棒球测速系统的设计与实现
高速运动物体的速度测试系统设计

高速运动物体的速度测试系统设计姓名:班级:学号:高速运动物体的速度测试系统设计1 引言本文的主要任务是通过设计高速运动物体的速度测试系统来确定高速运动物体在在运动过程中的速度,一种基于光幕测速的高速运动物体速度测试系统。
激光光幕速度测试是利用光电检测技术实现对物体速度的非接触测试,该方法操作简便,效率高,测试范围大,精度高。
2 测速系统的工作原理高速运动物体参数测试系统主要用来测量运动物体在高速运动过程中的速度。
当运动物体穿过测速靶光幕时,进入光电探测器的光通量会发生变化,通过光电探测器将变化的光信号转化为电流信号,经触发整形后成为具有一定脉冲宽度的触发计时信号,并送计算机进展处理。
当计算机获取两个触发计时信号的间隔后,根据靶距,由测速软件进展数据处理,可得到运动物体的速度值及相关试验数据。
用两套与上述一样的靶就可构成一套区截装置,可获取运动物体通过两个光幕的时间间隔,得到运动物体的飞行的平均速度。
以天幕靶为例,当天幕靶在室外工作时,以天空为背景,由于狭缝光阑的作用,天幕镜头的视场具有一定厚度的扇形,通常称之为天幕。
一旦有物体进入天幕,遮住了进入狭缝的部分光线,通过狭缝后面的聚光系统到达光敏元件的光通量会发生变化,光敏元件会产生一个正比于光通量变化的电信号,电路将电信号放大、整形后,最后输出一个脉冲信号,触发计时仪,完成计时功能。
测速时,用两台天幕靶与一台计时仪配合(可直接连接计算机进展数据处理)。
计时仪给出飞过两靶之间间隔的时间△T,弹丸在此间隔 S内的平均速度口。
在计时仪测速中,通常称开始计时的信号为启动信号,停顿计时的信号为停顿信号。
给出启动信号或停顿信号的装称为区截装置,两信号之间的时间间隔记录装置称为计时仪靶1和靶2分别为启动信号和停顿信号的区截装置,两区截装置之间的弹道线长度L2通常称为靶距。
在计时仪测速中,第一个区截装置启动计时仪开始计时,第二个区截装置终止计时仪停顿计时。
计时仪记录的时间T代表了弹丸飞过靶距L2所经历的时间。
棒球比赛中的投手的球速监测方法
棒球比赛中的投手的球速监测方法在棒球比赛中,投手的球速是评判其投球能力和控制力的重要指标之一。
球速的监测不仅对投手个人的技术提高有着积极的影响,也对战术指导和比赛分析提供了重要的数据支持。
本文将介绍几种常见的棒球投手球速监测方法,并探讨其优缺点。
一、雷达测速仪雷达测速仪是一种常见且有效的投手球速监测方法。
它利用雷达技术来测量球的飞行速度,并在显示屏上以数字的形式展示出来。
投手只需要在投球时经过测速仪的视线范围内,即可得到准确的球速数据。
雷达测速仪的优点在于精度高、实时性强,不受外界环境因素的干扰。
但是,它的成本较高,不便于移动和携带,只适用于竞技场地等专业场合。
二、高速摄像机高速摄像机是另一种常用的投手球速监测工具。
它通过高速连拍的方式捕捉投球的每一帧图像,并通过计算每帧图像之间球的位移来计算球速。
相比于雷达测速仪,高速摄像机在成本上较为低廉,也不受场地限制,可以在更多的环境中使用。
然而,由于图像处理的时间较长,球速数据的实时性较差,不适合需要快速反馈的实战场合。
三、武器捕手测速法武器捕手测速法是一种常见的非专业场合下的球速监测方法。
该方法依赖于捕手的反应速度和准确性,通过捕手接球时的触发时间和距离来估算投手的球速。
这种方法无需专门设备,可以在训练和娱乐场合灵活使用。
但是,由于捕手的反应速度和技术水平存在差异,武器捕手测速法的数据准确性较低,仅供参考。
四、智能手机应用程序随着智能手机技术的发展,现在市面上也出现了一些专门用于监测投手球速的应用程序。
这些应用程序一般通过利用智能手机内置的加速度计和陀螺仪等传感器来实时监测球的加速度和旋转数据,从而计算出球速。
这种方法使用方便、成本低廉,且可以随时随地使用。
但是,由于智能手机传感器的精度限制,数据的准确性相对较差。
综上所述,棒球投手的球速监测方法各有优缺点。
在专业比赛中,雷达测速仪和高速摄像机等专业设备仍然是最为精确和可靠的选择。
而在非专业场合,可以根据实际需求选择武器捕手测速法或智能手机应用程序来进行球速监测。
棒球3D球路轨迹分析与重建系统
• 打擊者如果要「有效」擊中球形成安打或全壘打, 擊中球時球棒與前腳所在的平面大約與投捕手之 連線呈垂直
• 外角球應採取由內向外之推打法,內角球應採取 由外向內之「拉回式」打(「拉打」)法
棒球球路軌跡與特性 之描述(三)
• 腰部以上偏高的球被擊中易形成長打或飛球(左) • 腰部以下偏低的球被擊中易形成滾地球(右)
棒球球路軌跡與特性 之描述(四)
• 失控而偏高的球路易被擊出成為全壘打 (示範:中村隼人、上原浩治 vs 陳金鋒)
各種棒球球路之軌跡、握法 與旋轉方式(以右投手為例)
• 直球可分為四縫線握法與二縫線握法 • 四縫線直球的握法與打擊者自本壘區觀察之旋
• 伸卡球之軌跡與滑球 相反(示範:王建民)
變速球
• 變速球的幾種 握法(球不太旋 轉)
• 變速球除了會 變速外,還會 下墜(示範:松 坂大輔)
指叉球
• 指叉球(球不太旋轉) 進 入揮棒區時,下墜幅 度很大,常衍生出許 多變種球路(示範:橫 田久則)
• 螃蟹球(類似指叉球) (示範:李居冠)
下勾投法所投出的上飄球
• 問題二:如• 水平與垂直方向的視角不同,只能拍攝近 似矩形的區域範圍
• 受景深限制,距離鏡頭太遠的球,不易看 得清楚
• 像差問題
鏡頭像差之例
數位攝影機電子特性所造成的影響
• CCD或CMOS電子元件之反應速率不夠快, 易造成影像像殘留,常使得畫面不夠「乾 淨」,亦使得球路軌跡重建困難
棒球3D球路軌跡重建 與分析系統
叮噹頌 半神半聖亦半貓 英明英勇是英豪 腹中妙袋藏萬寶 吃遍天下銅鑼燒
果岭测速流程

果岭测速果岭速度是指在一定坡度与坡长结合下,在较高水平的果岭草表面上,高尔夫球滚动的距离长度,即定义为果岭速度。
果岭球速器是一个长0.9m,压成“V”形槽状的铝板条。
它有一个精确磨制的释放球的凹槽,长76cm,延伸到测速器放在地表的一端,该端的背面底部被磨平,以减少滚下球的反弹。
V形槽的内角145°,相距1.3cm的两点支撑球。
球沿槽滚下时会产生轻微的回旋,这是恒定的,对果岭速度的测定无不利影响。
释放球的凹槽的设计使得当测速器的一端从地面抬高上升到与水平方向成20°角时,球即开始滚动往下,这就保证球到达低端的速度总是相同的。
测定果岭球速所用的器材包括:一个果岭测速器、三个高尔夫球、3个球座或者是Mark、一张记录纸和测量尺。
可参照如下步骤进行测定:(一)果岭上选择一个3m×3m,较平坦的地方(检查场地水平与否的简单方法是把测速器放在果岭上,把球放在V形槽中,如果球不滚动则说明该处是水平的)。
(二)将一个球座插入选定区域的边缘,作为出发点。
把测速器的低端放在球座旁,并将它对准球要滚动的方向。
将球放在测速器上端的V槽中,测速器的低端固定不动,慢慢地抬起测速器上端,直到球开始往下、朝前滚动,停止,在该点做Mark作标记。
(三)拿尺量其长度,记录数据。
(四)如此连续重复3次,得到3个数据,取其距离的平均值A。
3次中,球的间距不超过20cm,机数值较准确。
如超出,则重新做。
(五)在(二)相反的方向重复(二)、(三)、(四)做法,得另一组平均值为B。
(六)A和B的平均值的总和的平均值C,(得到的平均值C换算成英尺,除以数据30.48),最后得到的就是果岭速度。
(七)记录测定的结果和计算。
同时记录测定的时间,风向风速,天气和果岭的状况。
基于大屏显示的曲棍球计时记分系统应用设计

③报表打印处理 : 用于打印曲棍球的各种报表。
( 3 ) 显 示 模 板 管 理
显 示 模 板 管 理 主要 是 用 于模 板 等 义 及 关 联 描 述 采 用模板 技术使 得程序实 现 、 处理 方便 、 灵活, 功 能 包
2 系统 功 能介 绍
根据 图 2 说 明 把 系 统 分 成 计 时记 分 系 统 处 理 和 显
d e v e l o p me n t c y c l e o f t h e mo d e l s i n mi l i t a y r s i mu l a t i o n s y s t e m h a v e b e c o me e me r g i n g p r o b l e ms . Di s c u s s e s a n a p p r o a c h o f d e s i g n i n g mi l i - t a y r s i mu l a t i o n s y s t e m b a s e d o n F r a me wo r k+P l u g - i n me t h o d o l o y g t o a d d r e s s t h e a b o v e p r o b l e ms . I n a d d i t i o n , b y u s i n g t h i s a p p r o a c h t o
硐 笛加 o n 1 n Q| _ 国
Ap p l i c a t i o n De s i g n o f Ho c k e y Ti mi n g a n d Re c o r d i n g Sy s t e m Ba s e d O f L a r g e Sc r e e n Di s p l a y
体育运动中的测速方法及其应用

体育运动中的测速方法及其应用艾康伟何申杰(国家体育总局体育科学研究所,北京 100061)摘要:速度是对运动技术和运动能力进行分析和评价的重要参数之一。
本文对目前应用于体育运动中的摄影摄像,分段计时,激光,雷达,全球卫星定位等5种速度测量方法及其原理进行介绍,并讨论了每一种速度测量方法所适用的范围,同时给出了一些实际应用的测试结果。
关键词:速度,摄影摄像,分段计时,激光,雷达,全球卫星定位Methods of Speed Measurement and its Applications in SportAI Kangwei et al(National Research Institute of Sport Science, Beijing, 100061, China)速度是体育运动中非常重要的生物力学参数之一,它对于运动技术的诊断、训练强度的控制有重要的作用。
速度根据物理学的定义它是一向量,即v=Δr/Δt;它不但有大小,而且有方向;它的量纲是[长度][时间]-1 ,由于长度的基本单位是米,时间的基本单位是秒,因此速度的单位可以是m/s,cm/s,km/h等。
在对速度向量进行研究分析时,首先要选择合适坐标系对速度进行描述。
常用的描述方法有直角坐标描述法、极坐标和柱坐标描述法、曲线坐标以及球坐标描述法。
最简单而又最常用的是直角坐标系,即正交的笛卡儿坐标系。
在体育运动中也通常选择直角坐标系对速度进行描述。
体育运动中所测速的对象是人体或运动器械。
根据不同运动项目特点对速度测量的要求也不同。
以田径项目的测速为例,对于短跑、跳远和三级跳的助跑所测量的是直线速度;对跳远运动员的踏跳和铅球出手就需要测量水平速度和垂直速度,即二维速度;但对于跳高的助跑和起跳就必须测量在直角坐标系中三个方向上的速度分量才能够对其技术动作进行全面的描述。
体育运动中对速度的测量方法随科学技术的进步而不断发展。
本文着重介绍几种目前运动生物力学中所应用的速度测量方法并给出一些实际的测试结果,其中激光测距和卫星定位测量方法是近期才应用于国内生物力学的研究中。
用于体育比赛测量中的平板标定系统的制作流程
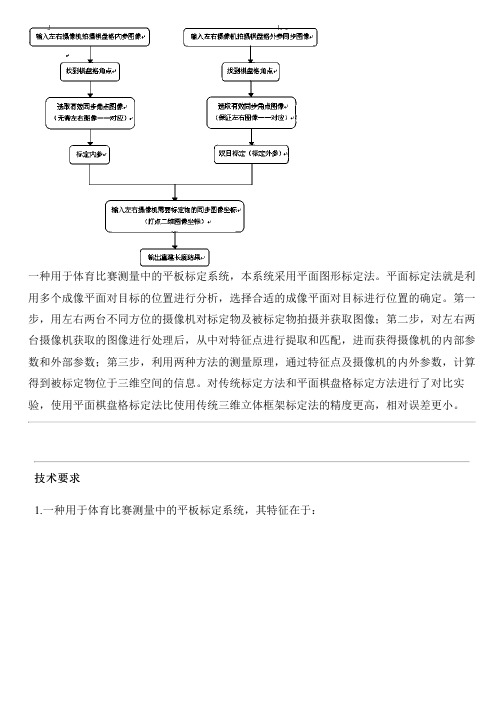
一种用于体育比赛测量中的平板标定系统,本系统采用平面图形标定法。
平面标定法就是利用多个成像平面对目标的位置进行分析,选择合适的成像平面对目标进行位置的确定。
第一步,用左右两台不同方位的摄像机对标定物及被标定物拍摄并获取图像;第二步,对左右两台摄像机获取的图像进行处理后,从中对特征点进行提取和匹配,进而获得摄像机的内部参数和外部参数;第三步,利用两种方法的测量原理,通过特征点及摄像机的内外参数,计算得到被标定物位于三维空间的信息。
对传统标定方法和平面棋盘格标定方法进行了对比实验,使用平面棋盘格标定法比使用传统三维立体框架标定法的精度更高,相对误差更小。
技术要求1.一种用于体育比赛测量中的平板标定系统,其特征在于:本系统采用平面图形标定法;平面标定法就是利用多个成像平面对目标的位置进行分析,选择合适的成像平面对目标进行位置的确定;每个平面的成像都是不同的,由于每个平面的成像都是在运动的,所以需要在摄像机与目标之间的平面内找到某几个点,来分析目标与摄像机之间的成像规律,然后根据这一规律对目标进行标定;由于对物体的标定会受到这些点的影响,随着目标的不断运动,摄像机与目标之间平面内的点就会越来越多,因而物体标定的准确度也就越来越高,从而为摄像机标定提供了可靠的信息支持,并会减少摄像机标定的成本,提高了标定的效率;相比三维立体标定法,平面标定的精确度更高,标定所用的时间相对较短,长时间使用后不会发生形变,而且携带方便,成本较低,所以平面标定法在体育测量研究领域中值得推广;摄像机模型三维重建的过程需要通过摄像机获取数据,因此需要先了解清楚摄像机的工作原理;通过摄像机,三维空间中的点能够映射到成像平面也就是二维图像上,其中映射关系可以用矩阵来表示;其中(x,y)t为摄像机成像平面中的点,(X,Y,Z)t为三维空间中的点,相较二维图像信息多了一个深度信息Z;矩阵M表示三维信息与二维信息之间的映射关系矩阵;三维信息与二维信息之间的映射关系矩阵M定义为摄像机参数,M中的各参数由实验和计算确定,求解各参数的过程称为摄像机标定;为求解上述矩阵各元素的变换关系,需建立摄像机的几何成像模型;针孔摄像机模型,又称为线性模型,是目前最简单同时也是最常用的摄像机成像模型;针孔摄像机模型在摄像机成像几何模型中,需要涉及如下三个坐标系:1)图像坐标系:以图像原点建立的以像素为单位的像素坐标系;像素的横坐标u和纵坐标v 分别是该像素所在图像中的像素的列数与行数;sx和sy分别表示数字图像一个像素的长和宽,也就是物理长度;如确定sx和sy就能得到以物理单位表示的图像坐标系;针孔摄像机模型中,xscsys坐标系即为图像坐标系,图像坐标系所在的平面称为成像平面;点p是成像平面上的一个像素点;2)摄像机坐标系:与图像坐标系不同的是,摄像机坐标系是三维坐标系;原点为摄像机光心,zc轴为摄像机光轴,与成像平面垂直,xc与yc轴分别与图像坐标系的横纵坐标轴平行;摄像机坐标只表示摄像机内部的坐标关系,所以与摄像机位置无关;Ocxcyczc坐标系为摄像机坐标系;点pc为三维空间中一个点,其成像点在成像平面上为点p;3)世界坐标系:由于摄像机坐标系只能描述摄像机内部的坐标关系,所以还需要引入一个表示摄像机位置的坐标系,也就是世界坐标系;世界坐标系的选取一般都是为了计算或者表示方便,所以并不是固定的;在双目或者多目重建时,选择其中一个摄像机坐标系为世界坐标系,也选择参照物建立世界坐标系;世界坐标系是一个三维坐标系,其原点为Ow,坐标轴分别为xw,yw,zw;以像素为单位图像坐标系中的坐标(u,v)T是像素点坐标,单位是像素,而不是物理长度坐标;使用的时候需要物理长度坐标(xs,ys)T,那么采用公式(2)计算;其中,u0和v0是图像中心偏移量;因为以像素为单位的图像坐标系原点一般是图像的左上角,而以物理长度为单位的图像坐标系时,一般以成像平面与光轴交点作为原点,这个交点的坐标为(u0,v0)t,所以可以用u0和v0作为偏移量给出;公式(1)用齐次坐标形式写出如下:另外根据相似三角形原理,得到在摄像机坐标系下,成像点所对应的空间点坐标与图像坐标系坐标变换关系:其中f为摄像机焦长度,即光心Oc到成像平面xscsys的距离;根据公式(1),将公式(3)用齐次坐标表示如下:摄像机坐标系与世界坐标系都是采用物理长度单位,两者之间的变换关系可以用旋转矩阵R和向量t来描述;世界坐标系空间中一点P的坐标为(xw,yw,zw,1)T,在摄像机坐标系下的坐标为(xc,yc,zc,1)T,那么则有如下关系:其中,旋转矩阵R是3×3的正交单位矩阵,t是3×1的平移向量,O是1×3的零向量;根据公式(4)和(5)推导出从世界坐标系中坐标点对应的图像坐标系中坐标关系:其中,αx=f/sx,αy=f/sy,M是3×4矩阵,称为投影矩阵;由上式可以看出MI完全由αx、αy、u0、v0决定,上述参数只与摄像机内部结构有关,而与摄像机位置姿态外部因素无关,因此称之为内部参数,简称内参;ME完全由摄像机相对于世界坐标系的位置姿态决定,因此称为摄像机的外部参数,简称外参;摄像机标定就是确定摄像机的内外参数的过程;摄像机标定摄像机标定是三维重建的第一步,通过摄像机标定得到摄像机内外参数以及镜头畸变参数;标定过程非常重要,如果标定得到的结果不够精确,后面的重建会受很大影响;通用的标定方法有DLT方法、Tsai定标方法、张正友标定法;张正友标定法,又称棋盘格标定法,是目前领域内广泛认可并采用的标定方法;标定的过程需要对一个已知尺寸参数的棋盘格平面进行多角度拍照,利用得到的多幅图像求解摄像机参数;令u=(u,v,1)T,X=(xw,yw,zw,1)T,对式(6)进行以下改写:其中A是3×3矩阵,即摄像机的内参数矩阵;[R t]是3×4矩阵,即摄像机的外参数矩阵,包括平移向量(3×1矩阵)和旋转矩阵(3×3矩阵);公式简化如下:zcu=HX (8)其中H=A[r1 r2 t],为3×3矩阵;这是因为所用的棋盘格为平面,选取世界坐标系zw=0,旋转向量就只剩下r1和r2两个列向量;H称为单应性矩阵,该矩阵表示三维空间中在一个平面上的点和摄像机成像平面上点之间的变换关系;成像平面上的像点选取棋盘格的内部角点,其坐标通过图像处理的方式得到,三维空间点坐标根据棋盘格尺寸参数确定;这样,每张图片对应一个单应矩阵;把单应矩阵用三个列向量形式表示,并且为了更具有普适性,加入尺度缩放因子,则有:H=[h1 h2 h3]=λA[r1 r2 t] (9)其中λ就是加入的尺度缩放因子;由于R是旋转矩阵,是单位正交矩阵,因此r1和r2是相互正交的;A是摄像机内参数矩阵,是可逆的,有:令:因为B矩阵是一个对称矩阵,所以又用一个6维向量来表示:b=(B11,B12,B22,B13,B23,B33)T (13)令H矩阵的第i列向量为:hi=(hi1,hi2,hi3)T (14)则有:其中:vij=[hi1hj1,hi1hj2+hi2hj1,hi2hj2,hi3hj1+hi1hj3,hi3hj2+hi2hj3,hi3hj3]T (16)最后,根据内参数限制条件(10)、(11)得:内参数限制条件中的h1和h2通过单应矩阵求得;单应矩阵H为3×3矩阵,共有9个参数,其中一个是尺度因子,只需要求解8个参数;每个视场对应一个单应矩阵,只需要提供四个角点信息即可求解,每个角点的x和y坐标提供一个方程;可见,每张照片对应两个方程组,摄像机内参数共有5个未知数,只要提供多于3张照片即可求得;当标定拍照图像较多时,采用列文伯格-马夸尔特迭代算法进行优化求解;当求解出b向量后,根据(10)反求解出摄像机内参数矩阵A;当求解出矩阵A后,进而计算出摄像机的外参数:通过上面的过程,就可以求解出摄像机的内外参数,进一步就可以求出畸变参数。
棒球比赛的技术创新

棒球比赛的技术创新现代棒球作为一项具有悠久历史的运动,在技术方面一直在不断创新和发展。
技术创新不仅改变了比赛的方式,提高了运动员的表现水平,还为观众带来了更多的乐趣和娱乐价值。
本文将介绍一些棒球比赛中的技术创新,并探讨其对比赛的影响。
一、球场技术创新球场是棒球比赛不可或缺的组成部分,各种技术创新将球场打造成更适合比赛的环境,提升了比赛的观赏性和公平性。
首先,现代球场采用了人工草皮,以提供更好的球场质量和一致的球速。
其次,球场上的计分板和大屏幕显示技术提供了实时比分和重播功能,让观众能够更好地了解比赛进展。
此外,球场还引入了荧光灯照明和室内球场技术,使得比赛不再受天气和时间的限制,为球员和观众创造了更好的比赛环境。
二、装备技术创新棒球比赛中的装备也经历了技术创新的改变。
首先是球棒的创新,现代球棒采用轻质材料制作,如铝合金和碳纤维等,增加了球棒的强度和弹性,提高了击球距离和速度。
其次是球场上的防护装备,如头盔、护肘和护胸等。
这些装备利用先进的材料和设计,提供了更好的保护,减少了受伤的可能性。
最后是投手手套和接球手套的创新,新材料和设计提供了更好的握力和接球技术,使得投手和接球手能够更好地控制球的旋转和速度。
三、数据分析技术创新随着信息技术的发展,数据分析在棒球比赛中起到了重要的作用。
现代棒球比赛采用了各种传感器和摄像设备,实时记录并分析球员的动作和数据。
这些技术创新使得教练和球队管理者能够更好地了解球员的表现和能力,从而进行更有针对性的训练和战术安排。
此外,数据分析还为观众提供了更多的统计信息和战术分析,使得观众能够更好地理解比赛,并享受更深入的观赏体验。
四、视频回放技术创新现代棒球比赛采用视频回放技术,使得裁判员能够更好地判定争议性的球员和规则违例情况。
这项技术创新提高了比赛的公正性,减少了误判的可能性,同时也引发了更多的讨论和争议。
而观众也通过视频回放,在不同角度和慢动作的展示下,更好地了解比赛中发生的关键瞬间,增加了观赏的乐趣。
棒球比赛中的球路判断与反应速度

棒球比赛中的球路判断与反应速度棒球是一项需要高度集中和敏捷反应的运动,球员们必须准确地判断球路并迅速做出反应。
在比赛中,球路的判断和反应速度往往决定了球员能否成功击球或抓住出局机会。
本文将探讨棒球比赛中球路判断的重要性以及如何提高反应速度。
一、球路判断的重要性在棒球比赛中,球路判断的准确性直接影响着球员的表现。
准确判断球路可以帮助球员更好地控制棒球的击打方向和力度,从而增加得分的机会。
同时,对于场上守备的球员来说,准确判断球路可以帮助他们迅速移动到合适的位置,拦截或接住棒球,从而完成击球手的出局或抓住投手的失误。
准确判断球路的能力需要球员具备良好的观察力和专注力。
球员应该密切关注投手的出手动作、手部姿势和球的旋转方向等细节。
同时,他们还需要根据比赛的环境因素,如风向、阳光照射等,进行综合判断,并快速做出应对。
只有通过不断的练习和观察才能提高球员的球路判断能力。
二、提高反应速度的方法1. 训练眼球追球能力:球员可以通过训练眼球的追球能力来提高自己的反应速度。
这可以通过观察并追踪快速移动的物体(如乒乓球、网球等)来实现。
这样可以帮助他们更好地适应球的速度和方向,进而进行准确的球路判断和迅速的反应。
2. 强化身体协调能力:身体协调能力是影响反应速度的重要因素之一。
球员可以通过进行一些身体协调训练来提高自己的反应速度。
例如,进行平衡训练、灵活性训练和手眼协调训练等,这些训练可以帮助球员更好地应对各种球路变化和突发情况。
3. 创造真实的比赛环境:球员可以通过模拟真实比赛情况来提高自己的反应速度。
他们可以与队友或教练进行实时练习,模拟比赛中的不同场景。
例如,进行实战演练,让球员在不同位置迅速做出反应,或进行快速投球练习,让球员在有限的时间内做出准确的球路判断。
4. 观看比赛录像和学习他人经验:观看比赛录像可以帮助球员更好地理解球路判断和反应速度的重要性。
通过观察他人在比赛中的表现,球员可以学习他们的技巧和策略,并在实际训练中加以应用。
棒球测速系统的设计与实现

棒球测速系统的设计与实现杨卓【摘要】本文应用芯片技术设计了棒球测速系统,首先阐述了该系统的工作原理,并对系统需求进行了分析,然后设计了硬件系统和软件系统,硬件系统的加速度传感器采用ADXL345,单片机采用ST7LITE49M,软件系统主要设计了1COSMIC C编译器,最后对该系统进行了系统测试,结果较满意。
%In this paper,chip technology designed baseball speed system,first elaborated the working principle of the system,and the system requirements are analyzed, and then design the hardware and software systems,hardware acceleration sensor system uses ADXL345, SCM ST7LITE49M,software system designed 1COSMIC C compiler,and finally the system were systematically tested with satisfactory results.【期刊名称】《电子测试》【年(卷),期】2014(000)022【总页数】2页(P31-32)【关键词】棒球;测速系统;ADXL345【作者】杨卓【作者单位】陕西学前师范学院体育系,陕西西安,710100【正文语种】中文由于棒球在运动过程中还要受到空气阻力和地球的重力作用,所以它的运动是一个复杂的过程。
为了提高击球员的水平,本文设计了棒球的测速系统,旨在为他们的培训提供理论参考。
在棒球击球员的挥棒过程中,其物质运动是一个持续过程,是一个多维空间的连续运动。
在击球员击球的瞬间,棒球的速度为零,并且棒球的加速度和速度持续增大,直到其达到速度的最大值再到棒球的速度为零,在这个过程中,棒球上的每个点的运动状态都不相同。
高速运动物体的速度测试系统设计1

高速运动物体的速度测试系统设计题目:高速运动物体的速度测试系统设计工作原理光电检测的方法技术指标 1.速度约1000m/s2.测试精度误差小于5‰3.测量区域直径(Diameter)大于500mm作业要求给出光学系统、测试系统、电路系统的设计思想和方法说明必要的工作原理摘要:提出了一种基于光幕测速和单片机数据处理的高速运动物体速度测试系统。
采用半导体激光器、光电探测器、原向反射屏形成大面积光幕测试区,当高速运动物体穿越光幕时,光通量的变化被光电探测器转变为电信号,经过比较电路后送入单片机进行数据处理,并由LED进行速度显示。
1 引言高速运动物体速度测试是指测试运动物体在飞行运动过程中特定某一点所具有的瞬时速度,其大小不仅与物体发射条件和发射过程有关,而且也与物体本身的物理参数、气动参数等相关参数有关。
对于高速飞行物体速度的测试,有许多方法,如网靶使用范围广,但测试精度差,成本高,测试效率较低;线圈靶使用方便,但受外界影响较大,尤其易受电磁干扰。
为了有效提高测速系统的使用范围和灵活性,降低成本,根据高速运动物体测试场合,测试特点等方面的要求,现提出了采用激光光幕测试技术来实现对弹丸速度的测试。
激光光幕速度测试是利用光电检测技术实现对弹丸速度的非接触测试,该方法操作简便,效率高,测试范围大,精度高,且不受天气的影响。
2 系统结构及原理概述激光光幕测速是通过测试高速运动物体穿过两光幕问的时间间隔△£及两光幕间的距离s,由口=s/出获得其平均速度,系统原理图如图l所示。
由启动光幕和停止光幕组成区截,当高速运动物体飞过各光幕时,分别阻挡部分光线,光电探测器将相应的光信号转换成电信号,经过信号处理后,送入单片机进行数据处理,最后将精确计算得到的速度值显示在LED上。
运动物体速度测试系统主要由光学设计单元、信号处理单元及数据采集、显示单元组成,系统框图如图2所示。
3 光学系统设计光学设计单元主要完成光幕的建立和运动物体通过光幕时光信号的采集,如图3所示。
棒球自动发球机的设计

棒球自动发球机的设计介绍本文档旨在设计一种棒球自动发球机,使棒球运动爱好者能够练击球技巧而不需要其他人的帮助。
该发球机应具备可靠稳定的发球性能,并具备一定的安全保护措施。
设计要求1. 发球机需要能够准确地发射棒球,并且能够调整发射速度和角度。
2. 发球机需要稳定地支撑在地面上,并且能够防止运动时移动或倾斜。
3. 发球机需要有合适的储球装置,以便储存多个棒球,并能够自动加载球。
4. 发球机需要具备安全保护措施,例如安全开关、保护罩等,以确保使用者的安全。
5. 发球机需要简单易用,操作方便,即使对于没有使用过类似机器的人也能快速上手。
发球机结构该发球机的结构应包括以下几个主要部分:1. 机架:用于支撑和固定整个发球机的结构,应选择坚固耐用的材料制作。
2. 测速装置:用于测量发球速度,并根据需要调整发射速度。
3. 发射装置:包括电机、发射器和发射装置的控制系统。
电机用于提供动力,发射器用于推动棒球发射,控制系统用于设定发射速度和角度。
4. 储球装置:用于储存多个棒球,并能够自动加载球到发射装置中。
5. 安全保护装置:包括安全开关、保护罩等,用于确保使用者的安全。
使用方法使用者可以按照以下步骤操作发球机:1. 将发球机稳定地支撑在地面上。
2. 打开发球机的电源,并确保安全开关处于关闭状态。
3. 将棒球放入储球装置中,并确保装置能够自动加载球。
4. 调整发球机的发射速度和角度,根据自己的需要设定。
5. 打开安全开关,发球机将开始发射棒球。
6. 使用者可以站在适当的位置上准备击球,并注意自身安全。
注意事项使用发球机时需要注意以下几点:1. 使用者应穿着适当的护具,以防止意外伤害。
2. 不要将手部或其他身体部位放入发射装置内,以免发生意外。
3. 发球机应放置在平坦的地面上,并且稳固地固定,以确保发球机运行时不会移动或倾斜。
4. 发球机只能由合适的人员操作,禁止儿童单独使用。
以上是对棒球自动发球机设计的简要介绍和要求。
COR电脑系统棒垒球反弹系数试验机操作指导书

3.2棒垒球反弹系数试验操作
3.2.1首先根据试验产品输入相对应名称,带上相应的防护用具。
3.2.2点击装配气缸拉回,再点击缓冲气缸拉回,然后点击开始测试。期间,电脑会提醒操作员注意事项,操作员需要再次观察试验机周围是否有无关人员接近以及气压是否稳定,再点击确认。
东莞市森鑫橡胶制品有限公司
COR反弹系数试验机操作指导书
编号
版本
页次
1/1
1.目的
测试长曲棍球的反弹数值。
2.适用范围
适用于橡胶圆球体的反弹测试。
3.内脑。
3.1.1打开COR电脑系统棒垒球反弹系数试验机,再打开相应的测试软件。
3.1.2选取相应的待测试曲棍球,并作检查、检查测试的曲棍球有无其他问题,然后再根据曲棍球的尺寸选取相应的套具并将套好曲棍球的套具放入发射筒。
3.2.3静待测试结果出现等待测试结果出现,就可以知道测试产品是否符合标准。
3.2.4如果需要多次测试产品,则按以上步骤进行。若是想把测试结果保存,则点击测试报告选项,再将测试报告保存至相应区域。
批准
编制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
棒球测速系统的设计与实现Design and Implementation of A Batting Velocity Measuring System刘淑君 严利民(上海大学微电子中心,上海 200072)摘 要介绍了利用加速度传感器芯片设计棒球的测速系统的实现方法,该设计能够准确地实现数据的采集和处理,最终得出击球者的速度值。
关键词加速度传感器积分Abstract The implementing method of designing a batting velocity measuring system with an acceleration sensing chip is described. This system can acquire and process data accurately, thus providing batting velocity measurements.Keywords Acceleration Sensor Integration0 引言在棒球运动中,通过套在击球棒上的加速度环可以检测新手的举棒和挥棒姿势是否正确,并通过语音系统给予确认、报速和纠正。
该加速环主要通过mcu采集加速度值,经处理后最终输出速度值和帮助信息两部分数据。
在这个系统中,我们主要采用积分的思想来完成速度值的计算。
该测速系统的原理图如图1所示。
图1 测速系统原理图测速系统首先判断测速环是否摆正,完成击球后输出击球声,1分钟后没有任何操作则自动关闭电源。
而算法的关键在于速度值的计算以及各个过程的衔接。
1 测速系统建模2.1 测速原理在棒球运动中,击球员的挥棒过程是一个多维空间的连续物理运动过程。
随着击球员的迅速加速,到速度达到最大值,直到瞬时停止,该棒上的各点运动状态都不完全相同。
但是普通击球员(非专业人士)的实际挥棒速度一般可维持在50~90英里/小时.因此,我们可以对该运动过程作如下的近似处理:①忽略该击球棒的长度,将其各点的运动状态看成近似相同的,所以整个棒的运动过程即为一个点的二维空间运动;②因为击球的过程短暂,所以假定速度的最大值发生在加速度为零的时候,并且是水平加速度为零的时候;③ 将该击球棒的运动轨迹近似成类似抛物线的曲线,则其最终输出的速度值应该为“加- 1 -- 2 -速度—时间”函数曲线的X 轴上方的积分;④速度的最大值还必须是水平与垂直方向的矢量合成。
根据以上的假设,我们可以得到该模型的数学表达式及如图2所示的运动轨迹图形。
y x a a a G G G +=;y x v v v G G G +=dt a dt a t 0y t0 x ∫∫+=G G )a a (t yi n0i xi G G +Δ=∑= (i = 采样的点数)(在本设计中取△t 为30ms )1.2 加速度传感器芯片工作原理本系统应用的传感器是MEMSIC 公司的MXA2050A 。
该器件是基于单片CMOS 集成电路制造工艺而生产出来的一个完整的双轴加速度测量系统。
就像其他加速度传感器有重力块一样,MEMSIC 器件以可移动的热对流小气团作为重力块。
器件通过测量由加速度引起的内部温度的变化来测量加速度。
在加速度传感器内部有两条完全相同的加速度信号传输路径:一条用于测量X 轴上所感应的加速度;另一条则用于测量Y 轴上所感应的加速度。
另外,该加速度传感器可用于倾角的测量以纠正击球棒的摆放位置。
加速度传感器通过感知地球重力加速度在其测量轴上的份量大小来确定物体的倾斜角度[1]。
在该棒球测速系统中,加速度芯片如图3所示竖直安置在pcb 板上,芯片的X 轴和Y 轴在360º内都能准确地检测出加速度值及其倾斜角。
计算倾角的时候,有如下计算公式:)/(sin )/(sin sin()sin(11g A g A a g A a g A y x y x −−==)⋅=⋅=ββ1.3 单片机的工作原理在本测速系统中,我们采用意法半导体公司的ST7LITE29单片机接收来自加速度传感器MXA2050A 的加速度值,并在该单片机的编程中完成系统任务的算法实现,最终驱动一块语音芯片,报出速度值。
ST7LITE29是基于工业标准的内核为8位的CPU ,CPU 中具有6个内部存贮器。
该单片机上还配有低压检测器、看门狗、高抗噪性的电磁兼容电路等。
另外,通过编程可实现读/写保护、多种低功耗模式等。
片上外设包括10位7通道的A/D 转换器、SCI 、USB 和CAN 图2 击球棒运动轨迹图图3 加速度芯片的安置角度接口,还有2个8位定时器、1个看门狗定时器和1个12位自动重装载定时器[2]。
复位和时钟电路可以不用任何外部器件,内部的低压检测器和一个完整的1%RC振荡器就能够确保充分安全地启动单片机工作,从而使其应用成本降至最低。
该片单片机的指令系统在占用存贮空间和运行方面效率都比较高,其中断响应时间典型值为1.5μs。
因此不论用C语言还是汇编语言编程都能方便地产生高效率的代码[3]。
此单片机使用过程中最关键的部分在于数据的采集和中断的设置。
数据采集用到了5个A/D采样口(两个双轴加速度值,一个灵敏度模拟电压输出,两个开关检测),结合中断点的设置,能够准确地实现30ms采样一次,并最终控制速度输出延时在3s内完成。
由于加速度芯片的绝对输出零加速度值对应1.25V,其精度为50mv/g,而CPU的采样精度约为4.5mv,最终输出精度约为5g, 这对于此系统的应用是远远不够的,因而加速度芯片的输出必须外接一个放大倍数为2.5的放大器(LM358P),则其精度可提高到1g。
2 测速系统的软件实现2.1 1COSMIC C编译器该测速系统软件编程采用的是ST的专用编程软件STVD7 for inDART—STX,用COSMIC C语言编写整个流程。
用于ST7单片机的COSMIC C编译器可读取C源文件、汇编源文件以及机器代码文件,最终生成可执行文件。
在编译的过程中,可以列表出该编译器编译C文件后生成的汇编源文件和机器代码文件。
也可以通过此编译器产生一个包含编译信息的模块[2]。
COSMIC C的编译器内部包含了许多程序来编译C源文件以生成可执行文件和列表。
同时,CXST7可以自动控制这些程序的操作,用户也可以选择某些特定的选项以完成所需要的快捷功能。
COSMIC C编译器除了可以使用其自带的库进行编译外,还可以使用用户自己定义的库参与程序的编译,并且可以选择性地生成一个错误信息文件帮助用户修改代码。
该系统算法的流程图如图4[4]所示。
2.2 LITE定时器的使用由于测速系统采样需要精确到30ms/次,以及1分钟的系统自动关闭,所以采取定时器中断来实现这一要求。
如上所述ST7LITE29有多个定时器,这里我们选取其中的LITE定时器。
它具有通用的定时功能、看门狗功能和输入捕获功能。
它包括1个循环运行的8位递增计数器和1个8位输入捕获寄存器,计数器有2种时间周期可通过软件选择。
实时时钟功能是指当单片机复位后,它以f osc/32的频率从0开始自动递增。
当计数器从F9h回到00h时会产生一次计数器溢出。
若f osc=8MHz,则2次计数器溢出之间的时间为1ms或2ms。
这个周期可通过设置图4 算法实现的流程图- 3 -LTCSR寄存器中的TB位选择时间间隔来实现。
当计数器溢出时,由硬件设置TBF位为1,并且若设置TBIE位为1,就会产生一次中断请求。
读LTCSR寄存器可清除TBF位。
由于LITE定时器总是可以产生一个固定不变的时间溢出值(1ms或2ms),因而可把它作为一个时间基准用于计时。
看门狗功能是一个软、硬件相结合的重要而常用的抗干扰技术。
当程序跑飞到一个未知的或错误的死循环中时,冗余指令和软件陷阱都将无能为力,系统将完全陷入瘫痪。
“看门狗”能监视系统的运行状况,并在干扰使程序跑飞的情况下,强制系统复位退出死循环。
为确定WDT的定时周期,首先应确定应用系统完成一次正常循环所需要的时间,还需要知道在错误状态下能坚持多长时间。
通常监控定时周期的选择最好是正常时间的1.5~4倍。
输入捕获功能在PA0/LITEC引脚检测到一个上升沿或下降沿后,8位输入捕获寄存器用来锁存递增计数器的值。
如果设置ICIE为1,则输入捕获产生时会触发一个中断,此时ICF 为1。
读LTICR寄存器可清除ICF位。
LITE定时器的中断是通过设置LTCSR寄存器中的相关位实现的。
如果LTCSR寄存器中设置TBIE位为1,则允许产生定时周期中断;如果LTCSR寄存器中设置ICIE位为1,则允许产生输入捕获中断。
用RIM指令清除CC寄存器中的中断屏蔽位(I)后,当相应的中断事件发生时,硬件会产生相应的中断。
3 结束语通过对整个设计的不断修改以及硬件上的调试和软件的编程,最终输出的速度值误差能控制在0.1英里/时,并且整个过程能在3s内完成,实现了测速系统的目标。
以上方法在ST公司的inDART--STX环境中已经调试成功。
参考文献1 MEMSIC MXA2050A..Rev. F. 20052 ST ST7LITE2.REV.2.0.August 20033 张迎新,雷文,陈胜,迟明华.ST7通用单片机原理及应用.北京航空航天大学出版社,20044 严蔚敏,吴伟民.数据结构(C语言版).清华大学出版社,1997第一作者刘淑君,女,1982年3月生,上海大学微电子中心微电子学与固体电子学专业在读硕士研究生,主要从事集成电路的开发与研究。
- 4 -。