基于机器视觉的精准施药平台喷药机构设计解析
果园自动喷药控制系统现状与研究分析

果园自动喷药控制系统现状与研究分析作者:丁锐来源:《科学与财富》2017年第33期摘要:我国是粮油、果菜种植大国,然而病虫害的发生会造成我们极大的损失,而目前有效方式之一就是农药喷洒,本文通过分析果园农药喷洒技术、信息检测系统及喷药机械装置的国内外研究现状,然后提出结合我国国情的方案和技术路线。
关键词:喷药系统;红外扫描;精准定位;非连续;控制器虽然农药的喷洒减轻了果品的病虫害灾害,然而,目前我国存在问题是农药喷洒的机械化水平不高,精准率低,药液装置简陋,利用率仅仅为10%-30%,这与国际IE标准相差甚远,仅是国际20世纪80年代初的农药利用率标准,这种农药喷洒模式很大程度上造成了人力的浪费和果品的减产。
因此,提高农药的利用率和精准率和机械化水平是亟待解决的问题。
1.国内外研究现状目前,美国、丹麦等国家的农药喷施手段较为先进,国内外果园喷药技术的发展趋势将日益改善,实现自动化程度高、精准度高、效率高的喷药方案。
1.1果园喷药技术研究现状20世纪80年代末,果园风幕式喷药技术开始在欧洲地区兴起,风幕式喷药是通过鼓风。
90年代初,该喷药技术已经被广泛应用于中外果园中。
到了21世纪,喷药技术的研究重点转变为如何实现低量和变量喷药,喷药技术也日益增多。
国内外主要的喷药技术如下:1.1.1 红外扫描果园喷药技术的研究现状20世纪690年代初,红外技术因其没有破坏性,可实现无损探测,成本较低,探测结果精准,用时较短,受到了企业和各专家学者的青睐,并被迅速应用于工业生产、农作物栽培、医疗器械上。
美国应用红外扫描技术较早。
1981年,美国通过研制出红外光电式喷雾机,该喷雾剂改变了传统连续喷雾的缺陷,实现了间歇式不连续喷雾,并且减少了农药的使用,将农药利用率提高了24%-51%。
1990年,红外扫描喷药技术经过改进,被应用于除草喷药。
日本在1994年采用光电探测技术,研制出一款用于果园自动喷雾的自走式喷雾机,该机器识别果园中果树位置进行喷药操作。
《果园机器人》

除了苹果和柑橘,果园机器人还可 以应用于其他水果的种植,如葡萄 、草莓等。
02
果园机器人技术解析
机器人技术
机械设计
果园机器人需要具备适应 果园环境的机械结构,包 括行走、攀爬、抓握等能 力。
运动控制
机器人需要精确控制其运 动,包括速度、方向、高 度等,以确保能够准确到 达目标位置。
材料选择
植物等,以便进行精确操作。
传感器技术
距离传感器
距离传感器可以帮助机器人感知周围环境中的物 体距离,以便进行避障、定位等操作。
重量传感器
重量传感器可以检测水果的重量,帮助机器人判 断水果是否成熟,提高采摘效率。
颜色传感器
颜色传感器可以帮助机器人识别水果的颜色,进 行更加精准的采摘操作。
通信技术
Wi-Fi通信
社会影响与未来展望
01
劳动力解放
02
提高农业产值
果园机器人的广泛应用将解放大量劳 动力,使他们能够从事更高级的工作 。
通过果园机器人的应用,可以提高农 业生产效率,增加农业产值。
03
未来农业展望
果园机器人的发展将推动农业技术的 进步,为未来的农业发展带来更多的 可能性。同时,果园机器人的普及也 将改变农村劳动力的结构和生活方式 。
法律法规限制
在一些国家和地区,果园机器人的应用可能受到法律法规的 限制和监管,需要遵守相关法律法规和标准。
解决方案与建议
加强技术研发
优化成本结构
通过加强技术研发,提高机器人的智能化 程度和适应能力,以更好地应对果园环境 的挑战。
提高用户认知度
通过优化设计和生产工艺,降低制造成本 和维护成本,提高机器人的市场竞争力。
效益分析
基于机器视觉的智能农田灌溉控制系统设计与实现
基于机器视觉的智能农田灌溉控制系统设计与实现一、引言随着科技的快速发展,农业领域的创新也逐渐成为现实。
基于机器视觉的智能农田灌溉控制系统是一种新兴的技术,它利用机器视觉技术,实现了对农田的智能灌溉控制。
本文旨在介绍该系统的设计与实现,以及其在农田灌溉方面的应用与前景。
二、设计原理基于机器视觉的智能农田灌溉控制系统的设计原理是通过采集、处理、分析和利用图像数据来实现对农田的智能控制。
系统利用高分辨率摄像头捕捉农田的图像,并将图像数据传输到后台系统进行处理和分析。
通过对图像中的植物、土壤、天气等要素进行分析,系统能够实时监测植物的生长情况、土壤的湿度以及天气的变化,从而根据实际情况智能地进行灌溉控制。
三、系统组成基于机器视觉的智能农田灌溉控制系统主要由以下组成部分构成:1. 摄像头:系统采用高分辨率摄像头来捕捉农田的图像数据,摄像头安装在适当的高度和角度上,以获取清晰、准确的图像。
2. 图像处理与分析算法:系统利用图像处理与分析算法来提取图像中的植物、土壤和天气等要素,并进行相应的信息处理和分析。
3. 控制器:系统的控制器负责接收图像处理与分析后的数据,并根据设定的参数来控制灌溉设备的开关、水流量和灌溉时间等。
4. 灌溉设备:系统配备相应的灌溉设备,包括水泵、喷头或滴灌器等,用于实现对农田的灌溉。
5. 后台系统:后台系统负责接收、处理和存储摄像头传输的图像数据,并对图像进行分析和处理,根据结果生成相应的控制命令发送给控制器。
四、实现步骤基于机器视觉的智能农田灌溉控制系统的实现步骤如下:1. 系统安装与配置:首先,需要安装和配置摄像头、控制器和灌溉设备。
摄像头应安装在适当位置,确保其能够全面捕捉农田的图像。
控制器和灌溉设备则需要根据实际情况进行布置和连接。
2. 图像传输与处理:摄像头捕捉到的图像数据需要通过网络传输到后台系统进行处理。
可使用无线网络或有线网络进行传输。
后台系统负责接收图像数据,并利用图像处理算法提取所需的信息。
浅析六旋翼农药喷洒无人机的结构设计

浅析六旋翼农药喷洒无人机的结构设计作者:张恩奋来源:《中国科技博览》2018年第34期[摘要]针对农药喷洒问题,本文设计了一种六旋翼农药喷洒无人机,结合六旋翼农药喷洒无人机构造与原理,对无人机的结构设计问题展开了探讨,从而为关注这一话题的人们提供参考。
[关键词]六旋翼无人机;农药喷洒;结构设计中图分类号:U571 文献标识码:A 文章编号:1009-914X(2018)34-0274-01引言:在传统农业生产中,农药喷洒主要采用地面人工喷洒方式,不仅造成农药利用率较低,也容易给人员健康带来威胁。
而采用无人机进行农药喷洒,可以实现高空定点喷洒作业,满足现代农业发展需求。
在这类无人机中,六旋翼无人机拥有飞行灵活、成本低等优势。
因此,还应加强六旋翼农药喷洒无人机的结构设计研究,从而更好的进行农用无人机的推广。
1 六旋翼农药喷洒无人机构造与原理从构造上来看,六旋翼农药喷洒无人机由机体部分、控制部分与动力部分构成,各部分的功能不同,彼此间存在相互作用。
机体部分为机身骨架,可以实现对其他部分的固定和机械连接。
动力部分能够提供电力,包含电动机、电磁等结构,同时也能执行控制命令。
控制部分能够实现对无人机作业的控制,能够为运动部分提供精密的控制指令[1]。
六旋翼无人机包含六个位于同一平面的螺旋桨,各自利用长度不等的轴连接在机架固定板位置,以保证机架上半部分重心与中心重合,确保机身能够承受较大的负载。
所以从整体布局上来看,无人机为圆形对称结构,利用6个对称电机给旋翼提供动力。
在控制系统的集中控制下,各旋翼间的转速和旋转方向能够得到协调,从而共同为机身提供向上升力,并对机身的运动方向进行控制,达到平衡机身的目的。
在飞行过程中,如图1所示,三个电机顺时针旋转,另外三个逆时针旋转,以平衡旋翼给机身的反扭矩。
使电机同时增速旋转,可以使飞机向上运动。
在1、2转速减小,4、5转速增大,3、6转速不变情况下,能使飞行器向前方运动。
林业工程中的智能对靶喷雾机软件系统设计

I T 技术科技创新导报 Science and Technology Innovation Herald701 森林病虫害防治工作的情况目前我国国内的森林病虫害情况依然非常严峻,传统的农药喷洒技术已经远远不能满足大面积的农药施药工作,在农药的使用上仍然局限在手工喷洒农药的操作上,特别是在偏远贫困地区,由于经济不发达,导致先进设备的应用和推广还较为滞后。
针对这一问题可以通过科学技术方法来弥补传统农药施药方面的欠缺,以提高农药使用效率,达到保护生态环境的目的。
为了更好地提高森林病虫害防治效率,减少农药对人体的伤害,因此设计了智能对靶喷雾机软件系统,使其能很好地在智能林业工程领域,为科技在林业领域中的应用提供强有力的科学支持。
2 智能对靶喷雾机软件系统框架设计在整个软件系统设计中,需要达到的目的是减少软件系统的开发时间,提高软件的可靠性,并且便于后期整个系统的升级和维护,因此在设计和开发过程中采用软件复用技术方式进行集成开发。
通过功能的划分进行模块化设计与实现,在软件系统设计中,先定义好需要预留的接口,接口之间可以互相通信完成数据的交换与传输,这样可以做到软件系统构件化设计的要求。
在系统设计过程中定义了三个主要构件,即数据获取构件、数据处理构件和控制执行构件,构件与构件之间通过定义的标准接口。
图1为整个系统的软件构件框架,其特点是每个模块和构件之间功能相互独立,模块和构件之间的通讯和信息交互不受系统外界的影响,其表现为低耦合和高内聚的特性。
数据获取构件的功能是针对施药目标的树木靶标等信息通过二进制信息采集的方式输入电脑中保存,在信息数据采集过程中采用不同的方式,使得后期输出的内容也不同。
在信息采集选择视野上一般采用单目电荷耦合图像采集器(C C D)作为信息输入端。
如果要想得到更多信息数据,单目数据采集技术已经不能达到信息获取的要求,在此需要将双目视觉技术应用在系统①基金项目:江苏省智能传感器网络工程技术研究开发中心基金资助项目,项目编号:ZK12-01-10。
精准施药技术现状分析

精准施药技术现状分析翟长远;朱瑞祥;张佐经;马亮亮;张启遇【摘要】在分析精准施药技术重要性的基础上,从信息获取方式、喷雾技术和控制系统3个环节对国内外精准施药技术进行了分析.首先,详细阐述了基于实时传感器和基于地理信息技术的信息获取方式;其次,分析了风送液力式喷雾技术、静电式喷雾技术、超低量和低量喷雾技术和仿形喷雾技术;最后对控制系统进行了阐述和分析,旨在为我国精准施药技术的发展提供借鉴.【期刊名称】《农机化研究》【年(卷),期】2010(032)005【总页数】4页(P9-12)【关键词】精准农业;变量施药;智能控制【作者】翟长远;朱瑞祥;张佐经;马亮亮;张启遇【作者单位】西北农林科技大学,机电学院,陕西,杨凌,712100;西北农林科技大学,机电学院,陕西,杨凌,712100;西北农林科技大学,机电学院,陕西,杨凌,712100;西北农林科技大学,机电学院,陕西,杨凌,712100;西北农林科技大学,机电学院,陕西,杨凌,712100【正文语种】中文【中图分类】S490 引言化学防除是重要的农业生产技术之一,在农业生产中发挥着重要的作用[1]。
据联合国粮农组织统计,由于使用化学农药,全世界每年挽回20%~25%的农产品,农药的投入可收回4~5倍价值的农产品。
我国每年因各种病虫害损失粮食约4 000万t,约占全国粮食总产量的8.8%。
而在施药过程中,少施达不到杀虫、除草的效果,多施会造成环境污染。
为了实现抗灾、减损、增效,减少对环境的污染,关键所在是提高施药技术水平,也就是解决制约我国化学防除推广应用中的“瓶颈”问题[2-3]。
精准施药技术的核心是获取农田小区域内病虫草害的差异性,采取高效喷雾技术和变量施药技术,按需施药[4-5]。
目前,世界各国对精准变量施药技术的发展潜力以及应用前景有着广泛共识,并将其作为发展农业高新技术应用的重要内容[6-8]。
西欧、美国和日本等发达国家在施药技术和施药机械上都有了较大的突破,基本做到了精喷量、少污染和高功效。
机器视觉技术在药品质量检测中的应用

机器视觉技术在药品质量检测中的应用一、背景和意义近年来,随着社会和经济的快速发展,药品产业得到迅猛发展。
随之而来的是越来越多的药品及其复杂的生产过程,更需要高效,快速,准确的质量控制。
传统的药品质量检测主要依靠人工,但是人工检测方法存在着测量误差大,效率低下,且对操作人员的要求高等弊端。
机器视觉技术正好弥补了这个“痛点”,如何将其应用于药品质量检测中,成为了一个有待解决的问题。
二、机器视觉技术在药品表面缺陷检测中的应用药品的表面质量问题,可能会对药品的安全性和质量产生很大的影响。
目前药品的表面缺陷检测一般采用人工进行,但人工检测不仅效率低下,而且在检测质量方面也存在很大的缺陷。
机器视觉技术的引用可以有效解决该问题,机器视觉技术可以很快地对药品进行较全面的检测,并对不合适的药品进行自动筛选。
三、机器视觉技术在药丸检测中的应用药丸是一种应用十分广泛的药品形式,其数量巨大,质量安全的检测是十分必要的。
由于传统的检测技术人工费力,效率低下,利用机器视觉技术进行药丸检测可以极大地提高检测效率,准确性和自动化程度。
机器视觉技术可以很快地检测出药丸的各种属性,包括大小、形状、颜色等,精准筛选不符合标准的药丸。
四、机器视觉技术在药品缺损检测中的应用药品内部缺损是影响药品质量的一个重要因素,目前的解决办法主要是借助放射技术等高级测试手段。
而机器视觉技术可以有效解决该问题,通过对药品的内部进行非侵入式的扫描和检测,可以快速检测出药品的内部缺损,并自动分选。
五、机器视觉技术应用的诸多优势相比传统的药品质量检测方法,引用机器视觉技术具有明显的优势:一是检测速度快;二是自动化程度高,可以免去人工检测的繁琐步骤;三是检测的准确性更高,相比人工检测的误差大大降低。
六、结论伴随着社会经济的发展,药品产业的快速壮大,药品质量的检测变得越来越重要。
引用机器视觉技术可以有效解决传统药品质量检测的低效率,低准确性等缺点。
因此,机器视觉技术在药品质量检测中的应用有着广阔的前景,未来也将会有更多的应用案例涌现。
果园喷药机器人的单目视觉导航定位

万现全,王虎奇,丛佩超,等.果园喷药机器人的单目视觉导航定位算法研究[J].江苏农业科学,2023,51(2):202-209.doi:10.15889/j.issn.1002-1302.2023.02.030果园喷药机器人的单目视觉导航定位算法研究万现全,王虎奇,丛佩超,肖宜轩,赵曰炜,陈熙来,刘俊杰(广西科技大学机械与汽车工程学院,广西柳州545006) 摘要:自主定位是果园喷药机器人视觉导航的重要环节。
针对果园喷药机器人视觉导航过程中定位精度低的问题,本研究提出一种基于ORB-SLAM2的单目视觉定位算法,通过优化图像ORB特征的提取策略,并使用灰度质心法及图像金字塔算法实现其尺度、旋转不变性,提高视觉里程计中特征点的提取、匹配精度,利用ORB-SLAM2中局部建图、回环检测及重定位模块优化位姿,实现果园喷药机器人精确定位。
为验证本方法的有效性,利用TUM数据集对本研究算法进行仿真分析,将绝对轨迹误差平均值作为评价指标。
结果表明,相较ORB-SLAM2算法,其平均误差降低15.06%,均方根误差平均下降16.44%。
以此为基础,在模拟柑橘园环境进行实物验证,试验结果表明,本研究算法在直线、回环运动中均可实现有效定位,特征匹配数量平均提升18.18%,初始化时间在光照明、暗条件下分别为4.993、8.986s,关键帧数量在2种条件下分别为67.2、64.2帧,综合性能优于原算法。
因此,本研究优化后的视觉定位方法可为果园农药喷洒机器人实际工况下的导航定位提供理论和实践参考。
关键词:果园喷药机器人;视觉自主定位;ORB-SLAM2;特征处理;尺度及旋转不变性 中图分类号:TP242.6+2 文献标志码:A 文章编号:1002-1302(2023)02-0202-08收稿日期:2022-01-26基金项目:中央引导地方科技发展专项资金(编号:桂科ZY19183003);广西重点研发计划(编号:桂科AB20058001);广西科技基地和人才专项(编号:桂科AD19110021)作者简介:万现全(1995—),男,山东菏泽人,硕士研究生,主要从事视觉SLAM的研究。
东北农大创新训练项目- 基于苗带追踪与变量对靶喷施的多垄 智能除草机器人的研制

项目来源学生自拟项目()、导师提供项目(√)(在相应位置打√)一、项目研究背景(500字以内)伴随着人口增加、土地沙漠化等环境问题的日益严重,人均可耕地面积不断减少。
据农业部最新数据表明,目前耕地退化面积占耕地总面积的40%以上,因而提高单位面积产出是保障粮食安全的重要环节。
在传统农业中,农田杂草与作物争营养阻碍作物生长发育并造成不可估量的经济损失。
据估计,全球15亿2hm耕地每年仅杂草危害就造成约763亿美元的损失[1]。
我国农田杂草危害面积大约为4000万2hm,严重危害面hm,以麦田杂草为例,草害面积达1000万2积约260万2hm,产量损失高达40亿kg[1]。
据国内外有关专家统计,草害所造成的损失为农产品总产值的30%左右由此可见喷洒农药的必要性。
然而,目前我国农业生产中以人工喷洒农药为主,但人工喷洒农药除草剂对人体机理损害较为严重。
生产性农药中毒病例中有65% ~85% 是直接或间接通过皮肤吸收所致。
[2]。
使用新型的施药器械与施药技术有助于降低施药人员体表的农药沉积残留[3],由此可见,在农业生产中,为保障生产人员健康,采用机器喷洒农药的急迫性与必要性。
二、项目立论依据201.项目研究目的和意义(500字以内)根据有关学者进行的除草剂喷洒对比试验结果表明:假定均匀喷洒除草剂的使用量为100﹪,通过开/关喷嘴间断喷洒除草剂的变量喷洒方法能节省约10﹪的除草剂,根据杂草密度喷洒不同剂量的除草剂的变量喷洒方法能节省约45﹪的除草剂。
为此本研究小组研制了一种基于苗带追踪与变量对靶喷施的多垄智能除草机器人,该机器人为多功能耦合机器人,具有靶向追踪式除草、田间自主行走、田间环境监测等功能。
本研究小组计划通过采用新型植保手段,在到达除草剂除草阀值后尽可能减少溢出值,提高喷施作业的质量与效率以提高土地单位面积产量、减少由杂草带来的损失;通过全自动的智能化喷洒除草剂方式,缓解人力资源的短缺,保障农业生产人员的身体健康。
农药精准使用
(2) 树木目标图像采集
图像获取也就是图像的数字化过程,即将图像采集到计算 机中的过程,主要涉及成像及模数转换技术。一幅图像在用 计算机进行处理前必须先转化为数字形式,图像转化为数字 形式的方法是将物理图像经过采样划分为称作图像像素的小
区域,即像素。最常见的划分方案是方形采样网格,图像被
分割成由相邻图像组成的许多水平线。
统总体示意图,实时图采集系统通过CCD和图像采集卡实时 采集目标树木图像,通过计算机图像统提取树木目标特征, 并形成和发送喷雾控制策略,经农药喷雾可变量控制控制喷 头实现对靶喷雾。
3.3.2 树形识别系统
树形是由树冠和树干组成,树冠由主枝、侧枝、叶幕及一 部分主干组成。不同的树种各有其独特的树形,这主要由树 种的遗传性决定,但也受外界环境因子的影响,如园林管理、 自然界的风、光等多种因素的影响。在农药精确对靶喷雾中,
该系统能在3.7m×0.43m的范围内分辨出作物、杂草和土
壤,并在0.37s内做出喷雾决策。这样,喷雾机就能以 4.2km/h的速度行进。其分辨土壤的准确率为100%、分辨杂 草的准确率为75%、分辨作物的准确率为47.8%。 智能喷雾机(smart sprayer):美国伊利诺依大学农业与 生物工程系针对杂草防治,研究开发智能喷雾机。
案设计的农药精确对靶喷雾系统可应用于杂草防治,
城市和公路行道树、防护林、风景园林、果园果树、
设施农业和航空病虫害防治工作。
2.1.4 农药喷雾目标图像采集
(1) 绿色植物目标反射光谱特性
任何目标都有辐射、反射或吸收外来紫外线、可见光、红外线
和微波等电磁波的性质,少数地物目标还具有透射电磁波的特胜。
施药器械,实现农林病虫草害防治的农药使用技术的智能化、精确化和自动
打药无人机设计原理和设计方案
打药无人机设计原理和设计方案
打药无人机是一种用于农田农作物防治病虫害的无人机设备。
下面是一些打药无人机设计原理和设计方案的要点:
1. 稳定性和机动性:打药无人机需要具备稳定的飞行特性,以便精确投放农药。
同时,它应该具有较高的机动性能,能够适应不同的作业环境和航线要求。
2. 药液喷雾系统:打药无人机需要配备高效的药液喷雾系统,确保药液均匀喷雾到作物上。
这包括喷头设计、药液泵、流量控制系统等。
3. 智能化控制系统:打药无人机的控制系统应该具备智能化能力,能够根据农田的实际情况自动调整喷洒策略和航线规划。
这通常需要搭载传感器、GPS、图像处理等技术。
4. 能源系统:无人机需要配备高效可靠的能源系统,例如电池或燃油发动机,并具备较长的续航能力,以满足连续作业的需求。
5. 防护措施:为了保护周围环境和人员安全,设计中应考虑防护措施,如撞击保护结构、紧急停机装置等。
设计方案常常由无人机结构设计、飞行控制系统设计、喷洒系统设计、动力系统设计等部分组成。
需要根据具体的应用需求和环境条件进行综合考虑和设计。
基于立体视觉的炸药混装车自动装药系统
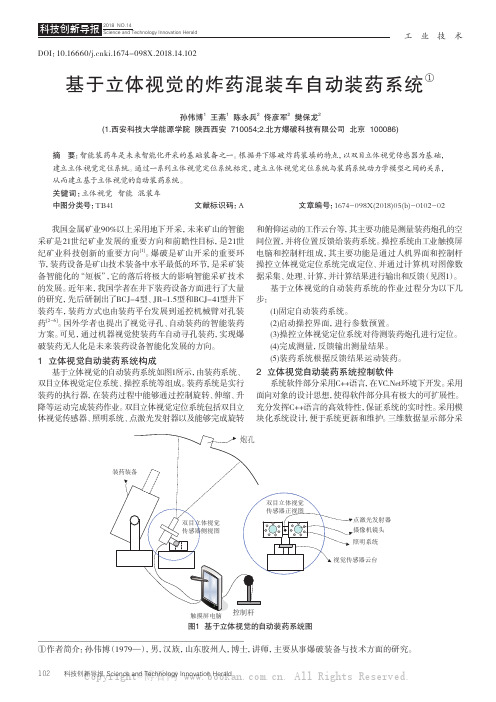
工业技术科技创新导报 Science and Technology Innovation Herald102DOI:10.16660/ki.1674-098X.2018.14.102基于立体视觉的炸药混装车自动装药系统①孙伟博1 王燕1 陈永兵2 佟彦军2 樊保龙2(1.西安科技大学能源学院 陕西西安 710054;2.北方爆破科技有限公司 北京 100086)摘 要:智能装药车是未来智能化开采的基础装备之一。
根据井下爆破炸药装填的特点,以双目立体视觉传感器为基础,建立立体视觉定位系统。
通过一系列立体视觉定位系统标定,建立立体视觉定位系统与装药系统动力学模型之间的关系,从而建立基于立体视觉的自动装药系统。
关键词:立体视觉 智能 混装车中图分类号:TB41 文献标识码:A 文章编号:1674-098X(2018)05(b)-0102-02①作者简介:孙伟博(1979—),男,汉族,山东胶州人,博士,讲师,主要从事爆破装备与技术方面的研究。
我国金属矿业90%以上采用地下开采,未来矿山的智能采矿是21世纪矿业发展的重要方向和前瞻性目标,是21世纪矿业科技创新的重要方向[1]。
爆破是矿山开采的重要环节,装药设备是矿山技术装备中水平最低的环节,是采矿装备智能化的“短板”,它的落后将极大的影响智能采矿技术的发展。
近年来,我国学者在井下装药设备方面进行了大量的研究,先后研制出了BCJ-4型、JR-1.5型和BCJ-41型井下装药车,装药方式也由装药平台发展到遥控机械臂对孔装药[2-6]。
国外学者也提出了视觉寻孔、自动装药的智能装药方案。
可见,通过机器视觉使装药车自动寻孔装药,实现爆破装药无人化是未来装药设备智能化发展的方向。
1 立体视觉自动装药系统构成基于立体视觉的自动装药系统如图1所示,由装药系统、双目立体视觉定位系统、操控系统等组成。
装药系统是实行装药的执行器,在装药过程中能够通过控制旋转、伸缩、升降等运动完成装药作业。
农业机械喷雾系统设计实现精准施药控制

农业机械喷雾系统设计实现精准施药控制在现代农业生产中,喷雾系统是实现精准施药控制的重要工具之一。
通过喷雾系统,可以将农药均匀喷洒到农田作物上,提高农作物的生长质量和产量。
本文将介绍农业机械喷雾系统的设计原理和实现精准施药控制的方法。
一、农业机械喷雾系统设计原理农业机械喷雾系统设计的核心原理是实现农药的均匀喷洒。
喷雾系统由喷雾器、泵站、控制器和喷洒管路组成。
农药通过泵站被输送到喷雾器,在控制器的指令下,喷雾器将农药均匀喷洒到作物上。
设计喷雾系统时,需要考虑以下几个方面:1. 喷雾器的选择:喷雾器的选择应根据农作物的种植情况和农药的性质来确定。
不同的农作物和农药需要不同类型、不同喷雾模式的喷雾器。
2. 泵站的性能:泵站是喷雾系统的核心部件,其性能会直接影响到农药的输送和喷洒效果。
泵站应具备较大的输送流量和稳定的压力输出。
3. 控制器的功能:控制器是喷雾系统的大脑,通过控制器可以实现对喷雾量、喷洒角度等参数的调节和控制。
控制器应具备精准的控制能力,能够根据实际情况进行灵活调整。
4. 喷洒管路的布置:喷洒管路的布置应合理,能够保证农药的均匀喷洒。
同时,喷洒管路应具备良好的耐腐蚀性和耐压性。
二、实现精准施药控制的方法1. 传感器技术:利用传感器可以实时监测农田的环境参数,如温度、湿度、风速等。
通过传感器采集到的数据,可以调节喷雾系统的喷洒量和喷洒角度,以适应不同环境条件下的农药施用需求。
2. GPS导航技术:结合GPS导航技术,可以实现对农田作物的精确定位,进而精确喷洒农药。
通过预先设定作物的生长范围和形状,喷雾控制器可以根据GPS导航的信息进行喷洒路径规划。
3. 机器视觉技术:利用机器视觉技术可以对农田作物进行图像识别和分类。
通过对作物的识别和分类,可以根据需要进行不同类型、不同剂量的农药喷洒,从而实现精准施药。
4. 数据分析与智能控制:通过对农田的监测数据进行分析,可以获取作物的生长状态和病虫害情况。
药品自动分拣系统的模块化设计

药品自动分拣系统的模块化设计药品自动分拣系统的模块化设计是指将整个系统划分为若干个具有特定功能的模块,各个模块之间可以独立运作,也可以协同工作,以实现不同的分拣需求。
模块化设计具有以下几个方面的优点:模块化设计便于系统的扩展和升级。
当需要增加新的分拣功能时,只需要添加相应的模块,而不需要对整个系统进行改动。
这使得系统能够适应不同用户的需求,并方便企业根据业务发展进行调整和优化。
模块化设计可以提高系统的可靠性。
每个模块都是独立的个体,一旦某个模块出现故障,可以迅速进行更换,而不会影响到整个系统的运行。
这有助于减少系统停机时间,提高分拣效率。
模块化设计有助于降低成本。
通过批量采购和标准化生产,可以降低单个模块的成本。
同时,模块化设计也有利于减少维护和培训成本,缩短系统部署时间,提高系统的性价比。
药品自动分拣系统的自动化程度对分拣效率和分拣质量有着重要影响。
随着技术的发展,越来越多的自动化技术被应用到系统中,如机器学习、人工智能等。
这些技术的应用可以帮助系统实现更加精准的识别、分类和筛选,提高分拣效率和质量。
同时,自动化技术的应用还可以减少人工干预,降低操作难度,提高系统的可靠性。
机器人:在药品自动分拣系统中,机器人可以承担运输、搬运、分类等任务。
通过机器人的应用,可以大幅提高分拣效率和质量,同时也可以降低人工成本和错误率。
算法:算法是实现药品自动分拣的核心技术,包括图像识别、自然语言处理、机器学习等。
通过算法的应用,可以实现对药品的精准识别、分类和筛选,提高分拣效率和准确率。
控制:药品自动分拣系统的控制部分负责协调各个模块的工作,确保系统的稳定运行。
同时,控制部分还可以实现对系统的监控、故障诊断等功能,提高系统的可靠性和安全性。
药品自动分拣系统的模块化设计可以提高系统的扩展性、可靠性和成本效益。
通过将系统划分为不同的模块,可以方便地添加或更换特定功能的模块,以满足不同用户的需求。
自动化技术的应用可以提高分拣效率和质量,降低人工成本和错误率。
基于机器视觉的成行作物精量喷洒系统研究
s ry d a c r tl n C i a y t m fp e iin b n p a i g b s d o c n so a e eo e o s le t ep o lm,w ih p a e c ua eyi h n ,a s se o r s a d s ry n a e n ma h e v i n W d v lp d t ov rb e c o i i s h hc
现代农业的发展随着信息化技术和计算机技术的稳 步提升已经出现了新的特点, 逐步走向智能化、 精准化和 机器人化…。由于机器视觉技术的突出优点 , 从一开始
应用在农业上就表现 出这一技术强大 的活力, 并逐渐成 为现代农业 中应用的热点。在传统 的植保领域 , 特别是 喷洒农药这方面 , 近些年来的农药残 留和地下水 污染 以 及农药带来的危害已被人们所关注 , 当前发达国家和一 些发展中国家正采取有效措施减少农药的使用或寻找替 代品甚至不使用农药。绿色食品的兴起和加入世界贸易
维普资讯
江西农 业学报
ቤተ መጻሕፍቲ ባይዱ
20 ,9 2 :3~6 071 ()6 5
A t giutreJa gi caA rc ua in x l
基 于机器 视 觉 的成 行 作物 精 量 喷洒 系统研 究
饶洪辉 , 姬长英
( 南京农业大学 工学院 , 江苏 南京 20 3 ) 10 1
关键词 : 机器视 觉; 成行作物 ; 精量喷洒 系统
中 图分 类 号 : r 26 文 献 标识 码 : 文 章 编 号 :0 1 8 8 (0 7 0 0 6 0 q 2 .2 S4 A 10 — 5 120 )2— 0 3- 3
Re e r h o e ii n Ba d S a i y t m s d o a h n so s a c n Pr cso n pr y ng S se Ba e n M c i e Vii n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本课题要求设计一个机构,这个机构主要是基于机器视觉信号上,对作物的有无进行判别,并进行药液的喷洒,药液的喷洒在离开作物时不能突然停止,以至最后的作物喷药不足。
所以采用一个PWM脉宽调制电路,控制电磁阀,使喷头喷药时能够适当的延长一点时间,以至所有的作物都能被喷药。
基于机器视觉的杂草对准喷药控制系统。
本文的主要研究内容如下:1、施药机构的分析2、液压元件选用3、PWM脉宽调制控制系统4、系统压力损失计算关键词:喷药控制系统,脉宽调制( PWM ),精准施药AbstractThis task should design a machine which base on the signal of machine vision. It should distinguish is there have corps or no And then spray pesticide. The pesticide should not stop suddenly so as to some crops do not insufflated. So we use PWM to control the electric valve to prolong a little time of spray so the crops will insufflated all fully the spraying control system aiming at weed in row wheat based on machine vision was designed and developed on the basis of research on abroad and domestic .The contents of the study could briefly summarized as follows1. The analysis of the control machine2. The selection component liquid press3. The design of PWM system4. The wastage of the systemKey words:spray control system, Pulse-width modulation, Precision spray目录摘要 (2)Abstract (2)目录 (3)1.引言 (4)2.液压回路 (5)2.1 液压回路的原理 (5)2.2 布局图 (5)3.液压系统 (6)3.1 液压元件选用 (6)3.1.1 喷头的选用 (6)3.1.2 水泵的选用 (6)3.1.3 溢流阀的选用 (7)3.1.4 单向阀的选用 (8)3.1.5 电磁换向阀的选用 (8)3.1.6 管接头的选用 (8)3.1.7 水管的选用 (9)3.2.PWM 脉宽调制控制 (9)3.2.1脉宽调制(PWM) (9)3.2.2 PWM电路 (10)3.2.3 流量控制原理 (10)3.3系统中的压力损失 (11)3.3.1管路沿程损失 (11)3.3.2元件的局部损失 (11)4 .总结 (13)参考文献 (14)致谢 (15)1.引言长期以来,人们赖以生存的食物靠栽种植物和饲养动物等方法来提供,然而在栽种植物过程中,不可避免地要遇到防治病虫害的问题。
对农田作物病虫害防治一般来说有三种方法,一是利用自然天敌,自然界很多作物害虫都有其天敌,合理地利用它的自然天敌可以有效地防止作物病虫害的发生和蔓延,而且也减少了农药的使用;二是人工清除,用手或借助一些简单机械设备来防治;三是用化学防治的方法,通过喷洒农药来消灭害虫和细菌等。
随着时代的发展,人工防治的方法已逐渐被淘汰,化学防治成为目前控制病虫危害的主要手段。
〔11,而防治效果的好坏,喷施技术十分重要。
目前,国内农民对作物喷药都是采取人工喷洒或半机械化作业,一方面对人身伤害很大,遇到恶劣天气人在作业时甚至容易中毒。
另一方面喷药时也不是精确对准农作物,往往也喷在土壤上,不仅浪费了农药,增加了作物的农药残留量,而且喷在土壤中的农药易造成土壤酸化和地下水污染。
随着农药的大量使用,其残留在农作物和土壤中的农药对人身和环境的危害也与日俱增,这跟现代农业要求精准高效、绿色环保的要求是背道而驰的。
因此,有必要研制一种基于机器视觉的高效可行的喷药装置,让机器代替人在田间作业的同时能比较精准地对准农作物喷药,以降低人的劳动强度,提高药效和保护农田环境。
同时国家十一五规划中己将研究高效低污染的喷药技术和植保装备技术作为重大攻关项目,而且国家中长期科学和技术发展纲要也已把农业精准作业和信息化列为重大课题。
在精准农业的不断发展壮大和农业生产从机械化、自动化逐步向智能化方向发展的趋势下,智能化农业机械必将成为未来农业生产的主要装备。
〔21。
本课题就是基于这一背景下着手准备的,研究基于机器视觉的作物对行喷药控制系统不仅对农田作物喷药自动化具有十分重要的意义,而且也是精准农业技术体系的重要组成部分和实现精准农业中变量技术中的重要环节。
2.液压回路2.1 液压回路的原理系统要求完成的设计是基于机器视觉基础上。
因此,确定用到PWM脉宽调制控制,由信号发生器,通过PWM来使方波信号的占空比发生改变,使的在有作物的情况下可以延长喷洒,而不会出现有的作物漏喷的情况。
如图1,为液压回路图1 液压回路原理:药液通过水泵抽出,当信号发生器发出的方波为低电平时,电磁阀没有接通,药液通过溢流阀溢流回药液箱;当信号发生器的方波为高电平时,PWM 脉宽调制工作,使得电磁阀通电,电磁阀打开,药液通过电磁阀流到喷嘴,喷出药液。
要求:微型水泵的最大输出压力应当与喷头的最大工作压力相适应。
且溢流阀和电磁换向阀的最低工作压力应该大于微型水泵的最大工作压力。
才能保证溢流阀和电磁换向阀工作时不会应工作压力过大而损坏。
2.2 布局图初定布局图如下图2:图2 布局图3. 液压系统3.1 液压元件选用3.1.1喷头的选用 液压系统采用市场上普遍采用的N60系列钢玉瓷喷头,如图3图3 n60喷头规格参数:孔径规格mm 0.60外牙 T No. 10/32unc操作压力Mpa 0.20~0.45管路中总的压力损失321j j j f j h h h h h +++=∑=0.00091m+510352.4-⨯ m+510656.4-⨯ m+510637.3-⨯ m=0.00104m1.04mm (水柱)由此可以得出,液压沿程损失是很小的,所以微型水泵以及整个液压回路是可以正常工作。
4. 总结在这次毕业设计的过程中,让我复习了以前学过很多知识,比如说液压传动,电工学等,让我进一步熟悉了设计的资料查询方法,资料的运用等。
也让我重新熟悉了AUTO CAD和PROE以及OFFICE软件的应用。
这些都将会是在我以后的工作中起积极地作用。
此次毕业设计,还没有达到很理想的地步,有些地方还是有些缺陷,比如说压力损失计算方面,CAD图的处理方面等细节处。
今后将在我的工作中注重加强。
参考文献[1] 上海煤矿机械研究所编.液压传动手册,上海人民出版社。
[2] 陈奎生主编.液压与气压传动,武汉理工大学出版社。
[3] 机械设计手册 2第二版 ,机械工业出版社。
[4] 机械设计手册 5第二版 ,机械工业出版社。
[5] 闻徳荪主编.工程流体力学(水力学)第二版上册,高等教育出版社。
[6] 余桂英郭纪林主编. AUTO CAD 2006中文版实用教程,大连理工出版社。
[7] 谭建荣,张树有,陆国栋,施岳定编.图学基础教程,高等教育出版社。
[8] 中南五省(区)九院(校)《机械制图》写作编写组编. 机械制图,人民教育出版社。
[9] 饶洪辉.基于机器视觉的作物对行喷药控制系统研究,南京农业大学博士学位论文,2006.12:152-157[10] 傅泽田,祁力钧,王俊红.精准施药技术研究进展与对策, 农业机械学报.2006.5:61-65[11] 李会芳、邱白晶、刘保玲等.对精确农业中变量喷雾控制的研究,中国农机化报.2007.5:24-43[12] 陈勇,郑加强.精确施药可变量喷雾控制系统的研究, 农业工程学报.2005.3:142-150[13] 王兆安,黄俊. 电力电子技术,机械工业出版社。
[14] 邓巍丁为民.基于PWM技术的连续式变量喷雾装置设计与特性分析,南京农业大学博士学位论文,2007, 43 (6): 156-159[15] 肖安岂,刘玲腾.自动控制系统及应用,北京:清华大学出版社。
[16] 邓巍.喷雾图像处理及脉宽调制甲WM)变量喷雾的雾化特性研究,南京农业大学博士学位论文,2007, 12: 461 - 462致谢在此,我要向我的指导老师饶洪辉博士致以崇高的敬意!饶老师深厚渊博的知识、严谨踏实的治学态度和平易近人的性格使我受益匪浅!从本文的选题到课题的深入,导师都给以精心的指导。
在此我再次向饶洪辉老师表达最衷心的感谢!感谢他在论文遇到难题后抽空指点我。
他丰富的知识和敏捷的思维和乐于助人的精神是我学习的榜样。
感谢我的搭档鲁永华同学,我们一起在饶老师的指点下共同克服困难,解决难题。
感谢我的师妹陈斯文同学在电脑制图上给我的帮助。
谢谢所有教过我们机制班的老师,没有你们的悉心教导,我们就不可能学有所成;感谢工学院的各位领导对我们的关心和帮助.谢谢你们!!。