机械设计基础2试题样卷库
国家开放大学电大《机械设计基础》机考网考2套题库及答案13
国家开放大学电大《机械设计基础》机考网考2套题库及答案题库一试卷总分:100 答题时间:60分钟一、判断正误题(共11题,共22分)1、机器是由机构组合而成的,机构的组合一定就是机器。
(X)2、合力不一定大于分力。
(V)3、力偶可以合成为一一个合力。
(X)4、在平面四杆机构中,连杆与摇杆是同时存在的,即有连杆就必有摇杆。
(X)5、在曲柄摇杆机构中,摇杆的回程速度定比工作行程的速度要快。
(X)6、构件的强度要求,就是构件有足够的抵抗变形的能力。
(X)7、齿轮的标准压力角和标准模数都在分度圆上。
(J)8、斜齿轮不产生根切的最少齿数小于直齿轮。
(X)9、蜗杆传动--般用于大速比的场合。
(V)10、带传动在1.作时,产生弹性滑动足由于传动过载。
(X)11、通过联轴器联接的两轴可在工作中随时分离。
(X)一、单项选择题(共10题,共30分)1、如下图所示,图中A点处形成的转动副数为()个。
A. 1B.2C. 3D. 42、平面四杆机构中,若各杆长度分别为a=40、b=60、c=60、d=70。
当以a为机架,则此四杆机构为()oA. 双曲柄机构B. 曲植摇杆机构C. 双摇杆机构D. 曲柄滑块机构3、山柄摇杆机构中,山柄为主动件时,()为死点位置。
A. 曲柄与连杆共线时的位置B. 摇杆与连杆共线时的位置C. 不存在.D. 曲柄与连杆成90°4、能实现间歇运动的机构是()A. 曲柄摇杆机构B. 双摇杆机构C. 槽轮机构D. 齿轮机构5、正常齿标准直齿圆柱齿轮的齿全高等于9mm,则模数等于0。
A.2mmB. 2. 5mmC. 3nunD.4mm6、如图所示钢制拉杆承受载荷F=32KN,若材料的许用应力口=120MPa,杆件横截面积为圆形,横截面的最小半径为0A. 9.2mm.B. 9. 2m ·C. 84.9mmD.84.9m7、在普通圆柱蜗杆传动中,若其他条件不变而增加蜗杆头数,将使0。
A. 传动效率提高B. 蜗杆强度提高c. 传动中心距增大D. 蜗杆圆周速度提高.8、带传动中弹性滑动现象的产生是由于0。
机械设计基础2试卷A

第2页共9页带的线速度为v ,则它们的关系为1v ( )v ,2v ( )v 。
9. 对于高速重载的滚子链传动,应选用节距( )的( ) 排链;对于低速重载的滚子链传动,应选用节距( )的链传动。
10. 摩擦离合器靠摩擦力来传递扭矩,两轴可在( )时实现 接合或分离。
二、选择题 ( 每选择2分, 共 42分) 【得分: 】[ ] 1. 平键联接的主要失效形式是 。
A 、 剪切破坏B 、 剪切和挤压破坏C 、 挤压破坏D 、 磨损和胶合[ ] 2. 花键联接的主要失效形式,对静联接是 ○1 , 对动联接是 ○2 。
A 、○1挤压破坏,○2磨损 B 、○1磨损,○2挤压破坏 C 、○1磨损,○2磨损 D 、○1挤压破坏,○2挤压破坏 [ ] 3. 两个齿轮的材料的热处理方式、齿宽、齿数均相同,但模数不同, m 1=2mm ,m 2=4mm ,它们的弯曲承载能力为 。
A 、 相同B 、 m 2的齿轮比m 1的齿轮大C 、与模数无关D 、 m 1的齿轮比m 2的齿轮大[ ] 4. 一对直齿锥齿轮两齿轮的齿宽为b 1、b 2,设计时应取 。
A 、 b 1>b 2B 、 b 1=b 2C 、 b 1<b 2D 、 b 1=b 2+(30~50)mm[ ] 5. 闭式软齿面齿轮传动一般按 ○1 强度设计, 按 ○2 强度校核。
A 、○1接触疲劳,○2弯曲疲劳 B 、○1弯曲疲劳,○2接触疲劳 C 、○1接触疲劳,○2接触疲劳 D 、○1弯曲疲劳,○2弯曲疲劳 [ ] 6. 斜齿圆柱齿轮传动,如螺旋角越大,产生的轴向力 。
A 、越小B 、越大C 、没影响[ ] 7. 蜗杆传动中,蜗杆所受的圆周力F t1的方向总是 A 、与蜗杆的转向相反 B 、与蜗杆的转向相同[ ] 8. 蜗杆传动中,蜗杆所受的径向力F rl 的方向总是第 3 页 共 9 页……………………………………………装………………………………订…………………………线……………………………………………………此处不能书写此处不能书写此处不能书写 此处不能书写此处不能书写 此处不能书写此处不能书写A 、指向蜗杆的轴线B 、背离蜗杆的轴线[ ] 9. 阿基米德圆柱蜗杆与蜗轮传动的 模数,应符合标准值。
(完整版)华南理工大学机械设计基础考试试题二

(完整版)华南理⼯⼤学机械设计基础考试试题⼆华南理⼯⼤学机械设计基础考试试题⼆华南理⼯⼤学《机械设计基础》试题姓名班级学号成绩s⼀、选择题(每⼩题1分,本⼤题共10分)1. 在曲柄摇杆机构中,为提⾼机构的传⼒性能,应该。
A. 增⼤传动⾓γB. 减⼩传动⾓γC. 增⼤压⼒⾓αD. 减⼩极位夹⾓θ2. 渐开线标准齿轮的根切现象,发⽣在。
A. 模数较⼤时B. 模数较⼩时C. 齿数较⼩时D. 齿数较多时3. 标准斜齿圆柱齿轮传动中,查取齿形系数Y F数值时,应按。
A. 法⾯模数m nB. 齿宽bC. 实际齿数ZD. 当量齿数Z v4. 普通圆柱蜗杆分度圆直径的计算式是。
A. d1=m a1qB. d1=m n qC. d1=m a1Z1D. d1=m n Z15. 带传动在⼯作时产⽣弹性滑动,是由于。
A. 包⾓α1太⼩B. 初拉⼒F0太⼩C. 紧边与松边拉⼒不等D. 传动过载6. 在⼀定转速下、要减轻滚⼦链传动的不均匀性和动载荷,应该。
A. 增⼤节距P和增加齿数Z1B. 增⼤节距P和减⼩齿数Z1C. 减⼩节距P和减⼩齿数Z1D. 减⼩节距P和增加齿数Z17. 转轴弯曲应⼒σb的应⼒循环特性为。
A. γ=-1B. γ=0C. γ=+1 D. -1<γ<+18. 在下列四种型号的滚动轴承中,只能承受径向载荷的是。
A. 6208B. N208C.30208 D. 512089. 在下列四种类型的联轴器中,能补偿两轴相对位移以及可缓和冲击,吸收振动的是。
A. 凸缘联轴器B. 齿式联轴器C. 万向联轴器D. 弹性柱销联轴器10. 当⼀对渐开线齿轮制成后,即使两轮的中⼼距稍有改变,其⾓速度⽐仍保持原值不变,原因是。
A. 压⼒⾓不变B. 啮合⾓不变C. 节圆半径不变D. 基圆半径不变⼆、填空题(每空1分,本⼤题共20分)1. 在铰链四杆机构中,存在曲柄的必要条件是和。
2. 在设计凸轮机构中,凸轮基圆半径取得越,所设计的机构越紧凑,但压⼒⾓,使机构的⼯作情况变坏。
(完整版)机械设计基础2套试题答案
《机械设计基础》试题七答案一、填空(每空1分,共20分)1、渐开线标准直齿圆柱齿轮传动,正确啮合条件是模数相等,压力角相等。
2、凸轮机构的种类繁多,按凸轮形状分类可分为:盘形凸轮、移动凸轮、圆柱凸轮。
3、 V带传动的张紧可采用的方式主要有:调整中心距和张紧轮装置。
4、齿轮的加工方法很多,按其加工原理的不同,可分为范成法和仿形法。
5、平面四杆机构中,若各杆长度分别为a=30,b=50,c=80,d=90,当以a为机架,则该四杆机构为双曲柄机构。
6、凸轮机构从动杆的运动规律,是由凸轮轮廓曲线所决定的。
7、被联接件受横向外力时,如采用普通螺纹联接,则螺栓可能失效的形式为__拉断。
二、单项选择题(每个选项0.5分,共20分)()1、一对齿轮啮合时 , 两齿轮的 c 始终相切。
(A)分度圆 (B) 基圆 (C) 节圆 (D) 齿根圆()2、一般来说, a 更能承受冲击,但不太适合于较高的转速下工作。
(A) 滚子轴承 (B) 球轴承 (C) 向心轴承 (D) 推力轴承()3、四杆机构处于死点时,其传动角γ为A 。
(A)0°(B)90°(C)γ>90°(D)0°<γ<90°()4、一个齿轮上的圆有 b 。
(A)齿顶圆和齿根圆(B)齿顶圆,分度圆,基圆和齿根圆(C)齿顶圆,分度圆,基圆,节圆,齿根圆(D)分度圆,基圆和齿根()5、如图所示低碳钢的σ-ε曲线,,根据变形发生的特点,在塑性变形阶段的强化阶段(材料恢复抵抗能力)为图上 C 段。
(A)oab(B)bc(C)cd(D)de()6、力是具有大小和方向的物理量,所以力是 d 。
(A)刚体(B)数量(C)变形体(D)矢量()7、当两轴距离较远,且要求传动比准确,宜采用。
(A) 带传动 (B)一对齿轮传动 (C) 轮系传动(D)螺纹传动()8、在齿轮运转时,若至少有一个齿轮的几何轴线绕另一齿轮固定几何轴线转动,则轮系称为 a 。
《机械设计基础2》试题样卷库(问答题答案)
《机械设计基础2》试题样卷库(问答题答案)《机械设计基础2》试题样卷库(问答题答案)一、简答题1. 什么是机械设计的目标和内容?机械设计的目标是设计出满足特定功能和性能要求的机械产品。
其内容包括产品的结构设计、材料选择、工艺过程、性能评估等方面。
2. 请简述机械设计过程中的设计选择原则。
设计选择原则包括功能和性能要求优先原则、最小重量法则、强度和刚度要求原则、工艺性和可靠性原则、经济性原则等。
3. 什么是机械设计中的静力学基本原理?请列举其中的三个公式。
静力学基本原理是研究物体在静止或恒定速度平衡状态下受力分析的学科。
其中的三个公式包括受力平衡条件、杠杆定律和三角形合力条件。
4. 请简述机构设计中的并联和串联概念。
并联是指两个或多个零件或部件同时作用于同一物体,共同完成一定工作的机构形式。
串联是指两个或多个零件或部件依次连接、作用和相互传递动力的机构形式。
5. 请简述机械设计中的轴的选用原则。
轴的选用原则包括强度和刚度要求、转动精度和位置精度要求、基本荷载和工作条件、加工工艺和材料可供性等方面。
二、计算题1. 某机械零件由A、B两个子零件组成,并行工作。
子零件A的可靠性为0.98,子零件B的可靠性为0.99,请计算整个零件的可靠性。
整个零件的可靠性可以通过子零件的可靠性进行连续可靠性计算,即整体可靠性 = 子零件A的可靠性 ×子零件B的可靠性 = 0.98 × 0.99= 0.9702。
2. 一个分度盘齿轮机构由齿轮G1、G2和齿条组成,已知齿轮G1的模数m=4mm,齿轮G2的齿数Z2=25,齿条的运动速度v=20m/min,请计算分度盘齿轮机构的传动比。
分度盘齿轮机构的传动比可以通过齿轮齿数比来计算,即传动比 =齿轮G2的齿数Z2 / 齿轮G1的齿数Z1。
由模数公式m = π × (Z1+Z2) /(2 ×传动比),可得传动比为:传动比= Z2 / (π × m) = 25 / (π × 4) ≈ 1.99。
(完整版)机械设计基础试题及答案2
《机械设计基础》一、单项选择题(本大题共20小题,每小题2分,共40分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在题后的括号内。
1.在如图所示的齿轮—凸轮轴系中,轴4称为( )A零件B.机构C.构件D.部件2.若组成运动副的两构件间的相对运动是移动,则称这种运动副为( )A.转动副B.移动副C.球面副D.螺旋副3.渐开线齿轮的齿廓曲线形状取决于( )A.分度圆B.齿顶圆C.齿根圆D.基圆4.机构具有确定相对运动的条件是( )A.机构的自由度数目等于主动件数目B.机构的自由度数目大于主动件数目C.机构的自由度数目小于主动件数目D.机构的自由度数目大于等于主动件数目5.一般转速的滚动轴承计算准则为( )A.进行静强度计算B.进行极限转速计算C.进行疲劳寿命计算D.进行热平衡计算6.柴油机曲轴中部的轴承应采用( )A.整体式滑动轴承B. 剖分式滑动轴承C.深沟球轴承D.圆锥滚子轴承7.螺纹联接的自锁条件为( )A.螺纹升角≤当量摩擦角B.螺纹升角>摩擦角C.螺纹升角≥摩擦角D.螺纹升角≥当量摩擦角8.机械运转不均匀系数是用来描述机械运转不均匀程度的重要参数,其表达式为( )A.σωω=-max min B.σωω=+max min2 C.σωωω=-max minm D.σωωωω=-+max minmax min9.铰链四杆机构的死点位置发生在( )A.从动件与连杆共线位置B.从动件与机架共线位置C.主动件与连杆共线位置D.主动件与机架共线位置10.当轴的转速较低,且只承受较大的径向载荷时,宜选用( )A.深沟球轴承B.推力球轴承C.圆柱滚子轴承D.圆锥滚子轴承11.作单向运转的转轴,其弯曲应力的变化特征是( )A.对称循环B.脉动循环C.恒定不变D.非对称循环12.在一般机械传动中,若需要采用带传动时,应优先选用( )A.圆型带传动B.同步带传动C.V型带传动D.平型带传动13.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,则为了获得曲柄摇杆机构,其机架应取( )A.最短杆B.最短杆的相邻杆C.最短杆的相对杆D.任何一杆14.若被联接件之一厚度较大、材料较软、强度较低、需要经常装拆时,宜采用( )A.螺栓联接B.双头螺柱联接C.螺钉联接D.紧定螺钉联接15.在凸轮机构的从动件选用等速运动规律时,其从动件的运动( )A.将产生刚性冲击B.将产生柔性冲击C.没有冲击D.既有刚性冲击又有柔性冲击16.与标准直齿圆柱齿轮的复合齿轮形系数YFS值有关的参数是( )A.工作齿宽bB.模数mC.齿数zD.压力角α17.齿轮传动中,轮齿齿面的疲劳点蚀经常发生在( )A.齿根部分B.靠近节线处的齿根部分C.齿顶部分D.靠近节线处的齿顶部分18.普通圆柱蜗杆传动的正确啮合条件是( ) (注:下标t表示端面,a表示轴向,1表示蜗杆、2表示蜗轮)A.mt1=ma2, αt1=αa2,γ=βB.ma1=mt2, αa1=αt2,γ=βC.mt1=ma2, αt1=αa2,γ=-βD.ma1=ma2, αa1=αt2,γ=-β19.下列联轴器中,能补偿两轴的相对位移并可缓冲、吸振的是( )A.凸缘联轴器B.齿式联轴器C.万向联轴器D.弹性柱销联轴器20.带传动的主要失效形式是带的( )A.疲劳拉断和打滑B.磨损和胶合C.胶合和打滑D.磨损和疲劳点蚀二、填空题(本大题共10小题,每小题1分,共10分)21.在机构中采用虚约束的目的是为了改善机构的运动状况和________。
机械设计基础(二)答案

江阴职业技术学院机电系所有专业 《机械设计基础(二)》期末试卷A参考答案及评分标准一、填空题(每空1分,共20分)1、分度圆 节圆2、标准模数 标准压力角3、仿形法 范成法4、相等 不等5、型号 基准长度6、帘布芯 绳芯7、多 小8、孔 轴9、接触角 轴向 10、转矩 弯矩二、选择题(每题2分,共30分)1、D2、C3、D4、D5、C6、A7、B8、A9、B 10、B 11、D 12、D 13、C 14、C 15、A三、问答题(共10分)1、答:模数、压力角、齿顶高系数、顶隙系数均为标准值,且分度圆上的齿厚等于齿槽宽的齿轮称为标准齿轮。
(模数、压力角、齿顶高系数、顶隙系数、分度圆上的齿厚等于齿槽宽各1分)2、答:按抗扭强度估算轴的最小直径。
(1分)计算公式为:3n PC d ≥ (1分)其中:C ——由轴的材料和受载情况所决定的系数 (1分)P ——轴传递的功率 (1分) n ——轴的转速 (1分)四、计算题(每题10分,共30分)1、解:(10分)该轮系属于行星轮系。
3412414114Z Z Z Z n n n n n n i H H H H H ⋅+=--== (5分) 由图知:04=n (2分)代入上式得:168115214141393901=⨯⨯=--H H n n n 5.1011==n ni H H (2分)H n 和1n 转向相同。
(1分)2、解:(10分)(1)齿轮3的旋向为右旋 (1分)齿轮4的旋向为左旋 (1分)(2)22222222222sin 2cos 22βββββ⋅⋅=⋅⋅=⋅=⋅=Z m T tg Z m T tg d T tg F F n n t a (1分)同理:33333sin 2β⋅⋅=Z m T F n a (1分)要使:32a a F F =则: 33332222sin 2sin 2ββ⋅⋅=⋅⋅Z m T Z m T n n因为:32T T =所以:333222sin 2sin 2ββ⋅⋅=⋅⋅Z m Z m n n (1分)3sin 175115sin 5131β⋅⨯=⋅⨯47.83=β (2分)(3)齿轮2的受力图如下图所示: (3分,每个分力1分)3、解:(10分)(1)计算轴承的当量动载荷P028.0328009200==r a C F 22.0=e 26.03500920==r a F F >eX=0.56 Y=1.99 (2分,X 、Y 各1分)()N YF XF P a r 8.379092099.1350056.0=⨯+⨯=+=(3分,公式2分、结论1分)(2)计算轴承的寿命h L()h P f C f n L P r t h 201558.37902.147800196060106010366=⎪⎭⎫ ⎝⎛⨯⨯⨯=⎪⎪⎭⎫ ⎝⎛=ε(5分,公式3分、结论2分)五、结构改错(共10分)1——轴承外圈没有实现轴向固定2——箱体上的加工面和非加工面应分开3——端盖和箱体之间应有调整垫片4——安装齿轮的轴段长度应小于齿轮的宽度5——齿轮没有实现周向固定(缺键)6——多余轴段7——轴承内圈应留有拆卸高度8——缺密封装置9——端盖内孔直径应略对于轴径10——不同配合要求的零件不能装在同一轴段上11——联轴器没有实现轴向定位江阴职业技术学院机电系所有专业《机械设计基础(二)》期末试卷B参考答案及评分标准一、填空题(每空1分,共20分)1、基圆半径越大2、范成法 173、节圆啮合角4、低大5、小 多6、b c σσσ++1带绕上小带轮上 7、链节距 大 8、调心轴承 成对 9、心轴 转轴 10、球 滚子二、选择题(每题2分,共30分)1、 B2、C3、B4、 D5、D6、 B7、B8、C9、 A 10、A 11、C 12、B 13、D 14、 B 15、A三、问答题(每题5分,共10分)1、答:齿轮传动的失效形式有五种:轮齿折断、齿面点蚀、齿面胶合、齿面磨损、齿面塑性变形 (各1分) 2、答:滚动轴承的支承结构有三种:双支点单向固定支承、一端双向固定一端游动支承、双支点游动支承四、计算题(每题10分,共30分)1、解:该轮系为组合轮系 (1)分清轮系4、5、6组成行星轮系,1、2、3组成定轴轮系 (2分) (2)分别列式46646446Z Z n n n n n n i H HH HH -=--== 464-=--H Hn n n n (1) (2分) 4133113-=-==Z Z n n i (2) (2分) 由图可知:43n n = (3)06=n (4) (2分)由以上四式得:2011-==HH n ni (1分)1n 和H n 方向相反。
《机械设计基础》试题库tkt2
二。
填充题(14分)
1。
在平键标记:键C16×70 GB1096-79中,C 表示键的端部形状是 单圆头 。
16×70表示键的 宽度 和 长度 尺寸。
2。
齿轮传动中,轮齿的疲劳折断是 闭式硬齿面钢齿轮传动 和 铸铁 齿轮传动的主要失效形式。
3。
在蜗杆传动中,引进蜗杆直径系数q ,即对蜗杆分度圆直径d 1规定标准直径系列,其目
的是为了 利于涡轮滚刀的标准化和系列化 。
4。
滚动轴承内圈与轴的公差配合为 基孔 制,而外圈与座孔的配合
采用_____基轴____制。
5。
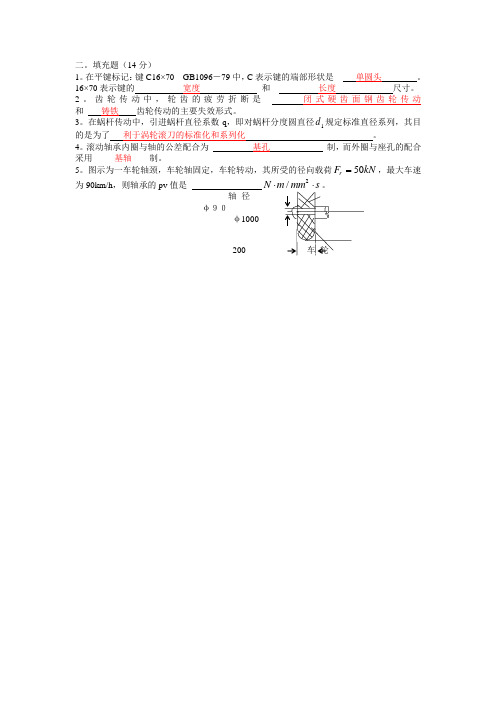
图示为一车轮轴颈,车轮轴固定,车轮转动,其所受的径向载荷F kN r =50,最大车速
为90km/h ,则轴承的pv 值是 N m mm s ⋅⋅/2。
轴 径
φ90
φ1000
200。
《机械设计基础2》试题样卷库(问答题答案)
《机械设计基础2》试题样卷库简答题答案课程概论1、机械设计基础的性质与任务。
答案:机械设计基础是一门重要的技术基础课,是一门具体研究机器或机构的原理、特性、设计计算的技术基础课程。
它是研究机械类产品的设计、开发、制造,满足经济发展和社会需求的基础知识课程。
机械设计工作涉及工程技术的各个领域。
一台新的设备在设计阶段,要根据设计要求确定工作原理及合理的结构,进行运动、动力、强度、刚度分析,完成图样设计,还要研究在制造、销售、使用以及售后服务等方面的问题。
设计人员除必须具有机械设计及与机械设相关的深厚的基础知识和专业知识外,还要有饱满的创造热情。
2、机器的主要特征。
答案:(1)它们都是人为实体(构件)的组合。
(2)各个运动实体(构件)之间具有确定的相对运动。
(3)能够实现能量的转换,代替或减轻人类完成有用的机械功。
3、一部完整的机器由以下四部分组成答案:根据功能的不同,一部完整的机器由以下四部分组成:(1)原动部分:机器的动力来源。
(2)工作部分:完成工作任务的部分。
(3)传动部分:把原动机的运动和动力传递给工作机。
(4)控制部分:使机器的原动部分、传动部分、工作部分按一定的顺序和规律运动,完成给定的工作循环。
4、什么叫机构?机构的主要特征。
答案:机构是由两个以上具有确定相对运动的构件组成的。
机构的主要特征:(1)它们都是人为实体(构件)的组合;(2)各个运动实体之间具有确定的相对运动。
从结构和运动学的角度分析,机器机构之间并无区别,都是具有确定相对运动的各种实物的组合,所以,通常将机器和机构统称为机械。
5、机械分类。
答案:根据用途不同,机械可分为:(1)动力机械实现机械能与其他形式能量间的转换。
(2)加工机械改变物料的结构形状、性质及状态。
(3)运输机械改变人或物料的空间位置。
(4)信息机械获取或处理各种信息。
6、什么叫构件?答案:构件所谓构件,是指机构的基本运动单元。
它可以是单一的零件,也可以是几个零件联接而成的运动单元。
机械设计基础试卷2答案

试卷2答案与评分标准一、单项选择题(每小题1分,共20分。
)1.B2.A3.B4.A5.A6.A7.A8.C9.A 10.D 11.B 12.B 13.C 14.B 15.C 16.A17.B 18.C 19.D 20.D二、填空题(每空1分,共20分。
)21.面 2 22.连接 23.挤压剪切 24. 模数相等压力角相等25.双曲柄曲柄摇杆26.齿面点蚀轮齿折断齿面磨损齿面胶合27.跑合磨损正常磨损剧烈磨损 28. 转轴29. 弯曲疲劳接触疲劳30.好三、判断题(每小题1分,共10分。
)31.√ 32.× 33.√ 34.√ 35.√ 36.× 37.√ 38.√ 39.√ 40.√四、简答题(6+10=16分。
)41. A型平键---2分,宽度b=20mm---2分,长度L=70mm---2分。
42. 7:轴承类型为角接触球轴承---2分,3:宽度系列代号---2分,2:直径系列代号---2分,08:内径代号,d=40mm ---2分,C5:游隙组别为5组---2分。
五、计算题(15+6+3=24分。
)43. m=420/(40+2)=10mm---5分,d1=m×Z1=10×40=400mm---5分,d2= m×Z2=10×80=800mm---5分。
44. F = 3n–2P L–P h ---2分,= 3×5–2×7–0---2分,= 1---2分。
45.---3分六、综合分析题(每个1分,共10分,改正10处以上即得满分-10分。
)46.(1)联轴器上应为通孔;(2)联轴器无轴向定位;(3)键槽位置错误;(4)动静件之间应有间隙;(5)轴承盖处应设密封装置;(6)应有调整垫片;(7)轴承内圈定位过高;(8)与轮毂相配的轴段长度应短于轮毂长度;(9)轴段过长,不利于轴承安装;(10)应设计为阶梯轴;(11)轴承内圈无定位;(12)联轴器无周向固定。
《机械设计基础2》试题样卷库(问答题答案)
《机械设计基础2》试题样卷库简答题答案课程概论1、机械设计基础的性质与任务。
答案:机械设计基础是一门重要的技术基础课,是一门具体研究机器或机构的原理、特性、设计计算的技术基础课程。
它是研究机械类产品的设计、开发、制造,满足经济发展和社会需求的基础知识课程。
机械设计工作涉及工程技术的各个领域。
一台新的设备在设计阶段,要根据设计要求确定工作原理及合理的结构,进行运动、动力、强度、刚度分析,完成图样设计,还要研究在制造、销售、使用以及售后服务等方面的问题。
设计人员除必须具有机械设计及与机械设相关的深厚的基础知识和专业知识外,还要有饱满的创造热情。
2、机器的主要特征。
答案:(1)它们都是人为实体(构件)的组合。
(2)各个运动实体(构件)之间具有确定的相对运动。
(3)能够实现能量的转换,代替或减轻人类完成有用的机械功。
3、一部完整的机器由以下四部分组成答案:根据功能的不同,一部完整的机器由以下四部分组成:(1)原动部分:机器的动力来源。
(2)工作部分:完成工作任务的部分。
(3)传动部分:把原动机的运动和动力传递给工作机。
(4)控制部分:使机器的原动部分、传动部分、工作部分按一定的顺序和规律运动,完成给定的工作循环。
4、什么叫机构?机构的主要特征。
答案:机构是由两个以上具有确定相对运动的构件组成的。
机构的主要特征:(1)它们都是人为实体(构件)的组合;(2)各个运动实体之间具有确定的相对运动。
从结构和运动学的角度分析,机器机构之间并无区别,都是具有确定相对运动的各种实物的组合,所以,通常将机器和机构统称为机械。
5、机械分类。
答案:根据用途不同,机械可分为:(1)动力机械实现机械能与其他形式能量间的转换。
(2)加工机械改变物料的结构形状、性质及状态。
(3)运输机械改变人或物料的空间位置。
(4)信息机械获取或处理各种信息。
6、什么叫构件?答案:构件所谓构件,是指机构的基本运动单元。
它可以是单一的零件,也可以是几个零件联接而成的运动单元。
机械设计基础试题二及答案
机械设计基础试题二及答案一、填空题:(每空1分,共30分)1、力偶矩的、和称为力偶的三要素。
2、两构件相互作用时,它们之间的作用与反作用力必然、、,但分别作用于两个构件上。
3、机器或机构各部分之间应具有运动。
4、一平面铰链四杆机构的各杆长度分别为a=350mm,b=600mm,c=200mm,d=700mm;(1) 当取 c 杆为机架时,它为机构;(2)当取d杆为机架时,则为。
5、渐开线标准直齿圆柱齿轮传动,正确啮合条件是。
6、分度圆上的压力角等于,摸数取的是值,齿厚和齿槽宽的齿轮,称为标准齿轮。
7、槽轮机构能把主动轴的等速连续,转换成从动轴的周期性的运动。
8、槽轮机构、,在进入和脱离啮合时。
但在运动过程中的加速度变化较大,冲击较严重,因而不适用于。
9、在材料、热处理及几何参数均相同的直齿圆柱、斜齿圆柱和直齿圆锥三种齿轮传动中,承载能力最高的是传动,承载能力最低的是传动。
10、齿轮传动的润滑方式主要根据齿轮的选择。
闭式齿轮传动采用油浴润滑时的油量根据确定。
11、带传动的失效形式有和。
12、传动带中的的工作应力包括、和。
13、根据轮系中各个齿轮的几何轴线的位置是否变动,轮系可分为三类:、和混合轮系。
二、选择题:(每题1分,共12分)1、如果力R是F1、F2二力的合力,用矢量方程表示为R=F1+F2,则三力大小之间的关系为( )。
A.必有R=F1+F2;B.不可能有R=F1+F2;C.必有R>F1,R>F2; D可能有R<F1,R<F2。
2、刚体受三力作用而处于平衡状态,则此三力的作用线( )。
A. 必汇交于一点;B. 必互相平行;C. 必都为零;D. 必位于同一平面内。
3、等截面直杆在两个外力的作用下发生轴向压缩变形时,这对外力所具备的特点一定是等值、( )。
A. 反向、共线;B. 反向,过截面形心;C. 方向相对,作用线与杆轴线重合;D方向相对,沿同一直线作用。
4、轴向拉伸杆,正应力最大的截面和剪应力最大的截面( )A. 分别是横截面、450斜截面;B. 都是横截面;C. 分别是450斜截面、横截面;D. 都是450斜截面。
《机械设计基础二》期末考试A卷
以提高联接强度。
A 轮毂长度 B 键的长度 C 键的宽度 D 轮毂宽度
15、弹簧所常用的材料为
。
A 45 钢 B 60Mn C 铸铁 D 铸钢
二、填空题:(每空 1 分,共 10 分)
1、V 带梯形剖面的夹角 为
。
2、加惰轮的轮系只能改变
的旋转方向,不能改变轮系的
。
3、定轴轮系的传动比,等于组成该轮系的所有
五、计算题 1.在图 1 所示轮系中,已知各轮齿数为 Z1=Z3=30,Z2=90, Z2’=40, Z3’=40, Z4=30, 试求传动比 i 1H,并说明I、H轴的转向是否相同?
3
3’
Ⅰ
1 2
H
’
4
2
图1
六、综合题
指出图上的错误并改正。 (用图表示或用文字解释均可)
2
1
9、在中心距不变情况下,两带轮的基准直径之差越大,则小带轮包角也越大。 ( ) 10、V 带的公称尺寸为带的内周长度。 ( ) 四、简答分析题:(每空小题 5 分,共 10 分) 1、摩擦带传动中弹性滑动和打滑对传动有什么影响?两者是否能避免?为什么?
2、说明滚动轴承代号 62206/P4的含义。
A 相同 B 相反 C 有时相同 D 有时相反
11、普通 V 带的公称长度为
长度。
A 外周 B 内周 C 基准 D 公称
12、为了获得大的传动比,可采用
。
A 行星轮系 B 减速器 C 固定轮系 D 惰轮
13、能在不停车的情况下,使两轴结合或分离。
A 离合器 B 联轴器 C 减速器 D 弹性柱销
14、当键联接的强度不够时,可以适当地增加
3、轮系可以实现变速和变向要求。 ( )
机械设计基础2》试题样卷库(问答题答案)

机械设计基础2》试题样卷库(问答题答案)《机械设计基础2》试题样卷库简答题答案课程概论1、机械设计基础的性质与任务。
答案:机械设计基础是⼀门重要的技术基础课,是⼀门具体研究机器或机构的原理、特性、设计计算的技术基础课程。
它是研究机械类产品的设计、开发、制造,满⾜经济发展和社会需求的基础知识课程。
机械设计⼯作涉及⼯程技术的各个领域。
⼀台新的设备在设计阶段,要根据设计要求确定⼯作原理及合理的结构,进⾏运动、动⼒、强度、刚度分析,完成图样设计,还要研究在制造、销售、使⽤以及售后服务等⽅⾯的问题。
设计⼈员除必须具有机械设计及与机械设相关的深厚的基础知识和专业知识外,还要有饱满的创造热情。
2、机器的主要特征。
答案:(1)它们都是⼈为实体(构件)的组合。
(2)各个运动实体(构件)之间具有确定的相对运动。
(3)能够实现能量的转换,代替或减轻⼈类完成有⽤的机械功。
3、⼀部完整的机器由以下四部分组成答案:根据功能的不同,⼀部完整的机器由以下四部分组成:(1)原动部分:机器的动⼒来源。
(2)⼯作部分:完成⼯作任务的部分。
(3)传动部分:把原动机的运动和动⼒传递给⼯作机。
(4)控制部分:使机器的原动部分、传动部分、⼯作部分按⼀定的顺序和规律运动,完成给定的⼯作循环。
4、什么叫机构机构的主要特征。
答案:机构是由两个以上具有确定相对运动的构件组成的。
机构的主要特征:(1)它们都是⼈为实体(构件)的组合;(2)各个运动实体之间具有确定的相对运动。
从结构和运动学的⾓度分析,机器机构之间并⽆区别,都是具有确定相对运动的各种实物的组合,所以,通常将机器和机构统称为机械。
5、机械分类。
答案:根据⽤途不同,机械可分为:(1)动⼒机械实现机械能与其他形式能量间的转换。
(2)加⼯机械改变物料的结构形状、性质及状态。
(3)运输机械改变⼈或物料的空间位置。
(4)信息机械获取或处理各种信息。
6、什么叫构件答案:构件所谓构件,是指机构的基本运动单元。
机械设计基础考试试题卷二及参考答案
班级_______________姓名_________________学号________________装 订 线一、填空题28%1按表面间摩擦状态不同,滑动轴承可分为 滑动轴承和 滑动轴承。
2普通螺栓连接的凸缘联轴器是通过 传递转矩的;铰制孔螺栓连接的凸缘联轴器是通过 传递转矩的。
3蜗杆传动中,蜗杆分度圆柱上的螺旋线升角应等于蜗轮分度圆上的螺旋角,且两螺旋线方向应 。
4.机构具有确定运动的条件是(1) (2) 。
5.曲柄摇杆机构中,当 与 处于两次共线位置之一时,出现最小传动角。
6.在凸轮机构四种常用的推杆运动规律中, 运动规律有刚性冲击; 运动规律和 运动规律有柔性冲击。
7.齿轮传动的重合度越大,表示同时参与啮合的轮齿对数 、齿轮传动也越 。
8. 运动副是指能使两构件之间既能保持 接触,而又能产生一定的形式相对运动的 。
9. 三角带表面上印有B2240,它表示该三角带是 型、 长度为2240mm 。
10.凸轮机构基圆半径越 、压力角越 、机构传动性能越好。
11.闭式软齿面齿轮传动的强度设计,首先按 强度条件计算,校核 。
12.由于渐开线齿轮的传动比等于 ,所以即使两轮的安装中心距略有偏差,也不影响两轮的传动比。
13.常用的间歇运动机构主要有 、 、 等。
14.轴上安装零件有确定的位置,所以要对轴上的零件进行 固定和 固定。
二、简答、判断题21%1.试述摩擦型带传动工作中为什么会产生弹性滑动现象?写出滑动率计算式。
(7分)2.叙述转轴的主要设计步骤,并说明原因。
(7分)3、(1)试述铰链四杆机构曲柄存在的条件; (2)根据图中所注尺寸判断是曲柄摇杆机构、双曲柄机构、还是双摇杆机构,写出判断过程。
(7分)三、作图题21%1.图示为两级蜗杆减速器,蜗轮4为右旋,逆时针方向转动,要求在Ⅱ轴上的蜗杆3与蜗向力方向相反。
要求如图所示:(1)画出蜗杆1的旋转方向,画出蜗轮2的螺旋线方向;(2)画出蜗轮2与蜗杆3的所受各力的方向( 表示方向垂直纸面向里,⊙表示方向垂直纸面向外);(3)画出蜗杆3的螺旋线方向及其旋转方向。
《机械设计基础2》期末模拟试卷
机械设计基础(二)期末模拟试卷一、填空题(本大题共10小题,每小题2分,共20分)1、铰链四杆机构中,固定不动的构件称为_____ ____。
2、V带中,当带垂直底边弯曲时,在带中保持原长度不变的任一条周线称为。
3、渐开线齿轮中,渐开线上各点的压力角不等,离开基圆越近,向径越小,其压力角就越__________。
4、渐开线上某一点的法线与该点所夹的锐角,称为该点的压力角。
5、两渐开线齿轮啮合,两轮的传动比与两轮的转速成比。
6、渐开线直齿圆柱齿轮传动的可分性是指_________不受中心距变化的影响。
7、在标准齿轮分度圆上,齿厚与齿槽宽度(相等、不等)。
8、将斜齿轮的轴线置于(水平、铅垂)位置,螺旋线向右升高者为右旋,向左升高者为左旋。
9、滚动轴承代号为30207,其中的07表示轴承内径为_______mm。
10、直齿锥齿轮传动的基本参数和几何计算均以轮齿(大、小)端为准。
二、判断题(本大题共10小题,每小题2分,共20分)( 错)1、标准齿轮的齿顶高大于齿根高。
( 对)2、凸轮机构可以将凸轮的旋转运动转换成从动件的直线往复运动。
( 错)3、渐开线齿轮的基圆越小其渐开线齿廓越平直。
( 对)4、闭式齿轮传动的主要失效形式为齿面点蚀和轮齿弯曲疲劳折断。
( 对)5、在主动轴转速不变的条件下,应用轮系可使从动轴获得多种转速。
( 对)6、汽车雨刮器采用的是曲柄摇杆机构。
( 错)7、渐开线齿廓上任一点的切线必与基圆相切。
( 错)8、轴的周向固定一般采用键、花键、销、成型轴和间隙配合等联接方式。
( 对)9、调心式滑动轴承的轴瓦位置可以调整以适应轴颈,从而避免轴瓦发生急剧磨损。
( 对)10、轴颈速度过高时,应采用润滑油润滑。
三、选择题(本大题共10小题,每小题2分,共20分)1、平带、V带传动传递运动和动力主要是依靠( D )A、带的紧边拉力B、带的松边拉力C、带的预紧力D、带和带轮接触面间的摩擦力2、自卸卡车翻斗机构属于( C )A、导杆机构B、定块机构C、摇块机构D、曲柄滑块机构3、渐开线齿轮的齿廓曲线形状取决于(B)A、分度圆B、基圆C、齿根圆D、齿顶圆4、选择蜗轮材料通常根据蜗杆传动的( B )A、传递功率B、滑动速度C、传动比D、效率5、型号为6310的滚动轴承,其类型名称为( A )A、深沟球轴承B、调心球轴承C、滚针轴承D、圆锥滚子轴承6、在蜗杆传动中,当其它条件相同时,若要提高传动效率,则蜗杆头数应( A )A、增加B、减小C、保持不变D、或者增加,或者减小7、下列联轴器中,能补偿两轴的相对位移并可缓冲、吸振的是( D )A、凸缘联轴器B、万向联轴器C、齿式联轴器D、弹性套柱销联轴器8、为了实现两根空间交错轴之间的传动,不可以采用( A )A、蜗杆传动B、斜齿圆柱齿轮传动C、直齿锥齿轮传动D、直齿圆柱齿轮传动9、适合于做轴承衬的材料是( B )A、合金钢B、铸铁C、巴氏合金D、非金属材料10、带传动中紧边拉力为F1,松边拉力为F2,则其传递的有效圆周力为(B )A、(Fl-F2)/2B、F1-F2C、Fl+F2D、(F1+F2)/2四、简答题(本大题共2小题,每小题5分,共10分)1、何谓曲柄?曲柄是否就是最短杆?平面四杆机构具有曲柄的条件是什么?2、轴分为哪几种?各承受什么载荷?轴分为传动轴,心轴和转轴转轴受五、应用题(本大题共4小题,共30分)1、图示为一铰链四杆机构,已知各杆长度:AB=10cm,BC=25cm,CD=20cm,AD=30cm。
(完整)机械设计基础试题及答案(二),推荐文档

机械设计基础复习试题一一、单项选择题(本大题共20小题,每小题2分,共40分)在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。
错选、多选或未选均无分。
1.在如图所示的单缸四冲程内燃机中,序号1和10的组合是(A )单肚四冲性内腿机1一尢齿雄2 —肯却体拆一进%紳丁一排代用X扃柄4—违杆,一话嗪苦一植杆孕亠凸轮10—小倚舵题1图A.机构B.构件C.零件D.部件2.机构具有确定相对运动的条件是( A )A. 机构的自由度数目等于主动件数目B. 机构的自由度数目大于主动件数目C. 机构的自由度数目小于主动件数目D. 机构的自由度数目大于等于主动件数目3. 在下列平面四杆机构中,无急回性质的机构是( C )0A. 曲柄摇杆机构B.摆动导杆机构C.对心曲柄滑块机构D.偏心曲柄滑块机构4. 滚子推杆盘形凸轮机构设计中,为避免凸轮实际轮廓曲线失真,正确的方法是(D )A.增大滚子半径B.增加从动件长度C.减小基圆半径D.增大基圆半径5. 在设计直动滚子从动件盘形凸轮机构时,若出现运动失真现象,则应(B )A.减小凸轮基圆半径B.增大凸轮基圆半径C.增大滚子半径D.增大从动件长度6. 在承受横向载荷的普通紧螺栓联接中,螺栓杆所受应力为( C )A.扭切应力B.拉应力C.扭切应力和拉应力D.扭切应力或拉应力7. 普通平键传递扭矩是靠键的(C )A.顶面B.底面C•侧面 D.端面8. 带传动中,U为主动轮圆周速度,U为从动轮圆周速度,u为带速,这些速度之间存在的关系是( B )A. u= u= uB. U> u >UC.u1<u<2uD.u1=u>u29. 带传动正常工作时不能保证准确的传动比是因为( A )A.带存在弹性滑动B.带容易变形和磨损C.带在带轮上打滑D.带的材料不符合虎克定律10. —对渐开线标准直齿圆柱齿轮,m=2mm, z仁18, Z2=43,实际中心距a =62mm,下面说法正确的是( C )A.节圆小于分度圆B.节圆与分度圆重合C.节圆大于分度圆D.分度圆的大小取决于中心距11. 在安装标准直齿圆柱齿轮时,若实际中心距大于标准中心距,则将使( C )A.重合度变大B.定角速比无法保证C.啮合角变大D.分度圆压力角变小12. 齿轮传动中的齿面接触应力变化特征可简化为( A )A.脉动循环变应力B.对称循环变应力C.不变化的静应力D.无规律变应力13. 齿轮传动中,轮齿齿面的疲劳点蚀经常发生在( B )A.齿根部分 B .靠近节线处的齿根部分C•齿顶部分 D .靠近节线处的齿顶部分14. 在传动中,各齿轮轴线位置固定不动的轮系称为( B )A.周转轮系B.定轴轮系D.混合轮系C.行星轮系15. 在下列四种类型的联轴器中,能补偿两轴相对位移以及可缓和冲击、吸收振动的是(D )A.凸缘联轴器B.齿式联轴器;C.万向联轴器D.弹性柱销联轴器16.转轴工作时承受(A )A.转矩和弯矩B.弯矩C.转矩D.摩擦力矩17. 既可以单独作成轴瓦,也可以作成轴承衬的材料是( B )A.锡基轴承合金 B .铸锡青铜C.铅基轴承合金 D .耐磨铸铁18. —般转速的滚动轴承计算准则是(C )A.进行静强度计算B.进行极限转速计算C.进行疲劳寿命计算D.进行热平衡计算19. 滚动轴承的基本额定动载荷是指(C )A. 滚动轴承能承受的最大载荷B. 滚动轴承能承受的最小载荷C. 滚动轴承在基本额定寿命Le= 106转时所能承受的载荷D. —批滚动轴承能承受的平均载荷。
机械设计基础试卷二及答案

机械设计基础试卷二及答案一、判断(每题2分,共10分)1.在曲柄摇杆机构中,极位夹角大于0︒,则机构具有急回运动性质。
()2.V带传动中小带轮的包角可任意选择。
()3.滚子从动件盘形凸轮的基圆是指理论轮廓线上的基圆()4.压力角就是主动件能受驱动力的方向线与该点速度的方向线之间的夹角。
()5.对心移动平底从动件盘形凸轮机构中,其压力角始终保持不变。
()二、填空(每空3分,共15分)1.凸轮机构由、、三个基本构件组成。
2.当机构的极位夹角θ>0︒(K>1)时,机构急回特性,K越急回特性越明显。
3.V带按照截面尺寸由小到大分为七种型号。
4.曲柄摇杆机构最小传动角出现在和共线的位置。
5.带传动的主要失效形式是和。
三、选择题(每题3分,共15分)1.在机械中属于运动单元的是()。
A、机构B、构件C、零件D、部件2.为了保证带传动的传动能力,应验算小带轮的包角α1,并使α1()。
A、<120︒B、≥120︒C、<150︒D、>150︒3.机车车轮机构是铰链四杆机构基本形式中的()机构。
A、曲柄摇杆B、双曲柄C、双摇杆4.当带速v≥35 m/s时,一般采用( )材料来制造带轮。
A、灰铸铁B、塑料C、铸钢D、铝合金5.当机构的自由度数F大于原动件数目时,机构()。
A、具有确定运动B、运动不确定C、构件被破坏四、简答题(15分)1.带传动工作时,带的截面上产生哪些应力?应力沿带全长是如何分布的?最大应力在何处?(5分)2.判断机构是否具有死点位置的依据是什么?通常采用哪些方法使机构顺利通过死点位置?(5分)3.凸轮机构常用的从动件运动规律中,哪些产生刚性冲击?哪些产生柔性冲击?如何选择?(5分)五、计算题(25分)1.计算自由度,并判断机构是否有确定的相对运动。
(10分)2.已知:带传动传递的功率P=5 kW,小带轮转速n1=400 r/min,中心距a =1 500 mm,小带轮基准直径d d1=450 mm,d d2=650 mm,f v=0.2,求带速V、包角α1和有效拉力F。
技能认证机械设计基础考试(习题卷2)

技能认证机械设计基础考试(习题卷2)第1部分:单项选择题,共44题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]铰链四杆机构中,最短杆与最长杆之长度和大于其余两杆长度之和则一定是( )机构。
A)曲柄摇杆B)双曲柄C)双摇杆答案:C解析:2.[单选题]减小基圆半径,凸轮廓线曲率半径( )。
A)增大B)减小C)不变答案:B解析:3.[单选题]经调质处理的45号钢制轴,验算刚度时发现不足,合理的改进方法是( )。
A)改用合金钢B)改变热处理方法C)加大直径答案:C解析:4.[单选题]V带传动用于( )传动。
A)开口传动B)交叉传动C)半交叉传动答案:A解析:5.[单选题]一对圆柱齿轮传动,当两齿轮的材料与热处理方法选定,传动比不变,在主要提高齿面接触疲劳强度,不降低齿根弯曲疲劳强度的条件下,如何调整齿轮参数? ( )A)增大模数B)增大两轮齿数C)增大齿数并减小模数答案:B解析:6.[单选题]设计减速器中的轴,其一般步骤为( )。
A)按转矩初估轴径,再进行轴的结构设计,后用弯扭合成当量弯矩校核或精确校核安全系数B)按弯曲应力初估轴径,再进行轴的结构设计,后用转矩和安全系数校核C)按安全系数定出轴径和长度,后用转矩和弯曲应力校核答案:AA)紧边拉应力B)离心应力C)弯曲应力答案:C解析:8.[单选题]圆柱压缩螺旋弹簧的最大切应力r。
发生在簧丝的( )。
A)内侧B)中心C)外侧答案:A解析:9.[单选题]液体摩擦动压向心轴承偏心距e随( )而增大。
A)轴颈转速的增加或载荷增大B)轴颈转速的减少或载荷增大C)轴颈转速的减少或载荷减少答案:B解析:10.[单选题]曲柄滑块机构有止点时,其主动件为何构件? ( )A)曲柄B)滑块C)曲柄滑块均可答案:B解析:11.[单选题]当机构的自由度数F大于原动件数目时,机构将会( )。
A)具有确定运动B)运动不确定C)构件被破坏D)无影响答案:B解析:12.[单选题]齿轮在什么情况下容易出现根切:A)齿数愈小,则基圆的半径rb愈小B)齿数愈大,则基圆的半径rb愈小C)齿数愈小,则基圆的半径rb愈大D)齿数愈大,则基圆的半径rb愈大答案:A解析:13.[单选题]传递的转矩很小时,可采用( )来作周向固定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械设计基础2》试题样卷库简答题答案课程概论1、机械设计基础的性质与任务。
答案:机械设计基础是一门重要的技术基础课,是一门具体研究机器或机构的原理、特性、设计计算的技术基础课程。
它是研究机械类产品的设计、开发、制造,满足经济发展和社会需求的基础知识课程。
机械设计工作涉及工程技术的各个领域。
一台新的设备在设计阶段,要根据设计要求确定工作原理及合理的结构,进行运动、动力、强度、刚度分析,完成图样设计,还要研究在制造、销售、使用以及售后服务等方面的问题。
设计人员除必须具有机械设计及与机械设相关的深厚的基础知识和专业知识外,还要有饱满的创造热情。
2、机器的主要特征。
答案:(1)它们都是人为实体(构件)的组合。
(2)各个运动实体(构件)之间具有确定的相对运动。
(3)能够实现能量的转换,代替或减轻人类完成有用的机械功。
3、一部完整的机器由以下四部分组成答案:根据功能的不同,一部完整的机器由以下四部分组成:(1)原动部分:机器的动力来源。
(2)工作部分:完成工作任务的部分。
(3)传动部分:把原动机的运动和动力传递给工作机。
(4)控制部分:使机器的原动部分、传动部分、工作部分按一定的顺序和规律运动,完成给定的工作循环。
4、什么叫机构机构的主要特征。
答案:机构是由两个以上具有确定相对运动的构件组成的。
机构的主要特征:(1)它们都是人为实体(构件)的组合;(2)各个运动实体之间具有确定的相对运动。
从结构和运动学的角度分析,机器机构之间并无区别,都是具有确定相对运动的各种实物的组合,所以,通常将机器和机构统称为机械。
5、机械分类。
答案:根据用途不同,机械可分为:(1)动力机械实现机械能与其他形式能量间的转换。
(2)加工机械改变物料的结构形状、性质及状态。
(3)运输机械改变人或物料的空间位置。
(4)信息机械获取或处理各种信息。
6、什么叫构件答案:构件所谓构件,是指机构的基本运动单元。
它可以是单一的零件,也可以是几个零件联接而成的运动单元。
7、什么叫构件答案:零件是组成机器的最小制造单元。
8、材料的选择基本原则。
答案:合理选择材料是机械设计中的重要环节。
选择材料首先必须保证零件在使用过程中具有良好的工作能力,同时还要考虑其加工工艺性和经济性。
9、机械零件的失效及主要失效形式答案:机械零件由于某种原因丧失正常工作能力称为失效。
对于通用的机械零件,其强度、刚度、磨损失效是主要失效形式,对于高速传动的零件还应考虑振动问题。
10、机械零件的设计准则。
答案:(1)强度设计准则(2)刚度准则(3)耐磨性准则(4)振动稳定性准则(5)可靠性准则11、机械零件设计的一般步骤答案:机械零件的设计大体要经过以下几个步骤:(1)根据零件的使用要求(功率、转速等),选择零件的类型及结构形式。
(2)根据机器的工作条件,分析零件的工作情况,确定作用在零件上的载荷。
(3)根据零件的工作条件(包括对零件的特殊要求,如耐高温、耐腐蚀等),综合考虑材料的性能、供应情况和经济性等因素,合理选择零件的材料。
(4)分析零件的主要失效形式,按照相应的设计准则,确定零件的基本尺寸。
(5)根据工艺性及标准化的要求,设计零件的结构及其尺寸。
(6)绘制零件工作图,拟定技术要求。
机械机构12、什么叫平面机构答案:若组成机构的所有构件都在同一平面或平行平面中运动,则称该机构为平面机构。
工程中常见的机构大多属于平面机构。
13、什么叫运动副答案:机构是具有确定相对运动的多构件组合体,为了传递运动和动力,各构件之间必须以一定的方式连接起来,并且具有确定的相对运动。
两构件之间直接接触并能产生一定相对运动的连接称为运动副。
两构件之间直接接触并能产生一定相对运动的连接称为运动副。
14、什么叫平面运动副答案:两构件只能在同一平面内做相对运动的运动副称为平面运动副。
15、平面运动副的分类。
答案:按两构件间接触性质不同,平面运动副通常可分为低副和高副。
16、低副及分类。
答案:两构件形成面与面接触的运动副称为低副,又分转动副和移动副。
17、什么叫高副答案:两构件以点或线的形式相接触而组成的运动副称为高副。
18、转动副和移动副的运动特点有何区别和联系答案:转动副是具有一个独立相对转动的运动副;移动副是沿一个方向独立相对移动的运动副。
它们都是平面低副,具有一个自由度。
19、机构中的构件类型。
答案:机构中的构件有三类:固定不动的构件称为机架(或固定构件);按给定的运动规律独立运动的构件称为原动件;机构中其他活动构件称为从动件。
从动件的运动规律取决于原动件的运动规律及运动副的结构和构件尺寸。
20、什么叫机构运动简图答案:在研究机构运动特性时,为使问题简化,可不考虑构件和运动副的实际结构,只考虑与运动有关的构件数目、运动副类型及相对位置。
用规定的线条和符号表示构件的运动副,并按一定的比例确定运动副的相对位置及与于东有关的尺寸,这种表明机构的组成和各构件间运动关系的简单图形称为机构运动简图。
21、什么叫机构示意图答案:不严格按比例绘制的机构运动简图称为机构示意图。
22、什么叫构件的自由度答案:运动构件相对于参考系所具有的独立运动的数目,称为构件的自由度。
23、什么叫构件的约束答案:当两构件组成运动副后,它们之间的某些相对运动受到限制,对于相对运动所加的限制称为约束。
每加上一个约束,自由构件便失去一个自由度。
运动副的约束数目和约束特点取决于运动副是低副还是高副。
24、什么叫平面机构的自由度平面机构的自由度的计算。
答案:设一个平面构由N个构件组成,其中必有一个构件为机架,则活动构件数为n=N-1。
它们在未组成运动副之前,共有3n个自由度。
用运动副连接后便引入了约束,减少了自由度。
若机构中有P L个低副、P H个高副。
则平面机构的自由度F的计算公式为:F=3n-2P L-P H25、机构具有确定的相对运动的条件是什么答案:机构的原动件数等于机构的自由度数26、什么叫复合铰链怎么处置。
答案:两个以上的构件在同一处以同轴线的转动副相连,称为复合铰链。
一般地,k个构件形成复合铰链应具有(k-1)个转动副,计算自由度时应注意找出复合铰链。
27、什么叫局部自由度怎么处置。
答案:机构中某些构件所产生的局部运动并不影响其他构件的运动。
这些构件所产生的这种局部运动的自由度称为局部自由度。
在计算机构自由度时,局部自由度应略去不计。
28、什么叫虚约束虚约束常出现在那些场合。
答案:机构中与其他约束重复而对机构运动不起新的限制作用的约束,称为虚约束。
计算机构自由度时,应除去不计。
虚约束常出现在下列场合:(1)两构件间形成多个具有相同作用的运动副。
①构件在同一轴线上组成多个转动副。
计算机构自由度时应按一个转动副计算。
②两构件组成多处接触点公法线重合的高副同样应只考虑一处高副,其余为虚约束。
③两构件组成多个导路平行或重合的移动副。
(2)两构件上连接点的运动轨迹互相重合。
在计算机车车轮联动机构的自由度时应除去不计。
29、什么叫连杆机构答案:连杆机构是由若干构件通过低副连接而形成的机构,又称为低副机构。
30、什么叫平面连杆机构答案:活动构件均在同一平面或在相互平行的平面内运动的连杆机构称为平面连杆机构。
31、平面连杆机构的特点。
答案:平面连杆机构的特点是:低副中的两运动副元素为面接触,压强小,易于润滑,磨损小,寿命长;能获得较高的运动精度;可以实现预期的运动规律和轨迹等要求。
但当要求从动件精确实现特定的运动规律时,设计计算较繁杂,而且运动副中的间隙会引起运动积累误差,故往往难以实现。
有些构件所产生的惯性力难以平衡,高速时会引起较大的振动和动载荷。
因此,平面连杆机构常与机器的工作部分相连,起执行和控制作用。
32、平面连杆机构的类型。
答案:33、什么叫铰链四杆机构答案:运动副都是转动副的平面四杆机构称为铰链四杆机构。
34、铰链四杆机构的组成名称。
答案:铰链四杆机构中,固定不动的构件为机架;与机架相联的构件为连架杆,不与机架直接相联的构件称为连杆。
连架杆中,能绕机架的固定铰链作整周转动的称为曲柄,仅能在一定角度范围内往复摆动的称为摇杆。
35、平面四杆机构存在曲柄的条件答案:(1)连架杆和机架中必有一杆为最短杆(简称最短杆条件)。
(2)最短杆与最长杆长度之和小于或等于其余两杆长度之和(简称长度和条件)此条件亦称杆长条件。
36、什么叫急回特性答案:当主动件等速转动时,做往复运动的从动件在返回行程中的平均速度大于工作行程的平均速度的特性。
37、什么叫压力角和传动角对机构传力性能有何影响。
答案:作用在从动件摇杆CD上的力F,与该力作用点C运动线速度v c 之间所夹的锐角α称为压力角。
传动角:压力角的余角即连杆与从动件间所夹的锐角。
压力角越小,传动角越大,机构的传力效果越好。
由此可见,压力角和传动角是反映机构传力性能的重要标志。
38、什么叫死点位置答案:在曲柄摇杆机构中,若摇杆为主动件,当摇杆处于两极限位置时,从动曲柄与连杆共线,主动摇杆通过连杆传给从动曲柄的作用力通过曲柄的转动中心,此时曲柄的压力角α=90°,传动角γ=0°,因此无法推动曲柄转动,机构的这个位置称为死点位置。
39、加大四杆机构原动件上的驱动力,能否是该机构越过死点位置为什么答案:不能。
根据机构死点的概念,因此时传动角为0°,驱动力有效分力为0,机构无法运动。
加大驱动力后,传动角仍为0°,驱动力有效分力仍为0。
40、机构的“死点”位置在什么情况下需要克服在什么情况下应当利用答案:运动时克服,固定夹紧时利用。
41、在什么情况下凸轮机构的从动杆才能得到运动的停歇答案:向径、高度无变化42、简述带传动的优点答案:适于中心矩较大的场合;带具有良好的扰性,可缓和冲击、吸收振动;过载时带与带轮间会出现打滑,打滑虽使传动失效,当可防止损坏其他零件;结构简单、成本低廉;43、何谓带传动的弹性滑动和打滑二者的性质有何不同答案:传动带是弹性体,受到拉力后会产生弹性伸长,伸长量随拉力大小的变化而改变。
带由紧边绕过主动轮进入松边时,带的拉力由F1减小为F2,其弹性伸长量也由δ1减小为δ2,带在紧边和松边时弹性伸长量不同,因此必然在包角范围内产生收缩或伸长,与带轮表面产生相对滑动。
这说明带在绕过带轮的过程中,相对于轮面向后收缩了(δ1-δ2),带与带轮轮面间出现局部相对滑动,导致带的速度逐步小于主动轮的圆周速度,这种由于带的弹性变形而产生的带与带轮间的滑动称为弹性滑动。
弹性滑动和打滑是两个截然不同的概念。
打滑是指过载引起的全面滑动,是一种全面的相对滑动,是可以避免的。
而弹性滑动是由于拉力差引起的,只要传递圆周力,就必然会发生弹性滑动,弹性滑动是带传动固有特性,所以弹性滑动是不可以避免的。
44、在机械传动系统中,为什么经常将带传动布置在高速级带传动正常运行的条件是什么答案:因为带传动具有缓冲吸振,传动平稳,噪声小的特点。