曲线拟合最小二乘法c++程序
曲线拟合最小二乘法c++程序

课题八曲线拟合的最小二乘法实验目标:在某冶炼过程中,通过实验检测得到含碳量与时间关系的数据如下,试求含碳量y与时间t#include<iostream>#include<>using namespace std;int Array(double ***Arr, int n){double **p;int i;p=(double **)malloc(n*sizeof(double *));if(!p)return 0;for(i=0;i<n;i++){p[i]=(double *)malloc(n*sizeof(double));if(!p[i])return 0;}*Arr=p;return 1;}void main(){int n,i,j,k;double **A,*B,*S;S=new double[3];B=new double[3];cout<<"共2有®DN个节¨²点Ì:êo";cin>>n;cout<<"请输º入¨节¨²点Ì值¦Ì(ꡧXi)ê:êo"<<endl;double *X;X = new double[n];for(i=0;i<n;i++){cin>>X[i];}cout<<"请输º入¨节¨²点Ì函¡¥数ºy值¦Ì(ꡧYi)ê:êo"<<endl;double *Y;Y = new double[n];for(i=0;i<n;i++){cin>>Y[i];}if(!Array(&A,3))cout<<"内¨²存ä分¤配失º¡ì败㨹!ê"; else{for(i=0;i<3;i++){for(j=0;j<3;j++){A[i][j]=0;}}for(i=0;i<n;i++){A[0][0]+=1;// cout<<A[0][0];A[0][1]+=X[i];A[0][2]+=X[i]*X[i];A[1][0]=A[0][1];A[1][1]=A[0][2];A[1][2]+=X[i]*X[i]*X[i];A[2][0]=A[0][2];A[2][1]=A[1][2];A[2][2]+=X[i]*X[i]*X[i]*X[i];}}for(i=0;i<3;i++){B[i]=0;}for(i=0;i<n;i++){B[0]+=Y[i];B[1]+=X[i]*Y[i];B[2]+=X[i]*X[i]*Y[i];}for( k = 0; k < 2 ;k++){for(i = k+1; i<3; i++){double T = A[i][k]/A[k][k];B[i] = B[i] - T * B[k];for ( j = k+1 ; j < 3 ; j++ ){A[i][j] = A[i][j] - T * A[k][j];}}}S[2] = B[2]/A[2][2];for (i = 1; i >=0 ; i--){double Temp = 0;for (int j = i+1; j<2 ;j++)Temp = Temp + A[i][j] * S[j];S[i] = (B[i] - Temp) /A[i][i];}cout<<"拟a合曲¨²线为a:êo"<<endl;cout<<"y="<<S[0]<<" + "<<S[1]<<" x + "<<S[2]<<"x^2 "<<endl<<endl<<"误¨®差为a:êo"<<endl;for(i=0;i<n;i++){cout<<"Y"<<i<<"-Y(t"<<i<<")="<<S[0]+S[i]*X[i]+S[2]*X[i ]*X[i]-Y[i]<<endl;}}。
c++最小二乘法迭代拟合曲线

最小二乘法迭代拟合曲线是一种数学方法,用于通过最小化误差平方和来拟合数据点。
在C++中,可以使用以下步骤实现最小二乘法迭代拟合曲线:1. 定义数据点的结构体,包含x和y坐标。
2. 计算数据点的平均值。
3. 计算协方差矩阵。
4. 计算协方差矩阵的特征值和特征向量。
5. 使用特征向量作为基向量,将数据点投影到新的坐标系。
6. 在新坐标系中,使用线性回归拟合曲线。
7. 将拟合曲线转换回原始坐标系。
以下是一个简单的C++实现:cpp#include <iostream>#include <vector>#include <cmath>#include <Eigen/Dense>struct Point {double x;double y;};double mean(const std::vector<Point>& points) {double sum = 0;for (const auto& point : points) {sum += point.x;}return sum / points.size();}Eigen::MatrixXd covariance_matrix(const std::vector<Point>& points) { double mean_x = mean(points);double mean_y = mean(points);Eigen::MatrixXd cov(2, 2);cov << 0, 0, 0, 0;for (const auto& point : points) {double dx = point.x - mean_x;double dy = point.y - mean_y;cov(0, 0) += dx * dx;cov(0, 1) += dx * dy;cov(1, 0) += dx * dy;cov(1, 1) += dy * dy;}return cov;}std::pair<double, double> least_squares_iterative_fit(const std::vector<Point>& points) {Eigen::MatrixXd cov = covariance_matrix(points);Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> solver(cov);Eigen::VectorXd eigenvalues = solver.eigenvalues();Eigen::MatrixXd eigenvectors = solver.eigenvectors();Eigen::VectorXd mean_vec(2);mean_vec << mean(points), mean(points);Eigen::VectorXd projected_mean = eigenvectors.transpose() * mean_vec;Eigen::VectorXd projected_points(points.size());for (size_t i = 0; i < points.size(); ++i) {Eigen::VectorXd point_vec(2);point_vec << points[i].x, points[i].y;projected_points(i) = (eigenvectors.transpose() * point_vec)(0);}double a = projected_points.sum() / points.size();double b = projected_mean(0);return std::make_pair(a, b);}int main() {std::vector<Point> points = {{1, 2}, {2, 3}, {3, 4}, {4, 5}, {5, 6}};auto result = least_squares_iterative_fit(points);std::cout << "y = " << result.first << "x + " << result.second << std::endl;return 0;}这个示例中,我们使用了一个简单的线性模型(y = ax + b)来拟合数据点。
c语言最小二乘法拟合曲线
c语言最小二乘法拟合曲线C语言中,可以使用最小二乘法来拟合曲线。
最小二乘法是一种常用的数学优化方法,用于找到一条曲线,使得曲线和实际数据之间的误差最小。
下面是一个简单的示例代码,使用最小二乘法来拟合一条直线的曲线。
c#include <stdio.h>// 最小二乘法拟合直线void leastSquareFit(int n, double x[], double y[], double* slope, double* intercept) {// 计算 x 和 y 的平均值double sumX = 0, sumY = 0;for (int i = 0; i < n; i++) {sumX += x[i];sumY += y[i];}double meanX = sumX / n;double meanY = sumY / n;// 计算直线的斜率double numerator = 0, denominator = 0;for (int i = 0; i < n; i++) {numerator += (x[i] - meanX) * (y[i] - meanY);denominator += (x[i] - meanX) * (x[i] - meanX);}*slope = numerator / denominator;// 计算直线的截距*intercept = meanY - (*slope) * meanX;}int main() {// 原始数据double x[5] = {1, 2, 3, 4, 5};double y[5] = {2, 4, 6, 8, 10};// 拟合结果double slope, intercept;leastSquareFit(5, x, y, &slope, &intercept);printf("拟合直线方程:y = %.2fx + %.2f\n", slope, intercept);return 0;}运行以上代码,将得到拟合直线方程为:`y = 2.00x + 0.00`。
c++曲线拟合算法
c++曲线拟合算法
C++中有多种曲线拟合算法可供选择,以下是其中一些常用的算法:
1. 最小二乘法(Least Squares Method):最小二乘法是一种常见的曲线拟合方法,通过最小化残差平方和来拟合数据点。
C++中可以使用线性回归或非线性优化库(如Eigen、Ceres Solver、GSL等)实现最小二乘拟合。
2. 多项式拟合(Polynomial Fitting):多项式拟合通过拟合一条多项式曲线来逼近数据点。
C++中可以使用最小二乘法或其他数值计算库实现多项式拟合。
3. 样条曲线拟合(Spline Curve Fitting):样条曲线拟合是一种平滑的曲线拟合方法,通过连接多个小段曲线来逼近数据点。
C++中可以使用数值计算库(如Boost、GSL)或专门的插值库(如Spline、Dlib)实现样条曲线拟合。
4. 非线性最小二乘法(Nonlinear Least Squares):非线性最小二乘法用于拟合非线性模型,通常需要使用迭代优化算法(如Levenberg-Marquardt算法)来寻求最优解。
C++中可以使用非线性优化库(如Ceres Solver、NLopt、GSL)实现非线性最小二乘拟合。
以上仅是一些常用的曲线拟合算法,具体选择应根据您的数据特点、拟合需求和项目要求来决定。
您可以根据具体情况选择适合的算法,并使用相应的数值计算库或优化库进行实现。
最小二乘法C语言的实现

实验三.最小二乘法C语言的实现1.实验目的:进一步熟悉曲线拟合的最小二乘法。
掌握编程语言字符处理程序的设计和调试技术。
2.实验要求:输入:已知点的数目以及各点坐标。
输出:根据最小二乘法原理以及各点坐标求出拟合曲线。
3.程序流程:(1)输入已知点的个数;(2)分别输入已知点的X坐标;(3)分别输入已知点的Y坐标;(4)通过调用函数,求出拟合曲线。
最小二乘法原理如下:根据一组给定的实验数据,求出自变量x与因变量y的函数关系,只要求在给定点上的误差的平方和最小.当时,即(4.4.1)这里是线性无关的函数族,假定在上给出一组数据,以及对应的一组权,这里为权系数,要求使最小,其中(4.4.2)(4.4.2)中实际上是关于的多元函数,求I的最小值就是求多元函数I的极值,由极值必要条件,可得(4.4.3)根据内积定义引入相应带权内积记号(4.4.4)则(4.4.3)可改写为这是关于参数的线性方程组,用矩阵表示为(4.4.5)(4.4.5)称为法方程.当线性无关,且在点集上至多只有n个不同零点,则称在X上满足Haar条件,此时(4.4.5)的解存在唯一。
记(4.4.5)的解为从而得到最小二乘拟合曲线(4.4.6) 可以证明对,有故(4.4.6)得到的即为所求的最小二乘解.它的平方误差为(4.4.7) 均方误差为在最小二乘逼近中,若取,则,表示为(4.4.8)此时关于系数的法方程(4.4.5)是病态方程,通常当n≥3时都不直接取作为基。
程序流程图:↓↓程序:#include <math.h> #include <stdio.h> #include <stdlib.h> #include<malloc.h>float average(int n,float *x) {int i; float av; av=0;for(i=0;i<n;i++) av+=*(x+i);return(av);}//平方和float spfh(int n,float *x){int i;float a,b;a=0;for(i=0;i<n;i++)a+=(*(x+i))*(*(x+i));return(a);}//和平方float shpf(int n,float *x){int i;float a,b;a=0;for(i=0;i<n;i++)a=a+*(x+i);b=a*a/n;return(b);}//两数先相乘,再相加float dcj(int n,float *x,float *y) {int i;float a;a=0;for(i=0;i<n;i++)a+=(*(x+i))*(*(y+i));return(a);}//两数先相加,再相乘float djc(int n,float *x,float *y) {int i;float a=0,b=0;for(i=0;i<n;i++){a=a+*(x+i);b=b+*(y+i);}a=a*b/n;}//系数afloat xsa(int n,float *x,float *y){float a,b,c,d,e;a=spfh(n,x);b=shpf(n,x);c=dcj(n,x,y);d=djc(n,x,y);e=(c-d)/(a-b);//printf("%f %f %f %f",a,b,c,d);return(e);}float he(int n,float *y){int i;float a;a=0;for(i=0;i<n;i++)a=a+*(y+i);return(a);}float xsb(int n,float *x,float *y,float a){ float b,c,d;b=he(n,y);c=he(n,x);d=(b-a*c)/n;return(d);}void main(){ int n,i;float *x,*y,a,b;printf("请输入将要输入的有效数值组数n的值:"); scanf("%d",&n);x=(float*)calloc(n,sizeof(float));if(x==NULL){printf("内存分配失败");exit(1);}y=(float*)calloc(n,sizeof(float));if(y==NULL){printf("内存分配失败");exit(1);}printf("请输入x的值\n");for(i=0;i<n;i++)scanf("%f",x+i);printf("请输入y的值,请注意与x的值一一对应:\n"); for(i=0;i<n;i++)scanf("%f",y+i);for(i=0;i<n;i++){ printf("x[%d]=%3.2f ",i,*(x+i));printf("y[%d]=%3.2f\n",i,*(y+i));}a=xsa(n,x,y);b=xsb(n,x,y,a);printf("经最小二乘法拟合得到的一元线性方程为:\n"); printf("f(x)=%3.2fx+%3.2f\n",a,b);}。
C++最小二乘法求多项式拟合曲线

// shujunihe.cpp : 定义控制台应用程序的入口点。
//// quanzhuyuan.cpp : 定义控制台应用程序的入口点// #include "stdafx.h"#include <iostream>#include <string>#include <cmath> using namespace std;class shujunihe{public :shujunihe():xlh(0),fyl( false ),cnt(0),n(9){}void printb( double (&)[3]);void printa( double [3][3]);void quanzhuyuan( double a[3][3], double b[], int x2[3]);void restoreA( double a[3][3], double x[]);double Sum( int r,int c,double []); double Sumf( int r, double f[], double x[]);void restoreB( double b[], double f[], double x[]); voidprintx2( int x[]);private :int xlh; bool fyl; int cnt;int n;};void shujunihe::printx2( int x2[]){for (int i=0;i<3;i++) cout<<x2[i]<< " " ;cout<<endl;}void shujunihe::restoreB( double b[], double f[], double x[]) {for (int i=0;i<=2;i++){ b[i]=Sumf(i,f,x);}}double shujunihe::Sumf( int r, double f[], double x[]){double sum=0;for (int i=0;i<=n-1;i++){ sum+=f[i]*pow(x[i], r);}return sum;void printx( double x[3], double a[3][3], double b[3], intn);}double shujunihe::Sum( int r,int c,double x[]){double sum=0;for (int i=0;i<=n-1;i++ ){ sum+=pow(x[i], r+c);}return sum;}void shujunihe::restoreA( double a[3][3], double x[]){for (int i=0;i<=2;i++){for (int j=0;j<=2;j++){ a[i][j]=Sum(i,j,x);}}a[0][0]=n;}void shujunihe::quanzhuyuan( double d[3][3], double c[3], int x2[3]) {double max;int row,col;double temp1,temp2; int temp3;double btemp1;for (int i=0;i<3;i++){max=fabs(d[i][i]);row=i;col=i;for (int j=i;j<3;j++){for (int k=i;k<3;k++){if (fabs(d[j][k])>max){max=fabs(d[j][k]);row=j;col=k;}}/*for(int n=0;n<d.length;n++)//hang {temp1=a[i][n];a[i][n]=a[row][n]; a[row][n]=temp1;btemp1=b[i];b[i]=b[row];b[row]=btemp1;}for(int m=0;m<d.length;m++)//lie{temp2=a[m][i]; a[m][i]=a[m][col];a[m][col]=temp2;}*/if (col!=i&&row!=i){fyl= true ;xlh=col;for (int n=0;n<3;n++) //hang {temp1=d[i][n];d[i][n]=d[row][n];d[row][n]=temp1;btemp1=c[i];c[i]=c[row];c[row]=btemp1;}for (int m=0;m<3;m++) //lie {temp2=d[m][i];d[m][i]=d[m][col];d[m][col]=temp2;}}elseif(row!=i&&col==i)for (int n=0;n<3;n++) //hang{temp1=d[i][n]; d[i][n]=d[row][n];d[row][n]=temp1; btemp1=c[i];c[i]=c[row]; c[row]=btemp1;}}elseif (col!=i&&row==i){fyl= true ;//liefor (int m=0;m<3;m++){ xlh=col; temp2=d[m][i];d[m][i]=d[m][col];d[m][col]=temp2;if (fyl){temp3=x2[i];x2[i]=x2[xlh];x2[xlh]=temp3;//x1[cnt]=i;//y1[cnt]=xlh;cnt++;fyl= false ;}for (int j=i+1;j<3;j++) //J 表示行{double l=d[j][i]/d[i][i];for (int e=i+1;e<3;e++) //e 表示 j 行对于的每一列{ d[j][e]=d[j][e]-l*d[i][e];}c[j]=c[j]-l*c[i];d[j][i]=0;}}}void shujunihe::printx( double x[3], double a[3][3], double b[3], int n) {x[n-1]=b[n-1]/a[n-1][n-1];for (int i=n-2;i>=0;i--){double sum=0;for (int j=i+1;j<=n-1;j++){sum+=a[i][j]*x[j];}x[i]=1/a[i][i]*(b[i]-sum);}for (int k=0;k<=n-1;k++) cout<<x[k]<< " cout<<endl;}void shujunihe::printa( double a[3][3]){for (int i=0;i<3;i++){for (int j=0;j<3;j++) cout<<a[i][j]<< " ";cout<<endl;}}void shujunihe::printb( double (&b)[3]){int size= sizeof (b)/ sizeof (double );for (int s=0;s<size;s++){ cout<<b[s]<< " " ;}cout<<endl;}int main(){double x[]={1,3,4,5,6,7,8,9,10};double f[]={10,5,4,2,1,1,2,3,4};double a[3][3];double b[3];double x1[3];int x2[3]={1,2,3}; shujunihe xy; xy.restoreA(a,x);xy.restoreB(b,f,x); cout<< " 正规方程的系数矩阵a" <<endl;xy.printa(a);cout<< " 正规方程的 b" <<endl;xy.printb(b);xy.quanzhuyuan(a,b,x2);cout<< " 全主元化简后的系数矩阵 a" <<endl; xy.printa(a);cout<< " 全主元化简后的 b" <<endl; xy.printb(b);cout<< "x 的求解的值 "<<endl; xy.printx(x1,a,b,3);coutvv "x对应的位置"vvendl; xy.printx2(x2);}。
c++ 最小二乘法拟合椭圆方程

C++最小二乘法拟合椭圆方程椭圆是数学中的一个重要概念,它在几何学、物理学、工程学等领域都有着广泛的应用。
在实际的问题中,我们经常需要对给定的椭圆数据进行拟合,以找到与其最符合的椭圆方程。
而在C++编程中,最小二乘法是求解拟合问题的一种常用方法。
本文将介绍如何利用C++语言实现最小二乘法拟合椭圆方程的过程。
一、最小二乘法原理1. 概念介绍最小二乘法是一种数学优化方法,用于对一组数据进行曲线拟合。
其核心思想是通过最小化实际观测值与拟合值之间的误差平方和来确定拟合参数的取值,从而使拟合曲线尽可能地接近实际观测值。
在椭圆拟合问题中,最小二乘法可以帮助我们找到与给定数据最匹配的椭圆方程。
2. 公式推导假设我们有一组椭圆数据点(xi, yi),我们需要找到一个椭圆方程,使得数据点到椭圆边界的距离之和最小。
椭圆方程的一般形式为:(x - x0)^2 / a^2 + (y - y0)^2 / b^2 = 1其中,(x0, y0)为椭圆中心坐标,a和b分别为长轴和短轴的长度。
我们可以建立参数方程表示椭圆上的点:x = x0 + a * cos(t)y = y0 + b * sin(t)将数据点(xi, yi)代入方程,可以得到误差函数:E = Σ[(x - xi)^2 / a^2 + (y - yi)^2 / b^2 - 1]^2其中,Σ表示求和符号,E表示误差平方和。
通过最小化误差函数E,可以求得参数x0, y0, a, b的最优解,从而得到最符合给定数据的椭圆方程。
二、C++代码实现1. 数据输入我们需要从外部读入椭圆数据点(xi, yi),并存储到数组或向量中,以备后续处理。
2. 参数优化接下来,我们可以使用最小二乘法对椭圆方程的参数进行优化。
C++中可以通过梯度下降法、牛顿法等数值优化算法来求解最小化误差函数的过程,从而得到最优的椭圆参数。
3. 结果输出我们可以将优化后的椭圆方程参数输出,得到拟合结果。
用c语言实现离散点拟合曲线

用c语言实现离散点拟合曲线离散点拟合曲线是一种利用已知数据点来推断未知数据点的方法。
在计算机科学领域,离散点拟合曲线通常是一个重要的问题,因为它可以帮助我们在数据可视化,数据分析和数据预测中更好地理解数据的变化。
在C语言中实现离散点拟合曲线有多种方法,下面介绍其中一种通用的方法,即使用最小二乘法。
最小二乘法是一种对数据进行拟合的方法,它基于最小化数据点和曲线之间的距离来查找最符合数据的函数。
下面是C语言实现离散点拟合曲线的步骤:1. 收集数据点,包括x和y的坐标。
2. 创建一个公式来表示拟合曲线(例如,直线,二次曲线等等)。
3. 对于每个数据点,计算该点在拟合曲线上的值,并计算该值与实际值之间的距离。
4. 最小化所有距离的平方和。
这就是所谓的最小二乘法。
5. 可以使用数值计算库(例如GNU Scientific Library)来解决最小二乘法问题,或手动实现。
下面是一个使用C语言手动实现最小二乘法来拟合一条直线的示例代码:```c#include <stdio.h>#include <stdlib.h>#define MAX_POINTS 50int main() {int num_points;double x[MAX_POINTS], y[MAX_POINTS], sum_x = 0.0, sum_y = 0.0, sum_xx = 0.0, sum_xy = 0.0;double a, b;printf("Enter the number of data points: ");scanf("%d", &num_points);if (num_points > MAX_POINTS) {printf("Too many data points, exiting...\n");exit(1);}for (int i = 0; i < num_points; i++) {printf("Enter point %d (x, y): ", i+1);scanf("%lf %lf", &x[i], &y[i]);sum_x += x[i];sum_y += y[i];sum_xx += x[i] * x[i];sum_xy += x[i] * y[i];}a = (num_points * sum_xy - sum_x * sum_y) / (num_points * sum_xx - sum_x * sum_x);b = (sum_y - a * sum_x) / num_points;printf("\nThe linear equation that best fits the given data:\n"); printf("y = %.2lfx + %.2lf\n", a, b);return 0;}```在上述示例代码中,我们首先使用`scanf()`函数获取数据点的数量和每个数据点的x和y坐标。
最小二乘法一阶线性拟合二阶曲线拟合的C语言程序实现
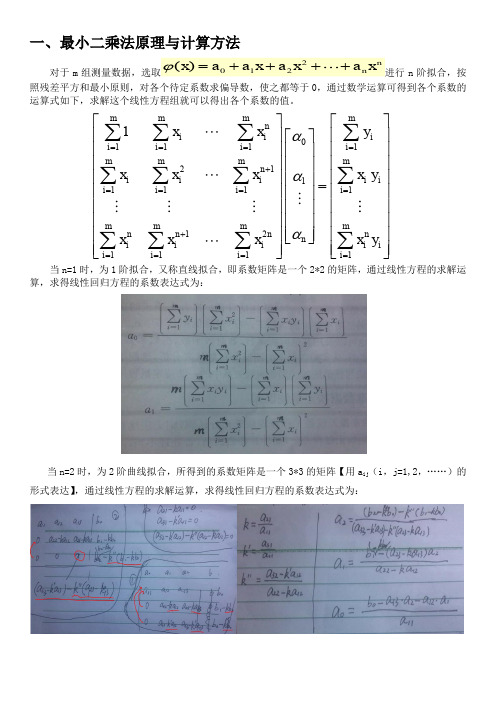
一、最小二乘法原理与计算方法
对于 m 组测量数据,选取
( x) a0 a1 x a2 x 2
二、1 阶 2 阶拟合功能子函数和计算表达式
通过分析以上系数计算式中各项计算式,写出全部需要用到的子函数:
通过对照系数表达式里各个项的计算表达,写入主函数进行拟合计算。设定输入的数据格式为(x[ i ],y[ i ]) ,用 户输入数据的个数为 c,计算表达式程序代码如下: 1 阶直线拟合:
2 阶曲线拟合:
三、主函数代码
四、用 MATLAB 验证程序的运行结果
第一组:选择 y=x+1 进行线性拟合检验,可见 2 阶拟合对于线性关系,二次项系数为 0
第二组:选择 y=x^2+1入部分的设计参考了[物理实验计算器.
Zhouzb .
zhouzb889@]的部分代码,在此表示感谢。
m n i
当 n=1 时,为 1 阶拟合,又称直线拟合,即系数矩阵是一个 2*2 的矩阵,通过线性方程的求解运 算,求得线性回归方程的系数表达式为:
当 n=2 时,为 2 阶曲线拟合,所得到的系数矩阵是一个 3*3 的矩阵【用 aij(i,j=1,2,……)的 形式表达】 ,通过线性方程的求解运算,求得线性回归方程的系数表达式为:
智能仪器设计作业——最小二乘法——高世浩 1223150078
x
i 1 m
m
i
x
i 1
2 i
x
i 1
m
n 1 i
m x yi 0 i 1 i 1 m m n 1 x x y i 1 i i i 1 i 1 m m n xin yi xi2 n i 1 i 1
最小二乘法 c语言

最小二乘法 c语言最小二乘法是一种常用的数学方法,用于通过已知数据点拟合出一条最佳拟合曲线。
在本文中,我们将讨论如何使用C语言实现最小二乘法。
我们需要明确最小二乘法的基本原理。
最小二乘法的目标是找到一条曲线,使得该曲线上的点到已知数据点的距离之和最小。
具体地,我们假设已知数据点的集合为{(x1, y1), (x2, y2), ..., (xn, yn)},我们需要找到一条曲线y = f(x),使得f(xi)与yi的差的平方和最小。
那么,如何在C语言中实现最小二乘法呢?首先,我们需要定义一个函数来计算拟合曲线上的点f(xi)。
在这个函数中,我们可以使用多项式的形式来表示拟合曲线。
例如,我们可以选择使用一次多项式y = ax + b来拟合数据。
然后,我们可以使用最小二乘法的公式来计算出最优的a和b的值。
接下来,我们需要编写一个函数来计算拟合曲线上每个点f(xi)与已知数据点yi的差的平方和。
通过遍历已知数据点的集合,并计算每个点的差的平方,最后将所有差的平方求和,即可得到拟合曲线的误差。
然后,我们可以使用梯度下降法来最小化误差函数。
梯度下降法是一种优化算法,通过不断迭代来找到误差函数的最小值。
在每次迭代中,我们通过计算误差函数对参数a和b的偏导数,来更新a和b的值。
通过多次迭代,最终可以找到最优的a和b的值,从而得到最佳拟合曲线。
我们可以编写一个主函数来调用以上的函数,并将最终的拟合曲线绘制出来。
在这个主函数中,我们可以读取已知数据点的集合,并调用最小二乘法函数来计算拟合曲线的参数。
然后,我们可以使用绘图库来绘制已知数据点和拟合曲线,并将结果输出到屏幕上。
通过以上的步骤,我们就可以使用C语言实现最小二乘法了。
当然,在实际应用中,我们可能会遇到更复杂的数据和更高阶的多项式拟合。
但是基本的原理和方法是相同的,只是需要做一些适当的调整。
总结一下,最小二乘法是一种常用的数学方法,用于通过已知数据点拟合出一条最佳拟合曲线。
最小二乘法C语言编程
#include <hidef.h> /* common defines and macros */
#include "derivative.h" /* derivative-specific definitions */
x2=x*x*x*x;
x3+=x2;
}
*(pp++)=x3;
}
}
pp=*(b+1);
p=a9;
ppp=a8;
x3=0;
for(i=0;i<10;i++) {
x=*(p++);
x2=*(ppp++);
x3+=x*x2;
}
*pp=x3;
pp=*(b+2);
p=a9;
ppp=a8;
x3=0;
for(i=0;i<10;i++) {
*(p++)=(x1*x5-x2*x4);
p=*(b1+0);
pp=*(b4+0);
for (i=0;i<3;i++) {
for(j=0;j<3;j++){
x1=*(p++);
x=x1*c;
*(pp++)=x;
}
}
//////////////////////////求两矩阵的商//////////////////////////////////////
最小二乘法拟合任意次曲线(C#)

最小二乘法拟合任意次曲线(C#)说明:代码较为简洁没有过多的说明,如有不明白之处可查阅相关最小二乘法计算步骤资料和求解线性方程组的资料。
另外该方法只能实现二元N次拟合,多元方程不适用。
以下是最小二乘法类的实现:public class MatrixEquation{private double[,] gaussMatrix;private int coe;public MatrixEquation(){}public MatrixEquation(double[] arrX, double[] arrY, int n){coe = n;gaussMatrix= GetGauss(GetXPowSum(arrX, n), GetXPowYSum(arrX, arrY, n), n);}public double[,] GetGaussMatrix(){return gaussMatrix;}public double[] GetResult(){return ComputeGauss(gaussMatrix, coe);}/// <summary>/// 计算获取x散点的幂次和数组/// </summary>/// <param name="arrX">x散点序列</param>/// <param name="n">函数拟合次数</param>/// <returns></returns>protected double[] GetXPowSum(double[] arrX, int n){int m = arrX.Length;//X散点的个数double[] xPow = new double[2 * n + 1]; //存储X散点的幂次值for (int i = 0; i < xPow.Length; i++){if (i == 0){xPow[i] = m;}else{//计算x的i次方和double max = 0;for (int j = 0; j < m; j++){if (arrX[j] == 0)max = max + 1;elsemax = max + Math.Pow(arrX[j], i);}xPow[i] =Math.Round( max,4);}}return xPow;}/// <summary>/// 计算获取xy的幂次和序列/// </summary>/// <param name="arrX">x散点序列</param>/// <param name="arrY">y散点序列</param>/// <param name="n">拟合曲线次数</param>/// <returns></returns>protected double[] GetXPowYSum(double[] arrX, double[] arrY, int n) {int m = arrX.Length;//X散点的个数double[] xyPow = new double[n + 1]; //仓储X散点的幂次值for (int i = 0; i < xyPow.Length; i++){//计算xy的i次方和double max = 0;for (int j = 0; j < m; j++){if (arrX[j] == 0)max = max + 1;elsemax = max + Math.Pow(arrX[j], i) * arrY[j];}xyPow[i] =Math.Round( max,4);}return xyPow;}/// <summary>/// 获取高斯矩阵(增广矩阵)/// </summary>/// <param name="arrX">X的幂次和</param>/// <param name="arrXY">XY的幂次和</param>/// <param name="n">拟合曲线次数</param>/// <returns></returns>protected double[,] GetGauss(double[] arrX, double[] arrXY, int n) {double[,] gauss = new double[n+1, n + 2];for (int i = 0; i < n + 1; i++){int j;int m = i;for (j = 0; j < n + 1; j++){gauss[i, j] = arrX[m];m++;}gauss[i,j] = arrXY[i];}return gauss;}/// <summary>/// 求解拟合曲线的系数/// </summary>/// <param name="gauss">线性方程的增广矩阵</param>/// <param name="n">方程次数</param>/// <returns></returns>protected double[] ComputeGauss(double[,] gauss, int n){double[] a = new double[n + 1];double s;int matrixLine = n + 1;for (int i = 0; i < n + 1; i++)a[i] = 0;//循环每列for (int j = 0; j < matrixLine; j++){//每列J行以后的绝对值最大值double max = 0;int k = j;for (int i = j; i < matrixLine; i++){if (Math.Abs(gauss[i, j]) > max){max = gauss[i, j];k = i;}}//判断j行否为最大值行若不是将j行调换为最大值行if (k != j){double temp;for (int m = j; m < matrixLine+1; m++){temp = gauss[j, m];gauss[j, m] = gauss[k, m];gauss[k, m] = temp;}}if (max == 0){//奇异矩阵无解return a;}//进行初等行变换得到上三角矩阵for (int i = j + 1; i < matrixLine; i++){s = gauss[i, j];for (int m = j; m < matrixLine + 1; m++){gauss[i, m] =Math.Round( gauss[i, m] - gauss[j, m] * s / gauss[j, j],6); }}}//根据倒推方式一次计算现行方程的解for (int i = matrixLine - 1; i >= 0; i--){s = 0;for (int j = i + 1; j < matrixLine; j++){s += gauss[i, j] * a[j];}a[i] =Math.Round( (gauss[i, matrixLine] - s) / gauss[i, i],6);}//返回方程的解即拟合曲线的系数return a;}}。
c++最小二乘法多项式拟合

c++最小二乘法多项式拟合C++是一种流行的编程语言,它提供了丰富的库和工具,可以用于实现最小二乘法多项式拟合。
最小二乘法是一种常见的数据拟合方法,它通过最小化观测数据与拟合函数之间的残差平方和来确定最佳拟合曲线。
在C++中,可以使用数值计算库(如Eigen、GSL等)来实现最小二乘法多项式拟合。
以下是一个基本的步骤指南:1. 导入所需的库和头文件。
例如,使用Eigen库进行矩阵计算: cpp.#include <Eigen/Dense>。
2. 准备输入数据。
将观测数据存储在一个二维矩阵中,其中每一行表示一个数据点的坐标(x,y)。
可以使用Eigen库的Matrix类来定义和操作矩阵:cpp.Eigen::Matrix<double, Eigen::Dynamic, 2> data;3. 构建设计矩阵。
设计矩阵是一个包含多项式的基函数的矩阵,用于拟合数据。
对于多项式拟合,可以选择一组多项式作为基函数,例如一次、二次或高阶多项式。
设计矩阵的每一列都对应于一个基函数的计算结果。
可以使用Eigen库的Matrix类来定义和操作设计矩阵:cpp.Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> designMatrix;4. 使用观测数据填充设计矩阵。
对于每个数据点,计算并填充设计矩阵的对应行:cpp.for (int i = 0; i < data.rows(); ++i) {。
double x = data(i, 0);designMatrix.row(i) << 1, x, xx, ...; // 根据选择的多项式阶数填充基函数结果。
}。
5. 使用最小二乘法求解拟合参数。
通过求解线性方程组,可以得到最佳拟合参数。
可以使用Eigen库的LeastSquaresSolver类来求解:cpp.Eigen::VectorXd parameters =designMatrix.colPivHouseholderQr().solve(data.col(1));6. 得到拟合的多项式函数。
c++最小二乘法二次多项式拟合

c++最小二乘法二次多项式拟合最小二乘法是一种常用的曲线拟合方法,可以用于拟合二次多项式。
以下是用C++实现最小二乘法二次多项式拟合的示例代码:#include <iostream>#include <vector>#include <cmath>using namespace std;// 定义二次多项式拟合的函数void quadraticLeastSquaresFit(const vector<double>& x, const vector<double>& y, double& a, double& b, double& c){int n = x.size();// 定义矩阵A和向量Bdouble A[3][3] = {0};double B[3] = {0};// 构造矩阵A和向量Bfor(int i=0; i<n; i++){double xi = x[i];double yi = y[i];A[0][0] += xi * xi;A[0][1] += xi;A[0][2] += 1.0;A[1][1] += xi;A[1][2] += 1.0;A[2][2] += 1.0;B[0] += xi * yi;B[1] += yi;B[2] += 1.0;}// 求解线性方程组Ax = Bdouble detA = A[0][0] * (A[1][1] * A[2][2] - A[2][1] * A[1][2])- A[0][1] * (A[1][0] * A[2][2] - A[2][0] * A[1][2])+ A[0][2] * (A[1][0] * A[2][1] - A[2][0] * A[1][1]);double invA[3][3] = {0};// 计算矩阵A的逆矩阵invA[0][0] = (A[1][1] * A[2][2] - A[1][2] * A[2][1]) / detA;invA[0][1] = -(A[0][1] * A[2][2] - A[0][2] * A[2][1]) / detA;invA[0][2] = (A[0][1] * A[1][2] - A[0][2] * A[1][1]) / detA;invA[1][0] = -(A[1][0] * A[2][2] - A[1][2] * A[2][0]) / detA;invA[1][1] = (A[0][0] * A[2][2] - A[0][2] * A[2][0]) / detA;invA[1][2] = -(A[0][0] * A[1][2] - A[0][2] * A[1][0]) / detA;invA[2][0] = (A[1][0] * A[2][1] - A[1][1] * A[2][0]) / detA;invA[2][1] = -(A[0][0] * A[2][1] - A[0][1] * A[2][0]) /detA;invA[2][2] = (A[0][0] * A[1][1] - A[0][1] * A[1][0]) / detA;// 计算拟合的系数a、b和ca = invA[0][0] * B[0] + invA[0][1] * B[1] + invA[0][2] * B[2];b = invA[1][0] * B[0] + invA[1][1] * B[1] + invA[1][2] * B[2];c = invA[2][0] * B[0] + invA[2][1] * B[1] + invA[2][2] * B[2];}int main(){// 定义数据点的x和y值vector<double> x = {1.0, 2.0, 3.0, 4.0, 5.0};vector<double> y = {1.8, 2.9, 3.9, 5.1, 6.2};// 定义拟合的系数a、b和cdouble a, b, c;// 进行二次多项式拟合quadraticLeastSquaresFit(x, y, a, b, c);// 输出拟合结果cout << "拟合的二次多项式为:y = " << a << "x^2 + " << b << "x + " << c << endl;return 0;}此代码将给定的数据点进行二次多项式拟合,通过最小二乘法求解拟合的系数a、b和c,并输出拟合结果。
数值分析论文--曲线拟合的最小二乘法
曲线拟合的最小二乘法姓名:学号:专业:材料工程学院:材料科学与工程学院科目:数值分析曲线拟合的最小二乘法一、目的和意义在物理实验中经常要观测两个有函数关系的物理量。
根据两个量的许多组观测数据来确定它们的函数曲线,这就是实验数据处理中的曲线拟合问题。
这类问题通常有两种情况:一种是两个观测量x 与y 之间的函数形式已知,但一些参数未知,需要确定未知参数的最佳估计值;另一种是x 与y 之间的函数形式还不知道,需要找出它们之间的经验公式。
后一种情况常假设x 与y 之间的关系是一个待定的多项式,多项式系数就是待定的未知参数,从而可采用类似于前一种情况的处理方法。
在两个观测量中,往往总有一个量精度比另一个高得多,为简单起见把精度较高的观测量看作没有误差,并把这个观测量选作 x,而把所有的误差只认为是y的误差。
设 x 和 y 的函数关系由理论公式y=f(x;c1,c2,……cm)(0-0-1)给出,其中 c1,c2,……cm 是 m 个要通过实验确定的参数。
对于每组观测数据(xi,yi)i=1,2,……,N。
都对应于xy 平面上一个点。
若不存在测量误差,则这些数据点都准确落在理论曲线上。
只要选取 m 组测量值代入式(0-0-1),便得到方程组yi = f (x ;c1 ,c2 ,……cm)(0-0-2)式中 i=1,2,……,m.求 m 个方程的联立解即得 m 个参数的数值。
显然N<m 时,参数不能确定。
y 2 y 在 N>m 的情况下,式(0-0-2)成为矛盾方程组,不能直接用解方程的方法求得 m 个参数值,只能用曲线拟合的方法来处理。
设测量中不存在着系统误差,或者说已经修正,则 y 的观测值 yi 围绕着期望值 <f (x ;c1,c2,……cm)> 摆 动,其分布为正态分布,则 yi 的概率密度为p y i1 exp,式中i是分布的标准误差。
为简便起见,下面用 C 代表(c1,c2,……cm )。
最小二乘法一阶线性拟合二阶曲线拟合的C语言程序实现
当 n=1 时,为 1 阶拟合,又称直线拟合,即系数矩阵是一个 2*2 的矩阵,通过线性方程的求解运 算,求得线性回归方程的系数表达式为:
当 n=2 时,为 2 阶曲线拟合,所得到的系数矩阵是一个 3*3 的矩阵【用 aij(i,j=1,2,……)的 形式表达】 ,通过线性方程的求解运算,求得线性回归方程的系数表达式为:
一、最小二乘法原理与计算方法
对于 m 组测量数据,选取
( x) a0 a1 x a2 x 2
an x n 进行 n 阶拟合,按
照残差平方和最小原则,对各个待二乘的法方程为 运算式如下,求解这个线性方程组就可以得出各个系数的值。
二、1 阶 2 阶拟合功能子函数和计算表达式
通过分析以上系数计算式中各项计算式,写出全部需要用到的子函数:
通过对照系数表达式里各个项的计算表达,写入主函数进行拟合计算。设定输入的数据格式为(x[ i ],y[ i ]) ,用 户输入数据的个数为 c,计算表达式程序代码如下: 1 阶直线拟合:
2 阶曲线拟合:
三、主函数代码
四、用 MATLAB 验证程序的运行结果
第一组:选择 y=x+1 进行线性拟合检验,可见 2 阶拟合对于线性关系,二次项系数为 0
第二组:选择 y=x^2+1 进行 2 阶曲线拟合检验
第三组:进行常规数据组检验
数据输入部分的设计参考了[物理实验计算器.
Zhouzb .
zhouzb889@]的部分代码,在此表示感谢。
m 1 i 1 m xi i 1 m x n i i 1
x
i 1 m
m
i
x
i 1
2 i
x
i 1
c++ 最小二乘法拟合三次曲线

很高兴接到你的委托,让我来为你撰写一篇关于C++最小二乘法拟合三次曲线的文章。
这是一个非常有趣和具有挑战性的主题,我将按照你的要求,以深度和广度兼具的方式来进行全面评估,并据此撰写一篇有价值的文章。
C++作为一种高级编程语言,广泛应用于科学计算和工程领域。
而最小二乘法则是一种常用的数学方法,用于拟合数据点,并找到最符合这些数据点的曲线方程。
在C++中,结合最小二乘法进行三次曲线拟合,可以帮助我们更好地理解数据之间的关系,从而进行更准确的预测和分析。
让我们来了解一下最小二乘法的基本原理。
最小二乘法是一种通过最小化数据点与拟合曲线之间的距离来确定曲线参数的方法。
在三次曲线拟合中,我们需要找到一个三次多项式方程,使得该方程与数据点的残差平方和最小。
在C++中,我们可以利用数值计算库如Eigen或者使用第三方库如GSL来实现最小二乘法的计算,从而得到拟合的三次曲线方程。
让我们来探讨C++中如何实现最小二乘法拟合三次曲线的具体步骤。
我们需要准备好需要拟合的数据点,这些数据点可以来自于实验测量、观测数据等。
我们需要定义一个三次多项式的模型函数,并初始化该函数的参数。
我们可以利用最小二乘法的公式,计算出最优的参数值,从而得到拟合的三次曲线方程。
我们可以通过绘图库如Matplotlib或者gnuplot来将拟合的曲线与原始数据点进行可视化比较,以验证拟合效果的好坏。
在完成了以上步骤后,我们可以对C++最小二乘法拟合三次曲线的实现进行总结和回顾。
通过本文的介绍,我们不仅深入了解了最小二乘法的原理和C++中的实现方法,还学会了如何利用C++进行数据拟合和分析。
在实际应用中,我们可以将这些知识运用到科学研究、工程设计和数据分析等领域,从而更好地理解数据的特性,并进行更精准的预测和分析。
我想共享一下我对C++最小二乘法拟合三次曲线的个人观点和理解。
作为一名编程人员,我认为掌握最小二乘法和C++编程技能是非常重要的,因为这可以帮助我们更好地处理和分析实际数据,从而做出更为准确的决策。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课题八曲线拟合的最小二乘法
实验目标:
在某冶炼过程中,通过实验检测得到含碳量与时间关系的数据如下,试求含碳量y与时间t
#include<iostream>
#include<>
using namespace std;
int Array(double ***Arr, int n){
double **p;
int i;
p=(double **)malloc(n*sizeof(double *));
if(!p)return 0;
for(i=0;i<n;i++)
{
p[i]=(double *)malloc(n*sizeof(double));
if(!p[i])return 0;
}
*Arr=p;
return 1;
}
void main(){
int n,i,j,k;
double **A,*B,*S;
S=new double[3];
B=new double[3];
cout<<"共2有®DN个节¨²点Ì:êo";
cin>>n;
cout<<"请输º入¨节¨²点Ì值¦Ì(ꡧXi)ê:êo"<<endl;
double *X;
X = new double[n];
for(i=0;i<n;i++){
cin>>X[i];
}
cout<<"请输º入¨节¨²点Ì函¡¥数ºy值¦Ì(ꡧYi)ê:êo"<<endl;
double *Y;
Y = new double[n];
for(i=0;i<n;i++){
cin>>Y[i];
}
if(!Array(&A,3))
cout<<"内¨²存ä分¤配失º¡ì败㨹!ê";
else
{
for(i=0;i<3;i++){
for(j=0;j<3;j++){
A[i][j]=0;
}
}
for(i=0;i<n;i++){
A[0][0]+=1;// cout<<A[0][0];
A[0][1]+=X[i];
A[0][2]+=X[i]*X[i];
A[1][0]=A[0][1];
A[1][1]=A[0][2];
A[1][2]+=X[i]*X[i]*X[i];
A[2][0]=A[0][2];
A[2][1]=A[1][2];
A[2][2]+=X[i]*X[i]*X[i]*X[i];
}
}
for(i=0;i<3;i++){
B[i]=0;
}
for(i=0;i<n;i++){
B[0]+=Y[i];
B[1]+=X[i]*Y[i];
B[2]+=X[i]*X[i]*Y[i];
}
for( k = 0; k < 2 ;k++)
{
for(i = k+1; i<3; i++)
{
double T = A[i][k]/A[k][k];
B[i] = B[i] - T * B[k];
for ( j = k+1 ; j < 3 ; j++ )
{
A[i][j] = A[i][j] - T * A[k][j];
}
}
}
S[2] = B[2]/A[2][2];
for (i = 1; i >=0 ; i--)
{
double Temp = 0;
for (int j = i+1; j<2 ;j++)
Temp = Temp + A[i][j] * S[j];
S[i] = (B[i] - Temp) /A[i][i];
}
cout<<"拟a合曲¨²线为a:êo"<<endl;
cout<<"y="<<S[0]<<" + "<<S[1]<<" x +
"<<S[2]<<" x^2 "<<endl<<endl
<<"误¨®差为a:êo"<<endl;
for(i=0;i<n;i++){
cout<<"Y"<<i<<"-Y(t"<<i<<")="<<S[0]+S[i]*X[i ]+S[2]*X[i]*X[i]-Y[i]<<endl;
}
}。