第10章 计数器
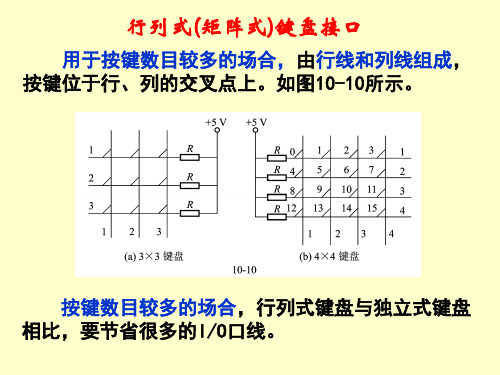
第10章行列式(矩阵式)键盘接口
AJMP
LKP
LTW0:JB MOV AJMP LTHR:JB MOV LKP: ADD PUSH LK3: ACALL
A.2,LTHR A,#10H LKP Acc.3,NEXT A,#18H A,R4 A DIR
;2行线为高,无键闭合,跳LTHR, ;转判3行 ;2行有键闭合,首键号10H→A ;跳LKP,计算键号 ;3行线为高,无键 ;闭合,跳NEXT,准备下一列扫描 ;3行有键闭合,首键号18H→A ;计算键号:首键号+列号=键号 ;键号进栈保护 ;调用显示子程序,延时6ms ;调用判有无键闭合子程序,延时 ;6ms ;判键释放否,未释放,则循环 ;键已释放,键号出栈→A
ACALL KS1 JNZ POP RET LK3 A
NEXT:INC
R4
;列计数器加1,为下一列扫描作准备
MOV JNB
RL MOV AJMP KND: AJMP KS1: MOV “0”→ MOV MOVX
A,R2 ;判是否已扫到最后一列(最右一列) Acc.7,KND ;键扫描已扫到最后一列,跳KND,
(2)按键的识别方法
a. 扫描法 图10-10(b)中3号键被按下为例,来说明此键 时如何被识别出来的。
识别键盘有无键被按下的方法,分两步进行: 第1步:识别键盘有无键按下; 第2步:如有键被按下,识别出具体的按键。 把所有列线置0,检查各行线电平是否有变化,如 有变化,说明有键按下,如无变化,则无键按下。 上述方法称为扫描法,即先把某一列置低电平, 其余各列为高电平,检查各行线电平的变化,如果某 行线电平为低,可确定此行列交叉点处的按键被按 下。 b. 线反转法
原则:即要保证能及时响应按键操作,又不要过多占 用CPU的工作时间。 通常,键盘工作方式有3种,即编程扫描、定时扫 描和中断扫描。 1. 编程扫描方式 只有当单片机空闲时,才调用键盘扫描子程序, 扫描键盘。 工作过程:
单片微型计算机原理及应用_课后习题答案_山东理工
《单片微型计算机原理及应用》习题参考答案姜志海刘连鑫王蕾编著电子工业出版社目录第1章微型计算机基础 (2)第2章半导体存储器及I/O接口基础 (4)第3章MCS-51系列单片机硬件结构 (11)第4章MCS-51系列单片机指令系统 (16)第5章MCS-51系列单片机汇编语言程序设计 (20)第6章MCS-51系列单片机中断系统与定时器/计数器 (26)第7章MCS-51系列单片机的串行口 (32)第8章MCS-51系列单片机系统扩展技术 (34)第9章MCS-51系列单片机键盘/显示器接口技术 (36)第10章MCS-51系列单片机模拟量接口技术 (40)第11章单片机应用系统设计 (44)第1章微型计算机基础1.简述微型计算机的结构及各部分的作用微型计算机在硬件上由运算器、控制器、存储器、输入设备及输出设备五大部分组成。
运算器是计算机处理信息的主要部分;控制器控制计算机各部件自动地、协调一致地工作;存储器是存放数据与程序的部件;输入设备用来输入数据与程序;输出设备将计算机的处理结果用数字、图形等形式表示出来。
通常把运算器、控制器、存储器这三部分称为计算机的主机,而输入、输出设备则称为计算机的外部设备(简称外设)。
由于运算器、控制器是计算机处理信息的关键部件,所以常将它们合称为中央处理单元CPU(Central Process Unit)。
2.微处理器、微型计算机、微型计算机系统有什么联系与区别?微处理器是利用微电子技术将计算机的核心部件(运算器和控制器)集中做在一块集成电路上的一个独立芯片。
它具有解释指令、执行指令和与外界交换数据的能力。
其内部包括三部分:运算器、控制器、内部寄存器阵列(工作寄存器组)。
微型计算机由CPU、存储器、输入/输出(I/O)接口电路构成,各部分芯片之间通过总线(Bus)连接。
以微型计算机为主体,配上外部输入/输出设备、电源、系统软件一起构成应用系统,称为微型计算机系统。
第10章作业与答案
习题一、选择题1.在异步串行通信中,收发双方必须保持________。
A.收发时钟相同B.停止位相同C.数据格式和波特率相同D.以上都正确答案:C2.同步通信过程中,通信双方依靠_____进行同步。
A.起始位B.同步字符C.命令字D.停止位答案:B3.8251A收、发串行数据的波特率_______。
A.可由编程设置B.等于CLK输入的基准时钟频率的16倍C.等于CLK输入的基准时钟频率的1/16D.等于CLK输入的基准时钟频率答案:A4.8251A以异步通信方式工作,设波特率因子为16,字符长度为8位,奇校验,停止位为2位,每秒种可传输200个字符,则它的传输速率和收发时钟信号频率分别是______(bps,kHz)。
A.200,200B.2200,38.4C.2400,38.4D.200,38.4答案:C5.DMA用于传送_____之间的大量数据。
A.CPU与存储器B.存储器与外设C.CPU与外设D.寄存器与存储器答案:B6.在微机系统中采用DMA方式传输数据时,数据传送是______。
A.由CPU控制完成的B.由执行程序(软件)完成C.由DMAC发出的控制信号控制完成的D.由总线控制器发出的控制信号控制完成的答案:C7.当8086/8088CPU响应DMA设备的HOLD请求后,CPU将______。
A.转入特殊的中断服务程序B.进入等待周期C.接受外部数据D.放弃对总线的控制权答案:D8.在DMA方式下,将内存数据送到外设的路径是_______。
A.CPU→DMAC→外设B.内存→数据总线→外设C.内存→CPU→总线→外设D.内存→DMAC→数据总线→外设答案:B9.在DMA方式下,CPU与总线的关系是______。
A.只能控制地址总线B.相互成隔离状态C.只能控制数据线D.相互成短接状态答案:B10.采用DMA方式传送时,每传送一个数据要占用______时间。
A.一个指令周期B.一个机器周期C.一个存储周期D.一个总线时钟周期答案:C二、填空题1.异步串行通信没有数据传送时,发送方应发送______信号;串行同步通信没有数据传送时,发送方应发送_____信号。
第10章AD及D
2.ADC 0809接口与应用
图10-2 是ADC0809与8031单片机的一种常用接口电路图。8路模拟量的变化范围在0~5V间,ADC0809的 EOC转换结束信号接803l的外部中断1上,803l通过地址线P2.0和读、写信号来控制转换器的模拟量输入通 道地址锁存、启动和输出允许。模拟输入通道地址A、B、C由P0.0~P0.2经锁存器提供。ADC0809时钟输 入由单片机ALE经2分频电路获得,若单片机时钟频率符合要求,也可不加2分频电路。
MOVX @DPTR,A ;启动A/D LP: JB P3.3,LP ;等待A/D转换结束
MOV DPTR,#0FF0lH ;A/D高8位数据口地址A0=0,R/ =l MOVX A,@DPTR ;读高8位数据 MOV @Rl,A ;存入片内RAM
INC R1 MOV DPTR,#0FF03H ;低4位数据口地址A0=1,R/ =1 MOVX A,@DPTR ;读低4位数据 MOV @R1,A ;存入片内RAM
ADC0809是28引脚DIP封装的芯片,各引脚功能如下: IN0~IN7(8条):8路模拟量输入,用于输入被转换的模拟电压。 D7~D0为数字量输出。 A、B、C:模拟输入通道地址选择线,其8位编码分别对应IN0~IN7,用于选择IN7~IN0上哪一路模拟电压 送给比较器进行A/D转换。
ALE:地址锁存允许,高电平有效。由低至高电平的正跳变将通道地址锁存至地址锁存器,经译码后控制八路 模拟开关工作。
②查询方式 A/D转换芯片有表明转换完成的状态信号,例如ADC0809的EOC端。因此,可以用查询方式,软件测试EOC的
第10章西门子S7-200PLC
四、工业通信网络
1.工业以太网 2.PROFIBUS现场总线 3.MPI多点接口通信 4.AS-i现场级通信 5.PPI通信 6.点对点自由通信
图10-1 SIMATIC S7通信网络
五、人机界面(HMI)硬件 六、SIMATIC S7工业软件 1.编程和工程工具 2.基于PC的控制软件 3.人机界面软件
某种意义上说,SIMATICS7 系列PLC代表了现代可编程序控 制器的方向。
第二节 S7-200 PLC的系统组成
S7-200系列可编程控制器作为西门子 SIMATIC PLC家族中的最小成员,以其 超小体积,灵活的配置,强大的内置功能, 在各个领域得到广泛的应用。S7-200可 提供四个不同配置的CPU:CPU221、 CPU222、CPU224、CPU226,外形见 图10-2,各CPU功能和技术参数见表101。
I0.3
M0.1
图中的最后3条指令结构的输出 形式,称为连续输出。
3) 触点并联指令O(Or),ON(Or Not) O:常开触点并联连接。 ON:常闭触点并联连接。 O,ON指令应用于并联单个触点,紧接 在LD、LDN之后使用,可以连续使用。 O,ON指令的操作数为:I、Q、M、SM、 T、C、V、S。
这就是用图形符号表示的指令,它包括 三个基本形式以及一些连线。 (1)触点 代表逻辑“输入”条件,例如开 关、按钮、内部条件等。能量流仅在常开触点 闭合时通过。 (2)线圈 ( )通常代表逻辑“输出”结果, 例如灯、接触器、中间寄存器、内部输出条件 等。当有能量流输入时才会有输出。 (3)盒(方框) 代表附加指令,例如定时器、 计数器或者数学运算指令等。当能量流 到 此框,就能执行一定的功能。
计算机组成原理10 第十章 CU的设计(2)

⑨ JMP X
T0
T1 T2 Ad ( IR ) PC
⑩ BAN X
T0
T1 T2 A0 • Ad ( IR ) + A0• PC PC
5. 中断周期 微操作的 节拍安排
T0
T1 T2
10.1
硬件关中断
0
PC MDR
MAR
MDR M ( MAR )
1
W
向量地址
PC
中断隐指令完成
三、组合逻辑设计步骤
T0
EX 执行
1
1 T1
M(MAR) AC
W
(AC)+(MDR) AC T2
MDR
MDR 0
M(MAR)
AC AC 1
1
2. 写出微操作命令的最简表达式
M ( MAR ) MDR
10.1
= FE · 1 + IND · 1 ( ADD + STA + LDA + JMP + BAN ) T T + EX · 1 ( ADD +LDA ) T = T1{ FE + IND ( ADD + STA + LDA + JMP + BAN ) + EX ( ADD +LDA ) }
10.1
微操作命令信号 CLA COM ADD SAT LDA JMP PC 1 M(MAR) ( PC ) +1 MDR OP( IR ) MAR R MDR PC IR ID IND EX 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
FE 取指
T0 T1 T2 PC 1 R MDR PC IR ID
函数信号发生器(F05A)

目 录第一章概述 1 第二章主要特征 1 第三章技术指标 2一、函数信号发生器 2二、计数器 5三、其它 6 第四章面板说明7一、显示说明7二、前面板说明8三、后面板说明13 第五章使用说明14一、测试前的准备工作14二、函数信号输出使用说明 14三、计数器使用说明 32 第六章遥控操作使用说明34 第七章B路信号说明 52 第八章功率放大模块说明 57第九章注意事项与检修58 第十章附录USB接口驱动安装59 第十一章仪器整套设备及附件63南京盛普仪器科技有限公司 1本仪器是一台精密的测试仪器,具有输出函数信号、调频、调幅、FSK 、PSK 、猝发、频率扫描等信号的功能。
此外,本仪器还具有测频和计数的功能。
本仪器是电子工程师、电子实验室、生产线及教学、科研的理想测试设备。
1、采用直接数字合成技术(DDS )。
2、主波形输出频率为1µHz ~ 20MHz 。
3、小信号输出幅度可达1mV 。
4、脉冲波占空比分辨率高达千分之一。
5、数字调频、调幅分辨率高、准确。
6、猝发模式具有相位连续调节功能。
7、频率扫描输出可任意设置起点、终点频率。
8、相位调节分辨率达0.1度。
9、调幅调制度1% ~ 100% 可任意设置。
10、输出波形达30余种。
11、具有频率测量和计数的功能。
12、机箱造型美观大方,按键操作舒适灵活。
13、具有第二路输出,可控制和第一路信号的相位差。
概述 12主要特征南京盛普仪器科技有限公司 2一、函数发生器1、波形特性主波形:正弦波、方波波形幅度分辨率:12 bits 采样速率:200Msa/s正弦波谐波失真:-50dBc (频率≤ 5MHz ) -45dBc (频率≤ 10MHz ) -40dBc (频率>10MHz )正弦波失真度: ≤0.2%(频率:20Hz ~ 100kHz )方波升降时间: ≤ 25ns (SPF05A ≤ 28ns )注:正弦波谐波失真、正弦波失真度、方波升降时间测试条件:输出幅度2Vp-p (高阻),环境温度25℃±5℃储存波形:正弦波,方波,脉冲波,三角波,锯齿波,阶梯波等26种波形,TTL 波形(仅F20A ,输出频率同主波形) 波形长度:4096点波形幅度分辨率:12 bits脉冲波占空系数:1.0% ~ 99.0%(频率≤10kHz ),10% ~ 90%(频率10kHz ~ 100kHz )脉冲波升降时间: ≤1uS直流输出误差:≤±10%+10mV (输出电压值范围10mV~10V ) TTL 波形输出:(F05A 、F10A )输出频率:同主波形输出幅度:低电平 < 0.5 V 高电平 > 2.5 V 输出阻抗:600 Ω2、频率特性频率范围:主波形:1µHz ~ 5MHz (SPF05A 型) 1µHz ~ 10MHz (SPF10A 型) 1µHz ~ 20MHz(SPF20A 型)储存波形: 1µHz ~ 100kHz3技术指标分辨率:1µHz频率误差:≤±5×10-4 频率稳定度:优于±5×10-53、幅度特性幅度范围:1mV ~ 20Vp-p(高阻),0.5mV ~ 10Vp-p(50Ω)最高分辨率:2µVp-p (高阻),1µVp-p(50Ω)幅度误差:≤±2%+1mV (频率1KHz正弦波)幅度稳定度:±1 % /3小时平坦度:±5%(频率≤5MHz正弦波), ±10% (频率>5MHz 正弦波)±5%(频率≤50 kHz其它波形), ±20% (频率>50 kHz 其它波形)输出阻抗:50Ω幅度单位:Vp-p,mVp-p,Vrms,mVrms,dBm4、偏移特性直流偏移(高阻):±(10V-Vpk ac),(偏移绝对值≤2×幅度峰峰值)最高分辨率:2µV(高阻),1µV(50Ω)偏移误差:≤±10% +20mV (高阻)5、调幅特性载波信号:波形为正弦波,频率范围同主波形调制方式:内或外调制信号:内部5种波形(正弦、方波、三角、升锯齿、降锯齿)或外输入信号调制信号频率:1Hz ~ 20kHz(内部)100Hz ~ 10kHz(外部)失真度:≤1% (调制信号频率1KHz正弦波)调制深度:1% ~ 100%相对调制误差:≤±5% +0.5 (调制信号频率1KHz正弦波)外输入信号幅度:3Vp-p(-1.5V~ +1.5V)6、调频特性载波信号:波形为正弦波,频率范围同主波形调制方式:内或外(外为选件)调制信号:内部5种波形(正弦、方波、三角、升锯齿、降锯齿))或外输入信号调制信号频率:1Hz ~ 10kHz(内部)100Hz ~ 10kHz(外部)南京盛普仪器科技有限公司 3频偏:内调频最大频偏为载波频率的50%,同时满足频偏加上载波频率不大于最高工作频率+100 kHz 失真度:≤1% (调制信号频率1KHz正弦波) 相对调制误差:≤±5%设置值±50Hz (调制信号频率1KHz正弦波)外输入信号幅度:3Vp-p(-1.5V~ +1.5V)FSK:频率1和频率2任意设定控制方式:内或外(外控:TTL电平,低电平F1;高电平F2)交替速率:0.1ms ~ 800s7、调相特性基本信号:波形为正弦波,频率范围同主波形PSK:相位1(P1)和相位2(P2)范围:0.1 ~ 360.0°分辨率:0.1°交替时间间隔:0.1ms ~ 800s控制方式:内或外(外控TTL电平,低电平P2,高电平P1)8、猝发基本信号:波形为正弦,频率范围同主波形猝发计数:1 ~ 30000个周期猝发信号交替时间间隔:0.1ms ~ 800s控制方式:内(自动)/外(单次手动按键触发、外输入TTL脉冲上升沿触发)9、频率扫描特性信号波形:正弦波扫描频率范围:扫描起始点频率:主波形频率范围扫描终止点频率主波形频率范围。
第十章 PLC0

(1)输入接口电路:采用光电耦合器,防止强电干扰。
直流输入 输入端子 发光二极管
3.3k
内 部
Xn
1000PF
电
470
24V
– + + – COM 光电三极管
路
光-电器件
(10-10)
(2)输出接口电路:均采用模块式。
以继电器形式为例:
继电器输出
Yn
OUT
内 部
内 部 电 路 J
输入采样
程序执行
输出刷新
一个扫描周期
(10-25)
将输入端子的状态读入对应的输入映像 寄存器,随即关闭输入端口。
输入采样
从输入和输出映像寄 存器读入数据,经过 运算后将结果再写入 输出映像寄存器。
程序执行
输出刷新
一个扫描周期
所有指令 执行完毕 ,输出映 像寄存器 状态送至 输出锁存 器
(10-26)
ST XWX NOT DT/Ld C
PC FP PROGRAMMER
AN YWY STK IX/IY D
OR RWR TM TSV E
OT LWL CT CEV F
FN/P FL (BIN) K/H SC (-) OP SRC READ WRT
以是安装了专门的编程通
讯软件的个人计算机。 用户可以通过键盘输
(10-41)
8.ALD(And Load):并联电路块的串联连接指令(与 块指令)。用于并联电路块的串联连接。 – 什么是并联电路块? • 两条以上支路并联形成的电路叫并联电路块。
• 在块电路开始时要使用LD和LDN指令。 • 在每完成一次块电路的串联连接后要写上ALD 指令。
(10-42)
计算机维修技术第3版》第10章计算机系统故障原因分析

1.电源插座和开关
– 主机电源功率不够。 – 设备电源插头/插座接触不良。
2.系统设置问题
– 显示器面板调整参数设置混乱。 – 音箱音量开关关闭等。
3.系统新特性
– 如节能功能自动关闭显示器,硬盘的电源等。
4.灰尘的影响
– 灰尘使电路板的线路、插座等部件出现氧化现象 ,造成干扰信号,导致故障不断。
• Windows XP运行过程 • 运行 • 收集计算机硬件设备列表; • 将设备列表返回给NTLDR; • NTLDR将硬件设备信息加载到注册表中; • 硬件设备检测完毕后,进入系统配置阶段。 • 运行Ntldr • 装载NToskrnl.exe、HAL.dll等核心文件; • 读入注册表信息;加载设备驱动程序。 • 运行Ntoskrnl.exe
– 灰尘造成集成电路芯片散热不良等。
5.人为故障
– 人为拉断电缆或接错电缆; – 人为带电插拔; – 人为强行关机; – 人为硬盘振动等。
– 【补充】机箱内部灰尘
10.2 计算机启动过程分析
1.系统引导过程
(1)系统上电 (2)POST(上电自检) (3)运行主引导记录 (4)装载操作系统 (5)运行操作系统
10.4 计算机常见故障分析
随机性故障分析 不兼容故障分析 硬件烧毁故障分析 常见故障原因分析
10.1 计算机故障特点分析
• 梯田曲线
– 计算机故障的发生规律呈现梯田曲线规律。 – 规律:性能稳定期、故障多发期、产品淘汰期。
1.性能稳定期
• 故障率较低; • 性能稳定期大约1年左右; • 故障类型主要为软件故障和环境故障。
– 运行Smss.exe – 初始化注册表,创立系统环境变量; – 加载Win32k.sys内核模块; – 启动子系统进程Csrss; – 启动登陆进程Winlogon等。 – 运行Winlogon – 创立初始窗口和桌面对象等; – 加载设备驱动程序; – 加载本机平安验证子系统进程〔Lsass.exe〕。 – 运行Services.exe – 加载所有在注册表中登记为开机自动启动的程序
第10章智能仪器与自动测量技术电子测量技术课件

第10章 智能仪器与自动测量技术
2. 智能仪器实际上是一个专用的微型计算机系统, 它由硬件和软件两大部分组成。 1) 智能仪器的硬件部分主要包括CPU、存储器、内 部总线、各种I/O接口、通信接口、人机接口(键盘、 开关、按钮、显示器)等,如图10.1所示。
第10章 智能仪器与自动测量技术
BUS
第10章 智能仪器与自动测量技术
10.4
10.4.1 1. 虚拟仪器(简称 VI)是电子测量技术与计算机技
术更加紧密结合产生的一种新仪器模式,是指以通用 计算机作为核心硬件平台,配以相应的硬件模块作为 信号输入/输出接口,利用仪器软件开发平台在计算机 的屏幕上虚拟出仪器的面板和相应的功能,通过鼠标 或键盘交互式操作完成相应测试测量任务的仪器。
被测件 (D UT)
图10.7 HP75000 VXI仪器系统示意图
第10章 智能仪器与自动测量技术
3. PXI总线 1) PXI PXI总线是PCI总线的增强与扩展,并与现有工业 标准Compact PCI兼容。 2) PXI 为了充分发掘PXI在提供高度集成化的测控平台方 面的潜力,PXI选用开放式软件体系结构,用以定义出 一个与不同类型硬件相连的公共接口。
(5) 被测对象: 随测试任务的不同,被测对象 往往是千差万别的,由操作人员通过测试电缆,接插 件、开关等与程控仪器和设备相连。
第10章 智能仪器与自动测量技术
GP IB总 线
GPIB 接 口 计算机
GPIB 接 口 频 率 合成 器
GPIB 接 口 DMM
GPIB 接 口 频率计
GPIB 接 口 打印机
被 测 器件
图10.3 典型的GPIB自动测试系统
第10章 智能仪器与自动测量技术
第10章 文件系统接口

如下:
FileLock lock(long begin, long end, boolean shared) Shared = true, 共享锁 Shared = false, 排他所
释放锁: FileLock 的Release()。
12
Operating Systems
File 加锁例子 – Java API
26
Operating Systems
目录操作
搜索文件 创建文件 删除文件
列出目录
重命名文件 跟踪文件系统
27
Operating Systems
目录逻辑结构的组织方法
有效:迅速定位文件 命名:方便用户
两个不同的用户的文件名称可以相同 同一文件可以有不同的名称
访问模式:创建,只读,读写,添加等; 打开文件表(Create和Delete除外)
打开文件,并返回指向一个条目的指针。
进程打开文件表:文件指针,存取权限; 系统打开文件表:磁盘位臵,访问日期,文件大 小等。
Close(Fi):将内存中的Fi的内容复制到位于磁 盘上的目录结构中。
9
Operating Systems
一系列代码段,以供装入程序调入内存执行。
4
Operating Systems
文件属性
名称:有些OS区分大小写(如Linux,Unix),有些
不区分(如DOS, Windows) 类型:由OS和程序定义 位臵:指向设备和设备上文件位臵的指针 大小 保护:决定读、写、执行等的访问控制信息 时间、日期和用户标识:文件创建、上次修改和上次 访问都可能有该信息。用于保护、安全和使用跟踪 文件的信息被保存在目录结构中,而目录结构也保存 在外存上
《微机原理及单片机应用技术》课件第10章 定时器原理及应用
10.2 基本定时器
基本定时器TIM6和TIM7只具备最基本的定时功能,就是累加的时钟脉数超过预定值 时,能触发中断或触发DMA请求。由于在芯片内部与DAC外设相连,可通过触发输出 驱动DAC,也可以作为其他通用定时器的时钟基准。基本定时器框图见图
这两个基本定时器使用的时 钟 源 都 是 TIMxCLK , 时 钟 源 经 过PSC预分频器输入至脉冲计数 器TIMx_CNT,基本定时器只能 工作在向上计数模式,在重载寄 存器TIMx_ARR中保存的是定时 器的溢出值。
第10章 定时器原理及应用
本章主要内容
10.1 定时器概述 10.2 基本定时器 10.3 通用定时器 10.4 高级定时器 10.5 STM32F10x定时器相关库函数 10.6 STM32F103定时器开发实例
10.1 定时器的概述
本章讲述微控制器另一个基本的片上外设--定时器。定时器是微控制器必备的片上外 设。微控制器中的定时器实际上是一个计数器,可以对内部脉冲/外部输入进行计数, 不仅具有基本的计数/延时功能,还具有输入捕获、输出比较和PWM输出等高级功能。 定时器的资源十分丰富,包括高级控制定时器、通用定时器和基本定时器。
在低容量和中容量的STM32F103XX系列产品中,以及互连型产品STM32F105XX系 列和STM32F107XX系列中,只有一个高级控制定时器TIM1。而在高容量和超大容量的 STM32F103XX系列产品中,有两个高级控制定时器TIM1和TIM8。 在所有的STM32F10XXX系列产品中,都有通用定时器TIM2~TIM5
10.3.2 时基单元
STM32的通用定时器的时基单元包含计数器(TIMx_CNT)、预分频器(TIMx_PSC)、 和自动装置寄存器(TIMx_ARR)等,如图所示。计数器、自动装载寄存器和预分频 器可以由软件进行读/写操作,在计数器运行时仍可读/写。
网络信息安全第10章 IPSec协议

*
*
隧道模式的AH实现
内部头 通信终点
内部头 通信终点
外部头 IPSec终点
外部头 IPSec终点
*
*
AH隧道模式的优缺点
• 子网所有用户都可透明享受安全网关提供的安全保护; • 子网内部可使用私有IP地址,无须公有IP地址; • 子网内部的拓扑结构被保护。 • 增大网关的处理负荷,容易形成通信瓶颈; • 对内部诸多安全问题(如篡改等)不可控。
加密IP载荷, 认证IP载荷
加密内部IP包, 认证内部IP包
*
*
AH和ESP的嵌套使用
发送方封装时:先用ESP对原始报文加密 再用AH进行完整性计算 接收方解封时:先对数据进行完整性验证 再对通过验证的数据解密 (因为解密非常耗时) IP头+AH头+ESP头+被保护数据包
外部 IP头部
*
*
隧道模式的ESP实现
*
*
ESP传输模式和隧道模式报文的格式
*
*
传输模式和隧道模式中AH和ESP功能的比较
认证服务方式
传输模式SA
隧道模式SA
AH
认证IP载荷和 IP头中的一部分
认证整个内部IP包和 部分外部IP包头部分
不带认证的 ESP
加密IP载荷
加密内部IP包
带认证的 ESP
*
*
(2) AH隧道模式
AH头部插入到新IP头部和原始IP头部之间。 AH验证整个IP包,即隧道模式AH也不能穿越NAT。 发送方 接收方
数据完整性 验证过程
整个IP包和验证密钥作为Hash算法的输入,散列值填充到AH头部的“验证数据”中
经典:第10章-应用密码学-分组密码的工作模式

m n1
Ek (x)
c1
c2
c3
c1
c2
c4
…
c n1
c3
k
E 1
k
E 1
k
E 1
IV
m1
m2
m3
11
CBC模式的特点: 1. 明文块的统计特性得到了隐蔽。
由于在密文CBC模式中,各密文块不仅与当前明文 块有关,而且还与以前的明文块及初始化向量有关, 从而使明文的统计规律在密文中得到了较好的隐蔽。
Cn+1为认证码。
m1
m2
m3
m4
…
m n mn1 r
Ek (x) Ek (x)
Ek (x)
Ek (x)
… Ek (x) Ek (x)
c1
c2
c3
c4 …
cn
c n1
(1) 仅需对明文认证,而不需加密时,传送明文m和认证码Cn+1, 此时也可仅保留Cn+1的 t 个比特作为认证码;
(2) 既需对明文认证,又需要加密时,传送密文C和认证码Cn+1
16
检验方法:
(1)仅需对明文认证而不需加密时,此时验证者仅收到明
文m和认证码Cn+1,他需要:
Step1 产生明文m的校验码 r m n 1 m 1 m n
Step2 利用共享密钥使用CBC模式对(m,r)加密,将得到的
最后一个密文分组与接受到的认证码Cn+1比较,二者一致时 判定接收的明文无错;二者不一致时判定明文出错。
时间 发送 标记 银行
接收 银行
储户姓名 2
储户帐号 2
存款 金额
敌手C通过截收从A到B的加密消息,只要将第5至
第10章(8253定时器)
工作方式 000=方式0 001=方式1 010=方式2 011=方式3
0=二进制 1=BCD码源自100=方式4101=方式5
2.初始化编程:向8253分别写入控制字和计数初值, 顺序为:
注意: 1) A1A0=00 读/写计数器0 A1A0=01 读/写计数器1 A1A0=10 读/写计数器2 A1A0=11 写8253控制字 2)写入计数初值,如果是8位,只写入一次,如果 16位,则先写低8位,后写高8位。
3.控制寄存器:8位,对8253初始化时,由CPU发 来的控制字经数据总线缓冲器、内部数据总线写 入该寄存器。 4.计数通道:8253有3个相互独立的计数通道, 分别为计数器0、计数器1和计数器2 。每个通道 包含一个8位的控制寄存器,用来存放计数器的 工作模式字;一个16位的初值寄存器CR,8253工 作前要对其置初值;一个16位计数执行单元CE, 接收计数初值寄存器CR送来的内容,并对该内容 执行减1计数操作;一个16位输出锁存器OL,锁 存CE的内容,供CPU读取。
• 【例2】IBM/PC微机的某扩展板上使用一 片8253,其端口地址为400H~403H,要 求从定时器0的输出端OUT0得到250HZ的 方波信号,从定时器1的输出端OUT1得 到10HZ的连续单拍负脉冲信号。已知系 统提供的计数脉冲频率为125KHZ,硬件 连接如图所示,试编写程序。
① 确定工作方式 根据题目要求,OUT0端输出的是连续方波,所 以定时器0应工作在方式3,而OUT1端输出连续 的单拍负脉冲,因此,定时器1必须工作在方式2。
1.8253的控制字:用来设置8253每个计数通道的 工作方式及计数初值进制。 如下图所示:
8253工作方式控制字 D7 D6 D5 D4 D3 M2 D2 M1 D1 D0
数字电子技术 第10章 脉冲波形的产生电路
第10章脉冲波形的产生与整形电路内容提要:本章主要介绍多谐振荡器、单稳态触发器和施密特触发器的电路结构、工作原理及其应用。
它们的电路结构形式主要有三种:门电路外接RC电路、集成电路外接RC电路和555定时器外接RC电路。
10.1概述导读:在这一节中,你将学习:⏹多谐振荡器的概念⏹单稳态触发器的概念⏹施密特触发器的概念在数字系统中,经常需要各种宽度和幅值的矩形脉冲。
如时钟脉冲、各种时序逻辑电路的输入或控制信号等。
有些脉冲信号在传送过程中会受到干扰而使波形变坏,因此还需要整形。
获得矩形脉冲的方法通常有两种:一种是用脉冲产生电路直接产生,产生脉冲信号的电路称为振荡器;另一种是对已有的信号进行整形,然后将它变换成所需要的脉冲信号。
典型的矩形脉冲产生电路有双稳态触发电路、单稳态触发电路和多谐振荡电路三种类型。
(1)双稳态触发电路又称为触发器,它具有两个稳定状态,两个稳定状态之间的转换都需要在外加触发脉冲的作用下才能完成。
(2)单稳态触发电路又称为单稳态触发器。
它只有一个稳定状态,另一个是暂时稳定状态(简称“暂稳态”),在外加触发信号作用下,可从稳定状态转换到暂稳态,暂稳态维持一段时间后,电路自动返回到稳态,暂稳态的持续时间取决于电路的参数。
(3)多谐振荡器能够自激产生连续矩形脉冲,它没有稳定状态,只有两个暂稳态。
其状态转换不需要外加触发信号触发,而完全由电路自身完成。
若对该输出波形进行数学分析,可得到许多各种不同频率的谐波,故称“多谐”。
脉冲整形电路能够将其它形状的信号,如正弦波、三角波和一些不规则的波形变换成矩形脉冲。
施密特触发器就是常用的整形电路,它利用其著名的回差电压特性来实现。
自测练习1.获得矩形脉冲的方法通常有两种:一种是();另一种是()。
2.触发器有()个稳定状态,分别是()和()。
3.单稳态触发器有()个稳定状态。
4.多谐振荡器有()个稳定状态。
10.2 多谐振荡器导读:在这一节中,你将学习:⏹ 门电路构成多谐振荡器的工作原理 ⏹ 石英晶体多谐振荡器电路及其优点 ⏹ 秒脉冲信号产生电路的构成方法多谐振荡器是一种无稳态电路,它不需外加触发信号,在电源接通后,就可自动产生一定频率和幅度的矩形波或方波。
计算机组成原理第10章习题指导
T0 MDR→Bus→R2 R2→Bus→E
;E 通过总线送 ALU
2
计算机组成原理第 10 章习题
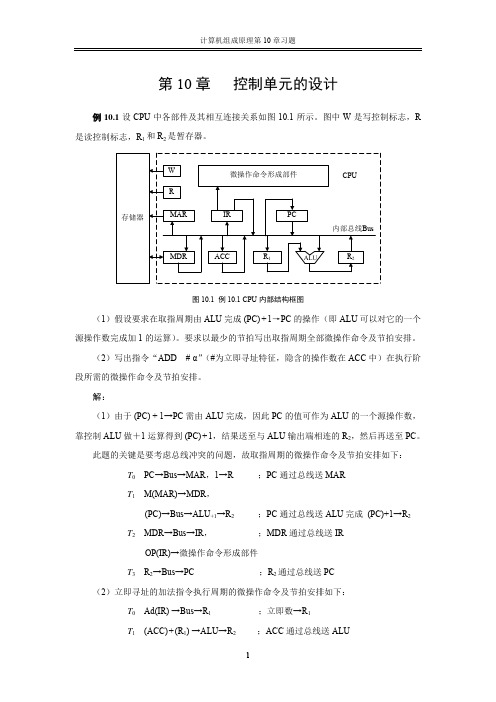
(3)完成“STA @mem”指令所需的微操作命令及节拍安排 取指周期 T0 PC→Bus→MAR,1→R T1 M(MAR) →MDR,(PC) + 1→PC T2 MDR→Bus→IR,OP(IR) →微操作命令形成部件 间址周期 T0 Ad(IR) →Bus→MAR,1→R T1 M(MAR) →MDR 执行周期 T0 MDR→Bus→MAR,1→W T1 ACC→Bus→MDR T2 MDR→M(MAR)
操作控制
28位
判断
3位
下地址
9位
图 10.3 例 10.5 微指令格式
例 10.6 某机共有 52 个微操作控制信号,构成 5 个相斥类的微命令组,各组分别包含 5、 8、2、15、22 个微命令。已知可判定的外部条件有两个,微指令字长 28 位。
(1)按水平型微指令格式设计微指令,要求微指令的下地址字段直接给出后续微指令 地址。
#
(2)中央控制节拍包括取指阶段所有节拍和执行阶段的 T0 、T1 、T2 3 个节拍,完 成取指令和取操作数及乘法运算前的准备工作。局部控制节拍是执行阶段的 T0*和 T1*节拍, 其中 T0*为重复加操作,受 Q 寄存器末两位 Q14Q15 控制,最多执行 15 次;T1*为移位操作, 共执行 14 次。
计算机组成原理第 10 章习题
第 10 章 控制单元的设计
例 10.1 设 CPU 中各部件及其相互连接关系如图 10.1 所示。图中 W 是写控制标志,R 是读控制标志,R1 和 R2 是暂存器。
存储器
W R MAR
MDR
第十章_高速计数及脉冲输出指令

带内部方向控制的 单相增/减计数器 带外部方向控制的 单相增/减计数器
带增减计数输入的双 向计数器
计数
计数 计数
增计数 增计数
复位 计数
方向 方向
减计数 减计数 复位
复位
方向 方向
减计数 减计数 B相计数 B相计数 复位 复位
计数 复位 计数
增计数 增计数 A相计 数 复位 A相计 数
复位
计数
计数 计数
方向
方向 方向 复位 复位 启 动
运 行 模 式 6 7 8
HC1 描 述 I0.6 增计 数 带增减计数输入 的双向计数器 增计 数 增计 数 A相计 数 A相计 数 A相计 数 I0.7 I1.0 I1.1 I1.2
HC2 I1.3 减计 数 减计 数 减计 数 B相计 数 B相计 数 B相计 数 复位 复位 启 动 I1.4 I1.5
第一节 S7-200系列PLC高速计数器
1. 各种CPU支持的高速计数器
高速计数器工作在中断方式,并配有专用的输入口用于计数信号输入、外 启动、外复位及计数方向的控制。
S7-200系列PLC中规定了6个高速计数器编号,在程序中使用时用 HCn来表示(在非程序中一般用HSCn)高速计数器的地址,n的取值范围 为0~5。HCn还表示高速计数器的当前值,该当前值是一个只读的32位 双字,可使用数据传送指令随时读出计数当前值。不同的CPU模块中可 使用的高速计数器是不同的,CPU221、CPU222可以使用HC0、HC3、 HC4和HC5;CPU224、CPU226可以使用HC0~HC5。
光电码盘
PLC I0.0 Q0.6 I0.1 Q1.3 Q1.4 Q1.5 COM
A B C
第章 VISSIM检测器设置与仿真结果输出

精选ppt
12
(2)行程时间检测器设置和数据输出
➢ 运行VISSIM仿真,直到结束
• 文件目录下会有一个扩展名为(*.RSZ)的文件。将该文件 直接拖动到文本文档打开,如下:
精选ppt
27
(5)排队计数器设置
• 提示:各种检测器评价文件扩展名是不一样的,主要的四 种评价的文件输出格式如下:
评价类型 行程时间
延误 数据采集点 排队长度
统计数据
原始数据
RSZ
RSR
VLZ
VLR
MES
MER
STZ
精选ppt
28
(6)仿真结果三种输出方式
• 窗口输出 • 数据库输出 • 文件输出
• 2知识要点
– 行程时间 – 延误时间 – 排队
• 3内容和步骤
精选ppt
2
(1)主要评价参数
• 行程时间:每一个区段由一个起点和一个终点构成。平均 行程时间(包括停车或等待时间)是指车辆通过检测区段的 起点至离开终点的时间间隔。
• 延误时间:实际行程时间与理想的行程时间的差值。延误 时间的测量由一个或几个行程时间的测量来定义,不需要 单独的定义。
• :删除一项 评价指标
• 配置文件将保 存为外部文件 (*.QMK)
22
(5)排队计数器设置
➢ 定义:
• 排队计数器可以设置在路段或连接器上的任何位置。信号 控制交叉口中最合适的设置位置是交叉口的停车线。排队 将从设置位置起往上游方向计算。
• 定义排队计数器的步骤如下:
• 点击左侧工具栏中 激活排队计数器模式;鼠标左键选择 需要设置排队计数器的路段,在目标位置点右键设置排队 计数器,弹出对话框修改相关参数,点击确定完成设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
④ 控制寄存器 主要操作: ⑤主要操作:
往控制寄存器设置控制字 往计数器设置初值 从计数器读取计数值
2.8253的引脚 的引脚
引脚图
3. 8253控制寄存器的格式 控制寄存器的格式
• • • •
编程没有太多严格的顺序规定。 遵守下列两条即可: ① 对计数器设置初值前必须先写控制字。 ② 初值设置时,要符合控制字中的格式规 定(即只写高位还是只写低位等)。
1.计数 定时的功能 计数/定时的功能 计数
•对外部事件发生次数进行计数 对外部事件发生次数进行计数 •计算机系统经常用到定时信号,如DRAM刷新定时 计算机系统经常用到定时信号, 计算机系统经常用到定时信号 刷新定时 计数和计时本质上是相同的, 计数和计时本质上是相同的,它们都是对一个输入脉冲进行 计数,如果输入脉冲的频率一定, 计数,如果输入脉冲的频率一定,那么记录脉冲的个数与所 需的时间是一一对应的关系。 需的时间是一一对应的关系。 例如输入脉冲频率为2MHz,那么计数2×106 ,那么计数 × 例如输入脉冲频率为 计时1秒 计时 秒
控制寄存器 初始值寄存器
CLK
GATE 计数器 计数输出寄存器 状态寄存器 OUT
4.工作原理:对CLK信号进行减 计数 工作原理: 信号进行减1计数 工作原理 信号进行减
首先, 把控制字写入控制寄存器, 首先,CPU把控制字写入控制寄存器,计数初始值写入初值寄存器 把控制字写入控制寄存器 计数从初值开始,每当CLK信号出现一次,计数值减 信号出现一次, 计数从初值开始,每当 信号出现一次 计数值减1 当计数值减到0, 当计数值减到 ,从OUT端输出规定的信号 端输出规定的信号 CLK信号出现时,计数器是否减1,由门控信号 信号出现时,计数器是否减 ,由门控信号GATE控制 信号出现时 控制
•读出命令 读出命令 1)发出锁存命令,使当前计数值锁存在OL中 )发出锁存命令,使当前计数值锁存在 中 2)读OL,获得当前计数值 ) , 端口地址为70H、71H、72H,控制 例:设三个计数器的CR/OL端口地址为 设三个计数器的 端口地址为 、 、 , 寄存器端口地址73H。读出计数器 的当前计数值,放在 中 的当前计数值, 寄存器端口地址 。读出计数器0的当前计数值 放在BX中 MOV AL, 0H OUT 73H, AL IN AL, 70H MOV BL, AL IN AL, 70H MOV BH, AL
模式0的时序图
(2) 模式 模式1—— 可重复触发的单稳态触发器 ①写入控制字后OUT以高电平作为起始状态,GATE 上升沿到来时下一CLK起OUT变低,直到计数到0 ②计数到0,OUT转高,直到下一次触发后第1个CLK 来前。 ③如果计数初值为N,输出OUT产生持续N个CLK的 负脉冲。 ④模式1可以重复触发,一个负脉冲结束后,又来一个门 控上升沿,重复上述过程 ⑤如在输出脉冲期间又来一个门控上升沿,则从下一 CLK起又从初值减1延长 ⑥如在输出脉冲期间又写入新计数值,当前输出不受影 响,除非又来一个门控信号,触发后按新计数初值减1 计数.
计 数 器/ 定 时 器 的 基 本 原 理 图
5.计数器 定时器可以有下面几种工作模式: 计数器/定时器可以有下面几种工作模式 计数器 定时器可以有下面几种工作模式: ①计数结束产生中断 ②可重复触发的单稳态触发器 ③分频器 ④方波发生器 硬件触发选通信号发生器 ⑤硬件触发选通信号发生器 ⑥软件触发选通信号发生器
第十章 计数器和定时器
定时信号的获得: 定时信号的获得: (1)软件方法 ) 使用延时子程序 使用延时子程序 (2)硬件方法 ) 不可编程硬件、计数器/定时器 不可编程硬件、计数器 定时器 各有优缺点
10.1 可编程计时器 计数器 可编程计时器/计数器 计数器8253 一、计数/定时的工作原理 计数 定时的工作原理
三、8253的工作模式 的工作模式 1.工作模式的分类: 工作模式的分类: 工作模式的分类 ①计数结束产生中断 ②可重复触发的单稳态触发器 ③分频器 ④方波发生器 ⑤硬件触发选通信号发生器 硬件触发选通信号发生器 ⑥软件触发选通信号发生器
工作模式决定以下内容: 工作模式决定以下内容: 1)门控信号的影响 ) 高电平允许, 高电平允许,当GATE=0,即使出现 ,即使出现CLK,也不计数 , ——模式 ,2,3,4 模式0, , , 模式 上升沿允许(上升沿触发) 上升沿允许(上升沿触发) ——模式 ,5 模式1, 模式 2)OUT信号的状态 ) 信号的状态 写入控制字后, 写入控制字后, OUT的状态 的状态 计数过程中, 计数过程中, OUT的状态 的状态 计数终了, 计数终了, OUT的状态 的状态 3)计数操作可否重复 ) 不可重复——模式 ,4 模式0, 不可重复 模式 自动重复——模式 ,3 模式2, 自动重复 模式 条件重复——模式 ,5 模式1, 条件重复 模式
4. 8253的编程命令 的编程命令 编程原则: ① 设置初值前必须先写控制字 ② 初值设置要符合控制字中的格式规定 编程命令有两类: ① 读出命令 ② 写入命令 设置控制字命令 设置初始值命令 锁存命令
举例: 举例:
•初始化 初始化
1)写入控制字 ) 2)按控制字要求写入计数初值 ) 计数器初值计算: 计数器初值计算:N=fCLK/fOUT
模式1的时序图:
(3) 模式 模式2——分频器 分频器
模式2特点:
是N分频的计数器 正脉冲为N-1个时钟脉冲宽度 负脉冲为1个时钟脉冲宽度
模式2的时序图 :
(4) 模式 模式3——方波发生器 方波发生器
模式3特点:
和模式2类似,但输出为方波或基本对称的 矩形波
模式3的时序图 :
方式3举例: 方式 举例: 举例 例:计数器工作模式3,计数器初值15,时钟脉冲频率为 计数器工作模式 ,计数器初值 , 2MHz,确定OUT端输出方波的特性。 ,确定 端输出方波的特性。 端输出方波的特性 解:TCLK=1/2MHz=500ns 计数器初值15为奇数,输出分频波高电平宽度 计数器初值 为奇数, 为奇数 TCLK(N+1)/2=4µs µ 输出分频波低电平宽度 TCLK(N-1)/2=3.5µs µ
(5) 模式 模式4——软件触发的选通信号发生器 软件触发的选通信号发生器
模式4特点:
当计数到0时,输出变为低电平,并持续一 个时钟周期变为高电平。
模式4的时序图 :
方式4举例: 方式 举例: 举例
工作模式4,初始化计数器,使装入计数器10 后 例:计数器0工作模式 ,初始化计数器,使装入计数器 µs后 计数器 工作模式 产生选通信号(设时钟频率 设时钟频率2MHz,8253端口地址为 端口地址为50H~53H)。 产生选通信号 设时钟频率 端口地址为 。 解:n+1=T/ TCLK=10/0.5=20 n=19=13H MOV AL, 18H OUT 53H, AL MOV AL, 13H OUT 50H, AL
二、8253的编程结构 的编程结构 1. 结构
1片8253内部有三个计数器,结构完全相同。 片 内部有三个计数器, 内部有三个计数器 结构完全相同。 每个计数器内部都有一个8位控制寄存器,三个控制寄存器使 每个计数器内部都有一个 位控制寄存器, 位控制寄存器 用相同的端口,在编程结构图中画为一个。 用相同的端口,在编程结构图中画为一个。 8253没有状态寄存器。 没有状态寄存器。 没有状态寄存器 每个计数器的初值寄存器(CR)、输出锁存器(OL)都是16位 每个计数器的初值寄存器( )、输出锁存器( )都是 位 )、输出锁存器 的,但它们对应相同的一个8位端口地址,所以16位的 、OL 但它们对应相同的一个 位端口地址,所以 位的CR、 位端口地址 位的 作为两个8位寄存器读写,由控制寄存器控制读写高8位/低8位。 作为两个 位寄存器读写,由控制寄存器控制读写高 位 低 位 位寄存器读写
• ④计数过程中又有新计数值写入,CE停止原 计数,下一个CLK起按新计数值计数. • ⑤启动计数法:在GATE=0时写入初值后, 当GATE由0变为1时启动计数; • 在GATE=1时通过写入初值,启动计数 • ⑥停止计数法: 在计数过程中,当GATE 由1变为0时停止/暂停计数; • 计数器减1到0,自然停止计数; • 写控制字,使某计数器进入复位状态。
控制寄存器——决定工作模式 决定工作模式 控制寄存器 状态寄存器——反应工作状态 状态寄存器 反应工作状态 初值寄存器——计数的初值 初值寄存器 计数的初值 计数输出寄存器——CPU从中读 计数输出寄存器 从中读 当前计数值 计数器——执行计数操作, 执行计数操作, 计数器 执行计数操作 CPU不能访问 不能访问
因此,使用同一个芯片,既能计数,又能计时 计时器/计数器 因此,使用同一个芯片,既能计数,又能计时——计时器 计数器 计时器
2.计数器 定时器的用处: 计数器/定时器的用处 计数器 定时器的用处: ① 作为中断信号 ② 输出精确的定时信号 ③ 作为波特率发生器 ④ 实现延迟
3.组成: 组成: 组成
端口地址为70H、71H、72H,控制 例:设三个计数器的CR/OL端口地址为 设三个计数器的 端口地址为 、 、 , 寄存器端口地址73H。计数器 ,工作模式 ,CR/OL使用 位, 使用16位 寄存器端口地址 。计数器1,工作模式1, 使用 初值为1234,计数值使用 初值为 ,计数值使用BCD MOV AL, 73H OUT 73H, AL MOV AX, 1234H OUT 71H, AL MOV AL, AH OUT 71H, AL
模式0――计数结束产生中断 ⑴ 模式 计数结束产生中断 能使OUT产生正阶跃信号,常作为中断请求信号。 ①写入控制字后,OUT起始电平为低电平作为初始 状态 ②再写入计数初值n,必须等下一个CLK的下降沿, 初值才送执行部件CE ③门控GATE=1,CE立即开始对CLK下降沿做减1计 数,此时若GATE=0则停止计数,但门控不影响OUT 电平,所以计数时如有一段时间GATE=0, 则OUT低 电平相应延长。