静态法测定金属丝的弹性模量及数据处理
物理实验论文静态法测弹性模量
静态法测弹性模量笑嘻嘻(东南大学自动化学院,南京, 210096)摘要:实验室的静态法测弹性模量的实验,给了工作者一些启发和疑惑,工作者在实验室外经过对静态法的光杠杆的放大研究,和实验中的误差分析,通过实验数据和科学资料,对静态法测弹性模量的实验进行了探讨和改进。
比较科学的分析了实验,总结出实验的规律。
关键词:静态,光杠杆,放大,摩擦Measure Elastic Modulus By Static Method笑嘻嘻(south east university,nanjing 210096)Abstract:The experiment of the measure elastic modulus by static method in the lab, giving the worker some inspire and some questions. So the worker discuss the light lever of the static method out of the lab and the error of the experiment. Through the data of the experiment and the scientific datum, worker probe and improve the experiment of the measure elastic modulus by static method. Discuss the experiment scientifically, and summary the experiment’s law.key words: Static method, light lever, blow up, friction静态法测弹性模量试验后,对其试验中的具体原理的工作问题和实验中存在的误差问题有一些自己的研究,通过对实验数据的分析和对比,和实验模型的建立,实验过程中的摩擦影响,都进行了分析,对实验的理解更加深刻,为以后的实验打好了思索探讨的基础,得出了自己的结论。
金属杨氏模量的测量 (2)

—逐差法和图解法。返回实验仪器 Nhomakorabea图一
返回
实验仪器——实物图
A
S G B C J D A、B—金属丝两端螺丝夹;C—平台;D—砝码;G—光杠杆;J— 仪器调节螺丝;T—望远镜;S—标尺 T
实验仪器——结构示意图
S
T
D
A、B—金属丝两端螺丝夹;C—平台;D—砝码;G—光杠杆;J— 仪器调节螺丝;T—望远镜;S—标尺
3.测量:采用等增量测量法。
(1)将依次增减砝码的读数记入表格中。 (2)将相关长度量L、R、b、d等的测量数据记入表格。
返回
数据处理
1.将依次加减砝码所得数据,用逐差法处理求 N
N 4 n7 n3
N3 n6 n2
N 2 n5 n1
N1 n4 n0
1 N N1 N 2 N 3 N 4 4
2.计算E值并与公认值比较( E 1.981011 N 2 ) m 3.计算直接测量量L、R、b及d和 N 的不确定度(求合成 不确定度)
(1)钢丝原长L:
u( L)
u
u
2 2 L u L B B
N 0.05 4 cm
思考题
1.本实验中,各个长度量用不同的仪器来测 定,是怎样考虑的?为什么? 2.分析本实验测量中哪个量的测量对E的结果 影响最大?如何进一步改进? 3.根据测量结果,练习用作图法处理数据, 并求出E。
返回
实验原理
1.基本原理 根据胡克定律,在弹性限度内,应变与应 力成正比,即 L ⑴ F S E ----------
L
2.光杠杆镜尺法测微小伸长量,测量原理 如图㈡所示。 光杠杆镜尺法是一种利用光学原理把 微小长度的变化加以放大后,再进行测量 的方法。
静态拉伸法测弹性模量实验报告

静态拉伸法测弹性模量实验报告弹性模量(亦称杨氏模量)是固体材料的一个重要物理参数,它标志着材料对于拉伸或压缩形变的抵抗能力。
作为测定金属材料弹性模量的一个传统方法,静态拉伸法在一起合理配置、误差分析和长度的放大测量等方面有着普遍意义,但这种方法拉伸试验荷载大,加载速度慢,存在弛豫过程,对于脆性材料和不同温度条件下的测量难以实现。
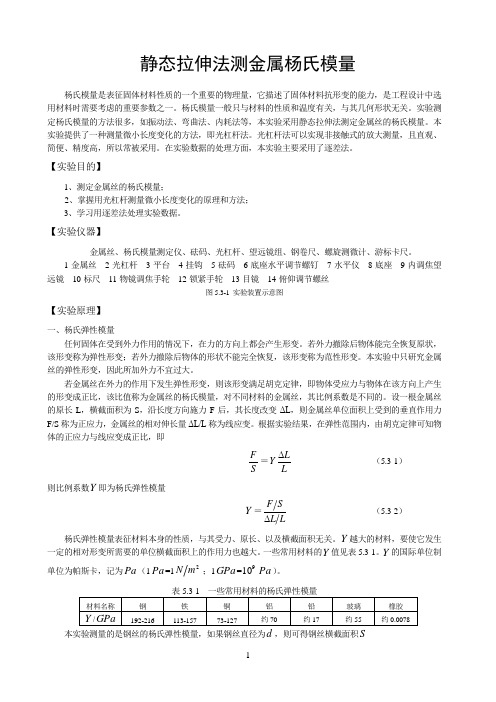
实验原理及仪器胡克定律指出,对于有拉伸压缩形变的弹性形体,在弹性范围内,应力F 与应变L∆成正比,即式中比例系数E 称为材料的弹性模量,它是描写材料自身弹性的物理量.改写上式则有、(1)可见,只要测量外力F 、材料(本实验用金属丝)的长度L 和截面积S ,以及金属丝的长度变化量L ∆,就可以计算出弹性模量E 。
其中,F 、S 和L 都是比较容易测得的,唯有L ∆很小,用一般的量具不易准确测量。
本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
本实验采用的主要实验仪器有: 弹性模量仪(如图1)、光杠杆镜尺组(如图2)、螺旋测微器、米尺、砝码等。
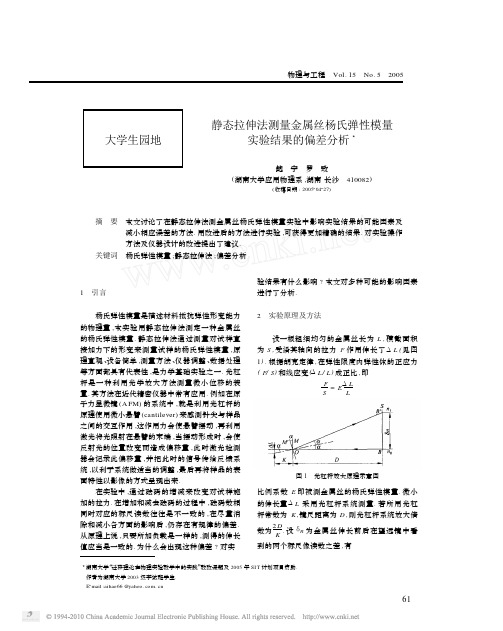
图1 弹性模量测量装置图2 光杠杆 图3 光杠杆放大原理仪器调节好后,金属丝未伸长前,在望远镜中可看到由平面镜反射的标尺的像,将望远镜的细叉丝对准标尺的刻度,读出读数为R 0;将砝码加在砝码托上后,金属丝被拉长,光杠杆镜面向后倾斜了α角.根据光的反射定律可知,此时在望远镜中细叉丝对准的是镜面反射后的标尺上的刻度R 1,其对应的入射光和反射光的夹角为2α。
设N=R 1-R 2,K 为光杠杆的前后足之间的垂直距离,D 为光杠杆镜面到标尺之间的距离,考虑到,角很小,所以有可得∆ (2)将式(2)代入式(1)即得拉伸法测定金属丝弹性模量的计算公式E (3)式中d 为金属丝的直径.实验步骤1.1 调整弹性模量仪① 调节三脚底座上的调节螺丝,使立柱铅直。
② 将光杠杆放在平台上,两前足放在平台前面的横槽内,后足放在夹子B 上,注意后足不要与金属丝相碰。
静态法测定金属丝的弹性模量及数据处理

液压调节阀
接口
图1 1
液压调节
1. 测量杨氏弹性模量的原理公式 设金属丝的直径 d,将 S
d2
4
带入式(1):
Y
2. 光杠杆放大原理:
4 FL d 2 L
(2)
3 2 C 2(a)
B
B
图 2(b)
C
图 2(a)为新型光杠杆的结构示意图。在等腰三角形铁板 1 的三个角上,各有一个尖头螺钉, 底边连线上的两个螺钉 B 和 C 称为前足尖,顶点上的螺钉 A 称为后足尖,2 为光杠杆倾角调节架,3 为光杠杆反射镜。调节架可使反射镜作水平转动和俯仰角调节。测量标尺在反射镜的侧面并与反射 镜在同一平面上,如图 2(b)所示。测量时两个前足尖放在杨氏模量测定仪的固定平台上,后足尖 则放在待测金属丝的测量端面上,该测量端面就是与金属丝下端夹头相固定连接的水平托板。当金 属丝受力后,产生微小伸长,后足尖便随测量端面一起作微小移动,并使光杠杆绕前足尖转动一微 小角度,从而带动光杠杆反射镜转动相应的微小角度,这样标尺的像在光杠杆反射镜和调节反射镜 之间反射,便把这一微小角位移放大成较大的线位移。这就是光杠杆产生光放大的基本原理。下面 我们来导出本实验的测量原理公式。
L b tan b
N P1 P0 D tan 4 4 D
2
所以它的放大倍数为 A0
P 4D N P 1 0 L L b 16 FLD Y d 2bN
带入式(2)可得: (3)
式中 b 称为光杠杆常数或光杠杆腿长,为光杠杆后足尖 A 到两前足尖 BC 连线的垂直距离,如图 4(a) 所示
用光杠杆放大法测定金属丝的杨氏模量
一、 前言 杨氏模量是工程材料重要参数,它反映了材料弹性形变与内应力的关系,它只与材料性质有关, 是选择工程材料的重要依据之一。 设长为 L,截面积为 S 的均匀金属丝,在两端以外力 F 相拉后,伸长ΔL。实验表明,在弹性范 围内,单位面积上的垂直作用力 F/S(正应力)与金属丝的相对伸长ΔL/L(线应变)成正比,其比例 系数就称为杨氏模量,用 Y 表示,即
静态拉伸法测材料的弹性模量实验报告
静态拉伸法测材料的弹性模量实验报告
静态拉伸法测材料的弹性模量实验报告实验日期:2012年12月1日—4日,2012年11月24日9点20分
试样编号:12实验者姓名:胡超祥所在班级:08机电2班实验目的:1.学习与掌握静态拉伸法测定钢材弹性模量;2.了解钢材弹性模量的实际意义。
3.巩固理论知识。
实验原理:静态拉伸法测定钢材的弹性模量是将被测试样放入试样夹中并施以拉伸负荷后,通过测定试样开始破坏前单位面积上的变形来确定试样的弹性模量,即为弹性模量。
一般钢铁材料具有良好的塑性和韧性,其弹性模量比较大,因此可采用这种方法测得它们的弹性模量。
主要仪器:1、金属丝线材。
- 1 -。
金属丝杨氏弹性模量的测定及其实验数据
金属丝杨氏弹性模量的测定及其实验数据【实验目的】1.学习静态拉伸法测金属丝的杨氏模量。
2.掌握用光杠杆法测量微小长度变化的原理和方法。
3.利用有效的多次测量,及相应处理方法来减小误差。
【实验仪器】杨氏模量测量仪,光杠杆,望远镜尺组,米尺,游标卡尺【实验原理】根据胡克定律,金属丝的杨氏弹性模量, L是一个微小长度变化量,当金属丝直径为0.5毫米时, L约为10-5米。
实验中采用光杠杆镜尺法测量。
利用光杠杆镜尺法由几何原理可得,光杠杆的放大倍数为β=2D/b,一般D=1.5—2.0米,b=7.0厘米,所以放大倍数约为40倍。
通过在增加(减)砝码的同时测出标尺读数Xi和其他的长度量L、D、d、b,就能求得金属丝的杨氏弹性模量Y. 【实验内容】1.调整支架,使金属丝处于铅直位置2.调光杠杆和望远镜,使能在望远镜中看清标尺像,并无视差。
3.通过增减砝码,测出相应的标尺读数Xi′和Xi″(共加五个砝码),由Xi= Xi′/ Xi″,用逐差法求出?Xi。
重复一次。
4.测出L、D、d、b,重复六次,求出杨氏模量,【注意事项】1.仪器一经调好,测量开始,切勿碰撞移动仪器,否则要重新调节,老师检查数据前也不要破坏调节好的状态,否则一旦有错误,将难以查找原因或补作数据。
2.望远镜、光杠杆属精密器具,应细心使用操作。
避免打碎镜片,勿用手或他物触碰镜片。
3.调节旋钮前应先了解其用途,并预见到可能产生的后果或危险,不要盲目乱调,以免损坏仪器,调节旋钮时也不要过分用力,防止滑丝。
4.用螺旋测微计测量钢丝直径时,要端平测微计,避免钢丝弯曲,【数据处理】1.增减重量时钢丝伸缩量的记录数【思考题】1.在本实验中,为什么可以用不同精确度的量具测量多种长度量?为什么有些需要多次测量,有些单次测量就可以?2. 如何用十几个砝码即快又精确地测量出金属丝的平均伸长量,应该用什么方法来计算?3.光杠杆法可测微小长度变化,其主要是采用了光放大原理,放大率为β=2D/b 。
指导书-04静态拉伸法测金属杨氏模量
静态拉伸法测金属杨氏模量杨氏模量是表征固体材料性质的一个重要的物理量,它描述了固体材料抗形变的能力,是工程设计中选用材料时需要考虑的重要参数之一。
杨氏模量一般只与材料的性质和温度有关,与其几何形状无关。
实验测定杨氏模量的方法很多,如振动法、弯曲法、内耗法等,本实验采用静态拉伸法测定金属丝的杨氏模量。
本实验提供了一种测量微小长度变化的方法,即光杠杆法。
光杠杆法可以实现非接触式的放大测量,且直观、简便、精度高,所以常被采用。
在实验数据的处理方面,本实验主要采用了逐差法。
【实验目的】1、测定金属丝的杨氏模量;2、掌握用光杠杆测量微小长度变化的原理和方法;3、学习用逐差法处理实验数据。
【实验仪器】金属丝、杨氏模量测定仪、砝码、光杠杆、望远镜组、钢卷尺、螺旋测微计、游标卡尺。
1-金属丝 2-光杠杆 3-平台 4-挂钩 5-砝码 6-底座水平调节螺钉 7-水平仪 8-底座 9-内调焦望远镜 10-标尺 11-物镜调焦手轮 12-锁紧手轮 13-目镜 14-俯仰调节螺丝图5.3-1 实验装置示意图【实验原理】一、杨氏弹性模量任何固体在受到外力作用的情况下,在力的方向上都会产生形变。
若外力撤除后物体能完全恢复原状,该形变称为弹性形变;若外力撤除后物体的形状不能完全恢复,该形变称为范性形变。
本实验中只研究金属丝的弹性形变,因此所加外力不宜过大。
若金属丝在外力的作用下发生弹性形变,则该形变满足胡克定律,即物体受应力与物体在该方向上产生的形变成正比,该比值称为金属丝的杨氏模量,对不同材料的金属丝,其比例系数是不同的。
设一根金属丝的原长L ,横截面积为S ,沿长度方向施力F 后,其长度改变ΔL ,则金属丝单位面积上受到的垂直作用力F/S 称为正应力,金属丝的相对伸长量ΔL/L 称为线应变。
根据实验结果,在弹性范围内,由胡克定律可知物体的正应力与线应变成正比,即SF =L L Y ∆ (5.3-1)则比例系数Y 即为杨氏弹性模量Y =LL SF ∆ (5.3-2) 杨氏弹性模量表征材料本身的性质,与其受力、原长、以及横截面积无关。
5 准静态拉伸法测量金属丝的杨氏弹性模量
实验原理
最简单的形变是棒状物体受外力作 用力后伸长或缩短。设物体长为L, 截面积为s,沿长度方向施力为F 后,物体伸长(或缩短)为ΔL。比 值F/s 为单位面积上的作用力,称为 胁强。比值ΔL/L 为物体的相对伸长 (或缩短),称为胁变。在物体的 弹性限度内,胁强与胁变成正比。 比例系数
y= s ΔL L F
实验步骤
2. 观测伸长的变化
在砝码挂钩上逐次加0.5 kg的砝码,然后从望远镜中读出对 应的标尺读数Si 共8次,然后逐次将所加的砝码减少0.5 kg并 记下对应的读数Si’,取正、反两次标尺读数的平均值
Si + Si′ Si = (i = 0, 1, 2, ", 7) 2
实验步骤
3. 准确测量有关数据
A
N
M B 望 远 镜 及 尺
T
C
法 码
(1)
P
称为杨氏弹性摸量。
实验原理
实验原理
光杠杆的原理见下图。增(减)砝码时,金属丝将伸长 (或缩短)ΔL ,光杠杆的后足尖也随着圆柱体C一道下降 (或上升)ΔL ,而前面两足保持不动,于是主杆转过一 角度θ ,同时平面镜的法线也转过相同的角度θ 。用望远 镜T和标尺N测得角θ ,设光杠杆后足到前两足连线的距离 为l,可算出ΔL
数据处理
本实验采用下面两种方法处理数据,分别求出所测钢丝的杨 氏弹性模量y。
1、用逐差法处理数据(逐差法见附录),计算y 和Δy ,正确 表达实验结果。 2、用作图法处理数据。
思考题
1. 测钢丝的伸长量时,为什么要取增减砝码的伸长之平均值? 2. 推导相对不确定度合成公式E=Δy/y。利用该式分析本实验的 总不确定度主要来源于哪一个测量量。 3. 怎样理解光杠杆的放大原理?
金属丝弹性模量的测定
光的衍射和干涉法测金属丝的弹性模量作者:边辉(青岛科技大学化学与分子工程学院应用化学104班)摘要:测量金属丝的弹性模量分为静态法和动态法,应用最普遍的是利用光杠杆原理测量金属丝的细微变化,从而计算出杨氏弹性模量。
同样是拉伸法,我们对测量金属丝微小变化的方法和装置进行改进,分别利用光的衍射中单缝的改变和劈尖干涉中空气层的厚度来完成对细微变化的测量,通过测量单缝衍射中央明条纹和劈尖干涉中相邻明(暗)条纹的距离计算出金属丝长度的改变量,从而计算出杨氏弹性模量。
关键词:弹性模量;单缝衍射;劈尖干涉引言:我们在用拉伸法测金属丝的弹性模量时,利用光杠杆测量金属丝在砝码带动下发生的细微变化,可以得到比较理想的实验结果。
但是,寻找变化的过程很麻烦,需要两个人密切合作,而且采用厘米刻度尺来测量,引入误差较大。
我们改进后的方案可以同时克服这两个弊端,使读数再精确一位。
改进前的方案【实验原理】(1)弹性模量任何固体在外力作用下都要发生形变。
当外力撤除后物体能够完全恢复原状的形变称为弹性形变。
如果加在物体上的外力过大,以致外力撤除后物体不能完全恢复原状而留下剩余形变,称为范性形变。
设钢丝截面积为S,长为L,在外力F作用下拉伸长度ΔL。
根据胡克定律,在弹性限度内,应力FS与应变ΔLL成正比,即FS=EΔLL(1-1)式中,比例系数E就是材料的杨氏弹性模量,简称弹性模量,它表征材料本身的性质,E越大的材料要使它发生一定的应变所需的单位横截面上的力也就越大。
由式(1-1)可得E=FLSΔL = 4FLπd2ΔL(1-2)式中,d为钢丝直径,在式(1-2)中,F、d、L都比较容易测量,而伸长量ΔL由于很小,很难由普通测量长度仪器测出,本实验利用光杠杆法来测量。
(2)光杠杆原理:图2-2是弹性模量测量仪,左边是伸长仪,右边是镜尺组。
在金属丝下面是施加外力的砝码托盘,在平台上是一个放置一个有三足尖的反射镜(光杠杆),其后足尖位于夹持件上,而前足尖置于平台的沟槽里,当托盘里增加砝码时,就可以改变反射镜的倾角。
用静态拉伸法测材料的弹性模量
实验目的
1)学习用拉伸法测量材料弹性模量
2)了解光杠杆结构及利用光杠杆测量微小长度变化量的原理,掌握使用方法
3)掌握各种测量长度量具的正确使用方法及仪器误差
4)学习用逐差法处理实验数据
5)学习直接测量量和间接测量量不确定度的计算,学习正确表示测量结果
实验仪器
弹性模量仪(包括实验架、望远镜、数字拉力计等)、千分尺(25mm,0.1mm)、游标卡尺(13cm,0.02mm)、钢卷尺(3m,1mm)、钢丝
实验原理
1.测量原理
物体受力将发生形变,当外力去掉后能恢复原状的物体就是弹性体,相应形变称为弹性形变。
实验结果表明,在弹性限度内,应力和相关应变成正比,这就是胡克定律
对于长度为L的细长物体,其均匀截面积为A,沿长度方向受拉力F作用时伸长为ΔL,根据胡克定律有 ,式中,F/A为作用在单位面积上的力,称为应力;ΔL/L为单位长度上的形变称为应变;比例系数E称为材料的弹性模量,单位是N/m^2。
对钢材而言,拉伸和压缩时弹性模量相同。
由 可得
若施加拉力为F=mg,对于直径为d的钢丝,其弹性模量可写成●
2.用光杠杆方法测量钢丝伸长量ΔL的原理
光杠杆放大原理:利用光的反射放大微小位移
3.常用长度测量量具的原理与使用
实验步骤
1.实验仪器调节
(1)调节实验架
1)将光杠杆动足尖自由地放置在下夹头上表面
2)连接电源
3)旋转施力螺母
(2)调节望远镜
1)粗调望远镜
2)细调望远镜
2.实验测量
1)用钢卷尺测量钢丝原长L
2)用千分尺测量钢丝直径d
3)测量标尺刻度x和拉力m
4)实验完成后,旋松施力螺母,关闭数字拉力计。
静态拉伸法测量钢丝的杨氏模量-北京化工大学
3.开始测量前放一两个槽码,从望远镜里观察标尺 示数的变化,记下初位置。
4. 在钩码上逐次加0.5千克槽码,记下标尺示数 n i,直到4.5
千克。再每减一个槽码,记录一次示数 ni ,直到减完。
5. 用卷尺测L, D, b各一次,测b时,可先在纸上压出印,在 测此印。
6. 用螺旋测微器测量钢丝直径d,选上中下不同方位共测5 次。
五、注意事项:
(1)光杠杆、望远镜和标尺应在开始测量前调好,实验过程中绝对 不能调整移动,否则所测数据无效,实验应从头开始。
d u(d )
uC (d ) uA2 (d ) uB2 (d )
uA (d
)
S(d
),
uBBiblioteka (d)0.004 3
cm
(4)根据不确定度的传播公式,计算E的不确定度,并写 出结果表达式
E E UC (E)
(5) 将实验中求出的与公认值E0=2.0×1011进行比较,写出 百分误差。
4
重力求出。在实际测量中,由于钢丝伸长量ΔL的值很小,
约数量级。因此ΔL的测量采用光杠杆放大法进行测量。
光杠杆是根据几何光学原理,设计而成的一种灵敏度较高 的测量微小长度或角度变化的仪器。
右图是光杠杆放大原 理图
假设开始时,镜面M的 法线正好是水平的, 则从光源发出的光线 与镜面法线重合,并 通过反射镜M反射到标 尺n0处。当金属丝伸 长ΔL,光杠杆镜架后 夹脚随金属丝下落
ΔL,带动M转一θ角,镜面至 M, 法线也转过同一角度,根
静态拉伸法弹性模量测量实验的调整及误差分析
静态拉伸法弹性模量测量实验的调整及误差分析静态拉伸法是一种通过外力作用下的材料变形来测量材料弹性模量的方法。
该方法简便易行,但在实验操作过程中需要注意多个因素,因为误差的存在会显著影响最终的测量结果。
本文将针对静态拉伸法弹性模量测量实验的调整及误差分析进行阐述。
调整由于静态拉伸法实验中需要保证材料在一定范围内的线弹性状态,因此需要进行实验调整。
以下几个方面是实验调整的主要内容:1. 实验设备的校准实验用的拉伸机的并非一成不变,因此需要对实验设备进行校准。
校准过程中需要检查实验设备中的额定载荷是否与校准设备的载荷一致。
如果校准时发现偏差过大,需要进行相应的调整。
2. 样品的准备选用的样品必须满足一定的要求。
首先,选用的样品必须与实际应用相似,具有代表性。
其次,样品的尺寸必须符合实验要求,且必须要去除任何可能影响实验的缺陷和污渍。
3. 实验方法的调整弹性模量分为改性弹性模量和杨氏模量两种。
在确定测量方法时,要根据所需弹性模量的类型来进行实验方法的选择。
同时,还需要注意实验温度、湿度等条件,确保实验条件的一致性。
误差分析在静态拉伸法测量实验中,误差的存在是无法避免的。
对于这些误差因素,可以进行以下方面的分析和修正:1. 样品本身的误差在样品制备的过程中,特别是在切割和磨削等工序中,存在着材料损失和极微小的变形等误差因素。
因此,在实验之前需要进行一定的测量和修正,以确保样品的准确性。
实验设备的误差包括机械误差和电子误差。
机械误差包括设备的刻度尺不准确、夹具不平行等。
电子误差包括传感器的性能不佳等。
需要注意的是,在实验中,误差是随机存在的,因此实验需要进行多次测量以降低误差的影响。
3. 实验操作人员的误差实验操作人员的经验和技巧也会影响实验结果,例如在操作过程中对样品夹具的调整、给定的载荷等要素的掌握情况。
因此,为了减少误差,需要对实验人员进行专业培训和实战经验的积累。
总结静态拉伸法弹性模量测量实验需要进行多方面的调整和误差分析,以确保实验数据的准确性。
静态拉伸法测量金属丝杨氏弹性模量实验结果的偏差分析
- 14. 0
- 13. 8
- 13. 9
0. 2
6 7. 000
- 5. 7
- 4. 9
- 5. 3
0. 8
7 8. 000
3. 0
3. 0
3. 0
0
表 2 每增加 4. 000kg ( = 39. 2 N) 拉力时 标尺读数之差( 实验一)
增重时δn′ 减重时δn″ 平均δn
δn40 = n4 - n0/ mm δn51 = n5 - n1/ mm δn62 = n6 - n2/ mm δn73 = n7 - n3/ mm
对应的标尺读数 n′0 , 逐个增加砝码分别记下对应
的标尺读数 n′i ( i = 1 ,2 , …,7) , 依次递减砝码分别
记下对应的标尺读数 n″i ( i = 7 , 6 , …, 0) ;相同砝码
数时的数据求平均得 ni ( i = 0 , 1 , …, 7) , 再采用逐
差法处理 ni 即得金属丝受拉力 4. 000kg 作用下
4 5. 000
24. 9
25. 1
25. 0
0. 2
5 6. 000
33. 5
33. 7
33. 6
0. 2
6 7. 000
41. 9
42. 0
41. 95
0. 1
7 8. 000
50. 2
50. 2
50. 2
0
表 6 每增加 4. 000kg ( = 39. 2 N) 拉力时 标尺读数之差( 改进二)
增重时δn′ 减重时δn″
34. 6
33. 6
34. 2
33. 2
34. 2
32. 3
金属丝弹性模量的测量方法研究

2.212
表3材料的弹性模量(纯能量法)
பைடு நூலகம்
!!垒!!! 兰!兰!!!!巴竺璺竺!竺!竺!竺!!!!!竺!l£竺!!!竺!!曼芝竺!!皇竺璺2.
… Material
1撑NiTi 57.577
2撑NiTi 49.837
3撑NiTi 47.258
伊Ti 76.596
Stainless.Steel 145.644
l 34.829
modulus 29.983 35.757 28.447 53.06l
141.683
/GPa
29.226 27.554 27.165 52.271
134.829
30.553
1 34.829
Average/GPa 29.008
Stdev
.1.23l
33.283 30.814
3.768
3.118
表2材料的弹性模量(纳米压入法)
ThbIe 2 Elastic modulus of materiaI(nanoindeⅡtation method)
Material
1}INiTi 2挣NiTi 3撑NiTi 口一Ti Stainless.Steel
~ .
70.333 60.67 54.725 76.503
名义硬度鼯Pm从k;通过积分纳米压入仪测定的加、
卸载曲线可分别计算压入总功(叨和卸载功(矾)。其他
参数含义详见文献[7】。把它们代入上式就可求出综合
弹性模量丘。最后由综合杨氏模量的定义确定被测试
材料的弹性模量丢;半+上箬。在纯能量法中,
Ef
D
Ci
标定的Berkovich压头的面积.深度关系为
B
彳瓴)=c0醒+∑Cf彬2H,其中,G=23.2514;cl=
静态拉伸法测量材料的弹性模量

静态拉伸法测量材料的弹性模量实验日期 2010年11 月 29日实验目的(1)学习拉伸法测材料的弹性模量(2)了解光杠杆的结构原理,掌握使用方法(3)学习使用最小二乘法处理实验数据实验仪器弹性模量仪)(包括尺读望远镜)、千分尺(25mm,0.01mm)、游标卡尺(13cm、0.02mm)、钢卷(3m、1mm)、砝码(500g,8个)、钢丝实验原理:1测量原理在弹性限度内,应力和相关应变成正比对于长度为L的细长物体,其均截面积为A,沿长度方向寿拉力F时伸长为△L,根据胡克定律有F/A=E*△L/LF/A为作用在单位面积上的力,称为应力;△L/L为单位长度上的形变为应变;比例系数E称为裁量的弹性模量,单位是N/2用光杠杆噶测钢丝伸长量△L的装置原理改变砝码,设两夹头之间钢丝长度变化量为△L,放在园挂R上的脚a也有△L的变化,于是光杆杠上的反射镜改变θ角,设钢丝长度变化前,望远镜中叉丝对准尺上的位置为x0;平面反射镜转动后,根据光的反射定律,镜面转动θ,反射线将转动2θ角,此时望远镜中叉丝将对准新位置x设光杠杆M上的反射镜到尺的距离为D,光杠杆前后支脚间的垂直距离为l,因为θ很小,则2θ=tan2θ=x-x0/D,又θ=△L/L 故△L=l(x-x0)/2D测量出l和D,由望远镜中读出x0和x,即可算出△L从而求出E=2DL/Al*F/(x-x0)由于A=/4*(d为金属丝的直径),F=mg(m为金属丝上所加砝码的质量,g为重力加速度,故而上式应为E=*实验内容与测量(1)调整仪器的装置1)调节反射镜使得米尺的反射像在望远镜中2)从望远镜中观察,调节视度圈看清望远镜中的十字叉丝;调节聚焦手轮直至米尺的像清晰为止砝码钩上加4000g砝码,记下望远镜中读书x7,然后依次减少砝码(每次减少500g),并记下相应的读数x6,x5,……3)用米尺测量L、D的长度4)用千分尺测量钢丝的直径d,在不同位置测量,共测量6次,5)取下光杠杆,让它的三支脚在平铺的白纸上扎三个小孔,用游标、卡尺测出l 的长度钢丝伸长与外力的关系序号砝码/g 望远镜中的读数xi/cm △xi=xi-x0(cm)/cm减重加重平均值1234567钢丝的直径数据表千分尺初读数d0= cm测量次数 1 2 3 4 5 6末读数/cm直径d=-d0//cm。
(精编资料推荐)静态拉伸法测弹性模量实验报告
(精编资料推荐)静态拉伸法测弹性模量实验报告实验目的:1、通过静态拉伸法,了解材料的弹性变形规律。
2、计算得出材料的弹性模量。
3、观察不同材料的弹性特性,并对比分析。
实验原理:静态拉伸法是一种常用的测量材料弹性特性的方法。
在实验中,将材料置于弹簧式试验机的两次夹持下进行拉伸,测得不同应变下的应力值,并通过计算得到材料的弹性模量。
对于弹簧式试验机,其中一次夹持固定,另一次夹持固定的位置随着驱动螺杆的转动而移动,从而实现对材料的拉伸。
实验中需要通过手动控制驱动螺杆的转动速度,控制材料的拉伸速度。
实验流程:1、将试样置于弹簧式试验机的两次夹持之间,确保试样处于水平状态,并使试样的长度与试验机夹持距离相等。
2、打开试验机电源,并将驱动螺杆手动调至初始位置;3、选择初始拉伸速度,并开始拉伸;4、在不同拉伸位移下,记录试样的应变和应力,以及拉伸位移量;5、计算得到试样在不同应变下的应力值和弹性模量,并绘制应力-应变曲线;6、反复进行以上步骤,直至得到稳定的实验数据。
2、将计算得到的数据绘制成应力-应变曲线,并求出曲线的斜率,即为材料的弹性模量。
实验结果:通过实验得到的数据,绘制出不同材料的应力-应变曲线,并计算得到各材料的弹性模量。
经对比分析发现,聚酰亚胺材料具有较高的弹性模量,而橡胶等橡胶类材料则具有较低的弹性模量。
这些结果与预期相符。
结论:本次实验通过静态拉伸法测量了不同材料的弹性模量,得到相应的应力-应变曲线,并对比分析了不同材料的弹性特性。
实验结果表明,不同材料具有不同的弹性特性,这可以为工程设计提供重要的参考。
用静态拉伸法测金属丝的杨氏弹性模量

用静态拉伸法测金属丝的杨氏弹性模量材料受力后发生形变。
在弹性限度内,材料的胁强与胁变(即相对形变)之比为一常数,叫弹性模量。
条形物体(如钢丝)沿纵向的弹性模量叫杨氏模量。
杨氏弹性模量是描述固体材料抵抗形变能力的重要物理量,是选定机械构件的依据之一,是工程技术中常用的参数。
测量材料的杨氏弹性模量有拉伸法、梁的弯曲法、振动法、内耗法等等,本实验采用静态拉伸法测定杨氏弹性模量。
要求掌握利用光杠杆测定微小形变(角度)的方法。
在实验方法上,通过本实验可以看到,以对称测量法消除系统误差的思路在其它类似的测量中极具普遍意义。
在实验装置上的光杠杆镜放大法,由于它的性能稳定、精度高,而且是线性放大,所以在设计各类测试仪器中得到广泛的应用。
在数据处理上,本实验采用一种常用的逐差法,这种方法在实验中经常被使用。
一、 实验目的1. 学会测量杨氏弹性模量的一种方法;2. 掌握用光杠杆法测量微小伸长量的原理;3. 学会用逐差法处理实验数据。
二、 实验仪器杨氏模量仪、光杠杆、望远镜尺组、米尺、千分尺。
三、 实验原理任何固体在外力作用下都要发生形变,当外力撤除后物体能够完全恢复原状的形变称为弹性形变。
如果加在物体上的外力过大,以致外力撤除后,物体不能完全恢复原状而留下剩余形变,称为塑性形变(或范性形变)。
本实验只研究弹性形变。
因此所加外力不宜过大。
最简单的形变是棒状物体受外力后的伸长或缩短。
设钢丝截面积为S ,长为L 。
今沿长度方向施以外力F 使棒伸长△L 。
则比值F /S 是单位截面上的作用力,称为应力(胁强);比值△L /L 是物体的相对伸长量,称为应变(胁变),它表示物体形变的大小。
根据胡克定律,在物体的弹性限度内,应力与应变成正比,即L L Y S F ∆•= (1)式中比例系数Y 的大小,只取决于材料本身的性质,与外力F 、物体原长L 及截面积S 的大小无关,叫做材料的杨氏弹性模量。
在材料工程中,它是一个重要的物理量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用光杠杆放大法测定金属丝的杨氏模量一、 前言杨氏模量是工程材料重要参数,它反映了材料弹性形变与内应力的关系,它只与材料性质有关,是选择工程材料的重要依据之一。
设长为L,截面积为S 的均匀金属丝,在两端以外力F 相拉后,伸长ΔL。
实验表明,在弹性范围内,单位面积上的垂直作用力F/S(正应力)与金属丝的相对伸长ΔL/L(线应变)成正比,其比例系数就称为杨氏模量,用Y 表示,即//F S FLY L L S L==∆∆ (1) 这里的F、L 和S 都易于测量,ΔL 属微小变量,我们将用光杠杆放大法测量。
放大法是一种应用十分广泛的测量技术。
我们将在本课程中接触到机械放大、光放大、电子放大等测量术。
如螺旋测微计是通过机械放大而提高测量精度的,示波器是通过将电子信号放大后进行观测的。
本实验采用的光杠杆法是属光放大技术。
光杠杆放大原理被广泛地用于许多高灵敏度仪表中,如光电反射式检流计、冲击电流计等。
放大法的核心是将微小变化量输入一“放大器”,经放大后再作精确测量。
设微小变化量用ΔL 表示,放大后的测量值为N,我们称N A L=∆ 为放大器的放大倍数。
原则上A 越大,越有利于测量,但往往会引起信号失真。
研究保真技术已成为测量技术的一个专门领域。
二、 实验目的:1、 学会测量杨氏弹性模量的一种方法2、 掌握光杠杆放大法测量微小长度的原理3、 学会用逐差法处理数据三、 实验原理本实验的整套装置由“数显气(液)压加力杨氏模量拉伸仪”和“新型光杠杆”组成。
数显气(液)压加力杨氏模量拉伸仪如图1所示,金属丝上下两端用钻头夹具夹紧,上端固定于双立柱的横梁上,下端钻头卡的连接拉杆穿过固定平台中间的套孔与拉力传感器相连。
加力装置施力给传感器,从而拉伸金属丝。
所施力大小由电子数字显示系统显示在液晶显示屏上。
加力大小由液压调节阀改变。
数显液晶屏1. 测量杨氏弹性模量的原理公式设金属丝的直径d,将24d S π=带入式(1):24FLY d Lπ=∆ (2)2. 光杠杆放大原理:图2(a)为新型光杠杆的结构示意图。
在等腰三角形铁板1的三个角上,各有一个尖头螺钉,底边连线上的两个螺钉B 和C 称为前足尖,顶点上的螺钉A 称为后足尖,2为光杠杆倾角调节架,3为光杠杆反射镜。
调节架可使反射镜作水平转动和俯仰角调节。
测量标尺在反射镜的侧面并与反射镜在同一平面上,如图2(b)所示。
测量时两个前足尖放在杨氏模量测定仪的固定平台上,后足尖则放在待测金属丝的测量端面上,该测量端面就是与金属丝下端夹头相固定连接的水平托板。
当金属丝受力后,产生微小伸长,后足尖便随测量端面一起作微小移动,并使光杠杆绕前足尖转动一微小角度,从而带动光杠杆反射镜转动相应的微小角度,这样标尺的像在光杠杆反射镜和调节反射镜之间反射,便把这一微小角位移放大成较大的线位移。
这就是光杠杆产生光放大的基本原理。
下面我们来导出本实验的测量原理公式。
图3(a)为NKY-2型光杠杆放大原理示意图;标尺和观察者在两侧,如见图3(b)所示。
开始时光杠杆反射镜与标尺在同一平面,在望远镜上读到的标尺读数为0p ,当光杠杆反射镜的后足尖下降△L 时,产生一个微小偏转角θ,在望远镜上读到的标尺读数1p ,10P P -即为放大后的钢丝伸长量N,常称作视伸长。
由图可知θθb b L ≈=∆tanθθD D P P N 44tan 01≈=-=图2(b) 标尺图3(b )图3(a )所以它的放大倍数为1004PP N D A L L b-===∆∆ 带入式(2)可得: 216FLD Y d bNπ= (3) 式中b 称为光杠杆常数或光杠杆腿长,为光杠杆后足尖A 到两前足尖BC 连线的垂直距离,如图4(a)所示D 为反射平面镜到标尺的距离,可用光学方法在望远镜中间接测得。
调节望远镜的目镜,聚焦后可清晰地看到叉丝平面上有上、中、下三条平行基准线,如图4(b)所示,其中间基准线称为测量准线,用于读金属丝长度变化的测量值12,n n ,上下两条准线称为辅助准线。
它们之间的距离a n -b n 称为视距,则有1003D =⨯视距四、 系统误差分析与消减办法1、 由于钢丝不直或钻头夹具夹得不紧将出现假伸长,为此,必须用力将钻头卡夹紧钢丝。
同时,在测量前应将金属丝拉直并施加适当的预拉力。
2、 由于钢丝在加外力后,要经过一段时间才能达到稳定的伸长量,这种现象称为滞后效应,这段时间称为驰豫时间。
为此每次加力后应等到显示器数据稳定后再进行测读数据。
3、 金属丝(钢丝)锈蚀或长期受力产生所谓金属疲劳,将导致应力集中或非弹性形变,因此,当发生钢丝锈蚀或使用2年以上应作更换 。
4、 测力秤的误差,本实验所用的数字测力秤的示值误差为+10g。
5、 关于其他测量量的误差分析与估算(1) 由于测量条件的限制,L,D,b 三个量只作单次测量,它们的误差限应根据具体情况估算。
其中L,D 用钢尺测量时,其极限误差可估算为1~3mm。
测量光杠杆常数b 的方法是,将三个足尖压印在硬纸板上,作等腰三角形,从后足尖至两前足尖连线的垂直距离即为b。
由于压印,作图连线宽度可达0.2~0.3mm,故其误差限可估算为0.5mm。
(2) 金属丝直径d 用千分尺多次测量时,应注意测点要均匀地分布在上、中、下不同位置,千分尺的仪器误差取0.004mm。
五、 实验内容与仪器配置内容:测定钢丝的杨氏模量。
仪器:数显气(液)压加力杨氏模量测定仪,新型光杠杆,螺旋测微计,钢卷尺、游标卡尺各一个。
六、 实验步骤与操作要点1、 观察杨氏模量测定仪上的圆形水准器的水泡是否居中,若不居中可调节底脚螺丝直至水准泡居中为止,此时意味着杨氏模量仪的立柱铅直,平台水平。
2、 将液压连接管头插入拉伸仪接口,并拧紧压紧螺帽(一般实验室已经连接好)。
使液压调节螺C 图4(a )图4(b )杆沿减力方向调至“零位”(注意:顺时针转动螺杆为加力方向,反时针转动为减力方向)。
3、 将照明标尺插入拉伸仪平台左边的小柱内,再将照明线接头插入拉伸仪左侧照明电源接口。
(一般实验室已经连接好)4、调节光路(1)将光杠杆放置好,两前足尖放在平台槽内,后足尖置于与钢丝固定的圆形托盘上,并使光杠杆反射镜平面与照明标尺基本在一个平面上。
调节光杠杆平面镜的倾角螺钉,使平面镜与平台面基本垂直。
(2)调节望远镜与调节反射镜高度,使其与光杠杆基本处于等高位置。
调节反射镜的倾角螺丝,使反射镜镜面与光杠杆镜面基本平行。
(3)小心转动调节反射镜,至目测能看到照明标尺经调节反射镜投射到光杠杆反射镜的像为止。
(4)通过望远镜找到标尺的像;若找不到,应调节光杠杆和反射镜倾角螺钉以及望远镜的位置。
直至找到为止5、 调节望远镜的目镜焦距看清叉丝平面的三条准线。
调节物镜焦距清晰起地看清反射回的标尺像并无视差。
6、 测量。
(1) 按下数显测力秤的“开/关”键。
待显示器出现“0.000”后,用液压加力盒的调节螺杆加力,显示屏上会出现所施拉力。
(2) 为测量数据准确方便,先测量加载过程,将数显拉力从14Kg 始,每间隔1Kg 记录标尺读数10组数据,分别记作013456789,,,,,,,,n n n n n n n n n 。
隔数分钟后,连续减载,每减少1kg观测一次标尺读数。
读取相应的十组数据,填入记录表格中。
(3) 重复上述步骤(2)重做一遍。
(4) 观测完毕应调节液压调节螺杆旋至最外,使测力秤指示“0.000”附近后,再关掉测力秤“电源”。
(5) 测量D,L,b,d 值,其中D,L,b 只测一次,d 用千分尺在金属丝的不同位置测6次,记入自行设计表格中。
7、 操作要点:调节好光路是本实验的基础,为此必须充分理解光杠杆的放大原理。
调节标尺-反射平面镜-望远镜光路系统,使标尺在平面镜中的反射像能进入望远镜;调节望远镜的目镜和物镜焦距,确保在望远镜中能清晰且无视差地看到叉丝平面的三条准线和标尺像的刻度线。
弄清光杠杆和调节反射镜调节俯仰角的方法,操作时动作要轻,要精细准确。
七、 实验记录与数据处理次数 1 2 3 4 5 6 平均)(mm d0.796 0.797 0.798 0.796 0.797 0.795 0.7965mm L 3396±=, mm b 02.082.84±=cm n n D b a 12285.151.531003100=-⨯=-=, cm D 2122±=2、数据处理: ①求dd 的A 类不确定度:mm d dd i id A 0010.016)()(612=--==∆∑=σd 的B 类不确定度:mm INS 004.0=∆合成不确定度:=∆+∆=22B A d U mm 004.0)004.0()0010.0(22=+mm U d d 004.0796.0±=± ②求FN F 01.498011.9000.5=⨯=N g U B F 10.08011.9010.0=⨯=⋅∆= N U F F 10.001.49±=±③求Ncm N N N i i N A 019.015)()(512=--==∆∑=σcm N INS B 07.005.022)(=⨯=∆=∆=∆+∆=22B A N U cm 07.0)07.0()019.0(22=+mm U N N 07.047.1±=±④求E()2522/1053.147.182.84796.0142.312239601.491616mm N bN d FLD E ⨯=⨯⨯⨯⨯⨯⨯==π 2222224)(⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=N U b U d U D U L U F U E U N b d D L F r%547.107.082.8402.0796.0004.0412********.4910.0222222=⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=()255/1008.0%51053.1mm N E U E U r E ⨯=⨯⨯=⋅= E 的测量结果:()⎪⎩⎪⎨⎧=⨯=⨯±=±%5%100)(/1008.053.125E U E U mm N U E E r E ⑤求放大倍数0A5.57482.8122440=⨯==bD A八、 思考题1、 杨氏模量测量数据N 若不用逐差法而用作图法处理,请想一想如何处理?2、 根据误差分析,要使Y 的实验结果理想,关键应抓住什么量进行测量?为什么?为什么不同的长度量(共几个)要用不同仪器进行测量(有哪几种)?3、 用光杠杆放大法测量微小长度变化有什么优点?怎样提高光杠杆放大系统的放大倍数?4、 试证明:若测量前光杠杆反射镜与调节反射镜不平行,不会影响测量结果。