第7章Simulink仿真
第7章 Simulink的基础应用
第2节 Simulink的操作方法
2.1 Simulink的运行操作
1、运行Simulink的方法 在MATLAB的命令窗口直接键入“simulink”; 利用MATLAB工具条上的Simulink快捷键图标; 在MATLAB菜单中,选择“File-New-Model” 2、打开已存在的模型文件 在MATLAB主窗口中直接键入文件名(不加扩展 名); 在MATLAB菜单中,选择“File-Open-Model” 利用MATLAB工具条上的“打开”图标。
9
第3节 仿真模型的搭建方法与步骤
3.1 构建SIMULINK仿真系统模型 1.打开一个SIMULINK仿真模型窗口。
2.构建一个SIMULINK仿真模型。
3.运行SIMULINK仿真模型 构建好一个系统的模型之后,接下来的事情就是运 行模型,得出仿真结果。运行一个仿真的完整过程 分成三个步骤:设置仿真参数,启动仿真和仿真结
11
3.3 启动仿真启动仿真
设置仿真参数和选择解法器后,可以启动仿真运行。 选择菜单下start选项来启动仿真,如果模型中有些 参数没有定义,则会出现错误信息提示框。否则开始 仿真运行,结束时系统会发出一鸣叫声。
12
【例7-1】观察信号发生器输出波形 具体操作步骤如下: (1)进入SIMULINK,打开一个空白的模型窗口。 (2)打开SIMULINK的Sources模块库,选择Signal Generator(信号发生器)。 (3)打开SIMULINK的Sinks模块库,选择Scope(示波器) 。 (4)连接Signal Generator(信号发生器)模块和Scope(示 波器)模块。
7
5、改变模块大小 用鼠标拖曳模块四周的黑点。 6、模块重新命名 用鼠标单击模块名称即可。 7、改变模块及窗口颜色 使用Format菜单的Foreground Color指令或者 Screen Color 指令。 8、设定模块参数 利用鼠标左键双击模块图标。 9、设定模块属性 选中模块→右键点击Block Properties。 10、设定模块输入、输出信号 模块处理的信号包括标量信号和向量信号。
matlab simulink 控制系统仿真 书籍
Matlab/simulink 书籍选择Simulink与信号处理(光盘1张)这本书的一个重要特征是在讨论Simulink的工作原理、Simulink的基本模块库以及用Simulink建立信号处理系统模型时采用了大量实例,提供了近100个Simulink模型文件。
这些建模实例建立在MA TLAB/Simulink的R2 009a的版本之上,并逐个进行了测试。
它们是学习Simulink软件,掌握模块特征和应用场合,进而建立复杂信号处理系统模型的重要参考资料。
本书的另一个重要特征是涉及面广,取材新颖、实用。
本书是学习和使用Simulink对信号处理系统进行模拟和仿真的参考书籍,是笔者对多年来在MathWorks工作期间与公司软件开发人员及众多用户交流、切磋获得的经验、体会的总结和提炼。
全书共8章,介绍了Simulink 的基本知识和Simulink的扩展之一——信号处理模块集,并按照一般信号处理系统的组成方式和信号流程介绍如何用Simulink建立系统模型——包括信号的产生,信号的滤波,信号的统计参数与信号估计,以及如何在S imulink系统模型中实现复杂的数字信号处理算法。
MATLAB/Simu link与控制系统仿真(第2版)本书从应用角度出发,系统地介绍了MATLAB/Simulink及其在自动控制中的应用。
通过典型样例,全面阐述了自动控制的基本原理、系统分类以及控制系统分析与设计的主要方法。
本书从应用角度出发,系统地介绍了MATLAB/Simulink及其在自动控制中的应用。
结合MA TLAB/Simulin k的使用,通过典型实例,全面阐述了自动控制的基本原理以及控制系统分析与设计的主要方法。
全书共分13章,包括自动控制系统与仿真基础知识、MA TLAB计算及仿真基础、Simulink仿真基础、控制系统数学模型、时域分析法、根轨迹分析法、频域分析法、控制系统校正与综合、线性系统状态空间分析、线性系统状态空间设计、非线性系统、离散控制系统、最优控制等。
Simulink建模仿真实例详解

K
Out1
In1
In1 Out1 In2
crtanim2 Animation function
Feedback gain using LQR design.
State estimator
Inputs & Sensors
Inputs & Sensors1 Double Mass-Spring System (Double click on the "?" for more info) To start and stop the simulation, use the "Start/Stop" selection in the "Simulation" pull-down menu ?
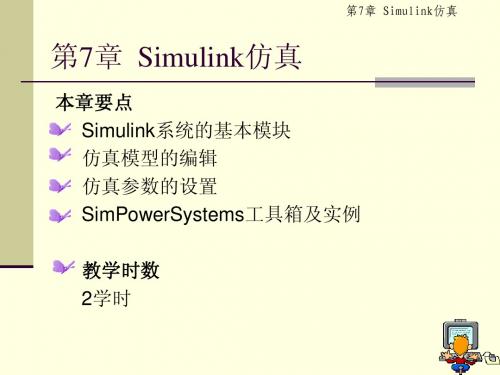
1.3.3 Simulink 应用举例
(原教材P6例子)
在Matlab命令窗口中输入 dblcart1 右图所示的模型用来 模拟双质量-弹簧系 统在光滑平面上受一 个周期力情况下的运 动状态,其中周期力 只作用在左边的质量 块上。 F(t)
x' = Ax+Bu y = Cx+Du Plant
Demux Actual Position
静态系统模型 动态系统模型 连续系统模型 代数方程 集中参数 微分方程 分布参数 偏微分方程 离散系统模型 差分方程
1.1.2 计算机仿真
1. 仿真的概念 仿真是以相似性原理、控制论、信息技术及相关领域的 有关知识为基础,以计算机和各种专用物理设备为工具,借 助系统模型对真实系统进行试验的一门综合性技术。 2. 仿真分类 ( 1 )实物仿真:又称物理仿真。是指研制某些实体模型, 使之能够重现原系统的各种状态。早期的仿真大多属 于这一类。 优点:直观,形象,至今仍然广泛应用。 缺点:投资巨大、周期长,难于改变参数,灵活性差。
第7章simulink子系统

为保持held。
第7章 技Simulink子系统术
(4) 下方使能子系统中饱和模块(Saturation),其参
数设置为:饱和上限为0.75,饱和下限为-0.75。 (5) 偏移常数信号,其参数设置分别为[2 0]与[0 2], 如图7.4中系统模型所示。 (6) 系统输出Scope模块参数设置,如图7.6所示。
第7章 技Simulink子系统术
图7.3 条件执行子系统的建立方法示意图
第7章 技Simulink子系统术
7.2.2 使能子系统
在对具体的条件执行子系统进行介绍时,采用实际 的系统模型进行说明非常有利于读者的理解。因此, 本书均以实际的系统模型为例进行说明。 所谓的使能子系统,是指只有当子系统的使能信号 输入为正时,子系统才开始执行。
(1) 对于Simulink的早期版本而言,不存在专门的
Subsystems模块库。
第7章 技Simulinபைடு நூலகம்子系统术
(2) Simulink系统模型的最高层不允许使用Enable
与Trigger信号,而仅允许在子系统中使用。 图7.3中并没有建立一个完整的动态系统的模型, 而仅仅是给出建立条件执行子系统的方法,因此并没 有给出执行系统所需的使能信号源与触发信号源(如 图7.3中椭圆曲线所示,使能输入端与触发输入端采用 不同的信号标志)。如果此时用户运行此系统进行仿 真,MATLAB命令窗口中会给出输入端口没有信号连 接的警告,而且系统的输出均为0。
第7章 技Simulink子系统术
图中左上部分为系统整体模型
图中右侧分别 为上升沿、下降 沿及双边沿触 发子系统。
simulink动态系统建模仿真 第7章
图7-6
当选择变步长算法仿真模型时,Solver options选项区 中的Zero crossing control选项可以控制是否启动过零检测, 如图7-7所示。对于大多数模型来说,当选择较大步长仿真 模型时,启动过零检测会加速仿真过程。但是,如果模型有 极大的动态变化,则关闭过零检测会加速仿真过程,但会降 低仿真结果的精确度。
表7-1列出了Simulink中具有过零的模块,每个模块的过 零类型是不同的,有的过零只是用来通知求解器的模式是否 发生了改变,另外一些过零类型则与信号有关,用来驱动其 他模块。
模块 Abs Backlash De adZo ne From Workspace Hit Crossing If
Inte gra to r
图7-7
对于模型中的某些模块,用户可以在模块的参数对话框 中不选择Enable zero crossing detection选项来关闭模块的过 零检测,并设置Zero crossing control选项为Use local settings,表示只对模型进行局部过零检测。局部过零检测 可以减少Simulink频繁地对模型进行过零检测,而模型中的 其他模块同样可以获得使用过零检测带来的高精度。
这里将Sine Wave模块中的Frequency(rad/sec)值设置为2,把 模型中的输出数据传送到MATLAB工作区,在工作区中利用 plot(tout,yout)命令绘制输出结果曲线,可得到如图7-9所示的结 果。从图中可以看到,实线是Function模块的输出,该模块未检 测到过零事件,因此输出曲线在拐点处漏掉了一些点,正弦波的 绝对值输出不完全正确;虚线是Abs模块的输出,该模块检测到 了过零事件,在MATLAB工作区中输入下列命令:
MATLAB8Simulink子系统的创建及应用

PID闭环控制仿真模型
• Math Operations模块库:2个Sum模块,进行求和运 算,Sum1 设置成2个输入。 • Sum2参数由题要求设置为3个输入,如图7-9所示。
图7-9 Sum2模块参数设置
• Math模块库:3个Gain模块:实现比例、微分和 积分的增益,参数设置如图7-10所示。 • 三个Gain模块参数设置相似,只是将 k p 、 k i 、k d 分别设置为5、10、1即可。
• 右击生成的子系统Subsystem模块,再选择 Mask subsystem命令,弹出如7-3所示的Mask Editor参数对话框,在其中可以进行各种设置。 Mask Editor参数对话框可以创建和编辑封装 子系统。Mask Editor对话框中共包括4个选项 卡:Icon、Parameters、Initialization和 Documentation。子系统的封装主要就是对这4 页参数进行设置。每个选项卡都可以定义封装 mask的一个特性。
【例7-1】 对下面的仿真模型中被选中的模块生成子系统
图7-1 系统模型图
要生成子系统首先右击选中的模块,在弹出的菜单中选择 Create Subsystem 命令,生成如图7-2所示。
图7-2 封装子系统后的模型图
7.1.2通过Subsystem模块建立子系统
操作步骤系为: 1.先打开Simulink模块库浏览器,新建一个仿真模型。 2.打开Simulink模块库中的Ports & Subsystems模块库, 将Subsystem模块添加到模型编辑窗口中。 3.双击Subsystem模块,打开一个空白的Subsystem窗 口,将要组合的模块添加到该窗口中,另外还要根据 需要添加输入模块和输出模块,表示子系统的输入端 口和输出端口,这样,一个子系统就建好了。 对于简单的模型,可以采用第一种,这种操作一般不 容易出错,能够顺利搭建模型。而对于复杂的系统, 我们事先将模型分成若干个子系统,然后再采用第二 种方法进行建模。
07-交互式仿真工具Simulink [MATLAB与控制系统仿真][张磊,任旭颖]
![07-交互式仿真工具Simulink [MATLAB与控制系统仿真][张磊,任旭颖]](https://img.taocdn.com/s3/m/6be148a5c8d376eeafaa3129.png)
例7-2-2:Random Number-生成标准分布的随机数,双击该图标后设置其参数。Mean:设置平 均值,默认值是0;Variance:方差,默认值是1(随机数与平均值之间偏差的评价值);Seed: 随机数种子,默认值是0(0-MAX),MATLAB通过种子值确定产生随机数值的算法,固定的 种子产生固定的随机数;Sample time:指定随机数样本之间的时间间隔。默认值是0.1。
Font style Foreground Color backround Color Block Shadow Show Block Name
设置模块字体 设置模块前景颜色 设置模块背景颜色 设置模板阴影 显示模块名称
转向操作(Rotate&Flip)
模块基本操作
MATLAB与控制系统仿真
7.3 Simulink建模与仿真
显示及输出 模块
(1)打开一个空白Simulink模型窗口; (2)进入Simulink浏览库界面,将功能模块由模块库窗口拖拽到模型窗口中;
Hale Waihona Puke (3)按照给定的框图修改编辑窗口中模块的参数;
(4)连接功能模块,构成所需的系统仿真模型;
(5)对仿真模型进行仿真,随时观察仿真结果,如果发现有不正确的地方,可以停止仿真,对参数进行修订;
MATLAB与控制系统仿真
7.3 Simulink建模与仿真
3.Simulink仿真参数的设置
例7-3-2.已知单位负反馈二阶系统的开环传递函数G(s),绘制单位阶跃响应的实验结构,并使用
simulink完成仿真实验。
(1)点击【New Model】,新建一个模型窗口;
G(s)
10 s2 3s
MATLAB与控制系统仿真
第7章 Simulink仿真
Matrix Gain
Math Function Trigonometric function
矩阵增益
数学运算函数 三角函数
Complex to Magnitude-Angle
Magnitude-Angle to Complex Complex to Real-Imag
复数的模和辐角
模和辐角合成函数 复数的实部和虚部 实部和虚部合成复 数 强迫输入信号为零
MinMax
Abs
求最大值
求绝对值
Real-Imag to Complex
Algebraic Constraint
Sign
符号函数
第7章 Simulink仿真
7.2 Simulink模块操作
一、模块的编辑处理
1.模块的操作 (1)添加模块 当要把一个模块添加到模型中,先在Simulink模块库中 找到它,然后直接将这个模块拖入模型窗口中即可。 (2)选取模块 当模块已经位于模型窗口中时,只要用鼠标在模块上 单击就可以选中该模块,这时模块的四角上出现一些 黑色的小方块,这些小方块就是该模块的关键点,拖 动这些黑色小方块可以改变模块的大小。
功能 零阶保持器 单位延时采样保持 离散时间积分
模块 Discrete Filter
功能 离散滤波器 离散传递函数 离散零极点
Discrete Transfer Fcn
Discrete Zero-Pole
离散状态方程
First-Order Hold
一阶保持器
第7章 Simulink仿真
8.数学运算模块(Math Operations) 数学运算模块提供了基本数学运算函数、三角函数、 复数运算函数以及矩阵运算函数。
第7章 Simulink仿真
matlabsimulink【初学教程】

第7章Simulink仿真环境Simulink是面向框图的仿真软件。
7.1演示一个Simulink的简单程序【例7.1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就能够够打开Simulink模块库阅读器(Simulink Library Browser) 窗口,如图7.1所示。
图7.1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右边子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,即可看到各类输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,那么“Sine Wave”模块就被添加到untitled 窗口;也能够用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单当选择“add to 'untitled'”命令,就能够够将“Sine Wave”模块添加到untitled 窗口,如图7.2所示。
图7.2 Simulink界面(5) 用一样的方式打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右边的输出端,当光标变成十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图7.3所示。
(7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或选择菜单“Simulink”——“Start”,那么仿真开始。
第7章SIMULINK仿真操作
Direct Lookup Table (n-D) x
2-D T(u)
Lookup Table (n-D)
xdat y ydat Lookup Table Dynamic
图7-16 查表模块库(Lookup Tables)及其功能说明
(6)User-Defined Functions模块库
u
fcn
图7-15 数学运算模块库(Math operations)及其功能说明
(5)查表模块库(Lookup Tables)
2-D T[k] cos(2*pi*u) Cosine Interpolation (n-D) Lookup Table using PreLookup u k f PreLookup Index Search Sine sin(2*pi*u) Lookup Table (2-D) 2-D T(k,f)
Product
Product of Elements
Real-Imag to Reshape Rounding Complex Function sin -u u+Ts
Slider Gain
Subtract
Sum of Trigonometric Unary Minus Weighted Elements Function Sample Time Math
7.1.1 SIMULINK的窗体介绍
由于SIMULINK是基于MATLAaB环境之上的 高性能系统及仿真平台。 因此,必须首先运行MATLAB,然后才能启 动SIMULINK并建立系统的仿真模型。
图7-1 两种启动SIMULINK方法的图示说明
图7-2 Simulink库浏览器窗口
7.1.2 一个MATLAB/SIMULINK库自带的 演示实例
工程系统建模与仿真

第7章 工程系统建模与仿真
更复杂的工程系统当然可以从底层建模, 但非专业人士很难建模,可以采用现成专 业工具直接建模仿真 建模方便、仿真结果可靠 主要内容
物理系统建模仿真模块集Simscape简介 电气系统模块集简介 电子线路及其仿真 电机与拖动系统仿真 机械系统建模与仿真
Friday, 2010-10- 8, 07:11:15 第7章:工程系统建模与仿真 薛定宇、陈阳泉《基于MATLAB/Simulink的系统仿真技术与应用》清华大学出版社2010
PS-Simulink Converter Simulink-PS Converter
仿真参数设置模块、双向连接模块和连接 端口模块
Friday, 2010-10- 8, 07:11:15 第7章:工程系统建模与仿真 薛定宇、陈阳泉《基于MATLAB/Simulink的系统仿真技术与应用》清华大学出版社2010
Simscape语言描述的模型步骤
引导语句:由component、domain关键词引导 对话框参数定义语句:用parameters模块定义该模块 对话框变量参数和物理量单位,要求用户输入这4 个参数及其单位。 变量声明语句:由variables关键词引导 初始设置与参数验证子函数:function setup首先检 测输入的变量值是不是正数,如果不是则给出错误 信息。 模型方程定义:由equations引导,描述数学方程
电路建模与仿真
电路图 Simulink模型 c7mele1.mdl 数值解和解析解 的比较
Friday, 2010-10- 8, 07:11:15
第7章:工程系统建模与仿真 薛定宇、陈阳泉《基于MATLAB/Simulink的系统仿真技术与应用》清华大学出版社2010
Simulink的应用

第 7 章 Simulink的应用
7.3.3 函数与表格模块库(Function & Table)
函数与表格模块库(Function & Table)主要实现各种一维、二维或者更高维函数的 查表,另外用户还可以根据自己需要创建更复杂的函数。该模块库包括多个主要模块、 如图7.7所示。
第 7 章 Simulink的应用
特殊数学模块中包括求最大最小值模块(MinMax)、取绝对值模块(Abs)、符号函 数模块(Sign)、取整数函数模块(Rounding Function)等。
8. 数字逻辑函数模块 数字逻辑函数模块包括复合逻辑模块(Combinational Logic)、逻辑运算符模块
(Logical Operator)、位逻辑运算符模块(Bitwise Logical Operator)等。 9. 关系运算模块(Relational Operator) 关系符号包括:==(等于)、≠(不等于)、<(小于)、<=(小于等于)、>(大于)、>=(大
1. 一维查表模块(Look-Up Table) 一维查表模块(Look-Up Table)实现对单路输入信号的查表和线性插值。
2.二维查表模块(Look-Up Table 2-D) 功能:根据给定的二维平面网格上的高度值,把输入的两个变量经过查表、插值,
计算出模块的输出值,并返回这个值。
说明:对二维输入信号进行分段线性变换。
simulink的应用simulink71simulink工作平台的启动72simulink仿真原理73simulink模块库74仿真模型的建立和模块参数及属性的设置75其他应用模块集及simulink扩展库simulink的应用71simulink工作平台启动simulink通常有两种方法
matlab Simulink仿真

Math Operations数学模块 Abs:求绝对值 Add:求和 Algebraic Constraint:代数约束 Sum:加减运算 Product:乘运算 Divide:除运算 Dot Product:点乘运算 Gain:比例运算
25
Math Function :包括指数函数、对数函数、求 平方、开根号等常用数学函数 Trigonometric Function:三角函数,包括正弦、 余弦、正切等 MinMax:最值运算 Sign:符号函数 Complex to Magnitude-Angle:由复数输入转为 幅值和相角输出 Magnitude-Angle to Complex:由幅值和相角输 入合成复数输出 Complex to Real-Imag:由复数输入转为实部和 虚部输出 Real-Imag to Complex:由实部和虚部输入合成 复数输出
28Biblioteka Sources 输入源模块
Band-Limited White Noise:限带白噪声 Chirp Signal:啁啾信号 Clock:时钟信号。 Constant:常数信号。 Ground:接地 In1:输入端。
这个通用库包含Simulink仿真常用的基本 模块,本章建模所需的模块大部分在 此库中
16
图7-4 Simulink 通用模块库包含的子库情 况
17
Simulink 通用模块库的子库简介如下: Commonly Used Blocks通用模块 Bus Creator输入信号合并成向量信号 Bus Selector输入向量分解成多个信号 Creator输出信号 Constant输出常量信号 Data Type Conversion数据类型转换 Demux输入向量转换成标量
从入门到精通教程第章Simulink仿真环境
7.2 Simulink的工作环境
在MATLAB的命令 窗口输入“simulink” ,或单击工具栏中的 图标,就可以打开 Simulink模块库浏览 器(Simulink Library Browser)窗口。
7.2.1 一个简单的Simulink实例
例7-1 将一个阶跃输入信号送到积分环节 ,并将积分后的信号送到示波器显示。 1. 创建空白模型 2. 添加模块 3. 添加连接 4. 仿真 5. 保存模型
9. 模块的属性设置 (1)“General”选项卡 (3)调用函数(Callbacks) (2)“Block Annotation”选项卡
7.4 Simulink在控制系统中的应用实例
例7-8 创建一个Simulink模型使用PID控 制器控制三阶系统,查看其输出响应。
练习
7.5子系统与封装 7.5.1 创建子系统
2. 触发子系统 触发子系统是指当触发事件发生时开始执 行子系统。与使能子系统相类似,触发子系 统的建立要把Signals & Systems模块库中 的Trigger模块拷贝到子系统中。
例 利用触发子系统原理将一锯齿波转换成方波。 操作步骤如下: (1)用Signal Generator、Subsystem和Scope模块构成 一子系统,双击Signal Generator模块图标在Wave from 的下拉列表框中选择sawtooth,即锯齿波。 (2)将上例中的Enable模块换成Trigger触发模块。双击 该模块并选Trigger type触发事件形式为either,即上跳沿 或下跳触发。 (3)完成新建模型窗口中各模块间的连接,并存盘。 (4)双击示波器模块,然后选择Simulink菜单中的start命 令,就可看到方波。
《MATLAB Simulink与控制系统仿真(第4版)》的课件 第7章 频域分析法
极坐标图(Nyquist图)
7.3.2 对数坐标图(Bode图)
Bode图的优点可概括如下: (1)将幅值相乘化为对数相加运算,大大简化了系统频率特性 的绘制工作。 (2)由于横轴采用了对数分度,缩小了比例尺,从而扩大了频 率视野,可以在较大的频段范围内表示系统频率特性。在一张 Bode图上,既画出了频率特性的中、高频段,又能清楚地画出其 低频段,在分析和设计系统时,低频段特性也是非常重要的。 (3)可以绘制渐近的对数幅频特性;也可以制作标准样板,画 出精确的对数频率特性。
第7章 频域分析法
7.1 引言 7.2 频率特性基本概念 7.3 频率特性的表示方法 7.4 系统开环频率特性作图 7.5 频率响应分析 7.6 MATLAB在频率法中的应用 7.7 频率法的稳定性分析 7.8 综合实例及MATLAB/SIMULINK应用 习题
内容提要
控制系统的频率特性反映的是系统对正弦输入信号的 响应性能。频域分析法是一种图解分析法,它依据系 统频率特性对系统的性能(如稳定性、快速性和准确 性)进行分析。
频域分析法的突出优点是可以通过试验直接求得频率 特性来分析系统的品质,应用频率特性分析系统可以 得出定性和定量的结论,并具有明显的物理含义。
对数幅相图(Nichols图)
7.3.3 对数幅相图(Nichols图)
对数幅相图也称Nichols图,它是将对数幅频特性和相频特性两张图在角频率 为参变量的情况下合成为一张图。
Simulink的应用有各模块介绍
i
xip
Simulink的应用
7.1 Simulink工作平台
启动Simulink,通常有两种方法: (1)在MATLAB命令窗口中直接输入Simulink命令;
(2)在MATLAB工具栏上单击Simulink按钮,如图7.1所示。
图7.1 启动Simulink
这样就可打开了Simulink的Simulink Library Brower(库模块浏览器),如图7.2所示。 在菜单栏中执行File/New/Model命令,就建立了一个名为untitled的模型窗口,如图7.3 所示。在建立了空的模块窗口后,用户可以在此窗口中创建自己需要的Simulink模型。
第 7 章 Simulink的应用
第7章 Simulink的应用
7.1 Simulink工作平台的启动 7.2 Simulink仿真原理 7.3 Simulink模块库 7.4 仿真模型的建立和模块参数及属性的设置 7.5 其他应用模块集及Simulink扩展库
p
第 7 章
x p
第 7 章 Simulink的应用
图7.2库模块浏览器
图7.3 新建的空白模块窗口
第 7 章 Simulink的应用
7.2 Simulink的仿真原理
7.2.1 Simulink仿真模块
通常,Simulink仿真系统包括输入(Input)、状态(states)和输出(Output)三个部分。
·输入模块:即信号源模块,包括常数字信号源和用户自定义信号; ·状态模块:即被模拟的系统模块,是系统建模的核心和主要部分; ·输出模块:即信号显示模块,它能够以图形方式、文件格式进行显示。 注意:在设计一个模型时,必须先确定这三个部分的意,以及它们之间的联系; Simulink的仿真模型并非一定要完全包括这三个部分,它可以缺少其中一个或者两个; Simulink的状态模块可以是连续的、离散的,或者它们二者的结合。