06第六章 线性系统的校正方法4
自动控制原理第六章线性系统的校正方法

对数幅频特性曲线如下图
16
10 3) 预选Gc(s)=τs+1,则 Gk ( s ) = (τs + 1) s ( s + 1)
′ 要求τ使系统满足 γ ′′ 和 ω c′ 的要求。 ′ 选择 ω c′=4.4dB/dec,求τ,则:
" L( wc ) = 20 lg 10 − 20 lg 4.4 − 20 lg 4.4 + 20 lg 4.4τ
1 / 2T 则 Gk ( s ) = s (Ts + 1)
其相频特性为: ϕ (ω ) = −90o − arctan Tω
1 = 63.5o γ (ωc ) = 180 + ϕ (ωc ) = 180 − 90 − arctan T ⋅ 2T
o o o
h=∞
21
∴由 ξ = 0.707 得性能指标为:
2
N R E
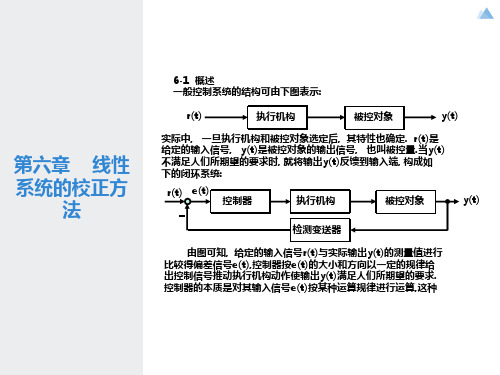
串联 校正 控制器 对象
已知被控对象数学模型 G p (s),即根据生产要求而 得到的系统数学模型,称为 固有部分数学模型,在工程 实际中是不能改变的。
C
反馈 校正
根据固有数学模型和性能要求进行分析,若现有闭环情况 下没有满足的性能指标或部分没有满足要求的性能指标,则人 为的在固有数学模型基础上,另加一些环节,使系统全面满足 性能指标要求,这个方法或过程称为校正,也称为系统设计。 所附加的环节被称为控制器,其物理装置称为校正装置。 通常记为Gc(s)
2 2 典型二阶系统可表示为: ωn ωn Φ(s) = 2 Gk ( s) = 2 s ( s + 2ξω n ) s + 2ξω n s + ω n
ξ
19
2 ωn C ( jω ) Φ ( jω ) = = =1 2 2 R ( jω ) ( jω ) + 2ξωn ⋅ jω + ωn 2 ωn
第六章线性系统的校正方法

4
第六章线性系统的校正方法
本章要求 :
1、了解系统校正方式的结构和基本控制规律; 2、掌握常用校正装臵的频率特性及其作用; 3、掌握选择校正装臵的方法; 4、重点掌握串联校正设计方法; 5、掌握反馈校正、复合校正的设计方法; 6、掌握指标验证的方法。
5
一、系统的设计与校正问题
本节主要内容:
1、控制系统的性能指标。 2、系统带宽的确定 3、校正方式 4、基本控制规律
17
一、系统的设计与校正问题(12)
4 比例-积分( PI ) 控制规律 具有比例-积分控制规律的控制器,称PⅠ控制器。
m(t ) K p e(t ) Kp Ti
t
i
e(t )dt
式中,K p 为可调比例系数; Ti 为可调积分时间常数。 在串联校正时,PⅠ控制器相当于增加了一个位于原点的开环 极点,同时也增加了一个位于s左半平面的开环零点。位于原 点的极点可以提高系统的型别,以消除或减小系统的稳态误 差,改善系统的稳态性能;而增加的负实零点则用来减小系 统的阻尼程度,缓和PⅠ控制器极点对系统稳定性及记过程产 生的不得影响。
n 1 2
(a)
Gr ( s ) R( s) E (s) C (s)
G1 ( s )
G2 ( s )
(b)
14
一、系统的设计与校正问题 (9)
6-1-4 基本控制规律 1 比例 ( P )控制规律 具有比例控制规律的控制器,称为P控制器,如图所示。 其中 K p 称为P控制器增益。 P控制器实质上是一个具有 可调增益的放大器。在串 联校正中,加大控制器增 益,可以提高系统的开环 增益,减小系统稳态误差,提高系统的控制精度,但会降 低系统的相对稳定性,甚至造成闭环系统不稳定。因此, 在系统校正设计中2
第六章线性系统的校正方法
第六章线性系统的校正方法第六章线性系统的校正方法一、教学目的与要求:通过对本章内容的讲述,要让学生懂得校正的目的,校正的基本方式。
掌握控制系统的基本控制规律,常用校正装置的特点与功能,串联超前、滞后、滞后- 超前校正的设计步骤。
关键是通过这些知识的学习,将前面几章的内容综合起来加以运用,本章知识是在实际应用中的指导思想。
二、授课主要内容:1.系统的设计与校正问题1)性能指标2)校正方式3)基本控制规律2.常用校正装置及其特性1)无源校正装置2)有源校正装置3.串联校正1)串联超前校正2)串联滞后校正3)串联滞后—超前校正(详细内容见讲稿)三、重点、难点及对学生的要求(掌握、熟悉、了解、自学)(1)重点掌握的内容1)掌握用解析法设计一阶、二阶串联校正装置的方法。
2)掌握本书介绍的两大类利用Bode 图设计串级校正装置的频率域方法。
3)掌握本书中介绍的前馈校正装置(包括前置滤波器)的设计方法。
(2)一般掌握的内容1)掌握用解析法设计串联PID 控制器的方法。
2)掌握用解析法设计并联校正装置的方法。
(3)一般了解的内容1)了解校正的四大方式及其作用。
2)了解校正装置的RC 网络实现的物理构成。
3)了解解析法设计一般二次校正装置的思想。
4)了解频率域与时域指标间的互换公式。
四、主要外语词汇性能指标performance specification 校正方式compensation mode 基本控制规律basic control rule 串联校正series compensation 反馈校正feedbackcompensation 超前校正lead compensation 滞后校正lag compensation 超前-滞后校正lag-lead compensation 复合校正complex compensation五、辅助教学情况(见课件)六、复习思考题1. 什么是控制系统的校正?什么是串联校正方式?校正装置的选取原则是什么?2. 简述串联校正方式中调节器的设计方法并说明各设计方法的特点?3. 比例微分控制规律对改变系统的性能有什么作用?4. 比例积分控制规律对改变系统的性能有什么作用?5. Kc、Ti 及Td 改变后对系统控制质量的影响如何?6. 分析积分作用的强弱,对系统有何影响?7. 将PID 环节中的微分部分改为不完全微分形式,曲线形状如何?七、参考教材(资料)1.《自动控制理论与设计》曹柱中徐薇莉编上海交通大学出版社2.《自动控制原理》翁思义杨平编著中国电力出版社参考两书第六章有关内容。
线性系统的校正方法

第六章 线性系统的校正方法 校正装置接入系统的形式主要有两种: (1)校正装置与系统原有部分相串联, 如图6-1(a)所示, 这种校正方式称为串联校正; (2)从系统原有部分引出反馈信号, 与原有部分或其一部 分构成局部反馈回路, 并在局部反馈回路内设置校正装置,这 种校正方式称为反馈校正或并联校正, 如图6-1(b)所示。 为提高性能, 也常采用如图6-1(c)所示的串联反馈校正。 图6-1(d)所示的称为前馈补偿或前馈校正。在此, 反馈控制与 前馈控制并用, 所以也称为复合控制系统。
式中β=(R1+R2)/R2>1, T=R2C。 相位迟后校正装置的频率特性为 1 + jTω Gc ( jω ) = 1 + jβTω 其伯德图如图6-8所示,
1 + jαTω Gc ( jω ) = 1 + jTω
其伯德图如图6-6所示,其幅频特性具有正斜率段, 相频特 性具有正相移。正相移表明, 校正网络在正弦信号作用下的正 弦稳态输出信号, 在相位上超前于输入信号, 所以称为超前校 正装置或超前网络。
第六章 线性系统的校正方法
L(ω ) / dB
20dB/dec 20lgα
第六章 线性系统的校正方法 4. 比例-积分 比例-积分(PI)控制规律 控制规律 控制规律 具有比例-积分控制规律的控制器, 称为比例-积分(PI)控制 器。则图6-2中的Gc(s)=Kp[1+1/(Tis)], Ti 为积分时间常数。 串联校正中, PI控制器相当于在系统中增加一个位于原点的 开环极点, 同时也增加了一个位于s左半平面的开环零点。增加 的极点可以提高系统的型别,以消除或减小系统的稳态误差, 改 善系统稳态性能; 而增加的负实零点则用来减小系统的阻尼程度, 缓和PI控制器极点对系统稳定性及动态过程产生的不利影响。 只 要积分时间常数Ti足够大, PI控制器对系统稳定性的不利影响可 大为减弱。在实际控制系统中, PI控制器主要用来改善系统稳态 性能。
西工大、西交大自动控制原理 第六章 线性系统的校正方法_04_反馈校正1231

,即:G2(s)G3(s) 1
则:E(s) 0 。完全消除了由输入信号 r(t) 引起的误差。
此时称为完全补偿。
复合控制不改变系统的稳定性(加入顺馈不改变系统的 闭环特征方程式),很好地解决了提高精度和稳定性之 间的矛盾。
二、对干扰信号的复合控制
要减小或消除由干扰信号引起的系统的稳态误差, 可采用如图所示的复合控制:
1800 900 86.90 82.40 56.30 43.30 故小闭环(内回路)稳定; 再计算小闭环(内回路)在ωc=13处的幅值:
20lg 2.86c 18.9db
0.25c 0.1c
满足 |G2Gc|>>1
(5)求反馈校正装置的传递函数Gc(s) 在求出的G2(s)Gc(s)中,代入已知的
G3 (s)
F (s)
R(s) E(s)
G1 (s)
G2 (s) C(s)
R(s) 0
C
f
(s)
E(s)
[1
G1 1
( s)G3 ( s)]G2 G1(s)G2 (s)
(
s)
F
(s)
不加补偿环节 G3(s) 时,
C
f
(
s)
E(s)
1
G2 ( s) G1 ( s )G2
(
s)
F
(
s)
显然,加入补偿环节 G3(s) 后,系统误差 e f (s) 减小了。
一、对输入信号的复合控制
要减小或消除由输入信号引起的系统稳态误差,可 以采用如下图所示的复合控制:
G3 (s)
R(s)
E(s) G1 (s)
G2 (s) C(s)
其中 G3(s) 为补偿环节。
线性系统的校正方法《自动控制原理》
(1) 反向端输入的有源调节器
反向端输入有源调节器的电路如下图:
图中:
是输入阻容网络的等效阻抗,
是反馈阻容网络的等效
阻抗, 传递函数为:
用不同的阻容网络构成
﹑
就可得到不同的调节规律. 可见教材
P.233表6-2典型的有源调节器. (2) 同向端输入的有源调节器 同向端输入有源调节器的电路 如右图:
设
产生一个小偏差
, 则
变为
, 其相对增量为:
, 采用位置反馈后, 变化前的传递系数为
变化后的增量
, 其相对增量为:
2. 复合控制 工程实际中的系统往往受各种干扰的影响, 当控制系统对在 干扰影响的动静态性能提出很高要求时, 单纯用反馈控制一般难 以满足要求, 此时可考虑采用复合控制的手段. 下面简要介绍针 对干扰作用下的复合控制的方法和特点.
4
特性法设计系统, 都是通过闭环系统的开环特性进行的, 用对数
5
频率特性法设计系统, 就需通过闭环系统的开环对数频率特性进
6
行设计. 下面还是通过具体例子加以说明.
7
6-3 串联校正
例1 设单位负反馈系统的开环传递函数为:
若要求系统的速度误差系数KV =20, 相角裕量
,幅
值裕量
, 试设计串联超前校正装置.
解: (1)确定系统的开环放大倍数.并画开环对数幅频特性曲线
2.串联超前校正
分析当K=20时, 原系统是否满足动态要求.
由于超前网络的放大倍数为
态误差系数降低, 故需再串接一放大倍数为
由上计算可知, 原系统当K=20时, 闭环虽稳定, 但相角裕量仅为 18度, 将会有较大的超调, 不满足相角裕量大于等于50度的动态 要求, 可采用串联超前网络给以校正. 设计网络参数超前网络的传递函数为:
线性系统的校正方法

-5
-10
20 lg b
m
1 T b
-15
-20 -1 10
10
0
0
1 T
10
1
1 bT
10
2
1 b m arcsin 1 b
-10 -20 -30 -40 -50 -60 -1 10
0 1 2
m
10
m
10
10
3.滞后-超前网络
C1 R1
网络的传函:
(1 R1C1s)(1 R2C2 s) Gc ( s) (1 R1C1s)(1 R2C2 s) R1C2 s
如果输入信号的带宽为 则系统带宽频率
0 ~ M
b (5 ~ 10)M
dB 0 0.707 ( j 0) 3
( j 0)
L()
( j)
3
带宽
b
输入 信号
R( j) N ( j)
噪声
0
M
1
n
图6-1 系统带宽的选择
三、校正方式(按照校正装置在系统中的连接 方式)
m
1 T
φm
滞后网络对数坐标图
二、有源校正网络
实际控制系统中无源校正网络被广泛采 用,但由于负载效应问题和复杂网络设计与 调整困难问题,有时采用有源校正网络对系 统进行校正,把无源网络接在运算放大器的 反馈通路中,就构成有源校正网络。
超前 滞后
滞后-超前网络的零、极点分布
1 1 T 1 T 1
1 bT2
1 T2
0
j
超前
滞后
{
{
二、有源校正装置
Z1 Z2
A
第六章 线性系统的校正方法-自动控制原理(双语教材)(第2版)-摆玉龙-清华大学出版社

6.1 引言
在工程实际中需要设计一个自动控制系统,这种设计
过程一般经过以下三步:
(1)根据任务要求,选定控制对象; (2)根据性能指标的要求,确定系统的控制规律,并设 计出满足这个控制规律的控制器,初步选定构成控制器的
元器件;
(3)将选定的控制器与被控对象组成一个控制系统,如 果构成的系统不能满足或不能全部满足设计要求的性能指
10
6.2 系统校正的基本概念
『Terms and Concepts』 Design is the process of conceiving or inventing the forms,
parts, and details of a system to achieve a specified purpose. Specifications: Statement that explicitly state what the device or product is to be and to do. It is a set of prescribed performance criteria.
8
6.1 引言
Commonly a two port electric network can serve as a compensator in many control systems. Several types of compensation schemes are available of which the lead and lag networks are the most widely used. Root locus method can be used for the synthesis of the compensator transfer function.
第六章 线性系统的校正方法

1 Mr sin
, %
c , t s
k ts
c
k 2 1.5 M r 1) 2.5 M r 1)2 ( (
2)稳态性能指标
L()
26 20 6 10 [-20]
G (s )H (s )
K ( is 1) s (Tjs 1)
Gc (s)G0 (s)H(s)
()
90
c t s % 快速性 稳定性
m
90 180
m
L()
40 20 0.1 -20 1
m c
L() L() Lc () L() 10 lg 0 c c c c
G0 (s)H(s)
Gc (s)G0 (s)H(s)
()
90
m
90 180
m
2、无源滞后校正
1 bTs G c (s ) 1 Ts
b 1
1 bTs G c (s ) 1 Ts
Bode图为:
L( )
b 1
有 m
1 T b
0
1 T
[-40]
90
180
90 arctan arctan 0.45 arctan 0.11 c c c 49.9 50 h
L()
[-20] 40 20 0.1 -20 1 [-80] 10
m ( 5) m
0
Gc (s)G0 (s)H(s)
m
1 T
1)设计步骤(对相角裕度提出要求)
, , h(dB ) c
自动控制原理第六章线性系统的校正方法

5 • 20 •c • 6 •c 1 c •1• • 200 •cc
c 3rad s
230
验算指标(相角裕度) c 2.1rad s
(20j 1)(6j 1) • 5
1
(200j 1)(0.3j 1)j(j 1)(0.25j 1)
180 0+(c)
(2)画出未校正系统的伯德图,计算未校正系统的
相角裕度和截止频率。
(3)根据设计要求,确定期望相角裕度和截止频率。
Mr
1
sin
,
350 900
超调量 0.16 0.4(Mr 1), 1 Mr 1.8
调节时间
ts
K c
K 2 1.5(M r 1) 2.5(M r 1)2
超调量 0.3 0.16 0.4( 1 1) , 1 1.35 460
装置:
(1)
Kv
70
1 s
(2)
ts 0.1S
(3) % 30%
解(1) 根据I型系统和速度误差系统要求取:K=70
G( j)
70
j(0.12 j 1)(0.02 j 1)
70
exp j 90 tg-10.12 tg-10.02
(0.12)2 1 (0.02)2 1
(2)绘制未校正系统的伯德图,如图红线所示。由图可知
1
2
1 10
1.35 1.35
= 1
1 2.6
,
2=2
rad s
1 1 1.35 = 1 ,
3 10 1.35 1 17.4
3
20
ra
d s
L( )dB
60
40 20 0 0.1 -20
-20
LLc () -40
第6章线性系统的校正方法

① 闭环带宽要求较高. 若已校正系统带宽过大, 使得通过 系统的高频噪声电平很高, 不符合对系统的性能要求 .
② 对截止频率附近相角迅速减小的待校正系统, 不宜采用 串联超前校正. 因为很难提供足够的相角超前量. 此时可考虑 两个或两个以上串联校正网络由隔离放大器串联在一起使用.
图6-2 串联校正与反馈校正
前馈校正又称顺馈校正, 是在系统主反馈回路之外采用的 校正方式.前馈校正装置接在系统给定值(或指令、参考输入信 号)之后, 主反馈作用点之前的前向通道上, 如图(a)所示.
(a)
另一种前馈校正装置接在系统可测扰动作用点与误差测 量点之间, 对扰动信号进行测量,并经变换后接入系统,形成一 条附加的对扰动影响进行曲补偿的通道, 如图(b)所示.
由
最大超前角为 m arctgaTm arctgTm
根据三角函数两角求和公式 仅与a有关, 一般a≤20.
m处的对数幅值为 Lm 20lg aGc ( jm) 10lg a
2 无源滞后网络 滞后网络传递函数为
式中分度系数 时间常数
传递函数与超前网络相似, 超前a>1, 滞后b<1
最大滞后角m发生在最大滞 后角频率m处, 且是1/T与1/bT 的几何中心. m及m分别为
为了使系统满足性能指标要求, 要对系统进行调整, 通常 首先调整系统开环增益值. 这是一种最简单的方法. 但是在多 数情况中, 仅改变增益仍有可能不满足给定性能指标的要求. 此时就需要在系统中引入称之为校正装置的附加装置.
所谓校正就是在系统中加入一些其参数可以根据需要而 改变的机构或装置,使系统整个特性发生变化,从而满足给 定的各项性能指标要求。
串联滞后校正设计的一般步骤.
线性系统的矫正方法
线性系统的校正方法>>系统的设计与校正问题
不同域中动态性能指标的表示及其转换 • 稳 定 性--是系统工作的前提, • 稳态特性--反映了系统稳定后的精度, • 动态特性--反映了系统响应的快速性。 • 人们追求的是稳定性强,稳态精度高,动态响应快。 • 不同域中的性能指标的形式又各不相同: • 1.时域指标:超调量σp、过渡过程时间t s、以及 • 峰值时间tp、上升时间tr等。 • 2.频域指标:(以对数频率特性为例) • ① 开环:剪切频率ωc、相位裕量r及增益裕量 Kg等。 • ②闭环:谐振峰值Mr、谐振频率ωr及带宽ωb等。
线性系统的校正方法>>系统的设计与校正问题
域 域 域
时
域
复
域
频
域
微分方程—分析法
传递函数—根轨迹法 闭环传递函数的极点 分布在s的左半平面, 则系统稳定。
频率特性—频率法
(开环Bode图为例)
稳 运动方程的特征根具 定 有负实部,则系统稳 性 定。 稳 态 由运动方程的系数 决定。 过渡过程时间: ts 最大超调量 : σP (及tr、tP、td、振 荡次数u等)。 ts越短,σP越小, 动态特性越好。
(s) (35 γ 90 ωc )
ts
Kπ
1 1 2 K 2 1 . 5 ( 1) 2.5( 1) (35 γ 90 ) sin sin γ
• 系统的动态性能主要取决于开环对数幅频特性的中 • 频段。
线性系统的校正方法>>系统的设计与校正问题
G ) c(s
Rs ()
N(s)
G ) 1(s
G ) 2(s
G ) c(s
自动控制 原理 第六章 线性系统的校正方法

如何解决: 在原系统中加入一些机构或装置
成都信息工程学院—控制工程系
自动控制原理
如:加入附加装置
R(s)
0.063s 1
0.0063s 1
第六章 线性系统校正方法
100
C(s)
s(0.1s 1)(0.01s 1)
正装置。
校正的本质: 改变系统的零、极点分布,即改变系统的根轨迹或频率特性
曲线的形状,达到改善系统性能的目的。
成都信息工程学院—控制工程系
自动控制原理
第六章 线性系统校正方法
6.1.3 校正中常用的性能指标
校正中常用的性能指标包括稳态精度、 稳定裕量以 及响应速度等。
(1) 稳态精度指标: 位置误差系数K p , 速度误差系
则:满足 ess= 0.01 γ = 37.1o
成都信息工程学院—控制工程系
自动控制原理
6.1.2 校正及其本质
第六章 线性系统校正方法
校正:
所谓校正,就是在系统中加入一些其参数可根据需要而改变 的机构或装置,使整个系统的特性发生变化,从而满足给定的各 项性能指标。
校正装置: 为了改善系统的动态、静态性能附加的这部分装置统称位校
第六章 线性系统校正方法
校正方法分类(3):
三、根据校正装置自身有无放大能力来看
无源校正装置:
自身无放大能力,通常由RC网络组成,在信号传递中,会 产生幅值衰减,且输入阻抗低,输出阻抗高,常需要引入附加的 放大器,补偿幅值衰减和进行阻抗匹配。
无源串联校正装置通常被安置在前向通道中能量较低的 部位上。
成都信息工程学院—控制工程系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
求交点 ω1 =
Km (Tcωc j + 1) Km (Tcωc j + 0) G(ωj)= ≈ =1 m ωc j (T1ωc j + 1)(T2ωc j + 1) ωc j(T1ωc j + 0)(0 + 1)
K mTcωc K mTc 400i0.1 = 1, T1 = = = 1( s ) ωcT1ωc ωc 40
R(S)
TmTc T2 = T1 T1 = −T2 +Tc +Tm + Kt KmTc
Km(TCS +1) C(S) S(T S +1)(T2S +1) 1
Km (Tc S +1) Km (Tc S +1) G(S) = = 2 S[TmTc S + (Tm +Tc + KmKtTc )S +1] S(T1S +1)(T2S +1)
s 400( + 1) 400(0.1s + 1) 10 Gm ( s ) = = s s ( s + 1)( + 1) s ( s + 1)(0.002s + 1) 500
= 1800 − 900 − arctan1 • 40 − arctan 0.002 • 40 + arctan 0.1 • 40 = 900 − 88.60 − 4.60 + 760 = 72.80 > 500
设计的主要思路是, 设计的主要思路是,根据设计指标确定预期开还传 递函数( ),然后确定参数 递函数(T1,T2,TC),然后确定参数 Kt。 1 T1 + T2 −Tc −Tm Kt ≈ Kt = 或者取 11 ωc KmTc
例6-6.设控制对象的开环传递函数为 设控制对象的开环传递函数为 试设计一反馈校正装置的结构和参数, 试设计一反馈校正装置的结构和参数, 使校正后系统的性能要求: 使校正后系统的性能要求: 相角裕度: 相角裕度: γ ′′ ≥ 50 ° 截止频率: ′ 截止频率:ω c′ ≥ 40 rad s
Km G (s) = S (T m S + 1) 400 = S ( 0 . 02 S + 1) 400 = 1 S ( 50 S + 1)
解:1 绘制未校正系统的伯德图,如图红线所示。 绘制未校正系统的伯德图,如图红线所示 红线所示。 由图可知未校正系统的截止频率和计算相角裕度为
′ ωc = 141 rad s
H
1 + KK H − KK = (1 + KK H )2
2
H
1 = (1 + KK ∆K • K
)2 H
H
)
,
∆K1 1 = K1 1 + KK
H
参数 K 变化量
∆ K 敏感性降低
1 1 + KK
倍
H
8
3.测速 超前网络反馈校正 测速-超前网络反馈校正 测速
采用反馈补偿的系统, 必然是多回路控制系统, 采用反馈补偿的系统 , 必然是多回路控制系统 , 反馈补偿的设计( 综合) 远比串联补偿的设计复杂。 反馈补偿的设计 ( 综合 ) 远比串联补偿的设计复杂 。 根据反馈补偿的功能和反馈具体形式, 可以通过试 根据反馈补偿的功能和反馈具体形式 , 凑法选择反馈补偿装置的结构和参数。 凑法选择反馈补偿装置的结构和参数。 由于串联补偿设计比反馈补偿设计容易,因此, 由于串联补偿设计比反馈补偿设计容易,因此, 在某种情况,如果预选定反馈补偿装置的结构, 在某种情况,如果预选定反馈补偿装置的结构,可 以把反馈补偿设计变换成串联补偿( 设计, 以把反馈补偿设计变换成串联补偿(滞-超)设计, 根据性能指标要求。确定等效串联补偿装置的参数, 根据性能指标要求。确定等效串联补偿装置的参数, 然后再确定反馈补偿装置的参数。 然后再确定反馈补偿装置的参数。 下面我们研究测速-超前网络反馈校正原理 下面我们研究测速 超前网络反馈校正原理
Tcω2 1 = T1 Tm
T1 1 ω2 = = = 500 TmTc 0.02 • 0.1
期望的开环对数幅频特性曲线中频段宽度 期望的开环对数幅频特性曲线中频段宽度 满足预期频率特性要求 h = 10, γ max = 550
hh= ωω2ωω1 = 50 > 10 = 2 1 = 50
15
γ m = 1800 + φ (ωc )
R(S)
1 K K1 KH S G(S) = = = K 1 1+ • KH S +1 TS +1 S KKH
K S
KH
C (S )
积分环节变为惯性环节, 积分环节变为惯性环节,这意味着降低了大回 路的稳态精度,但改善系统的平稳性。 路的稳态精度,但改善系统的平稳性。
3
K C (S ) 1 + KK H G(S ) = = T R( S ) S +1 KK H + 1
Km (Tc S +1) Gm (S) = S(T1S +1)(T2S +1)
取ωc = 40 rad s
ωtc = T1 = 10 rad s
c
在ω轴上 , 过ωc = 40 rad s 点作-20 dB dec 斜线, 在斜线 上, 1 过对应 = 10 rad s , , 的点, 向上作-40 dB dec 斜线,交于未校正 T2 系统于一点, 该点相应的频率为 ω1 =
KH
仍为振荡环节,增益和时间常数变小,阻尼系数也变小,改善 仍为振荡环节,增益和时间常数变小,阻尼系数也变小, 4 系统的平稳性。 系统的平稳性。
(2)速度反馈或称微分反馈,这种反馈补偿可以在不改变被包 速度反馈或称微分反馈, 围环节性质的条件下,增加时间常数,也可以改变阻尼比; 围环节性质的条件下,增加时间常数,也可以改变阻尼比;能改 善系统的平稳性。 善系统的平稳性。
6.3 反馈校正
PD控制器 与 局部微分反馈比较 控制器 主要作用: 主要作用:改善系统动态性能
反馈校正在控制系统中获得了广泛的应用。 反馈校正在控制系统中获得了广泛的应用。采用 反馈校正与串联校正具有同样的( 反馈校正与串联校正具有同样的(动态性能)校正效 此外更具有突出的优点: 果,此外更具有突出的优点: (1)可以减弱被反馈包围部分环节参数变化、非线性 可以减弱被反馈包围部分环节参数变化、 特性以及各种干扰对控制系统性能的不利影响。 特性以及各种干扰对控制系统性能的不利影响。 可以消除系统不可变部分中不希望的特性, (2)可以消除系统不可变部分中不希望的特性, 即取代不希望特性部分。 即取代不希望特性部分。 具有低通滤波作用(减少高频干扰的影响) (3)具有低通滤波作用(减少高频干扰的影响)。
L(ω )
ω1 =
1 T1
Lm = LLc
1 Tc
Lc (ω)
ω c′
ωc
ω′ =
1 T′
ω2 =
1 lg ω T2
ω rad s
Tm S 1 = H C ( s) = Kt S • Tm S + 1 Gm ( s)
13
′ 2绘制期望的开环对数幅频特性。γ ′′ ≥ 50 ° ω c′ ≥ 40 rad s 绘制期望的开环对数幅频特性。
R(S)
K TS +常数变小。但改善系统的平稳性。 仍为惯性环节,增益和时间常数变小。但改善系统的平稳性。
R(S) K 1 + KKH G(S ) = T2 2Tζ 2 S + S +1 KKH +1 KKH +1
K T 2 S 2 + 2TζS + 1
C (S )
K T 2S 2 + 2TζS +1
C (S )
Kt S
5
K 1 G(S) = • 1+ KKt S( T S +1) 1+ KKt
R(S)
K C (S ) S (TS + 1)
Kt S
仍含有积分环节和惯性环节,增益和时间常数变小。 仍含有积分环节和惯性环节,增益和时间常数变小。 (3)加速度反馈,这种反馈补偿可以在不改变被包围环节性质 加速度反馈, 的条件下,改变阻尼比,能改善系统的相对稳定性。 的条件下,改变阻尼比,能改善系统的相对稳定性。
2
1.利用反馈补偿改变局部结构参数 1.利用反馈补偿改变局部结构参数 (1)位置反馈或称比例反馈,这种反馈补偿可以减少被包围 位置反馈或称比例反馈, 环节的时间常数,能扩展频带,提高系统的快速性; 环节的时间常数,能扩展频带,提高系统的快速性;能改变积 分环节的性质,改善系统的平稳性。 分环节的性质,改善系统的平稳性。
GC ( s)
C ( s)
G0 ( s ) G (s) = 1 + G0 ( s )Gc ( s )
0 c
这表明反馈回路的传递函数等效为 如果所关心的对动态系统起主要作用的频率范围内选择结 构和参数, 构和参数,使 G ( jω )G ( jω ) >> 1
G ( jω ) ≈ G 则式(6.3.6)可近似表示为 ( jω ) 可近似表示为 则式
,
′ = 19.50 γ
400 400 ≈ =1 ωj (0.02ωj + 1) ωj (0.02ωj+0)
′ ωc = 141 rad s
,
′ γ ′ = 180° − 90° − tg −1ωc × 0.02=19.50
12
L(ω )dB
ω 0 = 1 rad s
,
L (1) = 20 lg 400 = 52
9
反馈形式是速度反馈后接超前相位网络(校正原理) 反馈形式是速度反馈后接超前相位网络(校正原理)
R (S )
Km S (Tm S + 1)