GNSS输出NEMA协议解析
NMEA通讯协议详解
NMEA通讯协议详解说起NMEA协议,只要接触过GPS设备的人,或者说是要用到GPS设备研发的人都知道,这是一个很常用的GPS通讯协议,而且也有很多人遇到关于NEMA协议的一些问题,我忽然有一个想法,就是按照自己对这个协议的一些理解,写一点这方面的东西,看是不是能帮刚刚入门的人解答一些疑问,由于笔者水平有限,这个东西也只能算是一个简单介绍,就算是知识普及吧,希望能引高手出来大家一起讨论。
好了,言归正传,我们开始吧!GPS(全球定位系统)接收机与手持机之间的数据交换格式一般都由生产厂商缺省定制,其定义内容普通用户很难知晓,且不同品牌、不同型号的GPS接收机所配置的控制应用程序也因生产厂家的不同而不同。
所以,对于通用GPS应用软件,需要一个统一格式的数据标准,以解决与任意一台GPS的接口问题。
NMEA-0183数据标准就是解决这类问题的方案之一。
NMEA协议是为了在不同的GPS导航设备中建立统一的RTCM(海事无线电技术委员会)标准,它最初是由美国国家海洋电子协会(NMEA—The NationalMarine Electronics Association)制定的。
NMEA协议有0180、0182和0183这3种,0183可以认为是前两种的升级,也是目前使用最为广泛的一种NMEA通讯协议硬件接口符合NMEAO183标准的GPS接收机的硬件接口能够兼容计算机的RS-232C协议串口,然而,严格来说NMEA标准不是RS-232C,规范推荐依照EIA422(也称为RS-422)。
是一个与RS-232C不同的系统。
标准RS-232C采用负逻辑,即逻辑“1”表示-5V~-15v,逻辑“0”表示+5V~+15V,利用传输信号线和信号地之间的电压差进行传输。
而EIA-422是利用导线之间的信号电压差来传输信号的,其每个通道要用两条信号线,一条是逻辑“1”,~条是逻辑“0”,通过传输线驱动器和传输线接收器实现逻辑电平和电位差之间的转换,一般允许驱动器输出为±2V~±6V 。
nema协议解析
nema协议解析协议名称:NEMA协议解析一、引言NEMA(National Electrical Manufacturers Association,美国国家电器制造商协会)协议是一套用于电气设备和系统之间通信的标准化协议。
本协议解析旨在详细介绍NEMA协议的结构、功能和应用,以便读者对该协议有一个全面的了解。
二、协议结构NEMA协议采用分层结构,包括物理层、数据链路层、网络层和应用层。
1. 物理层物理层定义了NEMA协议在传输介质上的电气特性、连接器类型、传输速率等。
常用的物理层标准包括RS-232、RS-485、Ethernet等。
2. 数据链路层数据链路层负责将数据帧从发送方传输到接收方,确保数据的可靠性和完整性。
数据链路层采用帧格式进行数据传输,其中包括帧起始标识、地址字段、控制字段、数据字段和帧检验序列等。
3. 网络层网络层处理数据包的路由和转发,负责将数据从源节点传输到目标节点。
网络层使用IP地址来标识节点,并通过路由表来确定数据包的传输路径。
4. 应用层应用层定义了NEMA协议的具体应用,包括设备之间的通信协议、数据格式和命令集等。
常见的NEMA应用层协议包括NEMA 0183、NEMA 2000等。
三、协议功能NEMA协议具有以下主要功能:1. 数据传输NEMA协议支持设备之间的双向数据传输,包括实时数据、配置数据和控制命令等。
通过NEMA协议,设备可以实现数据的可靠传输和实时更新。
2. 设备控制NEMA协议定义了设备之间的控制命令和响应方式,支持设备的启动、停止、调节和状态查询等操作。
通过NEMA协议,用户可以方便地对设备进行远程控制。
3. 数据解析NEMA协议提供了数据解析的标准方法,使得接收方能够正确解析和处理发送方传输的数据。
数据解析包括数据格式的解析、数据字段的提取和数据转换等。
4. 网络管理NEMA协议支持网络管理功能,包括节点的发现、配置和监控等。
通过网络管理,用户可以对网络中的设备进行集中管理和监控,提高系统的可靠性和稳定性。
NEMA0183 协议分析
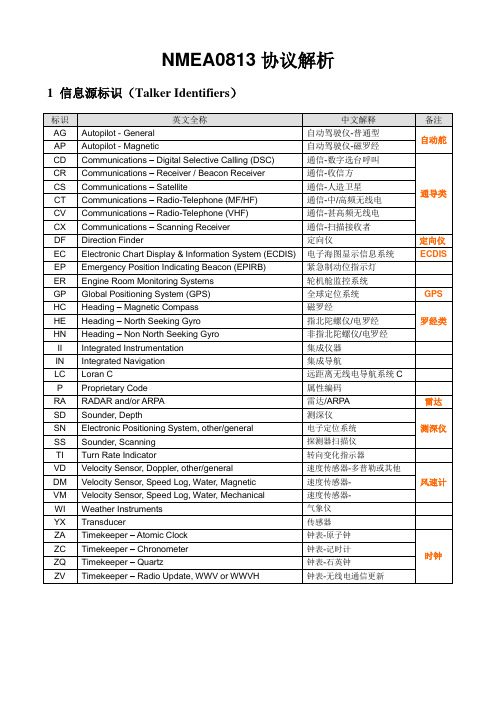
NMEA0813协议解析1 信息源标识(Talker Identifiers)2 语句标识符与格式(Sentence Identifiers and Formats)在此,只列出语句标识符及中文解释,具体格式内容详见各设备相关语句。
3 属性语句(Some Proprietary Sentences)4 NMEA0813 GPS相关4.1 信息源4.2 GPS相关语句NMEA 0183 输出语句包括GGA、GSA、GSV、RMC 、VTG、GLL。
可通过GPS串口调试软件发送相应的命令语句给GPS OEM 板,此后GPS OEM板会跟据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA 语句。
4.2.1 GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,0000*7D111 2 3 4 5 6 7 8 9 10| 12 13 14 15| | | | | | | | | | | | | | |$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh1) UTC时间2) 纬度3) N=北纬S=南纬4) 经度5) E=东经W=西经6) GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7) 使用卫星号00-128) 精度百分比9) 大地水准面高度10) 天线高度单位米12) 高度单位米13) 带差分GPS定位数据时间,未使用DGPS时此字段为空14) 差分站ID号0000-102315) 校验位4.2.2 GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9*091 2 3 14 15 16 17 18| | | | | | | |$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh1) 选择模式M=手动A=自动2) 当前状态1=无定位信息2=2D 3=3D3) 使用卫星号14) 使用卫星号2...14) 使用卫星号1215) 位置精度米16) 水平精度米17) 垂直精度米18) 校验位4.2.3 GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,*791 2 3 4 5 6 7 n| | | | | | | |$--GSV,x,x,x,x,x,x,x,...*hh1) GSV语句的总数目2) 当前GSV语句总数3) 显示卫星的总数目4) 卫星的PRV号星号5) 卫星仰角6) 卫星旋角/方位7) 信噪比... 更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰角<6>旋角<7>信噪比n) 校验位4.2.4 RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,*0C $GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A*7D121 2 3 4 5 6 7 8 9 10 11 || | | | | | | | | | | | $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh1) UTC时间2) 状态位V=导航报警接收器3) 纬度4) N=北纬S=南纬6) E=东经W=西经7) 对地速度哩/小时8) 航迹度数真实9) 日期日月年10) 磁变度数11) E=东经W=西经12) 校验位4.2.5 VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K*601 2 3 4 5 6 7 8 9| | | | | | | | |$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh1) 轨迹度数2) T=真实3) 轨迹度数4) M=磁罗经5) 速度哩/小时6) N=哩/小时7) 速度千米每小时8) K=千米每小时9) 校验位4.2.6 GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V*3A1 2 3 4 5 6 7| | | | | | | $--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh1) 纬度2) N=北纬S=南纬3) 经度4) E=东经W=西经5) UTC时间6) 状态位A-数据有效V-数据无效7) 校验位4.2.7 ZDA格式解析例:$GPZDA,062321,03,02,2022,,*4F1 2 3 4 5 6 7| | | | | | |$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh1) 当地时区分钟描述,类似于当地时间2) 当地时区描述0- +/-13小时3) 年4) 月1-125) 日1-316) UTC时间4.2.8 RMO格式解析1 2 3| | |$PGRMO,ccccc,c*hh1) 目标语句描述2) 目标语句模式0=指定语句不可用1=指定语句可用2=所有不可用3=所有输出语句可用3) 校验位4.2.9 RME格式解析1 2 3 4 5 6 7| | | | | | |$PGRME,x.x,M,x.x,M,x.x,M*hh1) Estimated horizontal position error (HPE) 水平估计位置错误2) Unit, metres 单位米3) Estimated vertical error (VPE) 垂直估计错误4) Unit, metres 单位米5) Overall spherical equivalent position error 全球等效位置错误6) Unit, metres 单位米7) Checksum 校验位4.2.10 RMF格式解析10 12 151 2 3 4 5 6 7 8 9 | 11| 13 14 |16| | | | | | | | | | | | | | | | $PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,c*hh1) GPS week number (0 - 1023) 定位周期号0-10232) GPS seconds (0 - 604799) GPS秒0-6047993) UTC date of position fix 安装位置的UTC日期4) UTC time of position fix 安装位置的UTC时间5) GPS leap second count GPS闰秒数6) Latitude 纬度7) N or S 北纬或南纬8) Longitude 经度9) E or W 东经或西经10) Mode 模式M=手动A=自动11) Fix type 安装类型0=未固定1=2D固定2=3D位置12) Speed over ground, 0 to 999 kilometers/hour 对地速度0-999千米每小时13) Course over ground, 0 to 359 degrees, true 对地方位0-359度真实14) Position dilution of precision, 0 to 9 (rounded to nearest integer value) 位置精确百分比0-915) Time dilution of precision, 0 to 9 (rounded to nearest integer value) 时间精确百分比0-916) Checksum 校验位4.2.11 RMI格式解析1 2 3 4 5 6 7| | | | | | |$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmss*hh1) Latitude 纬度3) Longitude 经度4) E or W 东经或西经5) Current UTC date 当前UTC日期6) Current UTC time 当前UTC时间7) Checksum 校验位4.2.12 RMM格式解析1 2| |$PGRMM,c---c*hh1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o) 现行水平数据-WGS-842) Checksum 校验位4.2.13 RMT格式解析1 2 3 4 5 6 7 8 9 10| | | | | | | | | |$PGRMT,c...c,c,c,c,c,c,c,x.x,c*hh1) Product, model and software version 产品、模型、软件版本2) Rom checksum test ROM校验检测P=通过F=失败3) Receiver failure discrete 接收器失败P=通过F=失败4) Stored data lost 存储数据丢失R=保持L=丢失5) Real time clock lost 真实时间丢失R=保持L=丢失6) oscillator drift discrete 振荡频率漂移P=通过F=检测出额外的漂移7) Data collection discrete 数据搜集C=正在搜集中如果没有搜集则为NULL8) Board temperature in degrees C 面板温度摄氏度9) Board configuration data 面板配置数据R=保持L=丢失10) Checksum 校验位4.2.14 RMV格式解析1 2 3 4| | | |$PGRMV,x.x,x.x,x.x*hh1) True east velocity, -999.9 to 9999.9 meters/second 真实的向东速率2) True north velocity, -999.9 to 9999.9 meters/second 真实的向北速率3) Up velocity, -999.9 to 9999.9 meters/second 向上速率4) Checksum 校验位4.2.15 RMZ格式解析1 2 3 4| | | |$PGRMZ,x.x,f,h*hh1) Altitude 海拔高度2) Unit, feets 单位英尺3) Position fix dimensions 位置安装尺寸2 user altitude 用户高度3 GPS altitude GPS高度4) Checksum 校验位5.1 信息源5.2 罗经相关语句罗经分为磁罗经和电罗经两种,航海船舶一般都会安装两种罗经。
GNSS输出NEMA协议解析要点
GNSS输出NEMA协议解析要点GNSS(全球导航卫星系统)是一种使用卫星定位技术的导航系统,它包括全球定位系统(GPS)、伽利略、格洛纳斯和北斗系统。
GNSS设备输出的数据通常使用NEMA协议进行解析和处理。
在本文中,我们将探讨解析NEMA协议数据的关键要点。
首先,NEMA协议是一种文本协议,它定义了GNSS设备输出的数据格式和语法。
这些数据通常以ASCII字符串的形式发送。
因此,解析NEMA协议数据的第一步是将其转换为可读的文本。
每条NEMA消息都以"$"字符开头,并以换行符"\n"结束。
第二,NEMA协议定义了几种常见的消息类型,包括GGA、RMC、VTG、GSA等。
每种消息类型都包含了特定的定位信息和状态参数。
解析NEMA协议数据的关键在于理解每种消息类型的含义和字段结构。
以GGA消息为例,它包含了有关位置、水平定位精度和卫星信号强度等参数的信息。
GGA消息的字段结构如下:"$GPGGA,hhmmss.ss,ddmm.dddd,N,dddmm.dddd,E,q,ns,s.a,h.h,d.d, M,x.x,M,x.x,xxxx*hh"其中,第二个字段hhmmss.ss表示UTC时间,第三个字段ddmm.dddd和第五个字段dddmm.dddd分别表示纬度和经度。
第七个字段q表示定位质量指示器,值为0表示未定位,值为1表示GPS定位,值为2表示差分GPS定位。
后面的字段分别表示海拔高度、大地水准面相对椭球面的高度,以及DGPS数据的年、日、小时和分钟。
第三,解析NEMA协议数据时需要注意数据的校验和检查。
每条NEMA消息的结尾都有一个校验和字段,用于验证数据的完整性。
校验和字段前面的"*"字符后面是一个两位十六进制数,表示校验和的值。
我们可以使用异或操作来计算校验和,并将计算结果与校验和字段进行比较,以确保数据的准确性。
GNSS输出NEMA协议解析
GNSS输出NEMA协议解析GNSS (Global Navigation Satellite System)是一种通过卫星系统来确定地理位置和导航的技术。
NMEA (National Marine Electronics Association)协议是一种常用于GNSS设备输出数据的标准协议。
NMEA协议定义了一系列ASCII字符和格式,用于将GNSS设备收集到的数据信息进行传输和解析。
下面将对NMEA协议进行详细解析。
NMEA协议由一系列以$符号开头的信息语句组成。
每个消息语句都具有特定的数据格式和含义。
以下是一些常见的NMEA消息语句:1. GGA (Global Positioning System Fix Data)语句:提供了定位的基本信息,如UTC时间、纬度、经度、定位质量指示和卫星使用情况等。
2. GSA (GNSS DOP and Active Satellites)语句:提供了定位解的几何因素和卫星使用情况。
DOP (Dilution of Precision)是一种指标,用于评估定位解的精确度。
3. GSV (GNSS Satellites in View)语句:提供了当前可见的卫星编号、仰角、方位角和信噪比等信息。
每个GSV语句通常只提供四个卫星的信息,因此需要多个GSV语句才能获取全部信息。
5. VTG (Course over Ground and Ground Speed)语句:提供了相对于地面的航向和速度信息。
这对于航海和其他需要方向和速度信息的应用非常有用。
以上仅是常见的一些NMEA消息语句,实际上还有很多其他类型的消息语句,例如GLL (Geographic Position - Latitude/Longitude)、ZDA (Time & Date)等。
每个消息语句都有特定的格式和字段定义。
NMEA消息语句的格式如下:$XXYYY,field1,field2,...,fieldN*checksum<CR><LF>其中,$表示语句的开始,XXYYY是语句的类型,field1到fieldN是语句中的字段,checksum是校验和,<CR>和<LF>是回车和换行符。
【GPS】NEMA协议

使用中的卫星数目07 00 to 12
水平稀释精度1.0 0.5 ~ 99.9米
海拔高度9.0 米-9999.9至99999.9米
单位M 米
大地水准面分隔米
单位M 米
差分修正秒0表非DGPS
基地台代码0000
总和检查码*18
讯息终点
定位代号指示器
水平精度稀释值1.0 0.5 ~ 99.9
垂直精度稀释值1.5 0.5 ~ 99.9
*33
讯息终点
1. Satellite used in solution.
8
数值叙述
M 手动– 只能于二维定位或三维定位模式运作
A 自动– 允许自动切换二维定位或三维定位模式
表2-6 模式2
标准定位时间161229.487 时时分分秒秒.秒秒秒
定位状态A A= 资料有效; V = 资料无效
纬度3723.2475 度度分分.分分分分
北/南半球指示器N 北半球(N)或南半球(S)
经度12158.3416 度度度分分.分分分分
东/西半球指示器W 东半球(E)或西半球(W)
对地速度0.13 节
数值叙述
0 未定位或无效的定位
1 GPS SPS格式, 己定位
2 差分修正, SPS格式, 已定位
3 GPS PPS格式, 己定位
2.2.1.2 偏差信息(GNSS DOP) 及卫星状态(GSA)
输出范例:
$GPGSA,A,3,07,02,26,27,09,04,15, , , , , ,1.8,1.0,1.5*33
对地方向309.62 度实际值
GPS电文NEMA0183协议-最新解析

GPS(NMEA0183)规范电文NMEA0183协议是美国国家海洋电子协会(NationaIMarine Electronlcs Association)制定的GPS接口协议标准。
NMEA0183定义了若干代表不同含义的语句,每个语句实际上是一个ASCII码串。
这种码直观,易于识别和应用。
在试验中,不需要了解NMEA0183通信协议的全部信息,仅需要从中挑选出需要的那部分定位数据,其余的信息忽略掉。
一个完整的NEMA0183语句是从起始符“$GPGGA”到终止符“<CR><LF>”为止的一段字符串。
需要掌握的信息是经纬度、经纬度方向、GPS 定位状态和接收信号的时间。
所以当接收到这样一个完整的NEMA0183语句时,提取有用信息的方法是:先判定起始符$GPGGA的位置,从起始符开始读人数据,再通过异或校验后的语句中寻找字符“,”,然后截取前后两个“,”之间的字符(串)获得所关心的数据,并以回车符为一个CPS语句的终止符,得到一个完整的GPS信号。
在提取出的GPS语句中,找寻经纬度所在的逗号位置,读出经纬度坐标,再将经纬度坐标进行度数的转换。
因为地图的坐标是以度数为标准的。
”GPS软件模拟电文如下:$GPZDA,194633.656,18,03,2008,00,00*59$GPGGA,194633.656,3150.300000,N,12001.433333,E,1,4,3,2,M,1,M,,*48 $GPGLL,3150.300000,N,12001.433333,E,194633.656,A,A*57$GPVTG,0,T,0,M,1.62,N,3.728,K,A*20$GPRMC,194633.656,A,3150.300000,N,12001.433333,E,1.62,0,180308,0,E,A* 3C$GPGSA,A,3,1,2,3,4,,,,,,,,,2,3,2*2B$GPGSV,1,1,4,1,0,0,0,2,0,0,0,3,0,0,0,4,0,0,0*49$GPWPL,3153.007167,N,12016.008833,E,TEST*5A$GPRTE,1,1,C,0,TEST*1DGPS固定数据输出语句($GPGGA)这是一帧GPS定位的主要数据,也是使用最广的数据。
NEMA0183 协议分析
NMEA0813协议解析1 信息源标识(Talker Identifiers)2 语句标识符与格式(Sentence Identifiers and Formats)在此,只列出语句标识符及中文解释,具体格式内容详见各设备相关语句。
3 属性语句(Some Proprietary Sentences)4 NMEA0813 GPS相关4.1 信息源4.2 GPS相关语句NMEA 0183 输出语句包括GGA、GSA、GSV、RMC 、VTG、GLL。
可通过GPS串口调试软件发送相应的命令语句给GPS OEM 板,此后GPS OEM板会跟据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA 语句。
4.2.1 GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,0000*7D111 2 3 4 5 6 7 8 9 10| 12 13 14 15| | | | | | | | | | | | | | |$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh1) UTC时间2) 纬度3) N=北纬S=南纬4) 经度5) E=东经W=西经6) GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7) 使用卫星号00-128) 精度百分比9) 大地水准面高度10) 天线高度单位米12) 高度单位米13) 带差分GPS定位数据时间,未使用DGPS时此字段为空14) 差分站ID号0000-102315) 校验位4.2.2 GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9*091 2 3 14 15 16 17 18| | | | | | | |$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh1) 选择模式M=手动A=自动2) 当前状态1=无定位信息2=2D 3=3D3) 使用卫星号14) 使用卫星号2...14) 使用卫星号1215) 位置精度米16) 水平精度米17) 垂直精度米18) 校验位4.2.3 GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,*791 2 3 4 5 6 7 n| | | | | | | |$--GSV,x,x,x,x,x,x,x,...*hh1) GSV语句的总数目2) 当前GSV语句总数3) 显示卫星的总数目4) 卫星的PRV号星号5) 卫星仰角6) 卫星旋角/方位7) 信噪比... 更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰角<6>旋角<7>信噪比n) 校验位4.2.4 RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,*0C $GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A*7D121 2 3 4 5 6 7 8 9 10 11 || | | | | | | | | | | | $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh1) UTC时间2) 状态位V=导航报警接收器3) 纬度4) N=北纬S=南纬6) E=东经W=西经7) 对地速度哩/小时8) 航迹度数真实9) 日期日月年10) 磁变度数11) E=东经W=西经12) 校验位4.2.5 VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K*601 2 3 4 5 6 7 8 9| | | | | | | | |$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh1) 轨迹度数2) T=真实3) 轨迹度数4) M=磁罗经5) 速度哩/小时6) N=哩/小时7) 速度千米每小时8) K=千米每小时9) 校验位4.2.6 GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V*3A1 2 3 4 5 6 7| | | | | | | $--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh1) 纬度2) N=北纬S=南纬3) 经度4) E=东经W=西经5) UTC时间6) 状态位A-数据有效V-数据无效7) 校验位4.2.7 ZDA格式解析例:$GPZDA,062321,03,02,2022,,*4F1 2 3 4 5 6 7| | | | | | |$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh1) 当地时区分钟描述,类似于当地时间2) 当地时区描述0- +/-13小时3) 年4) 月1-125) 日1-316) UTC时间4.2.8 RMO格式解析1 2 3| | |$PGRMO,ccccc,c*hh1) 目标语句描述2) 目标语句模式0=指定语句不可用1=指定语句可用2=所有不可用3=所有输出语句可用3) 校验位4.2.9 RME格式解析1 2 3 4 5 6 7| | | | | | |$PGRME,x.x,M,x.x,M,x.x,M*hh1) Estimated horizontal position error (HPE) 水平估计位置错误2) Unit, metres 单位米3) Estimated vertical error (VPE) 垂直估计错误4) Unit, metres 单位米5) Overall spherical equivalent position error 全球等效位置错误6) Unit, metres 单位米7) Checksum 校验位4.2.10 RMF格式解析10 12 151 2 3 4 5 6 7 8 9 | 11| 13 14 |16| | | | | | | | | | | | | | | | $PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,c*hh1) GPS week number (0 - 1023) 定位周期号0-10232) GPS seconds (0 - 604799) GPS秒0-6047993) UTC date of position fix 安装位置的UTC日期4) UTC time of position fix 安装位置的UTC时间5) GPS leap second count GPS闰秒数6) Latitude 纬度7) N or S 北纬或南纬8) Longitude 经度9) E or W 东经或西经10) Mode 模式M=手动A=自动11) Fix type 安装类型0=未固定1=2D固定2=3D位置12) Speed over ground, 0 to 999 kilometers/hour 对地速度0-999千米每小时13) Course over ground, 0 to 359 degrees, true 对地方位0-359度真实14) Position dilution of precision, 0 to 9 (rounded to nearest integer value) 位置精确百分比0-915) Time dilution of precision, 0 to 9 (rounded to nearest integer value) 时间精确百分比0-916) Checksum 校验位4.2.11 RMI格式解析1 2 3 4 5 6 7| | | | | | |$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmss*hh1) Latitude 纬度3) Longitude 经度4) E or W 东经或西经5) Current UTC date 当前UTC日期6) Current UTC time 当前UTC时间7) Checksum 校验位4.2.12 RMM格式解析1 2| |$PGRMM,c---c*hh1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o) 现行水平数据-WGS-842) Checksum 校验位4.2.13 RMT格式解析1 2 3 4 5 6 7 8 9 10| | | | | | | | | |$PGRMT,c...c,c,c,c,c,c,c,x.x,c*hh1) Product, model and software version 产品、模型、软件版本2) Rom checksum test ROM校验检测P=通过F=失败3) Receiver failure discrete 接收器失败P=通过F=失败4) Stored data lost 存储数据丢失R=保持L=丢失5) Real time clock lost 真实时间丢失R=保持L=丢失6) oscillator drift discrete 振荡频率漂移P=通过F=检测出额外的漂移7) Data collection discrete 数据搜集C=正在搜集中如果没有搜集则为NULL8) Board temperature in degrees C 面板温度摄氏度9) Board configuration data 面板配置数据R=保持L=丢失10) Checksum 校验位4.2.14 RMV格式解析1 2 3 4| | | |$PGRMV,x.x,x.x,x.x*hh1) True east velocity, -999.9 to 9999.9 meters/second 真实的向东速率2) True north velocity, -999.9 to 9999.9 meters/second 真实的向北速率3) Up velocity, -999.9 to 9999.9 meters/second 向上速率4) Checksum 校验位4.2.15 RMZ格式解析1 2 3 4| | | |$PGRMZ,x.x,f,h*hh1) Altitude 海拔高度2) Unit, feets 单位英尺3) Position fix dimensions 位置安装尺寸2 user altitude 用户高度3 GPS altitude GPS高度4) Checksum 校验位5.1 信息源5.2 罗经相关语句罗经分为磁罗经和电罗经两种,航海船舶一般都会安装两种罗经。
GNSS输出NEMA协议解析

GNSS导航芯片输出NEMA协议解析1.NEMA协议的由来NMEA协议是为了在不同的GPS(全球定位系统)导航设备中建立统一的BTCM(海事无线电技术委员会)标准,由美国国家海洋电子协会(NMEA-The National Marine Electronics Associa-tion)制定的一套通讯协议。
GPS接收机根据NMEA-0183协议的标准规范,将位置、速度等信息通过串口传送到PC机、PDA等设备。
NMEA-0183协议是GPS接收机应当遵守的标准协议,也是目前GPS接收机上使用最广泛的协议,大多数常见的GPS接收机、GPS数据处理软件、导航软件都遵守或者至少兼容这个协议。
NMEA-0183协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL等。
下面给出这些常用NMEA-0183语句的字段定义解释。
$GPGGA例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F字段0:$GPGGA,语句ID,表明该语句为Global Positioning System Fix Data(GGA)GPS 定位信息字段1:UTC 时间,hhmmss.sss,时分秒格式字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段3:纬度N(北纬)或S(南纬)字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段5:经度E(东经)或W(西经)字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算字段7:正在使用的卫星数量(00 - 12)(前导位数不足则补0)字段8:HDOP水平精度因子(0.5 - 99.9)字段9:海拔高度(-9999.9 - 99999.9)字段10:地球椭球面相对大地水准面的高度字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)字段12:差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空)字段13:校验值$GPGSA例:$GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A字段0:$GPGSA,语句ID,表明该语句为GPS DOP and Active Satellites(GSA)当前卫星信息字段1:定位模式,A=自动手动2D/3D,M=手动2D/3D字段2:定位类型,1=未定位,2=2D定位,3=3D定位字段3:PRN码(伪随机噪声码),第1信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段4:PRN码(伪随机噪声码),第2信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段5:PRN码(伪随机噪声码),第3信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段6:PRN码(伪随机噪声码),第4信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段7:PRN码(伪随机噪声码),第5信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段8:PRN码(伪随机噪声码),第6信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段9:PRN码(伪随机噪声码),第7信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段10:PRN码(伪随机噪声码),第8信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段11:PRN码(伪随机噪声码),第9信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段12:PRN码(伪随机噪声码),第10信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段13:PRN码(伪随机噪声码),第11信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段14:PRN码(伪随机噪声码),第12信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段15:PDOP综合位置精度因子(0.5 - 99.9)字段16:HDOP水平精度因子(0.5 - 99.9)字段17:VDOP垂直精度因子(0.5 - 99.9)字段18:校验值$GPGSV例:$GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70字段0:$GPGSV,语句ID,表明该语句为GPS Satellites in View(GSV)可见卫星信息字段1:本次GSV语句的总数目(1 - 3)字段2:本条GSV语句是本次GSV语句的第几条(1 - 3)字段3:当前可见卫星总数(00 - 12)(前导位数不足则补0)字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段5:卫星仰角(00 - 90)度(前导位数不足则补0)字段6:卫星方位角(00 - 359)度(前导位数不足则补0)字段7:信噪比(00-99)dbHz字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段9:卫星仰角(00 - 90)度(前导位数不足则补0)字段10:卫星方位角(00 - 359)度(前导位数不足则补0)字段11:信噪比(00-99)dbHz字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段13:卫星仰角(00 - 90)度(前导位数不足则补0)字段14:卫星方位角(00 - 359)度(前导位数不足则补0)字段15:信噪比(00-99)dbHz字段16:校验值NMEA0183标准语句另一种表达方式详解1、Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF><1> UTC时间,hhmmss(时分秒)格式<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3> 纬度半球N(北半球)或S(南半球)<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5> 经度半球E(东经)或W(西经)<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算<7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)<9> 海拔高度(-9999.9~99999.9)<10> 地球椭球面相对大地水准面的高度<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)2、GPS DOP and Active Satellites(GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh<CR><LF ><1> 模式,M=手动,A=自动<2> 定位类型,1=没有定位,2=2D定位,3=3D定位<3> PRN码(伪随机噪声码),正在用于解算位置的卫星号(01~32,前面的0也将被传输)。
nema协议解析

nema协议解析协议名称:NEMA协议解析一、背景介绍NEMA(National Electrical Manufacturers Association)是美国国家电气制造商协会的缩写,成立于1926年。
NEMA协会是美国电气和电子制造商的贸易协会,致力于制定和推广电气和电子设备的标准。
NEMA协议是一种用于电气设备和系统之间通信的协议,它定义了数据传输的格式、通信协议和通信接口等规范。
二、协议目的本协议的目的是为了解析NEMA协议的标准格式,详细描述协议中所涉及的数据传输格式、通信协议和通信接口等要求,以便各方能够准确理解和遵守该协议。
三、协议内容1. 数据传输格式NEMA协议使用二进制格式进行数据传输。
数据包由帧头、数据内容和帧尾组成。
帧头和帧尾是固定的字节序列,用于标识数据包的开始和结束。
数据内容包括数据类型、数据长度和实际数据。
2. 通信协议NEMA协议采用基于请求-应答模式的通信协议。
通信的发起方发送请求消息,接收方收到请求后进行处理,并返回应答消息。
请求消息和应答消息的格式相同,只是消息的类型字段不同。
3. 通信接口NEMA协议定义了通信接口的物理层和逻辑层要求。
物理层要求包括通信介质、传输速率和连接方式等。
逻辑层要求包括数据包格式、协议命令和错误处理等。
四、协议使用1. 协议交互流程(1)发起方发送请求消息给接收方。
(2)接收方收到请求消息后进行处理,并生成应答消息。
(3)接收方发送应答消息给发起方。
(4)发起方收到应答消息后进行处理。
2. 数据包格式数据包格式如下:帧头:固定字节序列,用于标识数据包的开始。
数据类型:标识数据的类型,如温度、湿度等。
数据长度:数据内容的长度,以字节为单位。
实际数据:具体的数据内容。
帧尾:固定字节序列,用于标识数据包的结束。
3. 协议命令NEMA协议定义了一系列的协议命令,用于请求不同的操作。
每个命令都有特定的格式和参数要求。
4. 错误处理在通信过程中,如果发生错误,接收方需要发送错误消息给发起方,以便发起方进行错误处理。
NEMA0183 协议分析
NMEA0813协议解析1 信息源标识(Talker Identifiers)2 语句标识符与格式(Sentence Identifiers and Formats)在此,只列出语句标识符及中文解释,具体格式内容详见各设备相关语句。
3 属性语句(Some Proprietary Sentences)4 NMEA0813 GPS相关4.1 信息源4.2 GPS相关语句NMEA 0183 输出语句包括GGA、GSA、GSV、RMC 、VTG、GLL。
可通过GPS串口调试软件发送相应的命令语句给GPS OEM 板,此后GPS OEM板会跟据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA 语句。
4.2.1 GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,0000*7D111 2 3 4 5 6 7 8 9 10| 12 13 14 15| | | | | | | | | | | | | | |$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh1) UTC时间2) 纬度3) N=北纬S=南纬4) 经度5) E=东经W=西经6) GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7) 使用卫星号00-128) 精度百分比9) 大地水准面高度10) 天线高度单位米12) 高度单位米13) 带差分GPS定位数据时间,未使用DGPS时此字段为空14) 差分站ID号0000-102315) 校验位4.2.2 GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9*091 2 3 14 15 16 17 18| | | | | | | |$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh1) 选择模式M=手动A=自动2) 当前状态1=无定位信息2=2D 3=3D3) 使用卫星号14) 使用卫星号2...14) 使用卫星号1215) 位置精度米16) 水平精度米17) 垂直精度米18) 校验位4.2.3 GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,*791 2 3 4 5 6 7 n| | | | | | | |$--GSV,x,x,x,x,x,x,x,...*hh1) GSV语句的总数目2) 当前GSV语句总数3) 显示卫星的总数目4) 卫星的PRV号星号5) 卫星仰角6) 卫星旋角/方位7) 信噪比... 更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰角<6>旋角<7>信噪比n) 校验位4.2.4 RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,*0C $GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A*7D121 2 3 4 5 6 7 8 9 10 11 || | | | | | | | | | | | $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh1) UTC时间2) 状态位V=导航报警接收器3) 纬度4) N=北纬S=南纬6) E=东经W=西经7) 对地速度哩/小时8) 航迹度数真实9) 日期日月年10) 磁变度数11) E=东经W=西经12) 校验位4.2.5 VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K*601 2 3 4 5 6 7 8 9| | | | | | | | |$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh1) 轨迹度数2) T=真实3) 轨迹度数4) M=磁罗经5) 速度哩/小时6) N=哩/小时7) 速度千米每小时8) K=千米每小时9) 校验位4.2.6 GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V*3A1 2 3 4 5 6 7| | | | | | | $--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh1) 纬度2) N=北纬S=南纬3) 经度4) E=东经W=西经5) UTC时间6) 状态位A-数据有效V-数据无效7) 校验位4.2.7 ZDA格式解析例:$GPZDA,062321,03,02,2022,,*4F1 2 3 4 5 6 7| | | | | | |$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh1) 当地时区分钟描述,类似于当地时间2) 当地时区描述0- +/-13小时3) 年4) 月1-125) 日1-316) UTC时间4.2.8 RMO格式解析1 2 3| | |$PGRMO,ccccc,c*hh1) 目标语句描述2) 目标语句模式0=指定语句不可用1=指定语句可用2=所有不可用3=所有输出语句可用3) 校验位4.2.9 RME格式解析1 2 3 4 5 6 7| | | | | | |$PGRME,x.x,M,x.x,M,x.x,M*hh1) Estimated horizontal position error (HPE) 水平估计位置错误2) Unit, metres 单位米3) Estimated vertical error (VPE) 垂直估计错误4) Unit, metres 单位米5) Overall spherical equivalent position error 全球等效位置错误6) Unit, metres 单位米7) Checksum 校验位4.2.10 RMF格式解析10 12 151 2 3 4 5 6 7 8 9 | 11| 13 14 |16| | | | | | | | | | | | | | | | $PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,c*hh1) GPS week number (0 - 1023) 定位周期号0-10232) GPS seconds (0 - 604799) GPS秒0-6047993) UTC date of position fix 安装位置的UTC日期4) UTC time of position fix 安装位置的UTC时间5) GPS leap second count GPS闰秒数6) Latitude 纬度7) N or S 北纬或南纬8) Longitude 经度9) E or W 东经或西经10) Mode 模式M=手动A=自动11) Fix type 安装类型0=未固定1=2D固定2=3D位置12) Speed over ground, 0 to 999 kilometers/hour 对地速度0-999千米每小时13) Course over ground, 0 to 359 degrees, true 对地方位0-359度真实14) Position dilution of precision, 0 to 9 (rounded to nearest integer value) 位置精确百分比0-915) Time dilution of precision, 0 to 9 (rounded to nearest integer value) 时间精确百分比0-916) Checksum 校验位4.2.11 RMI格式解析1 2 3 4 5 6 7| | | | | | |$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmss*hh1) Latitude 纬度3) Longitude 经度4) E or W 东经或西经5) Current UTC date 当前UTC日期6) Current UTC time 当前UTC时间7) Checksum 校验位4.2.12 RMM格式解析1 2| |$PGRMM,c---c*hh1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o) 现行水平数据-WGS-842) Checksum 校验位4.2.13 RMT格式解析1 2 3 4 5 6 7 8 9 10| | | | | | | | | |$PGRMT,c...c,c,c,c,c,c,c,x.x,c*hh1) Product, model and software version 产品、模型、软件版本2) Rom checksum test ROM校验检测P=通过F=失败3) Receiver failure discrete 接收器失败P=通过F=失败4) Stored data lost 存储数据丢失R=保持L=丢失5) Real time clock lost 真实时间丢失R=保持L=丢失6) oscillator drift discrete 振荡频率漂移P=通过F=检测出额外的漂移7) Data collection discrete 数据搜集C=正在搜集中如果没有搜集则为NULL8) Board temperature in degrees C 面板温度摄氏度9) Board configuration data 面板配置数据R=保持L=丢失10) Checksum 校验位4.2.14 RMV格式解析1 2 3 4| | | |$PGRMV,x.x,x.x,x.x*hh1) True east velocity, -999.9 to 9999.9 meters/second 真实的向东速率2) True north velocity, -999.9 to 9999.9 meters/second 真实的向北速率3) Up velocity, -999.9 to 9999.9 meters/second 向上速率4) Checksum 校验位4.2.15 RMZ格式解析1 2 3 4| | | |$PGRMZ,x.x,f,h*hh1) Altitude 海拔高度2) Unit, feets 单位英尺3) Position fix dimensions 位置安装尺寸2 user altitude 用户高度3 GPS altitude GPS高度4) Checksum 校验位5.1 信息源5.2 罗经相关语句罗经分为磁罗经和电罗经两种,航海船舶一般都会安装两种罗经。
NEMA0183 协议分析
NMEA0813协议解析1 信息源标识(Talker Identifiers)2 语句标识符与格式(Sentence Identifiers and Formats)在此,只列出语句标识符及中文解释,具体格式内容详见各设备相关语句。
3 属性语句(Some Proprietary Sentences)4 NMEA0813 GPS相关4.1 信息源4.2 GPS相关语句NMEA 0183 输出语句包括GGA、GSA、GSV、RMC 、VTG、GLL。
可通过GPS串口调试软件发送相应的命令语句给GPS OEM 板,此后GPS OEM板会跟据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA 语句。
4.2.1 GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,0000*7D111 2 3 4 5 6 7 8 9 10| 12 13 14 15| | | | | | | | | | | | | | |$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh1) UTC时间2) 纬度3) N=北纬S=南纬4) 经度5) E=东经W=西经6) GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7) 使用卫星号00-128) 精度百分比9) 大地水准面高度10) 天线高度单位米12) 高度单位米13) 带差分GPS定位数据时间,未使用DGPS时此字段为空14) 差分站ID号0000-102315) 校验位4.2.2 GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9*091 2 3 14 15 16 17 18| | | | | | | |$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh1) 选择模式M=手动A=自动2) 当前状态1=无定位信息2=2D 3=3D3) 使用卫星号14) 使用卫星号2...14) 使用卫星号1215) 位置精度米16) 水平精度米17) 垂直精度米18) 校验位4.2.3 GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,*791 2 3 4 5 6 7 n| | | | | | | |$--GSV,x,x,x,x,x,x,x,...*hh1) GSV语句的总数目2) 当前GSV语句总数3) 显示卫星的总数目4) 卫星的PRV号星号5) 卫星仰角6) 卫星旋角/方位7) 信噪比... 更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰角<6>旋角<7>信噪比n) 校验位4.2.4 RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,*0C $GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A*7D121 2 3 4 5 6 7 8 9 10 11 || | | | | | | | | | | | $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh1) UTC时间2) 状态位V=导航报警接收器3) 纬度4) N=北纬S=南纬6) E=东经W=西经7) 对地速度哩/小时8) 航迹度数真实9) 日期日月年10) 磁变度数11) E=东经W=西经12) 校验位4.2.5 VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K*601 2 3 4 5 6 7 8 9| | | | | | | | |$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh1) 轨迹度数2) T=真实3) 轨迹度数4) M=磁罗经5) 速度哩/小时6) N=哩/小时7) 速度千米每小时8) K=千米每小时9) 校验位4.2.6 GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V*3A1 2 3 4 5 6 7| | | | | | | $--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh1) 纬度2) N=北纬S=南纬3) 经度4) E=东经W=西经5) UTC时间6) 状态位A-数据有效V-数据无效7) 校验位4.2.7 ZDA格式解析例:$GPZDA,062321,03,02,2022,,*4F1 2 3 4 5 6 7| | | | | | |$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh1) 当地时区分钟描述,类似于当地时间2) 当地时区描述0- +/-13小时3) 年4) 月1-125) 日1-316) UTC时间4.2.8 RMO格式解析1 2 3| | |$PGRMO,ccccc,c*hh1) 目标语句描述2) 目标语句模式0=指定语句不可用1=指定语句可用2=所有不可用3=所有输出语句可用3) 校验位4.2.9 RME格式解析1 2 3 4 5 6 7| | | | | | |$PGRME,x.x,M,x.x,M,x.x,M*hh1) Estimated horizontal position error (HPE) 水平估计位置错误2) Unit, metres 单位米3) Estimated vertical error (VPE) 垂直估计错误4) Unit, metres 单位米5) Overall spherical equivalent position error 全球等效位置错误6) Unit, metres 单位米7) Checksum 校验位4.2.10 RMF格式解析10 12 151 2 3 4 5 6 7 8 9 | 11| 13 14 |16| | | | | | | | | | | | | | | | $PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,c*hh1) GPS week number (0 - 1023) 定位周期号0-10232) GPS seconds (0 - 604799) GPS秒0-6047993) UTC date of position fix 安装位置的UTC日期4) UTC time of position fix 安装位置的UTC时间5) GPS leap second count GPS闰秒数6) Latitude 纬度7) N or S 北纬或南纬8) Longitude 经度9) E or W 东经或西经10) Mode 模式M=手动A=自动11) Fix type 安装类型0=未固定1=2D固定2=3D位置12) Speed over ground, 0 to 999 kilometers/hour 对地速度0-999千米每小时13) Course over ground, 0 to 359 degrees, true 对地方位0-359度真实14) Position dilution of precision, 0 to 9 (rounded to nearest integer value) 位置精确百分比0-915) Time dilution of precision, 0 to 9 (rounded to nearest integer value) 时间精确百分比0-916) Checksum 校验位4.2.11 RMI格式解析1 2 3 4 5 6 7| | | | | | |$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmss*hh1) Latitude 纬度3) Longitude 经度4) E or W 东经或西经5) Current UTC date 当前UTC日期6) Current UTC time 当前UTC时间7) Checksum 校验位4.2.12 RMM格式解析1 2| |$PGRMM,c---c*hh1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o) 现行水平数据-WGS-842) Checksum 校验位4.2.13 RMT格式解析1 2 3 4 5 6 7 8 9 10| | | | | | | | | |$PGRMT,c...c,c,c,c,c,c,c,x.x,c*hh1) Product, model and software version 产品、模型、软件版本2) Rom checksum test ROM校验检测P=通过F=失败3) Receiver failure discrete 接收器失败P=通过F=失败4) Stored data lost 存储数据丢失R=保持L=丢失5) Real time clock lost 真实时间丢失R=保持L=丢失6) oscillator drift discrete 振荡频率漂移P=通过F=检测出额外的漂移7) Data collection discrete 数据搜集C=正在搜集中如果没有搜集则为NULL8) Board temperature in degrees C 面板温度摄氏度9) Board configuration data 面板配置数据R=保持L=丢失10) Checksum 校验位4.2.14 RMV格式解析1 2 3 4| | | |$PGRMV,x.x,x.x,x.x*hh1) True east velocity, -999.9 to 9999.9 meters/second 真实的向东速率2) True north velocity, -999.9 to 9999.9 meters/second 真实的向北速率3) Up velocity, -999.9 to 9999.9 meters/second 向上速率4) Checksum 校验位4.2.15 RMZ格式解析1 2 3 4| | | |$PGRMZ,x.x,f,h*hh1) Altitude 海拔高度2) Unit, feets 单位英尺3) Position fix dimensions 位置安装尺寸2 user altitude 用户高度3 GPS altitude GPS高度4) Checksum 校验位5.1 信息源5.2 罗经相关语句罗经分为磁罗经和电罗经两种,航海船舶一般都会安装两种罗经。
NMEA0813标准数据格式的解释和模拟
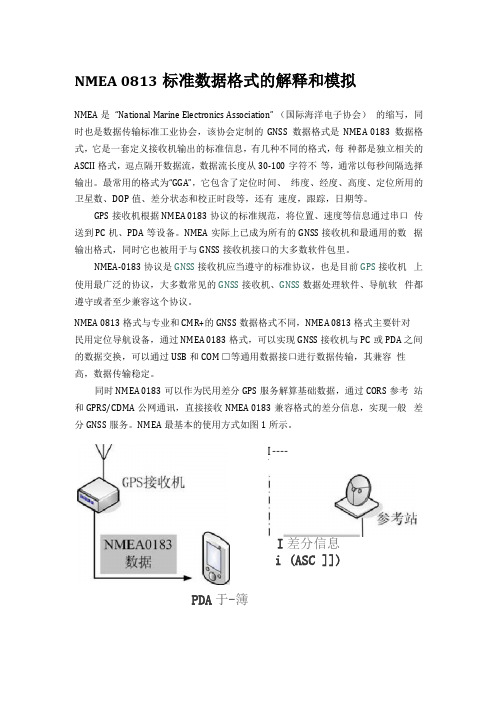
NMEA 0813标准数据格式的解释和模拟NMEA 是“National Marine Electronics Association” (国际海洋电子协会)的缩写,同时也是数据传输标准工业协会,该协会定制的GNSS数据格式是NMEA 0183数据格式,它是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的ASCII格式,逗点隔开数据流,数据流长度从30-100字符不等,通常以每秒间隔选择输出。
最常用的格式为“GGA”,它包含了定位时间、纬度、经度、高度、定位所用的卫星数、DOP值、差分状态和校正时段等,还有速度,跟踪,日期等。
GPS接收机根据NMEA 0183协议的标准规范,将位置、速度等信息通过串口传送到PC机、PDA等设备。
NMEA实际上已成为所有的GNSS接收机和最通用的数据输出格式,同时它也被用于与GNSS接收机接口的大多数软件包里。
NMEA-0183协议是GNSS接收机应当遵守的标准协议,也是目前GPS接收机上使用最广泛的协议,大多数常见的GNSS接收机、GNSS数据处理软件、导航软件都遵守或者至少兼容这个协议。
NMEA 0813格式与专业和CMR+的GNSS数据格式不同,NMEA 0813格式主要针对民用定位导航设备,通过NMEA 0183格式,可以实现GNSS接收机与PC或PDA 之间的数据交换,可以通过USB和COM □等通用数据接口进行数据传输,其兼容性高,数据传输稳定。
同时NMEA 0183可以作为民用差分GPS服务解算基础数据,通过CORS参考站和GPRS/CDMA公网通讯,直接接收NMEA 0183兼容格式的差分信息,实现一般差分GNSS服务。
NMEA最基本的使用方式如图1所示。
PDA于-簿I ----■I差分信息i (ASC ]])不同的GPSOEM接收板提供的NMEA语句有很大差异,主要表现在字段的意义和位置上。
用户需要先弄清楚需要哪些信息,然后对照GPS OEM接收板的技术资料,寻找那些包括所需信息的NMEA语句。
NEMA0183协议分析

NEMA0183协议分析NMEA0813协议解析1 信息源标识(Talker Identifiers)2 语句标识符与格式(Sentence Identifiers and Formats)在此,只列出语句标识符及中⽂解释,具体格式内容详见各设备相关语句。
3 属性语句(Some Proprietary Sentences)4.1 信息源4.2 GPS相关语句NMEA 0183 输出语句包括GGA、GSA、GSV、RMC 、VTG、GLL。
可通过GPS串⼝调试软件发送相应的命令语句给GPS OEM 板,此后GPS OEM板会跟据设置参数决定每隔若⼲毫秒发送哪种或哪⼏种NMEA 语句。
4.2.1 GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,0000*7D111 2 3 4 5 6 7 8 9 10| 12 13 14 15| | | | | | | | | | | | | | |$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh1) UTC时间2) 纬度3) N=北纬S=南纬4) 经度5) E=东经W=西经6) GPS性能指⽰0=未定位1=误差分定位信息2=带差分定位信息7) 使⽤卫星号00-128) 精度百分⽐9) ⼤地⽔准⾯⾼度10) 天线⾼度单位⽶12) ⾼度单位⽶13) 带差分GPS定位数据时间,未使⽤DGPS时此字段为空14) 差分站ID号0000-102315) 校验位4.2.2 GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9*091 2 3 14 15 16 17 18| | | | | | | |$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh1) 选择模式M=⼿动A=⾃动2) 当前状态1=⽆定位信息2=2D 3=3D3) 使⽤卫星号14) 使⽤卫星号2...14) 使⽤卫星号1215) 位置精度⽶16) ⽔平精度⽶17) 垂直精度⽶18) 校验位4.2.3 GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,*791 2 3 4 5 6 7 n| | | | | | | |$--GSV,x,x,x,x,x,x,x,...*hh1) GSV语句的总数⽬2) 当前GSV语句总数3) 显⽰卫星的总数⽬4) 卫星的PRV号星号5) 卫星仰⾓6) 卫星旋⾓/⽅位7) 信噪⽐... 更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰⾓<6>旋⾓<7>信噪⽐n) 校验位4.2.4 RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,*0C $GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A*7D121 2 3 4 5 6 7 8 9 10 11 || | | | | | | | | | | | $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh1) UTC时间2) 状态位V=导航报警接收器3) 纬度4) N=北纬S=南纬6) E=东经W=西经7) 对地速度哩/⼩时8) 航迹度数真实9) ⽇期⽇⽉年10) 磁变度数11) E=东经W=西经12) 校验位4.2.5 VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K*601 2 3 4 5 6 7 8 9| | | | | | | | |$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh1) 轨迹度数2) T=真实3) 轨迹度数4) M=磁罗经5) 速度哩/⼩时6) N=哩/⼩时7) 速度千⽶每⼩时8) K=千⽶每⼩时9) 校验位4.2.6 GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V*3A 1 2 3 4 5 6 7| | | | | | | $--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh1) 纬度2) N=北纬S=南纬3) 经度4) E=东经W=西经5) UTC时间6) 状态位A-数据有效V-数据⽆效7) 校验位4.2.7 ZDA格式解析例:$GPZDA,062321,03,02,2022,,*4F1 2 3 4 5 6 7| | | | | | |$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh1) 当地时区分钟描述,类似于当地时间2) 当地时区描述0- +/-13⼩时3) 年4) ⽉1-125) ⽇1-316) UTC时间4.2.8 RMO格式解析1 2 3| | |$PGRMO,ccccc,c*hh1) ⽬标语句描述2) ⽬标语句模式0=指定语句不可⽤1=指定语句可⽤2=所有不可⽤3=所有输出语句可⽤3) 校验位4.2.9 RME格式解析1 2 3 4 5 6 7| | | | | | |$PGRME,x.x,M,x.x,M,x.x,M*hh1) Estimated horizontal position error (HPE) ⽔平估计位置错误2) Unit, metres 单位⽶3) Estimated vertical error (VPE) 垂直估计错误4) Unit, metres 单位⽶5) Overall spherical equivalent position error 全球等效位置错误6) Unit, metres 单位⽶7) Checksum 校验位4.2.10 RMF格式解析10 12 151 2 3 4 5 6 7 8 9 | 11| 13 14 |16| | | | | | | | | | | | | | | | $PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,c*hh1) GPS week number (0 - 1023) 定位周期号0-10232) GPS seconds (0 - 604799) GPS秒0-6047993) UTC date of position fix 安装位置的UTC⽇期4) UTC time of position fix 安装位置的UTC时间5) GPS leap second count GPS闰秒数6) Latitude 纬度7) N or S 北纬或南纬8) Longitude 经度9) E or W 东经或西经10) Mode 模式M=⼿动A=⾃动11) Fix type 安装类型0=未固定1=2D固定2=3D位置12) Speed over ground, 0 to 999 kilometers/hour 对地速度0-999千⽶每⼩时13) Course over ground, 0 to 359 degrees, true 对地⽅位0-359度真实14) Position dilution of precision, 0 to 9 (rounded to nearest integer value) 位置精确百分⽐0-915) Time dilution of precision, 0 to 9 (rounded to nearest integer value) 时间精确百分⽐0-916) Checksum 校验位4.2.11 RMI格式解析1 2 3 4 5 6 7| | | | | | |$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmss*hh1) Latitude 纬度3) Longitude 经度4) E or W 东经或西经5) Current UTC date 当前UTC⽇期6) Current UTC time 当前UTC时间7) Checksum 校验位4.2.12 RMM格式解析1 2| |$PGRMM,c---c*hh1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o) 现⾏⽔平数据-WGS-842) Checksum 校验位4.2.13 RMT格式解析1 2 3 4 5 6 7 8 9 10| | | | | | | | | |$PGRMT,c...c,c,c,c,c,c,c,x.x,c*hh1) Product, model and software version 产品、模型、软件版本2) Rom checksum test ROM校验检测P=通过F=失败3) Receiver failure discrete 接收器失败P=通过F=失败4) Stored data lost 存储数据丢失R=保持L=丢失5) Real time clock lost 真实时间丢失R=保持L=丢失6) oscillator drift discrete 振荡频率漂移P=通过F=检测出额外的漂移7) Data collection discrete 数据搜集C=正在搜集中如果没有搜集则为NULL8) Board temperature in degrees C ⾯板温度摄⽒度9) Board configuration data ⾯板配置数据R=保持L=丢失10) Checksum 校验位4.2.14 RMV格式解析1 2 3 4| | | |$PGRMV,x.x,x.x,x.x*hh1) True east velocity, -999.9 to 9999.9 meters/second 真实的向东速率2) True north velocity, -999.9 to 9999.9 meters/second 真实的向北速率3) Up velocity, -999.9 to 9999.9 meters/second 向上速率4) Checksum 校验位4.2.15 RMZ格式解析1 2 3 4| | | |$PGRMZ,x.x,f,h*hh1) Altitude 海拔⾼度2) Unit, feets 单位英尺3) Position fix dimensions 位置安装尺⼨2 user altitude ⽤户⾼度3 GPS altitude GPS⾼度4) Checksum 校验位5.1 信息源5.2 罗经相关语句罗经分为磁罗经和电罗经两种,航海船舶⼀般都会安装两种罗经。
GNSS输出NEMA协议解析
GNSS导航芯片输出NEMA协议解析1.NEMA协议的由来NMEA协议是为了在不同的GPS(全球定位系统)导航设备中建立统一的BTCM(海事无线电技术委员会)标准,由美国国家海洋电子协会(NMEA-The National Marine Electronics Associa-tion)制定的一套通讯协议。
GPS接收机根据NMEA-0183协议的标准规范,将位置、速度等信息通过串口传送到PC机、PDA等设备。
NMEA-0183协议是GPS接收机应当遵守的标准协议,也是目前GPS接收机上使用最广泛的协议,大多数常见的GPS接收机、GPS数据处理软件、导航软件都遵守或者至少兼容这个协议。
NMEA-0183协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL等。
下面给出这些常用NMEA-0183语句的字段定义解释。
$GPGGA例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F字段0:$GPGGA,语句ID,表明该语句为Global Positioning System Fix Data(GGA)GPS定位信息字段1:UTC 时间,hhmmss.sss,时分秒格式字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段3:纬度N(北纬)或S(南纬)字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段5:经度E(东经)或W(西经)字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算字段7:正在使用的卫星数量(00 - 12)(前导位数不足则补0)字段8:HDOP水平精度因子(0.5 - 99.9)字段9:海拔高度(-9999.9 - 99999.9)字段10:地球椭球面相对大地水准面的高度字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)字段12:差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空)字段13:校验值$GPGSA例:$GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A字段0:$GPGSA,语句ID,表明该语句为GPS DOP and Active Satellites(GSA)当前卫星信息字段1:定位模式,A=自动手动2D/3D,M=手动2D/3D字段2:定位类型,1=未定位,2=2D定位,3=3D定位字段3:PRN码(伪随机噪声码),第1信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段4:PRN码(伪随机噪声码),第2信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段5:PRN码(伪随机噪声码),第3信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段6:PRN码(伪随机噪声码),第4信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段7:PRN码(伪随机噪声码),第5信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段8:PRN码(伪随机噪声码),第6信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段9:PRN码(伪随机噪声码),第7信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段10:PRN码(伪随机噪声码),第8信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段11:PRN码(伪随机噪声码),第9信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段12:PRN码(伪随机噪声码),第10信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段13:PRN码(伪随机噪声码),第11信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段14:PRN码(伪随机噪声码),第12信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段15:PDOP综合位置精度因子(0.5 - 99.9)字段16:HDOP水平精度因子(0.5 - 99.9)字段17:VDOP垂直精度因子(0.5 - 99.9)字段18:校验值$GPGSV例:$GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70字段0:$GPGSV,语句ID,表明该语句为GPS Satellites in View(GSV)可见卫星信息字段1:本次GSV语句的总数目(1 - 3)字段2:本条GSV语句是本次GSV语句的第几条(1 - 3)字段3:当前可见卫星总数(00 - 12)(前导位数不足则补0)字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段5:卫星仰角(00 - 90)度(前导位数不足则补0)字段6:卫星方位角(00 - 359)度(前导位数不足则补0)字段7:信噪比(00-99)dbHz字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段9:卫星仰角(00 - 90)度(前导位数不足则补0)字段10:卫星方位角(00 - 359)度(前导位数不足则补0)字段11:信噪比(00-99)dbHz字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段13:卫星仰角(00 - 90)度(前导位数不足则补0)字段14:卫星方位角(00 - 359)度(前导位数不足则补0)字段15:信噪比(00-99)dbHz字段16:校验值NMEA0183标准语句另一种表达方式详解1、Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF><1> UTC时间,hhmmss(时分秒)格式<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3> 纬度半球N(北半球)或S(南半球)<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5> 经度半球E(东经)或W(西经)<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算<7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)<9> 海拔高度(-9999.9~99999.9)<10> 地球椭球面相对大地水准面的高度<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)2、GPS DOP and Active Satellites(GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh <CR><LF><1> 模式,M=手动,A=自动<2> 定位类型,1=没有定位,2=2D定位,3=3D定位<3> PRN码(伪随机噪声码),正在用于解算位置的卫星号(01~32,前面的0也将被传输)。
NEMA0183 协议分析
NMEA0813协议解析1 信息源标识(Talker Identifiers)2 语句标识符与格式(Sentence Identifiers and Formats)在此,只列出语句标识符及中文解释,具体格式内容详见各设备相关语句。
3 属性语句(Some Proprietary Sentences)4 NMEA0813 GPS相关4.1 信息源4.2 GPS相关语句NMEA 0183 输出语句包括GGA、GSA、GSV、RMC 、VTG、GLL。
可通过GPS串口调试软件发送相应的命令语句给GPS OEM 板,此后GPS OEM板会跟据设置参数决定每隔若干毫秒发送哪种或哪几种NMEA 语句。
4.2.1 GGA格式解析例:$GPGGA,062320,3537.8333,N,13944.6667,E,0,00,99.9,0100,M,,M,000,0000*7D111 2 3 4 5 6 7 8 9 10| 12 13 14 15| | | | | | | | | | | | | | |$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh1) UTC时间2) 纬度3) N=北纬S=南纬4) 经度5) E=东经W=西经6) GPS性能指示0=未定位1=误差分定位信息2=带差分定位信息7) 使用卫星号00-128) 精度百分比9) 大地水准面高度10) 天线高度单位米12) 高度单位米13) 带差分GPS定位数据时间,未使用DGPS时此字段为空14) 差分站ID号0000-102315) 校验位4.2.2 GSA格式解析例:$GPGSA,A,1,,,,,,,,,,,,,99.9,99.9,99.9*091 2 3 14 15 16 17 18| | | | | | | |$--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh1) 选择模式M=手动A=自动2) 当前状态1=无定位信息2=2D 3=3D3) 使用卫星号14) 使用卫星号2...14) 使用卫星号1215) 位置精度米16) 水平精度米17) 垂直精度米18) 校验位4.2.3 GSV格式解析例:$GPGSV,1,1,00,,,,,,,,,,,,,,,,*791 2 3 4 5 6 7 n| | | | | | | |$--GSV,x,x,x,x,x,x,x,...*hh1) GSV语句的总数目2) 当前GSV语句总数3) 显示卫星的总数目4) 卫星的PRV号星号5) 卫星仰角6) 卫星旋角/方位7) 信噪比... 更多颗卫星数据省略,其中每颗卫星数据包括<4>星号<5>仰角<6>旋角<7>信噪比n) 校验位4.2.4 RMC格式解析例:$GPRMC,062321,V,3537.8333,N,13944.6667,E,000.0,000.0,030222,,*0C $GPRMC,154916,A,3140.0488,N,12112.8300,E,000.0,000.0,080416,,,A*7D121 2 3 4 5 6 7 8 9 10 11 || | | | | | | | | | | | $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh1) UTC时间2) 状态位V=导航报警接收器3) 纬度4) N=北纬S=南纬6) E=东经W=西经7) 对地速度哩/小时8) 航迹度数真实9) 日期日月年10) 磁变度数11) E=东经W=西经12) 校验位4.2.5 VTG格式解析例:$GPVTG,000.0,T,,M,000.0,N,000.0,K*601 2 3 4 5 6 7 8 9| | | | | | | | |$--VTG,x.x,T,x.x,M,x.x,N,x.x,K*hh1) 轨迹度数2) T=真实3) 轨迹度数4) M=磁罗经5) 速度哩/小时6) N=哩/小时7) 速度千米每小时8) K=千米每小时9) 校验位4.2.6 GLL格式解析例:$GPGLL,3537.8333,N,13944.6667,E,062321,V*3A1 2 3 4 5 6 7| | | | | | | $--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A*hh1) 纬度2) N=北纬S=南纬3) 经度4) E=东经W=西经5) UTC时间6) 状态位A-数据有效V-数据无效7) 校验位4.2.7 ZDA格式解析例:$GPZDA,062321,03,02,2022,,*4F1 2 3 4 5 6 7| | | | | | |$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh1) 当地时区分钟描述,类似于当地时间2) 当地时区描述0- +/-13小时3) 年4) 月1-125) 日1-316) UTC时间4.2.8 RMO格式解析1 2 3| | |$PGRMO,ccccc,c*hh1) 目标语句描述2) 目标语句模式0=指定语句不可用1=指定语句可用2=所有不可用3=所有输出语句可用3) 校验位4.2.9 RME格式解析1 2 3 4 5 6 7| | | | | | |$PGRME,x.x,M,x.x,M,x.x,M*hh1) Estimated horizontal position error (HPE) 水平估计位置错误2) Unit, metres 单位米3) Estimated vertical error (VPE) 垂直估计错误4) Unit, metres 单位米5) Overall spherical equivalent position error 全球等效位置错误6) Unit, metres 单位米7) Checksum 校验位4.2.10 RMF格式解析10 12 151 2 3 4 5 6 7 8 9 | 11| 13 14 |16| | | | | | | | | | | | | | | | $PGRMF,x.x,x.x,ddmmyy,hhmmss,x.x,ddmm.mmmm,c,dddmm.mmmm,c,c,c,x.x,x.x,c,c*hh1) GPS week number (0 - 1023) 定位周期号0-10232) GPS seconds (0 - 604799) GPS秒0-6047993) UTC date of position fix 安装位置的UTC日期4) UTC time of position fix 安装位置的UTC时间5) GPS leap second count GPS闰秒数6) Latitude 纬度7) N or S 北纬或南纬8) Longitude 经度9) E or W 东经或西经10) Mode 模式M=手动A=自动11) Fix type 安装类型0=未固定1=2D固定2=3D位置12) Speed over ground, 0 to 999 kilometers/hour 对地速度0-999千米每小时13) Course over ground, 0 to 359 degrees, true 对地方位0-359度真实14) Position dilution of precision, 0 to 9 (rounded to nearest integer value) 位置精确百分比0-915) Time dilution of precision, 0 to 9 (rounded to nearest integer value) 时间精确百分比0-916) Checksum 校验位4.2.11 RMI格式解析1 2 3 4 5 6 7| | | | | | |$PGRMI,ddmm.mmm,N,ddmm.mmm,E,ddmmyy,hhmmss*hh1) Latitude 纬度3) Longitude 经度4) E or W 东经或西经5) Current UTC date 当前UTC日期6) Current UTC time 当前UTC时间7) Checksum 校验位4.2.12 RMM格式解析1 2| |$PGRMM,c---c*hh1) Currently active horizontal datum (WGS-84, NAD27 Canada, ED50, a.s.o) 现行水平数据-WGS-842) Checksum 校验位4.2.13 RMT格式解析1 2 3 4 5 6 7 8 9 10| | | | | | | | | |$PGRMT,c...c,c,c,c,c,c,c,x.x,c*hh1) Product, model and software version 产品、模型、软件版本2) Rom checksum test ROM校验检测P=通过F=失败3) Receiver failure discrete 接收器失败P=通过F=失败4) Stored data lost 存储数据丢失R=保持L=丢失5) Real time clock lost 真实时间丢失R=保持L=丢失6) oscillator drift discrete 振荡频率漂移P=通过F=检测出额外的漂移7) Data collection discrete 数据搜集C=正在搜集中如果没有搜集则为NULL8) Board temperature in degrees C 面板温度摄氏度9) Board configuration data 面板配置数据R=保持L=丢失10) Checksum 校验位4.2.14 RMV格式解析1 2 3 4| | | |$PGRMV,x.x,x.x,x.x*hh1) True east velocity, -999.9 to 9999.9 meters/second 真实的向东速率2) True north velocity, -999.9 to 9999.9 meters/second 真实的向北速率3) Up velocity, -999.9 to 9999.9 meters/second 向上速率4) Checksum 校验位4.2.15 RMZ格式解析1 2 3 4| | | |$PGRMZ,x.x,f,h*hh1) Altitude 海拔高度2) Unit, feets 单位英尺3) Position fix dimensions 位置安装尺寸2 user altitude 用户高度3 GPS altitude GPS高度4) Checksum 校验位5.1 信息源5.2 罗经相关语句罗经分为磁罗经和电罗经两种,航海船舶一般都会安装两种罗经。
nema协议解析

nema协议解析协议名称:NEMA协议解析一、引言NEMA(National Electrical Manufacturers Association,全国电气制造商协会)是美国领先的电气制造商协会,致力于制定和推广电气设备和系统的标准。
NEMA 协议是NEMA制定的一系列标准,旨在规范电气设备和系统的设计、制造、安装和使用。
本协议旨在解析NEMA协议的相关内容,以便更好地理解和应用该协议。
二、协议解析1. NEMA协议简介NEMA协议是由NEMA制定的一系列标准,涵盖了多个领域,包括电气设备、电缆、电机、电源、照明等。
这些标准旨在提高电气设备和系统的安全性、可靠性和互操作性,促进产品的质量和性能。
NEMA协议被广泛应用于美国的电气工程领域,并在全球范围内具有重要影响力。
2. NEMA协议的主要内容(1)电气设备标准:NEMA协议包括了一系列电气设备的标准,如开关、插座、电缆和接线端子等。
这些标准规定了电气设备的设计、制造和测试要求,以确保其安全性和性能满足相关要求。
(2)电机标准:NEMA协议还制定了电机的标准,包括电机的尺寸、功率、效率、起动方式等。
这些标准旨在提高电机的效率和可靠性,促进能源的节约和环境的保护。
(3)电源标准:NEMA协议涵盖了电源的标准,包括交流电源、直流电源和电池等。
这些标准规定了电源的输入、输出、效率、安全等要求,以确保电源的质量和可靠性。
(4)照明标准:NEMA协议还包括了照明的标准,如灯具、照明控制系统等。
这些标准规定了照明产品的设计、安装和使用要求,以提高照明效果和节能效果。
3. NEMA协议的应用领域NEMA协议广泛应用于各个领域,包括建筑、工业、交通、医疗、能源等。
在建筑领域,NEMA协议的标准被用于规范电气设备和系统的设计和安装;在工业领域,NEMA协议的标准被用于提高电气设备和系统的可靠性和安全性;在交通领域,NEMA协议的标准被用于规范交通信号灯和交通控制设备;在医疗领域,NEMA协议的标准被用于规范医疗设备的设计和使用;在能源领域,NEMA协议的标准被用于提高电源的效率和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GNSS 导航芯片输出 NEMA 协议解析1. NEMA 协议的由来NMEA 协议是为了在不同的 GPS (全球定位系统)导航设备中建立统一的 BTCM (海事无线电技术委员会)标准,由美国国家海洋电子协会( NMEA-The National Marine ElectronicsAssocia-tion )制定的一套通讯协议。
GPS接收机根据NMEA-0183 协议的标准规范,将位置、速度等信息通过串口传送到 PC 机、PDA 等设备。
NMEA-0183 协议是 GPS 接收机应当遵守的标准协议,也是目前 GPS 接收机上使用最广泛的协议,大多数常见的GPS接收机、GPS数据处理软件、导航软件都遵守或者至少兼容这个协议。
NMEA-0183 协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有$GPGGA$GPGSA 、 $GPGSV 、 $GPRMC 、 $GPVTG 、 $GPGLL 等。
下面给出这些常用 NMEA-0183 语句的字段定义解释。
$GPGGA例: $GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F字段 0: $GPGGA ,语句 ID,表明该语句为 Global Positioning System Fix Data (GGA )GPS 定位信息字段 1 : UTC 时间, hhmmss.sss ,时分秒格式字段 2:纬度 ddmm.mmmm ,度分格式(前导位数不足则补 0)字段3:纬度N (北纬)或S (南纬)字段 4 :经度 dddmm.mmmm ,度分格式(前导位数不足则补 0 )字段 5: 经度 E(东经)或 W(西经)字段 6: GPS 状态, 0=未定位, 1=非差分定位, 2=差分定位, 3=无效 PPS , 6=正在估算字段 7: 正在使用的卫星数量( 00 - 12 )(前导位数不足则补 0)字段 8 : HDOP 水平精度因子( 0.5 - 99.9 )字段 9: 海拔高度( -9999.9 - 99999.9 )字段 10: 地球椭球面相对大地水准面的高度字段 11 : 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)字段 12: 差分站 ID 号 0000 - 1023 (前导位数不足则补 0,如果不是差分定位将为空)字段 13: 校验值GSA ) 当 前 字 段 3 : PRN 码数不 足则补 0)伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位 字 段 4 : PRN 码 数不 足则补 0)伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位 字 段 5 : PRN 码 数不 足则补 0)伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位 字 段 6 : PRN 码 数不 足则补 0)伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位 字 段 7 : PRN 码 数不 足则补 0)伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位 字 段 8 : PRN 码 数不 足则补 0)伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位 字 段 9 : PRN 码 数不 足则补 0) 伪随机噪声码), 信道正在使用的卫星 PRN 码编号 00 前导位字 段 10 : PRN 位数不足则补码(伪随机噪声码)0) ,第 8 信道正在使用 的卫星 PRN 码编号 00 ) 前导 字 段 11 : PRN 位数不足则补 码(伪随机噪声码)0),第 9 信道正在使用 的卫星 PRN 码编号 00 ) 前导 字段 12: PRN 位数不足则补 码( 0)伪随机噪声码),第 10 信道正在使用的卫星 PRN 码 编 号( 00 ) 前导 字段 13: PRN 位数不足则补 码( 0)伪随机噪声码),第 11 信道正在使用的卫星 PRN 码 编 号( 00 ) 前导 字 段 14 : PRN 位数不足则补 码( 0) 伪随机噪声码),第 12 信道正在使用的卫星 PRN 码 编 号( 00 ) 前导 字段 15: PDOP 综合位置精度 因子(0.5 - 99.9) 字段 16: HDOP水平精度因子 ( 0.5 - 99.9 ) 字段 17: VDOP垂直精度因子 ( 0.5 - 99.9 )$GPGSA例: $GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A字段 0: $GPGSA , 语 句 ID , 表 明 该 语句 为 GPS DOP and Active Satellites 卫星信息 字段1 :定位模式,A=自动手动2D/3D , M=手动2D/3D字段 2: 定位类型, 1=未定位, 2=2D 定位, 3=3D 定位$GPGSV例: $GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70字段0: $GPGSV ,语句ID ,表明该语句为GPS Satellites in View ( GSV )可见卫星信息字段 1:本次 GSV 语句的总数目( 1 - 3 )字段 2: 本条 GSV 语句是本次 GSV 语句的第几条(1 - 3 )字段 3: 当前可见卫星总数(00 - 12 )(前导位数不足则补 0)字段 4: PRN 码(伪随机噪声码)( 01 - 32 )(前导位数不足则补 0)字段 5: 卫星仰角( 00 - 90 )度(前导位数不足则补 0)字段 6: 卫星方位角( 00 - 359 )度(前导位数不足则补 0)字段 7: 信噪比( 00 -99 ) dbHz字段 8: PRN 码(伪随机噪声码)( 01 - 32 )(前导位数不足则补 0)字段 9: 卫星仰角( 00 - 90 )度(前导位数不足则补 0)字段 10: 卫星方位角( 00 - 359 )度(前导位数不足则补 0)字段 11 : 信噪比( 00 - 99 ) dbHz字段 12: PRN 码(伪随机噪声码)( 01 - 32 )(前导位数不足则补 0)字段 13: 卫星仰角( 00 - 90 )度(前导位数不足则补 0)字段 14: 卫星方位角( 00 - 359 )度(前导位数不足则补 0)字段 15 : 信噪比( 00 - 99 ) dbHz字段 16 : 校验值NMEA0183 标准语句另一种表达方式详解1 、 Global Positioning System Fix Data ( GGA ) GPS 定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12 >*hh<CR><LF><1>UTC 时间, hhmmss (时分秒)格式<2>纬度 ddmm.mmmm (度分)格式(前面的 0 也将被传输)<3>纬度半球N (北半球)或S (南半球)<4>经度 dddmm.mmmm (度分)格式(前面的 0 也将被传输)<5>经度半球 E(东经)或 W(西经)<6>GPS 状态: 0=未定位, 1=非差分定位,2=差分定位,6=正在估算<7>正在使用解算位置的卫星数量(00~12 )(前面的 0 也将被传输) <8>HDOP 水平精度因子( 0.5~99.9)<9>海拔高度( -9999.9~99999.9 )<10>地球椭球面相对大地水准面的高度<11>差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12>差分站ID 号0000~1023 (前面的 0 也将被传输,如果不是差分定位将为空)2、 GPS DOP and Active Satellites ( GSA )当前卫星信息$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh<CR><LF><1>模式,M=手动,A=自动<2>定位类型, 1=没有定位, 2=2D 定位, 3=3D 定位<3>PRN 码(伪随机噪声码),正在用于解算位置的卫星号( 01~32 ,前面的 0 也将被传输)。
<4>PDOP 位置精度因子( 0.5~99.9 )<5>HDOP 水平精度因子( 0.5~99.9 )<6>VDOP 垂直精度因子( 0.5~99.9 )3 、 GPS Satellites in View ( GSV ) 可见卫星信息$GPGSV,<1>,v2>,v3>,v4>,v5>,v6>,<7>, v4>,v5>,v6>,v7>*hh vCR>vLF>v1> GSV 语句的总数v2>本句GSV 的编号<3>可见卫星的总数(00~12 ,前面的 0 也将被传输)<4>PRN 码(伪随机噪声码)(01~32 ,前面的 0 也将被传输)<5>卫星仰角( 00~90 度,前面的 0 也将被传输)<6>卫星方位角(000~359 度,前面的 0 也将被传输)<7>信噪比( 00~99dB ,没有跟踪到卫星时为空,前面的 0也将被传输)注: <4>,<5>,<6>,<7>信息将按照每颗卫星进行循环显示,每条 GSV 语句最多可以显示 4 颗卫星的信息。
其他卫星信息将在下一序列的 NMEA0183 语句中输出。
4、 Recommended Minimum Specific GPS/TRANSIT Data (RMC )推荐定位信息$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh<CR><LF><1>UTC 时间, hhmmss (时分秒)格式<2>定位状态,A=有效定位,V=无效定位<3>纬度 ddmm.mmmm (度分)格式(前面的 0 也将被传输)<4>纬度半球N (北半球)或S (南半球)<5>经度 dddmm.mmmm (度分)格式(前面的 0 也将被传输)<6>经度半球 E(东经)或 W(西经)<7>地面速率( 000.0~999.9 节,前面的 0 也将被传输)<8>地面航向( 000.0~359.9 度,以真北为参考基准,前面的 0 也将被传输)<9>UTC 日期, ddmmyy (日月年)格式<10>磁偏角( 000.0~180.0 度,前面的 0 也将被传输)<11>磁偏角方向, E(东)或 W(西)<12>模式指示(仅NMEA0183 3.00 版本输出,A=自主定位,D=差分,E=估算,N=数据无效)5、 Track Made Good and Ground Speed ( VTG )地面速度信息$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh<CR><LF><1>以真北为参考基准的地面航向( 000~359 度,前面的 0 也将被传输)<2>以磁北为参考基准的地面航向( 000~359 度,前面的 0 也将被传输)<3>地面速率( 000.0~999.9 节,前面的 0 也将被传输)<4>地面速率( 0000.0~1851.8 公里/小时,前面的 0 也将被传输)<5>模式指示(仅NMEA0183 3.00 版本输出,A=自主定位,D=差分,E=估算,N=数据无效)6 、 Geographic Position ( GLL )定位地理信息 $GPGLL,<1>,<2>,<3>,<4>,<5>,<6>,<7>*hh<CR><LF><1>纬度 ddmm.mmmm (度分)格式(前面的 0 也将被传输)<2>纬度半球 N (北半球)或 S (南半球)<3>经度 dddmm.mmmm (度分)格式(前面的 0 也将被传输)<4>经度半球 E(东经)或 W(西经)<5>UTC 时间, hhmmss (时分秒)格式<6>定位状态, A= 有效定位, V= 无效定位<7>模式指示(仅NMEA0183 3.00 版本输出,A=自主定位,D=差分,E=估算,N=数据无效)二、 GARMIN 定义的语句7 、 Estimated Error Information ( PGRME )估计误差信息$PGRME,<1>,M,<2>,M,<3>,M*hh<CR><LF><1>HPE (水平估计误差), 0.0~999.9 米<2>VPE (垂直估计误差), 0.0~999.9 米<3>EPE (位置估计误差), 0.0~999.9 米8 、 GPS Fix Data Sentence ( PGRMF ) GPS 定位信息$PGRMF,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>,<15>*hh<CR><LF><1>GPS 周数 ( 0~1023 )<2>GPS 秒数 ( 0~604799 )<3>UTC 日期, ddmmyy (日月年)格式<4>UTC 时间, hhmmss (时分秒)格式<5>GPS 跳秒数<6>纬度 ddmm.mmmm (度分)格式(前面的 0 也将被传输)<7>纬度半球 N (北半球)或 S (南半球)。