制的目的。
相对于单机版来说,网络版不仅需要保护软件不被非法复制,同时必须严格限制同时运行的软件数目。
1、安装加密锁驱动程序加密锁默认为有驱模式,需要安装驱动程序。
安装SDK 的过程会自动安装精锐IV 的设备驱动程序,在一些情况下您可能需要单独安装驱动程序(例如将整个SDK 复制到其它计算机中直接使用、发布您的软件),这时候您需要使用SDK中提供的驱动程序安装工具。
该工具位于%SDK%\Drivers 目录下,名称为“InstWiz3.exe”。
这是一个WIN32 可执行程序,可以接受以下命令行参数:♦/INSTALL 安装驱动程序(该选项为默认选项)♦/UNINSTALL 卸载驱动程序♦/NOGUI 不显示安装界面这些命令行参数可以组合使用,例如,您可以运行“InstWiz3.exe /uninstall /nogui”来隐式卸载设备驱动。
该工具也可以用来检测当前系统中精锐IV 设备驱动程序的安装情况:运行InstWiz3.exe,工具将自动检测并汇报驱动程序的安装情况。
有几种办法可以测试驱动程序是否安装成功:1. 插入精锐IV设备,检查硬件设备列表中是否出现正常的Senselock SenseIV v2.x设备(“设备管理器”Æ“智能卡阅读器”下);对于Windows98、Window2000 或更高版本,如果设备是第一次插入,系统会自动提示“找到新设备”并完成安装;2. 插入精锐IV设备,运行开发测试工具或者用户工具,看是否能成功访问设备;如果您对设备驱动程序的安装过程非常熟悉,您也可以选择手工的方式安装精锐IV 设备驱动。
UDEC英文说明

1STRUCTURAL ELEMENTS1.1IntroductionAn important aspect of geomechanical analysis and design is the use of structural support to stabilize a soil or rock mass.The term support describes engineered materials used to restrict displacements in the immediate vicinity of an opening.In this section,support is divided into two types:rein-forcement and surface support.Reinforcement consists of tendons(i.e.,cables)or bolts installed in holes drilled in the rock mass. Reinforcement acts to conserve inherent rock mass strength so that it becomes self-supporting. Two types of reinforcement model are provided in UDEC:local and global reinforcement.A local reinforcement model considers only the local effect of reinforcement where it passes through existing discontinuities.A global reinforcement model considers the presence of the reinforcement along its entire length throughout the rock mass.Surface support consists of concrete lining,steel sets,shotcrete,etc.that are placed on the surface of an excavation and,in many cases,act to truly support,in whole or part,the weights of individual blocks isolated by discontinuities or zones of loosened rock.Structural beam elements are provided in UDEC to simulate surface support for both interior excavations,such as tunnels,and surface excavations,such as open cuts and natural slopes.Surface support also includes one-dimensional support members that represent hydraulic or wooden props or packs.This support acts as a single degree-of-freedom member that is connected between two boundaries of an interior opening.Each support type is described separately,below.In all cases,the commands necessary to define the structure(s)are quite simple,but they invoke a very powerful andflexible structural logic.This logic is developed with the samefinite-difference algorithms as the rest of the code(as opposed to a matrix-solution approach),allowing the structure to accommodate large displacements and to be applied for dynamic as well as static analysis.Note that,because UDEC is a two-dimensional program,the three-dimensional effect of regularly spaced elements is accommodated by scaling their material properties in the out-of-plane direction. This procedure is explained in Section1.5.1.1.2ReinforcementThere are several different types of reinforcement designed to operate effectively in a range of ground conditions.One type is represented by a reinforcing bar or bolt fully encapsulated in a strong,stiff resin or grout.This system is characterized by the relatively large axial resistance to extensions that can be developed over a relatively short length of the shank of the bolt,and by the high resistance to shear that can be developed by an element penetrating a slipping joint.A second type of reinforcement system,represented by cement-grouted cables or tendons,offers little resistance to joint shear,and development of full-axial load may require deformation of the grout over a substantial length of the reinforcing element.These two types of reinforcement are identified,respectively,as local reinforcement and global(or spatially extensive)reinforcement. The characteristic behavior of these two rock reinforcement systems has been incorporated into UDEC.1.2.1Local Reinforcement at Joints(REINFORCE Command)The local reinforcement formulation considers only the local effect of reinforcement where it passes through existing discontinuities.The formulation results from observations of laboratory tests of fully grouted untensioned reinforcement in good quality rocks with one discontinuity,which indicate that strains in the reinforcement are concentrated across the discontinuity(Bjurstrom1974and Pells 1974).This behavior can be achieved in the computational model by calculating,for each element, the forces generated by displacements across the discontinuity through which the element passes. The following description of this formulation is taken from Lorig(1985).This formulation exploits simple force-displacement relations to describe both the shear and axial behavior of reinforcement across rge shear displacements are accommodated by considering the simple geometric changes that develop locally in the reinforcement near a discontinuity.Although the local reinforcement model can be used with either rigid blocks or deformable blocks,the representation is most applicable to cases in which deformation of individual rock blocks may be neglected in comparison with deformation of the reinforcing system.In such cases,attention may be focused reasonably on the effect of reinforcement near discontinuities. 1.2.1.1Axial BehaviorHistorically,axial testing of rock reinforcement has focused on pull-out tests for two reasons:(1)ease of experimentation and interpretation of results;and(2)provision of axial restraint(the main function of reinforcement in the prevailingconceptual models).Consequently,a relatively good understanding of axial force-displacement relations has been achieved.The axial force-displacement relation typically used in the representation of rock re-inforcement is shown in Figure1.1.ultimate anchorage strength,P ult.One such relation for the design of cement-grouted reinforcement is given by Littlejohn and Bruce(1975):P ult=0.1σcπd2L(1.2) whereσc=uniaxial compressive strength of massive rocks(100%core recovery)up to a maximum value of42MPa,assuming that the compressive strength of thecement grout is equal to or greater than42MPa;andL=bond length.1.2.1.2Shear BehaviorRecognition that reinforcement also acts to modify the shear stiffness and strength of disconti-nuities has led to laboratory shear testing of reinforced discontinuities.Experimental results and theoretical investigations indicate that shearing along a discontinuity induces bending stresses in the reinforcement that decay very rapidly with distance into the rock from the shear surface.Typically, within one to two reinforcing element diameters,the bending stresses are insignificant.The shear force-displacement relation typically used to represent shear behavior is shown in Fig-ure1.2.Thefigure shows representative responses for reinforcement at various attitudes with respect to the traversed discontinuity and direction of shear.If the results of physical tests are not available,the shear stiffness,K s,may be estimated using the following expression from Gerdeen et al.(1977).K s=E b Iβ3(1.3) whereβ=[K/(4E b I)]1/4;K=2E g/(d2/d1−1);I=second moment of area of the reinforcement element;andE g=Young’s modulus of the grout.FigureEmpirical relations ement at various example,Bjurstrom to a discontinuity inwhereσb=yieldIn their assessment of Azuar et al.of the uniaxial perpendicular to the inclined with the approximately two inclined case.St.displacement1.2.1.3Numerical FormulationThe model in UDEC assumes that,during shear displacement along a discontinuity,the rein-forcement deforms as shown in Figure1.3.The short length of reinforcement which spans the discontinuity and changes orientation during shear displacement is referred to as the active length. The assumed geometric changes were originally suggested in a derivation by Haas(1976)for con-ventional point-anchored reinforcement and adopted by Fuller and Cox(1978)in considering fully grouted reinforcement.Figure1.3Assumed reinforcement geometry after shear displacement, u sIt is assumed that the active length changes orientation only as a direct geometric result of shear and normal displacements at the discontinuity.Methods for estimating the active length are presented in the next section.The model may be considered to consist of two springs located at the discontinuity interface and oriented parallel and perpendicular to the reinforcement axis,as shown in Figure1.4. Following shear displacement,the axial spring is oriented parallel to the active length,while the shear spring remains perpendicular to the original orientation,as shown in Figure1.4.Similar geometric changes follow displacements normal to the discontinuity.Figure1.4Orientation of shear and axial springs representing reinforce-ment prior to and after shear displacementThe force-displacement models used in UDEC to represent axial and shear behavior are continuous, nonlinear algorithms written in terms of stiffness(axial or shear),the ultimate load capacity and a yield function.The yield function describes the force-displacement path followed in approaching the ultimate capacity.The force-displacement relation that describes the axial response is given by the following equation.F a=K a| u a|f(F a)(1.5)where F a is an incremental change in axial force;u a is an incremental change in axial displacement;K a is the axial stiffness;andf(F a)is a function describing the path by which the axial force,F a approaches the ultimate(or bounding)axial force F maxa,b.The functionf(F a)=|F maxa,b−F a|(F maxa,b−F a)[F maxa,b]2ea(1.6)is used to represent the axial yield curve.From Eq.(1.5),the axial force“seeks”the boundingforce in an asymptomatic manner.The axial stiffness exponent,e a,controls the rate at which the bounding force is reached.If e a=0,then the axial stiffness remains constant.In computing the incremental axial displacement of the active length,it is necessary to account for crushing of the grout and/or rock near the discontinuity as shear displacement causes the reinforce-ment to bear against one side of the hole.In the present model,a reduction factor,r f,is applied to incremental axial displacements arising from changes in orientation of the active length to account for the crushing.The reduction factor is computed from the following expression.r f=|u axial|(u2s+u2n)−1/2(1.7) where u axial=summation of axial displacement increments(i.e.,discontinuity displacementincrements resolved at each configuration in the direction of the active length);u s=total discontinuity shear displacement;andu n=total discontinuity normal displacement.Note that no reduction(r f=1.0)is applied for cases in which there is no change in orientation of the active length.The shear force-displacement relation is described in incremental form by the expressionF s=K s| u s|f(F s)(1.8)where F s is an incremental change in shear force;u s is an incremental change in shear displacement;K s is the shear stiffness;andf(F s)is a function describing the path by which the shear force,F s,approaches the ultimate or bounding shear force,F maxs,b.The functionf(F s)=|F maxs,b−F s|(F maxs,b−F s)[F maxs,b]2es(1.9)is used to represent the shear yield curve.From Eq.(1.8),the shear force“seeks”the bounding force in an asymptotic manner.The shear stiffness exponent,e s,controls the rate at which the bounding force is reached.If e s=0,then the shear stiffness remains constant.The maximum shear force,F maxs,b ,changes for various orientations of the active length.The fol-lowing equation is used to adjust the maximum shear force.F max s,b =F maxs1+[sign(cosθ0, u s)·cos(θ0)]2(1.10)where F maxs=πd21σb/4;andu s=incremental change in shear displacement.The term sign(cosθ0, u s)assigns the sign of u s to cos(θ0).The maximum shear force,F maxs,b ,decreases from a maximum atθ0=0◦to50%of F maxs atθ0=90◦(see Figure1.2),which isconsistent with the results of Azuar et al.(1979).The force-displacement relations described above are used to determine forces arising in the springs from incremental displacements at the end points of the active length.The resultant shear and axial forces are resolved into components parallel and perpendicular to the discontinuity,as shown in Figure1.5.Forces are then applied to the neighboring blocks.Figure1.5Resolution of reinforcement shear and axial forces into compo-nents parallel and perpendicular to discontinuity1.2.1.4Estimation of Active LengthAn estimate of the active length is required to define the assumed local deformation illustrated in Figure1.3.It has been shown that the active length extends approximately one to two reinforcing element diameters on either side of the discontinuity.In the absence of experimental data,results of theoretical analysis may be used to define the active length.For example,in defining the elastic shear stiffness,K s,Gerdeen et al.(1977)also determine a quantity,l,called the load transfer length,or“decay length.”Ifρmax is the proportion of maximum deflection in the reinforcement, the relation between it and the load transfer length may be expressed bye−βl=ρmax(1.11) For example,the point at which the deflection decays to5%of its maximum value ise−βl=0.05orl=3/β.This approach was developed for reinforcement oriented perpendicular to the shear plane.Dight (1982)presents a theoretical analysis for determining the distance from the shear plane to maximum moment which corresponds with the location of the plastic hinge in the reinforcement element.This approach places no restrictions on the orientation of the reinforcement with respect to the shear plane.A significant result of this analysis is that the distance of the plastic hinge from the shear plane does not appear to vary greatly with shear displacement,especially for displacements greater than10mm(0.4in)for typical reinforcement systems.This observation is in agreement with the assumed geometry changes described earlier.1.2.1.5Local Reinforcement PropertiesThe local reinforcement elements used in UDEC require the following input parameters:(1)axial stiffness[force/length];(2)axial stiffness exponent;(3)ultimate axial capacity[force];(4)axial failure strain;(5)shear stiffness[force/length];(6)shear stiffness exponent;(7)ultimate shear capacity[force];(8)1/2active length;and(9)reversal factor.The axial stiffness,axial stiffness exponent and ultimate axial capacity are usually determined to bestfit pull-out tests,as described in Section1.2.1.1.By default,the axial stiffness exponent is zero,so the axial force-displacement relation follows a constant axial stiffness until the ultimate axial capacity is reached.A limiting axial strain can also be defined;if not specified,the axial strain is unlimited.The shear stiffness,shear stiffness exponent,ultimate shear capacity and1/2the active length can also be back-calculated from experimental testing,as discussed in Sections1.2.1.2and1.2.1.4. By default,the shear stiffness exponent is zero and a constant shear stiffness is assumed until the ultimate shear capacity is reached.A reversal factor can also be specified.This controls the slope of the shear force-displacement relation when the direction of the shear force is reversed.Reasonable values for the reversal factor vary between0and1.If the factor equals1,then the slope upon reversal is the same as that upon initial loading.1.2.1.6Summary of Commands Associated with Local Reinforcement ElementsAll the commands associated with local reinforcement elements are listed in Table1.1,below.See Section1in the Command Reference for a detailed explanation of these commands.Table1.1Commands associated with local reinforcement elementsREINFORCE mat x1y1x2y2REINFORCE delete<range>PROPERTY mat mat keywordr aexp valuer astiff valuer length valuer rfac valuer sexp valuer sstiff valuer str valuer uaxial valuer ushear valuePLOT keywordaxialreinforcePRINT property reinfreinforce1.2.1.7Example Application—Reinforced SlopeThe rock slope shown in Figure1.6is40m high with foliation planes parallel to the slope face. The planes dip at an angle of76◦and have a4m spacing.Two nearly horizontal joints intersect the slope face at a dip angle of2.5◦.The friction angle of all joints is6◦.The slope is not stable and fails in a reverse-toppling mode,as shown in Figure1.7.The slope is stabilized by adding two horizontal lines of local reinforcement.The mobilized axial forces in the reinforcement are shown in Figure1.8.The input commands for this example are listed in Example1.1.Example1.1Reinforced slopeblock000508050800jreg301039.150********jset760100000403010crack0103210crack3012.56514crack35307031.5delete0301050fix 0801020prop mat 1dens 2000jkn 1e8jks 1e8jfric 5.7grav 0-10hist unbal;add local reinforcement ;reinf 1030406040;reinf 1030206020;prop mat 10r_astiff 1e8r_sstiff 1e8r_leng 1r_uaxial 1e6r_ushear 1e6;step 3000retUDEC (Version 4.00)LEGEND23-Aug-04 9:58 cycle 0time 0.000E+00 sec block plot-1.0000.0001.0002.0003.0004.0005.0006.000(*10^1)0.5001.5002.5003.5004.5005.5006.5007.500(*10^1)JOB TITLE :Itasca Consulting Group, Inc. Minneapolis, Minnesota USAFigure 1.6Slope with steeply dipping foliation planesUDEC (Version 4.00)LEGEND23-Aug-04 9:58 cycle 3000time 1.377E+01 sec block plot velocity vectorsmaximum = 1.504E+000 5E 0-1.0000.0001.0002.0003.0004.0005.0006.000(*10^1)0.5001.5002.5003.5004.5005.5006.5007.500(*10^1)JOB TITLE :Itasca Consulting Group, Inc. Minneapolis, Minnesota USAFigure 1.7Slope failure by reverse topplingUDEC (Version 4.00)LEGEND23-Aug-04 9:44 cycle 3000time 1.377E+01 sec block plotmax axial force =-6.668E+050 2E 6-1.0000.0001.0002.0003.0004.0005.0006.000(*10^1)0.5001.5002.5003.5004.5005.5006.5007.500(*10^1)JOB TITLE :Itasca Consulting Group, Inc. Minneapolis, Minnesota USAFigure 1.8Stabilization of slope by reinforcement1.2.2Global Reinforcement(CABLE Command)In assessing the support provided by rock reinforcement,it is often necessary to consider not only the local restraint provided by reinforcement where it crosses discontinuities,but also the restraint to intact rock that may experience inelastic deformation in the failed region surrounding an excavation.Such situations arise in modeling inelastic deformations associated with failed rock and/or reinforcement systems(e.g.,cable bolts)in which the bonding agent(grout)may fail in shear over some length of the reinforcement.Cable elements in UDEC allow the modeling of a shearing resistance along their length,as provided by the shear resistance(bond)between the grout and either the cable or the host medium.The cable is assumed to be divided into a number of segments of length L,with nodal points located at each segment end.The mass of each segment is lumped at the nodal points,as shown in Figure1.9. Shearing resistance is represented by spring/slider connections between the structural nodes and the block zones in which the nodes are located.Deformable blocks must be specified to use the cable logic,and the blocks must be made deformable before the cable elements are installed.Each structural node is associated with afinite difference zone for calculation of shear forces between the cable and the zones.Figure1.9Conceptual mechanical representation of fully bonded reinforce-ment which accounts for shear behavior of the grout annulus1.2.2.1Axial BehaviorThe axial behavior of conventional reinforcement systems may be assumed to be governed entirely by the reinforcing element itself.The reinforcing element is usually steel and may be either a bar or cable.Because the reinforcing element is slender,it offers little bending resistance(particularly in the case of cables),and is treated as a one-dimensional member subject to uniaxial tension or compression.A one-dimensional constitutive model is adequate for describing the axial behavior of the reinforcing element.In the present formulation,the axial stiffness is described in terms of the reinforcement cross-sectional area,A,and the Young’s modulus,E.The incremental axial force, F t,is calculated from the incremental axial displacement byF t=−EALu t(1.12)where u t= u i t i= u1t1+ u2t2=(u[b]1−u[a]1)t1+(u[b]2−u[a]2)t2u[a] 1,u[b]1,etc.are the displacements at the cable nodes associated with each cable element.Subscript1corresponds to the x-direction,and subscript2to the y-direction.The superscripts[a],[b]refer to the nodes.The direction cosines t1,t2refer to the tangential(axial)direction of the cable segment.A tensile yield force limit(cb yield)and a compressive yield force limit(cb ycomp)can be assigned to the cable.Accordingly,cable forces that are greater than the tensile or compressive limits (Figure1.10)cannot develop.If either cb yield or cb ycomp is not specified,the cable will have zero strength for loading in that direction.In evaluating the axial forces that develop in the reinforcement,displacements are computed at nodal points along the axis of the reinforcement,as shown in Figure1.9.Out-of-balance forces at each nodal point are computed from axial forces in the reinforcement,as well as shear forces contributed through shear interaction along the grout annulus.Axial displacements are computed based on integration of the laws of motion using the computed out-of-balance axial force and a mass lumped at each nodal point.A similar expression is used for y-component displacements.The weighting factors W1,W2,W3 are computed from the position of the nodal point within the triangle,as follows.W1=A1/A T(1.14)where A T is the total area of thefinite-difference triangle;andA1is the area of the triangle in Figure1.12(b).Incremental x-and y-displacements(Eq.(1.13))are used at each calculation step to determine the new local reinforcing orientation.The axial component of displacement of the grout/rock interface is computed from the current orientation of the reinforcing segment.Forces generated at the grout/rock interface(F xp,F yp)are distributed back to gridpoints according to the same weighting factors used previously—i.e.:F x1=W1·F xpF x2=W2·F xp(1.15)F x3=W3·F xpwhere F x1,F x2and F x3are forces applied to the gridpoints.132A3A2A1(b) areas used in determining weighting factors used to computedisplacement of grout/rock interface(a) typical reinforcing element passing through a triangular zoneFigure 1.12Geometry of triangular finite difference zone and transgressingreinforcement used in distinct element formulation1.2.2.3Normal Behavior at Grout InterfaceAs explained above,an interpolated estimate of gridpoint velocity is made at each cable node.The velocity component normal to the average axial cable direction is transferred directly to the node —i.e.,the cable node is“slaved”to the gridpoint motion in the normal direction.The node exerts no normal force on the grid if the cable segments on either side of the node are co-linear.However, if the segments make an angle with each other,then a proportion of their axial forces will act in the mean normal direction.This net force acts both on the gridpoint and on the cable node(in opposite directions).Thus,an initially straight cable can sustain normal loading if it undergoes finite deflection.1.2.2.4Cable Element PropertiesThe cable elements used in UDEC require the following input parameters:(1)cross-sectional area of cable;(2)mass density for cable;(3)elastic Young’s modulus for cable;(4)tensile yield strength[force]of the cable;(5)compressive yield strength[force]of the cable;(6)extensional failure strain for the cable;(7)stiffness of the grout[force/cable length/displacement];and(8)cohesive capacity of the grout[force/cable length].Note that property numbers are assigned to cable elements with the CABLE mats material property number for the cable material,and with the CABLE matg material property number for the grout. Each different cable can then be assigned geometric and material properties by specifying the PROPERTY command with the appropriate property keywords following the cable material property number and the grout material property number.For example,property mat=2cb kbond=1e9cb sbond=2e5assigns a cable bond stiffness value of109and a cable bond strength value of2×105to property number2,which is defined,using the CABLE command,to be the property number for the grout. The area,density,modulus and yield force resistance of the cable are usually readily available from handbooks,manufacturer’s specifications,etc.A limiting extensional strain can also be defined for the cable;if not specified,the extensional strain is unlimited.The properties related to the grout are more difficult to estimate.The grout annulus is assumed to behave as an elastic-perfectly plastic solid.As a result of an incremental relative shear displacement, u t,between the tendon surface and the borehole surface,the incremental shear force, F t, mobilized per length of cable is related to the grout stiffness,K bond—i.e.,F t=K bond u t(1.16) K bond can be estimated from pull-out tests.Alternatively,the stiffness can be calculated from a numerical estimate for the elastic shear stress,τG,obtained from an equation describing the shear stress at the grout/rock interface(St.John and Van Dillen1983):τG=G(D/2+t)uln(1+2t/D)(1.17)where G=grout shear modulus;D=reinforcing diameter;andt=annulus thickness.Consequently,the grout shear stiffness,K bond,is simply given byK bond=2πGln(1+2t/D)(1.18)In many cases,the following expression has been found to provide a reasonable estimate of K bond for use in UDEC:K bond2πG10ln(1+2t/D)(1.19)The one-tenth factor helps to account for the relative shear displacement that occurs between the host-zone gridpoints and the borehole surface.This relative shear displacement is not accounted for in the present formulation.The maximum shear force per cable length in the grout is the bond cohesive strength.The value for bond cohesive strength can be estimated from the results of pull-out tests conducted at different confining pressures or,should such results not be available,the maximum force per length may be approximated from the peak shear strength(St.John and Van Dillen1983):τpeak=τI Q B(1.20) whereτI is approximately one-half of the uniaxial compressive strength of the weaker of the rock and grout,and Q B is the quality of the bond between the grout and rock(Q B=1for perfect bonding).Neglecting frictional confinement effects,S bond may then be obtained fromS bond=π(D+2t)τpeak(1.21) Failure of reinforcing systems does not always occur at the grout/rock interface.Failure may occur at the reinforcing/grout interface,as is often true for cable reinforcing.In such cases,the shear stress should be evaluated at this interface.This means that the expressions(D+2t)be replaced by(D)in Eq.(1.21).The calculation of cable-element properties is demonstrated by the following example.A25.4mm (1inch)-diameter locked-coil cable was installed at2.5m spacing perpendicular to the plane of analysis.The reinforcing system is characterized by the properties:cable diameter(D)25.4mmhole diameter(D+2t)38mmcable modulus(E)98.6GPacable ultimate tensile capacity0.548MNgrout compressive strength20MPagrout shear modulus(G)9GPaTwo independent methods are used in evaluating the maximum shear force in the grout.In the first method,the bond shear strength is assumed to be one-half the uniaxial compressive strength of the grout.If the grout-material compressive strength is20MPa and the grout is weaker than the surrounding rock,the grout shear strength is then10MPa.In the second method,reported pull-out data are used to estimate the grout shear strength.The report presents results for15.9mm(5/8inch)-diameter steel cables grouted with a0.15m(5.9 inch)bond length in holes of varying depths.The testing indicated capacities of roughly70kN. If a surface area of0.0075m2(0.15m×0.05m)is assumed for the cables,then the calculated maximum shear strength of the grout is70x103N=9.33x106N/m2=9.33MPa0.0075m2This value agrees closely with the10MPa estimated above,and either value could be used.As-suming that failure occurs at the cable/grout interface,the maximum bond force per length is(using Eq.(1.21)with D+2t replaced by D)S bond=π(0.0254m)(10MPa)=800kN/mThe bond stiffness,K bond,is estimated from Eq.(1.19).For the assumed values shown above,ais calculated.bond stiffness of1.5×1010N/mmValues for K bond,S bond,E and tensile yield force are divided by2.5to account for the2.5m spacing of cables perpendicular to the modeled cross-section(see Section1.5.1).。
UDEC中文指导说明gai
通用离散元用户指导(U D E C 3.1)2004.9目录1 引言 (1)1.1 总论 (1)1.2 与其他方法的比较 (2)1.3 一般特性 (2)1.4 应用领域 (3)2 开始启动 (4)2.1 安装和启动程序 (4)2.1.7 内存赋值 (4)2.1.9 运行UDEC (5)2.1.10 安装测试程序 (5)2.2 简单演示-通用命令的应用 (5)2.3 概念与术语 (6)2.4 UDEC模型:初始块体的划分 (8)2.5 命令语法 (9)2.6 UDEC应用基础 (10)2.6.1 块体划分 (10)2.6.2 指定材料模型 (16)2.6.2.1 块体模型 (16)2.6.2.2 节理模型 (17)2.6.3 施加边界条件和初始条件 (19)2.6.4 迭代为初始平衡 (21)2.6.5 进行改变和分析 (24)2.6.6 保存或恢复计算状态 (25)2.6.7 简单分析的总结 (25)2.8 系统单位 (26)3 用UDEC求解问题 (27)3.1 一般性研究 (27)3.1.1 第1步:定义分析模型的对象 (28)3.1.2 第2步:产生物理系统的概念图形 (28)3.1.3 第3步:建造和运行简单的理想模型 (28)3.1.4 第4步:综合特定问题的数据 (29)3.1.5 第5步:准备一系列详细的运行模型 (29)3.1.6 第6步:进行模型计算 (29)3.1.7 第7步:提供结果和解释 (30)3.2 产生模型 (30)3.2.1 确定UDEC模型合适的计算范围 (30)3.2.2 产生节理 (32)3.2.2.1 统计节理组生成器 (32)3.2.2.2 VORONOI多边形生成器 (34)3.2.2.3 例子 (34)3.2.3 产生内部边界形状 (35)3.3 变形块体和刚体的选择 (38)3.4 边界条件 (42)3.4.1 应力边界 (42)3.4.1.1 施加应力梯度 (43)3.4.1.2 改变边界应力 (44)3.4.1.3 打印和绘图 (44)3.4.1.4 提示和建议 (45)3.4.2 位移边界 (46)3.4.3 真实边界-选择合理类型 (46)3.4.4 人工边界 (46)3.4.4.1 对称轴 (46)3.4.4.2 截取边界 (46)3.4.4.3 边界元边界 (49)3.5 初始条件 (50)3.5.1 在均匀介质中的均匀应力:无重力 (50)3.5.2 无节理介质中具有梯度变化的应力:均匀材料 (51)3.5.3 无节理介质中具有梯度变化的应力:非均匀材料 (51)3.5.4 具有非均匀单元的密实模型 (52)3.5.5 随模型变化的初始应力 (53)3.5.6 节理化介质的应力 (54)3.5.7 绘制应力等值线图 (55)3.6 加载与施工模拟 (57)3.7 选择本构模型 (62)3.7.1 变形块体材料模型 (63)3.7.2 节理材料模型 (64)3.7.3 合理模型的选择 (65)3.8 材料性质 (71)3.8.1 岩块性质 (71)3.8.1.1 质量密度 (71)3.8.1.2 基本变形性质 (71)3.8.1.3 基本强度性质 (72)3.8.1.4 峰后效应 (73)3.8.1.5 现场性质参数的外延 (77)3.8.2 节理性质 (80)3.9 提示和建议 (81)3.9.1 节理几何形状的选择 (81)3.9.2 设计模型 (81)3.9.3 检查模型运行时间 (82)3.9.4 对允许时间的影响 (82)3.9.5 单元密度的考虑 (83)3.9.6 检查模型响应 (83)3.9.7 检查块体接触 (83)3.9.8 应用体积模量和剪切模量 (83)3.9.9 选择阻尼 (84)3.9.10 给块体和节理模型指定模型和赋值 (84)3.9.11 避免圆角误差 (85)3.9.12 接触嵌入 (85)3.9.13 非联结块体 (86)3.9.14 初始化变量 (86)3.9.15 确定坍塌荷载 (86)3.9.16 确定安全系数 (86)3.10 解释 (88)3.10.1 不平衡力 (88)3.10.2 块体/网格结点的速度 (88)3.10.3 块体破坏的塑性指标 (89)3.11 模拟方法 (89)3.11.1 有限数据系统模拟 (89)3.11.2 混沌系统的模拟 (90)3.11.3 局部化、物理的不稳定性和应力路径 (91)1 引言1.1 总论通用离散元程序(UDEC,Universal Distinct Element Code)是一个处理不连续介质的二维离散元程序。
UDEC指令 基本命令
;newtitle moni ;定义名称moni块体都有“圆角”,其目的在于避免块体悬挂在有棱角的节点上。
由于块体悬挂引起应力集中。
然而,圆角值存在与模型有关的上限值。
对于变形块体,最大圆角长度应当不超过块体平均棱长的1%。
圆角长度可以如下命令加以改变:round dround=0.025;d 是圆角距离(缺省值是d=0.5)。
模型中的所有圆角长度都是相同的。
For example, if the commands SET edge 0.4and ROUND 0.1 are specified, then block edge lengths smaller than 0.4 will not be created, and the rounding length for blocks will be 0.1. These commands must be given before the BLOCK command.set ovtol=1;块体与块体之间相互嵌入量最大值为1米bl 0,0 0,100 300,100 300,0 ;定义范围,四点坐标,顺时针方向cr 0,15 300,15;Crack 命令用于产生块体中单一直线特征的裂缝,裂缝由端点坐标(x1,y1)和(x2,y2)所确定。
jreg id 1 0,0 0,15 300,15 300,0 delete ;定义节理,命名1,定义范围,四点坐标,delete为常规语言jset 90,0 5,0 5,0 5,0 0,0 rang jreg 1;Jset 命令则是自动节理组生成器。
根据所给定的特征参数(即倾角、迹长、岩桥长度、间距和空间位置)产生一组裂缝。
定义节理角度90°;节理的长度;节理的距离,即纵向间隔;横向距离,即横向隔5一个;起始点坐标为0,0jset 90,0 5,0 5,0 5,0 2.5,5 rang jreg 1 ;定义节理的另外一项gen quad 10 6 range 0 300 0 100 ;定义块体最大变形,若没有此语句,刚所有块体均为刚性块体;automatic generation of diagonally opposed triangular zones to improve plastic flow calculation.(对角三角形区域的自动生成改善塑性流动计算) Parameters xw and yw are zone widths in the x-and y-directions zone model mo range 0 300 0 100 ;定义摩尔库伦模型的范围,X的范围,Y的范围change jcons=5 range 0 300 0 100 ;定义节理的某个属性change mat=1 range reg 0,0 0,15 300,15 300,0 ;定义物质1的范围,即赋予这个范围为物质1,只赋名,没有定义属性change mat=2 range reg 0,15 0,20 300,20 300,15change jmat=1 range reg 0,0 0,15 300,15 300,0 ;定义节理1的范围set jmatdf 2 ;定义节理属性,使符合摩尔库伦准则save ch.sav ;保存文件cal prop-25.txt ;调出文件res ch.sav ;调出前面保存的文件接着计算;参数设置prop mat=1 dens=2720 ;物质的密度zone k=12.12e9 g=10.26e9 fric=33 coh=5.77e6 ten=3.6e6 range mat=1;定义物质1的体积模量、剪切模量、内摩擦角、粘聚力、抗拉强度prop jmat=1 jkn=11e8 jks=12e7 jfric=12 jcoh=0 jten=0;定义节理的属性法向刚度、切向刚度、内摩擦角、粘聚力、抗拉强度;边界条件boun stress 0 0 0 range 0,300 99.9 100.1 ;定义边界条件,三向应力为0,上边界,范围,纵向波动范围boun stress 0 0 -8.6095397e6 range ;定义边界应力条件,竖直方向的应力为,负号表示方向向下insitu str -7.5e6 0 -15e6 szz -7.5e6 ygrad 1.1018e4 0 2.203607e4 ;定义应力属性,sxx方向即水平应力,sxy方向即剪切应力,syy方向即竖直应力,szz方向的应力,ygrad应力梯度set gravity 0,-10 ;重力加速度bound xvel=0 range -0.1 0.1 0 100 ;X位移边界,位移波动范围,范围bound xvel=0 range 299.9 300.1 0 100 ;X位移边界,同上bound yvel=0 range -0.1 300.1 -0.1,0.1 ;Y位移边界hist solve_ratio type 1 ;设置不平衡力的精度,普适solve ;计算save 25-1.sav ;保存cal 25-2.txt ;调出文件res 25-1.sav ;调出前面保存的文件del 80,110 15,20;永久删除这个范围,即开挖,不可再充填,X的范围,Y的范围model null range ;变性删除这个范围,即之后可以充填物质,X的范围,Y的范围model m range ;充填这个范围,solve ;计算save 25-301.sav ;再保存,周而复始set pline 25,20 300,20 10 ;定义测线,起始点坐标,测线分段, 前两组数字表示坐标最后一个数表示布置了多少测点reset histset log on ;定义hist,保存在一个位置,在程序中输入hist1即可调出hist xdisp 10,20 ;测该点的X方向位移hist sxx 10,20 ;测该点X方向的应力hist syy 10,20 ;测该点Y方向的应力reset dispreset hist ;位移清零,历史记录清零his unbalsolve ratio 1e-5 ;记录不平衡力,计算直到精度达到1e-5ch cons=3 range 77.5,80 0,3ch mat=7 range 77.5,80 0,3 ;应变软化模型,这个是做充填用的cable (73.4,2.91) (71.15,4.99) 10 12 380e-6 11 ;锚杆,起始点坐标,后面四个数值可固定prop mat 12 cb_dens 7800 cb_ycomp 430e6 cb_yield 160e3 cb_ymod1.3e11prop mat 11 cb_kbond 6.3e9 cb_sbond 6e5;定义锚杆的属性,密度、抗拉强度、屈服强度density for block materical 1 is zero cannot cycle----块体密度未设range 范围;density 密度;volume 体积;regedit 调出注册表;pl bound pl 显示塑性区;pl bound dis 显示位移矢量图continue pa以后继续算number 可以不关udec,继续使用udecres xx.save (先调用文件)set pline x1,y1 x2,y2 n (n--观测线分的段数)set log on ;固定的set log 文件名print+pline+n+ syy sxx or xdis (观测线名称任意数字)set log off1) pl bl hist 1,2,... 观测点位移2) pl bl nu(mber) 显示块体标号3) pl bl cab red stru red cab--锚杆stru--梁4) pl bl sxx/syy/szz 显示应力图5) pl bl dis 位移矢量图6) set pl dxf 256 把UDEC 图引入CAD 换行copy 文件名自定.dxf块体力学参数k--体积模量;g--剪切模量;fric--摩擦角;coh--粘结力(内聚力);ten--抗拉强度;d--体积力接触面力学参数jkn--法向刚度;jks--切向强度;jc--粘结力;jf--摩擦角;jt--抗拉强度1) D--质量密度F--摩擦角B--体积模量; C--内聚力(粘结力) S--剪切模量2) 应力--正号代表张力,负号代表压力应变--正的应变代表伸长,负的应变代表压缩重力--正号的重力物质往下拉,负号的重力将物质往上提;内存赋值udec mudec 14print memhist yvel (20,20) type 1; type 是在屏幕上以指定的间隔显示其值step 一般典型问题要2000~4000次循环。
印能捷4.0中文教程

3 工作流程概述
17
典型的工作流程............................................................................................................................................................................................ 18 典型的导入 / 导出工作流程.................................................................................................................................................................... 20 可选的专色步骤............................................................................................................................................................................................ 21 分版本工作流程............................................................................................................................................................................................ 21 InSite 工作流程.............................................................................................................................................................................................. 21 印能捷和印能捷演化版 JDF Hub 工作流程......................................................................................................................................... 22 数字印刷工作流程 ...................................................................................................................................................................................... 22
UDEC4.0giic

菜单驱动模式运行离散元1、菜单驱动模式运行离散元对于Itasca加码图形界面是一个菜单驱动的图形界面开发,以协助助用户掌握Itasca代码。
在UDEC中,UDEC—GIIC很容易与点和点击式操作,以访问所有的命令和设施。
该GIIC结构是专门用来模拟预期的Windows功能,并允许显示的项目相对应的离散元操作的一般性鼠标性操作。
你可以能够立即使用UDEC解决问题,无须通过命令来选择你需要的分析。
本节提供了一个GIIC的介绍,并包括一个简单的教程,以帮助您开始。
你会注意到在GIIC主菜单栏中一个帮助菜单。
帮助按钮还包括在GIIC中的每一个工具,并且帮助窗格可以通过在模型工具标签上右击打开。
咨询帮助意见可以得到具体的GIIC功能的详细信息。
图1-1 UDEC—GIIC主窗口在利用UDEC进行全面的项目分析之前,我们强烈建议你阅读离散元用户指南和核查问题和示例应用程序,从而对离散元模型、分配材料特性、模型的初始条件和计算程序获得一个一般性的认识和理解。
1.1进入GIIC并选择分析选项在开始/程序/Itasca/udec菜单中,当UDEC加载时,你可以选择“UDEC 4.01 with GIIC”,自动启动GIIC。
或者,您可以在打开UDEC时,如果你在文本模式下,你可以在“udec>”提示下键入“giic”命令。
GIIC主窗口如图1.1所示。
该代码名称和当前版本号印在标题栏中的窗口顶部,主菜单栏位于标题栏下方的位置。
在主菜单栏下方有两个窗口:一个资源窗口和一个模型视图窗口。
资源窗口包括四个以文本为基本信息的标签。
“console”(控制台)标签显示文本输出和允许命令行输入(在窗口的底部)。
“record”窗口显示生成当前模型项目状态的命令的记录。
该记录以“项目树”的形式,显示保存文件之间的变化。
保存状态显示在树状结构。
数据可以作为离散元组命令形式导出到数据文件,命令组代表所分析的问题。
“FISH”窗口可以打开FISH编辑器,能方便执行FISH的功能。
UDEC指令 基本命令
;newtitle moni ;定义名称moni块体都有“圆角”,其目的在于避免块体悬挂在有棱角的节点上。
由于块体悬挂引起应力集中。
然而,圆角值存在与模型有关的上限值。
对于变形块体,最大圆角长度应当不超过块体平均棱长的1%。
圆角长度可以如下命令加以改变:round dround=0.025;d 是圆角距离(缺省值是d=0.5)。
模型中的所有圆角长度都是相同的。
For example, if the commands SET edge 0.4and ROUND 0.1 are specified, then block edge lengths smaller than 0.4 will not be created, and the rounding length for blocks will be 0.1. These commands must be given before the BLOCK command.set ovtol=1;块体与块体之间相互嵌入量最大值为1米bl 0,0 0,100 300,100 300,0 ;定义范围,四点坐标,顺时针方向cr 0,15 300,15;Crack 命令用于产生块体中单一直线特征的裂缝,裂缝由端点坐标(x1,y1)和(x2,y2)所确定。
jreg id 1 0,0 0,15 300,15 300,0 delete ;定义节理,命名1,定义范围,四点坐标,delete为常规语言jset 90,0 5,0 5,0 5,0 0,0 rang jreg 1;Jset 命令则是自动节理组生成器。
根据所给定的特征参数(即倾角、迹长、岩桥长度、间距和空间位置)产生一组裂缝。
定义节理角度90°;节理的长度;节理的距离,即纵向间隔;横向距离,即横向隔5一个;起始点坐标为0,0jset 90,0 5,0 5,0 5,0 2.5,5 rang jreg 1 ;定义节理的另外一项gen quad 10 6 range 0 300 0 100 ;定义块体最大变形,若没有此语句,刚所有块体均为刚性块体;automatic generation of diagonally opposed triangular zones to improve plastic flow calculation.(对角三角形区域的自动生成改善塑性流动计算) Parameters xw and yw are zone widths in the x-and y-directions zone model mo range 0 300 0 100 ;定义摩尔库伦模型的范围,X的范围,Y的范围change jcons=5 range 0 300 0 100 ;定义节理的某个属性change mat=1 range reg 0,0 0,15 300,15 300,0 ;定义物质1的范围,即赋予这个范围为物质1,只赋名,没有定义属性change mat=2 range reg 0,15 0,20 300,20 300,15change jmat=1 range reg 0,0 0,15 300,15 300,0 ;定义节理1的范围set jmatdf 2 ;定义节理属性,使符合摩尔库伦准则save ch.sav ;保存文件cal prop-25.txt ;调出文件res ch.sav ;调出前面保存的文件接着计算;参数设置prop mat=1 dens=2720 ;物质的密度zone k=12.12e9 g=10.26e9 fric=33 coh=5.77e6 ten=3.6e6 range mat=1;定义物质1的体积模量、剪切模量、内摩擦角、粘聚力、抗拉强度prop jmat=1 jkn=11e8 jks=12e7 jfric=12 jcoh=0 jten=0;定义节理的属性法向刚度、切向刚度、内摩擦角、粘聚力、抗拉强度;边界条件boun stress 0 0 0 range 0,300 99.9 100.1 ;定义边界条件,三向应力为0,上边界,范围,纵向波动范围boun stress 0 0 -8.6095397e6 range ;定义边界应力条件,竖直方向的应力为,负号表示方向向下insitu str -7.5e6 0 -15e6 szz -7.5e6 ygrad 1.1018e4 0 2.203607e4 ;定义应力属性,sxx方向即水平应力,sxy方向即剪切应力,syy方向即竖直应力,szz方向的应力,ygrad应力梯度set gravity 0,-10 ;重力加速度bound xvel=0 range -0.1 0.1 0 100 ;X位移边界,位移波动范围,范围bound xvel=0 range 299.9 300.1 0 100 ;X位移边界,同上bound yvel=0 range -0.1 300.1 -0.1,0.1 ;Y位移边界hist solve_ratio type 1 ;设置不平衡力的精度,普适solve ;计算save 25-1.sav ;保存cal 25-2.txt ;调出文件res 25-1.sav ;调出前面保存的文件del 80,110 15,20;永久删除这个范围,即开挖,不可再充填,X的范围,Y的范围model null range ;变性删除这个范围,即之后可以充填物质,X的范围,Y的范围model m range ;充填这个范围,solve ;计算save 25-301.sav ;再保存,周而复始set pline 25,20 300,20 10 ;定义测线,起始点坐标,测线分段, 前两组数字表示坐标最后一个数表示布置了多少测点reset histset log on ;定义hist,保存在一个位置,在程序中输入hist1即可调出hist xdisp 10,20 ;测该点的X方向位移hist sxx 10,20 ;测该点X方向的应力hist syy 10,20 ;测该点Y方向的应力reset dispreset hist ;位移清零,历史记录清零his unbalsolve ratio 1e-5 ;记录不平衡力,计算直到精度达到1e-5ch cons=3 range 77.5,80 0,3ch mat=7 range 77.5,80 0,3 ;应变软化模型,这个是做充填用的cable (73.4,2.91) (71.15,4.99) 10 12 380e-6 11 ;锚杆,起始点坐标,后面四个数值可固定prop mat 12 cb_dens 7800 cb_ycomp 430e6 cb_yield 160e3 cb_ymod1.3e11prop mat 11 cb_kbond 6.3e9 cb_sbond 6e5;定义锚杆的属性,密度、抗拉强度、屈服强度density for block materical 1 is zero cannot cycle----块体密度未设range 范围;density 密度;volume 体积;regedit 调出注册表;pl bound pl 显示塑性区;pl bound dis 显示位移矢量图continue pa以后继续算number 可以不关udec,继续使用udecres xx.save (先调用文件)set pline x1,y1 x2,y2 n (n--观测线分的段数)set log on ;固定的set log 文件名print+pline+n+ syy sxx or xdis (观测线名称任意数字)set log off1) pl bl hist 1,2,... 观测点位移2) pl bl nu(mber) 显示块体标号3) pl bl cab red stru red cab--锚杆stru--梁4) pl bl sxx/syy/szz 显示应力图5) pl bl dis 位移矢量图6) set pl dxf 256 把UDEC 图引入CAD 换行copy 文件名自定.dxf块体力学参数k--体积模量;g--剪切模量;fric--摩擦角;coh--粘结力(内聚力);ten--抗拉强度;d--体积力接触面力学参数jkn--法向刚度;jks--切向强度;jc--粘结力;jf--摩擦角;jt--抗拉强度1) D--质量密度F--摩擦角B--体积模量; C--内聚力(粘结力) S--剪切模量2) 应力--正号代表张力,负号代表压力应变--正的应变代表伸长,负的应变代表压缩重力--正号的重力物质往下拉,负号的重力将物质往上提;内存赋值udec mudec 14print memhist yvel (20,20) type 1; type 是在屏幕上以指定的间隔显示其值step 一般典型问题要2000~4000次循环。
FANUC0i Mate-TB数控车床VNUC4.0操作手册

FANUC0i Mate—TB数控车床第一章数控系统面板1.1 数控系统面板1.2 键盘说明名称功能说明复位键按下这个键可以使CNC 复位或者取消报警等.帮助键当对MDI键的操作不明白时,按下这个键可以获得帮助。
软键根据不同的画面,软键有不同的功能.软键功能显示在屏幕的底端。
地址和数字键按下这些键可以输入字母,数字或者其它字符。
切换键在键盘上的某些键具有两个功能。
按下<SHIFT〉键可以在这两个功能之间进行切换。
输入键当按下一个字母键或者数字键时,再按该键数据被输入到缓冲区,并且显示在屏幕上.要将输入缓冲区的数据拷贝到偏置寄存器中等,请按下该键。
这个键与软键中的[INPUT]键是等效的。
取消键取消键,用于删除最后一个进入输入缓存区的字符或符号。
程序功能键、、:替换键:插入键:删除键功能键按下这些键,切换不同功能的显示屏幕。
光标移动键有四种不同的光标移动键。
这个键用于将光标向右或者向前移动。
这个键用于将光标向左或者往回移动。
这个键用于将光标向下或者向前移动。
这个键用于将光标向上或者往回移动.翻页键有两个翻页键。
该键用于将屏幕显示的页面往前翻页.该键用于将屏幕显示的页面往后翻页。
1。
3 功能键和软键功能键用来选择将要显示的屏幕画面.按下功能键之后再按下与屏幕文字相对的软键,就可以选择与所选功能相关的屏幕.1.3。
1 功能键:按下这一键以显示位置屏幕.:按下这一键以显示程序屏幕。
:按下这一键以显示偏置/设置(SETTING)屏幕。
:按下这一键以显示系统屏幕。
:按下这一键以显示信息屏幕:按下这一键以显示用户宏屏幕。
1.3。
2 软键要显示一个更详细的屏幕,可以在按下功能键后按软键.最左侧带有向左箭头的软键为菜单返回键,最右侧带有向右箭头的软键为菜单继续键。
1。
4 输入缓冲区当按下一个地址或数字键时,与该键相应的字符就立即被送入输入缓冲区。
输入缓冲区的内容显示在CRT屏幕的底部。
为了标明这是键盘输入的数据,在该字符前面会立即显示一个符号“>"。
ADI仿真器ADZS-HPUSB-ICE与DM-HPUSB4.0使用说明书

Blackfin & Sharc & Tigersharc仿 真 器 使 用 说 明 书 【ADZS-HPUSB-ICE】【DM-HPUSB4.0】 DM-HPUSB4.0仿真器是ADZS-HPUSB-ICE本地化升级版【测试工具】DM-KIT-GBBF548II开发板一块DM-HPUSB4.0仿真器一台型 号:YS-1015-T12S 输 出:9V2A直流电源一个型 号:GT-41062-1805-T3 输 出:5V3.6A 直流电源一个【运行环境】Visual DSP++5.0 、update9.1以上【硬件连接】 一、仿真器(DM-HPUSB4.0)连接到DM-KIT-CBBF548II开发板上。
如图1图 1 上电顺序:仿真器先上电,开发板后上电; 断电顺序:开发板先断电,仿真器后断电【软件连接】一、 打开VDSP++5.0软件,点击session选项选择创建New Session。
如图2二、 创建New Session选择处理器型号,如例使用的DM-KIT-GBBF548II开发板选择Blackfin下的ADSP BF548然后点击Next(下一步) 。
如图3三、 选择连接对象(Emulator)然后点Next,如图4四 、选择连接的仿真器型号,例子中用的是ADZS-HPUSB-ICE仿真器所以选择ADSP-BF548viaHPUSB-ICE选项点击Next;如图5五、点击Finish完成 。
如图6六、连接成功 。
如图7图7七、Session配置完成后,根据开发板型号选择代码点击图8中红色箭头所指的图标进行编译。
八、编译完成后,运行程序如图9九 、断开所有连接,关闭开发环境,先关闭开发板电源,最后关闭仿真器电源。
【提示】以上是以ADZS-HPUSB-ICE连接DM-KIT-GBBF548II开发板为例,如用其它系列的开发板在Processor10中选择。
UDEC英文说明

UDEC Version 4.0
4-2
FISH in UDEC
IBPNT
B
B
B
ALL BLOCK DATA ARRAYS
IDPNT
D
D
D
ALL DOMAIN DATA ARRAYS
ICPNT
C
C
C
ALL CONTACT DATA ARRAYS
Z
Z
Z
ALL ZONE DATA ARRAYS FOR BLOCK
UDEC Version 4.0
PROGRAM GUIDE
4-3
P
P C
CORNER ARRAY
B P
BLOCK DATA ARRAY TO NEXT BLOCK
FROM PREVIOUS BLOCK
P
C
CONTACT ARRAY
REGULAR CORNER LINKAGE REVERSE CORNER LINKAGE LINK FROM BLOCK TO CORNER LIST LIST OF BLOCKS
PROGRAM GUIDE
4-1
4 PROGRAM GUIDE
Variables in UDEC are stored in “linked lists,” which consist of addresses (the first memory location for a particular item — e.g., block or contact) and offsets, which prescribe the memory location of the variable relative to the address. The program guide contains the contents of these linked-list groups in the data structure. Figures 4.1 through 4.4 schematically show the linkage of these various groups and should assist the user in following through the data groups and parameters. Figure 4.1 shows the linked-list arrangement of the main data arrays. Figures 4.2, 4.3 and 4.4 illustrate the conventions for linkages in the block data, domain data and contact data arrays, respectively. 4.1 Linked-List Addresses and Offsets Addresses for data objects can be found using the PRINT command. In most cases, the first integer given is the address. Commands in UDEC allow commonly used real variables to be tracked (using the HISTORY command) or changed (using the CHANGE or RESET commands). It is also possible to access variables via FISH to track or change less commonly used variables, or to define a dependency of one variable on another (e.g., shear displacement-dependent joint friction; see Section 3.7.3 in the User’s Guide for an example). As mentioned in Section 2.5.6, FISH programs have access to some of UDEC ’s linked-list data structures. The global indices that point to these data structures are provided as FISH scalar variables (see Section 2.5.1). The various data blocks and the offsets of items within the blocks are contained in a series of files supplied with UDEC. These files have the extension “.FIN” (for Fish INclude file); they provide symbolic names for offsets and current numerical values (which may change in future versions of UDEC).* The “.FIN” files serve two purposes: first, they document the meanings of the various data items; second, the files may be CALLed from a data file — they automatically execute and define appropriate symbols. The symbols are all preceded by the $ sign, so that they are invisible to the casual user who gives a PRINT fish command. The FISH programmer may simply use numbers for offsets or the symbols provided in the “.FIN” files. It is better to specify offsets in symbolic form because the resulting FISH program will work correctly with future versions of UDEC, in which offsets and block sizes may be different. (Every effort will be made by Itasca to retain the same symbolic names in future versions of UDEC.) Access to the data structure is via the fmem and imem functions, as described in Section 2.5.6. Be careful to note whether the variable in the “.FIN” file is of floating-point or integer type before using these functions. Also note that uncontrolled alterations of memory contents can crash the computer. So, any operations that alter memory contents should be undertaken with care.†
噢易云桌面增强版软件V4用户手册

武汉噢易科技有限公司噢易云桌面增强版软件V4——用户手册目录声明 (4)第一章前言 (4)第二章产品组件介绍 (4)2.1产品组件介绍 (4)2.2服务器 (5)2.2.1服务器的IO通道 (5)2.2.2服务器的汇出磁盘 (5)2.2.3服务器的存储磁盘 (5)2.2.4服务器的虚拟磁盘 (6)2.2.5服务器的缓存技术 (6)2.2.6服务器的集群与HA (7)2.2.7本地磁盘缓存技术 (7)2.2.8离线模式 (8)2.2.9文件个性化 (8)2.2.10注册表个性化 (8)2.2.11域名解析的支持 (8)2.3客户端 (9)2.3.1 客户机的启动菜单 (9)2.3.2客户机的模板 (9)2.3.3客户机的分组 (9)2.3.4客户机的管理菜单 (9)2.3.5客户机的ADMIN 帐号 (11)2.3.6客户机数据管理 (11)2.4控制台 (12)第三章部署方法 (12)3.1 产品需求 (12)3.1.1 硬件需求 (12)3.1.2 软件需求 (13)3.1.3 网络需求 (14)3.3 云桌面增强版服务器安装 (14)3.3.1 安装云桌面增强版服务端 (14)3.3.2 服务端配置 (16)3.3 安装云桌面增强版客户端 (22)3.3.1 安装前的准备 (22)3.3.2 安装客户端并上传映像 (22)3.4 终端配置 (28)3.4.1 如何修改计算机名 (28)3.4.2 如何修改计算机IP,掩码,网关 (29)3.4.3 如何修改计算机MAC (29)3.4.4 如何修改计算机分辨率 (29)3.4.5 如何同步计算机时间 (29)3.4.6 如何管理USB外设 (29)3.4.7 如何个性化SID (30)3.4.8 如何更新Image数据 (30)3.4.9 如何允许计算机保存数据(写入模式) (31)3.4.10多系统供用户选择 (32)3.4.11配置计算机为私有模式(帐号模式使用) (32)3.4.12 服务器缓存 (33)3.4.14客户端本地缓存 (34)3.4.15配置计算机的文件个性化 (36)3.4.16配置计算机的注册表个性化: (37)3.4.18域名解析 (39)3.5 云桌面增强版名词解释 (39)3.5.1什么是简单包 (39)3.5.2什么是平衡包 (39)3.5.3什么是并发包 (39)3.5.4什么是个人资料包 (39)3.5.5什么是智能包 (39)3.5.6虚拟磁盘和包的关系 (39)3.5.7 包的使用及说明 (40)第四章附录 (44)4.1 多服负载平衡部署 (44)4.2多服务器热备(HA,并发包) (45)4.3启用windows AD 域支持 (47)4.4 直接挂载虚拟盘上传系统 (47)4.5 网卡集合(异构支持)实现 (49)4.6 IO映像自动同步 (49)4.7FAQ (51)第五章技术支持与服务 (52)5.1最终用户协议 (52)5.2技术支持 (52)声明欢迎使用噢易科技产品,在使用产品之前,请首先阅读本使用手册。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
菜单驱动模式运行离散元1、菜单驱动模式运行离散元对于Itasca加码图形界面是一个菜单驱动的图形界面开发,以协助助用户掌握Itasca代码。
在UDEC中,UDEC—GIIC很容易与点和点击式操作,以访问所有的命令和设施。
该GIIC结构是专门用来模拟预期的Windows功能,并允许显示的项目相对应的离散元操作的一般性鼠标性操作。
你可以能够立即使用UDEC解决问题,无须通过命令来选择你需要的分析。
本节提供了一个GIIC的介绍,并包括一个简单的教程,以帮助您开始。
你会注意到在GIIC主菜单栏中一个帮助菜单。
帮助按钮还包括在GIIC中的每一个工具,并且帮助窗格可以通过在模型工具标签上右击打开。
咨询帮助意见可以得到具体的GIIC功能的详细信息。
图1-1 UDEC—GIIC主窗口在利用UDEC进行全面的项目分析之前,我们强烈建议你阅读离散元用户指南和核查问题和示例应用程序,从而对离散元模型、分配材料特性、模型的初始条件和计算程序获得一个一般性的认识和理解。
1.1进入GIIC并选择分析选项在开始/程序/Itasca/udec菜单中,当UDEC加载时,你可以选择“UDEC 4.01 with GIIC”,自动启动GIIC。
或者,您可以在打开UDEC时,如果你在文本模式下,你可以在“udec>”提示下键入“giic”命令。
GIIC主窗口如图1.1所示。
该代码名称和当前版本号印在标题栏中的窗口顶部,主菜单栏位于标题栏下方的位置。
在主菜单栏下方有两个窗口:一个资源窗口和一个模型视图窗口。
资源窗口包括四个以文本为基本信息的标签。
“console”(控制台)标签显示文本输出和允许命令行输入(在窗口的底部)。
“record”窗口显示生成当前模型项目状态的命令的记录。
该记录以“项目树”的形式,显示保存文件之间的变化。
保存状态显示在树状结构。
数据可以作为离散元组命令形式导出到数据文件,命令组代表所分析的问题。
“FISH”窗口可以打开FISH编辑器,能方便执行FISH的功能。
项目说明显示在“Notes”窗口。
“Model-vies pane”(模型视图窗口)显示模型的图形化视图,附加标签查看可以添加到这个窗口,它显示用户自定义的图表。
在模型视图窗口上部是包含建模阶段标签的标签栏。
当你点击模型阶段标签的时候,就会打开一个工具栏,这包括访问模型工具的按钮。
在图1.1中,生成的工具栏显示在模型选项对话框后面,当在您单击工具栏按钮,这将打开一个建模阶段的工具,这些工具允许访问离散元命令来创建和运行模式。
您可以使用“View”(查看)菜单操作任何视图窗格(例如,翻转或旋转视图,增加或减少的视图大小,打开或关闭该模型轴)。
“View”菜单栏也可以在“Show”菜单栏中打开或关闭。
“Show”菜单栏在图1.1中在模型查看窗口有显示。
图1.2 模型选项对话框 图1.3 模型选项对话框中选择“cell-space detection”在“Help”菜单中,提供了GIIC操作的帮助。
菜单中包含关于GIIC的常见问题和所有GIIC 帮助文件的索引。
在“Console”窗口底部,提示行“udec>”允许直接从GIIC中输入UDEC的命令。
“Console”窗口会对你输入的命令响应(echo)。
你根本不需要使用命令行,相对于图形界面,如果你更喜欢使用命令行,这是一个快捷方式。
状态栏位于主窗口的底部,显示关于目前活动视图或者工具的信息。
对话框在图1.1GIIC主窗口和图1.2中分别有显示。
这个对话框可以识别在你的UDEC 版本中,哪些分析模式是可以使用的(请注意,C++自定义的模型是一个单独的模块,可以在额外的费用下激活)。
UDEC配置选项和逻辑联系必须在一个新的分析开始之前选定,而用户界面选项(结构单元、安全要素计算、巴顿-Bandis联合模型和流体流动分析模式)则可以在模型运行的时间进行。
在模型选项对话框中,你可以为你的分析选择一组单位。
许多参数都会被标有相应的单位,许多已经定义的数值,如重力的大小、材料库中的属性,都会转化为选定的系统。
单位系统的选择需要在分析开始之前做好。
如果您是新用户,或者只是想进行一个简单的静态分析,我们建议您单击模型选项对话框中的“OK”按钮访问基本的UDEC特征。
在这种情况下,库仑滑动和连续屈服联合模型、无论是刚体块体还是符合摩尔—库仑的各向同性弹性变形体,摩尔—库仑,应变软化,双降伏模式和遍存节理模式,都是有效的,在GIIC中执行的是静态的平面应变分析。
如果在分析过程中,你想返回,例如,增加结构单元,在主菜单中单击“File/Model Options”。
这将重新打开模型选项对话框。
1.2改变GIIC的参数选择在分析过程中,在你选择你所想要操作的模型选项之后,你可以保存这些参数选择,这样这些选择在你每次进入GIIC的时候都是有效的。
此外,你可以保存你喜欢的启动GIIC时的外观和感觉。
你可以选择你想要打开的资源窗口,以及本窗口和模型视图窗口的大小。
GIIC的外观选择是可以改变的。
打开主菜单上的“Show”菜单,改变GIIC的窗口和工具栏的外观和感觉。
一旦你感到满意,单击主菜单中的“File/Save Preferences”。
1.3建模阶段标签该模型工具可以从位于模型视图窗口上边的模型阶段标签栏进入访问。
该标签根据你建立和求解的模型的逻辑顺序进行排列。
该次序是根据解决问题的建议程序的。
建模工具描述如下。
✧该几何模型是首次通过生成选项卡的方式产生。
一个块的定义,然后分成两个或者更多的块体从而产生模型中的联合系统。
块的变形亦是通过在每个块中安装有限差分得到。
✧其次,利用材料栏目中的工具,材料模型和属性分配给模型中的块体和节理结构。
✧边界和初始条件通过“In Situ”标签赋予✧“Utility”标签提供工具来监控模型变量和访问模型结果。
✧“Settings”标签允许在分析中,设置或改变模型的全局的条件。
✧通过“Plot”标签,UDEC中所有的输出工具都可以访问。
✧利用“Run”标签,可以进行计算。
请注意,通过重新进入模型阶段标签,在解决过程中的任何点,模型的边界条件都是可以改变的。
例如,模型属性可以随时通过“Material”标签得到改变,应力或压力的改变或以通过“In Situ”标签得到。
此外,如果在模型选项对话框中,你选择“include structural elements”,在模型阶段标签中会包含一个“Structure”标签来访问该模型的结构支持。
如果在模型选项对话框中,选中“include the factor-of-safety calculati006Fn”,在“Run”工具栏中会增加一个“Solve Fos”的按钮。
如果在模型对话框中,选中“include the Barton-Bandis joint model”或“include the fluid flow analysis tools”,属性和有关这些选项的设置将会在模型工具中有效。
当你单击模型阶段标签中的任何一个,就会出现一个工具栏,提供可以访问模型工具,在其中你可以执行有关这个工具的选项。
“Build”标签工具栏显示在图1.1中。
接下来,给了一个简单的教程,提供模型工具的介绍,帮助你熟悉GIIC的选项。
1.4 一个简单的教程—GIIC的使用在本节中,一个简单的教程旨在帮助你开始使用GIIC,本教程演示了几个建模工具来创建和解决一个简单的岩土项目问题。
这个例子是一个在节理岩体中浅深度挖掘的圆形的隧道。
该岩体中含有一组间距为1.0米,倾斜角为320°的节理。
有一个与隧道斜交成230°的断层。
节理结果导致在隧道的顶端形成三角形的岩石块体,两种岩体连接类型的评价:一种是强连接的岩体,另一种是弱连接的岩体。
该隧道被立即开挖,隧道周边的两种类型的节理性岩体的位移都被监测。
首选,按照1.1节中的程序启动GIIC(如果你通过在Itasca Codes组中双击UDEC4.0中的GICC 图标加载UDEC,就可以自动启动GIIC)。
一个简单的,静态的,平面应变分析在SI单元系统中运行,在这个例子中,块体常量自动设置,通常情况下,你可以使用默认域联系(domain-logic)检测模式。
在这种情况下,如果你想监测任何块体的位移,这些块体可能从隧道顶部分离或掉落,你应该使用“cell-space detection”模式跟踪位移和下落块体的潜在接触。
你可以在模型选项对话框中单击“cell-space detection”按钮来切换检测模式(见图1.3)。
现在你可以按“OK”来保存你的设置。
当开始对项目建模时,会出现项目保存对话框,你就可以建立一个项目文件。
这个对话框见图1.4。
需要为该项目指定项目名称和文件名。
你可以单击对话框中的“?”来选择保存项目文件的目录。
你可以保存项目为“TUNNEL.PRJ”(注意“.PRJ”的扩展名是自动附加的)。
项目式文件的位置和项目文件名出现在项目文件对话框中,如图1.4所示。
该项目文件包含该项目的记录,并允许进入所有的模型保存文件,因此你可以为该分析创建不同的阶段。
你可以在该项目的任何阶段停止,以后可以通过打开项目文件(从“File/Open Project menu item”)对其保存取和打开;整个项目和相关模型保存文件都可以在GIIC中访问。
图1.4 项目保存对话框现在你可以开始创建模型了,创建初始块,你可以从“Build modeling-tool”工具单击“Bound”按钮,这个工具可以通过“BLOCK”命令创建初始模型的几何形状。
如图1.5中所示,“New block”对话框,首先进入为模型初始块定义尺寸。
块体常量,圆角边和长度和最小边的长度也是在这个对话框中设置的。
你可以在“New block”对话框中按“OK”来选区择默认值10*10和为圆角边的长度过和最小长度自动设置。
输出的块体现在显示在指定工具中。
这个例子使用SI单位,所以这个模型区域为10米*10米。
单击“View/Show axis values”菜单项来显示模型的X轴和Y轴。
见图1.6。
请注意,边界是可以改变的,通过使用这个工具还可以添加更多的角和边。
你可以按“Execute”接受现在的几何边界。
在UDEC中,“BLOCK”命令可以得到产生和执行。
GIIC返回到模型视图窗口。
图1.5 新建块体对话框图1.6 在边界工具中产生的虚拟模型在这个时候,通过单击“Cracks”按钮,可以在模型中添加节理。
(如果你想在模型中限制节理的范围,需要单击“Regions”按钮来定义分离的节理区域)。
在节理菜单上,你单击“Joint-Regular”选项按钮。
你可以在模型区的任何地方单击来定义节理的几何形状。