多旋翼无人机教案
文档多旋翼无人机技术基础PPT学习教案

会计学
1
多旋翼无人机结构动力学
目的
多旋翼无人机结构动力学的目的就是研究关于多旋翼无
人机结构动力系统振动固有特性,它在外激励作用下产生
动响应的基本理论和分析方法,以使多旋翼无人机结构具
有优良的动力学特性。根据多旋翼无人机结构动力系统输
入、输出与系统特性三者之间的关系,可归纳为三类问题。
与系统本身的物理性质(弹性和惯性)有关,故称为系统
的固有频率。
(2)刚度相同的两个单自由度系统,其固有频率随质量的增
大而减小;质量相同的两个系统,其固有频率随系统刚度
的增大而增大。
(3)系统的初始条件对系统固有频率没有影响,而振幅X与初
相位φ均由初始条件决定。振幅和初相位都决定于初始条件,
这是自由振动的共同特性。
M pj
I pj
) 2
式中lpj、Mpj、Ipj分别为挥舞铰外伸量、绕挥舞铰的质量静矩及惯矩。
R l pj
mxdx
M pj
0
R l pj
I pj
mx
2
dx
0
当挥舞铰外伸量lpj=0时(中心铰),如翘翘板式旋翼,ωβ0=1Ω。当挥舞铰
外伸量lpj>0时,由于构造上的限制,挥舞铰外伸量不可能太大,即使是
频率,表示频率f的2π倍,单位为弧度/秒(rad/s);T=1/f为周
期
ω0=2πf=2π/T
第12页/共50页
简谐振动复数表示方法
根据复数的矢量表示法,在复平面上的一个复数Z代表该复平面(Re,
Im)上的一个矢量,如图矢量0P所示。图中Re表示实轴,Im表示虚轴,
矢量的模就是复数Z的模A,其位置由复角θ确定。如果矢量0P绕0点以等
无人机技术基础 多旋翼无人机的操纵原理-教案.pptx

《无人机技术基础》
教案
一、多旋翼无人机的飞行原理
由伯努利定理可知,旋翼下方空气流速慢静压力大,旋翼上方空气流速快静压力小,由此压差而形成向上的作用力,即升力。
由升力公式可知,四个螺旋桨转速相同时,产生的升力也相同。
即对应四个旋翼的升力相等,F_1 = F_2= F_3= F_4。
当四个旋翼的升力和F大于重力的时候,无人机上升;升力小于重力时无人机下降,而两者相等时,无人机处于悬停状态。
通过调节多旋翼上各个电机的转速,可实现多旋翼无人机垂直升降,空中悬停,小速度前飞、后飞、侧飞、原地旋转等。
如沿着三个正交坐标轴的平移移动、和旋转运动,以及多通道组合下的自由移动。
二、多旋翼无人机的操纵原理
1.升降运动
四个旋翼电机转速同步增加或减小,就可以实现多旋翼无人机的垂直上升或垂直下降。
即升力大于重力时上升,小于重力时下降。
2.俯仰运动
指无人机能绕横轴(Y轴)转动。
当电机1加速,电机3减速,两者变化量相等时,可沿X负方向运动。
当电机1减速,电机3加速,两者变化量相等时,无人机可沿X正方向运动。
这时2、4号电机转速保持不变。
由于1、3号电机的变化量均相等,可知升力的总和并未发生变化。
即,在不改变升力合力的情况下,实现俯仰运动。
3.滚转运动
指无人机能绕纵轴(X轴)转动.当电机4减速,电机2加速,变化量相等时,无人机向左滚转。
当电机2减速,电机4加速,变化量相等时,无人机向右滚转。
同样,2、4号电机变化量相等,则升力的总和不变。
即,在不改变升
第二页(共2页)。
多旋翼无人机教案

多旋翼无人机教案多旋翼无人机教案一、教学目标1、了解多旋翼无人机的结构及工作原理;2、掌握多旋翼无人机的飞行操作技巧;3、理解多旋翼无人机在各个领域的应用;4、提高学生对科技的兴趣,培养他们的实践能力。
二、教学内容1、多旋翼无人机基础知识1、多旋翼无人机的定义、分类及特点;2、多旋翼无人机的结构组成。
2、多旋翼无人机的工作原理1、电机和电调的工作原理;2、遥控器的操作原理;3、飞行控制系统的组成及工作原理。
3、多旋翼无人机的飞行操作技巧1、起飞和降落的注意事项及操作技巧;2、平飞、转弯、升降等基本飞行技巧;3、紧急情况下的应急处理方法。
4、多旋翼无人机在各个领域的应用1、农业、环保、救援等领域的应用;2、多旋翼无人机在摄影、影视制作等方面的应用。
三、教学方法1、理论讲解:通过PPT、视频等形式向学生讲解多旋翼无人机的基本知识和工作原理;2、实践操作:通过实际操作让学生掌握多旋翼无人机的飞行操作技巧;3、案例分析:通过案例分析让学生了解多旋翼无人机在各个领域的应用;4、互动讨论:让学生分组讨论,分享学习心得和体会。
四、教学步骤1、导入新课,介绍多旋翼无人机的基本知识和特点;2、讲解多旋翼无人机的工作原理,通过实验和演示让学生理解;3、讲解多旋翼无人机的飞行操作技巧,通过实际操作让学生掌握;4、分析多旋翼无人机在各个领域的应用,通过案例让学生了解;5、学生分组讨论,分享学习心得和体会;6、布置作业,让学生进一步巩固所学知识。
五、教学评估1、通过课堂提问和练习来检测学生对多旋翼无人机的基本知识和操作技巧的掌握情况;2、通过作业和实际操作来评估学生对多旋翼无人机的应用能力;3、通过学生分组讨论和分享来评估他们的学习效果。
六、教学资源1、PPT或视频资料:用于讲解多旋翼无人机的基本知识和工作原理;2、实验和演示器材:用于演示多旋翼无人机的工作原理和飞行操作技巧;3、案例和分析资料:用于分析多旋翼无人机在各个领域的应用。
无人机操作教案三篇
无人机操作教案三篇篇一:多旋翼无人机操作教案课程名称:多旋翼无人机操作基础授课教师:程名称:多旋翼无人机操作基础授课教师:课时二课时课程内容一、组织教学二、复习前一节课的内容三、导入新课四、教学内容:1、无人飞行器的种类繁多,主要包括飞艇、固定翼无人机、伞翼无人机、扑翼无人机、变翼无人机、旋翼式无人机等。
2、多旋翼飞行器也称为多轴飞行器,是直升机的一种,它通常有3个以上的旋翼。
飞行器的机动性通过改变不同旋翼的扭力和转速来实现。
相比传统的单水平旋翼直升机,它构造精简,易于维护,操作简便,稳定性高且携带方便。
常见的多旋翼飞行器。
3、四旋翼,六旋翼和八旋翼,被广泛用于影视航拍、安全监控、农业植保、电力巡线等领域(多旋翼无人机)(航拍无人机)(固定翼无人机)课程后记学员对无人机的用途很有兴趣程名称:多旋翼无人机操作基础授课教师:课题多旋翼飞行器的构造教学目标1、多旋翼飞行器的原件构造和组成。
2、多旋翼飞行器各个配件的应用。
教学重点多旋翼飞行器组成构造及应用教材分析多旋翼飞行器重要组成构件的理解教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、复习前一节课的内容三、导入新课四、教学内容:1、多旋翼飞行器主要由机架、电机、电调和桨叶组成,为了满足实际飞行需要,一般还需要配备电池、遥控器及飞行辅助控制系统。
(无人机的组成及构造)2、机架:机架是指多旋翼飞行器的机身架,是整个飞行系统的飞行载体。
一般使用高强度重量轻的材料,例如碳纤维、PA66+30GF等材料。
3、电机是由电动机主体和驱动器组成,是一种典型的机电一体化产品。
在整个飞行系统中,起到提供动力的作用。
4、电调全称电子调速器,英文electronic speed controller,简称ESC。
在整个飞行系统中,电调主要提供驱动电机的指令,课程名称:多旋翼无人机操作基础授课教师:3、垂直运动,即升降控制,在图(a)中,两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
旋翼无人机操作教案中班
旋翼无人机操作教案中班教案标题:旋翼无人机操作教案(中班)教案目标:1. 介绍无人机的基本概念和组成部分,培养学生对无人机的兴趣和好奇心。
2. 培养学生的观察力、动手能力和团队合作精神。
3. 帮助学生了解无人机的操作原理和安全注意事项。
4. 引导学生进行简单的无人机操控实践,提升学生的空间认知和手眼协调能力。
教具准备:1. 旋翼无人机模型(适合中班学生使用的小型模型)。
2. 无人机遥控器(确保遥控器易于操作,并有简单的控制按钮)。
3. 展示板或幻灯片,用于介绍无人机的基本知识和操作原理。
4. 安全帽或护目镜,确保学生在操作无人机时的安全。
教学步骤:引入(5分钟):1. 展示一张无人机的图片,引发学生对无人机的好奇心和兴趣。
2. 向学生简要介绍无人机是一种可以在空中飞行的机器,可以用来拍摄照片、传递物品等。
知识讲解(10分钟):1. 使用展示板或幻灯片向学生介绍无人机的基本组成部分,如机身、旋翼、遥控器等。
2. 解释无人机的操作原理,即通过遥控器控制旋翼的转速和方向来控制无人机的飞行。
3. 强调无人机操作的安全注意事项,如在开放空间操作、避免靠近人群等。
示范操作(10分钟):1. 向学生展示如何正确佩戴安全帽或护目镜。
2. 演示如何使用遥控器控制无人机的起飞、降落、前进、后退等基本操作。
3. 重点强调遥控器的操作按钮和指示灯的含义。
实践操作(20分钟):1. 将学生分成小组,每组由一名学生操作无人机,其他学生观察和记录。
2. 学生轮流操作无人机,进行简单的飞行操控练习。
3. 教师和助教在一旁提供指导和帮助,确保学生的安全和操作正确性。
总结(5分钟):1. 与学生一起回顾无人机的基本组成部分和操作原理。
2. 鼓励学生分享他们的操作经验和感受。
3. 强调学生在操作无人机时要遵守安全规则和团队合作。
拓展活动:1. 鼓励学生使用无人机进行简单的拍摄活动,如拍摄校园风景或同学们的合影。
2. 组织学生进行无人机飞行比赛,鼓励他们展示操作技巧和团队合作精神。
多旋翼无人机教案设计课程
哈尔滨四通技工学校第三教学站延寿农民工综合培训学校多旋翼无人机操作教案二0一七春季生便,稳定性高且携带方便。
常见的多旋翼飞行器。
3、四旋翼,六旋翼和八旋翼,被广泛用于影视航拍、安全监控、农业植保、电力巡线等领域(多旋翼无人机)(航拍无人机)(固定翼无人机)课程后记学员对无人机的用途很有兴趣(无人机的组成及构造)2、机架:机架是指多旋翼飞行器的机身架,是整个飞行系统的飞行载体。
一般使用高强度重量轻的材料,例如碳纤维、PA66+30GF等材料。
3、电机是由电动机主体和驱动器组成,是一种典型的机电一体化产品。
在整个飞行系统中,起到提供动力的作用。
4、电调全称电子调速器,英文electronic speed controller,简称ESC。
在整个飞行系统中,电调主要提供驱动电机的指令,来控制电机,完成规定的速度和动作等。
5、电池是将化学能转化成电能的装置。
在整个气动力扭矩效应全被抵消。
与传统的直升机相比,四旋翼飞行器的优势:各个旋翼对机身所产生的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
3、垂直运动,即升降控制,在图(a)中,两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
保证四个旋翼转速同步增加或减小是垂直运动的关键。
4、俯仰运动,即前后控制,在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。
为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。
由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
无人机操控技术 教案:多旋翼定机头画方练习
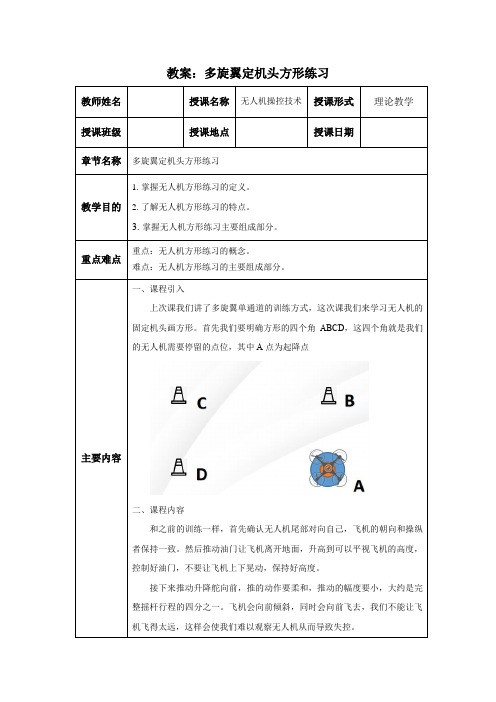
教案:多旋翼定机头方形练习
一、课程引入
上次课我们讲了多旋翼单通道的训练方式,这次课我们来学习无人机的固定机头画方形。
首先我们要明确方形的四个角ABCD,这四个角就是我们的无人机需要停留的点位,其中A点为起降点
二、课程内容
和之前的训练一样,首先确认无人机尾部对向自己,飞机的朝向和操纵者保持一致。
然后推动油门让飞机离开地面,升高到可以平视飞机的高度,控制好油门,不要让飞机上下晃动,保持好高度。
接下来推动升降舵向前,推的动作要柔和,推动的幅度要小,大约是完整摇杆行程的四分之一。
飞机会向前倾斜,同时会向前飞去,我们不能让飞机飞得太远,这样会使我们难以观察无人机从而导致失控。
无人机操控技术 教案:认识多旋翼模拟器
今天的课就上到这里,我们下次课再见。
三、本节小结
1.无人机模拟器的概念;
2.无人机模拟器的特点;
3.无人机模拟器的主要组成部分。
无人机模拟器由两部分组成,一是电脑端,需要在家庭电脑上安装软件并运行,目前最常见的无人机模拟器软件是“凤凰模拟器”。另一部分是模拟遥控器端,需要自行购买。模拟遥控器端的外形很像一个遥控器,但是它并不具备遥控无人机的功能。
模拟遥控器有两根操纵杆,分别控制无人机的4个通道,其中有几种不同的布局。美国手左摇杆上下为油门,左右为方向,右摇杆上下为升降,左右为副翼。而日本手左摇杆上下为升降,左右为方向,右摇杆上下为油门,左右为副翼。除了这两种布局外,还有一些冷门布局就不一一举例了。
教案:认识多旋翼模拟器
教师姓名
授课名称
无人机操控技术
授课形式
理论教学
授课班级
授课地点
授课日期
章节名称
认识多旋翼模拟器
教学目的
1.掌握无人机模拟器的定义。
2.了解无人机模拟器的特点。
3.掌握无人机模拟器主要组成部分。
重点难点
重点:无人机及无人机模拟器的概念。
难点:无人机模拟器的主要组成部分。
主要内容
一、课程引入
飞行模拟器具有安全、可靠、方便、经济、工作效率高,且不受气象条件限制等优点,因此发展相当迅速。它的历史可追溯至20年代,
早在1929年,美国的爱德华·林克就设计出世界上第一台机械式的飞行模拟器,称为林克机。随着科学技术的进步,飞行模拟器也变得越来越先进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈尔滨四通技工学校第三教学站延寿农民工综合培训学校多旋翼无人机操作教案二0 —七春季生1/1多旋翼无人机操作基础 授课教师:张海东第一章无人飞行器概述 1、 无人飞行器发展简史2、 无人飞行器的优缺点3、 无人飞行器应用领域1、 什么事无人机2、 无人机的应用3、 无人机未来的发展趋势无人机的概述重要性,帮助学员更好的了解无人 机。
讲授法新课二课时一、 组织教学二、 课前提问三、 导入新课四、 教学内容:1、1910年,在莱特兄弟所取得的成功的鼓舞 下,来自俄亥俄州的年轻军事工程师查尔斯•科特林 建议使用没有人驾驶的飞行器:用钟表机械装置控 制飞机,使其在预定地点抛掉机翼并象炸弹一样落 向敌人。
在美国陆军的支持和资助下,他制成并试 验了几个模型,取名为“科特林空中鱼雷”、“科 特林虫子”。
2【二战期间,美国海军首先将无人机作为空面 武器使用。
1944年,美国海军为了对德国潜艇基地 进行打击,使用了由B-17轰炸机改装的遥控舰载 机。
3、上世纪70-90年代及其以后,以色列军事专 家、科学家和设计师对无人驾驶技术装备的发展做 出了突岀贡献,并使以色列在世界无人驾驶系统的 研制和作战使用领域占有重要地位。
4、 最著名的是“捕食者”可复用无人机,世界 上最大的无人机- - “全球鹰”,“影子・200”低空 无人机,“扫描鹰”小型无人机,“火力侦察兵” 无人直升课程名称: 课题 教学目标 教学重点 教材分析 教学方法 授课类型 课时课程内容机。
5、理论开创阶段,多旋翼无人飞行器理论开创于上世纪10年代,直升机研发之前。
几家主要飞机生产商开发出的在多个螺旋桨屮搭乘飞行员的机型。
这种设计开创了多旋翼飞行器的理论。
6、加速发展阶段,2007年以后,装配高性能压电陶瓷陀螺仪和角速度传感器(六轴陀螺仪)的多旋翼无人飞行器开始出现加速发展。
7、未来发展阶段,伴随着飞行器技术的进步,多旋翼无人飞行器使用者会急剧增加。
这样一来,事故和故障也会相应增加,甚至会发展成社会问题。
今后不仅是制造商和商店一级,协会和主管部门面向多旋翼无人飞行器的飞行会和培训班也会增加。
8、优点的特性。
9、避免牺牲空勤人员,因为飞机上不需要飞行人员,所以最大可能地保障了人的生命安全。
10、无人机尺寸相对较小,设计时不受驾驶员生理条件限制,可以有很大的工作强度,不需要人员生存保障系统和应急救生系统等,大大地减轻了飞机重量。
11、制造成本与寿命周期费用低,没有昂贵的训练费用和维护费用,机体使用寿命长,检修和维护简单。
12、无人机的技术优势是能够定点起飞,降落,对起降场地的条件要求不高,可以通过无线电遥控或通过机载计算机实现远程遥控。
课程后记给学生留了上网查询无人机的信息的作业。
程名称:多旋翼无人机操作基础授课教师:张海东课题无人飞行器应用领域及分类教学目标1、无人飞行器的应用理解2、无人飞行器的分类识别教学重点多旋翼概述及分类教材分析无人机的种类划分教学方法讲授法授课类型新课课时二课时课程内容一、组织教学二、着习前一节课的内容三、导入新课四、教学内容:1、无人飞行器的种类繁多,主要包括飞艇、固定翼无人机、伞翼无人机、扑翼无人机、变翼无人机、旋翼式无人机等。
2、多旋翼飞行器也称为多轴飞行器,是直升机的一种,它通常有3个以上的旋翼。
飞行器的机动性通过改变不同旋翼的扭力和转速来实现。
相比传统的单水平旋翼直升机,它构造精简,易于维护,操作简便,稳定性高且携带方便。
常见的多旋翼飞行器。
3、四旋翼,六旋翼和八旋翼,被广泛用于影视航拍、安全监控、农业植保、电力巡线等领域(固定翼无人机)课程后记学员对无人机的用途很有兴趣程名称:多旋翼无人机操作基础授课教师:张海东课题多旋翼飞行器的构造教学目标1、多旋翼飞行器的原件构造和组成。
2、多旋翼飞行器各个配件的应用。
教学重点多旋翼飞行器组成构造及应用教材分析多旋翼飞行器重要组成构件的理解教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、韦习前一节课的内容三、导入新课四、教学内容:1、多旋翼飞行器主要由机架、电机、电调和桨叶组成,为了满足实际飞行需要,一般还需要配备电池、遥控器及飞行辅助控制系统。
3、电机是由电动机主体和驱动器组成,是一种典型的机电一体化产品。
在整个飞行系统中,起到提供动力的作用。
4、电调全称电了调速器,英文electronic speedcontroller,简称ESC。
在整个飞行系统中,电调主要提供驱动电机的指令,来控制电机,完成规定的速度和动作等。
5、电池是将化学能转化成电能的装置。
在整个飞行系统屮,电池作为能源储备,为整个动力系统和其他电子设备提供电力来源。
目前在多旋翼飞行器上,一般采用普通锂电池或者智能锂电池等。
6、遥控系统由遥控器和接收机组成,是整个飞行系统的无线控制终端。
7、飞行控制系统集成了高精度的感应器元件,主要由陀螺仪(飞行姿态感知),加速计,角速度计,气压计,GPS及指南针模块(可选配),以及控制电路等部件组成。
通过高效的控制算法内核,能够精准地感应并计算出飞行器的飞行姿态等数据,再通过主控制单元实现精准定位悬停和自主平稳飞行。
根据机型的不一样,可以有不同类型的飞行辅助控制系统,有支持固定翼、多旋翼及直升机的飞行控制系统。
课程后记课程名称:多旋翼无人机操作基础授课教师:张海东课题多旋翼飞行原理教学目标1、多旋翼飞行器的飞行原理详解。
2、飞行动作的垂直运动,即升降控制了解。
3、飞行动作的俯仰运动,即前后控制了解。
教学重点多旋翼飞行器的各种飞行动作的原理教材分析从实际飞行动作来了解无人机的飞行姿态教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、课前提问三、导入新课四、教学内容:1、多旋翼飞行器是通过调节多个电机转速来改变螺旋桨转速,实现升力的变化,进而达到飞行姿态控制的目的。
2、以四旋翼飞行器为例,飞行原理如下图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此飞行器平衡飞行时,陀螺效应和空气动力扭矩效应全被抵消。
与传统的直升机相比,四旋翼飞行器的优势:各个旋翼对机身所产生的反扭矩与旋翼的旋转方向相反,因此当电机1 和电机3逆时针旋转时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
3、垂直运动,即升降控制,在图(a)中,两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
保证四个旋翼转速同步增加或减小是垂直运动的关键。
▲Q)垂直运动4、俯仰运动,即刖后控制,在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。
为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。
由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
5、横滚运动,即左右控制,与图(b)的原理相同,在图(c)中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,便可以使机身绕x 轴方向旋转,从而实现飞行器横滚运动。
课程后记6、偏航运动,即旋转控制,四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。
旋翼转动过程屮由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼屮的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。
俊航运动课程名称:多旋翼无人机操作基础授课教师:张海东课题第二章多旋翼飞行控制系统概述教学目标1、了解飞行控制系统存在的意义2、掌握飞行控制系统主要部件教学重点无人机飞行控制系统主要功能的学习教材分析主要讲述无人机的控制系统教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、课前提问三、导入新课四、教学内容:1、飞行控制系统通过高效的控制算法内核,能够精准地感应并计算出飞行器的飞行姿态等数据,再通过主控制单元实现精准定位悬停和自主平稳飞行。
2、飞行控制系统是目前实现简单操控和精准飞行的必备武器。
3、飞行控制系统一般主要由主控单元、IMU (惯性测量单元)、GPS指南针模块、LED指示灯模块等部件组成。
(1)主控单元是飞行控制系统的核心,通过它将IMU、GPS指南针、舵机和遥控接收机等设备接入飞行控制系统从而实现飞行器自主飞行功能。
(2)MU (惯性测量单元),包含3轴加速度计、3轴角速度计和气压高度计,是高精度感应飞行器姿态、角度、速度和高度的元器件集合体,在飞行辅助功能屮充当极其重要的角色。
(3) GPS指南针模块,包含GPS模块和指南针模块,用于精确确定飞行器的方向及经纬度。
(4) LED指示灯模块,用于实时显示飞行状态,是飞行过程屮必不可少的,它能帮助飞手实时了解飞行状态。
4、飞行控制系统主要功能包括:(1)实现精准定位悬停飞行控制系统,由于配置有GPS指南针模块,可以实现锁定经纬度和高度的精准定位。
(2)智能失控保护/自动返航降落,飞行控制系统能自动记录返航点,当飞行过程屮,出现控制信号丢失,即无线遥控控制链路中断的情况,飞行控制系统能自动计划返航路线,实现自动返航和降落,使飞行或航拍更加安全可靠。
(3)低电压报警或自动返航降落(4)内置(两轴)云台增稳功能(5)可扩展地面站功能,飞行控制系统还可扩展成更加强大的地面站功能,从而实现超视距全自主飞行。
(6)智能方向控制,智能方向控制(IOC, Intelligent Orientation Control),分为航向锁定和返航点锁定,是一种为多旋翼飞行器量身定制的辅助方向控制功能。
(7)航向锁定,在使用航向锁定时,飞行前向和主控记录的某一时刻的机头朝向一致。
(8)返航点锁定,在使用返航点锁定时,飞行前向为返航点到飞行器的方向。
(9)热点环绕(POI),热点环绕(POI, Point of Interest)功能,在GPS信号良好的情况下,可以通过拨动遥控器上预先设置好的开关,将飞行器当前所在的坐标点记录为热点。
(10)断桨保护功能(六轴及以上的机型),断桨保护功能是指在姿态或GPS姿态模式下,飞机意外缺失某一螺旋桨动力输出时,飞机可以采用牺牲航向轴控制的办法,继续保持飞行水平姿态。
课程后记课上最后10分钟给学员演示功能的应用,取得很好的教学效果。
课程名称:多旋翼无人机操作基础授课教师:张海东课题飞行控制系统控制模式教学目标1、GPS姿态模式的操作飞行2、姿态模式的操作飞行3、手动模式的操作飞行教学重点三种飞行的操作方式的运用教材分析飞行模式下的正确认识和了解为本课重点教学方法讲授法授课类型新课课时四课时课程内容一、组织教学二、课前提问三、导入新课四、教学内容:1、GPS姿态模式,必须要有选配GPS模块,除了能自动保持飞行器姿态平稳外,还能具备精准定位的功能,在该种模式下,飞行器能实现定位悬停,自动返航降落等功能。