Maxwell与Simplorer联合仿真方法及注意问题
基于Maxwell与Simplo...

基于Maxwell与Simplo...一、写在前面本文是笔者之前写给ANSYS 官方案例文档(精简版),文章比较长,请大家选择性观看。
对于那些已经报名且学完了我的线上课程《ANSYS Maxwell技能培训10讲,掌握Maxwell十大仿真分析能力》的200+位学员,请联系仿真小助手索要模型认真练习,遇到疑问,欢迎在VIP群交流。
二、前言本章以异步电机的启动计算为例,运用ANSYS19.0,先在RMxprt模块进行电机设计,并完成计算。
再利用RMxprt模块与二维和三维模块之间强大的无缝链接技术,将RMxprt中的电机模型一键导入到Maxwell 2D模块,在Maxwell 2D模块进行有限元分析计算。
最后在Simplorer中建立电路与Maxwell 2D中的电机模型进行场路耦合联合仿真,从而计算异步电机启动后突加负载时三相电流磁链等的变化情况。
三、设计目标异步电机是应用最为广泛的电机类型之一,广泛应用于冶金、煤炭、矿山、机械和油田等各个工业生产领域。
在本例中采用国标Y系列作为计算样机,先在RMxprt模块中建立基本样机模型,再送入Maxwell 2D模块进行有限元分析。
以一台55kW的三相异步电机为例,该电机的定子和转子铁芯轴长为255mm,铁芯材料采用热轧硅钢片D23。
定子绕组采用三相60度相带,线规为Φ1.4铜线,5股作为1匝,每槽22匝,双层绕组,节距为11。
通过本例的学习,希望读者能掌握电机在RMxprt中的建模计算、模型导入Maxwell 2D的方法以及与simplorer外电路进行场路耦合等。
读者可以尝试运用这些方法技巧建立其他电机模型进行计算分析,包括永磁无刷直流电机、永磁同步电机、磁阻电机。
四、操作步骤1、新建工程打开ANSYS仿真软件,找到Maxwell模块对应的图标,单击图标中的下三角,选择RMxprt模块,在弹出的电机类型选择窗口中选择“Three-Phase Induction Motor”,点击“OK”确定。
Maxwell与Simplorer联合仿真方法及注意问题剖析
三相鼠笼式异步电动机的协同仿真模型实验分析本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell 2D模型中进行一下几步设置:第一步,设置Maxwell和Simplorer端口连接功能。
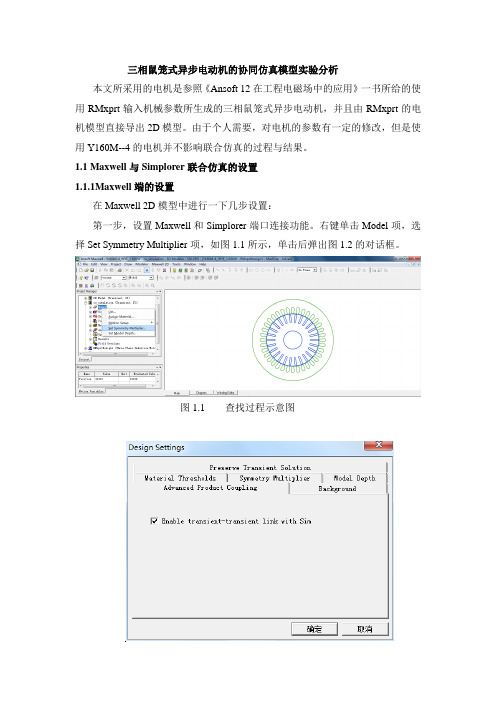
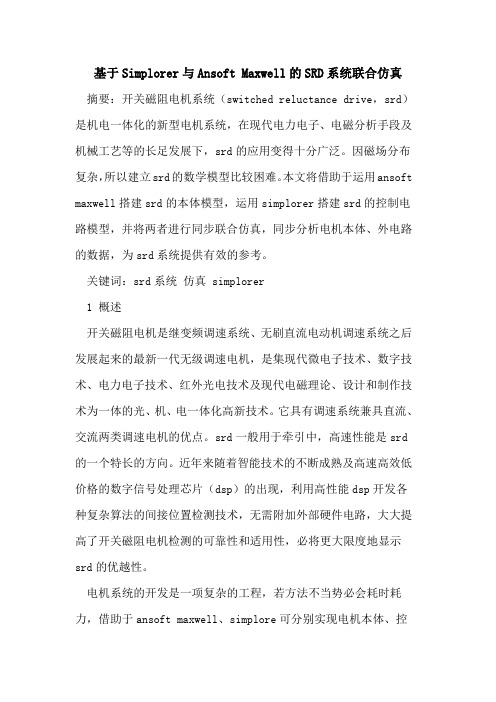
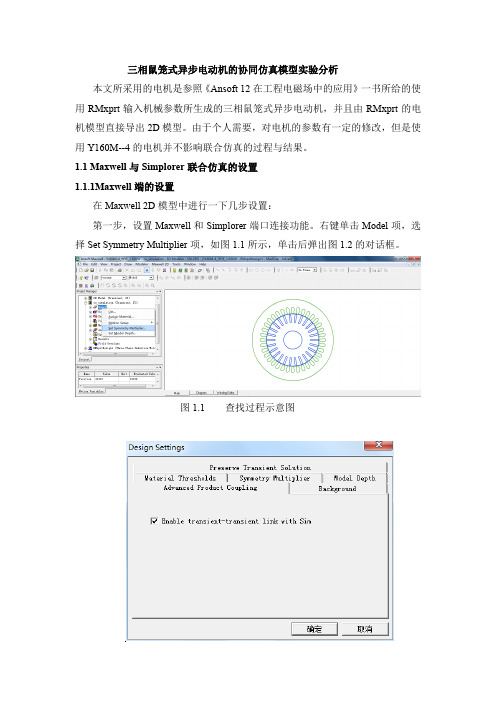
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
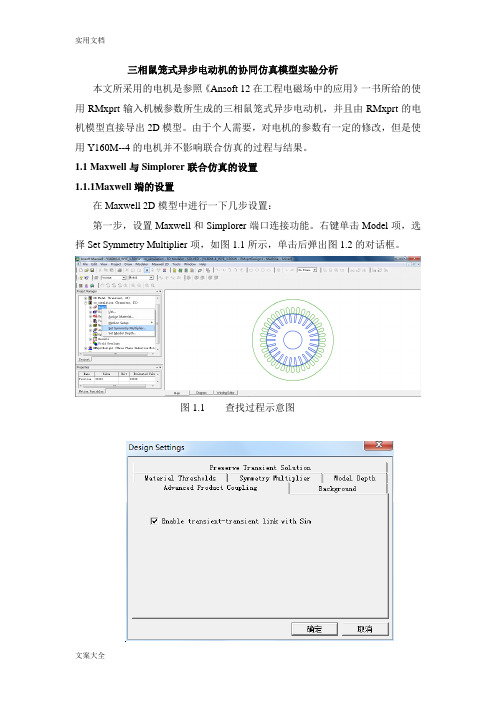
图1.1 查找过程示意图图1.2 设计设置对话框在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的一点是,建议在设置Maxwell与Simplorer连接功能即第一步之前,记录电压激励源下的电阻和电感。
事实上,这里的电组和电感就是Maxwell 2D计算出的电机的定子电阻与定子电感。
这两个数据在外电路的连接中会使用到,在后面会详细说明。
至此,Maxwell端的设置完毕。
1.1.2 Simplorer端的设置Simplorer端的设置,主要是对电机外电路的设置,具体的电路会在空载实验和额定负载实验中详细给出,这里不再赘述。
最专业的Maxwell-simplore联合仿真教程

一、 Simplore 与 Maxwell 电路耦合分析 本部分详见其他参考文件。 1、打开一个已经进行过瞬态分析的 Maxwell 文件。将该工程文件的电源激励 ABC 相更改 为 PhaseA 右键-Properties-将 Type 中的 Voltage 改为 External。
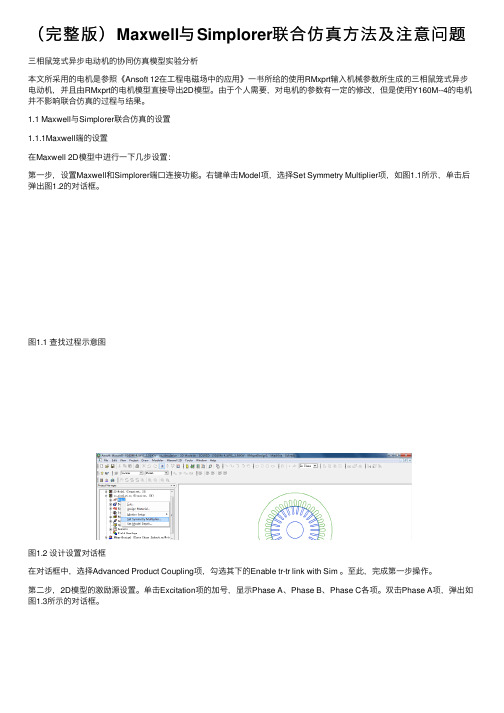
2、勾选 Maxwell2D-DesignSettings-Enable Transient-transient
3、进入 Simplore 界面 选择之前已经计算好的 Maxwell 工程文件
导入到窗口后如图,该图只是提供一个电机模型,不存在数据。可按住 Shift+滚轮 调整大小。
4、给定电压源双击修改参数。
5、给定负载转矩、惯量,双击修改参数。 6、对未用到管脚接地(ctrl+G)做好后如图
7、求解
Hale Waihona Puke
Maxwell与Simplorer联合仿真方法及注意问题
三相鼠笼式异步电动机的协同仿真模型实验分析本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell 2D模型中进行一下几步设置:第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图图1.2 设计设置对话框在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的一点是,建议在设置Maxwell与Simplorer连接功能即第一步之前,记录电压激励源下的电阻和电感。
事实上,这里的电组和电感就是Maxwell 2D计算出的电机的定子电阻与定子电感。
这两个数据在外电路的连接中会使用到,在后面会详细说明。
至此,Maxwell端的设置完毕。
1.1.2 Simplorer端的设置Simplorer端的设置,主要是对电机外电路的设置,具体的电路会在空载实验和额定负载实验中详细给出,这里不再赘述。
基于Simplorer与Maxwell的磁控电抗器特性仿真分析

comprehensive analysis of the response characteristic and magnetic field performance under the external complex
control circuit. In order to make up for this defect,
a new method for the field-circuit coupled multi-physics simulation
by combining Simplorer and Maxwell was introduced. By comparing and analyzing the relevant data of simulation with
Zhengzhou University,
Zhengzhou 450001,
Henan,
China;
2. Datang Central-China Electric Power Test Research
Institute,
Zhengzhou 450000,
Hee current simulation analysis method of magnetically controlled reactors cannot realize the
河南 郑州 450000)
摘要:磁控电抗器仿真分析方法无法实现在外部具有复杂控制电路下的响应特性与磁场性能的全面分
析。为了弥补这个缺陷,引入 Simplorer 与 Maxwell 联合实现场路耦合多物理域仿真的新方法,通过与 Matlab/
Simulink 仿真的相关数据对比,分析得出新的仿真分析方法更优,能为设计出性能更好的可控电抗器提供实
simplorer永磁同步电机的仿真分析
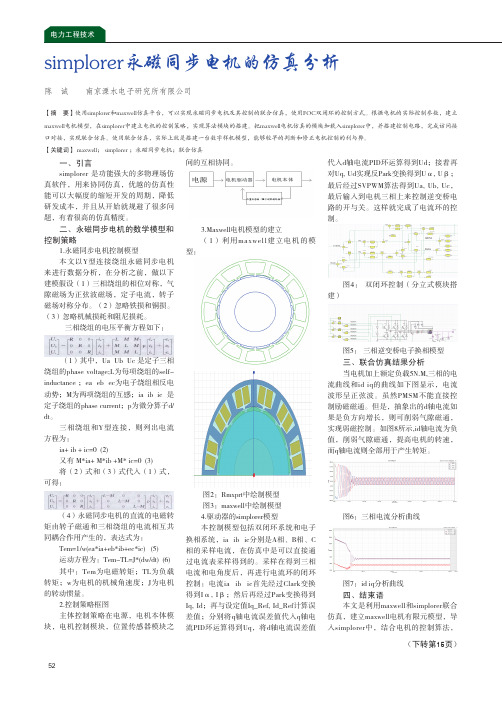
52一、引言simplorer 是功能强大的多物理场仿真软件,用来协同仿真,优越的仿真性能可以大幅度的缩短开发的周期,降低研发成本,并且从开始就规避了很多问题,有着很高的仿真精度。
二、永磁同步电机的数学模型和控制策略1.永磁同步电机控制模型本文以Y型连接绕组永磁同步电机来进行数据分析,在分析之前,做以下建模假设(1)三相绕组的相位对称,气隙磁场为正弦波磁场,定子电流,转子磁场对称分布。
(2)忽略铁损和铜损。
(3)忽略机械损耗和阻尼损耗。
三相绕组的电压平衡方程如下:(1)其中,Ua Ub Uc 是定子三相绕组的phase voltage;L为每项绕组的self-inductance ;ea eb ec为电子绕组相反电动势;M为两项绕组的互感;ia ib ic 是定子绕组的phase current;p为微分算子d/ dt。
三相绕组和Y型连接,则列出电流方程为:ia+ ib + ic=0 (2)又有 M*ia+ M*ib +M* ic=0 (3)将(2)式和(3)式代入(1)式,可得:(4)永磁同步电机的直流的电磁转矩由转子磁通和三相绕组的电流相互共同耦合作用产生的,表达式为:Tem=1/w(ea*ia+eb*ib+ec*ic) (5)运动方程为:Tem-TL=J*(dw/dt) (6)其中:Tem为电磁转矩;TL为负载转矩;w为电机的机械角速度;J为电机的转动惯量。
2.控制策略框图主体控制策略在电源,电机本体模块,电机控制模块,位置传感器模块之间的互相协同。
3.Maxwell电机模型的建立(1)利用maxwell建立电机的模型:图2:Rmxprt中绘制模型图3:maxwell中绘制模型4.驱动器的simplorer模型本控制模型包括双闭环系统和电子换相系统,ia ib ic分别是A相、B相、C相的采样电流,在仿真中是可以直接通过电流表采样得到的。
采样在得到三相电流和电角度后,再进行电流环的闭环控制:电流ia ib ic首先经过Clark变换得到Iα, Iβ;然后再经过Park变换得到Iq, Id;再与设定值Iq_Ref, Id_Ref计算误差值;分别将q轴电流误差值代入q轴电流PID环运算得到Uq,将d轴电流误差值代入d轴电流PID环运算得到Ud;接着再对Uq, Ud实现反Park变换得到Uα, Uβ;最后经过SVPWM算法得到Ua, Ub, Uc,最后输入到电机三相上来控制逆变桥电路的开与关。
(完整版)Maxwell与Simplorer联合仿真方法及注意问题
三相鼠笼式异步电动机的协同仿真模型实验分析本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell 2D模型中进行一下几步设置:第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图图1.2 设计设置对话框在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的一点是,建议在设置Maxwell与Simplorer连接功能即第一步之前,记录电压激励源下的电阻和电感。
事实上,这里的电组和电感就是Maxwell 2D计算出的电机的定子电阻与定子电感。
这两个数据在外电路的连接中会使用到,在后面会详细说明。
至此,Maxwell端的设置完毕。
1.1.2 Simplorer端的设置Simplorer端的设置,主要是对电机外电路的设置,具体的电路会在空载实验和额定负载实验中详细给出,这里不再赘述。
基于Simplorer和Maxwell联合运行的线性压缩机仿真模拟

基于Simplorer和Maxwell联合运行的线性压缩机仿真模
拟
邹慧明;张立钦;彭国宏;田长青
【期刊名称】《压缩机技术》
【年(卷),期】2011(000)001
【摘要】基于Simplorer仿真软件和Maxwell磁场二维瞬态分析软件联合仿真平台,建立了线性压缩机的仿真模型,实现线性压缩机电磁场数值分析、机械振动动力学分析以及电路系统特性分析的联合仿真模拟.采用该仿真模型分析了线性压缩机在不同工况下的性能特点,并将仿真结果与样机压缩空气实验结果相比较,验证了仿真模型的可行性.
【总页数】6页(P7-11,14)
【作者】邹慧明;张立钦;彭国宏;田长青
【作者单位】中国科学院理化技术研究所,北京,100190;中国科学院理化技术研究所,北京,100190;中国科学院研究生院,北京,100190;中国科学院理化技术研究所,北京,100190;中国科学院理化技术研究所,北京,100190
【正文语种】中文
【中图分类】TH457
【相关文献】
1.基于Maxwell与Simplorer的三相异步电机变绕组调速系统仿真 [J], 陈铎文;蔡卓剑;吴敏;赵荣祥;杨欢
2.基于Maxwell和Simplorer轮毂式SRD分析与研究 [J], 姜保军;周林;黄大飞
3.基于Simplorer与Maxwell的磁控电抗器特性仿真分析 [J], 赵国生; 孙彬; 李培; 原峰
4.基于Ansoft Maxwell与Simplorer的磁控电抗器建模方法研究 [J], 李思楠;高金峰
5.基于Maxwell&Simplorer的盘式外转子开关磁阻发电机设计 [J], 华敏;莫岳平;徐迪;刘志伟
因版权原因,仅展示原文概要,查看原文内容请购买。
RMXPRT-MAXWELL和SIMPLORER的联合仿真解析
RMXPRT/MAXWELL和SIMPLORER的联合仿真解析
1. 建立RMXPRT模型电机为4极9槽稀土永磁无刷电机,这里不讨论电机的实际设计,所以具体参数不列出了,只当作操作步骤演示。
2.设置好电机的各项参数后,计算电机的性能,得到电机的特性参数,后面将对RMXPRT 的数据和SIMPLORER的数据做比较,所以这里列出了电机的力矩和电流曲线。
请注意6000RPM时的力矩和电流数值,分别为124mNm,4.18A.请注意在这个例子里设置了限流值5.0A,后面SIMPLORER里同样有这个设置。
3. 输出RMXPRT的SIMPLORER模型,步骤见下图
4. 到这里RMXPRT的操作就结束了,输出的模型A相绕组的中心对准磁极的中心。
这个很重要,在RMXPRT中,对准是自动进行的,在MAXWELL里就要使用者自己来做。
5. 在SIMPLORER中导入前面建立的RMXPRT模型,
路径是MODELAGENTADDONINTERFACESRMXPRT
6. 将上图中的RMX-LINK图标拖到SIMPLORERSCHEMATIC的窗口中,双击图标
电机IMPORTMODEL,在路径中指定RMXPRT的SIMPLORER模型的路径,这样,电机的SIMPLORER模型就导入了,RMX-LINK图标变成了电机的实际外形。
下面是逆变器模型。
7. 逆变器用MOSFET构成,这里为了简化,MOSFET用了系统级的元件模型。
8. MOSFET驱动电路
这个驱动实际上就是将电机的3相绕组导通的时序规律用SIMPLORER的模块表示出来。
sim-sim-maxwell联合仿真遇到的问题及解决方法

sim-sim-maxwell联合仿真遇到的问题及解决方法Maxwell、Simplorer与Simulink联合仿真[请输入文档摘要,摘要通常是对文档内容的简短总结。
输入文档摘要,摘要通常是对文档内容的简短总结。
]错误!未找到引用源。
目录前言 (3)一、在Maxwell里建立仿真模型,并设置联合仿真参数 (4)二、Simplorer (7)三、Simplorer与Maxwell的联合 (8)三、Simplorer与Simulink (9)1、在Simplorer里的操作 (10)2、在Simulink里的操作 (13)五、求解器参数的设置 (18)常见的问题 (20)前言本文主要介绍Maxwell、Simplorer和Simulink如何实现联合仿真,已经出现的问题和解决方法。
以直线开关磁阻电机为仿真模型,对电机模型的参数进行辨识,控制算法采用PID和极点配置自适应控制算法。
用到的软件版本分别为:Maxwell 13、Simplorer 9.0和MATLAB R2007b。
三个软件里建立的工程或模型文件必须放在同一个文件夹里,仿真中需要建立的和分析后生成的文件如图1所示。
图 1在Maxwell里建立有限元仿真模型;Simplorer 提供功率电路部分,是将Maxwell和Simulink连接起来的桥梁;Simulink 为联合仿真提供控制算法,输入为期望的位置信号和实际的位置信号(从Simplorer里输入)输出为三相电流信号。
一、在Maxwell里建立仿真模型,并设置联合仿真参数1、根据实际电机的尺寸和材料建立直线开关磁阻电机的磁场瞬态分析模型,如图2所示。
图 22、对电磁瞬态分析的一些仿真参数进行设置(如图3所示)。
包括运动区域,求解边界条件,激励,力矩,网格剖分(理论上说网格剖分越细求解越精确,但是剖分越细求解时间越长,所以可以根据实际情况综合考虑)、分析设置(后面会讲到)。
图 33、联合仿真中激励的添加:激励类型选择“External”,初始值为0A,如图4所示。
Maxwell与Simplorer联合仿真
三相鼠笼式异步电动机的协同仿真模型实验分析本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell 2D模型中进行一下几步设置:第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图图1.2 设计设置对话框在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的一点是,建议在设置Maxwell与Simplorer连接功能即第一步之前,记录电压激励源下的电阻和电感。
事实上,这里的电组和电感就是Maxwell 2D计算出的电机的定子电阻与定子电感。
这两个数据在外电路的连接中会使用到,在后面会详细说明。
至此,Maxwell端的设置完毕。
1.1.2 Simplorer端的设置Simplorer端的设置,主要是对电机外电路的设置,具体的电路会在空载实验和额定负载实验中详细给出,这里不再赘述。
基于Simplorer和Maxwell联合运行的线性压缩机仿真模拟
基于Simplorer和Maxwell联合运行的线性压缩机仿真模拟邹慧明;张立钦;彭国宏;田长青【摘要】基于Simplorer仿真软件和Maxwell磁场二维瞬态分析软件联合仿真平台,建立了线性压缩机的仿真模型,实现线性压缩机电磁场数值分析、机械振动动力学分析以及电路系统特性分析的联合仿真模拟.采用该仿真模型分析了线性压缩机在不同工况下的性能特点,并将仿真结果与样机压缩空气实验结果相比较,验证了仿真模型的可行性.【期刊名称】《压缩机技术》【年(卷),期】2011(000)001【总页数】6页(P7-11,14)【关键词】线性压缩机;仿真模拟;动力学【作者】邹慧明;张立钦;彭国宏;田长青【作者单位】中国科学院理化技术研究所,北京,100190;中国科学院理化技术研究所,北京,100190;中国科学院研究生院,北京,100190;中国科学院理化技术研究所,北京,100190;中国科学院理化技术研究所,北京,100190【正文语种】中文【中图分类】工业技术2011年第 1 期(总 225 期)文章编号:1006-2971f2011 ) 01-0007-06 0引言 Simplorer 和 Maxwell 联合运行的线性压缩机仿真模拟邹慧明1 ,张立钦1.2 .彭国宏1.2,田长青 1( 1.中国科学院理化技术研究所,北京 100190 ;2.中国科学院研究生院,北京 100190 )摘要:基于Simplorer‘仿真软件和Maxwell 磁场二维瞬态分析软件联合仿真平台,建立了线性压缩机的仿真模型,实现线性压缩机电磁场数值分析、机械振动动力学分析以及电路系统特性分析的联合仿真模拟。
采用该仿真模型分析了线性压缩机在不同工况下的性能特点,并将仿真结果与样机压缩空气实验结果相比较,验证了仿真模型的可行性。
关键词:线性压缩机;仿真模拟;动力学中图分类号: TH457文献标志码:A Simulationof LinearCompressorBasedonSimplorerandMaxwell ZOUHui-ming',ZHANGLi-qin"2.PENG Guo-hong"2,TIAN hang-qingl ( 1.Technical InstituteofPhysics andChem 厶try,ChineseAcademyofScien.ces,Beijing100190,Chinn.; 2.GraduateUniversity ofChinese AcademyofSciences,Beijing100190,China)Abstract:Thispaperestablishes asimulationmodelfor linear compressorbasedonSimplorersimulationplat-formandMaxwellsimulation platform to achieve the jointsimulation ofelectromagneticfield,mechanicaldynam-ics andelectricalsystemanalysis onlinear compressor.Thecharacteristicsof linear compressorworkingwiLh airon variable conditionsareanalyzedby the simulationmodel.Thesimulation modelis validated well by the com- parisonbetweenthe simulationresultsandthe experimentaldata. Keywords:linearcompressor;simulation ;dynamics采用直线振荡电机作为驱动装置的线性压缩机主要由机械系统(直线电机驱动活塞往复运行)、电磁系统(电源驱动直线电机)和热力系统(活塞压缩气缸内气体)组成,相比于传统旋转电机驱动的活塞压缩机,该类压缩机效率较高。
sim_sim maxwell联合仿真遇到的问题及解决方法

Maxwell、Simplorer与Simulink联合仿真[请输入文档摘要,摘要通常是对文档内容的简短总结。
输入文档摘要,摘要通常是对文档内容的简短总结。
]错误!未找到引用源。
目录前言 (2)一、在Maxwell里建立仿真模型,并设置联合仿真参数 (3)二、Simplorer (6)三、Simplorer与Maxwell的联合 (7)三、Simplorer与Simulink (8)1、在Simplorer里的操作 (9)2、在Simulink里的操作 (12)五、求解器参数的设置 (16)常见的问题 (18)前言本文主要介绍Maxwell、Simplorer和Simulink如何实现联合仿真,已经出现的问题和解决方法。
以直线开关磁阻电机为仿真模型,对电机模型的参数进行辨识,控制算法采用PID和极点配置自适应控制算法。
用到的软件版本分别为:Maxwell 13、Simplorer 9.0和MATLAB R2007b。
三个软件里建立的工程或模型文件必须放在同一个文件夹里,仿真中需要建立的和分析后生成的文件如图1所示。
图 1在Maxwell里建立有限元仿真模型;Simplorer 提供功率电路部分,是将Maxwell和Simulink连接起来的桥梁;Simulink 为联合仿真提供控制算法,输入为期望的位置信号和实际的位置信号(从Simplorer里输入)输出为三相电流信号。
一、在Maxwell里建立仿真模型,并设置联合仿真参数1、根据实际电机的尺寸和材料建立直线开关磁阻电机的磁场瞬态分析模型,如图2所示。
图 22、对电磁瞬态分析的一些仿真参数进行设置(如图3所示)。
包括运动区域,求解边界条件,激励,力矩,网格剖分(理论上说网格剖分越细求解越精确,但是剖分越细求解时间越长,所以可以根据实际情况综合考虑)、分析设置(后面会讲到)。
图 33、联合仿真中激励的添加:激励类型选择“External”,初始值为0A,如图4所示。
ANSYS Maxwell和Simplorer新功能介绍
26
二维和三维涡流场求解器支持绕组设置
Winding setup is the same as transient except additional phase input
New Winding Definition
27
二维和三维涡流场求解器支持绕组设置
• R16 and before: only current sources were possible • R17: voltage source, circuit coupling available
30
Enhanced flow for Magnetization and Demagnetization
改进的充磁和退磁分析流程
Patent Pending
8
TDM 介绍
• 新方法: 沿着时间轴上的区域分解法,可以让用户不用再 一个一个时间点按序求解,而是同时求解多个时间点
t0
t1
t2
t3
t4
…
t_end
• 用户可以使用:
单个计 算单元
多个计 算单元
cluster
9
虚拟云
TDM 介绍
TDM可以用于分析2D和3D的任意瞬态磁场问题(旋转电机、变 压器等),包括:
更方便的设置初始网格中曲面曲线剖分密度用户可以使用手动设置也可以使用拖动工具条设置由于新的facetter模型处理算法r16和r17中曲面曲设置中的相同的surfacedeviationnormaldeviation和aspectratio可能会有不同的结果42新的rotationallayer网格剖分算法?应用于旋转电机?更有效计算导条里的涡流43新的cutedge剖分算法?该类型剖分的首次发布以后还会发布更多?在xy平面上增加一层网格单元44maxwell其他改进45二维瞬态分析支持multisliceapproachtosolveamachinewithskewedrotorusingseveralslicesinmaxwell2d
基于Simplorer与Ansoft MaxwellSRD系统联合仿真
基于Simplorer与Ansoft Maxwell的SRD系统联合仿真摘要:开关磁阻电机系统(switched reluctance drive,srd)是机电一体化的新型电机系统,在现代电力电子、电磁分析手段及机械工艺等的长足发展下,srd的应用变得十分广泛。
因磁场分布复杂,所以建立srd的数学模型比较困难。
本文将借助于运用ansoft maxwell搭建srd的本体模型,运用simplorer搭建srd的控制电路模型,并将两者进行同步联合仿真,同步分析电机本体、外电路的数据,为srd系统提供有效的参考。
关键词:srd系统仿真 simplorer1 概述开关磁阻电机是继变频调速系统、无刷直流电动机调速系统之后发展起来的最新一代无级调速电机,是集现代微电子技术、数字技术、电力电子技术、红外光电技术及现代电磁理论、设计和制作技术为一体的光、机、电一体化高新技术。
它具有调速系统兼具直流、交流两类调速电机的优点。
srd一般用于牵引中,高速性能是srd 的一个特长的方向。
近年来随着智能技术的不断成熟及高速高效低价格的数字信号处理芯片(dsp)的出现,利用高性能dsp开发各种复杂算法的间接位置检测技术,无需附加外部硬件电路,大大提高了开关磁阻电机检测的可靠性和适用性,必将更大限度地显示srd的优越性。
电机系统的开发是一项复杂的工程,若方法不当势必会耗时耗力,借助于ansoft maxwell、simplore可分别实现电机本体、控制电路的仿真模型的建立,并且两者可以实现联合仿真功能,参数修改方便,结果经实践验证是比较可靠的,这为电机系统的开发提供了很好的仿真工具,可以为广大的工程技术人员所借鉴。
2 开关磁阻电机的结构特点图1所示的为单相开关磁阻电动机结构,其定转子均为凸极结构,转子上既无永磁体又无绕组,定子绕组为集中绕组。
可以看出该类电机的转子转动惯量小,动态响应迅速,无电刷和换向器,控制参数多、方式灵活等其他电机无法比拟的优点;适用于需要频繁调速和起动停止的场合[1][2]。
(完整word版)Maxwell与Simplorer联合仿真方法及注意问题剖析
三相鼠笼式异步电动机的协同仿真模型实验分析本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell 2D模型中进行一下几步设置:第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图图1.2 设计设置对话框在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的一点是,建议在设置Maxwell与Simplorer连接功能即第一步之前,记录电压激励源下的电阻和电感。
事实上,这里的电组和电感就是Maxwell 2D计算出的电机的定子电阻与定子电感。
这两个数据在外电路的连接中会使用到,在后面会详细说明。
至此,Maxwell端的设置完毕。
1.1.2 Simplorer端的设置Simplorer端的设置,主要是对电机外电路的设置,具体的电路会在空载实验和额定负载实验中详细给出,这里不再赘述。
Maxwell与Simplorer联合仿真方法及注意问题(特选借鉴)

三相鼠笼式异步电动机的协同仿真模型实验分析
本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置
1.1.1Maxwell端的设置
在Maxwell 2D模型中进行一下几步设置:
第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图
图1.2 设计设置对话框
在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置。
(完整版)Maxwell与Simplorer联合仿真方法及注意问题
(完整版)Maxwell与Simplorer联合仿真⽅法及注意问题三相⿏笼式异步电动机的协同仿真模型实验分析本⽂所采⽤的电机是参照《Ansoft 12在⼯程电磁场中的应⽤》⼀书所给的使⽤RMxprt输⼊机械参数所⽣成的三相⿏笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个⼈需要,对电机的参数有⼀定的修改,但是使⽤Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell 2D模型中进⾏⼀下⼏步设置:第⼀步,设置Maxwell和Simplorer端⼝连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所⽰,单击后弹出图1.2的对话框。
图1.1 查找过程⽰意图图1.2 设计设置对话框在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
⾄此,完成第⼀步操作。
第⼆步,2D模型的激励源设置。
单击Excitation项的加号,显⽰Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所⽰的对话框。
图1.3 A相激励源设置在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的⼀点是,建议在设置Maxwell与Simplorer连接功能即第⼀步之前,记录电压激励源下的电阻和电感。
事实上,这⾥的电组和电感就是Maxwell 2D计算出的电机的定⼦电阻与定⼦电感。
这两个数据在外电路的连接中会使⽤到,在后⾯会详细说明。
⾄此,Maxwell端的设置完毕。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相鼠笼式异步电动机的协同仿真模型实验分析
本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置
1.1.1Maxwell端的设置
在Maxwell 2D模型中进行一下几步设置:
第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图
图1.2 设计设置对话框
在对话框中,选择Advanced Product Coupling项,勾选其下的 Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置
在上图的对话框中,将激励源的Type项设置为External,并勾选其后的Strander,并且设置初始电流Initial Current项为0。
Number of parallel branch项按照电机的设置要求,其值为1。
参数设置完成后,点击确定退出。
需要说明的一点是,建议在设置Maxwell与Simplorer连接功能即第一步之前,记录电压激励源下的电阻和电感。
事实上,这里的电组和电感就是Maxwell 2D计算出的电机的定子电阻与定子电感。
这两个数据在外电路的连接中会使用到,在后面会详细说明。
至此,Maxwell端的设置完毕。
1.1.2 Simplorer端的设置
Simplorer端的设置,主要是对电机外电路的设置,具体的电路会在空载实验和额定负载实验中详细给出,这里不再赘述。
1.1.3 联合仿真时间的设置
联合仿真时,Maxwell和Simplorer同时运行,程序按照各自设定的时间和步长运行。
其中Simplorer是主动者,Maxwell是被动者,当Maxwell运行完毕但Simplorer尚在运行时,Maxwell将重新运行,与Simplorer进行数据交换。
在实践中,发现仿真时间的设置对结果有一定的影响。
例如,将二者仿真时间和步长设置相同的话,仿真的结果就不正确。
在反复试验的前提下,得到如下经验:将Simplorer的时间和步长设置长一些,将Maxwell的时间和步长设置短一些,这样实验的结果就接近正确值。
1.1.4 2D模型的导入
2D模型的导入Simplorer中的步骤,如图1.4所示。
图1.4 导入步骤
点击以后,会弹出图1.5所示的对话框。
图1.5 2D导入对话框
其中File项是指待添加Maxwell 2D模型的位置,下面的选项是选择2D模型还是3D模型,Solution项是选择对应的TR。
1.2 空载实验协同仿真分析
1.2.1 Simplorer电路设置
空载实验的电路图如图1.6所示。
图1.6 空载实验电路设置图
外电路的确定主要是通过以下几个步骤:
①电源电压不能直接与电机的三相输入端口直接相连,通过查阅资料得知,需要在线路上添加电阻或电感器件。
实验初始,加入小电阻,相当于电源的阻,在外电路设置的基础上可以运行。
②三相输出连接在一起,接地与不接地不影响实验的结果,这个是通过对比验证得出的结论。
③MotionSetup1端口,是在2D模型中Model项的修饰部分,在生成2D模型时系统自动设定。
经过对比实验,得出如下结论:如果MotionSetup1输入端口接入转速源,改变转速源的参数值不影响电机的输出变化;如果MotionSetup1输入端口接地,电机的输出结果与加入转速源的输出结果是一致的,因此,MotionSetup1输入端口不管接什么类型的源,均不影响电机的输出结果。
但是在2D模型中改变MotionSetup1的话,输出将随着输入的不同转速发生改变,于是就知道MotionSetup1输入端口取决于2D模型中的设定,跟Simplorer中的连接方式没有任何关系。
在此基础上,选定Simplorer中MotionSetup1输入端口接地。
④对于MotionSetup1.out的设定也是通过对比实验来确定:
在其他外电路连接完全相同的条件下,输出端口接地和接转动惯量的电机定
子电流如图1.7和1.8所示:
图1.7 输出端口接地的定子电流图
图1.8 输出端口接转动惯量的定子电流图
通过对比可以看出,接地的定子电流稳定的要快,而接转动惯量的定子电流稳定的要慢,但是和原来的导入RMxprt模型实验和自带电机模型试验的定子电流图保持一致。
也就是说,加入转动惯量以后,电机会仿真起动过程,这就是先前的实验中为什么要加入转动惯量MASS_ROT的原因了。
⑤本实验最关键的一点就是对电阻和电感数值的选取。
a、先前在线路中只加入一小电阻,考虑作为电源阻的功能,但是出来的定子电流相当不理想,如图1.9所示。
图1.9 单纯加入小电阻的定子电流图
从上图看出,虽然三相电流最终达到稳定,但是明显不符合要求:A相电流太大,B、C相电流相对较小,而且还是负值,这与理想中的空载电流相差很大。
b、如果加入小电阻和小电感,电流的波形与图1.9相差不大。
c、在前两组实验中,得到的结论是线路的电阻和电感不能随意设定,必须设置合适的参数才能得到正确的结果,在此基础上,考虑将电阻值设定为电机的定子电阻值,将电感值设定为定子的漏感。
执行新的实验方案,得到了正确的波形。
总结以上几点的分析,并结合一定数量的实验,得出图1.6电机的空载实验原理图:
A、B、C为三相电压,有效值为220V,相位依次相差
120;R1、R2、R3为电机的定子电阻,值为0.921989Ω;L1、L2、L3为定子侧的漏电感,值为0.00777424H;电机的三相输入接电源,三相输出连接在一起,MotionSetup1输入端口接地,输出端口接电机的转动惯量,值为0.0968218㎏㎡。
至此,线路连接完毕。
6.2.2 实验结果及分析
1、定子相电流波形如图1.10所示。
图1.10 空载实验定子相电流波形从图中可以看出,电机在0.8s左右完成起动过程,此后稳定在空载状态,空载电流的有效值为2.43A。
与RMxprt的空载电流2.40252A相比,差距不大。
2、电机转速图如图1.11所示
图1.11 电机的转速图
电机开始启动,转速逐渐上升,最终稳定在1500rpm。
1.3突加突卸负载的协同仿真
1.3.1实验原理图
实验原理如图1.12所示。
图1.12 突加突卸负载实验原理图
实验中,0~1s时电机完成起动并稳定在空载状态;在2s时加入负载,负载转矩为24 N·m,1~2s电机处于负载状态;在3s时卸去负载,电机处于空载状态,仿真时间为4s。
6.3.2实验结果及分析
1、定子相电流图如图1.13所示
图1.13 突加突卸实验定子相电流图
从图中可以看出,在0~2s时电机完成起动并稳定在空载状态;在2s时加入负载时,定子电流开始上升,最终在稳定的负载状态;在3s时卸去负载,电流开始下降,最终回到空载状态。
2、电机转速如图1.14所示
图1.14 突加突卸实验电机转速图
从图中可以看出,在0~2s时电机完成起动并稳定在空载状态,空载转速为1500 rpm;在2s时加入负载时,电机转速开始下降,最终运行在某一确定转速;在3s时卸去负载,转速开始上升,最终稳定在空载状态。
3、电机的转矩图如图1.15所示
图1.15 电机的转矩图
电机的转速图与先前的实验趋势相同。