运动控制器常见规格问题(强烈推荐)
控制器的常见问题解答
控制器的常见问题解答1.什么是控制器?控制器是一种电子设备,用于管理和控制其他设备或系统的运行。
它接收输入信号,并根据预设的程序和条件执行相应的操作,以实现对设备或系统的控制和调节。
2.为什么我的控制器无法正常工作?控制器无法正常工作可能有以下几个原因:a) 供电问题:检查控制器的电源是否连接正确,电池是否放置良好,电压是否正常。
b) 连接问题:确保控制器与被控制设备之间的连接良好,信号线是否插紧。
c) 设置问题:检查控制器的设置是否正确,例如时间、温度、模式等参数设置是否符合要求。
d) 故障问题:如果以上都正常,可能是控制器本身出现故障,请联系专业维修人员进行检修。
3.如何解决控制器显示屏上的错误代码?错误代码显示在控制器的显示屏上,通常是警示用户某个问题的存在。
您可以通过查看控制器用户手册或相关的技术支持文档,找到与错误代码对应的解决方法。
常见的错误代码可能包括电池电量不足、传感器故障、通信错误等。
4.为什么控制器无法正确响应我的操作?如果您发现控制器没有正确响应您的操作,您可以尝试以下方法:a) 确保您按下操作按钮的时间和力度足够,有些按钮可能需要长按或重按才能生效。
b) 检查操作按钮是否损坏或卡住,有时候按钮会出现粘连或其他故障导致无法正常触发。
c) 重启控制器,将其重新启动可能有助于解决操作响应问题。
5.我应该如何维护和保养我的控制器?保持控制器的正常功能和延长使用寿命,您可以采取以下措施:a) 定期清洁控制器的表面和按钮,使用软布擦拭,避免使用有腐蚀性或溶剂性的清洁剂。
b) 避免将控制器暴露在过高或过低的温度环境中,以免影响其正常工作。
c) 注意避免控制器受到撞击或摔落,避免不必要的损坏。
d) 定期检查电池电量,并及时更换电池,确保控制器的供电正常。
总结:控制器作为一种重要的电子设备,在各个领域起到了关键的作用。
然而,常见问题的解答对于控制器的正常运行和维护具有重要意义。
通过了解控制器的工作原理、错误代码的含义以及常见的故障原因,我们可以更好地理解和解决相应的问题,提升控制器的使用效果和寿命。
运动控制器常见使用问题

1.CJ1W-NC213模块初次使用上电以后,模块报“6000”的错误? (2)2.新买来的CJ1W-NC213 模块和驱动器侧接好线后,PLC上电时,NC模块上的X、Y两个指示灯就在闪? (2)3.CJ1 系列的NC模块的公共参数区的设置及含义? (2)4.CS1W-NC/CJ1W-NC和C200HW-NC有什么区别? (3)5.CS1W-NC/CJ1W-NC模块如何实现原点搜索? (3)6. CS1W-NC/CJ1W-NC模块如何实现直接操作? (4)7.NC模块X轴如何做直接操作? (5)8.NC模块如何做内存操作? (5)9.NC模块的ERC错误灯点亮,如何处理? (6)10.MC模块控制伺服电机时伺服刚开始运行就报偏差计数器溢出错误,如何处理? (6)1.CJ1W-NC213模块初次使用上电以后,模块报“6000”的错误?“6000”错误是指紧急停止信号输入导致轴被停止。
因为外部急停信号是NC(常闭触点),由于客户初次使用并没有接外部急停信号,所以导致模块报“6000”错误,只要把急停信号接到A16和A20端子即可。
2.新买来的CJ1W-NC213 模块和驱动器侧接好线后,PLC上电时,NC模块上的X、Y两个指示灯就在闪?这是正常现象,因为还未设置公共参数。
只有设置公共参数后,这时就决定了轴参数,再断电上电,该指示灯就不会再闪烁。
调试NC模块时,如果模块出错,可以先查出错误代码,然后根据代码内容,确定出错的原因。
3.CJ1 系列的NC模块的公共参数区的设置及含义?公共参数区域的开始字:m=D20000+100*单元号,(单元号由NC模块前面板设置)。
在CPU单元的数据存储区域中分配给特殊IO单元的存储区被分配给公共参数,公共参数的解释及设置如下表:注意:在设置好公共参数后,这些参数将会在下一次NC模块上电或者重新启动时生效。
4.CS1W-NC/CJ1W-NC和C200HW-NC有什么区别?5.CS1W-NC/CJ1W-NC模块如何实现原点搜索?以CJ1W-NC113为例,单元号为0,伺服驱动器的脉冲输入方式为CW/CCW,外部使用原点接近信号(常开)和原点输入信号(常开)确立原点,要求原点搜索接近速度为5000pps,原点搜索高速度为10000pps,加减速时间为50。
PARKER6K2运动控制器数据通讯连接和故障解析
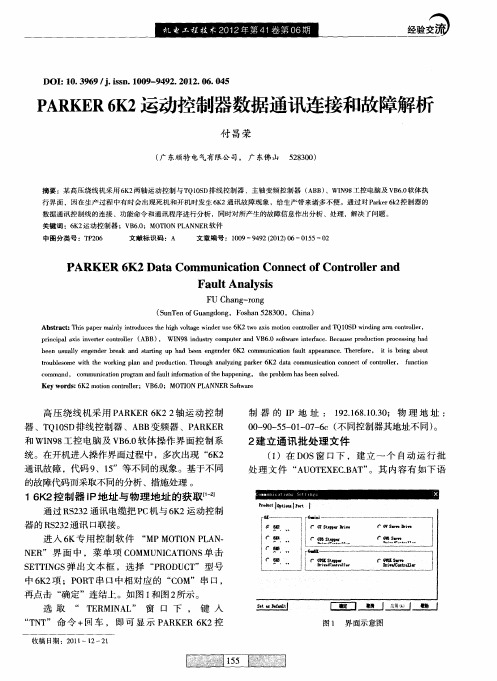
摘 要 : 高压绕线机采用 6 2 某 K 两轴运动控 制与T 1S  ̄线控 制器 、主轴变频控制器 ( B ) Q0D A B 、WI 9 控电脑及 V 6 软体执 N8 B. 0 行 界面 ,因在生产过程 中有时会出现死机 和开机时发生 6 2通讯故障现象 ,给生产 带来诸多不便 。通过对 P re 6 2 K a r k 控制器 的 k 数据通讯控制线的连接 、功能命令和通讯程序进行分析 ,同时对所 产生 的故障信 息作 出分析 、 处理 ,解决 了问题 。 关键 词 : K 运动控制器 ;V 6 ;M TO L N E 软件 62 B. 0 O I NP A N R
b e u ly e g n e r a n trig u a e n e d r 6 o e n us al n e d rb e k a d satn p h d be n e g n e K2 c mmu iain futa p aa c .T rfr nc t a l p e rn e heeoe, i i rn bo t o t sb g a u i to be o t h o kn ln a d p o u t n ru ls mewih te w r igp a n rd ci .Tho g n lzn a k r6 aa c mmu iain c n e to o tolr fn t n o r u h a ay igp r e K2 d t o n c t o n c fc nrle , u ci o o c mma d, c mmu iainp o a a dfutnomaino eh p e ig, tep o e h sb e ov d o n o nc to r ̄ m n a l ifr t ft a p nn o h h rblm a e nsle . Ke r s 6 t nc nrle ; VB60; M OT ON LANNER ot r ywo d : K2moi o tolr o . I P S fwae
问题与解答

ZL运动控制器常见问题与解答一、 安装好运动控制器后,主机不能启动或主机中其它硬件设备工作不正常答:按以下步骤检查:1、检查运动控制器有没有安装好,重新安装运动控制器,并开机。
仍不行,进入下一步;2、判断ISA/PCI总线接口是否损坏:(1)换其他ISA/PCI插槽重试;(2)换其他计算机重试;(3)换另一块运动控制器重试。
仍不行,进入下一步;3、对于ISA卡,确认是否地址冲突或中断冲突,重新设置基地址和中断,中断设置可参考《指令与编程》的“附录一ISA/PC104主机中断设置”;仍不行,进入下一步;4、与销售商或技术服务部门联系。
二、 主机与运动控制器通信出错答:按以下步骤检查:1、按照问题一处理;2、检查是否运动控制器软硬件不配套,更换运动控制器或更换配套软件;仍不行,进入下一步;3、与销售商或技术服务部门联系。
三、 运动控制器复位后,DAC输出不为零答:由于具体工作环境和系统造成初始输出偏差,调整驱动器零漂参数或调用zl_set_mtr_bias()命令补偿该偏差。
四、 不能正常读取编码器信号答:按以下步骤检查:1、如果是辅助编码器,检查编码器电源选择是否正确,如正确,进入下一步;2、检查编码器接线,如正确,进入下一步;3、检查是否编码器输入信号频率太高,编码器输入信号最高频率不大于1MHz,否则选择其它编码器降低分辨率;仍不行,进入下一步;4、检查编码器信号是否正常,用示波器检查编码器各相输出波形是否正常,各相之间90度相位差;如正常,进入下一步;5、换另一块运动控制器重试。
仍不行,进入下一步;6、与销售商或技术服务部门联系。
五、 电机震动答:电机微小震动是存在的,但如果震动幅度太大,则通过调整PID参数可以改善,尤其是适当减小比例参数P。
六、 模拟输出卡接伺服时,会飞车答:按以下步骤检查:1、通过调试环境确定位置反馈是否正确。
(1) 运行调试环境,“脉冲/电压”选择电压,“轴开/轴关”选择轴开,伺服驱动器使能,在运动控制页面中,设置控制轴“运动模式”为“直接输出”,“轴选择”为“ON”;(2) “设置电压”为0.5V,按“定点运动”;(3) 若该轴的“实际位置”不变,则检查编码器信号是否连接好;若该轴的“实际位置”减小,则编码器信号反馈错误,须调换编码器A、B相接线(调整时请指至少关闭电机、驱动器的电源);若该轴的“实际位置”增大,则进入下一步。
运动控制常见问题及处理速查手册

运动控制中常见问题速查手册安装调试:安装PCI接口的运动控制器,在WINDOWS中没有提示找到新设备(通讯异常)。
(2)硬件接线:控制卡脉冲控制模式单端输出如何接线?差分输出如何接线? (2)硬件接线:接步进电机,无法运动。
(3)硬件接线:运动控制器以步进模式(输出脉冲)控制电机,有一个方向运动正常,另一个方向不动(限位未触发,负载无影响)。
(3)硬件接线:电机可以转动,但工作不正常。
(3)硬件接线:控制卡接某些步进电机使能信号无效。
(3)硬件接线:抱闸电机的应用,经常导致线路干扰。
(4)硬件接线:限位或者home这类光电开关的电平变化检测不到。
(4)硬件接线:某个IO信号无法检测,或者端子板控制不正常。
(4)硬件接线:运动控制器连接的驱动器没有报警信号输出(步进电机驱动器一般无报警信号),轴总处于报警状态,无法使能。
(5)安装调试:编码器异常 (5)安装调试:运动控制器以步进模式(输出脉冲)控制伺服电机,伺服使能后立刻运动,电机运动不到位。
(5)安装调试:能够控制电机,但电机出现振荡或是过冲。
(5)安装调试:能够控制电机,但工作时回原点定位不准。
(6)安装调试:驱动器和运动控制器都安装了限位开关,电机运动当驱动器限位开先于运动控制器触发时系统的坐标会发生错乱(运动不到位)。
(6)安装调试:运动控制器以步进模式(输出脉冲)控制电机,连续往复运动,位置渐渐向一个方向偏移。
发现在一个往复运动后,有时会偏移一个脉冲。
(6)安装调试:控制卡发10000个脉冲,电机反馈没有10000(运动不到位)。
(7)安装调试:运动控制器以步进模式(输出脉冲)控制松下伺服电机,高速运动常常少走距离,低速运动正确(运动不到位)。
(7)编程应用:控制卡当速度设置较大Vel超过2000时,运动完成时,规划位置和目标位置不一致,或者电机运动已经异常,加速度或发的脉冲较少时却正常。
(7)编程应用:使用点动Jog+/Jog-松开后脉冲一直发,停不下来的情况。
罗克韦尔自动化运动控制系统常见问题解答
罗克韦尔自动化罗克韦尔自动化运动控制系统运动控制系统常见问题解答1.什么是实轴什么是实轴??什么是虚轴什么是虚轴??答:实轴可以理解为实际存在的想要控制的电机,一台电机或者一台执行器(电动缸,直线电机)可以理解为一根实轴。
虚轴则是相对于实轴而言的,它是仅存在与控制器内部的一个数据对象,没有物理上的器件(电机或执行器)和它对应,虚轴通常在程序起到参考同步信号或标准位置信号来使用。
2.Kinetix 2000,6000,7000驱动器驱动器和和Ultra3000,5000等系列驱动器之间主要区别在哪里等系列驱动器之间主要区别在哪里??答:Kinetix系列和Ultra系列驱动器都是由罗克韦尔自动化有限公司生产的伺服驱动器产品,从运动控制功能上来说,都可以满足各类从简单到复杂的运动控制应用。
但两类产品又各有其特点和区别。
驱动器Kinetix 2000,6000 Ultra 3000,5000架构共直流母线设计,共用整流单元,安装空间小,接线数量少,更节能。
结合Logix5000软件可以很方便的开发出从中小型到大型设备的控制程序。
适用于大中型运动控制架构。
轴数较多情况下成本低于ultra系列。
7000系列由于功率较大,虽然同列入kinetix系列,单外观上仍为单体型。
传统单体型设计,每台驱动器具有各自的整流单元,接线数量多于kinetix系列,适用于中小型架构。
Ultra5000较特殊,具有支持高级语言C开发程序功能,客户可在驱动器内部编制并固化自己控制程序并自动运行。
称为智能化驱动器。
网络只支持Sercos网络。
将来会推出支持以太网CIP协议的驱动器支持Sercos,DeviceNet。
脱离网络可使用Ultraware预配置运行。
安全功能所有6000系列和部分2000系列已经支持安全扭矩关断功能。
不久将来,可以脱离安全继电器和控制器实现安全速度,安全门开关控制能安全功能。
尚不支持安全关断功能3.在Sercos架构的网络中架构的网络中,,每块PLC最多可以控制多少个伺服轴最多可以控制多少个伺服轴??答:对于罗克韦尔自动化不同产品线的PAC可以控制的伺服轴数量限制是不同的。
浅析运动控制常见问题解决方案

浅析运动控制常见问题解决方案在电子半导体设备中,有众多对于高性能运动控制要求的场合,如捡取运动、输送、切割等,由于行程较小,而加工频次极高,定位精度高等特点,直线电机的需求较多,另外,高精度定位与CNC 和机器人的应用也大量存在如钻孔、机器人组装、产品定位与输送等。
就传统运动控制而言,往往基于专用控制器如CNC、运动控制模块、运动控制卡,这些带来以下问题:一、受到轴数限制由于传统PLC 连接的运动控制单个控制模块支持有限轴数,而且总线在轴多时会同步性能大幅度降低,即使采用现有的通信,但其软件架构却仍然是制约的瓶颈。
二、需要多个开发环境基于IEC61131-3 的逻辑编程、CNC 和机器人、液压、安全分别属于不同的编程工具,或多个厂商的,其编程软件、风格、项目管理均需不同的学习,而且,是否能够互通使得各个组件性能得到最佳发挥-几乎不大可能。
三、与其它如逻辑、Safety、液压、CNC 无法形成同步,或者软件的集成;四、无法与现代IT 技术集成,使用通用工具进行诊断与维护;基于传统RISC 架构的系统在对开放软件如VNCServer、Web 技术等支持能力方面较弱,无法使用现有的开放技术来实现远程维护与诊断,与MES 等虽然有接口但是其功能严重受限。
对于贝加莱的通用运动控制(GenericMotionControl)而言,定位与同步控制、CNC 和机器人、液压、安全等均纳入统一的软件架构,内部无缝连接,可以通过全局的变量耦合,从而实现多个控制技术内部有效融合,构成一个完整的一体化机器控制系统。
在此统一架构下,可以得到如下的应用收益:一、执行机构通用-无论对象多么复杂,一个平台完全集成对于GMC 而言,不同的执行机构如伺服电机、直线电机、液压机构、变频或步进,均被理解为运动关系的数学模型,因此,机器的运动控制被分解为不同对象的数据关系从而关联为整个机器的运动关系,而另一方面,自整定的智能驱动器使得在不同机器状态下的参数最优化,确保了高速高精度的系统运行。
运动控制面试题目(3篇)

第1篇一、引言随着科技的发展,运动控制领域在体育科学、康复医学、机器人技术等多个领域都显示出其重要性和应用价值。
本面试题目旨在考察应聘者对运动控制基本概念、人体运动机制、相关技术及其应用的理解和掌握程度。
以下为面试题目及解析。
二、面试题目1. 基础理论- 请简述运动控制的定义及其在人体运动中的作用。
- 人体运动的基本单位是什么?请详细解释其构成和功能。
- 神经系统在运动控制中扮演什么角色?请举例说明。
2. 运动系统- 请描述骨骼肌的结构和功能,以及其在运动中的作用。
- 关节在人体运动中起到什么作用?请举例说明关节在运动过程中的变化。
- 请解释骨杠杆原理,并举例说明其在运动中的应用。
3. 神经调节- 神经系统如何调节和控制运动?请详细说明神经调节的基本过程。
- 神经递质在神经调节中扮演什么角色?请举例说明。
- 请解释反射弧的概念,并说明其在运动控制中的作用。
4. 肌肉协调- 请简述肌肉协调的概念及其在运动中的作用。
- 请举例说明肌肉协调在完成复杂动作时的表现。
- 请解释肌肉协同收缩和拮抗收缩的概念,并说明其在运动中的应用。
5. 能量供应- 运动时,人体如何获取能量?请简述能量代谢的基本过程。
- 请解释ATP在运动中的作用,并说明其在能量供应过程中的重要性。
- 请解释乳酸积累对运动表现的影响,以及如何缓解乳酸积累。
6. 运动控制技术- 请简述运动控制技术的定义及其在运动训练中的应用。
- 请举例说明生物力学在运动控制中的应用。
- 请解释运动控制系统的组成,并说明其在运动控制中的作用。
7. 应用案例- 请举例说明运动控制技术在康复医学中的应用。
- 请举例说明运动控制技术在体育训练中的应用。
- 请举例说明运动控制技术在机器人技术中的应用。
8. 未来展望- 请展望运动控制领域未来的发展趋势。
- 请讨论运动控制技术在解决实际问题时可能面临的挑战。
- 请提出您对未来运动控制领域研究的建议。
三、解析1. 基础理论- 运动控制是研究人体运动产生、调节和控制规律的科学。
控制器参数和规格安全操作及保养规程
控制器参数和规格安全操作及保养规程1. 控制器参数和规格控制器是电子设备,主要作用是对电机进行控制和调节。
不同类型的控制器在工作原理、工作频率、输出电压等方面都存在差异,因此需要在购买控制器时,仔细查看其参数和规格,以确定是否符合自己的要求。
1.1 控制器参数1.输入电压:控制器的输入电压要与电源的电压匹配。
2.输出电流:控制器的最大输出电流要大于电机的额定电流。
3.工作频率:控制器的工作频率要与电机的额定频率匹配。
4.最大负载:控制器最大负载要大于电机的额定负载。
5.保护等级:控制器的保护等级要符合实际应用场景。
1.2 控制器规格1.外形尺寸:控制器的外形尺寸要与安装空间匹配。
2.工作环境温度:控制器的工作环境温度要符合实际应用环境。
3.质量等级:控制器的质量等级要符合实际要求。
4.型号:控制器的型号要符合实际应用需要。
2. 控制器安全操作控制器在使用过程中必须要注意安全操作,以确保人员和设备的安全。
2.1 通电前的检查1.检查控制器安装是否牢固。
2.检查电源是否正常工作。
3.检查电机是否连接正确。
4.检查控制器是否有异常报警或故障码。
2.2 通电后的注意事项1.控制器在使用过程中,应该避免使用损坏的电源线。
2.控制器在运行时,应该保持通风良好,防止过热。
3.不要在控制器周围堆放杂物,以免影响散热效果。
4.不要将控制器名义功率超过标准范围内的负载接在控制器上。
5.控制器在使用过程中,要经常检查运行状态和仪表显示值,及时处理异常报警或故障码。
2.3 控制器的故障排除1.控制器在使用过程中,出现异常报警或故障码时,要立即停止运行,查明原因及时处理。
2.控制器故障处理时要注意安全操作,切勿够分心急躁。
3.查找故障时,应按照故障排除流程进行,避免不必要的损失。
3. 控制器保养规程对于控制器的保养工作,应该做到定期检查、及时维护。
3.1 定期检查定期检查控制器的连接线路、散热系统、电源电压和电力状态等,确保无异常。
如何避免运动控制误区
如何避免运动控制误区作者:如火,2006-8-9 10:22:00 发表于:《运动控制论坛》共有13人回复,1819次点击加为好友发送留言作者:Chris Radley,丹纳赫传动打造一个成功的运动控制项目最紧要的是深入理解你的具体应用中的机器需求和技术规定。
工程师们很常见的错误就是一下子钻入工程组态细节里,研究准确的运动轨线或者转矩要求。
但是忽视了很多迫在眉睫的其他因素,影响了有效的工程组态。
例如解决系统集成问题、项目管理以及决策技巧等等。
为避免运动控制中的失误,需要将工程和管理方面很多技巧带到应用中来。
没有完全理解机器需求,未作出周密的运动控制方案这种基本错误源于对具体用途的机器未作深入详细了解。
不知道机器的运动形式,也不了解转矩和通信的要求,这样选择的硬件和软件都不会适合需要。
没有实施计划匆忙上马,安装调试等步骤只会延误时间,增加成本。
等到工程师发现装上了滚珠丝杠,但需要直线电机来满足速度需求的时候,那就麻烦了—需要大动干戈,重新设计。
这就应了那句老话:“没有时间把它做对,咋有时间把它做好”。
忽视最佳性能的集成要求在这方面,很多工程师认为实现系统集成太麻烦,不如选些好的部件装上完事。
选择好的执行器作为硬件是不错,但在高速运转时发现电机好用而执行器运作不正常怎么办?要根据机器需求认真审查各个部件,确保他们组合以后能够发挥机器规定的性能,而且整机好用。
一般来说,如果工程师们采用单一厂家的产品,而且与厂家配合紧密,整机应该没有问题。
如果有多个供应商,工程师的任务就繁重了。
他们应该保证整机在具体使用中发挥效益。
选择方案之前忽略了系统各种可能选项这是指忽略了各种可能选项而直接选定一种方案,会造成不顾需要买入过于好的设备,例如可用普通感应电机/驱动系统的地方而购买了伺服电机;也可能是买入达不到设备要求的产品,如买了步进电机而实际需要伺服系统。
还有的时候,工程师选择的方案限制了机器能力,原因是他们选择的厂家不能提供全面的解决方案。
运动控制器的问题解答——多普康自动化

运动控制器的问题解答——多普康自动化首先,大家生活中都会买东西,不管是什么东西,都不能保证它一直就是好的,坏了时会考虑是什么原因,怎样能弄好!那么,我要说的是,在自动化行业,大家所用的机械类产品自然也是一样,尤其是运动控制器,而运动控制器又不像我们买的吃的,买回去看看不好就不要了,下回不买了!它的价格会比吃的东西贵很多,而且用途也是很广,坏了随随便便的换掉或扔掉会心疼!这样一来,我们就会找厂家去维修,修好了再用!下面就运动控制器的问题,我给大家说两个关于多普康自动化生产的TC55系列控制器的例子,告诉大家一旦出现问题该怎么解决!一、TC55控制暂停的时候能否把部分输出口关掉,然后启动后再把输出恢复上?1.此功能正常状态小,TC55系统暂时是不带有这个功能的2.可以通过外围接线处理解决,首先要给系统输入口接出外部启动与外部暂停3.其次把外启动与外暂停变成自锁功能,就是按下启动时暂停钮弹开,按下暂停时启动钮弹开4.把需要在暂停时关掉的输出口接的继电器中间,串上外暂停按钮的常闭注意了!1:这样,当只按启动时,输出口把常闭的按钮(外暂停)串了进来,所以依然正常工作;当按下暂停时,暂停按钮本身起作用,保持程序暂停,同时把串到它身上的继电器也都断开了2:也可以不把外启动与外暂停做成自锁的,但是同时把这两个开关都串到需要关闭的输出继电器中,再加入一个继电器做成自锁的。
二、TC55控制器,运行中按暂停或急停,再启动后运行动作发生改变是什么问题?这个问题是程序编写的不对而导致在按启动电机会往反方向走,1、如果急停按钮设置的是程序结束,在按启动按钮控制器去执行下一行的反方向动作。
2、按暂停按钮的时候如果当前执行的是速度模式指令将要结束,然后在按启动按钮的时候控制器会自动执行下一条指令,如果这条指令是反方向的话那么控制器就自动会向反方向运动。
以上两个简单的例子希望对大家有所帮助,尤其是对多普康自动化给予大力支持的朋友们,感谢对多普康的厚爱!日后,随着科技发展的日新月异,多普康将始终站在自动化、信息化技术发展的最前沿;永远面向市场需求的最基层,提供先进的控制技术、合理化的工程解决方案以及全面的服务支持;以“专业、诚信”为原则,取信于客户,致力于先进控制技术深入千家万户;并以永远创业、不断创新的精神,向优秀企业的行列迈进!。
运动控制器应用笔记
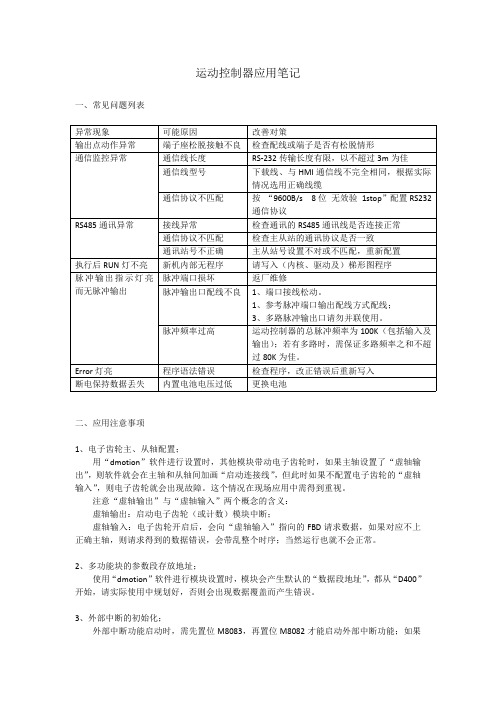
运动控制器应用笔记一、常见问题列表异常现象可能原因改善对策输出点动作异常端子座松脱接触不良检查配线或端子是否有松脱情形通信监控异常通信线长度RS-232传输长度有限,以不超过3m为佳通信线型号下载线、与HMI通信线不完全相同,根据实际情况选用正确线缆通信协议不匹配按“9600B/s8位无效验1stop”配置RS232通信协议RS485通讯异常接线异常检查通讯的RS485通讯线是否连接正常通信协议不匹配检查主从站的通讯协议是否一致通讯站号不正确主从站号设置不对或不匹配,重新配置执行后RUN灯不亮新机内部无程序请写入(内核、驱动及)梯形图程序脉冲输出指示灯亮而无脉冲输出脉冲端口损坏返厂维修脉冲输出口配线不良1、端口接线松动。
1、参考脉冲端口输出配线方式配线;3、多路脉冲输出口请勿并联使用。
脉冲频率过高运动控制器的总脉冲频率为100K(包括输入及输出);若有多路时,需保证多路频率之和不超过80K为佳。
Error灯亮程序语法错误检查程序,改正错误后重新写入断电保持数据丢失内置电池电压过低更换电池二、应用注意事项1、电子齿轮主、从轴配置;用“dmotion”软件进行设置时,其他模块带动电子齿轮时,如果主轴设置了“虚轴输出”,则软件就会在主轴和从轴间加画“启动连接线”,但此时如果不配置电子齿轮的“虚轴输入”,则电子齿轮就会出现故障。
这个情况在现场应用中需得到重视。
注意“虚轴输出”与“虚轴输入”两个概念的含义:虚轴输出:启动电子齿轮(或计数)模块中断;虚轴输入:电子齿轮开启后,会向“虚轴输入”指向的FBD请求数据,如果对应不上正确主轴,则请求得到的数据错误,会带乱整个时序;当然运行也就不会正常。
2、多功能块的参数段存放地址;使用“dmotion”软件进行模块设置时,模块会产生默认的“数据段地址”,都从“D400”开始,请实际使用中规划好,否则会出现数据覆盖而产生错误。
3、外部中断的初始化;外部中断功能启动时,需先置位M8083,再置位M8082才能启动外部中断功能;如果置位顺序相反,则要看在执行SetM8082时M8083的状态,如果执行SetM8082时M8083=ON,则外部中断功能启动;否则外部中断未被启动。
伺服常见规格问题(强烈推荐)
1.R7D-ZP系列伺服的命名? (2)2.R7D-ZP系列的伺服配置,可以自制电缆吗? (2)3.CP1H的PLC控制R7D-ZP系列的伺服系统,有没有中继端子台可以简化接线? (2)4 SSZ系列伺服与SSA系列伺服的区别? (3)5. SSZ系列伺服能接收模拟量信号吗? (3)6.R7D-AP系列伺服用什么电缆连接软件(CX-DRIVER)修改参数? (3)7. G系列伺服如何命名? (3)8. G系列伺服与W系列伺服的区别? (5)9. G系列1kw,3000转的伺服电机能选配1kw的伺服驱动器吗? (5)10. 选用了G系列的伺服和电机,自己制作电缆,其对应的连接器的型号是什么? (5)11. G系列伺服要配减速器,欧姆龙有对应的减速器的型号吗? (5)12. G系列伺服可以通过上位机来监视并修改其参数吗? (6)13. G系列伺服和其他厂家的PLC进来连接,连接电缆如何选择? (6)14.欧姆龙伺服驱动器是接收脉冲信号还是模拟量信号? (6)15. R88D-WN系列的伺服,如果配带绝对值编码器的电机要加电池,怎么配置? (6)16. SS2的伺服如何命名? (6)17. SS2系列伺服与A系列伺服的区别? (7)18.选用了SS2系列的伺服和电机,自己制作电缆,所配的连接器型号什么? (8)19. SS2系列的伺服需要改变输入脉冲的模式,可以通过面板来设置吗? (8)20. SS2系列伺服可以进行转矩控制吗? (8)21. SS2系列伺服和上位机进行通讯的连接电缆型号? (8)22.SS2系列伺服,有带绝对值编码器的电机吗? (8)23. SS2的伺服和其他厂家的PLC进来连接,连接电缆如何选择? (8)1.R7D-ZP系列伺服的命名?驱动器命名如下:R7D-ZP □□□①②③④伺服马达命名如下:R7M-Z □□□□□□□□①②③④⑤⑥2.R7D-ZP系列的伺服配置,可以自制电缆吗?可以的,但要订购连接器,型号是:R7A-CNZ01S-Z。
工业机器人中的运动控制技术使用注意事项分析
工业机器人中的运动控制技术使用注意事项分析工业机器人是一种能够自主完成各种任务的自动化设备,广泛应用于制造业领域。
在工业机器人中,运动控制技术是至关重要的一环,它决定了机器人的精度、速度和稳定性。
然而,由于运动控制技术的复杂性和多样性,使用过程中需要注意一些关键问题和技术细节,以确保机器人的安全和高效运行。
首先,对于工业机器人的运动控制技术,关键要素之一是运动控制器的选择。
运动控制器是负责控制机器人运动轴的设备,包括位置控制、速度控制和加速度控制等功能。
在选择运动控制器时,需要考虑机器人的工作负载、控制精度和运行速度等因素。
同时,还要对不同的运动控制器进行评估和比较,选择最符合机器人需求的控制器。
其次,在使用工业机器人时,需要注意运动控制技术的调试和校准。
运动控制技术的调试和校准是确保机器人运动的准确性和稳定性的关键环节。
首先,需要确定机器人的关键位置和轨迹点,并进行精确标定。
其次,通过调整运动控制器的参数,优化运动曲线和加速度曲线,提高机器人的运动性能。
最后,进行一系列的功能测试和负载测试,确保机器人在各种工作负载下都能够稳定运行。
此外,还要注意工业机器人的运动控制技术的安全性。
工业机器人在运行过程中可能会面临各种安全风险,例如碰撞、误操作和电气故障等。
因此,需要通过合理的安全设计和控制措施,保证机器人运动的安全性。
其中包括使用安全传感器和保护装置,监测和防止机器人与人员或物体的碰撞;设置急停开关和紧急停机系统,当出现异常情况时能够及时停止机器人的运动。
另外,还需要考虑到工业机器人的运动控制技术的可维护性。
工业机器人在运行过程中可能会出现故障或需要维护,因此需要采取相应的措施确保机器人的可维护性。
首先,需要定期检查机器人运动控制器和传感器等设备的工作状态,并进行维护和保养。
其次,需要建立完善的故障诊断和排除机制,以便及时发现并解决问题。
最后,要建立健全的备件和维修支持体系,确保机器人维修过程的高效性和可靠性。
运控问答题
1.1画出异步电动机变压变频调速控制特性,并说明其控制特点。
答:控制特点:在基频以下,磁通恒定时转矩也恒定,属于“恒转矩调速”性质;而在基频以上,转速升高时转矩降低,基本上属于“恒功率调速”。
1.2DTC 系统的调速范围受到限制的主要原因是什么?答:1:由于采用砰-砰控制,实际转矩必然在上下限内脉动,而不是完全恒定的。
2:由于磁链计算采用了带积分环节的电压模型。
积分初值,累积误差和定子电阻的变化都会影响磁链计算的准确度。
1.3转子磁链模型有哪几种?说明其优缺点。
答:1:计算转子磁链的电流模型:优点.需要实测电流和转速信号,不论转速高低都能适用。
缺点.受电动机参数变化影响,将导致磁链幅值与相位信号失真,而反馈信号的失真必定使得磁链闭环控制系统系能降低。
2:计算转子磁链的电压模型:优点.受电动机的影响较小,算法简单,便于应用。
缺点.由于包含纯积分项,积分的初始值和累积误差都影响计算结果,在低速时,定子电阻压降变化的影响也较大。
1.4异步电机矢量控制系统中的关键技术是什么?答:关键技术:坐标变换或反变换,通过磁场定向实现解耦。
1.5异步电动机直接转矩控制系统为什么比矢量控制系统动态响应快?答:1.转矩和磁链的控制采用双位式砰-砰控制器,并在PWM 逆变器中直接用这两个控制信号产生电压的SVPWM 波形,从而避开了将定子电流分解成转矩和磁链分量,省去了旋转变换和电流控制,简化了控制器的结构。
2.选择定子磁链作为被控量,而不像VC 系统中那样选择转子磁链,计算磁链的模型可以不受转子参数变化的影响,提高了控制系统的鲁棒性。
3.由于采用直接转矩控制,在加减速或负载变化的动态过程中,可以获得快速的转矩相应。
1.6矢量控制的基本思路是什么?答:将异步电动机经过坐标变换等效在直流电动机,模仿直流电动机的控制策略,得到直流电动机的控制量,再经过相应的坐标反变换,控制异步电机。
1.7简述恒压频比控制方式(1/s U ω,1/g E ω,1/r E ω)的特点。
控制器常见故障与解决办法

控制器常见故障与解决办法矽成微电子一、静态电流异常、限流电阻发热及工作指示灯不闪烁错误!未定义书签。
二、根据工作指示灯闪烁情况判断问题11、弱信号控制部份正常工作为1秒/次:22、慢闪2次,电路处于刹车状态:33、慢闪3次,康铜到LM358有参数不对或有开路情况:34、慢闪4次,下桥驱动到输出MOS有故障:35、慢闪5次,上桥驱动到输出MOS有故障:36、慢闪6次,60度120度选择与电机霍尔相序连接不对:37、慢闪7次,运行中电流过大保护38、慢闪8次,欠压状态:49、快闪2次,等待转把归零(上电防飞车功能):410、快闪3次,电机堵转停止:411、慢闪9次,遥控码输入错误:4三.特殊情况4一、静态电流异常、限流电阻发热及工作指示灯不闪烁1、电源正极线与地线是否接反。
2、63V1000UF;16V220UF;25V220UF是否焊反或搭锡。
3、LM317是否损坏、连锡、击穿、一脚没有焊接。
4、转把或霍尔+5V与地插件处不对应。
5、检测PCB板上+5V和+15V电压是否正常:A、+5V偏低请关电源,测+5V与地相对阻值:(1)处于导通状态则先查看板上+5V和地是否搭锡,后采用排除法检查7550、358、0608、NEC9234这四个元件中某个元件击穿短路。
(2) 若阻值偏低而不导通则直接采用排除法检查7550、358、0608、NEC9234这四个元件中由于某个元件软损伤而发生阻值偏低。
B、若+15V偏低请关电源(1) 查看317有无虚焊或搭锡。
(2) 测317三脚,两两之间的阻值是否变小和其分压电阻47K或5.6K两电阻是否虚焊或损坏。
(3) 测三相下桥驱动三极管有无损坏。
(4) +15V对地滤波贴片电容是否软击穿短路。
6、+5V对地贴片电容软击穿或搭锡短路。
7、电流异常,但控制器可以正常工作且可以加负载,一般是下桥驱动电路中(三相驱动)贴片三极管软损伤。
8、工作指示灯不闪烁工作指示灯不亮(确保电源已正确连接),用万用表的直流电压档测发光二极管的正极电压和负极电压:(1) 如正极电压为5V,负极电压处于跳变状态,则发光二极管虚焊或已损坏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. C200HW-NC模块使用的软件是什么? (1)
2. C200H的NC模块订购的时候带不带连接器? (1)
3. CS1W-NC/CJ1W-NC和C200HW-NC有什么区别? (1)
4.CJ1W-NC模块的型号是怎样命名的? (2)
5.CJ1W-NC、CS1W-NC系列模块使用的软件是什么? (2)
6.CJ/CS/的NC模块订购的时候带不带连接器? (2)
7. CS1W-NC/CJ1W-NC模块输出的最大频率为多少? (2)
1. C200HW-NC模块使用的软件是什么?
使用的软件是SYSMAC-NCT的软件。
2. C200H的NC模块订购的时候带不带连接器?
订购时都带了连接器,不需客户另外购买。
如果需要再购买, C200H的NC模块的连接器的型号是FCN-361J048-AU(焊接类型)和FCN-360C048-D(连接器封套)。
3. CS1W-NC/CJ1W-NC和C200HW-NC有什么区别?
4.CJ1W-NC模块的型号是怎样命名的?
型号命名规则如下:
5.CJ1W-NC、CS1W-NC系列模块使用的软件是什么?
CJ1W-NC、CS1W-NC系列模块使用的软件是CX-position软件或CX-ONE软件包(内含CX-position软件)。
这些模块也可以不用以上软件,可以通过设置DM区的数值来设置NC模块的参数。
6.CJ/CS/的NC模块订购的时候带不带连接器?
订购时都带了连接器,不需客户另外购买。
如果需要再购买,CJ的NC模块的连接器的型号是FCN-361J040-AU(焊接类型)和FCN-360C040-J2(连接器封套)。
7. CS1W-NC/CJ1W-NC模块输出的最大频率为多少?
CS1W-NC/CJ1W-NC模块输出频率最大可以达到500KHz。