catia人机工程分析教程
CATIA人机分析模块

CATIA人机工程模块• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析人体模型建立完成后,修改设置人体模型的显示属性• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析四肢及头部摆(转)动角度界限 动画视角接 合:可接合人体模型的6对部位(肩部、大臂、前臂、大腿、小腿、踝部)改变其活动范围;角度界限:显示隐藏角度界限;动画视角:在某一自由度上放大显示所选择的部位,提供最佳视角。
应用放置功能以参考点为基准移动,点选无先后顺序标准姿态:主要用于蹲坐、弯腰、扭曲、倾斜以及肘部的调整等姿态• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析人体模型属性编辑改变身体某个部位的姿势(摸索)可以在人体的7个部位上建立移动坐标坐标系方向与CATIA 坐标系一致坐标系方向根据人体关节确定肢体的精确定位(出击)坐标系方向可变坐标系方向不变人体模型姿势、复制重置与交换右键人体模型视野功能• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析碰撞检查绑定与解除绑定:对于product应在结构树中选取,否侧应多次绑定解除一解除二回位定义偏移量偏移命令用于重新定义定位模式的动作,定位模式的默认动作中心点是身体部位的“末端”点,在某些定位中可通过重新定义中心点,简化操作过程。
上肢伸展域人体上肢的伸展域往往决定工作空间的世界一级工作空间内设备等物体的位置和设备的结构的设计。
注意:只能选择手或手指人体模型的约束应用人体模型的约束功能,可以使人体模型在IK模式中,精确地达到用户要求的姿态。
CATIA_V5人机培训应用
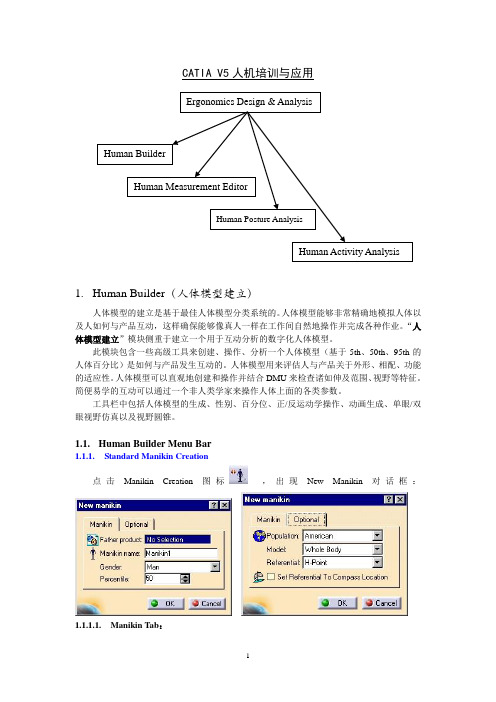
CATIA V5人机培训与应用1.Human Builder(人体模型建立)人体模型的建立是基于最佳人体模型分类系统的。
人体模型能够非常精确地模拟人体以及人如何与产品互动,这样确保能够像真人一样在工作间自然地操作并完成各种作业。
“人体模型建立”模块侧重于建立一个用于互动分析的数字化人体模型。
此模块包含一些高级工具来创建、操作、分析一个人体模型(基于5th、50th、95th的人体百分比)是如何与产品发生互动的。
人体模型用来评估人与产品关于外形、相配、功能的适应性。
人体模型可以直观地创建和操作并结合DMU来检查诸如伸及范围、视野等特征。
简便易学的互动可以通过一个非人类学家来操作人体上面的各类参数。
工具栏中包括人体模型的生成、性别、百分位、正/反运动学操作、动画生成、单眼/双眼视野仿真以及视野圆锥。
1.1.Human Builder Menu Bar1.1.1.Standard Manikin Creation点击Manikin Creation图标,出现New Manikin对话框:1.1.1.1.Manikin Tab:Father Product:人体模型必须附加在左边树形图的一个Product内,这个Product可以是任何级别的,但不可以是其他任何人体模型。
Manikin name: 在这里为新建的人体模型命名,如:驾驶员、乘客、机械工等。
多个人体模型可以有同一个名字,如果将这栏空白,系统默认命名为Manikin1 (2, 3, etc.),并且保存为Manikin1.CATProduct。
Gender: 在这里选择人体模型的性别。
Percentile: 可以选择从1%至99%的人体百分位。
1.1.1.2.Optional TabPopulation:这里选择人体模型的国籍,系统默认有:美国、加拿大、法国、日本、韩国。
Model: 这里选择希望得到的人体模型的类别,系统提供三种:全身、只有左臂、只有右臂。
CATIA人机工程模块讲义(专业培训公司教程)

资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
Copyright DASSAULT SYSTEMES
资料仅供参考
附录1运用catia进行人因工程学设计

医疗设备设计
总结词
CATIA在医疗设备设计中考虑了人机交互和 人体工程学的要求,提高了设备的易用性和 安全性。
详细描述
医疗设备设计需要特别关注人机交互和人体 工程学的要求,以确保设备易于使用且安全 可靠。CATIA软件可以帮助设计师创建精确 的设备模型,并进行人机工程学分析和优化 。通过模拟医护人员在使用设备时的操作过 程和人体受力分布,可以优化设备的形状、 尺寸和结构,提高设备的易用性和安全性。
重要性
随着工业和科技的不断发展,人机交 互越来越频繁,人因工程学在提高生 产效率、保障人类安全和健康方面具 有重要意义。
人因工程学的研究领域与应用
研究领域
包括人体测量、人体力学、认知心理学、环境心理学等方面 的研究。
应用领域
广泛应用于汽车、航空、家电、家具、医疗器械等行业,涉 及产品设计、工作环境设计、人机界面设计等方面。
根据不同使用者的身体尺寸和特征,可以定制化设计产品,以满足不同使用者 的需求,提高产品的适用性和舒适性。
人体姿态与活动的考虑
姿态分析
在设计过程中,应对使用者的姿态进行分析,了解使用者在操作过程中的身体姿 态和活动范围,以确保产品符合使用者的姿态需求。
活动空间
在设计过程中,应考虑使用者的活动空间,确保产品在使用过程中不会限制使用 者的活动范围,提高产品的易用性和舒适性。
人体姿态与运动模拟
通过CATIA的仿真功能,设计师可以 模拟人体在不同条件下的姿态和运动, 以便评估设计的舒适度和适用性。
CATIA与其他设计软件的比较
1 2 3
与SolidWorks的比较
CATIA在复杂曲面设计和高级仿真方面优于 SolidWorks。
catia人机工程

箭头,有色区域显示了令在所选自由度内的运动极限。
o
绿箭头代表运动上限。
o
黄箭头代表运动下限。
o
蓝箭头代表关节目前所处位置。
2. 双击极限箭头,会出现角度极限对话框:
3. 利用这个对话框可解锁角度极限设置,利用滑块、微调或点击微雕箭头来调整极限值
o
选择 reset 按钮可返回默认设置。
o
选择 close 按钮可退出对话框
Central cone (锥形中心)
Cone type (锥形)
Others(其他)
Center of gravity (重心)
时选择其他的显示类型
选择适当的按钮改变人体模型显示品质,也可以同
Rendering
Segments
Ellipses
Surfaces
Resolution
鉴别率是指在创建人体模型时,由椭圆拖拽成人体表面是所呈现出点的个数,默认值是 32,但这个之可在 4 到 128 之间变化。
1. 选中一个人体关节,然后按着 ctrl 键可以选择更多的人体关节。 2. 选择“Set Angular Limitations as a Percentage icon(根据百分率设置极限角度)”
按钮.
便会出现以下对话框
在一个只读性的文件列表中会出现所选文件及自由度类型。
3. 在微调控制器中在 0-100 中选择一个数值. 4. 点击“ok”或“cancel”按钮以确认或取消当前设置功能。 如果所选自由度以某一个数值被锁,并且这个值在所设定范围之外,那么以上操作便不会 进行。在这种情况下会出现以下对话框:
设置。
关节
在人体姿势对话框人体模型名称下是与树目录人体模型各关节相对应的关节名称。点击名 称可以选择各关节。
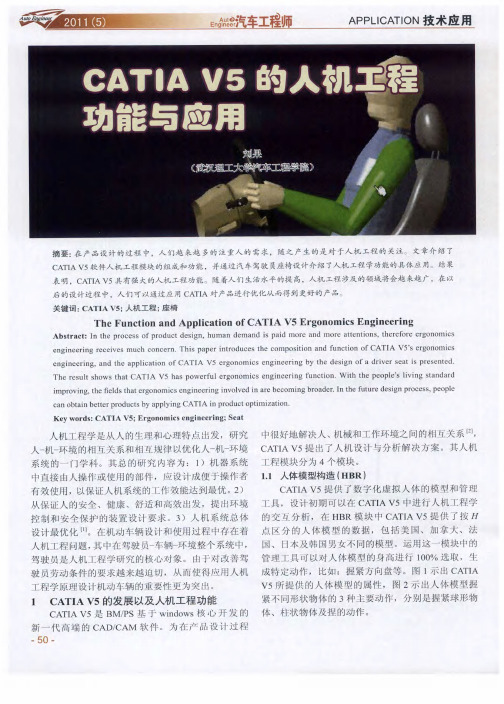
CATIA V5的人机工程功能与应用
2 0 : 5— 6 0 2 1 1.
由于 驾驶 人 员 的 身材 有 差 异 ,可 以再 选 取 9 5百
【】张 立 斌 . 机 工程 学 及其 在汽 车设 计 中 的应 用 []汽 车 运 用, 5 人 J.
20 9 ( ): 00百分 位 的人 体 模 型 ,确 定 出驾 驶 员座 椅 设
( 稿 日期 : 001 —8 收 2 1 .20 )
( 上接 第3页) 8
电动汽 车动 力传 动系 统参数 设 计及合 理 匹配对 其 性能有 很大 的影 响 。根 据 整车动 力 性要求 ,通 过理论
计 算 ,对 电动汽 车 电机 、电池和 传动 系统 进行 匹配计
誓 ¨ 凸 星 j
需将 人体 模型 直接 放入 到所 考 虑 的设备 之 中,减 少 了
制 作 人体 模 型 的过程 ,而 且在 C T A V5中可 以对 人 A I
图 2 人体 模 型 的 修 改
体数据 进 行调 整 ,如 图 1 图 2所 示 ,使得人 体 模型 和
1 人体 测量编辑 ( . 2 HME) 此 模块 可 以通 过人 体测 量 学工 具生 成较 为 高级 的
真 结果 表 明, 电动 汽车 的最 大车 速 、加 速 性和爬 坡性
等 动 力性能 能够满 足 设计 的要求 ,说 明整车 匹配 方案
【 4 】朱正礼,殷承 良,张建武 .基于遗传算法的纯电动汽车动力总成参 数优化 [] J.上海交通大学学报,2 0 ,3 1):10 -9 2 0 4 8(1 9 717 .
参 数满 足 实际要 求 。 由于 驾驶者 身 材各 异 ,所 以在设 计 时必须 对 人机
用 户 自定义人 体模 型 ,从 而使 人体 模 型与 驾驶 员 的模 工程 进行 仔 细研 究 ,确 定其尺 寸 J 于操 作姿 势来 。对 型 吻合 ,得到 更 为精确 的数 据 。在 此模 块 中系 统预 设 说 ,行驶 过程 中驾 驶 员 的脚 始 终放 在踏 板上 , 由于不 了立姿 、 平举 、延伸 平 举 、侧平 举 、坐姿 和跪 姿 6种 同工况 踏板 的角 度 也是有 变化 的,通过试 验 ,由座 椅 、 前 姿势 。可 以根据 实 际要 求先 预 设 1种姿 势 ( 驾驶 员 踏 板和 转 向盘 的位 置 以及驾 驶姿 势参 数 的变化 得 到驾 如 的坐 姿 )然 后在 该姿 势 的基础 上进 行修 改 。
附录1_运用CATIA进行人因工程学设计
CATIA的应用
• 在汽车工业、造船工业、厂房设计中得到 广泛应用。
• CATIA也已用于设计和制造如下多种产品: 餐具、计算机、厨房设备、电视和收音机 以及庭院设备。
• 快速上肢评价(RULA) • 分析条件与结果(高级模式)
• 升降分析 • 初始姿势编辑好 • 按下记录 • 终止姿势编辑好 • 按下记录,得结果
• 初始姿势编辑好 • 推拉分析
• 能安全完成任务的 百分比
• 所需初始力 • 所需持续力
• 搬运分析 • 分析条件与结果
生物力学单一动作分析
• 2,选择两个要 测量的对象
按下 (应 用) 按钮 得到 测量 值
• 范围 分析
• 最大 与最 小值 设定
• 按(应 用)
计算接触 空间
• 1.点选 • 2.点选手的
某点,比 如手指 • 3.得到该点 的接触空 间
• 点选气泡, 按右键,在 菜单中选 Delete可清 除该气泡显 示。
运用CATIA进行人因工程设计
进入 人体 模型 设计 界面
建 立 标 准 人 体 模 型
点取
人体 模型 参数
人体 模型 显示 于场 景中
设定人体模型
属性
• 人体表 示方法
• 人的视 觉范围
运用CATIA进行人因工程设计
• 1、建立人体模型 • 2、人体模型姿态 • 3、人体模型编辑 • 4、人体模型的高级设置 • 5、人体测量编辑 • 6、人体模型姿态分析 • 7、人体运动分析
运用CATIA进行人因工程设计
装载机驾驶员的CATIA坐姿仿真及人机工程学分析

厶—H点 到膝关节点 的长度 ; 厂 膝关 节点 到踝关 节点 的长 L 厶一 肩关节点到肘关节点 的长度 ; 厶一肘关节点 到腕关节 点 的长度 ; 一腕关节点到手心 的长度 ; —踝关节点 到脚底 平 面的垂直距 离 ; 一 踵点到 定 义 中垂足 的距离 ; 。一 Lo _ 踵点 到踝 关 节点 的长度 ; 颈 部到 头部 的距离 ; 一方 L。 一 向盘 直 径 ; r L一方 向杆 长 度 ; 一 踝 点 与 踵 点 的 连 线 和 鞋 底 口 平面 的夹 角
首选 角 度 。同理 ,也可 以进 行其 它部 分 的评价 。
例 如 已知 大 腿 和 小 腿 的 舒 适 夹 角 范 围 9 。~ 5
平 面 之 间 的夹 角不 舒 适 ,而 与 该 夹 角 直 接 关 联 的
是 日点 ( 4中标 示 HP 图 T的点 )与 踵 点 ( 4中 图
标 示 AHP的点 )的垂 直 距 离 Z和 踏板 角 度 。 可 以
转a i [\ a = 向 ] 器 a , f L
L一 日 点 到 颈 关 节 点 的 长 度 ; 2 日 点 到 肩 关 节 点 的 长 度 L一
图 4 人 体 坐 姿数 学模 型及 其 坐 标 系
小 腿 的 夹 角 不 舒 适 。影 响 该 角 的 主 要 因素 是 日点
与踵 点 的水平 距离 ,因此 可 以对 于该距 离 进行 适 当
调整 。此 时需 要 注意 调整 方 向盘下 缘 与座 椅靠 背之 间 的距 离 在 3 0~ 4 0 0 0 mm 范 围 , 以合 理 的空 间保
小腿轴线与踏平面 a 躯干轴线 与上臂轴线 a 上臂轴线 与前 臂轴 线 a 。
前 臂 轴 线 与 手 中心 轴 线 a 踏 平 面 与脚 底 板 a
CATIA---人机工程模块实用教程

视野功能1/2
2
单击需要提供视野的人体模型,出现视野窗口
1
单击命令
3
右键视野窗口,出现对话框,可以对视野属性进行修改
视野功能2/24视属性概况上肢伸展域2
单击人体模型的 手掌或者手指
1
单击命令
只能单击手 掌或者手指
人体模型测量编辑1/2
1
2
单击命令
进入人体编辑模块
3
选择需要编辑的人体模型
4
1
2
单击需要首选角度的 人体模型部位
4
关闭编辑对话框
5
单击命令退出此部位 编辑,并依次设置其 他部位首选角度
人体模型姿态评估与优化-评 估
1
3
显示各部分分值
单击命令
2
单击需要评估的人体 模型
4
单击chat以列表形式显示
人体模型姿态评估与优化-优化
1
单击命令
2
优化人体模型
优化后人体模型
优化前人体模型
人体模型姿态3-标准姿态
3
2
选择需要调整姿 态的人体模型 对其标准姿态参数 进行调整
4
回复标准姿态:右键人体模型树 ,如下选择
1
单击命令
2
人体模型编辑-自由移动
1
单击需要移动的部位, 罗盘随之移动到此处
3
移动罗盘想要的位置
单击命令
人体模型编辑-姿势交换
交换之前
交换后
右键人体模型,单击SWAP命令
人机工程
建立人体模型
1 2 3
输入参数
4
OK
人体模型属性
1 2
单击命令
选择需要调整属 性的人体模型
3
CATIA人机分析模块
CATIA人机工程模块• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析人体模型建立完成后,修改设置人体模型的显示属性• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析四肢及头部摆(转)动角度界限 动画视角接 合:可接合人体模型的6对部位(肩部、大臂、前臂、大腿、小腿、踝部)改变其活动范围;角度界限:显示隐藏角度界限;动画视角:在某一自由度上放大显示所选择的部位,提供最佳视角。
应用放置功能以参考点为基准移动,点选无先后顺序标准姿态:主要用于蹲坐、弯腰、扭曲、倾斜以及肘部的调整等姿态• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析人体模型属性编辑改变身体某个部位的姿势(摸索)可以在人体的7个部位上建立移动坐标坐标系方向与CATIA 坐标系一致坐标系方向根据人体关节确定肢体的精确定位(出击)坐标系方向可变坐标系方向不变人体模型姿势、复制重置与交换右键人体模型视野功能• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析碰撞检查绑定与解除绑定:对于product应在结构树中选取,否侧应多次绑定解除一解除二回位定义偏移量偏移命令用于重新定义定位模式的动作,定位模式的默认动作中心点是身体部位的“末端”点,在某些定位中可通过重新定义中心点,简化操作过程。
上肢伸展域人体上肢的伸展域往往决定工作空间的世界一级工作空间内设备等物体的位置和设备的结构的设计。
注意:只能选择手或手指人体模型的约束应用人体模型的约束功能,可以使人体模型在IK模式中,精确地达到用户要求的姿态。
CATIA人机模块课件综述

视野
平衡 重心 参考判断作业姿势强度, 红线表示人体不平衡
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框 本命令中其他操作需与其他 命令配合进行,演练说明。
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
先点击模 型,之后 选择命令, 出现图片 状态,点 击左键, 模型就会 快速移动。
二、 人机模块操作-其他命令
3.快速移动命令
课题:罗盘怎么 放回去?
操作步骤:右键点击罗盘— 选择图片命令—点击模型— 拖拽罗盘,模型相应跟着移 动。
二、 人机模块操作-其他命令
罗盘放回:
操作步骤:右键点击罗盘—选择图片命 令—拖拽罗盘至右下角绝对坐标—松开 罗盘即可。
选择Chinese(taiwan),若版本没有此选 项,选择korean。
根据需要选择模型人体的全身或局部。
模型人体出现或移动时的零点坐标,建议选 择Between Feet。
二、 人机模块操作-常用命令
透视图,调整 模型显示精度 点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
后记
以上为CATIA人机模拟的基本操作,由于本人水平有 限,部分命令未进行讲解,后续与大家相互学习,相互提 高,谢谢!
感谢聆听!
二、 人机模块操作-常用命令
1.模型设置命令
常用操作命令4个,和2个辅助命令
常用操作命令4个
ห้องสมุดไป่ตู้
辅助命令2个
其他命令在CATIA内使用频次不多, DELMIA软件使用,此处体现。
二、 人机模块操作-常用命令
注意 先点 结构 树
基于CATIA软件的人机工程设计中作业姿态分析
基于CATIA软件的人机工程设计中作业姿态分析[摘要]针对现代制造系统中的手工作业工位,应用CATIA软件的人机工程设计模块,分析选定人体模型,进行了作业姿态分析。
其中包括视野分析、双手伸展域分析、人体姿态评估、快速上肢评价等。
提出了作业过程中对设备布局的要求,以及操作人员受到损伤的主要身体部位。
【关键词】CATIA;人机工程;伸展域;上肢评价引言随着我国工业化进程的加快,无纸设计、3D数字设计的优越性逐渐凸显。
CAD软件已经成为工程技术人员必需掌握的一项技能。
运用CAD软件,可很大程度地提高设计人员的工作效率,将许多繁琐的工作直接交由软件处理。
CATIA 是由法国达索飞机公司于1975开发的一套三维设计软件,并且随着科学技术的进步不断完善,至今已被广泛应用于汽车制造等行业。
CATIA的人机工程设计模块是一个面向对象的系统,它可以使设计者很容易地进行人因工程学方面的设计。
利用此软件可以非常方便的将人机工效与厂房布局设计、机械设计等模块有效结合,使设计更加的人性化和合理化[1]。
应用CATIA,可以形象模拟现代生产制造系统中操作人员的各项运动姿势和操作状态。
从而易于设计人员进行各项人机工程方面的参数规划,同时,其再现和确认功能生产制造的人性化提供一种高效设计方法。
1、CATIA软件概述CATIA的人机工程设计模块共分为四部分[2]:人体尺寸编辑(Human Measurements Editor)、人体动作分析(Human Activity Analysis)、人体模型建立(Human Model Builder)、人体姿态分析(Human Posture Analysis)。
CATIA V5R20内共集成了七个地区的人体模型: American、French、Canadian、Korean、German、Japanese、Chinese(Taiwan)。
人体模型创建模块是基于最佳人体模型系统建立的,为确保操作者的正常工作,添加使设计者能够在工作之前实现人体工作状况的详细研究,进行非常精确的人体仿真,虚拟人体与工作环境之间的相互关系。
CATIA工程分析教程

图8-3选择夹紧约束表面
2. 表面滑动约束
该约束施加于形体表面,使得表面上的节点只能沿着与此 表面滑动,而不能沿此表面有法线方向的运动。施加此约束的过 程是:(1)单击该图标,弹出与图8-2类似的表面滑动约束对 话框。(2)选择约束对象(形体表面),单击OK按钮。在所选 形体表面和特征树的相应节点处产生了滑动约束的标记,见图 8-4。
第8章 工程分析
8.1 进入工程分析模块 8.2 施加约束 8.3 施加载荷 8.4 静态有限元计算过程和后处理 8.5 动态分析的前处理和显示计算结果 8.6 有限元分析实例 习题
工程分析指的是有限元分析,包括静态分析(Static Analyses)和动态分析。动态分析又分为限制状态固有频率分
力图或特征树的 节点,将弹出图8-27(b)所示图像编辑对话 框。通过该对话框选择不同的频率阶数,即可得到相应的位移图 。图8-28是频率阶数为10时形体的位移图。
图8-28形体的位移显示图
3. 模态的动画显示 单击该图标,弹出图8-29(b)所示动画窗口。该窗口
的图像按钮与播放影像设备的按钮用法相同。通过这些按钮详细 地观察形体在不同时刻应力或位移的变化。
8.2 施加约束
1. 夹紧约束 该约束施加于形体表面或边界,使其上的所有节点的位
置固定不变(三个平移自由度全部约束)。施加夹紧约束的 过程是:(1)单击该图标,弹出图8-2所示夹紧约束对话框 。(2)选择约束对象(曲面或边界),例如选择形体的一个 表面,单击OK按钮。在所选形体表面和特征树的相应节点处 产生了夹紧约束标记,见图8-3。
8.5.1动态分析前处理 1. 施加约束
动态分析中约束有clamp(夹紧)、Surface Slider(曲面 滑动)和Advanced Restraints(高级自由度约束)三种类型。 如果在进入工程分析模块时选择了Frequency Analyses,就需 要对形体施加一定的约束,施加约束的方法同静态分析。
CATIA人机工程模块讲义

CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
C机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
演讲完毕,谢谢听讲!
再见,see you again
2020/10/30
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义
CATIA人机工程模块讲义