STM32-内部温度传感器-串口显示-完整程序
单片机基于stm32的数字温度计设计

单片机基于stm32的数字温度计设计
数字温度计是一种用于测量环境温度的设备。
在这个问题中,我们将使用基于STM32的单片机来设计一个数字温度计。
为了设计这个温度计,我们需要以下组件和步骤:
1. STM32单片机:STM32是一种基于ARM架构的单片机,它具有强大的计算能力和丰富的外设接口,适用于各种应用。
2. 温度传感器:我们需要选择一种适合的温度传感器,常用的有数字式温度传感器,如DS18B20。
3. 连接电路:将温度传感器连接到STM32单片机。
这通常需要使用一些电子元件,如电阻、电容和连接线等来建立电路连接。
4. 编程:使用适合STM32单片机的编程语言,如C语言,来编写程序。
程序将读取温度传感器的数据,并将其转换为数字值。
5. 温度显示:将温度数据显示在合适的显示设备上,如LCD显示屏或七段数码管。
可以使用STM32单片机的GPIO口控制这些显示设备。
6. 数据处理:可以对温度数据进行进一步处理,如计算平均温度、设定警报阈值等。
以上是一个基本的数字温度计设计的流程。
具体的实现细节和代码编写可能需要根据具体的硬件和软件平台进行调整。
基于STM32单片机的温度控制系统设计

基于STM32单片机的温度控制系统设计一、本文概述本文旨在探讨基于STM32单片机的温度控制系统的设计。
我们将从系统需求分析、硬件设计、软件编程以及系统测试等多个方面进行全面而详细的介绍。
STM32单片机作为一款高性能、低功耗的微控制器,广泛应用于各类嵌入式系统中。
通过STM32单片机实现温度控制,不仅可以精确控制目标温度,而且能够实现系统的智能化和自动化。
本文将介绍如何通过STM32单片机,结合传感器、执行器等硬件设备,构建一套高效、稳定的温度控制系统,以满足不同应用场景的需求。
在本文中,我们将首先分析温度控制系统的基本需求,包括温度范围、精度、稳定性等关键指标。
随后,我们将详细介绍系统的硬件设计,包括STM32单片机的选型、传感器和执行器的选择、电路设计等。
在软件编程方面,我们将介绍如何使用STM32的开发环境进行程序编写,包括温度数据的采集、处理、显示以及控制策略的实现等。
我们将对系统进行测试,以验证其性能和稳定性。
通过本文的阐述,读者可以深入了解基于STM32单片机的温度控制系统的设计过程,掌握相关硬件和软件技术,为实际应用提供有力支持。
本文也为从事嵌入式系统设计和开发的工程师提供了一定的参考和借鉴。
二、系统总体设计基于STM32单片机的温度控制系统设计,主要围绕实现精确的温度监测与控制展开。
系统的总体设计目标是构建一个稳定、可靠且高效的环境温度控制平台,能够实时采集环境温度,并根据预设的温度阈值进行智能调节,以实现对环境温度的精确控制。
在系统总体设计中,我们采用了模块化设计的思想,将整个系统划分为多个功能模块,包括温度采集模块、控制算法模块、执行机构模块以及人机交互模块等。
这样的设计方式不仅提高了系统的可维护性和可扩展性,同时也便于后续的调试与优化。
温度采集模块是系统的感知层,负责实时采集环境温度数据。
我们选用高精度温度传感器作为采集元件,将其与STM32单片机相连,通过ADC(模数转换器)将模拟信号转换为数字信号,供后续处理使用。
单片机STM32实验报告

实验报告课程名称:单片微机原理与车载系统学生姓名蒋昭立班级电科1601学号***********指导教师易吉良成绩2018年12 月17 日实验1 GPIO实验1.1 实验目的1)熟悉MDK开发环境;2)掌握STM32单片机的GPIO使用方法。
1.2 实验设备1)一台装有Keil和串口调试软件的计算机;2)一套STM32F103开发板;3)STlink硬件仿真器。
1.3 基本实验内容1)熟悉MDK开发环境,参考《STM32F1开发指南(精英版)-寄存器版本_V1.0》第3章,安装MDK 并新建test工程,运行例程,在串口窗宽观察结果,并记录如下:从图片可以看出,例程运行成功,没有错误。
2)按键输入实验,《STM32F1开发指南(精英版)-寄存器版本_V1.0》第8章。
实现功能:3 个按钮(KEY_UP、KEY0和KEY1),来控制板上的2 个LED(DS0 和DS1)和蜂鸣器,其中KEY_UP 控制蜂鸣器,按一次叫,再按一次停;KEY1 控制DS1,按一次亮,再按一次灭;KEY0 则同时控制DS0 和DS1,按一次,他们的状态就翻转一次。
理解连续按概念及其实现代码。
参数mode 为0 的时候,KEY_Scan 函数将不支持连续按,扫描某个按键,该按键按下之后必须要松开,才能第二次触发,否则不会再响应这个按键,这样的好处就是可以防止按一次多次触发,而坏处就是在需要长按的时候比较不合适。
当mode 为1 的时候,KEY_Scan 函数将支持连续按,如果某个按键一直按下,则会一直返回这个按键的键值,这样可以方便的实现长按检测。
寄存器方法实现不支持连续按的关键代码,以及程序运行后的效果。
由程序可知,给KEY_Scan函数输入的值为0,为不支持连按模式。
寄存器方法实现支持连续按的关键代码,以及程序运行后的效果。
由程序可知,给KEY_Scan函数输入的值为1,为支持连按模式。
3)采用库函数方法实现按键输入实验,参考《STM32F1开发指南(精英版)-库函数版本_V1.0》第8章。
Stm32F407IG内部温度传感器测试(CORTEX-M4+ADC+DMA)

Stm32F407IG内部温度传感器测试(CORTEX-M4+ADC+DMA)刚才发了ADC的一般用法,得知stm32内部内置了一个温度传感器,于是趁热调试了一下内部温度传感器。
没有软件滤波,正如手册里所说的,该温度传感器起到一个检测温度变化的作用,如果你想要精确的温度测量,请你外置测温元件...呵呵,测试结果如图:代码如下:/************************************************************Copyright (C), 2012-2022, yin.FileName: main.cAuthor: 小枣年糕Date: 2012\05\01Description: ADC1 DMA tempersensor printfVersion: V3.0IDE: MDK 4.22aHardWare: stm32F407IG HSE = 25M PLL = 168MHistory: V1.0Function: 利用ADC读取芯片内部温度传感器的值***********************************************************/#include<stm32f4xx.h>#include<stdio.h>/*定义ADC1的数据寄存器地址,DMA功能要用到外设的数据地址*ADC1的数据地址为外设基地址+偏移地址,基地址在RM0090 Reference*manual(参考手册)的地址映射表里,为0x40012000,ADC_DR*偏移地址为0x4C,故实际地址为0x40012000+0x4C = 0x4001204C */#define ADC1_DR_Addr ((uint32_t)0x4001204C)__IO uint16_t ADCoverValue;__IO float Temper;void GPIO_Config(void);void ADC_Config(void);void USART_Config(void);void DMA_Config(void);void NVIC_Config(void);void Delay(uint32_t nCount);/* printf函数重定向*/int fputc(int ch, FILE *f);main(){/*在主函数main之前通过调用启动代码运行了SystemInit函数,而这个函数位于system_stm32f4xx.c”。
STM32F030读取温湿度传感器SHT20的C程序源码(经.

while(t--
{
__nop(; __nop(; __nop(; __nop(; __nop(;
__nop(; __nop(; __nop(; __nop(; __nop(;
__nop(; __nop(; __nop(; __nop(; __nop(;
__nop(; __nop(; __nop(; __nop(; __nop(;
#define HTU20_SCL GPIO_ReadInputDataBit(HTU20_SCL_PORT,HTU20_SCL_PIN #define HTU20_SDA GPIO_ReadInputDataBit(HTU20_SDA_PORT,HTU20_SDA_PIN
/**
* @brief Set SDA pin dircate as output
*/
void I2CInit(void
{
HTUInit(;
HTU20_SDA_OUT(;
HTU20_SCL_OUT(;
HTU20_SDA_1(;
I2CDelay(1;
HTU20_SCL_1(;
I2CDelay(1;
}
/**
* @brief IIC start signal
* @comment SCL、SDA同为高,SDA跳变成低之后,SCL跳变成低
================================================================*/
/**
* @brief A short delay for iic synchronization
* @param t us
* @retvalNone
*/
void I2CDelay (BYTE t
STM32开发板使用说明
STM32开发板使用说明1、开发板使用到的软件及安装说明在开始学习开发板之前需要安装的软件有:1、KEIL3.80A,2、PL-2303HX驱动,3、串口调试助手,4、下载器MCUISP。
这些软件在课件文件下面的软件文件里。
具体安装步骤如下:1.KEIL3.80A的安装,打开路径:课件\软件\KEIL3.80A\MDK3.80A安装手册,根据上面的步骤安装软件。
2.PL-2303HX驱动的安装,打开路径:课件\软件\PL-2303HX新版驱动,可根据使用电脑的操作系统来选择安装的软件,如选择安装XP驱动,可打开XP驱动,根据里面的安装说明来安装软件。
一般只要运行PL-2303 Driver Installer。
exe就可以了。
3.串口调试助手的安装,打开路径:课件\软件\串口调试助手,点击sscom33。
exe即可,也可以创建快捷方式在桌面。
4.下载器MCUISP的安装,打开路径:课件\软件\下载器MCUISP,点击mcuisp。
exe 即可,也可以创建快捷方式在桌面。
2、开发环境介绍及使用说明首先是我们之前安装的keil3.80a。
再点击Project->New uVision Project如下图所示:弹出create new project 对话框,新建一个文件夹TEST,然后把工程名字设为test。
点击保存。
弹出选择器件的对话框,因为我们的开发板使用的是STM32F103RBT6 ,所以在这里我们选择STMicroelectronics 下面的STM32F103RB( 如果使用的是其他系列的芯片,选择相应的型号就可以了)。
如下图所示:点击OK,MDK会弹出一个对话框,问你是否加载启动代码到当前工程下面,这里我们选择是。
启动代码是一段和硬件相关的汇编代码。
是必不可少的!在上面点击了是以后,MDK 就把启动代码STM32F10x。
s 加入到了我们的工程下面。
如下图所示:到这里,我们就可以开始编写自己的代码了。
stm32f103串口发送函数例程

stm32f103串口发送函数例程1.简介本文档旨在介绍如何使用s tm32f103单片机开发板进行串口数据发送。
通过详细的步骤和示例代码,帮助读者理解并掌握串口发送函数的使用方法。
2.准备工作在开始使用s tm32f103进行串口数据发送之前,需要进行一些准备工作。
以下是所需的材料和环境:-s tm32f103开发板-串口线-串口调试助手软件-电脑-开发环境(如K eil等)3.步骤3.1连接硬件首先,将st m32f103开发板与电脑通过串口线连接好。
确保连接的端口和引脚与程序中定义的一致。
3.2配置串口在开发环境中,找到串口配置文件,并进行相应的设置。
设置包括波特率、数据位、停止位和校验等参数,根据需求设置。
3.3初始化串口在主函数中,使用相应的代码初始化串口。
初始化包括开启时钟、配置G PI O引脚和配置串口寄存器等操作。
3.4编写发送函数编写串口发送函数,用于向外部设备发送数据。
发送函数应包含以下步骤:-判断是否可以发送数据(如发送缓冲区是否为空)-将数据写入发送缓冲区-等待数据发送完成以下是一个简单的串口发送函数例程:v o id UA RT_S en dD ata(ui nt8_td at a){//判断发送缓冲区是否为空w h il e(!(US AR T1->S R&U SA RT_S R_TX E));//将数据写入发送缓冲区U S AR T1->DR=(da ta&0xF F);//等待数据发送完成w h il e(!(US AR T1->S R&U SA RT_S R_TC));}3.5调用发送函数在主函数中,调用编写的发送函数,向外部设备发送数据。
4.示例代码下面是完整的示例代码,供参考:#i nc lu de"s tm32f10x.h"v o id UA RT_I ni t(){//开启US AR T1时钟R C C->A PB2E NR|=RCC_AP B2EN R_US AR T1E N;//配置GP IO引脚R C C->A PB2E NR|=RCC_AP B2EN R_IO PA EN;G P IO A->C RH&=~(GPI O_C RH_C NF9|GP IO_C RH_M OD E9);//清除原有配置G P IO A->C RH|=GP IO_C RH_C NF9_1|GP IO_C RH_M OD E9_1;//设置为复用推挽输出//配置US AR T1寄存器U S AR T1->BR R=0x1D4C;//波特率设置为9600U S AR T1->CR1|=U SAR T_C R1_T E;//使能发送//使能US AR T1U S AR T1->CR1|=U SAR T_C R1_U E;}v o id UA RT_S en dD ata(ui nt8_td at a){//判断发送缓冲区是否为空w h il e(!(US AR T1->S R&U SA RT_S R_TX E));//将数据写入发送缓冲区U S AR T1->DR=(da ta&0xF F);//等待数据发送完成w h il e(!(US AR T1->S R&U SA RT_S R_TC));}i n tm ai n(){U A RT_I ni t();w h il e(1){U A RT_S en dD at a('H');U A RT_S en dD at a('e');U A RT_S en dD at a('l');U A RT_S en dD at a('l');U A RT_S en dD at a('o');}}5.运行与调试将编写的代码烧录到s tm32f103开发板上,然后接上电源。
单片机STM32实验报告

实验报告课程名称:单片微机原理与车载系统学生姓名蒋昭立班级电科1601学号16401700119指导教师易吉良成绩2018年12 月17 日实验1 GPIO实验1.1 实验目的1)熟悉MDK开发环境;2)掌握STM32单片机的GPIO使用方法。
1.2 实验设备1)一台装有Keil和串口调试软件的计算机;2)一套STM32F103开发板;3)STlink硬件仿真器。
1.3 基本实验内容1)熟悉MDK开发环境,参考《STM32F1开发指南(精英版)-寄存器版本_V1.0》第3章,安装MDK 并新建test工程,运行例程,在串口窗宽观察结果,并记录如下:从图片可以看出,例程运行成功,没有错误。
2)按键输入实验,《STM32F1开发指南(精英版)-寄存器版本_V1.0》第8章。
实现功能:3 个按钮(KEY_UP、KEY0和KEY1),来控制板上的2 个LED(DS0 和DS1)和蜂鸣器,其中KEY_UP 控制蜂鸣器,按一次叫,再按一次停;KEY1 控制DS1,按一次亮,再按一次灭;KEY0 则同时控制DS0 和DS1,按一次,他们的状态就翻转一次。
理解连续按概念及其实现代码。
参数mode 为0 的时候,KEY_Scan 函数将不支持连续按,扫描某个按键,该按键按下之后必须要松开,才能第二次触发,否则不会再响应这个按键,这样的好处就是可以防止按一次多次触发,而坏处就是在需要长按的时候比较不合适。
当mode 为1 的时候,KEY_Scan 函数将支持连续按,如果某个按键一直按下,则会一直返回这个按键的键值,这样可以方便的实现长按检测。
寄存器方法实现不支持连续按的关键代码,以及程序运行后的效果。
由程序可知,给KEY_Scan函数输入的值为0,为不支持连按模式。
寄存器方法实现支持连续按的关键代码,以及程序运行后的效果。
由程序可知,给KEY_Scan函数输入的值为1,为支持连按模式。
3)采用库函数方法实现按键输入实验,参考《STM32F1开发指南(精英版)-库函数版本_V1.0》第8章。
stm32 内部温度传感器
/*
DMA1
channel1
configuration
----------------------------------------------*/
DMA_DeInit(DMA1_Channel1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address;
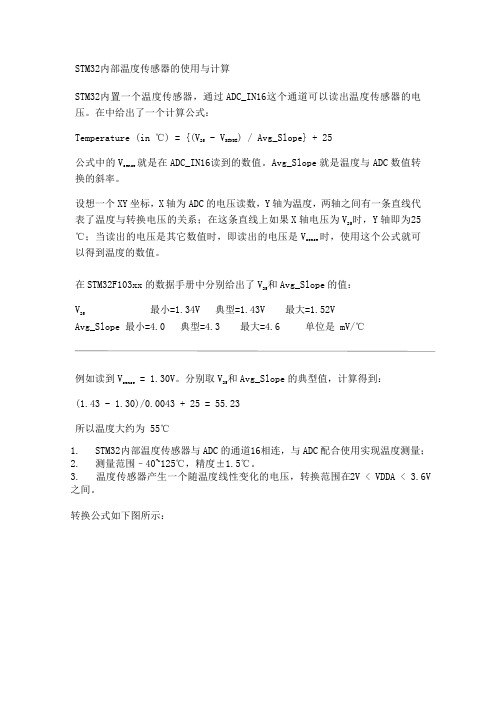
V25
最小=1.34V 典型=1.43V 最大=1.52V
Avg_Slope 最小=4.0 典型=4.3 最大=4.6 单位是 mV/℃
例如读到 Vsense = 1.30V。分别取 V25和 Avg_Slope 的典型值,计算得到:
(1.43 - 1.30)/0.0043 + 25 = 55.23
* Input
: None
* Output
: None
* Return
: None
************************************************************************
*******/
void ADC_Configuration(void)
{
设想一个 XY 坐标,X 轴为 ADC 的电压读数,Y 轴为温度,两轴之间有一条直线代 表了温度与转换电压的关系;在这条直线上如果 X 轴电压为 V25时,Y 轴即为25 ℃;当读出的电压是其它数值时,即读出的电压是 Vsense 时,使用这个公式就可 以得到温度的数值。
在 STM32F103xx 的数据手册中分别给出了 V25和 Avg_Slope 的值:
/* Enable ADC1 */ ADC_Cmd(ADC1, ENABLE); /* Enable ADC1 reset calibaration register */ ADC_ResetCalibration(ADC1); /* Check the end of ADC1 reset calibration register */ while(ADC_GetResetCalibrationStatus(ADC1)); /* Start ADC1 calibaration */
百为STM32开发板用户手册
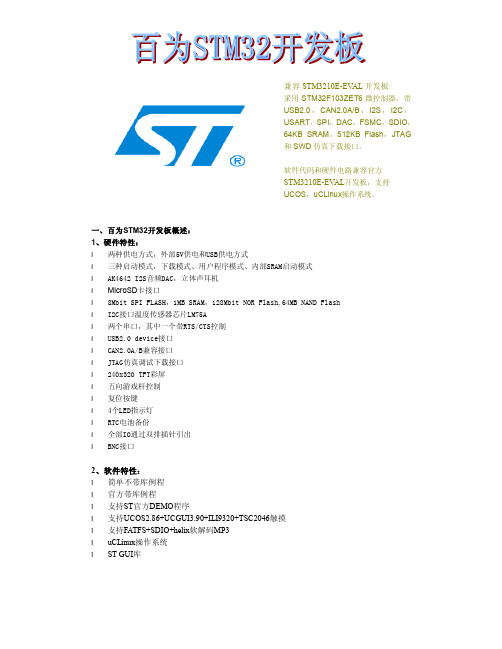
兼容STM3210E-EV AL开发板采用STM32F103ZET6微控制器,带USB2.0,CAN2.0A/B,I2S,I2C,USART,SPI,DAC,FSMC,SDIO,64KB SRAM,512KB Flash,JTAG和SWD仿真下载接口。
软件代码和硬件电路兼容官方STM3210E-EV AL开发板,支持UCOS,uCLinux操作系统。
一、百为STM32开发板概述:1、硬件特性:l 两种供电方式,外部5V供电和USB供电方式l 三种启动模式,下载模式、用户程序模式、内部SRAM启动模式l AK4642 I2S音频DAC,立体声耳机l MicroSD卡接口l 8Mbit SPI FLASH,1MB SRAM,128Mbit NOR Flash,64MB NAND Flashl I2C接口温度传感器芯片LM75Al 两个串口,其中一个带RTS/CTS控制l USB2.0 device接口l CAN2.0A/B兼容接口l JTAG仿真调试下载接口l 240x320 TFT彩屏l 五向游戏杆控制l 复位按键l 4个LED指示灯l RTC电池备份l 全部IO通过双排插针引出l BNC接口2、软件特性:l 简单不带库例程l 官方带库例程l 支持ST官方DEMO程序l 支持UCOS2.86+UCGUI3.90+ILI9320+TSC2046触摸l 支持FATFS+SDIO+helix软解码MP3l uCLinux操作系统l ST GUI库二、开发板硬件框图:硬件模块图:实物功能对照图:CONNETORSTM32F103ZET6SPI FLASHBOOT SELECTAK4642TF CARDAUDIO JACKADC INPUT开发板提供外部5V供电及USB供电两种方式,可通过JP13跳帽选择任意一种。
l 外部5V供电方式,JP13跳帽接PSUl USB供电方式,JP13跳帽接USB,默认USB供电方式l JP1连接1、2,VBAT接到备份电池l JP1连接2、3,VBAT接到3.3V2、启动方式l 从用户FLASH启动l 从系统存储器启动l 从内部SRAM启动开发板上有两种时钟源l X2,32KHz晶振作为RTC时钟源l X1,8MHz晶振作为MCU的时钟源,当使用内部RC震荡器作为时钟源时,可以将8MHz 晶振去掉4、复位方式STM32复位为低电平有效,开发板上有三种复位方式:l 上电复位l 通过开发板上的RESET按键复位l JTAG调试器输入复位信号5、音频AK4642音频芯片连接到STM32F103ZET6的I2S2接口,支持立体声耳机接口输出。
STM32外设使用要点

STM32外设使用要点1、时钟安全系统(CSS)时钟安全系统被激活后,时钟监控器将实时监控外部高速振荡器;如果HSE时钟发生故障,外部振荡器自动被关闭,产生时钟安全中断,该中断被连接到Cortex-M3的NMI的中断;同时CSS将内部RC振荡器切换为STM32的系统时钟源(对于STM32F103,时钟失效事件还将被送到高级定时器TIM1的刹车输入端,用以实现电机保护控制)。
操作流程:1)、启动时钟安全系统CSS: RCC_ClockSecuritySystemCmd(ENABLE); (NMI中断是不可屏蔽的!)2)外部振荡器失效时,产生NMI中断,对应的中断程序:void NMIException(void){if (RCC_GetITStatus(RCC_IT_CSS) != RESET){ // HSE、PLL已被禁止(但是PLL设置未变)…… // 客户添加相应的系统保护代码处// 下面为HSE恢复后的预设置代码RCC_HSEConfig(RCC_HSE_ON); // 使能HSERCC_ITConfig(RCC_IT_HSERDY, ENABLE); // 使能HSE就绪中断RCC_ITConfig(RCC_IT_PLLRDY, ENABLE); // 使能PLL就绪中断RCC_ClearITPendingBit(RCC_IT_CSS); // 清除时钟安全系统中断的挂起位// 至此,一旦HSE时钟恢复,将发生HSERDY中断,在RCC中断处理程序里,系统时钟可以设置到以前的状态}}3)、在RCC的中断处理程序中,再对HSE和PLL进行相应的处理。
注意:一旦CSS被激活,当HSE时钟出现故障时将产生CSS中断,同时自动产生 NMI。
NMI将被不断执行,直到CSS中断挂起位被清除。
因此,在NMI的处理程序中必须通过设置时钟中断寄存器(RCC_CIR)里的CSSC位来清除CSS中断。
2、SysTick工作原理Cortex-M3的内核中包含一个SysTick时钟。
stm32将内部温度传感器的值转为温度的方法

stm32将内部温度传感器的值转为温度的方法将STM32内部温度传感器的值转为温度简介在STM32微控制器内部集成了一个温度传感器,可以用来测量芯片的温度。
然而,这个传感器给出的是一个原始的ADC值,需要进行计算才能得到真实的温度值。
本文将介绍几种常见的方法,用于将STM32内部温度传感器的值转换为温度。
1. 直接采用处理器内部的温度传感器值转换公式步骤:1.读取温度传感器值:在STM32微控制器上,可以通过读取内部参考电压(Vref)和温度传感器的原始ADC值(ADC_value)来获取温度传感器值。
2.计算温度:将原始的ADC值通过一定的公式转换为温度值:Temperature = ((Vref - V_sense) / Avg_Slope) + 25。
其中,Avg_Slope是传感器的平均斜率,V_sense是传感器的电压值。
优点:•实现简单,只需要进行简单的计算即可得到温度值。
•精度较高,可以满足大多数应用场景的需求。
缺点:•依赖于传感器的平均斜率值,可能存在一定的误差。
•无法在实时应用中获得温度值,需要额外的计算和处理。
2. 使用查找表法进行温度转换步骤:1.创建温度查找表:首先,先使用外部传感器测量一系列温度值,并将这些温度值与相应的传感器原始ADC值建立对应关系,得到一张温度查找表。
2.读取温度传感器值:同样地,通过读取内部参考电压(Vref)和温度传感器的原始ADC值(ADC_value)来获取温度传感器值。
3.查找温度:根据传感器原始ADC值,在温度查找表中找到对应的温度值。
优点:•可以提高温度转换的精度和准确性。
•可以在实时应用中获得温度值,无需额外的计算和处理。
缺点:•需要额外的传感器测量和建立温度查找表的过程,增加了开发和测试的工作量。
•如果温度传感器的特性发生改变,需要重新生成温度查找表。
3. 使用温度传感器标定法进行温度转换步骤:1.进行温度传感器标定:使用外部精准度较高的温度传感器进行对比测量,记录传感器原始ADC值和实际温度值的对应关系。
STM32分别实现温湿度的采集和OLED显示屏显示数据

STM32分别实现温湿度的采集和OLED显示屏显示数据1.硬件准备首先,需要准备以下硬件:-STM32开发板(例如STM32F103C8T6)-温湿度传感器(例如DHT11)-OLED显示屏(例如SSD1306)2.连接电路将STM32开发板、温湿度传感器和OLED显示屏按照以下方式连接:-将STM32的VCC和GND引脚连接到电源正负极。
-将STM32的PB6引脚连接到温湿度传感器的数据引脚。
-将STM32的I2C引脚(PB6和PB7)连接到OLED显示屏的SDA和SCL引脚。
3.编写代码使用STM32CubeIDE或其他适合的开发环境创建一个新的工程,并编写以下代码:```c#include "stm32f1xx_hal.h"#include "dht11.h"#include "ssd1306.h"DHT11_Data_TypeDef DHT11_Data;extern I2C_HandleTypeDef hi2c1;void SystemClock_Config(void);static void MX_GPIO_Init(void);static void MX_I2C1_Init(void);int main(void)HAL_Init(;SystemClock_Config(;MX_GPIO_Init(;MX_I2C1_Init(;SSD1306_Init(;while (1)DHT11_ReadData(&DHT11_Data);char buffer[20];sprintf(buffer, "Temp: %dC", (int)DHT11_Data.Temperature); SSD1306_GotoXY(0, 0);SSD1306_Puts(buffer, &Font_7x10, SSD1306_WHITE);sprintf(buffer, "Humidity: %d%%", (int)DHT11_Data.Humidity); SSD1306_GotoXY(0, 20);SSD1306_Puts(buffer, &Font_7x10, SSD1306_WHITE);SSD1306_UpdateScreen(;HAL_Delay(2000);}void SystemClock_Config(void)RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)Error_Handler(;}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK,RCC_CLOCKTYPE_SYSCLKRCC_CLOCKTYPE_PCLK1,RCC_CLOCKTYPE_PCLK2RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct,FLASH_LATENCY_2) != HAL_OK)Error_Handler(;}static void MX_GPIO_Init(void)GPIO_InitTypeDef GPIO_InitStruct = {0};__HAL_RCC_GPIOB_CLK_ENABLE(;HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);GPIO_InitStruct.Pin = GPIO_PIN_6;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);__HAL_AFIO_REMAP_I2C1_ENABLE(;static void MX_I2C1_Init(void)hi2c1.Instance = I2C1;hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;hi2c1.Init.OwnAddress1 = 0;hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c1.Init.OwnAddress2 = 0;hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;if (HAL_I2C_Init(&hi2c1) != HAL_OK)Error_Handler(;}__HAL_I2C_ENABLE(&hi2c1);```4.添加DHT11库和SSD1306库5.编译和烧录编译代码并将生成的hex文件烧录到STM32开发板中。
stm32单片机读取温湿度的基本过程
stm32单片机读取温湿度的基本过程
在STM32单片机上读取温湿度值通常涉及以下基本步骤:
1.选择和配置传感器:首先,你需要选择一个合适的温湿度传感器。
常见的
选择包括SHT20、DHT11、AM2301等。
选择好传感器后,你需要将其连接到STM32的I/O口上,并配置I/O口的工作模式。
2.初始化传感器:在开始读取数据之前,需要初始化传感器。
这通常涉及发
送启动信号以启动传感器,并等待传感器响应。
3.读取传感器数据:初始化完成后,你可以从传感器读取数据。
这通常涉及
从I/O口读取一系列的字节,并按照传感器的数据格式解析这些字节以得到温度和湿度值。
4.处理数据:读取到的原始数据可能需要进一步处理,例如进行校准、转换
或滤波,才能得到更准确或更有用的信息。
5.存储或显示数据:处理完数据后,你可以将其存储在内部存储器或外部存
储器中,或者通过串口、LCD或其他显示方式显示出来。
6.循环读取:为了持续监控环境,你可能需要在程序中设置一个循环,定期
读取并处理温湿度数据。
具体的代码实现会因所选的传感器和STM32型号而有所不同。
你可以查找相关的硬件库或SDK来找到具体的实现示例和详细说明。
例如,如果你使用的是STM32 HAL库,那么可能需要查看相关的库文档或示例代码来了解如何正确地初始化和读取传感器数据。
常用的微控制器系列STM32串口奇校验原理及程序

常用的微控制器系列STM32串口奇校验原理及程序STM32是一种常用的微控制器系列,支持串口通信功能。
串口奇校验是一种常用的校验方式,用于检测和纠正数据传输过程中的错误。
串口奇校验的原理是在数据传输的每个字节中添加一个奇校验位,该位的值由数据位中的所有位相加得出。
如果数据位中的1的数量为偶数,则奇校验位设置为1,反之则设置为0。
接收端在接收数据时,会根据接收到的数据和奇校验位进行校验,如果校验结果与发送端的校验位不一致,则发生了数据错误。
以下是一个使用STM32的串口(USART)配置并实现奇校验的示例程序(使用STM32Cube HAL库):代码如下图(下一页)所示:#include "stm32f4xx_hal.h"UART_HandleTypeDef huart;void SystemClock_Config(void);void USART1_IRQHandler(void) {HAL_UART_IRQHandler(&huart);}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){// 接收完成回调函数// 在这里进行接收到数据的处理}int main(void){HAL_Init();SystemClock_Config();huart.Instance = USART1;huart.Init.BaudRate = 9600;huart.Init.WordLength = UART_WORDLENGTH_8B;huart.Init.StopBits = UART_STOPBITS_1;huart.Init.Parity = UART_PARITY_ODD; // 设置奇校验huart.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart.Init.Mode = UART_MODE_RX;if (HAL_UART_Init(&huart) != HAL_OK){// 初始化错误处理while (1);}HAL_UART_Receive_IT(&huart, &rx_data, 1); // 开启串口中断接收while (1){// 主循环任务}}void SystemClock_Config(void){// 系统时钟配置// ...// 根据目标芯片型号和需要的系统时钟频率进行配置}在这个示例程序中,通过设置UART_InitTypeDef结构体中的Parity参数为UART_PARITY_ODD (UART_PARITY_EVEN为偶校验),选择了奇校验。
stm32串口奇校验原理及程序

stm32串口奇校验原理及程序一、STM32串口通信基本概念STM32串口通信是指通过串行通信接口进行数据传输的一种通信方式。
在日常应用中,串口通信广泛应用于嵌入式系统、工业自动化等领域。
STM32作为一款高性能、低成本的微控制器,支持多种串口通信模式,包括奇校验、偶校验等。
二、奇校验原理及其应用奇校验是一种通过检测数据传输过程中校验位(数据位+校验位)中“1”的个数来判断数据是否发生错误的校验方法。
在STM32串口通信中,奇校验的应用能有效提高数据传输的可靠性。
奇校验原理:1.发送数据时,将数据位与校验位(一般为0)组合成发送数据。
2.接收端检测接收到的数据中“1”的个数,若为奇数,则表示数据正确;若为偶数,则表示数据错误。
三、奇校验程序设置与解析1.设置奇校验的USART初始化结构体:```cUSART_InitTypeDef USARTInitStructure;ART_BaudRate = 9600; // 波特率ART_WordLength = USART_WordLength8b; // 数据位:8位ART_StopBits = USART_StopBits1; // 停止位:1位ART_Parity = USART_ParityOdd; // 奇校验ART_HardwareFlowControl =USART_HardwareFlowControlNone;ART_Mode = USART_Mode_Rx |USART_Mode_Tx;HAL_USART_Init(USARTx, &USARTInitStructure); // 初始化串口```2.发送数据:```cuint8_t send_data = 0x55;HAL_USART_Transmit(&USARTx, &send_data, 1, 1000); // 发送1字节数据,等待1000us```3.接收数据:```cuint8_t receive_data;HAL_USART_Receive(&USARTx, &receive_data, 1, 1000); // 接收1字节数据,等待1000us```四、常见问题及解决方案1.数据传输错误:检查波特率、数据位、停止位和校验位设置是否正确。
stm32单片机温控电路设计_概述说明以及解释

stm32单片机温控电路设计概述说明以及解释1. 引言1.1 概述在现代工业和生活中,温控电路设计是一个非常关键的技术领域。
通过对温度的监测和控制,可以实现许多重要的功能,例如保持设备运行在适宜的温度范围内,提高工作效率,预防过热或过冷导致的故障等。
而STM32单片机则是一种广泛应用于嵌入式系统中的强大的微控制器芯片,在温控电路设计中发挥着重要作用。
1.2 文章结构本文主要分为以下几个部分进行阐述。
首先介绍STM32单片机以及其在嵌入式系统中的作用与优势。
然后详细讲解温控电路设计原理,包括基本原理、主要组成部分等内容。
接着会对温度传感器进行选型与接口设计方面进行深入探讨。
最后,我们将进一步展开讨论其他相关话题并得出结论与展望。
1.3 目的本文旨在通过对STM32单片机温控电路设计的概述说明和解释,帮助读者更好地理解和应用该技术。
同时,将介绍一些常见的温控电路设计原理和方法,以及如何选择适合的温度传感器并设计有效的接口。
通过本文的阅读,相信读者能够对STM32单片机温控电路设计有更深入的了解,并且能够根据实际需求进行具体应用。
2. 正文:2.1 stm32单片机简介STM32单片机是由STMicroelectronics(意法半导体)公司开发的基于ARM Cortex-M内核的微控制器系列。
它具有强大的性能、高度集成的外设以及丰富的接口,广泛应用于各种嵌入式系统中。
2.2 温控电路设计原理温控电路设计的目标是通过对温度进行监测和反馈调节,实现对某个系统或器件的温度进行精确控制。
其原理可以简要分为两个步骤:温度检测和温度调节。
在温度检测方面,我们通常会选用一种合适的温度传感器来实时感知环境或器件中的温度变化。
传感器将通过电压信号、模拟信号或数字信号等形式输出相应的温度数值。
而在温度调节方面,我们使用stm32单片机作为控制器来完成。
借助stm32单片机丰富的外设和强大的处理能力,可以通过与其他元件(如继电器、加热元件等)结合使用,在有效范围内调整或维持系统、器件所需的目标温度。
STM32--数码管显示使用

STM32--数码管显⽰使⽤STM32 – 数码管显⽰简介1.硬件部分STM32F103C8T6 最⼩系统板 ⼀位共阴数码管2.软件部分Keil软件编程 数码管码表硬件部分数码管简介数码管,也称作辉光管,是⼀种可以显⽰数字和其他信息的电⼦设备。
玻璃管中包括⼀个⾦属丝⽹制成的阳极和多个阴极。
⼤部分数码管阴极的形状为数字。
管中充以低压⽓体,通常⼤部分为氖加上⼀些汞和/或氩。
给某⼀个阴极充电,数码管就会发出颜⾊光,视乎管内的⽓体⽽定,⼀般都是橙⾊或绿⾊。
分类数码管也称LED数码管,不同⾏业⼈⼠对数码管的称呼不⼀样,其实都是同样的产品。
按发光⼆极管单元连接⽅式可分为共阳极数码管和共阴极数码管。
共阳数码管是指将所有发光⼆极管的阳极接到⼀起形成公共阳极(COM)的数码管,共阳数码管在应⽤时应将公共极COM接到+5V,当某⼀字段发光⼆极管的阴极为低电平时,相应字段就点亮,当某⼀字段的阴极为⾼电平时,相应字段就不亮。
共阴数码管是指将所有发光⼆极管的阴极接到⼀起形成公共阴极(COM)的数码管,共阴数码管在应⽤时应将公共极COM接到地线GND上,当某⼀字段发光⼆极管的阳极为⾼电平时,相应字段就点亮,当某⼀字段的阳极为低电平时,相应字段就不亮。
1.共阳数码管共阳数码管在应⽤时应将公共极COM接到+5V,当某⼀字段发光⼆极管的阴极为低电平时,相应字段就点亮,当某⼀字段的阴极为⾼电平时,相应字段就不亮。
2.共阴数码管对于共阴极数码管来说,当某个发光⼆极管的阳极为⾼电平时,发光⼆极管点亮,相应的段被显⽰。
同样,共阳极数码管的阳极连接在⼀起,公共阳极接+5V,当某个发光⼆极管的阴极接低电平时,该发光⼆极管被点亮,相应的段被显⽰数码管码表unsigned char code smgduan[17] ={0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8,0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e};//共阳数码管unsigned char code smgduan[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};共阴数码管静态数码管硬件电路设计实物软件部分/*********************************************************************** ⽂件名:smg.c* 描述:smg 应⽤函数库* 硬件连接:-----------------* | PA0 - A |* | PA1 - B |* | PA2 - C |* | PA3 - D |* | PA4 - E |* | PA5 - F |* | PA6 - G |* | PA7 - DP |* -----------------*********************************************************************/#include "smg.h"#include "delay.h"//共阳数码管断码表u8 const smg_data[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};/** 函数名:SMG_GPIO_Config* 描述:配置数码管⽤到的I/O⼝* 输⼊:⽆* 输出:⽆*/void SMG_GPIO_Config(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_SetBits(GPIOA, GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7); // turn o ff all led}/** 函数名:SMG_Display* 描述:驱动数码管显⽰0-F* 输⼊:⽆* 输出:⽆*/void SMG_Display(void){u8 i;for(i=0;i<16;i++){GPIO_Write(GPIOA,smg_data[i]);delay_ms(1000);}}void Display_N(u8 N){GPIO_Write(GPIOA,smg_data[N]);}smg.h#ifndef __SMG_H#define __SMG_H#include "stm32f10x.h"void SMG_GPIO_Config(void);void SMG_Display(void);void Display_N(u8 N);#endif /* __SMG_H */数码管案例(基于51单⽚机四位数码管模块(74HC595))14脚:DS(SER),串⾏数据输⼊引脚13脚:OE, 输出使能控制脚,它是低电才使能输出,所以接GND12脚:RCK,存储寄存器时钟输⼊引脚。
STM32内部温度传感器研究与温度测量系统的实现
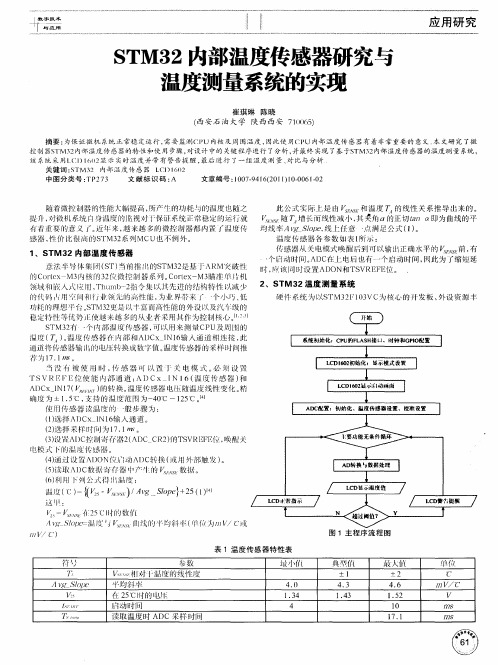
温 度 传感 器 各 参 数 如表 l 永 : 所
‘
传 感 器 从 关 电模 式 I 后 到 可 以输 出 正 确 水 平 的 唤醒 前, 有 个扃 动 时 。 C 上 电后 也 有 个 启 动 u I , AD 在  ̄N 冈此 为 J缩 短 延 , 意 法 半 体 集 闭 ( ) 前 推 …( S M3 是 基 丁 AR S 当 F tf T 2 J M灾 破性 时 , 该 同 时 设 置 AD ON{ T VRE E 。 . HS F 位 的C r x o t M3 骸 的 3 位 微控 制 器 系列 。 otx e 内 2 C re —M3 ̄准 ” 机 H i 、S M 3 T 2温度 测 量 系 统 域 和 嵌 入 』 川 , il 一 指 令 榘 以 其 先 进 『结 构 特 性 以 减 少 2 Th i 2 n b 『 勺 的 代 码 1 伞 叫干 、领 丸 的高 性 能 , 业 界带 来 r ‘ J  ̄ 低 0 ¨ l l , 为 个/ j 、 ,j 硬 仆 系统 为 以S TM3 F 0 VC为 核 心 的 " 发 板 , 设 资 源 丰 2 13 外 功耗 的 想 下 台 。TM3更 足 以 富 而 高 性 能 的 外设 以 及汽 1级 的 S 2 稳 定特 性 等 优 势止 使 越 米越 多的 从业 者 采用 其 作为 控 制 卡 心 。.3 炙 [21 1, S TM3 有 ・ 内部 度 传 感 器 , 以 用 来 测 蕈 C U及 周 嘲 的 2 个 可 P 温 度 ( 。 度 传 感 器 内  ̄ f AD x I 6 入 通 道 相 迮 接 , , r )温 H C —N1输 此 通 道 将 传 感 器 输 … 的 l压 转 换 成 数 彳 值 。 度 传 感器 的 采样 时 间推 乜 温
stm32串口奇校验原理及程序

stm32串口奇校验原理及程序【原创版】目录一、STM32 串口简介二、奇校验原理三、STM32 串口奇校验程序配置四、奇校验在 STM32 串口通信中的应用实例五、注意事项正文一、STM32 串口简介STM32 是一种基于 ARM Cortex-M 内核的微控制器,具有丰富的外设接口,其中包括串口(UART)。
串口是一种通用的、全双工的通信接口,可以用于设备之间的数据传输。
STM32 串口具有多种模式和功能,如异步通信、波特率配置、停止位设置、校验位等。
二、奇校验原理奇校验是一种数据传输校验方式,主要用于检测数据传输中的奇数位错误。
在奇校验模式下,数据传输时,发送方将数据帧的奇数位进行异或操作,接收方收到数据帧后,同样对奇数位进行异或操作,然后将结果与校验位进行比较。
如果比较结果为 0,则表示数据传输正确;如果比较结果不为 0,则表示数据传输出现错误。
三、STM32 串口奇校验程序配置在 STM32 中,要配置奇校验,需要对串口初始化结构体进行设置。
以下是一个简单的示例:```cvoid USART_Init(USART_TypeDef* USARTx){// 配置串口参数USART_ART_BaudRate = 115200; // 波特率USART_ART_WordLength =USART_WordLength_8b; // 数据位长度USART_ART_StopBits = USART_StopBits_1; // 停止位USART_ART_Parity = USART_Parity_奇校验; // 校验位USART_ART_HardwareFlowControl =USART_HardwareFlowControl_None; // 硬件流控USART_ART_Mode = USART_Mode_Rx |USART_Mode_Tx; // 接收和发送模式// 初始化串口USART_Init(USARTx, &USART_InitStructure);}```四、奇校验在 STM32 串口通信中的应用实例假设我们有一个工业传感采集器,需要通过串口与外部设备进行通信。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32F103 内部温度传感器用串口传递到PC上显示程序如下:#include "stm32f10x.h"#include "stm32_eval.h"#include "stm32f10x_conf.h"#include <stdio.h>#define DR_ADDRESS ((uint32_t)0x4001244C) //ADC1 DR寄存器基地址USART_InitTypeDef USART_InitStructure; //串口初始化结构体声明ADC_InitTypeDef ADC_InitStructure; //ADC初始化结构体声明DMA_InitTypeDef DMA_InitStructure; //DMA初始化结构体声明__IO uint16_t ADCConvertedValue; // 在内存中声明一个可读可写变量用来存放AD的转换结果,低12 位有效void ADC_GPIO_Configuration(void);static void Delay_ARMJISHU(__IO uint32_t nCount){ for (; nCount != 0; nCount--);}int main(void){u16 ADCConvertedValueLocal;USART_ART_BaudRate = 115200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;STM_EVAL_COMInit(COM1, &USART_InitStructure);/* Enable DMA1 clock */RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);DMA_DeInit(DMA1_Channel1); //开启DMA1的第一通道DMA_InitStructure.DMA_PeripheralBaseAddr = DR_ADDRESS; DMA_InitStructure.DMA_MemoryBaseAddr=(uint32_t)&ADCConver tedValue;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //DMA 的转换模式为SRC模式,由外设搬移到内存DMA_InitStructure.DMA_BufferSize = 1; //DMA缓存大小,1个 DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //接收一次数据后,设备地址禁止后移DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable;//关闭接收一次数据后,目标内存地址后移DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //定义外设数据宽度为16位 DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //DMA搬移数据尺寸,HalfWord就是为16位DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //转换模式,循环缓存模式。
DMA_InitStructure.DMA_Priority = DMA_Priority_High; //DMA 优先级高DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //M2M模式禁用DMA_Init(DMA1_Channel1, &DMA_InitStructure);/* Enable DMA1 channel1 */DMA_Cmd(DMA1_Channel1, ENABLE);/* Enable ADC1 and GPIOC clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOC, ENABLE); //使能ADC和GPIOC时钟/* ADC1 configuration ------------------------------------------------------*/ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //独立的转换模式ADC_InitStructure.ADC_ScanConvMode = ENABLE; //开启扫描模式ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //开启连续转换模式ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //ADC外部开关,关闭状态ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //对齐方式,ADC为12位中,右对齐方式ADC_InitStructure.ADC_NbrOfChannel = 1; //开启通道数,1个ADC_Init(ADC1, &ADC_InitStructure);/* ADC1 regular channel13 configuration */ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 1, ADC_SampleTime_55Cycles5);//ADC通道组,第11个通道采样顺序1,转换时间/* Enable ADC1 DMA */ADC_DMACmd(ADC1, ENABLE); //ADC命令,使能/* Enable ADC1 */ADC_TempSensorVrefintCmd(ENABLE); //使能温度传感器和内部参考电压通道ADC_Cmd(ADC1, ENABLE); //开启ADC1/* Enable ADC1 reset calibaration register */ADC_ResetCalibration(ADC1); //重新校准/* Check the end of ADC1 reset calibration register */while(ADC_GetResetCalibrationStatus(ADC1)); //等待重新校准完成/* Start ADC1 calibaration */ADC_StartCalibration(ADC1); //开始校准/* Check the end of ADC1 calibration */while(ADC_GetCalibrationStatus(ADC1)); //等待校准完成 /* Start ADC1 Software Conversion */ADC_SoftwareStartConvCmd(ADC1, ENABLE); //连续转换开始,ADC通过DMA方式不断的更新RAM区。
while (1){vu16 Temperature,a,b,c,d;ADCConvertedValueLocal = ADCConvertedValue;Temperature=(1.43-ADCConvertedValueLocal*3.3/4096)*1000/4.3 5 + 25;ADCConvertedValueLocal= Temperature;a =ADCConvertedValueLocal /1000;b = (ADCConvertedValueLocal - a*1000)/100;c = (ADCConvertedValueLocal - a*1000 - b*100)/10;d = ADCConvertedValueLocal - a*1000 - b*100 - c*10;printf("\r\n 当前STM32芯片内部温度为:%d%d%d%d% ℃.\n\r", a, b, c, d);Delay_ARMJISHU(8000000);}}void ADC_GPIO_Configuration(void) //ADC配置函数{GPIO_InitTypeDef GPIO_InitStructure;//PC0 作为模拟通道10输入引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //管脚1GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;//输入模式GPIO_Init(GPIOC, &GPIO_InitStructure); //GPIO组}超级终端显示如下:关于一些数据格式的定义解释:#ifndef __STM32F10x_TYPE_H#define __STM32F10x_TYPE_Htypedef signed long s32;typedef signed short s16;typedef signed char s8;typedef signed long const sc32; typedef signed short const sc16; typedef signed char const sc8;typedef volatile signed long vs32;typedef volatile signed short vs16;typedef volatile signed char vs8;typedef volatile signed long const vsc32;typedef volatile signed short const vsc16;typedef volatile signed char const vsc8;typedef unsigned long u32;typedef unsigned short u16;typedef unsigned char u8;typedef unsigned long const uc32;typedef unsigned short const uc16;typedef unsigned char const uc8;typedef volatile unsigned long vu32;typedef volatile unsigned short vu16;typedef volatile unsigned char vu8;typedef volatile unsigned long const vuc32;typedef volatile unsigned short const vuc16;typedef volatile unsigned char const vuc8;typedef enum {FALSE = 0, TRUE = !FALSE} bool;typedef enum {RESET = 0, SET = !RESET} FlagStatus, ITStatus;typedef enum {DISABLE = 0, ENABLE = !DISABLE} FunctionalState;#define IS_FUNCTIONAL_STATE(STATE) (((STATE) == DISABLE) || ((STATE) == ENABLE)) typedef enum {ERROR = 0, SUCCESS = !ERROR} ErrorStatus;#define U8_MAX ((u8)255)#define S8_MAX ((s8)127)#define S8_MIN ((s8)-128)#define U16_MAX ((u16)65535u)#define S16_MAX ((s16)32767)#define S16_MIN ((s16)-32768)#define U32_MAX ((u32)4294967295uL) #define S32_MAX ((s32)2147483647) #define S32_MIN ((s32)-2147483648)#endif。