《形状和位置公差国家标准图解》
形状和位置公差国家标准 ppt课件
直线度公差
形状和位置公差国家标准
圆度公差
形状和位置公差国家标准
圆柱度公差
形状和位置公差国家标准
平面度公差
形状和位置公差国家标准
线轮廓度公差
形状和位置公差国家标准
面轮廓度公差
形状和位置公差国家标准
三坐标相关知识
形状和位置公差国家标准
形状和位置公差国家标准
平行度公差
形状和位置公差国家标准
精品资料
平行度公差
形状和位置公差国家标准
垂直度公差
形状和位置公差国家标准
垂直度公差
形状和位置公差国家标准
同轴度公差
形状和位置公差国家标准
对称度公差
形状和位置公差国家标准
位置度公差
形状和位置公差国家标准ห้องสมุดไป่ตู้
位置度公差
形状和位置公差国家标准
位置度公差
形状和位置公差国家标准
位置度公差
形状和位置公差国家标准
倾斜度公差
形状和位置公差国家标准
倾斜度公差
形状和位置公差国家标准
倾斜度公差
形状和位置公差国家标准
圆跳动公差
形状和位置公差国家标准
圆跳动公差
形状和位置公差国家标准
全跳动公差
形状和位置公差国家标准
形状与位置公差详解 (稻谷文苑)

实用内容
22
形状和位置公差(几何公差)
四种要素之间的关系为:
单一要素
被测要素
要素
关联要素
GB 13319 - 91 位置度公差 所有这些标准的贯彻和实施,都对振兴我国的机械
工业、提高生产技术水平和生产过程的经济性发挥了
良好的促进作用。
实用内容
9
形状和位置公差(几何公差)
近年来,为遵循与国际标准接轨的原则,我国又 制、修订了一些形位公差国家标准。即:
《GB/T 4249-1996 公差原则》等效采用《ISO 8015:1985》代替 《GB 4249-84》。
互换形状性和位与置公测差(量几何技公差术) 基
二. 误差的表现形式
1、尺寸误差 2、几何误差 3、表面粗糙度等
实用内容
16
互换形状性和位与置公测差(量几何技公差术) 基
三. 几何误差的分类
1、形状误差 2、方向误差 3、位置误差 4、跳动误差
实用内容
17
形状和位置公差(几何公差)
一、概述
几何公差即旧标准中的“形状和位置公差” 几何公差的研究对象:几何要素。 1. 要素定义 要素是工件上的特定部位,如点、线或面。
上述例子举了影响形位精度的各主要原因,我
们必须根据具体加工条件,对影响因素进行分析,
采取有效措施,以消除或减少这些因素的影响,来
满足图样上给定的形位公差要求。
实用内容
33
形状和位置公差(几何公差)
形状和位置公差(摘自GB1182-84-80)

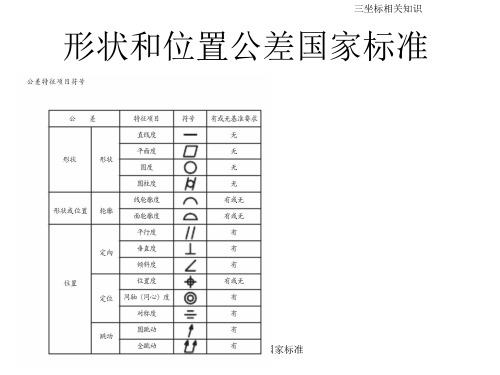
形状和位置公差(摘自GB1182-84-80)形位公差符号分类形状公差位置公差项目直线度平面度圆度圆柱度平行度垂直度倾斜度同轴度对称度位置度圆跳动全跳动符号圆度和圆柱度公差μm主参数d(D)图例公差等级主参数d(D) mm应用举例>6~10>10~18>18~30>30~50>50~80>80~120>120~180>180~250>250~315>315~400>400~5005 1.5 2 2.5 2.5 3 4 5 7 8 9 10安装E、C级滚动轴承的配合面,通用减速器的轴颈,一般机床的主轴。
6 2.5 3 4 4 5 6 8 10 12 13 157 4 5 6 7 8 10 12 14 16 18 20千斤顶或压力油缸的活塞,水泵及减速器的轴颈,液压传动系统的分配机构8 6 8 9 11 13 15 18 20 23 25 279 9 11 13 16 19 22 25 29 32 36 40 起重机、卷扬机用滑动轴承等10 15 18 21 25 30 35 40 46 52 57 63直线度和平面度公差μm主参数L图例公差等级主要参数L mm应用举例≤10>10~16>16~25>25~40>40~63>63~100>100~160>160~250>250~400>400~6305 2 2.5 3 4 56 8 10 12 15 普通精度的机床导轨6 3 4 5 6 8 10 12 15 20 257 5 6 8 10 12 15 20 25 30 40轴承体的支承面,减速器的壳体,轴系支承轴承的接合面8 8 10 12 15 20 25 30 40 50 609 12 15 20 25 30 40 50 60 80 100辅助机构及手动机械的支承面,液压管件和法兰的连接面10 20 25 30 40 50 60 80 100 120 150平行度、垂直度和倾斜度公差μm主参数L、d (D)图例公差等级主参数L、d(D)mm应用举例≤10>10~16>16~25>25~40>40~63>63~100>100~160>160~250>250~400>400~6305 56 8 10 12 15 20 25 30 40垂直度用于发动机的轴和离合器的凸缘,装D、E级轴承和装C、D级轴承之箱体的凸肩6 8 10 12 15 20 25 30 40 50 60平行度用于中等精度钻模的工作面,7~10级精度齿轮传动壳体孔的中心线7 12 15 20 25 30 40 50 60 80 100垂直度用于装F、G级轴承之壳体孔的轴线,按h6与g6连接的锥形轴减速机的机体孔中心线8 20 25 30 40 50 60 80 100 120 150平行度用于重型机械轴承盖的端面、手动传动装置中的传动轴同轴度、对称度、圆跳动和全跳动公差确定μm主参数d(D)、B、L图例公差等级主参数d(D)、B、Lmm应用举例>3~6 >6~10>10~18>18~30>30~50>50~120>120~250>250~5005 3 4 56 8 10 12 156和7级精度齿轮轴的配合面,较高精度的快速轴,较高精度机床的轴套6 5 6 8 10 12 15 20 257 8 10 12 15 20 25 30 408和9级精度齿轮轴的配合面,普通精度高速轴(100r/min以下),长度在1m以下的主传动轴,起重运输机的鼓轮配合孔和导轮的滚动面M 12 15 20 25 30 40 50 60表面粗糙度表面粗糙度R粗糙度代号光洁度代号表面形状、特征加工方法应用范围ⅠⅡ除净毛刺铸、锻、冲压、热轧、冷轧用于保持原供应状况的表面微见刀痕粗车,刨,立铣,平铣,钻毛坯粗加工后的表面可见加工痕迹车,镗,刨,钻,平铣,立铣,锉,粗铰,磨,铣齿比较精确的粗加工表面,如车端面、倒角微见加工痕迹车,镗,刨,铣,刮1~2点/cm2,拉,磨,锉滚压,铣齿不重要零件的非结合面,如轴、盖的端面,倒角,齿轮及皮带轮的侧面、平键及键槽的上下面,轴或孔的退刀槽看不见加工痕迹车,镗,刨,铣,铰,拉,磨,滚压,铣齿,刮1~2点/cm2IT12级公差的零件的结合面,如盖板、套筒等与其它零件联接但不形成配合的表面,齿轮的非工作面,键与键槽的工作面,轴与毡圈的摩擦面可辨加工痕迹的方向车,镗,拉,磨,立铣,铰,滚压,刮3~10点/cm2IT8~IT12级公差的零件的结合面,如皮带轮的工作面,普通精度齿轮的齿面,与低精度滚动轴承相配合的箱体孔微辨加工痕迹的方向铰,磨,镗,拉,滚压,刮3~10点/cm2IT6~IT8厅级公差的零件的结合面;与齿轮、蜗轮、套筒等的配合面;与高精度滚动轴承相配合的轴颈;7级精度大小齿轮的工作面;滑动轴承轴瓦的工作面;7~8 级精度蜗杆的齿面不可辨加工痕迹的方向布轮磨,磨,研磨,超级加工IT5、IT6级公差的零件的结合面,与C级精度滚动轴承配合的轴颈;3、4、5级精度齿轮的工作面暗光泽面超级加工仪器导轨表面;要求密封的液压传动的工作面;塞的外表面;活汽缸的内表面注:1. 粗糙度代号I为第一种过渡方式。
形状和位置公差定义、符号和图样表示法

图 &-
后退
!
!" # $ %%&’(%))* 摘录 返回总目录 返回分目录
后退
!
!"# 对几个表面有同一数值的公差带要求! 其表示法可按图 !" 和图 !! 所示"
图 $&
图 $$
!"! 用同一公差带控制几个被测要素时! 应在公差框格上注明 #共面$ 或 #共线$ #见图 !$ 和图 !%&%
’ 基准
&!(’% $ $$如需要! 用一个或多个字母表示基准要素或基准体系 )见图 !# 图 $ 和图 %*"
图#
图!
图$
图%
!&! 当一个以上要素作为被测要素! 如 + 个要素! 应在框格上方标明! 如 &+,’# &+ 槽’ )见图 -&" !&$ 如对同一要素有一个以上的公差特征项目要求时! 为方便起见可将一个框格放在另一个框格的下 面 )见图 +&" !&% 如要求在公差带内进一步限定被测要素的形状! 则应在公差值后面加注符号 )见表 $&"
图 ),
后退
!
!" # $ %%&’(%))* 摘录 返回总目录 返回分目录
后退
!
! 基准目标
当需要在基准要素上指定某些点! 线或局部表面来体现各基准平面时" 应标注基准目标# 基准目 标按下列方法标注在图样上$
!" 当基准目标为点时" 用 %#& 表示 $见图 %&’’ () 当基准目标为线时" 用细实线表示" 并在棱边上加 %*& +见图 %,)’ -) 当基准目标为局部表面时" 用双点划线绘出该局部表面的图形" 并画上与水平成 %./的细实线 +见图 %0)’ 基准目标代号在图样中的标注见图 %1’
形状与位置公差详解

形状和位置公差(几何公差)
2.几何要素分类
⑴ 按结构特征分为: 组成要素、导出要素。 为与相关标准的术语取得一致,新标准将旧标
准“中心要素”改为“导出要素”;“轮廓要素” 改为“组成要素”;“测得要素”改为“提取要素” 等,
19
形状和位置公差(几何公差)
2.几何要素分类
⑵ 按存在状态分为: 实际要素、公称要素 实际要素:零件上实际存在的要素。 标准规定:测量时用提取要素(测得要素)代替 实际要素。 公称要素(理论要素):具有几何学意义的要素, 即几何的点、线、面,它们不存在任何误差。图 样上表示的要素均为公称要素。
《GB/T 17852-1999 形状和位置公差 轮廓的 尺寸和公差注法》等效采用《ISO 1660:1982》。
《GB/T 18780.1-2002 产品几何量技术规范 (GPS)几何要素 1部分:基本术语和定义》 等效采用《ISO 14660-1 : 1999》。
形状和位置公差(几何公差)
《GB/T 13319-2003 产品几何量技术 规范(GPS)几何公差 位置度公差注法》 等效采用《ISO 5458: 1998》代替 《GB/T 13319-1991》 。
形状和位置公差(几何公差)
1950年起英、加拿大、美三国颁布了用文字说明标 注的形位公差标准(BS 308-1953、CSA B78.11954、ASA Y14.5-1957)。
5
形状和位置公差(几何公差)
1958年ISO发布了关于形位公差框格注法的标准推 荐草案,第一次向世界各国推荐框格注法。紧接着各 国纷纷修订本国标准。
GB 1958 - 80 形状和位置公差 检测规定
形状和位置公差(几何公差)
➢ 为了在企业很好地全面贯彻形状和位置公差的国家标
第3章讲义形状与位置公差

《
相关要素(a—ss—oci对ate基d 准要素有功能关系要求, 给出位置公差要求的要素。
互
feature)
换
0.05 (单一要素)
性
与
测
量
技
术
》
A
0.04 A
(相关要素)
3.1.2 形位公差的项目符号
武
汉
理 工
公差
特征项目
符号
有或无基 准要求
公 差 特征项目
符号
有或无基 准要求
大 学
形形
直线度
《
+0.018
φ3 5 k 6+(0 . 0 0 2 )
其余
压力角
20°
武
C
D
3.2 1.6
3.2
精 度 等 级 7-6-6GM
3.2
汉
1.6
1.6
45
4
理
A
+0.041
φ2 0 r 6+(0 . 0 2 8 )
6 N 9- 00( . 0 3 0 )
φ3 0
φ4 0
φ5 5 φ4 0
0
φ6 0 h 8-(0 . 0 4 6 )
汉
在a、b范围内
理 工
0.06
大
学
0.05
《 互
0.4 A
换
性 1、多个相同的被测要素。
与
测 2、其他说明性要求应标注在形位公差框格的下方。
量 技
3、同一要素有多项要求。
术
》 4、当多个被测要素有相同的形位公差要求时,可以从框格引出
的指引线上绘制多个指示箭头并分别与被测要素相连。
2、被测要素
形位公差国家标准图示

基准线 被测轴线必须位于距离为公差值 0.2 且在给定方向上平行于基准线的两平行 平面之间
0.2 A
A 平行度公差
被测轴线必须位于距离为公差值 0.1 且在给定方向上平行于基准轴线的两平 行平面之间
0.1 A
A
公差带是两对互相垂直的距离分别 为 t1 和 t2 且平行于基准线的两平行平面 之间的区域
ø0.08 A - B
A
B
基准轴线 同轴度公差
中心平面的对称度公差 公差带是距离为公差值 t 且相对基准
的中心平面对称配置的两平行平面之间的 区域
基准平面
被测中心平面必须位于距离为公差 值 0.08 且相对于基准中心平面A对称配 置的两平行平面之间
被测中心平面必须位于距离为公差
A
0.08 A
值 0.08 且相对于公共基准中心平面 A-B
与基准线成一给定角度的两平行 平面之间的区域
基准平面
t
A 基准线
被测轴线必须位于直径为公差 值ø0.1的圆柱面公差带内,该公差 带的轴线应与基准表面 A(基准平 面呈理论正确角度 60˚ 并平行于基 准平面 B。
面对面倾斜度公差 公差带是距离为公差值 t
且与基准面成一定给定角度的 两平行平面之间的区域
24±0.1 R25 22
ø
t ø
ø
t t
t øt
径向全跳动公差 公带差是半径为公差值 t 且与基准同
轴的两圆柱面之间的区域
基准轴线
端面全跳动公差
公差带是距离为公差值 t 且与基准 垂直的两平行平面之间的区域
基准轴线
被测要素绕公共基准线 A-B 作若干 次旋转,并在测量仪器与工件同时作轴向 的相对移动时,被测要素上各点间的示值 差均不得大于 0.1。测量仪器或工件必须 沿着基准轴线方向并相对于公共基准轴线 A-B 移动
形状公差和位置公差的详细解说共63页文档

形状公差和位置公差的详细解说
56、极端的法规,就是极端的不公。 ——西 塞罗 57、法律一旦成为人们的需要,人们 就不再 配享受 自由了 。—— 毕达哥 拉斯 58、法律规定的惩罚不是为了私人的 利益, 而是为 了公共 的利益 ;一部 分靠有 害的强 制,一 部分靠 榜样的 效力。 ——格 老秀斯 59、假如没有法律他们会更快乐的话 ,那么 法律作 为一件 无用之 物自己 就会消 灭。— —洛克
《形状和位置公差》PPT课件

6.5.3表面粗糙度的评定 1.基本术语 由于加工表面的不均匀性,在评定表面粗糙度时,需要规定取样长度和评定长度等技
术参数,以限制和减弱表面波纹度对表面粗糙度测量结果的影响。 1)轮廓滤波器 把轮廓分成长波和短波成分的滤波器。 2)λc滤波器 确定粗糙度与波纹度成分之间相交界限的滤波器。
3)取样长度(lr) 取样长度是用于判别被评定轮廓的不规则特征的X轴方向上的长度,即测量或评定表面
第6章 形状和位置公差
6.1 概 述 6.2 形状公差与轮廓度公差 6.3 位置误差与位置公差 6.4 概 述
6.1.1 形位公差的研究对象 形位公差的研究对象是零件的几何要素(简称为“要素”),就是构成零件 几何特征的点、线、面。 几何要素可按不同的角度分类如下 1.按存在的状态分为理想要素和实际要素 2.按结构特征分为中心要素和轮廓要素 3.按所处地位分为基准要素和被测要素 4.按功能关系分为单一要素和关联要素
6.3.3 跳动公差与公差带 跳动公差是关联实际要素绕基准轴线回转一周或连续回转时所允
许的最大跳动量。跳动公差分为圆跳动和全跳动。圆跳动是指被测要 素在某个测量截面内相对于基准轴线的变动量;全跳动是指整个被测 要素相对于基准轴线的变动量。
6.4形位公差的选用 形状和位置公差的设计选用对保证产品质量和降低制造成本具有十分重要的意义。 它对保证轴类零件的旋转精度;保证结合件的联接强度和密封性;保证齿轮传动 零件的承载均匀性等都有很重要的影响。 形状和位置公差的选用主要包括形位公差项目的选择;公差等级与公差值的选择; 公差原则的选择和基准要素的选择。
粗糙度时所规定的一段基准线长度 4)评定长度(ln) 评定长度是用于判别被评定轮廓的X轴方向上的长度。由于零件表面粗糙度不均匀,为
形状和位置公差课件
第三十三页,共84页。
影响形位公差带的有四个因素:形状、大小、方
向、位置。
公差带的形状:取决公差项目, 有两平行直线组
成的区域;两平行平面组成的区域; 两同心圆柱
面之间的区域等。
公差带的方向: 对于形状公差其放置方向应符合 最小条件; 对于位置公差其放置方向由被测要素 和基准的几何关系确定。
所示。尺寸虽合格却形不成间隙配合,原因是轴 存在着较大的形状误差。
图7-1 轴孔尺寸公差与轴的形状误差
第三页,共84页。
形状误差:轴线不直、平面不平、轴或孔的横截
面不圆等。
位置误差:不平行、不垂直、不同轴等。
由于零件形位误差的存在,将对机器的精度、结
合强度、密封性、工作平稳性、使用寿命等产生
不良影响。因此,对一些重要零件有必要给定形
向上的变动量的指标。
垂直度公差带定义和示例见表7-3。 (三)倾斜度:限制实际被测要素对于基准在给定
角度方向上变动量的指标。
第二十八页,共84页。
被测要素与基准的倾斜角度用理论正确角度表示。
二、定位公差和误差 定位公差:关联实际被测要素对具有确定位置的理 想要素的允许变动量。
理想要素的位置由基准和理论正确尺寸确定。
1. 规定:位置误差的评定应符合最小条件。 规定有两层意思: (1)基准要素理想形状的位置,应符合最小条件。 (2)理想被测要素的位置,应符合最小条件。 2. 平面度的测量 (1)将A平面放在高精度的平板上; (2)以平板为基准测量顶面的平行度。
第四十页,共84页。
平板可认为是具有理想 形状的基准要素,且与
形状和位置公差
第一页,共84页。
第一节形状公差和误差
一、概述
形状位置公差(20210201074706)

形状位置公差
零件在加工过程中,由于机床一夹具一刀具系统存在几何误差,以及加工中出现受力变形、热变形、振动和磨损等影响,使被加工零件的几何要素不可避免地产生误差。
这些误差包括尺寸偏差、形状误差(包括宏观几何误差、波度和表面粗糙度)及位置误差。
形状公差
形状公差是指单一实际要素的形状所允许的变动全量。
形状公差用形状公差带表达。
形状公差带包括公差带形状、方向、位置和大小等四要素。
形状公差项目有:直线度、平面度、圆度、圆柱度、线轮廓度、面轮廓度等6
项。
位置公差
位置公差是指关联实际要素的位置对基准所允许的变动全量。
定向公差
定向公差是指关联实际要素对基准在方向上允许的变动全量。
这类公差包括平行
度、垂直度、倾斜度3项。
定位公差
定位公差是关联实际要素对基准在位置上允许的变动全量。
这类公差包括同轴度、
对称度、位置度3项。
跳动公差
跳动公差是以特定的检测方式为依据而给定的公差项目。
跳动公差可分为圆跳动与全跳动。
零件的形位公差共14项,其中形状公差6个,位置公差8个,列于下表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
面对面倾斜度公差 如在公差值前加注 ø ,则 公差带是直径为公差值 t 的圆 柱面内的区域,该圆柱面的轴 线应与基准平面呈一给定的角 度并平行于另一基准平面
t
被测轴线必须位于直径为公差 值ø0.1的圆柱面公差带内,该公差 带的轴线应与基准表面 A(基准平 面呈理论正确角度 60˚ 并平行于基 准平面 B。
形 状 和 位形 置 公 差 公差 国 家 标 准图解 状和位置 国家标准
公差特征项目符号
公
差
特征项目 直线度
符号
有或无基准要求 无
线对线平行度公差 公差带是距离为公差值 t 且平行于 基准线、位于给定方向上的两平行平面 之间的区域
被测轴线必须位于距离为公差值 0.1 且在给定方向上平行于基准轴线的两平 行平面之间
0.01
线对线垂直度公差 公差带是距离为公差值 t 且垂直于基 准线的两平行平面之间的区域
t
B
被测轴线必须位于距离为公差值 0.06 且垂直于基准 A(基准轴线)的两 平行平面之间
0 . 06 A
如公差值前加注 ø,则公差带是直径 为公差值为 t 且垂直于基准面的圆柱面内 的区域 øt
被测轴线必须位于直径为公差值 ø 0.01 且垂直于基准面 A (基准平面) 的圆柱面内
被测线与基准线不在同一平 面内:公差带是距离为公差值t且 与基准成一给定角度的两平行平 面之间的区域。如被测线与基准 不在同一平面内,则被测线应投 影到包含基准轴线并平行于被测 轴线的平面上,公差带是相对于 投影到该平面的线而言
被测表面必须位于距离为公差 值 0.1且与基准线 A(基准轴线)成 理论正确角度 75˚ 的两平行平面之 间
t
基准平面
点的位置度公差 如公差值前加注 ø,公差带是直径为 公差值t的圆内的区域。圆公差带的中心 点的位置由相对于基准 A 和 B 的理论正 确尺寸确定
B 基准
线位置度公差 两个中心线的交点必须位于直径为 公差值 0.3 的圆内,该圆的圆心位于由 相对基准 A 和 B(基准直线)的理论正 确尺寸所确定的点的理想位置上
B
øt
ø 0.3 A B
公差带是距离为公差值 t 且以线的理想 位置为中心线对称配置的两平行直线之间 的区域。中心线的位置由相对于基准A的理 论正确尺寸确定,此位置度公差仅给定一 个方向
t 2 t t 2
每根刻线的中心线必须位于距离为公 差值 0.05 且由相对于基准A的理论正确尺 寸所确定的理想位置对称的诸两平行直线 之间
0.1
A A
基准平面
A
面对线垂直度公差
公差带是距离为公差值 t 且垂直于基准 线的两平行平面之间的区域
C
被测面必须位于距离为公差值 0.08 且 垂直于基准线 A (基准轴线)的两平行平 面之间
A
C
基准平面
位置 定位
位置度 同轴(同心)度 对称度 跳动 圆跳动 全跳动
公差带是两对互相垂直的距离分别 为 t1 和 t2 且平行于基准线的两平行平面 之间的区域 t2
B
8X ø 0.1 C A B
ø
ø
ø
30
同轴度公差
对称度公差
位置度公差
15
30
30
30
A
C
线对线倾斜度公差 被测线和基准线在同一平面 内:公差带是距离为公差值 t 且 与基准线成一给定角度的两平行 平面之间的区域 被测轴线必须位于距离为公差值 0.08 且与 A-B 公共基准线成一理论正 确角度的两平行平面之间 被测轴线投影到包含基准轴线的平面 上,它必须位于距离为公差值 0.08 并与 A-B 公共基准线成理论正确角度 60˚ 的两 平行平面之间
0.1
A
被测轴线必须位于距离分别为公差 值 0.2 和 0.1,在给定的互相垂直方向上 且平行于基准轴线的两组平行平面之间
0.2
A
如在公差值前加注 ø,公差带是直 径为公差值 t 且平行于基准线的圆柱面 内的区域
线对面平行公差 公差带是距离为公差值 t 且平行于基 准平面的平行平面之间的区域 t
被测轴线必须位于距离为公差值 0.01 且平行于基准表面 B (基准平面) 的两平行平面之间
A
被测轴线必须位于直径为公差值 0.03 且平行于基准轴线的圆柱面内
A
ø 0.03 0.2
A A
被测表面必须位于距离为公差值 0.01 且平行于基准线 C (基准轴线)的 两平行平面之间
0.01
线对面垂直度公差 在给定方向上,公差带是距离为公 差值 t 且垂直于基准面的两平行平面之 t 间的区域
在给定方向上被测轴线必须位于 距离为公差值 0.1 且垂直于基准表面 A 的两平行平面之间
测量圆锥面 测量圆柱面
A
60˚
0.1
C
ø
t
基准平面
A
t
75˚
A
跳动通常是围绕轴线旋转一整周, 也可对部分圆周进行限制
B
A
C
倾斜度公差
基准线
圆跳动公差
径向全跳动公差 公带差是半径为公差值 t 且与基准同 轴的两圆柱面之间的区域
基准轴线
端面全跳动公差 公差带是距离为公差值 t 且与基准 垂直的两平行平面之间的区域 在给定平面内,公差带是距离为 公差值t的两平行直线之间的区域 被测表面的素线必须位于平行于图样 所示投影面而且距离为公差值 0.1 的两平 行直线内
20
30
30
30
30
A
基准线
A
t 2
A 基准
100
68
ø ø 0.01 A
0.05 A
20 8 8
A
A 基准
轴线的同轴度公差 公差带是直径为公差值 øt 的圆柱面 内的区域,该圆柱面的轴线与基准轴线 同轴
大圆柱面的轴线必须位于直径为公 差值 ø0.08 且与公共基准线 A-B(公共 基准轴线)同轴的圆柱面内
ø0.1 A
公差带是距离为公差值 t 且与基准面成一定给定角度的 两平行平面之间的区域
0.08 60˚
A- B 60˚
B
60˚
t
圆跳动公差是被测要素某一固定参 考点围绕基准轴线旋转一周时(零件和 测量仪器间无轴向位移)允许的最大变 动量 t,圆跳动公差适用于每一个不同的 测量位置 注:圆跳动可能包括圆度、同轴 度、垂直度或平面度误差,这些误差的 总值不能超过给定的圆跳动公差 径向圆跳动公差 公差带是在垂直于基准轴线的任一测 量平面内、半径差为公差值 t 且圆心在基 准轴线上的两同心圆之间的区域
0.1
公带差是在与基准同轴的任一测 量圆锥面上距离为t的两圆之间的区域 除另有规定,其测量方向应与被 测面垂直
基准轴线
t
测量圆锥面
被侧面绕基准线 A(基准轴线)旋 转一周时,在给定角度为 60˚ 的任一测 量圆锥面上跳动量均不得大于 0.1
0.1
A
基准轴线
B
0.1 A
A
0.08 A
40˚
测量平面
C
被测曲面绕基准线 C(基准轴线)旋 转一周时,在任一测量圆锥面上的跳动量 均不得大于 0.1
Sø
Y
被测球的球心必须位于直径为公差 值 0.3 的球内.该球的球心位于由相对基 准 A、B、C 的理论正确尺寸所确定的 理想位置上
公差带是两对互相垂直的 距离为 t1 和 t2 且以轴线的理想位置为中心对称配置的两 平行平面之间的区域。轴线的理想位置是由相对于三基面体系的理论正确尺寸确定的, 此位置度公差相对于基准给定互相垂直的两个方向
0.1 0 0.3
0.1
t
24±0.1
公差带是在同一正截面上, 半径差为公差值t的两同心圆之间 的区域
被测圆柱面任一正截面的圆周 必须位于半径差为公差值 0.03 的两 同心圆之间
公差带是半径差为公差值 t 的两同 轴圆柱面之间的区域
被测圆柱面必须位于半径为公差值 0.1 的两同轴圆柱面之间
0.08 A
D
A A
基准线 基准平面 基准平面
D
0.1 基准平面
A
平行度公差
基准线
A
垂直度公差
基准平面
A
点的同心度公差 公差带是直径为公差值 ø t 且与基准 圆心同心的圆内的区域 øt
外圆的圆心必须位于直径为公差 值 ø 0.01且与基准圆心同心的圆内
30
中心平面的对称度公差 公差带是距离为公差值 t 且相对基准 的中心平面对称配置的两平行平面之间的 区域
ø0.08 A - B
被测中心平面必须位于距离为公差 值 0.08 且相对于基准中心平面A对称配 置的两平行平面之间 被测中心平面必须位于距离为公差 值 0.08 且相对于公共基准中心平面 A-B 对称配置的两平行平面之间
如公差值前加注 Sø,公差带是直径 为公差值t的球内的区域。球公差带的中心 点的位置由相对于基准 A、B 和 C 的理论 正确尺寸确定
A 基准平面
B
8X ø 0.05 C 8X 0.2
平面或中心平面的位置度公差
A B
C
A B C
公差带是距离为公差值 t 且以面的理 想位置为中心对称配置的两平行平面之间 的区域。面的理想位置是由相对于三基面 体系的理论正确尺寸确定的
被测表面必须位于距离为公差值 0.05,由以相对于基准线 B(基准轴 线)和基准表面 A(基准平面)的理 论正确尺寸所确定的理想位置对称配 置的两平行平面之间
基准线
0.2 A
t1
0.1
A
面对面平行度公差 公差带是距离为公差值 t 且平行于基 准面的两平行平面之间的区域
t
被测表面必须位于距离为公差值 0.01 且平行于基准表面 D (基准平面) 的两平行平面之间