Vi-CarrealTime软件资料Event
labview real-time模块原理
labview real-time模块原理引言:LabVIEW是一款流行的图形化编程语言,广泛应用于科学研究、工业控制和数据采集等领域。
其中,LabVIEW Real-Time模块是一种用于实时控制和数据采集的特殊模块。
本文将详细介绍LabVIEW Real-Time模块的原理和工作方式。
正文:1. 实时控制的基本原理1.1 实时系统的定义与特点实时系统是指在严格的时间要求下,能够及时响应外部事件并完成相应任务的系统。
实时系统具有以下特点:1)对任务响应时间有严格要求;2)具有高可靠性和稳定性;3)需要实时采集和处理数据。
1.2 实时控制的基本原理实时控制系统是一种通过实时采集和处理传感器数据,并根据预设的控制算法来实现对执行器的控制的系统。
其基本原理包括:1)传感器采集数据;2)数据处理和控制算法;3)执行器控制。
1.3 实时控制的应用领域实时控制系统广泛应用于工业自动化、机器人控制、航空航天、医疗设备等领域。
LabVIEW Real-Time模块提供了一种方便快捷的实现实时控制系统的方法。
2. LabVIEW Real-Time模块的工作原理2.1 实时嵌入式硬件LabVIEW Real-Time模块使用实时嵌入式硬件来实现实时控制。
这些硬件通常包括实时处理器、实时操作系统和与外部设备通信的接口。
2.2 实时嵌入式软件LabVIEW Real-Time模块提供了一套专门的实时嵌入式软件,用于开发和部署实时控制系统。
这些软件包括实时操作系统、实时控制器和实时应用程序。
2.3 实时控制器实时控制器是LabVIEW Real-Time模块的核心组件,它负责实时控制系统的数据采集、处理和控制。
实时控制器可以通过网络与LabVIEW开发环境进行通信,实现远程监控和控制。
2.4 实时应用程序实时应用程序是LabVIEW Real-Time模块的用户界面,用于配置和监控实时控制系统。
用户可以通过实时应用程序进行参数设置、数据监测和控制命令发送。
Vi-CarrealTime软件资料xpcOverlay

Simulink/xpc常用函数
getxpcinfo 用于查看目标机上安装了那些板卡
Intel ***** Bus 2, Slot 10, IRQ 3 Ethernet Controller VendorID 0x8086, DeviceID 0x100e, SubVendorID 0x8086, SubDeviceID 0x001e
Vi-CarRealTime模 数据采集目标机 型目标机
xpc系统测试
保证网络连接正常,宿主机与目标机在信息
### xPC Target Test Suite 2.0.1 ### Host-Target interface is: TCP/IP (Ethernet) ### Test 1, Ping target system using standard ping: ... OK ### Test 2, Ping target system using xpctargetping: ... OK ### Test 3, Reboot target using direct call: ...... OK ### Test 4, Build and download xPC Target application using model xpcosc: ... OK ### Test 5, Check host-target communication for commands: ... OK ### Test 6, Download xPC Target application using OOP: ... OK ### Test 7, Execute xPC Target application for 0.2s: ... OK ### Test 8, Upload logged data and compare it with simulation: ... OK ### Test Suite successfully finished 入xpctest
LabVIEW 2015 Real-Time Module版本说明说明书
RELEASE AND UPGRADE NOTESLabVIEW Real-Time Module Version 2015This document provides system requirements, installation instructions, descriptions of new features, and information about upgrade and compatibility issues for the LabVIEW 2015 Real-Time Module.Refer to the Getting Started with the LabVIEW Real-Time Module manual for exercises you can complete to familiarize yourself with the Real-Time Module.TipRefer to the Real-Time Module Best Practices book in the LabVIEW Helpfor programming recommendations on designing, developing, and deploying applications with the LabVIEW Real-Time Module. Select Real-Time Module»Real-Time Module Best Practices on the Contents tab of the LabVIEW Help to display this book.ContentsSystem Requirements (2)Installing the LabVIEW 2015 Real-Time Module (2)Installing Japanese and Simplified Chinese Languages (3)Activating the Real-Time Module (3)Configuring Real-Time Targets (3)New Features (4)Shared Libraries on NI Linux Real-Time Targets (4)Getting Started with a Real-Time Application (4)NI Device Monitor Notification for RT Target Discovery (4)New Hardware Support (4)NI Linux Real-Time Kernel Updates (4)SELinux Support on NI Linux Real-Time Targets (5)Calibrating Touchscreen Monitors on the Embedded UI (5)Upgrade and Compatibility Issues (5)Known Issues with the Real-Time Module (5)Where to Go from Here (5)Related Documentation and Examples (5)NI Website (6)Worldwide Support and Services (6)™2||LabVIEW Real-Time Module Release and Upgrade Notes System RequirementsIn addition to the LabVIEW system requirements listed in the LabVIEW Readme , the LabVIEW 2015 Real-Time Module has the following requirements:•LabVIEW 2015 Full or Professional Development System (32-bit)•At least 200 MB of disk space in addition to the LabVIEW-recommended minimum •RT target hardware and driver software •One of the following operating systems for application development:–Windows 8 (32-bit)–Windows 8 (64-bit with 32-bit LabVIEW installed)–Windows 7 (32-bit)–Windows 7 (64-bit with 32-bit LabVIEW installed)–Windows Server 2003 R2 (32-bit)–Windows Server 2008 R2 (64-bit with 32-bit LabVIEW installed)–Windows Vista (32-bit)–Windows Vista (64-bit with 32-bit LabVIEW installed)–Windows XP Pro (Service Pack 3)Note You might need more memory than the LabVIEW-recommended minimum depending on the size of the application you design in LabVIEW on the host computer.Installing the LabVIEW 2015 Real-Time Module Complete the following steps to install LabVIEW and the Real-Time Module on a development computer:1.Log in to the development computer as an administrator or as a user with administrative privileges.2.Insert the LabVIEW 2015 Platform media.NoteTo request or download additional media, refer to the NI website. If youpurchased this product with an NI Software Suite or NI Product Bundle, use the installation media that shipped with your purchase to install this product.3.Follow the instructions on the screen to install software in the following order:a.LabVIEW b.Real-Time Module c.Device DriversNote Refer to your hardware-specific documentation for information aboutinstalling the appropriate device drivers.LabVIEW Real-Time Module Release and Upgrade Notes |© National Instruments |3The Real-Time Module installs the following real-time operating systems (RTOSes). Refer to the specific RT target hardware documentation for information about which RTOS your RT target uses.•NI Linux Real-Time •Phar Lap ETS •VxWorksInstalling Japanese and Simplified Chinese Languages After you install the Real-Time Module on your development computer, you can complete the following steps to install and use Japanese and Simplified Chinese languages on an RT target:e the LabVIEW Real-Time Software Wizard in NI Measurement & AutomationExplorer (NI MAX) to install the Language Support for Japanese or Language Support for Simplified Chinese software component on the RT target. Refer to the Measurement & Automation Explorer Help for information about the LabVIEW Real-Time Software Wizard.2.Open the System Settings tab and select Japanese or Simplified Chinese as the Locale .Note You cannot use Japanese or Simplified Chinese characters in directory names or filenames on the RT target.Activating the Real-Time ModuleThe Real-Time Module relies on licensing activation. When the evaluation period expires, you must activate a valid Real-Time Module license to continue using the Real-Time Module. You must create an User Profile to activate your software.You can use the NI License Manager, available by selecting Start»All Programs»National Instruments»NI License Manager , to activate NI products. (Windows 8)Click NI Launcher and select NI License Manager in the window that appears.Refer to the National Instruments License Manager Help , available by selecting Help»Contents in the NI License Manager, for information about activating NI products.Configuring Real-Time TargetsUse NI MAX to configure RT targets and to install software and drivers on targets. You can install NI MAX from the LabVIEW Platform media.•Networked RT Targets —Refer to the MAX Remote Systems Help book in theMeasurement & Automation Explorer Help , available by selecting Help»MAX Help from MAX, for information about configuring networked RT targets.•Desktop PC Targets —Refer to the Using Desktop PCs as RT Targets with theLabVIEW Real-Time Module document for information about configuring a desktop PC as a networked RT target. Open the labview\manuals directory and double-click RT_Using_PC_as_RT_Target.pdfto open the document.Note If you install NI Web-based Configuration & Monitoring on an RT target, Array you can use a web browser to perform common monitoring and configuration taskson the target. On the Contents tab in the LabVIEW Help, select Fundamentals»Working with Projects and Targets»How-To»Monitoring and Configuring aRemote Device from a Web Browser for information about NI Web-basedConfiguration & Monitoring.New FeaturesThe LabVIEW 2015 Real-Time Module includes the following new features. Refer to theLabVIEW Help, available by selecting Help»LabVIEW Help, for more information about thesefeatures.Shared Libraries on NI Linux Real-Time T argetsThe LabVIEW 2015 Real-Time Module includes support for creating shared libraries onNI Linux Real-Time targets. You can use shared libraries to share the functionality of your VIswith other developers.Getting Started with a Real-Time ApplicationThe LabVIEW 2015 Real-Time Module includes a tutorial that guides you through creating areal-time application. The tutorial demonstrates VIs that acquire and process data on the RTtarget and display that data on the host computer. Navigate to the Tutorial: Creating a Real-TimeApplication topic of the LabVIEW Help to view the tutorial.NI Device Monitor Notification for RT T arget Discovery The LabVIEW 2015 Real-Time Module includes support for simplified device discovery and configuration. When you connect an NI Linux Real-Time target to a host computer using an Ethernet over USB connection, the NI Device Monitor displays the RT target IP address and allows you to launch LabVIEW, NI MAX, and NI Web-based Configuration & Monitoring, as well as access Getting Started information available on /getting-started. New Hardware SupportThe LabVIEW 2015 Real-Time Module supports new RT targets, including the sbRIO-9607,sbRIO-9627, sbRIO-9637, and the NI3173 RT Industrial Controller.NI Linux Real-Time Kernel UpdatesThe LabVIEW 2015 Real-Time Module includes updates to the NI Linux Real-Time kernel.These updates include networking improvements, bug fixes, and security updates. NI alsoprovides new packages in the NI Linux Real-Time repository. These packages include GCC 4.8,MySQL, and PHP. (ARM-based targets) The LabVIEW 2015 Real-Time Module updates thekernel on NI Linux Real-Time targets from version 3.2 to version 3.14. (Intel x64-basedtargets) The LabVIEW 2015 Real-Time Module updates the kernel on NI Linux Real-Timetargets from version 3.10 to version 3.14.4||LabVIEW Real-Time Module Release and Upgrade NotesSELinux Support on NI Linux Real-Time T argetsThe LabVIEW 2015 Real-Time Module includes the SELinux security policy on NI Linux Real-Time targets. After configuring SELinux, you can control access between applications and resources and enforce a wide range of security goals, from sandboxing applications to restricting users to a limited set of resources. Visit /info and enter the Info Code RTSecurity to learn about security on real-time systems.Calibrating T ouchscreen Monitors on the Embedded UI The LabVIEW 2015 Real-Time Module includes the RT Calibrate Touchscreen VI on the RT Utilities palette. This VI opens an interactive wizard that allows end users to calibrate touch panel monitors on RT targets that support the embedded UI.Upgrade and Compatibility IssuesYou might encounter compatibility issues when upgrading to the LabVIEW 2015 Real-Time Module from the LabVIEW 2014 Real-Time Module. Refer to previous versions of the LabVIEW Real-Time Module Release and Upgrade Notes, available on /manuals, for changes in previous versions of the Real-Time Module.Known Issues with the Real-Time ModuleRefer to the NI website at /info and enter the Info Code LVRT2015KIL to access the known issues for the LabVIEW 2015 Real-Time Module.Where to Go from HereNI provides many resources to help you succeed with your NI products. Use the following resources as you start exploring LabVIEW and the Real-Time Module.Related Documentation and ExamplesUse the following resources to learn more about using LabVIEW and the Real-Time Module:•LabVIEW Help—Available by selecting Help»LabVIEW Help in LabVIEW. Browse the Real-Time Module book in the Contents tab for an overview of the Real-TimeModule.•Context Help Window—Available by selecting Help»Show Context Help. Context help provides brief descriptions of VIs, functions, and dialog boxes. Context help for most VIs and functions includes a link to the complete reference for a VI or function.•Hardware-Specific Documentation—Some RT targets provide printed documentation as well as content in the LabVIEW Help. Use the hardware documentation for information about using the RT target with LabVIEW and for information about hardwarespecifications.•Examples—Use the NI Example Finder, available by selecting Help»Find Examples from LabVIEW, to browse or search for RT example VIs. You also can access example VIs from the labview\examples\Real-Time Module directory.LabVIEW Real-Time Module Release and Upgrade Notes|© National Instruments|5NI WebsiteRefer to /info and enter the Info Code rttrn to access the product support page for the Real-Time Module.Worldwide Support and ServicesThe National Instruments website is your complete resource for technical support. At / support you have access to everything from troubleshooting and application development self-help resources to email and phone assistance from NI Application Engineers.Visit /services for NI Factory Installation Services, repairs, extended warranty, and other services.Visit /register to register your National Instruments product. Product registration facilitates technical support and ensures that you receive important information updates from NI. National Instruments corporate headquarters is located at 11500 North Mopac Expressway, Austin, Texas, 78759-3504. National Instruments also has offices located around the world. For telephone support in the United States, create your service request at /support or dial 1866ASK MYNI(2756964). For telephone support outside the United States, visit the Worldwide Offices section of /niglobal to access the branch office websites, which provide up-to-date contact information, support phone numbers, email addresses, and current events.Refer to the NI Trademarks and Logo Guidelines at /trademarks for more information on National Instruments trademarks. Other product and company names mentioned herein are trademarks or trade names of their respective companies. For patents covering National Instruments products/technology, refer to the appropriate location: Help»Patents in your software, the patents.txt file on your media, or the National Instruments Patents Notice at /patents. You can find information about end-user license agreements (EULAs) and third-party legal notices in the readme file for your NI product. Refer to the Export Compliance Information at /legal/export-compliance for the National Instruments global trade compliance policy and how to obtain relevant HTS codes, ECCNs, and other import/export data. NI MAKES NO EXPRESS OR IMPLIED WARRANTIES AS TO THE ACCURACY OF THE INFORMATION CONTAINED HEREIN AND SHALL NOT BE LIABLE FOR ANY ERRORS. U.S. Government Customers: The data contained in this manual was developed at private expense and is subject to the applicable limited rights and restricted data rights as set forth in FAR 52.227-14, DFAR 252.227-7014, and DFAR 252.227-7015.© 2000–2015 National Instruments. All rights reserved.371374M-01Jun15。
LabVIEW Real-Time Module配置使用指南说明书

Using Desktop PCs as RT Targets with the LabVIEW Real-Time™ModuleThe LabVIEW Real-Time Module can execute VIs on RT targets runninga real-time operating system. This document contains importantinformation about configuring a desktop PC as an RT target andinformation about installing software on the desktop PC.Refer to the Getting Started with the LabVIEW Real-Time Moduledocument for exercises you can complete to familiarize yourself with theLabVIEW Real-Time Module.ContentsSystem Requirements (2)Configuring a Desktop PC Using a Utility USB Drive (3)Boot from the USB Drive (3)Format a Drive or Partition (4)Configuring a Desktop PC Using a Boot Disk (5)Configuring a Desktop PC Using a Format Disk (6)Installing Software (7)Installing Multiple-CPU Support (8)Resources (8)System RequirementsTo configure a desktop PC as an RT target, ensure that the PC meets thefollowing requirements:•Processor based on the x86 architecture.•Supported Ethernet chipset, the Ethernet device from the LabVIEWReal-Time Deployment License Bundle for Standard PCs, or asupported Ethernet card.•Formatted hard drive or partition on the desktop PC with the FAT32 orReliance file system. Because Windows Vista requires the NTFS filesystem, you cannot install RT Module software on the same partitionas Windows Vista.• 3.5 inch floppy drive or bootable USB port on the desktop PC.etspc for up-to-date information about supported hardware and the specific desktop PCspecifications that National Instruments recommends.Configuring a Desktop PC Using a Utility USB DriveUse a utility USB drive to configure a desktop PC to boot from the USBdrive or to format the hard drive of the desktop PC and then permanentlyinstall the RT Module software on the hard drive of the desktop PC.Create a desktop PC utility USB drive using NI Measurement &Automation Explorer (MAX). Select Tools»RT Disk Utilities»CreateDesktop PC Utility USB Drive in MAX to create the utility USB drive. Boot from the USB DriveUse a utility USB drive to configure a desktop PC to boot from the USBdrive and launch the RT Module software on the hard drive of the desktopPC. If there is no RT Module software installed on the hard drive, the utilityUSB drive boots the PC into safe mode, where you can install software.Complete the following steps to configure a desktop PC to boot using autility USB drive.1.If the desktop PC does not include a motherboard with a supportedEthernet chipset, install a supported Ethernet card or the Ethernetdevice included with the LabVIEW Real-Time Deployment LicenseBundle for Standard PCs in an available PCI slot of the PC.2.Connect a monitor and keyboard to the desktop PC to display andrespond to BIOS configuration utility prompts.Using Desktop PCs as RT © National Instruments Corporation 3Using Desktop PCs as RT TargetsNote National Instruments recommends that you remove from the desktop PC any PCI boards not supported by the LabVIEW Real-Time Module to reduce the possibility of resource conflicts. For example, remove sound cards, SCSI adapters, and modems from the desktop PC.3.Turn on the desktop PC and access the BIOS configuration utility.Note BIOS configurations and configuration interfaces for desktop PCs vary among different manufacturers and system models. Consult the motherboard or system manual for information about accessing and configuring the BIOS settings of the desktop PC.4.Set the boot configuration to use a USB drive as the first boot device. 5.Disable any unnecessary integrated peripherals that use an interruptrequest line (IRQ). For example, disable unused serial ports orintegrated sound on the desktop PC.6.Save the configuration changes and exit the BIOS configuration utility.7.Insert the utility USB drive into an empty USB port on the desktop PCand reboot the desktop PC.8.Select the Boot using software installed on the hard-disk optionfrom the utility USB drive menu. The desktop PC boots into thereal-time operating system or into safe mode. Refer to the InstallingSoftware section for information about installing the RT Modulesoftware on the hard drive if the PC boots into safe mode.Format a Drive or PartitionUse a utility USB drive to permanently install the RT Module software onthe hard drive of the desktop PC. A format option of the utility USB driveresets a previously formatted and partitioned hard drive and installs files tothe desktop PC to allow you to start the PC without a boot disk.Caution The format utility of the utility USB drive overwrites the hard drive boot sector and master boot record, erasing all pointers to data on the drive. If you have a dual-boot configuration, the changes to the master boot record remove the ability to boot into the secondary operating system.Complete the following steps to format the hard drive and configure adesktop PC using a utility USB drive.1.If the desktop PC does not include a motherboard with a supportedEthernet chipset, install a supported Ethernet card or the Ethernetdevice included with the LabVIEW Real-Time Deployment LicenseBundle for Standard PCs in an available PCI slot of the PC.2.Connect a monitor and keyboard to the desktop PC to display andrespond to BIOS configuration utility prompts.Using Desktop PCs as RT Targets Note National Instruments recommends that you remove any PCI boards not supported by the LabVIEW Real-Time Module to reduce the possibility of resource conflicts. For example, remove sound cards, SCSI adapters, and modems from the desktop PC.3.Turn on the desktop PC and access the BIOS configuration utility.Note BIOS configurations and configuration interfaces for desktop PCs vary among different manufacturers and system models. Consult the motherboard or system manual for information about accessing and configuring the BIOS settings of the desktop PC.4.Set the boot configuration to use a USB drive as the first boot device. 5.Disable any unnecessary integrated peripherals that use an interruptrequest line (IRQ). For example, disable unused serial ports orintegrated sound on the desktop PC.6.Save the configuration changes and exit the BIOS configuration utility.7.Insert the utility USB drive into an empty USB port on the desktop PCand reboot the desktop PC.8.Select the Format hard disk option from the utility USB drive menu,choose a file system, and follow the directions on the screen.Formatting with the Reliance File SystemReliance is a transactional file system that provides data integrity in theevent of a power interruption. If a FAT-formatted RT target reboots orpowers down during application execution due to power loss or userintervention, data corruption can occur. The Reliance file system maintainsdata integrity in such cases. Refer to the Datalight website at for more information about the Reliance file system.After formatting with the Reliance file system, remove the utility USBdrive and reboot the desktop PC to boot into the real-time operating system.The desktop PC boots into safe mode the first time the system boots fromthe hard drive. Refer to the Installing Software section for informationabout installing the RT Module software on the hard drive if the PC bootsinto safe mode.Formatting with the FAT File SystemFormat with the FAT file system if you need to maintain compatibility withexisting FAT-formatted systems.After formatting with the FAT file system, remove the utility USB drive andreboot the desktop PC to boot into the real-time operating system. Thedesktop PC boots into safe mode the first time the system boots from thehard drive. Refer to the Installing Softwaresection for information about© National Instruments Corporation 5Using Desktop PCs as RT Targetsinstalling the RT Module software on the hard drive if the PC boots into safe mode.Configuring a Desktop PC Using a Boot DiskYou can use a boot disk to launch the RT Module software that you installon the hard drive of a desktop PC. If there is no RT Module softwareinstalled on the hard drive, the desktop PC boots into safe mode, where youcan install software.Create a desktop PC boot disk using NI Measurement & AutomationExplorer (MAX). Select Tools»RT Disk Utilities»Create Desktop PCBoot Disk in MAX to create the desktop PC boot disk.Note You cannot create a boot disk with Windows Vista. You also cannot use a boot disk with a Reliance-formatted hard drive or partition. When you need to use a boot disk with a Reliance-formatted hard drive or partition, you can use a utility USB drive instead.Complete the following steps to configure a desktop PC using a boot disk.1.If the desktop PC does not include a motherboard with a supportedEthernet chipset, install a supported Ethernet card or the Ethernetdevice included with the LabVIEW Real-Time Deployment LicenseBundle for Standard PCs in an available PCI slot of the PC.2.Connect a monitor and keyboard to the desktop PC to display andrespond to BIOS configuration utility prompts.Note National Instruments recommends that you remove from the desktop PC any PCI boards not supported by the LabVIEW Real-Time Module to reduce the possibility of resource conflicts. For example, remove sound cards, SCSI adapters, and modems from the desktop PC.3.Turn on the desktop PC and access the BIOS configuration utility.Note BIOS configurations and configuration interfaces for desktop PCs vary among different manufacturers and system models. Consult the motherboard or system manual for information about accessing and configuring the BIOS settings of the desktop PC.4.Set the boot configuration to use the floppy drive as the first boot device. 5.Disable legacy USB support. 6.Disable any unnecessary integrated peripherals that use an interruptrequest line (IRQ). For example, disable unused serial ports orintegrated sound on the desktop PC.7.Save the configuration changes and exit the BIOS configuration utility.Using Desktop PCs as RT Targets 8.Insert the desktop PC boot disk in the floppy drive and reboot thedesktop PC. The desktop PC boots into the real-time operating systemor into safe mode. Refer to the Installing Software section forinformation about installing the RT Module software on the hard drive if the PC boots into safe mode.Configuring a Desktop PC Using a Format DiskYou can use a format disk to permanently install the RT Module softwareon the hard drive of the desktop PC. A format disk resets a previouslyformatted and partitioned hard drive and installs files to the desktop PC toallow you to start the PC without a boot disk.Create a desktop PC format disk using NI Measurement & AutomationExplorer (MAX). Select Tools»RT Disk Utilities»Create Desktop PCFormat Hard Drive Disk in MAX to create the desktop PC format disk.NoteYou cannot create a format disk with Windows Vista. You can use a format disk to format with the FAT file system only. To format with the Reliance file system, you must use a utility USB drive.Caution A format disk overwrites the hard drive boot sector and master boot record, erasing all pointers to data on the drive. If you have a dual-boot configuration, the changes to the master boot record remove the ability to boot into the secondary operating system.Complete the following steps to configure a desktop PC using a formatdisk.1.If the desktop PC does not include a motherboard with a supportedEthernet chipset, install a supported Ethernet card or the Ethernetdevice included with the LabVIEW Real-Time Deployment LicenseBundle for Standard PCs in an available PCI slot of the PC.2.Connect a monitor and keyboard to the desktop PC to display andrespond to BIOS configuration utility and format prompts.Note National Instruments recommends that you remove from the desktop PC any PCI boards not supported by the LabVIEW Real-Time Module to reduce the possibility of resource conflicts. For example, remove sound cards, SCSI adapters, and modems from the desktop PC.3.Turn on the desktop PC and access the BIOS configuration utility.Note BIOS configurations and configuration interfaces for desktop PCs vary among different manufacturers and system models. Consult the motherboard or system manual forinformation about accessing and configuring the BIOS settings of the desktop PC.© National Instruments Corporation 7Using Desktop PCs as RT Targets4.Set the boot configuration to use the floppy drive as the first boot device. 5.Disable legacy USB support. 6.Disable any unnecessary integrated peripherals that use an interruptrequest line (IRQ). For example, disable unused serial ports orintegrated sound on the desktop PC.7.Save the configuration changes and exit the BIOS configuration utility.8.Insert the desktop PC format disk in the floppy drive and reboot the PC.9.Follow the directions that appear on the screen. 10.Remove the desktop PC format disk from the floppy drive and rebootthe desktop PC to boot into the real-time operating system. Thedesktop PC boots into safe mode the first time the system boots fromthe hard drive. Refer to the Installing Software section for informationabout installing the RT Module software to the hard drive if the PC boots into safe mode.Installing SoftwareComplete the following steps to install software on the desktop PC.1.Boot the desktop PC into the real-time operating system. The desktopPC loads with the basic real-time operating system and a null IPaddress of 0.0.0.0.Tip You can connect a monitor to the desktop PC to display startup messages.2.Open MAX on another computer in the same subnet and expand theRemote Systems category. MAX lists the desktop PC as 0.0.0.0 inthe Remote Systems category.3.Click on the 0.0.0.0 entry to access the Network Settings tab.4.Enter a name for the RT target in the Name text box.5.Set the network configuration options of the RT target in theIP Settings section and click the Apply button.Refer to the Configuring Network Settings book, accessible bybrowsing to MAX Remote Systems Help»LabVIEW Real-TimeTarget Configuration»Configuring Network Settings from theContents tab of the MAX Help , for information about configuringnetwork settings .6.Reboot the RT target. The RT target appears in the Remote Systems category with the assigned name. 7.Expand the RT target in the Remote Systems category and select theSoftwarecategory.National Instruments, NI, , and LabVIEW are trademarks of National Instruments Corporation.Refer to the Terms of Use section on /legal for more information about NationalInstruments trademarks. Other product and company names mentioned herein are trademarks or tradenames of their respective companies. For patents covering National Instruments products, refer to theappropriate location: Help»Patents in your software, the patents.txt file on your CD, or/patents .© 2004–2007 National Instruments Corporation. All rights reserved.371857E-01Dec078.Click the Add/Remove Software button in the toolbar to launch the LabVIEW Real-Time Software Wizard. 9.Install the LabVIEW Real-Time software and device drivers that yourequire on the RT target. Refer to the NI Web site at /info andenter the info code etspc for the latest information about supported software.Installing Multiple-CPU SupportTo take advantage of parallel processing on a multiple-CPU system, use theLabVIEW Real-Time Software Wizard in MAX to install the NI RTExtensions for SMP. Refer to the MAX Help for information about using theLabVIEW Real-Time Software Wizard. Refer to the Optimizing RTApplications for Multiple-CPU Systems book of the LabVIEW Help forinformation about optimizing RT applications for multiple-CPU systems.Note Single-CPU systems perform best without the NI RT Extensions for SMP. Also, some applications, such as those that consist mainly of single-point I/O, can achieve lower latency using a single CPU without the NI RT Extensions for SMP. Refer to the National Instruments Web site at /info and enter the info code rtsmp for further details about optimizing RT applications for systems with multiple CPUs.Resources•Refer to the NI Web site at /info and enter the info code etspc for more information about using desktop PCs as RT targets.•Refer to the readme_RT.html file on the LabVIEW Real-TimeModule installation CD for information about known issues regardingthe use of desktop PCs as RT targets.•Refer to the Getting Started with the LabVIEW Real-Time Moduledocument for exercises you can complete to familiarize yourself withthe LabVIEW Real-Time Module.•Refer to the LabVIEW Help for more information about the LabVIEWReal-Time Module features. Access the LabVIEW Help fromLabVIEW by selecting Help»Search the LabVIEW Help .。
LabVIEW Real-Time Module 8.6 用户手册说明书

LabVIEW Real-Time Module™Release and Upgrade NotesVersion 8.6This document provides system requirements, installation instructions,descriptions of new features, and information about upgrade andcompatibility issues for version 8.6 of the LabVIEW Real-Time Module.Refer to the Getting Started with the LabVIEW Real-Time Module manualfor exercises you can complete to familiarize yourself with the Real-TimeModule.ContentsSystem Requirements (2)Installing the Real-Time Module 8.6 (3)Activating the Real-Time Module (3)RT Target Configuration (4)New Real-Time Module 8.6 Features (5)CompactRIO Scan Mode Support (5)NI Distributed System Manager Support (6)New VIs for Managing Memory and CPU Resources (7)Reliance™ File System Support (7)Software-Triggered Timing Sources (7)Easier IP Address Setup for RT Targets (7)TDMS Support for VxWorks Targets (8)Improved Ethernet Compatibility (8)Real-Time Execution Trace Toolkit 2.0.1 (8)Activating the Real-Time Execution Trace Toolkit (8)Upgrade and Compatibility Issues (9)Upgrading from RT Module 8.5.x (9)Upgrading from RT Module 8.2.x and Earlier (9)Real-Time Module Examples (10)Known Issues with the Real-Time Module 8.6 (10)System RequirementsTable1 describes the system requirements to run version 8.6 of theReal-Time Module. The Real-Time Module system requirements are inaddition to the LabVIEW system requirements listed in the LabVIEWRelease Notes.Table 1. System Requirements for the Real-Time Module 8.6Platform Media and SystemRequirements Important NotesWindows 2000/XP/Vista National Instrumentsrecommends that you haveat least 300 MB of diskspace for the minimumReal-Time Moduleinstallation or 750 MB ofdisk space for the completeReal-Time Moduleinstallation, which includesthe Real-Time andEmbedded drivers from theNational InstrumentsDevice Drivers media.You might need more memory than the LabVIEW-recommended 1 GB of RAM depending on the size of the application you design in LabVIEW on the host computer.To view and control the front panel of a VI running on an RT target remotely using a Web browser, National Instruments recommends Internet Explorer 5.5 with Service Pack 2 or later.Real-Time Module Release and Upgrade © National Instruments Corporation 3Real-Time Module Release and Upgrade NotesInstalling the Real-Time Module 8.6This section includes information about installing the Real-Time Module on a development, or host, computer from the CD included in theReal-Time Module kit. If you installed the Real-Time Module from the LabVIEW 8.6 Platform DVD, you do not need to reinstall the Real-Time Module from the CD.Note You must install LabVIEW 8.6 before attempting to install the Real-Time Module 8.6. Refer to the LabVIEW Release Notes for the LabVIEW installation instructions.Complete the following steps to install the Real-Time Module on the host computer.1.Disable any automatic virus detection programs before you install. Some virus detection programs interfere with the installation program.2.Log on as an administrator or as a user with administrator privileges.3.Insert the LabVIEW Real-Time Module installation CD into theCD-ROM drive. The LabVIEW Real-Time Module installationprogram runs automatically.4.Follow the instructions that appear on the screen. The prompt directsyou to install the Real-Time Module and activate your Real-TimeModule license. Refer to the Activating the Real-Time Module sectionof this document for more information about activating the Real-TimeModule.5.Install the Real-Time and Embedded drivers and any other drivers thatyou require from the National Instruments Device Driver media.Activating the Real-Time ModuleRefer to the Activation Instructions for National Instruments Software for information about activation. You also can activate software at /activate.RT Target ConfigurationUse Measurement & Automation Explorer (MAX) to configure RT targetsand to install software and drivers on targets.•Networked RT Targets—Refer to the Max Remote Systems Helpbook in the Measurement & Automation Explorer Help, available byselecting Help»MAX Help from MAX, for information aboutconfiguring networked RT targets.•Desktop PC Targets—Refer to the Using Desktop PCs as RT Targetswith the LabVIEW Real-Time Module document for information aboutconfiguring a desktop PC as a networked RT target. You can access thedocument from Windows by selecting to install the Real-Time Moduledocumentation when you install the Real-Time Module. Select Start»All Programs»National Instruments»LabVIEW 8.6»LabVIEWManuals to open the labview\manuals directory and thendouble-click RT_Using_PC_as_RT_Target.pdf to open thedocument.Real-Time Module Release and Upgrade New Real-Time Module 8.6 FeaturesThe Real-Time Module 8.6 includes the following new features. Refer tothe LabVIEW Help, available by selecting Help»Search the LabVIEWHelp, for more information about the following new features.CompactRIO Scan Mode SupportThe Real-Time Module 8.6 supports the new CompactRIO Scan Modefeatures. Refer to the Getting Started with CompactRIO and LabVIEW:Scan Mode Edition manual for an introduction to using the newCompactRIO Scan Mode features.NI Scan Engine SupportThe Real-Time Module 8.6 includes support for the NI Scan Engine. TheNI Scan Engine enables efficient access to coherent sets of I/O channelsusing a scan that stores data in a global memory map and updates all valuesat a single rate. Refer to the Real-Time Module»Real-Time ModuleConcepts»Accessing I/O with the NI Scan Engine»Using the NI ScanEngine topic on the Contents tab of the LabVIEW Help for moreinformation about the NI Scan Engine and related features.I/O Variable SupportIf you have an RT target with the NI Scan Engine installed, you can takeadvantage of the I/O variable, a new variable type that simplifies I/Oaccess. LabVIEW automatically detects I/O modules connected to targetswith the NI Scan Engine installed, and creates an I/O variable in theProject Explorer window for each connected I/O channel. Refer to theReal-Time Module»Real-Time Module Concepts»Accessing I/O withthe NI Scan Engine»Using I/O Variables topic on the Contents tab of theLabVIEW Help for more information about I/O variables.I/O Forcing SupportI/O variables support forcing for debugging and manual control of I/O. Usethe NI Distributed System Manager to force and unforce I/O valuesmanually. Use the Forcing VIs on the NI Scan Engine palette to force andunforce I/O values programmatically. Refer to the VI and FunctionReference»Measurement I/O VIs and Functions»NI Scan EngineVIs»Forcing VIs book on the Contents tab of the LabVIEW Help for moreinformation about the Forcing VIs.© National Instruments Corporation5Real-Time Module Release and Upgrade NotesScan Engine FaultsRT targets with the NI Scan Engine installed use faults to addressasynchronous error conditions. Refer to the Real-Time Module»Real-Time Module Concepts»Accessing I/O with the NI ScanEngine»Scan Engine Faults topic on the Contents tab of the LabVIEWHelp for more information about faults.Scan Engine VIsThe Real-Time Module 8.6 installs the new NI Scan Engine palette as asubpalette of the Measurement I/O palette. You can use the NI Scan EngineVIs to programmatically interface with the scan engine running on thetarget. Refer to the VI and Function Reference»Measurement I/O VIsand Functions»NI Scan Engine VIs book on the Contents tab of theLabVIEW Help for more information about the NI Scan Engine VIs.Project & System Comparison DialogThe Real-Time Module 8.6 includes a new Project & SystemComparison dialog box that you can use to resolve conflicts that resultfrom project configuration or hardware changes involving targets with theNI Scan Engine installed.Function BlocksThe Real-Time Module 8.6 includes standard function blocks defined inthe IEC 1131-3 specification. The functionality of the Real-Time functionblocks partially overlaps with functionality provided by LabVIEW VIs andfunctions. Use function blocks if you want to publish parameter values withshared variables or if you want to use the IEC 1131-3 function blockprogramming paradigm. Refer to the Real-Time Module»Real-TimeVIs»Function Blocks book on the Contents tab of the LabVIEW Help formore information about using function blocks in LabVIEW.NI Distributed System Manager SupportYou can use the new NI Distributed System Manager to monitor andmanage variables, faults, scan engine modes, and system resources on RTtargets. From LabVIEW, select Tools»Distributed System Manager tolaunch the NI Distributed System Manager. Refer to the NI DistributedSystem Manager Help for information about using the NI DistributedSystem Manager.Real-Time Module Release and Upgrade New VIs for Managing Memory and CPU ResourcesThe Real-Time Module 8.6 includes new Real-Time Utilities VIs you canuse to monitor target CPU and memory usage programmatically. TheReal-Time Module also includes new SMP CPU Utilities VIs you can useto specify the set of CPUs available for automatic load balancing on amulti-CPU target with the NI RT Extensions for SMP installed. Refer to theReal-Time Module»Real-Time VIs»Real-Time Utilities VIs book on theContents tab of the LabVIEW Help for information about the Real-TimeUtilities VIs. Refer to the Real-Time Module»Real-Time VIs»SMP CPUUtilities VIs book on the Contents tab of the LabVIEW Help forinformation about the SMP CPU Utilities VIs.Reliance™ File System SupportThe Reliance™ file system provides fast disk access and data preservationin the event of a power interruption. Refer to the Using Desktop PCs as RTTargets with the LabVIEW Real-Time Module document for informationabout installing the Reliance™ file system on an RT Desktop PC target.Reliance™ is a trademark of Datalight, Inc. Copyright 1989–2008Datalight, Inc., All Rights Reserved. Datalight® is a registered trademarkof Datalight, Inc.Software-Triggered Timing SourcesThe Real-Time Module 8.6 supports software-triggered timing sources.You can use software-triggered timing sources to trigger timed structuresbased on software-defined or user-defined events, rather than a hardwareclock. Refer to the Fundamentals»Loops and Structures»Concepts»Timed Structures»Selecting a Timing Source for a Timed Structuretopic on the Contents tab of the LabVIEW Help for information aboutcreating and using software-triggered timing sources.Easier IP Address Setup for RT TargetsRT targets with the Real-Time Module 8.6 installed include automaticnetwork connection capabilities. When you plug an RT 8.6 target into anetwork and turn the target on, the target uses the target name to attempt aDHCP network connection. If the target is unable to initiate a DHCPconnection, the target connects to the network with a link-local IP address.© National Instruments Corporation7Real-Time Module Release and Upgrade NotesTDMS Support for VxWorks TargetsThe Real-Time Module 8.6 includes TDMS support for VxWorks targets.Refer to the VI and Function Reference»Programming VIs andFunctions»File I/O VIs and Functions»TDM Streaming VI andFunctions book on the Contents tab of the LabVIEW Help for informationabout the TDM Streaming VI and functions.Improved Ethernet CompatibilityThe Real-Time Module 8.6 includes expanded Ethernet chipset support forRT Desktop PCs. Refer to the National Instruments Web site at /info and enter the info code etspc for more information about whichEthernet chipsets are compatible with RT Desktop PCs.Real-Time Execution Trace Toolkit 2.0.1The LabVIEW 8.6 Real-Time Module includes a 30-day full-featuredevaluation of the Real-Time Execution Trace Toolkit 2.0.1. The Real-TimeExecution Trace Toolkit includes the Real-Time Execution Trace Tool andthe Execution Trace Tool VIs. You can use the Execution Trace Tool VIsto capture the timing and execution data of VI and thread events forapplications running on an RT target. The Real-Time Execution Trace Tooldisplays the timing and event data, or trace session, on the host computer.In LabVIEW, select Tools»Real-Time Module»Execution Trace Tool todisplay the Real-Time Execution Trace Tool.Refer to the Real-Time Execution Trace Toolkit book in the LabVIEWHelp for information about using the Real-Time Execution Trace Toolkit todebug real-time applications. Select Help»Search the LabVIEW Help todisplay the LabVIEW Help. In the LabVIEW Help, browse to Toolkits»Real-Time Execution Trace Toolkit to view the Real-Time ExecutionTrace Toolkit book.Activating the Real-Time Execution Trace ToolkitRefer to the Activation Instructions for National Instruments Software forinformation about activation. You also can activate software at /activate.Real-Time Module Release and Upgrade Upgrade and Compatibility IssuesUpgrading from RT Module 8.5.xYou might encounter the following compatibility issue when upgrading tothe Real-Time Module 8.6 from the Real-Time Module 8.5.x.Floppy Disk Support DiscontinuedThe Real-Time Module no longer includes updated versions of the PXI andDesktop PC Floppy Disk Utilities. You can still use Measurement &Automation Explorer (MAX) to create previous versions of the RT floppydisks, which will continue to work with newer versions of the Real-TimeModule. However, older versions of the RT floppy disks do not supportdevice drivers added to subsequent versions of the Real-Time Module. Ifyou need to use the latest device drivers, you mush use MAX to create anRT 8.6 USB Utility drive.FieldPoint 20x0 Support DiscontinuedThe Real-Time Module no longer supports FP-20x0 and cFP-20x0 targets.You can still use FP-20x0 and cFP-20x0 targets with LabVIEW, but youcannot install the Real-Time Module 8.6 on FP-20x0 and cFP-20x0 targets.Upgrading from RT Module 8.2.x and EarlierYou might encounter the following compatibility issues when upgrading tothe Real-Time Module 8.6 from the Real-Time Module 8.2.x and earlier.RTX Support DiscontinuedThe Real-Time Module no longer supports RTX desktop targets and nolonger contains the Shared Memory VIs. Refer to the Using Desktop PCsas RT Targets with the LabVIEW Real-Time Module document forinformation about configuring a PC as an ETS RT target.IrDA Support DiscontinuedThe Real-Time Module no longer supports the IrDA protocol and no longercontains the associated IrDAVIs.Timed Loop Priority RestrictionThe Timed Loop does not support Priority values greater than 65,535.© National Instruments Corporation9Real-Time Module Release and Upgrade NotesCompatibility with VxWorks 6.1When you install the Real-Time Module 8.6 on the host computer, you alsomust install version 8.6 of the Real-Time Module software on cRIO-901xtargets. The Real-Time Module 8.6 updates the operating system oncRIO-901x targets from VxWorks 6.1 to VxWorks 6.3. Some functions inVxWorks 6.3 are not compatible with VxWorks 6.1. If you use customC code in a LabVIEW application running on a cRIO-901x target, you mustrecompile the .OUT files for VxWorks 6.3. Refer to the NI Web site at/info and enter the info code rtvx for more information.Front Panel:Open Method ErrorIn the Real-Time Module 8.2.1 and earlier, the Front Panel:Open methodfailed without returning an error. The FP.Open method now returnserror53.Real-Time Module ExamplesUse the NI Example Finder, available by selecting Help»Find Examplesfrom LabVIEW, to browse or search for RT example VIs. You also canaccess example VIs from the labview\examples\Real-Time directory. Known Issues with the Real-Time Module 8.6Refer to the readme_RT.html file on the LabVIEW 8.6 Real-TimeModule installation CD for information about known issues with theReal-Time Module 8.6.You also can launch the readme_RT.html file from Windows after youinstall the Real-Time Module. Complete the following steps to access thereadme_RT.html file from Windows.1.Select Start»All Programs»National Instruments»LabVIEW 8.6»Readme to open the labview\readme directory.The labview\readme directory contains the HTML readme files forLabVIEW and any installed LabVIEW modules and add-ons.2.Double-click readme_RT.html to open the LabVIEW Real-TimeModule Readme.Real-Time Module Release and Upgrade National Instruments, NI, , and LabVIEW are trademarks of National Instruments Corporation.Refer to the Terms of Use section on /legal for more information about NationalInstruments trademarks. Other product and company names mentioned herein are trademarks or tradenames of their respective companies. For patents covering National Instruments products, refer to theappropriate location: Help»Patents in your software, the patents.txt file on your CD, or/patents.© 2000–2008 National Instruments Corporation. All rights reserved.371374E-01June08。
Vi-CarrealTime软件资料Modeling and Validation

ADAMS/Car模型导入
自动模型验证
对 比 VI_CarRalTime 与 ADAMS的仿真结果。
Running equivalent set of analysis in A/Car and VI-CarRealTime. 生 成 ADAMS 与 VICarRealTime 的仿真对比 报告
用于从 ADAMS/Car 模型中抽取数据,用于建 立VI-CarRealTime模型 VI-CarRealTIme模型通过以下步骤建立:
1. 2. 3. 4. 5. 6. 7. 创建ADAMS前悬架转配体(包括转向系统) 前悬架参数获取 创建ADAMS后悬架转配体 车身参数提取(包括了整车静态分析与簧载质 量计算) 前后车辆子系统参数提取(包括非簧载质量与 转动惯量) 动力系统参数提取 制动系统参数提取
Vehicle Wizard K&C数据导入
悬架建模所需的信号量
信号中需要LfSpin,即抗点头角,部分K&C试验台不支 持抗点头角的输出。 所有K&C数据的坐标系是基于VI-CRT的车轮坐标系
Vehicle Wizard K&C数据导入
数据文件格式
首行为信号名称 下面是信号数据,中间由空格隔开 VI-CarRealTime命令行界面显示错 误信息 如果出现导入错误请关闭VICarRealTime重启
SuspensionGen
衬套姿态角的确定
右击ADAMS衬套-》Modify Bushing -》直接将Eular角一项填入 VISuspensionGen中的衬套姿态中(注意衬套姿态使用Euler 3-1-3表示, 在SuspensionGen中坐标系与ADAMS一致,即X指向车尾)
SuspensionGen 部分问题
Vi-CarrealTime软件资料Model concept and theory

Fs
δs
Fe
杠杆比
δe
悬架 运动学
车轮位置运动学
轮距: 在设计载荷下,左轮与右轮轮心的距离(在全局坐标系下Y的方向) 轮心X向位移 vs 轮跳(左轮/右轮),车轮X向位移量是轮跳的函数 轮心Y向位移 vs 轮跳(左轮/右轮),车轮y向位移量是轮跳的函数 每一个查表曲线都是将轮跳作为自变量。
悬架 弹性运动学
Cross compliance
概念 在一边的车轮加载,观察另一边车轮的车轮姿态变化。这就 是cross的含义,比较简单的定义方式如下:
这种K&C曲线的定义方式对半独立与非独立悬架非常有效,比较复杂 的另一定义如下:
悬架 弹性运动学
Cross compliance
Output:
Toe 前束 Camber 外倾 Side view angle 抗制动点头 Track variation 轮距变化量 Base variation 轴距变化量
悬架 弹性运动学
车轮姿态参数
Entity
Toe_L Camber_L SVA_L X_L Y_L Toe_R Camber_R SVA_R X_R Y_R F(FX_tr_L,j) F(FX_tr_L,j) F(FX_tr_L,j) F(FX_tr_L,j) F(FX_tr_L,j) F(FX_br_L,j) F(FX_br_L,j) F(FX_br_L,j) F(FX_br_L,j) F(FX_br_L,j) F(FX_br_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j) F(FY_L,j)
SICK EventCam App用户指南说明书
EventCam App SICK AppSpace SensorApps Getting startedDescribed productEventCam App1615765 EventCam App1616071 EventCam App for IPCManufacturerSICK AGErwin-Sick-Str. 179183 WaldkirchGermanyLegal informationThis work is protected by copyright. Any rights derived from the copyright shall bereserved for SICK AG. Reproduction of this document or parts of this document isonly permissible within the limits of the legal determination of Copyright Law. Any modi‐fication, abridgment or translation of this document is prohibited without the expresswritten permission of SICK AG.The trademarks stated in this document are the property of their respective owner.© SICK AG. All rights reserved.Original documentThis document is an original document of SICK AG.2O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICKSubject to change without noticeCONTENTSContents1About this document (4)1.1Further information (4)2Safety information (5)2.1Incorrect Use (5)2.2Hardware Safety (5)2.3General Cybersecurity Notice (5)2.4Intended use (5)3System requirements (6)3.1Hardware (6)3.2App Installation (6)3.3Supported web browser (6)3.4Licensing (6)4Installation (7)4.1Starting SICK AppManager (7)4.2How to use the EventCam App (7)4.3Configuration (10)5Further remarks (17)5.1Parallel Apps (17)5.2EventCam App on Industrial PCs (IPC) (17)5.3Licenses (17)8027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App3 Subject to change without notice1 ABOUT THIS DOCUMENT1About this documentThis document provides important information on how to use products from SICK AG.Prerequisites for safe work are:• Compliance with all safety notes and handling instructions supplied.• Compliance with local work safety regulations and general safety regulations forproduct applicationsThe document is intended to be used by qualified personnel.AdviceRead this document carefully before starting any work, in order to familiarize yourselfwith the product and its function.The instructions constitute an integral part of the product and must be accessible tostaff at all times.This document does not provide information on operating the machine or system inwhich the product is integrated. For information about the machine or system, refer tothe operating instructions of the specific machine.1.1Further informationFurther documentation for the device can be found on the online product page on.The following information is available for download there:•Model-specific online data sheets for device variants, containing technical data,dimensional drawing and specification diagrams•EU declaration of conformity for the product family•Dimensional drawings and 3D CAD dimension models in various electronic for‐mats•Other publications related to the devices described here•Publications dealing with accessories4O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICKSubject to change without noticeSAFETY INFORMATION 2 2Safety information2.1Incorrect UseAny use outside of the stated areas, in particular use outside of the technical specifica‐tions and the requirements for intended use, will be deemed to be incorrect use.•The device does not constitute a safety component in accordance with the respec‐tive applicable safety standards for machines.•The device must not be used in explosion-hazardous areas, in corrosive environ‐ments or under extreme ambient conditions.•Any use of accessories not specifically approved by SICK AG is at your own risk.CAUTIONDanger due to improper use!Any improper use can result in dangerous situations. Therefore, observe the followinginformation:•Device should be used only in accordance with its intended use.•All information in this document must be strictly observed.2.2Hardware SafetyFurther safety information can be found in the related hardware documentation:Operating instructionThe document is available on the online product page.2.3General Cybersecurity NoticeProtection against cybersecurity threats requires a comprehensive and holistic cyberse‐curity concept that must be continuously monitored and maintained. Such a conceptconsists of organizational, technical, process-related, electronic, and physical defenselevels and sets up appropriate measures for the different types of risk. SICK’s productsand solutions must be regarded as an integral part of this concept. Information onCybersecurity can be found at: /psirt.2.4Intended useThe EventCam App is a digital solution for SICK AppSpace products. It enables a SICKcamera to serve as an event camera, so that it records a defined time frame before andafter a trigger.8027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App5 Subject to change without notice3System requirements3.1HardwareSupported products are listed at /eventcamapp and under “Compatible Devices” in the SICK AppPool .3.2App InstallationThe SICK AppManager software tool is required for installing the app. Be sure to use firmware version V1.4.4 or higher.The firmware can be found in the SICK Support Portal or at .3.3Supported web browserLatest Google Chrome is recommended.3.4LicensingThe SensorApp is licensed. Without a license, access to the app is denied.Download the “License Manager” from the SICK AppPoolto license the app.Figure 1: License managerOrder a license via part number 1615765 (EventCam App) or 1616071 (EventCam App for IPC). An activation code will be distributed via e-mail.3 SYSTEM REQUIREMENTS 6O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICK Subject to change without notice4Installation4.1Starting SICK AppManager1.Connect the device to the PC via Ethernet.2.Set the PC to be on the same subnet as the device, but with a different IP address.The default IP address can be found in the hardware documentation.3.Start SICK AppManager. The scan for connected devices starts automatically.4.For app installation instructions, please check the SICK AppManager documenta‐tion SICK AppManager.Figure 2: SICK AppManager4.2How to use the EventCam AppLog into SOPASair via a web browser using the device IP address.There are three operating entity levels.RUNNo password needed.Status information:INSTALLATION 48027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App7Subject to change without notice4 INSTALLATIONFigure 3: RunOPERATORNo password set, needs to be changed.Event download and deletion possible.8O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICKSubject to change without noticeINSTALLATION 4Figure 4: OPERATORMAINTENANCEPassword “main”, needs to be changed.Configuration and camera set up possible.8027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App9Subject to change without notice4 INSTALLATIONFigure 5: MAINTENANCE4.3Configuration4.3.1SettingsHistory: Shows the last sub-categories chosen by the operating entityRefresh: Refreshes the websiteEdit: If activated, enables the functions to change the language, units, and displaymode.10O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICKSubject to change without noticeFigure 6: Settings4.3.1.1LicensingYou can now activate your license on the SOPASair product web page.Click on the Open License Manager button.The License Manager app opens. Follow the step-by-step instructions to activate thelicense.Figure 7: License, 1INSTALLATION 48027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App11Subject to change without noticeFigure 8: License, 24.3.1.2MainThis page displays the following information:•No. of new events •Totally stored events •Free storage•Free space on internal storage •Path (internally or on the SD card)Figure 9: Main4 INSTALLATION12O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICK Subject to change without notice4.3.1.3CameraAn example setup is shown based on the hardware used.Scan for the camera, then click Connect camera . When the camera is connected, the second tab Setup remote camerais activated.Figure 10: Camera, 2On this page, you can activate the Live View and define a ROI (region of interest).You can also change the frame rate, exposure time, gain factor and enable AutoGain .The camera settings are saved automatically.When you leave this page, the live view is switched off automatically.INSTALLATION 48027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App13Subject to change without notice4.3.1.4ConfigurationFigure 11: ConfigurationIf needed, click OPEN LIVE VIEW to start the live stream in a new browser window.Now choose between Video mode (.mkv format) and Picture mode (.jpg format).In Picture mode , you can activate Snapshot mode so only a single picture is saved when an event occurs.Alternatively, you can define the duration or number of pictures to be recorded before and after a trigger signal.You can activate Cyclic event storage to define a maximum number of events.Finally, you can enable FTP upload, which activates the second tab FTP configuration .4 INSTALLATION14O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICK Subject to change without noticeINSTALLATION 4Figure 12: Configuration, 24.3.1.5EventsThis page lists all recorded events, which you can download as a .zip file or delete.You can also download the log file of the app.At the top of the page, you can trigger an event directly by clicking the Trigger button(REST API).8027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App15Subject to change without notice4 INSTALLATION16O N L I N E H E L P | EventCam App8027026/2021-09-07 | SICKSubject to change without noticeFURTHER REMARKS 5 5Further remarks5.1Parallel AppsIf you run two apps in parallel on your hardware, you need to implement the Imageforwarder interface in your Key App in order to provide images to the EventCam App.Further instruction can be found in the SICK SupportPortal under “EventCam App”. 5.2EventCam App on Industrial PCs (IPC)If you install the EventCam App on your IPC, you have to extract the downloaded .zipfile.Please select only the EventCam App during the installation process.5.3LicensesSICK uses open-source software. This software is licensed by the rights holders usingthe following licenses among others: the free licenses GNU General Public License(GPL Version2, GPL Version3) and GNU Lesser General Public License (LGPL), the MITlicense, zLib license, and the licenses derived from the BSD license.This program is provided for general use, but WITHOUT ANY WARRANTY OF ANY KIND.This warranty disclaimer also extends to the implicit assurance of marketability orsuitability of the program for a particular purpose.More details can be found in the GNU General Public License. For complete licensetexts, see /licensetexts. Printed copies of the license texts are alsoavailable on request.8027026/2021-09-07 | SICK O N L I N E H E L P | EventCam App17 Subject to change without noticeDetailed addresses and further locations at AustraliaPhone +61 (3) 9457 0600 1800 33 48 02 – tollfree E-Mail **************.au AustriaPhone +43 (0) 2236 62288-0 ********************Belgium/LuxembourgPhone +32 (0) 2 466 55 66 ******************BrazilPhone +55 11 3215-4900 ************************.br CanadaPhone +1 905.771.1444 ************************Czech RepublicPhone +420 234 719 500 ******************ChilePhone +56 (2) 2274 7430 E-Mail **************ChinaPhone +86 20 2882 3600 E-Mail *******************.cn DenmarkPhone +45 45 82 64 00 ******************FinlandPhone +358-9-25 15 800 ******************FrancePhone +33 1 64 62 35 00 ******************GermanyPhone +49 (0) 2 11 53 010 ******************GreecePhone +30 210 6825100 E-Mail ***************.gr Hong KongPhone +852 2153 6300 E-Mail ************.hkHungaryPhone +36 1 371 2680 *************************IndiaPhone +91-22-6119 8900 *************************IsraelPhone +972 97110 11***************************ItalyPhone +39 02 27 43 41 ******************JapanPhone +81 3 5309 2112 *********************MalaysiaPhone +603-8080 7425 *************************MexicoPhone +52 (472) 748 9451 *********************NetherlandsPhone +31 (0) 30 229 25 44 ******************New ZealandPhone +64 9 415 0459 0800 222 278 – tollfree E-Mail *************.nz NorwayPhone +47 67 81 50 00 ******************PolandPhone +48 22 539 41 00 ******************RomaniaPhone +40 356-17 11 20 E-Mail **************RussiaPhone +7 495 283 09 90 ******************SingaporePhone +65 6744 3732 ************************SlovakiaPhone +421 482 901 201 *********************SloveniaPhone +386 591 78849 ********************South AfricaPhone +27 10 060 0550****************************.za South KoreaPhone +82 2 786 6321/4 ************************SpainPhone +34 93 480 31 00 ******************SwedenPhone +46 10 110 10 00 ******************SwitzerlandPhone +41 41 619 29 39 *********************TaiwanPhone +886-2-2375-6288 ********************.tw ThailandPhone +66 2 645 0009 ************************TurkeyPhone +90 (216) 528 50 00 *******************.tr United Arab EmiratesPhone +971 (0) 4 88 65 878 *********************United KingdomPhone +44 (0)17278 31121 ******************.uk USAPhone +1 800.325.7425 *******************VietnamPhone +65 6744 3732 ************************SICK AG | Waldkirch | Germany | 8027026/2021-09-07/e n。
LV教学版

LabVIEW虚拟仪器LabVIEW概述虚拟仪器(VI)的概念使用LabVIEW开发平台编制的程序称为虚拟仪器程序,简称为VI。
VI包括三个部分:程序前面板、框图程序和图标/连接器。
程序前面板用于设臵输入数值和观察输出量,用于模拟真实仪表的前面板。
在程序前面板上,输入量被称为控制(Controls),输出量被称为显示(Indicators)。
控制和显示是以各种图标形式出现在前面板上,如旋钮、开关、按钮、图表、图形等,这使这得前面板直观易懂。
下面是一个温度计程序(Thermometer VI)的前面板。
每一个程序前面板都对应着一段框图程序。
框图程序用LabVIEW图形编程语言编写,可以把它理解成传统程序的源代码。
框图程序由端口、节点、图框和连线构成。
其中端口被用来同程序前面板的控制和显示传递数据,节点被用来实现函数和功能调用,图框被用来实现结构化程序控制命令,而连线代表程序执行过程中的数据流,定义了框图内的数据流动方向。
上述温度计程序(Thermometer VI)的框图程序如下:图标/连接器是子VI被其它VI调用的接口。
图标是子VI在其他程序框图中被调用的节点表现形式;而连接器则表示节点数据的输入/输出口,就象函数的参数。
用户必须指定连接器端口与前面板的控制和显示一一对应。
下面图示为温度计程序(Thermometer VI)的图标和连接器。
连接器一般情况下隐含不显示,除非用户选择打开观察它。
LabVIEW的强大功能归因于它的层次化结构,用户可以把创建的VI程序当作子程序调用,以创建更复杂的程序,而这种调用的层次是没有限制的。
举一个例子,我们把前面创建的温度计程序(Thermometer VI)作为一个子程序用在当前新建程序里,当前程序的前面板如下图所示,先前的温度计子程序用于采集数据,而当前的程序用于显示温度曲线,并在前面板上设定测量次数和每次测量间隔的延时。
当前程序的框图如下图所示,它把温度计子程序放臵在一个FOR循环里,每次循环过程采集一次测量结果,当循环执行了设定的次数后,程序把采集的数据送到前面板的图表上显示。
ViCarrealTime软件资料Cosimulation

上述功能函数提供了友好的接口方便用户进行优化设计
函数列表,函数使用范例等内容可以在VI-CarRealTime帮助文档Matlab API Toolkit 这部分找到。
案例说明:半主动主动悬架,用于改善悬架的平顺性 软件环境: Matlab 2014b + Vi-CarRealTime 17
案例1 半主动悬架 天棚控制 希望悬架尽可能产生与簧载质量垂向速度相反的力
(器定义
案例1 半主动悬架
定义仿真工况文件
VI-CarRealTime Training 联合仿真
Matlab接口
VI-CarRealTime 允许用户通过Matlab界面与VI-CarRealTime进行交互。
这里有两种交互方式: VI-CarRealTIme 与Simulink 联合仿真 用过Maltab API函数库与VI-CarRealTime模型交互
单击运行按钮在工作目录下生成想xml仿真 文件
案例1 半主动悬架 搭建仿真模型
理想天棚控制模型
案例1 半主动悬架 搭建仿真模型
被动减振器模型
案例1 半主动悬架 信号定义
案例1 半主动悬架 信号定义
案例1 半主动悬架 半主动减振器的特性
只能耗散能量不能主动提供能量
减振器的阻尼在正常阻尼的2倍到0之间变换,编写阻尼力显 示函数,保证阻尼器只耗散能量,不提供能量
案例1 半主动悬架 搭建仿真模型
考虑实际减振器特性的半主动悬架
Vi-CarrealTime软件资料introduction

VI-CarRealTime
提供从概念到实现的完整建模解决方案
ADAMS/Car
车辆动力学,操稳 平顺,经济性等 性能评价
K&C 优化与DOE
软件在环 预定义数据库 驾驶模拟器与 交通流仿真
硬件在环
Hale Waihona Puke VI-CarRealTime
The "ecosystem"
车辆操稳与平顺 SIL, HIL, DIL DOE, 优化
Saginomiya Seisakusho 工程设计 硬件在环 驾驶模拟器 SimCoVR 视景生成
Multimatic 车辆试验 工程设计 驾驶模拟器
National Instruments 硬件在环 CarSimRT + LabviewRT
Vires 交通场景建模 主动安全 MIRA 工程设计 试验
Courtesy of Centro Ricerche FIAT
CoG Vert. Accel. [g]
Hole
VI-CarRealTime
模型验证试验数据对比
Courtesy of Multimatic Technical Centre
Vi-grad 界面
Vi-grad 界面
Vi-grad 界面
VI-grade用户案例
xpc
硬件----实车部件 环境-----1.传感器 数据采集卡 PCI-6251 xpc自带驱动 PCI-1723 自编驱动 作动器------电机 / 液压伺服 DA 难点:闭环控制(前馈+反馈), PI控制
PIL 处理器在环
硬件----控制器,电路 环境-----1.传感器 数据采集卡 PCI-6251 xpc自带驱动 PCI-1723 自编驱动 作动器------开关,按钮 DA 难点:闭环控制(前馈+反 馈), PI控制
LabVIEW Real-Time模块入门指南
LabVIEW Real-Time模块™入门指南本文档通过一系列练习介绍如何开发实时项目和VI,包括搭建RT终端,创建、调试和部署实时应用程序。
除了练习之外,本文档还提供创建实时应用程序时所需的LabVIEW帮助和其它Real-Time模块文档的相关参考信息。
目录安装和配置Real-Time模块 (2)安装Real-Time模块 (2)配置RT终端 (2)安装RT终端软件 (4)安装多CPU支持 (4)查看LabVIEW文档 (5)LabVIEW帮助 (5)LabVIEW Real-Time模块发行和升级说明 (5)LabVIEW Real-Time模块自述文件 (6)创建实时项目和应用程序 (6)使用Real-Time Project Wizard创建项目 (6)为应用程序选择RT终端和主机配置 (8)添加RT终端至项目 (10)在项目浏览器窗口中查看项目和应用程序 (10)配置RT终端的属性 (13)部署和运行RT终端上的VI (14)生成独立的实时应用程序 (14)创建实时程序生成规范 (15)编辑实时程序生成规范 (16)生成和运行独立的实时应用程序 (16)监测RT终端资源和错误 (17)监测RT终端资源 (17)查看RT终端错误 (17)调试RT终端VI和独立应用程序 (18)调试RT终端VI (18)调试独立的实时应用程序 (18)使用Real-Time Execution Trace工具包 (19)总结 (19)安装Real-Time模块和配置RT终端 (19)使用Real-Time Project Wizard创建RT项目 (19)使用项目浏览器窗口管理和配置项目 (20)LabVIEW Real-Time 模块入门指南/china使用LabVIEW 应用程序生成器创建独立实时应用程序 (20)使用NI 分布式系统管理器管理RT 终端资源 (20)使用RT 终端错误对话框查看RT 终端的错误记录 (20)调试RT 终端VI 和独立应用程序 (21)参考资料 (21)Real-Time 模块基本概念.................................................................................21Real-Time 模块范例.. (21)安装和配置Real-Time 模块必须将Real-Time 模块安装在进行开发的计算机上,也就是主机上,并在RT 终端上配置和安装软件。
LabVIEW Real-Time 模块 2012 版发行和升级说明书

发行和升级说明LabVIEW Real-Time 模块2012版本文档介绍LabVIEW Real-Time 模块2012版的系统要求、安装须知、新功能概述,以及升级和兼容性问题。
关于帮助用户熟悉Real-Time 模块的练习,见LabVIEW Real-Time 模块入门指南。
提示关于使用LabVIEW Real-Time 模块设计、开发和部署应用程序的编程建议,请参考LabVIEW 帮助中的 Real-Time 模块最佳实践一章。
在LabVIEW 帮助的目录选项卡中选择Real-Time 模块»Real-Time 模块最佳实践,即可查看相关内容。
目录系统要求............................................................................................................................2安装Real-Time 模块2012................................................................................................2激活Real-Time 模块.........................................................................................................3配置Real-Time 终端.........................................................................................................3Real-Time 模块2012版的新功能 (3)断开连接未使用的内嵌子VI 的性能改进................................................................3Real-Time Execution Trace 工具包. (3)激活Real-Time Execution Trace 工具包..................................................................4升级和兼容性问题.............................................................................................................4Real-Time 模块2012版的已知问题.................................................................................4参考资料. (5)相关文档和范例.........................................................................................................5NI 网站.......................................................................................................................5支持. (5)™2|/china |LabVIEW Real-Time 模块发行和升级说明系统要求下文介绍了运行LabVIEW Real-Time 模块的系统要求。
labview之时刻转自陈教师博客
作为一种面向工程应用的编程语言,LV提供了超级丰硕的时刻操作函数。
8.X后又提出了新的有关时刻的数据类型,时刻标识(TIMESTAMP)。
时刻标识初期通常翻译成“时刻戳”,事实上是一种改良型的数值控件,从时刻标识控件所在的控件选板就能够够初步判定出,时刻标识确实是特殊的数值控件。
一、时刻标识的内存映射要想真正了解一种数据类型,首要的问题是要弄清楚该数据类型在内存中或文件中是如何存储的。
咱们明白数值型控件能够选择控件所包括的数据类型,比如双精度浮点数、整型数、32位整型数、16位整型数等等。
时刻标识控件是不许诺选择它所包括的数据类型的,这说明时刻标识所包括的数据类型是固定的。
从帮忙文件中,咱们能够找到时刻标识在内存中的存储方式--映射。
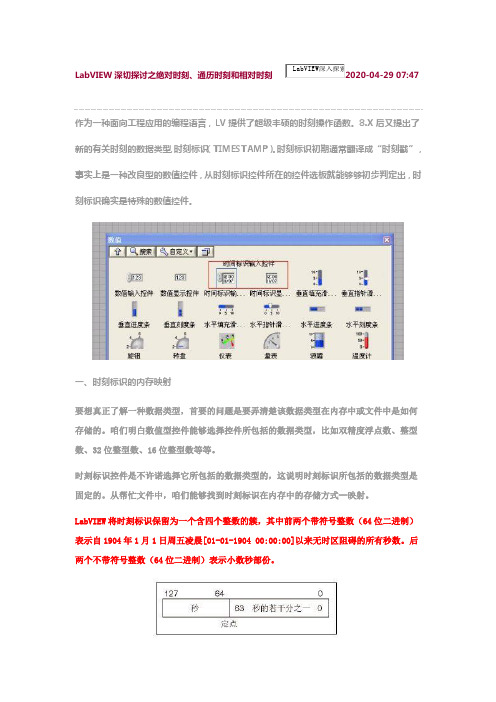
LabVIEW将时刻标识保留为一个含四个整数的簇,其中前两个带符号整数(64位二进制)表示自1904年1月1日周五凌晨[01-01-1904 00:00:00]以来无时区阻碍的所有秒数。
后两个不带符号整数(64位二进制)表示小数秒部份。
LV利用16个字节(128位)表示时刻信息,其中前8个字节(64位)由两个I32组成,表示从0时刻开始经历过的秒数。
后面8个字节为U64数据,表示秒的小数部份。
二、时刻标识与双精度数之间的彼此转换在时刻标识显现以前,常经常使用双精度数表示从0时刻经历过的秒数。
咱们明白双精度数所占的内存空间也是8个字节,与时刻标识相同。
可是时刻标识事实上是定点数,它的小数点位置是确信的,因此事实上双精度数表示时刻与时刻标识相较,不如时刻标识精准。
采纳数值转换函数就能够够实现时刻标识和双精度数之间的彼此转换,如以下图所示:三、强制转换时刻标识至数值既然咱们已经明白了时刻标识在内存中的存储方式,咱们自然就能够够通过强制转换函数分解出时刻标识的两个组成部份,秒和秒的小数部份。
因为时刻标识占有8个字节的内存空间,并分成前后各4个字节,因此能够创建一个簇或数组来表示它,下面的例子创建一个簇,包括3个元素。
微观交通仿真软件VISSIM使用介绍

第四章微观交通仿真软件VISSIM使用介绍第一节 VISSIM微观仿真软件介绍1.VISSIM仿真系统基本原理VISSIM是由德国PTV公司开发的微观交通流仿真系统。
该系统是一个离散的、随机的、以十分之一秒为时间步长的微观仿真软件。
车辆的纵向运动采用了德国Karlsruhe大学Wiedemann教授的“心理—生理跟车模型”;横向运动(车道变换)采用了基于规则(Rule-based)的算法。
不同驾驶员行为的模拟分为保守型和冒险型。
VISSIM软件系统内部由交通仿真器和信号状态发生器两大程序组成,它们之间通过接口来交换检测器的呼叫和信号状态。
"交通仿真器"是一个微观的交通流仿真模型,它包括跟车模型和车道变换模型。
"信号状态发生器"是一个信号控制软件,它以仿真步长为基础不断地从交通仿真器中获取检测信息,决定下一仿真时刻的信号状态并将这信息传送给交通仿真器。
图4.1 VISSIM中交通仿真器和信号状态发生器2.VISSIM仿真系统基本功能VISSIM可以作为许多交通问题分析的有力工具,它能够分析在诸如车道特性、交通组成、交通信号灯等约束条件下交通运行情况,不仅能对交通基础设施实时运行情况进行交通模拟,而且还可以以文件的形式输出各种交通评价参数,如行程时间、排队长度等。
因此,它是分析和评价交通基础设施建设中各种方案的交通适应性情况的重要工具。
以下是VISSIM的主要交通分析功能:1、固定式信号灯配时方法的开发、评价及优化。
2、能对各种类型的信号控制进行模拟,例如:定时控制方法、车辆感应信号控制方法、SCA TS和SCOOT控制系统中的信号控制等。
在VISSIM中,交通信号配时策略还可以通过外部信号状态发生器(V AP)来进行模拟,V AP允许用户设计自己定义的信号控制方法。
3、可用来分析慢速区域的交通流交织和合流情况。
4、可对各种设计方案进行对比分析,包括信号灯控制以及停车控制交叉口、环形交叉口以及立交等5、分析公共交通系统的复杂站台设施的通行能力和运行情况。
Real Time Automation 460ETCMM 产品说明说明书

460ETCMM-NNA1CONTACT US!1-800-249-1612 Real Time Automation GatewaysA Solution, A Philosophy, the RTA Way. We understand the long hours spent on a factory floor and thepressure to keep a line running and product flowing. That’s how Real Time Automation came to be. Youwant easy-to-use solutions where the hardest part is to open the box. You need customer support secondto none. If you get all that and a fun customer experience all the better. Thirty years later, our mission remains the same: To move your data where you need it, when you need it, and how you need it.Get Your Modbus RTU Slave Devices Connected Directly to the Data Table of Your Allen-Bradley PLCThe 460ETCMM moves data between up to 32 Modbus RTU slave devices and up to five Allen-Bradley PLCs. It saves legacy Modbus RTU devices from the scrap pile and allows you to use the many of Modbus RTU devices available in your AB PLC architectures.Best of all, the product is made in the USA, always in stock, and comes with 5-year warranty.How Do I Use the 460ETCMM-NNA1 in My Application?You allocate two blocks in your Allen-Bradley PLC. One area is write only tags or register blocks accepting data from your Modbus RTU devices. The other area is read only tags or register blocks to send data to your Modbus RTU devices. It’s really that simple. Need to modify your data as it passes from one protocol to the other? No problem. Each data mapping you apply can be modified with up to three mathematic functions. Add 4 to a value, multiply by 4 and divide by 10 with ease.Why Use Real Time Automation as a Gateway Supplier?While there are certainly other companies offering protocol gateways, there is no one who provides the level of support and service that you receive from RTA. When you call, a live person answers the phone. When you talk with sales, you will get honest answers and recommendations. When you get support, it is from an engineer who had a hand in the pro duct’s development, and support doesn’t require a ticket or 24-hour wait.FEATURES •Supports connection to five Allen-Bradley PLCs •Up to 150 tag or filearrays of data can be mapped in eachdirection•Fully configurable Modbus RTU master •Connects up to 32 Modbus RTU slaves•Effortless BrowserBased Configuration, no programming software is required•Simple data translationallows you tomanipulate data as it passes betweenprotocols• Guaranteed Stock •5-Year Hardware WarrantyReal Time Automation, Inc.************************** - 1-800-249-1612Made in theU.S.A.Always InStockReady toShipExpertSupportEthernet Tag Client PLC SupportControlLogix, CompactLogix, FlexLogix, MicroLogix, SLCs and PLC5Es Maximum Number of PLCs Supported5 Maximum Number of Input/Output Tags or Files per PLC150Maximum Number of Bytes per PLC Tag 400Array SupportYes, for all data types except stringsSupported Data Types Usint, Sint, Uint, Int, Udint, Dint, Real, String, Bit Array 16, Bit Array 32, Bool, and Long Modbus RTU Master Operation ModeModbus RTU Master Function Codes Supported 1,2,3,4,5,6, 15 & 16SwappingByte and Word Swapping Maximum Modbus RTU Slave Devices32Number Read/Write Scan Lines per RTU Slave Device200 Total - 100 reads & 100 writes Scan Line SupportUp to 125 Registers or 512 Coils INCLUDED WITH GATEWAY 3’ power cable with flying leads5-year hardware warrantyIPSetup software – automatically locates RTA gateway on the networkUnlimited firmware feature upgrades for lifeCAT5 crossover cable for direct connection to PC during programming Complete, unlimited access to our industry leading support staff ManualELECTRICAL / ENVIRONMENTALDC Input Voltage 12-24 VDC .Maximum Baud Rate 115K baud Operating Temperature -40 C to 85 C Certification RoHS-Compliant, UL, CUL, CE Approvals ENCLOSURE / HARDWARE Size 3.88" x 2.57" x 1.06" Weight 5.5 oz Enclosure Type Anodized Aluminum Mounting Din rail or panel mount LEDs Power LED & 2 general purpose LEDs on side GATEWAY FEATURES & FUNCTIONSAlarming Set <, <=, >, >=, ==, !=, and change-of-state ruleson any data moving through the gateway. If alarmrule is triggered an email notification can be sent. Gateway SecurityYou can configure up to 9 different users access todiagnostic and configuration screens. Translation TableAllows for data manipulation during protocol translation. Scaling and other data format changes can occur in the gateway.Status and CountersProtocol specific status, counters, and error messages are accessible within the gateway’s diagnostics page. They can also be delivered to a connected device.NOT EXACTLY WHAT YOU WERE LOOKING FOR? Real Time Automation offers a full line of gateway products. Give us a call at 1-800-249-1612. Or, check out a listing at/products . We also offercustomizations for unique applications.Diagnostic Logging PageAllows users to see and log start up sequences, protocol specific messages & error messages.CATALOG # DESCRIPTION460ETCMM-NNA1Connects up to five Allen-Bradley PLCs with as many as 32 Modbus RTU slaves。
vensim软件案例

1私车保有量-年需求量+私车保有量
2私车保有量+年报废量-私车保有量
3私车保有量+城市汽车总量+环保压力-增长率+年需求量+私车保有量
4私车保有量+城市汽车总量-车均道路面积-地面交通压力-增长率+年需求量+私车保有量
我们在明确因果关系、反馈回路的概念和特征之后,针对本文研究内容进行因果关系分析。
上文已经详细分析了影响私家车需求的因素,概括起来分别为:城市道路建设、交通管理水平、停车场建设、公共交通、城市布局、购车费用、使用费用、购车税费、居民收入、地方性消费政策、消费信贷、居民消费观念以及环保政策。为了简化模型,方便模型进行仿真研究,我们对这些影响因素进行调整以适合模型研究的需要。我们在研究中将不考虑城市布局和消费信贷等因素;将由于停车场建设不足所引发的车位供需矛盾引起停车费高涨调整为使用费用;购车税费和购车费用统一为私车价格;私牌拍的地方性消费政策量化为上牌费用;环保政策以及由于城市机动车保有量增长所带来的交通压力统一为政策因素。
(21)(21)A牌照供需比=牌照投放量/年增长量
(22)(22)L牌照投放量= INTEG (随机因子*投放增长率*牌照投放量,牌照投放量初始值)
(23)(23)N牌照投放量初始值= 15900
(24)(24)A投放增长率=交通因素-0.4
(25)(25)A随机因子= WITH LOOKUP (Time,
系统动力学流图是系统动力学的基本变量和表示符号的有机组合。根据上海市私家车发展系统内部各因素之间的关系设计系统流图,其目的主要在于反映系统各因果关系中所没能反映出来的不同变量的特性和特点,使系统内部的作用机制更加清晰明了,然后通过流图中关系的进一步量化,实现上海市私家车发展的政策仿真目的。
LabVIEW数据采集设备的定时与触发

目录一、硬件定时和软件定时的比较 (1)1.1 时钟 (1)1.2采样定时类型 (6)1.2.1采样时钟 (7)1.2.2握手 (8)1.3硬件定时单点采样模式 (10)1.4多路复用采样和同步采样 (10)1.5设置和保持时间 (11)1.6同步模拟输出按需定时 (11)1.7定时响应模式 (11)二、触发 (12)2.1前移触发 (12)2.2准备开始触发 (12)2.3到期触发 (12)2.4握手触发 (12)2.5暂停触发 (13)2.6参考触发 (13)2.7开始触发 (13)2.8触发类型 (13)2.8.1模拟边沿触发 (13)2.8.2模拟电平触发 (14)2.8.3模拟窗触发 (15)2.8.4数字边沿触发 (16)2.8.5数字电平触发 (16)2.8.6数字模式触发 (16)2.8.7软件触发 (17)三、同步 (18)3.1同步的类型, 锁步和握手 (18)3.2主设备和伺服设备 (18)3.3错误源 (19)3.3.1抖动 (19)3.3.2稳定性 (19)3.3.3精度 (19)3.3.4偏度 (20)3.4同步的方法 (20)3.4.1开始触发同步 (20)3.4.2采样时钟同步 (20)3.4.3参考时钟同步 (21)3.4.4主时基同步 (22)3.4.5采样时钟时基同步 (22)3.4.6混合时钟同步 (23)3.5计数器同步 (23)3.6触发延迟校正 (24)3.7与同步相关的概念 (24)3.7.1子系统 (24)3.7.2定时引擎 (24)3.7.3事件 (25)3.7.4导出信号动作 (26)3.7.5软件事件 (27)定时与触发一、硬件定时和软件定时的比较软件定时或硬件定时用于控制信号生成的时间。
硬件定时,例如,设备上的时钟(数字信号),控制信号生成的速率。
软件定时就是由操作系统和软件来控制采样生成,而不是由测量设备来控制。
硬件时钟运行远比软件快。
基于LabVIEW和myRIO的遥控跑车加速度检测系统

基于LabVIEW和myRIO的遥控跑车加速度检测系统纪敏;高锐;沈嵘枫;谢诗妍;李显阳;范佐恒;罗宇姝【摘要】针对工程索道的遥控跑车加速度检测的要求,通过综合图形化编程的LabVIEW与嵌入式的NI myRIO技术,设计完成基于LabVIEW和NI myRIO的具有智能和人工操作两种检测模式的系统.该系统实现了数据的输入输出、加速度检测、数据分析和处理等功能.对系统三轴加速度进行试验和结果分析,作为工程索道平稳运行作业的一个指标,有助于检测索道是否平稳安全运行.【期刊名称】《安徽工程大学学报》【年(卷),期】2019(034)001【总页数】8页(P51-58)【关键词】三轴加速度;LabVIEW;NI myRIO;遥控跑车【作者】纪敏;高锐;沈嵘枫;谢诗妍;李显阳;范佐恒;罗宇姝【作者单位】福建农林大学,交通与土木工程学院,福建福州 350002;福建省林业科学研究院,福建福州 350002;福建农林大学,交通与土木工程学院,福建福州350002;福建农林大学,交通与土木工程学院,福建福州 350002;福建农林大学,交通与土木工程学院,福建福州 350002;福建农林大学,交通与土木工程学院,福建福州350002;福建农林大学,交通与土木工程学院,福建福州 350002【正文语种】中文【中图分类】TH85随着科学技术的发展,林业索道运输工程设计越来越趋向智能化。
索道运输在已有研究的基础上进行优化,成效显著。
林业索道的运载工具遥控跑车是国内外森林工程界公认的高性能全自动跑车,它具有无需依靠制动器即可在索道沿线任意点起落吊钩集运材的功能[1]。
遥控跑车具有的主要特点是通过一个无线电遥控进行远程控制,由液压传动操纵的握索机构控制跑车停留点、落钩时机来进行集运材生产作业;适用于长距离多跨单线多索闭合往复式索道;淘汰了电话、旗语等方式,采用无线电遥控直接指挥绞盘机操作[2]。
遥控跑车改善了山场作业工人的劳动条件,提高生产效率、确保生产安全;实现林业索道生产集、运、归、装作业[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Events
Course Events: Press Maneuvers
Initial Velocity 初始速度 Initial Gear 初始档位 Refinements
遗传算法的代数
Type 仿真工况
• DLC (Double Line Change) 双移线 • DLC-CR (Double Line Change Consumer Report) 有报告的双移线 • Obstacle Avoidance 紧急避障 • Slalom 蛇形穿桩
Open Loop Steering event: Impulse Steer(脉冲转向)
The maneuver consists in a impulse applied to the steering system. Parameters: Impulse Duration Initial Steer Impulse Amplitude
Events
VIDriver Events
Cornering:
Braking In Turn Constant Radius Cornering
Course Events:
Max Performance Path Compensation Press MPath Compensation
Path Compensation 用于调整实际的行驶轨迹,使得车辆相对于目标轨迹偏移最小。 这一过程使用的是VI-Driver驾驶员模型。
仿真使用的vdf文件,这个vdf文件必须包含指定一个drd文件,这个drd文件必须包 括道路轨迹与速度序列。
File Driven Open Loop Steering:
Impulse Steer Step Steer Swept Steer Sine Steer
Fishhook J Turn Sine With Dwell
Stability:
Straight Line:
Events
Course Events: Max Performance
MaxPerformance工况用于确定在指定的运行轨迹下,车辆最大的通过速度。
Max Performance 会在首先使用静态(稳态)求解器 VI-SpeedGen对车辆进行静态 求解,Max Performance会计算出一个可行的速度与轨迹规划,然后用动态求解器进 行验证。
Impulse Duration Initial Steer Impulse Amplitude The maneuver consists in sweeping with the steering a range of frequency for a certain steering amplitude. Parameters: Sweep Amplitude Initial Frequency Final Frequency Frequency Rate Sweep Phase
Events
Open Loop Steering event: Impulse Steer Open Loop Steering event: 脉冲转向 Sweep Steer 扫频转向
The maneuver consists in a impulse applied to the steering system. Parameters:
Vehicle Size 车辆尺寸
Check Use Body Chassis Graphic box to automatically compute vehicle size from the graphic shell. Otherwise set the following parameters: • Width 车宽 • CG To Front Distance 前轴距 • CG To Rear Distance 后轴距
如果这个复选框被选中,仿真事件将选用vdf文件中驾驶员模型参数,而不是
Events
Course Events: Press Maneuvers
使用VI-Driver模型寻找通过通过当前轨迹的最大速度是多少。 软件会创建一个参考传动系,使得车辆达到所需的动力性能 标 桩 被 被 放 置 在 行 驶 轨 迹 两 边 , 软 件 使 用 遗 传 算 法 来 寻 找 最 优 轨 迹 , Press Maneuvers 是以速度恒定为目标来进行寻优的 每一次迭代之后, cone interference 用于检查车辆当前的轨迹是否可行。 当所有设定的轨迹全部仿真一遍之后,车辆的速度 将会提升,然后,在仿真一遍,直到找到最高车速 Press Maneuvers 会在找到了最快速度通过的轨 迹后停止,通过的过程中,车辆不能撞到标桩上。
VI-CarRealTime Training 仿真工况
© VI-grade. All rights reserved. 2007-2013
Events
在 VI-CarRealTime 中的仿真工况是按照对象的方式定 义的,一个对象定义一系列同类型的仿真工况
Available events: VI-Driver VI-Safety VI-SpeedGen VI-TestRig Xternal ADAMS Car
Events
Stability: Fishhook Test that stresses the rollover tendency of vehicles by inducing it with a typical emergency maneuver. Maneuver steps:
Initial steering input: The peak value is the steering angle which gives a lateral acceleration of 0.3g. Maintain peak value of steering angle for 0.25 seconds or maintain peak value of steering angle until the roll rate falls below 1.5 deg/sec depending on whether Fixed Time or Roll Rate Feedback field is selected in Steering Actuation Method text box. Steering in the opposite direction until the opposite value of peak steering angle is reached. Maintain the latter peak value of steering angle for 3 seconds. Steering back until the steering angle brings back to 0 degrees.
路径文件(drd文件)
车辆必须沿着该轨迹行驶.
初始速度
当Flying lap激活时无效
Initial Gear Flying Lap
当Flying lap激活时无效 . 结束时的速度与开始速度一致
更新 Ride Height Map
Used by the static solver to compute the dependency of Ride Height (and Aero Forces) on vehicle velocity, since the vehicle model in the static solver has no suspensions.
Events
Cornering event: Constant Radius Cornering(稳态回转) Turn Radius and Direction 半径与转动方向 Initial Velocity and Gear 初始速度与档位 Final Velocity 结束速度
Straight Line events: Straight Braking
Events
Cornering event: Braking In Turn Braking Deceleration 制动减速度 Turn Radius 转动半径 Initial Velocity and Gear 初始速度与档位
工况
Common event properties:
Road Settings Solver Settings Tire Limits
求解器设置 路面设置 Integration Time Setep Road Data File Output Time Step Road Graphics File Integrator Lap Sensor Path File Mode of Simulation
Open Loop Steering event: Step Steer
The maneuver consists in a step applied to the steering system. Parameters: Step Duration Initial Steer Final Steer
第一次仿真使用vdf文件
每进行一次仿真Vi-CarRealTime都会更新一次drd文件,保证下一次比本次轨迹完 整的更精确。
接下来一个新的vdf文件被建立出来,同时Vi-CarRealTime会适当更新速度时间历 程。当然路径按照上一步的drd文件指定。 用新生成的vdf文件进行仿真。
如果上一步确定的速度与轨迹规划无法满足收敛性要求,软件会重新用静态求解器规 划轨迹与速度,注意静态求解器重新规划仿真失败的轨迹附近的轨迹点与速度点。