雷达使用手册
雷达设备使用说明书
雷达设备使用说明书一、产品概述雷达设备是一种用于探测目标的无线电技术设备。
它通过发射和接收电磁波来获取目标的位置、速度和其他相关信息。
本说明书旨在向用户提供关于雷达设备的详细操作指南,以便正确合理地使用该设备。
二、安全注意事项在使用雷达设备之前,请确保您已仔细阅读并理解以下安全注意事项:1. 严禁未经授权擅自拆卸设备,否则可能导致设备损坏或人身伤害。
2. 使用雷达设备时,请确保周围环境安全,并避免与其他无线电设备干扰。
3. 请避免接触雷达发射信号,以免对人体产生不必要的辐射。
4. 请将雷达设备放置在干燥、通风的环境中,并避免水或其他液体进入设备内部。
三、设备组成与功能雷达设备主要由以下组成部分构成:1. 发射器:负责发射电磁波。
2. 接收器:负责接收目标反射的电磁波,并将其转化为可读取的信号。
3. 显示屏:用于显示目标信息,如距离、速度等。
4. 控制面板:用于调节设备参数和功能。
四、操作指南以下是雷达设备的基本操作指南:1. 开机与关机:a) 将电源插头插入电源插座,并按下电源按钮启动设备。
b) 关机时,将电源按钮长按数秒,直到设备完全关机。
2. 参数设置:a) 使用控制面板上的按钮,可以设置雷达设备的工作模式、灵敏度等参数。
b) 根据实际需求,调节合适的参数以取得最佳效果。
3. 目标显示:a) 雷达设备会在显示屏上实时显示探测到的目标信息,如位置、速度等。
b) 通过观察显示屏上的图像,可以迅速判断目标的状态,并做出相应决策。
4. 数据保存:a) 雷达设备可通过连接外部存储设备,将探测到的数据进行保存和分析。
b) 按照设备说明书上的指引,进行数据的保存和导出操作。
5. 设备维护:a) 定期清洁设备表面,并确保无积尘或其他物质附着于设备上。
b) 如发现设备故障或异常,请立即停止使用,并联系售后服务。
五、故障排除以下是一些常见问题的排除方法:1. 无目标显示:a) 检查是否已正确连接设备的发射器和接收器。
激光雷达使用说明书

激光雷达使用说明书1. 简介激光雷达是一种高精度测量设备,能够通过发射激光束并接收反射激光来获取目标物体的三维空间信息。
本说明书将详细介绍激光雷达的使用方法和注意事项,以帮助用户正确操作并充分发挥其功能。
2. 基本操作2.1 连接电源将激光雷达与电源适配器连接,并确保电源开关处于关闭状态。
接通电源前,请确认电流和电压与设备要求相匹配。
2.2 连接计算机使用数据线将激光雷达与计算机相连,确保连接稳定且接口无松动。
在开始使用前,请确保计算机已经安装了相应的驱动程序和软件。
2.3 开机开启电源开关,并等待激光雷达启动完成。
此过程可能需要一段时间,请耐心等待。
2.4 调整参数根据实际需求,使用激光雷达的调试软件或命令行工具,对相应参数进行调整。
这些参数可能包括雷达角度、扫描速度、分辨率等等。
根据用户手册提供的参数说明,选择合适的数值进行设定。
3. 使用注意事项3.1 安全操作使用激光雷达时,请务必注意安全。
激光束具有一定的危险性,切勿直视激光束,并确保周围没有人员在工作区域内。
在操作过程中,应穿戴合适的防护眼镜,以防激光束对眼睛造成伤害。
3.2 环境适应性激光雷达对环境光线较为敏感,因此在使用时应尽量避免在明亮阳光下工作。
如果无法避免,可使用遮光罩进行防护。
3.3 镜头保护激光雷达的镜头具有高精度的测量功能,因此在使用过程中要注意保护镜头免受污损和刮伤。
使用时,应尽量避免触碰镜头,并在不使用时,使用相应的镜头保护盖进行保护。
3.4 清洁与维护定期检查激光雷达的清洁情况,并根据需要进行清洁。
使用干净柔软的布进行清洁,切勿使用有机溶剂或化学剂进行擦拭,以免损坏镜头或其他部件。
4. 故障排除在使用激光雷达过程中,可能会遇到一些故障情况。
以下是几种常见故障及其排除方法的简要介绍:4.1 数据传输故障如果在数据传输过程中出现错误或失败,请检查数据线是否连接良好,确保连接稳定。
同时,可尝试更换数据线或重新安装驱动程序。
航空雷达操作方法说明书
航空雷达操作方法说明书1. 操作前准备航空雷达操作前需检查设备是否正常工作,包括电源连接、天线设置、通信连接等。
确保雷达处于正常工作状态,以确保飞行安全。
2. 打开雷达启动雷达前,确保电源连接稳定,并按照设备说明书进行操作。
一般来说,按下电源开关,等待雷达启动自检完成。
3. 调整天线天线调整是保证雷达探测性能良好的重要环节。
按照设备指南调整天线方向和仰角,使其与飞机的水平线平行,以获得最佳的雷达返回信号。
4. 雷达校准雷达校准是确保雷达测量准确的关键步骤。
在校准之前,需确保雷达与导航系统连接正常。
根据设备说明书进行雷达校准,通常是通过输入目标经纬度或调整仪表盘上的设置来进行。
5. 调整显示范围根据飞行需求,调整雷达显示范围是必要的。
通过设备操作设置雷达显示范围,可以扩大或缩小显示的范围。
根据不同的飞行阶段,调整雷达显示范围有助于提高搜寻效率。
6. 监控雷达显示雷达显示界面通常提供雷达目标、天气雷达、地势信息等相关数据。
操作员应密切监控雷达显示,及时发现和识别空中目标、天气变化以及地势等信息。
根据飞行需求,调整显示方式,如切换不同的雷达模式或显示过滤设置。
7. 目标识别和跟踪航空雷达可以检测到空中目标,并提供其位置、高度、速度等信息。
操作员需要识别并跟踪这些目标,以确保飞行安全。
根据设备操作指南,在雷达显示上选择目标,通过设置雷达参数进行航空目标的识别和跟踪。
8. 检测天气航空雷达不仅可以探测空中目标,还可以检测天气情况,如降水、雷暴、云层等。
操作员需要密切监测雷达显示上的天气信息,并根据天气情况作出相应飞行调整。
根据设备操作指南,调整雷达显示,选择或过滤相关天气信息。
9. 故障处理在操作雷达过程中,可能会出现各种故障,如信号中断、显示异常等。
操作员需要根据设备说明书,参考故障处理指南,进行相应的故障排除。
必要时,及时与维修人员沟通,并按照其要求进行操作。
10. 关闭雷达飞行任务结束后,需关闭雷达设备。
雷达说明书

雷达说明书11 RADAR OPERATION雷达操作1.1 Turning on the Power开启雷达The [POWER] switch is located at the left corner of the control unit. Open the power switch cover and press the switch to turn on the radar system. To turn off the radar, press the switch again. The screen shows the bearing scale and digital timer approximately 30 seconds after power-on. The timer counts down three minutes of warm-up time. During this period the magnetron (transmitter tube) is warmed for transmission. When the timer has reached 0:00, the indication "ST-BY" appears at the screen center, meaning the radar is now ready to transmit pulses.电源键位于控制面板的左上角。
打开电源盖、按下打开电源。
再次按下关闭电源。
电源开启后30秒屏幕显示方位圈、电子计数器,计数器倒计时3分钟磁控管预热时间。
但计数器时间归零,屏幕中央显示“待机”,表示雷达已准备发射。
In the stand-by condition, markers, rings, map, charts, etc. are not shown. Further, ARP is cancelled and the AIS display is erased.在待机的情况下,标志、距标圈、海图等将不显示。
毫米波雷达产品手册
毫米波雷达产品手册
一、产品简介
毫米波雷达,采用毫米波频段的雷达技术,具有体积小、质量轻和空间分辨率高等优点。
本产品手册旨在为用户提供关于毫米波雷达的详细信息和使用指南。
二、产品特点
1. 高精度测距测速:采用先进的毫米波技术,实现高精度测距测速,适用于多种应用场景。
2. 小型化设计:体积小巧,易于集成到各种终端设备中,方便安装和使用。
3. 抗干扰能力强:毫米波具有较强的穿透能力和抗干扰能力,能够在复杂环境中稳定工作。
4. 可靠性高:采用高品质的元器件和严格的生产工艺,确保产品具有高可靠性和稳定性。
三、使用指南
1. 安装与接线
请遵循当地电力安全规范进行安装和使用,确保供电电源满足安全电压标准。
在建筑物安装接线中应装有易于拆卸的断开装置,电源线不要被碾压或踩踏。
2. 操作步骤
(1)打开电源开关,等待雷达启动;
(2)根据实际需求,通过控制面板或遥控器设置参数;
(3)开始检测,观察显示器或接收设备上的数据,确保正常工作。
3. 注意事项
(1)避免在强磁场或电场的环境中使用,以免影响测量精度;
(2)在潮湿、高温、低温等恶劣环境下使用时,应采取相应的防护措施;(3)定期进行设备维护和保养,保证设备的正常运行和使用寿命。
四、常见问题及解决方法
1. 雷达无法启动:检查电源是否正常,检查接线是否牢固。
2. 测量数据不准确:检查雷达是否正确对准目标,检查周围是否有干扰源。
3. 设备发热严重:关闭设备,待其冷却后再使用。
4. 设备故障:如有任何其他问题或故障,请及时联系我们的技术支持团队。
我们将竭诚为您服务。
雷达使用手册

道闸雷达安装调试手册目录一、前言 (3)二、产品概述 (3)三、雷达技术参数 (4)四、雷达安装规范 (5)五、接线定义 (5)六、雷达参数设置 (8)七、调试 (9)八、注意事项 (11)九、保修 (12)一、前言本手册适用于触发和防砸道闸雷达,以下将描述道闸雷达的安装、参数设置、调试以及注意事项,指导您正确安装和使用道闸雷达。
本雷达采用当今集成度最高的24G雷达单芯片收发方案,具有技术含量高、专业强的特性,使用前请仔细阅读产品安装调试手册。
二、产品概述2.1、工作原理道闸雷达是采用24-24.5GHz可调连续波(FMCW)和高速数字信号处理技术,通过计算接收的回波频率与发射频率之间的频率差来计算目标距离,经逻辑运算后执行外部控制和数据传输。
2.2雷达特点与应用▲本产品工作于24-24.5GHz频域区间,全天侯,不受任何气候环境的影响。
▲可完全替代“车辆检测器”,实现关闸和防砸功能,省掉了繁琐的切地感线圈工序。
降低人工成本。
▲可检测人体,或人体以上大小的非金属物体,可确保人员和物资在闸机下方的安全通行。
▲可用于触发检测,如触发摄像机抓拍。
▲可用于警戒区域报警触发器用。
▲有流量记录功能,断电不丢失数据。
2.3雷达天线HFSS仿真效果从上图可看出,要获得更窄的波束,可将雷达横向安装三、雷达技术参数1、输入电压:DC12V 150mA2、工作频率:24-24.5GHz3、调制模式:FMCW4、发射功率:10-15dBm5、波束与闸杆夹角:宽波<15°、窄波<12°6、检测距离:1-6米,±0.2米。
7、通讯方式:RS485 、波特率1152008、工作温度:-40℃~+85℃9、防护等级:IP6710、外型尺寸(长*宽*厚) 131mm*106mm*28.5mm四、雷达安装规范4.1触发雷达和防砸雷达均应垂直于车道方向安装,防砸雷达安装在自动闸杆下方的箱体上,触发雷达安装在雷达安装专用支架上,雷达中心距地面最佳高度为0.6m。
雷达操作手册827
2.点击右键显示SPEED菜单
3.选择1 SHIP SPEED
4.选择MANUAL
5.选择2 MANUAL SPEED
6.转动滚轮设置速度(也可以利用键盘数字键输入)
7.点击右键关闭菜单
1.14 Choo
所选量程、量程间隔和脉冲显示在屏幕左上角。当有目标靠近时,缩小量程,这样就可以在显示范围的50—90%里显示。
1.3 Control Uuit
有两种控制单元,一种是键盘,另外一种是遥控键盘.
1.4
1.按下[MENU]键,在屏幕右方显示以下文本框
MAIN MENU主菜单
1 [ECHO]回波处理功能
2 [MARK]打开/关闭时标
3 [ALARM]设置警戒报警功能;输出报警信号
4 [ARP/AIS]设置ARP和AIS功能
合适的脉冲已经在相应的量程和功能键设置好了,如果对默认的脉冲设置不满意,可按下列步骤重新设置:
1.15.1 Choosing pulselength
可以按下列步骤设置0.5—24nm的脉冲
1.把鼠标放在屏幕左边的PICTURE框
PICTURE框可根据预期使用来设置雷达图像,例如海港导航,长量程,短量程等,详细说明见1.33
5.按滚轮完成
6.按右键关闭菜单
1.12 Presentation
雷达有以下的显示模式
Relative Motion(RM)相对运动模式
Head—up船艏向上: Unstabilized不可控制
Head—up TB真方位:与罗经数值一样
Course—up航线向上:
North—up真北向上:
Stern--up
2.点击左键减少量程/右键增加量程.也可以通过滚轮来改变量程
furuno雷达说明书1.2

最初,雷达会沿用先前使用的量程和脉冲长度。
而其它设置(例如亮度水平、VRM、EBL 和菜单选项的选择)也会使用先前的设置。
[STBY/TX] 键(或 TX STBY 方框)在雷达的 STBY(待机)和 TRANSMIT(发射)状态之间来回切换。
在待机状态中,天线停转;在发射状态中,天线转动。
磁控管会随时间推移逐渐老化,导致输出功率降低。
强烈建议在雷达闲置时将其设置为待机,以延长使用寿命。
快速启动如果雷达刚刚使用过且发射管(磁控管)依然温热,您可以直接将雷达切换到TRANSMIT(发射)状态而无需进行三分钟的预热。
如果由于操作失误或类似原因导致 [PO WER] 开关关闭,您应该在断电后的 10 秒钟之内打开 [PO WER]开关以快速地重新启动雷达。
回波区域非 IMO雷达的回波显示区域可以使用三种配置:圆形、矩形和全屏。
您可以使用 ECHO(回波)菜单上的 7 ECHO AREA(7 回波区域)选择配置。
1-21.3 控制单元有两种控制单元:控制单元 RCU-014(完全键盘)和控制单元 RCU-105(掌上控制单元 RCU-014(完全键盘)控制单元 RCU-015(掌上控制)1-3控制说明1-41-51.4 主菜单从完全键盘或者操纵跟踪球,您可以进入 MAIN (主)菜单。
后面的章节中只给出使用跟踪球的菜单操作步骤。
操纵键盘的主菜单操作1. 按 [MENU] 键。
MAIN (主)菜单显示在屏幕右边的文本区域。
MAIN 菜单2. 按与您想要打开的菜单对应的数字键。
例如,按 [2] 键打开 MARK (标记)菜单。
MARK 菜单3. 按与您想要设置的项目对应的数字键。
4. 连续按步骤 3 中的同一数字键,选择合适的选项,然后按 [ENTER MARK](输入标记)键确认您的选择。
5. 按 [MENU] 键关闭菜单。
操纵跟踪球的主菜单操作1. 转动跟踪球,在屏幕右边选择 MENU(菜单)方框。
右下角的导视框(参阅下一页底部关于位置的例图)现在显示“DISP MAIN MENU”(显示主菜单)。
Molas B300测风激光雷达使用说明书

Molas B300测风激光雷达使用说明书V2.0南京牧镭激光科技有限公司NANJING MOVELASER CO.,LTD目录1安全信息 (3)1.1用户须知 (3)1.2安全标识 (3)1.3激光器安全等级 (4)2产品介绍 (4)2.1测风激光雷达工作原理 (4)2.2产品特点 (5)2.3应用领域 (5)2.4装箱清单 (6)2.5开箱及检查 (6)2.6运行环境 (7)2.7产品性能 (7)2.8整机尺寸图 (9)2.9系统结构 (9)2.10通信方案 (10)3供货安装(调试)方案 (11)3.1接到安装任务 (11)3.2现场勘查地点 (12)3.3雷达与安装材料运输到指定地点 (18)3.4系统安装 (19)3.5其他事项 (25)3.6采集数据归档 (25)4产品的使用 (26)4.1对外接口 (26)4.2设备安装 (28)2.12远程通信安装 (28)4.4温湿压传感器安装(选装) (30)4.5设备工作及客户端操作 (30)4.5设备防护 (36)4.7包装与运输 (36)4.8耗材说明 (37)4.9注意事项 (38)5常见故障排除及解决 (38)附录数据说明 (40)1概述 (40)2数据文件组成 (40)图1Molas B300数据文件组成 (40)2.1数据文件名 (40)2.2文件格式 (40)2.3数据格式 (41)图3数据文件头 (41)表1十分钟平均数据文件表格头 (42)表2秒级平均数据文件表格头 (43)3数据处理方法 (44)3.1秒级风速文件 (44)表3秒级数据文件摘要表 (44)表410min数据文件摘要表 (44)1安全信息感谢您选择牧镭激光公司Molas B300测风激光雷达产品,本用户手册为您提供了重要的安全、维护、操作及其他方面的信息。
故在使用该产品之前,请务必先仔细阅读本用户手册。
为了确保操作安全及设备的正常运行,请遵守以下注意和警告事项以及该手册中的其他信息。
koden雷达中文说明书MDC0191

koden雷达中文说明书MDC0191
一、按下PWR键,绿灯亮,3分钟后出现STANDBY,按下TX/STBY 键,雷达开始工作;再按TX/STBY可停止发射,设备在预备状态。
二、调整SEA、RAIN、GAIN和BRILL钮,选择RANGE量程,调节TURN钮至物标清晰出现在荧光屏上;SEA、RAIN和TURN分别有手动和自动,但是雨雪和海浪不能同时自动。
三、捕捉物标,按下ACQMANUAL键,移动光标到物标上,按下左键,物标被捕捉。
最多可捕捉50个物标。
四、读取物标数据,按下TGTDATA键,将光标移动到物标上,按下左键,物标数据被读取。
五、取消物标,按下ACQ/CANCEL键,将光标移动到物标上,按下左键,物标被取消。
六、设置方位线、距离圈,按下EBL和VRM键,荧光屏出现方位线、距离圈,旋转EBL和VRM钮,设置方位和距离。
七、按下AZI/MODE键,进行真北、真运动、相对运动等选择。
八、按下PL键改变发射脉冲宽度。
九、按下TRUE/REL、VECT/TIME键进行真矢量和相对矢量选择。
十、按下TM/RM键,进行真运动和相对运动选择。
十一、按下OFF/CENT键进行偏心显示。
十二、按下MENU键有9个子菜单。
CW、E系列雷达使用说明书

基本说明
CW 系列雷达彩色显示器参数表
尺寸
C90W
C120W
C140W
重量
C90W
C120W
C140W
安装方式
电源
环境: 温度 湿度 显示面板 分辨率 C90W
C120W C140W 可显示窗口
亮度 白天/夜晚模式 语言 系统警报类型
317x197x156mm(不包括支架,下同) 380x245x156mm 424x277x156mm 3.85kg 4.76kg 5.58kg 支架安装或嵌入控制台安装(详见安装手 册) 输入电压 10.7-32v DC(直流) 正负极安全绝缘 最大功耗: C90W 19W C120W 22W C140W 32W 外部安装要求防水等级 CFR46 -10°C 至+50°C 最高 95%,在 35°C 不结露 彩色 TFT LCD 800 x 480 像素(WVGA) 1280 x 800 像素(WXGA) 1280 x 800 像素(WXGA) 海图、雷达、渔探、CDI(航向监控显示)、 AIS(船舶自动识别系统)、发动机仪表 64 级调节 可选择屏幕亮暗以适应当时环境 可选取中文、美式英语、英式英语等 报警时钟、锚状态、抵港、深水、MOB、脱 离航线、浅滩、温度、定时
菜单系统选项粗体加黑字体为默认值方位模式纬度经度tdstd设置变化模拟器关闭打开自动演示功能方位模式真方位磁方位mob数据模式航位推测法位置变化航向自动手动手动变化范围030ew语言英式英语美式英语法语德语等扩展字符关闭打开设置复位将所有系统设置选项设置为工厂默认值设置及数据复位将系统复位包括鱼探仪但dsm不会系统复位日期时间设置见下面子菜单单位设置见下面子菜单系统连接见下面子菜单菜单系统选项粗体加黑字体为默认值日期格式时间格式12小时制24小时制当地时差utc时间13小时菜单系统选项粗体加黑字体为默认值距离单位海里英里千米速度单位英里千米深度单位英尺温度单位华氏度摄氏度菜单系统选项粗体加黑字体为默认值dsc信息显示打开关闭seatalk报警可用状态不可用隔离nmea船首数据用于防止nmea船首数据串扰进seatalk总线如使用marpa功能且有外接快速船首传感器时应关闭此功能打开关闭nmea输出设置apbbwcbwrdbtdptggagllmtwrmarmbrmcrsdrtettmvhwvlwvtgwplzda33显示器画面设置331显示器设置键调出主菜单
雷达测距仪使用方法说明书

雷达测距仪使用方法说明书一、产品简介雷达测距仪是一种用于测量距离的仪器,通过发射无线电波并接收其反射信号来计算目标物体与仪器之间的距离。
本使用方法说明书将详细介绍雷达测距仪的使用步骤、注意事项以及常见问题解答,以帮助用户正确、高效地使用本产品。
二、使用步骤1. 准备工作在使用雷达测距仪之前,请确保具备以下条件:- 电源:将雷达测距仪充电或插入电源适配器,并确保电池电量充足。
- 目标物体:选择需要测量距离的目标物体,并确保其表面平整,并无遮挡物。
2. 打开电源按下电源按钮并保持按压几秒钟,直到仪器开机并显示启动界面。
3. 设置参数使用仪器自带的操作界面,设置测距单位、测量精度以及其他参数,以满足实际需求。
4. 测量距离将雷达测距仪对准目标物体,按下测量按钮进行距离测量。
仪器将发射无线电波,并通过接收被测目标物体反射的波信号来计算距离。
5. 结果显示测量完成后,仪器将在显示屏上显示测得的距离数值。
在需要记录或使用结果时,请及时进行保存。
三、注意事项1. 安全使用- 避免在雷电活动、强电磁场或高温、潮湿等环境下使用本产品,以防止可能的故障或危险。
- 雷达测距仪可能对心脏起搏器等医疗设备产生干扰,请在这些设备附近谨慎使用。
2. 保养与维护- 雷达测距仪为精密电子设备,请轻拿轻放,避免强烈的冲击、振动和摔落。
- 定期清洁仪器表面,避免灰尘和污渍对其正常工作的影响。
3. 距离测量精度- 调整测量精度参数可影响测量结果的精度,根据具体需求进行设置。
- 在室外环境或多目标物体测量时,可能会出现测量误差,请根据实际情况进行使用和判断。
四、常见问题解答1. 无法开机或无显示- 确保电源按钮已正确按下并保持按压。
- 检查电池电量是否低或电源适配器是否连接正常。
2. 测量距离不准确- 检查目标物体表面是否有突出物或遮挡物影响测量结果。
- 调整测量精度参数,以增加测量精度。
3. 无法连接到其他设备- 确保其他设备与雷达测距仪之间的连接线正常插入,并检查连接接口是否干净。
jma-9110雷达中文说明书

jma-9110雷达中文说明书一,雷达调试和工作时需要注意的事项:1、在雷达工作期间不要接触雷达天线,收发波机和显示器内部,因为内部有高压,会造成危险。
2、由于雷达天线要旋转,所以人不要靠近它。
为了防止天线突然旋转打伤人,所以每次雷达开机时,必须了望雷达天线处是否有人。
当需要到天线上维修时,必须将天线安全开关设置在“0FP”位置。
3、由于雷达天线在发射时有高频辐射,在近距离辐射对人体有伤害,尤其是对人的眼睛,所以雷达天线必须安装在高于人的桅杆上。
当离开天线的中心面的距离小于下列数值时,对人体(尤其人的眼睛)有伤害:离NKE-1087/1089雷达天线0、6米(辐射功率强度:10瓦/平方米)离NKE-1079/1075A雷达天线1、1米(辐射功率强度:10瓦/平方米)如果离开NKE1079/1075A雷达天线25厘米处,它的辐射功率强度是非常大,辐射功率强度达到100瓦/平方米,它足以伤害人体(尤其是人的眼睛)。
调试前的工作:1、根据系统的配套检查设备安装的完整性和正确性,根据接线图检查接线的正确性以及检查雷达波导的两端插头制作的正确性和水密性。
在天线处,旋转一下天线检查天线转动是否灵活以及周围是否有物体碰天线。
特别提醒的一点:在收发机处的两根专用电缆是同一型号,必须要确准哪一根到天线:哪一根是到显示器,防止弄错,如果弄错会烧毁收发机内的印刷板部件。
2、检查配套设备(天线,收发机,显示器)的型号,确准使用的电压与船电一致。
3、根据提供给雷达的外部信号源(电罗经航向信号,GPS位置信号,计程仪速度信号和AIS信号等等)的形式是同步信号,步进信号,触点信号,还是数据信号(NMEA0183),来确定信号的接线端子。
4、对每一个设备内部作好清洁工作,特别要清除接线时遗留下来的金属物质。
否则在通电时会发生短路损坏机器。
SYH24A1 24G 毫米波雷达使用说明书

SY H24A1 24G毫米波雷达使用说明书一、原理毫米波雷达是通过雷达天线发射和接收电磁波,测量物体的运动幅度和位置的传感器。
通过算法解析后,来判断人体的呼吸,运动,人数,距离,方向等信息。
二、应用范围毫米波雷达不受温度、湿度、噪声、气流、尘埃、光照等影响,适合在恶劣环境中使用;适用于养老检测,酒店,民宿管理,办公室人员管理,闯入报警,道闸防撞,人数统计等需要测试运动状态的环境。
三、探测范围本雷达模组测量人体活动面积大约200平方米以内。
物体运动最大感知距离小于20米,测量呼吸距离为5米内。
雷达天线测量范围横向80°/纵向30°,云帆瑞达雷达模块通常是可以通过不同的算法,测量不同距离的产品。
图3-1 模组测量范围演示图片四、安装方式通过对不同探测距离以及不同运动幅度的监测,根据房间布局做出合适部署。
在室内时,安装在高处会有更好的体验效果,如空调,热水器,监控摄像头等设备的安装高度体验更佳。
1.水平安装方式水平安装时,站姿或者坐姿体态更利于监测。
适用于办公室,家电,道闸,客厅等空旷环境。
图4-1 水平安装方式检测图示雷达模组水平安装高度建议为1米~1.5米,雷达水平正向安装,安装倾角在正负5o以内,雷达模组正前方需无明显遮挡物及覆盖物,正对方向需尽量覆盖人体活动区域。
在该安装模式下,人体运动检测最大距离大于10米;人体静止检测最大距离约等于5米,一般有效距离作用距离为3~4米。
2.倾斜安装方式测量房间内人员运动,主要适用于酒店、大厅,庭院安防等环境。
图4-2 倾斜安装方式检测图示倾斜安装时高度建议为2-3米;雷达模组下视倾斜角度范围为10°~30°,模组正对方向需无明显遮挡物及覆盖物。
在该安装模式下,人体运动检测最大距离小于10米;人体静止检测最大距离小于5米,一般有效距离为3~4米。
该模式下,雷达正下方及邻近区域可能存在监视盲区,随着下视倾角增加,静态人体探测距离会明显缩短。
ltd2600探地雷达使用手册_概述及解释说明
ltd2600探地雷达使用手册概述及解释说明1. 引言1.1 概述本手册是针对LTD2600探地雷达的使用进行详细说明和解释的指南。
探地雷达是一种重要的地质勘察仪器,用于探测地下物体的位置、形状和性质。
本手册将提供有关该设备的介绍、操作步骤以及使用过程中需要注意的事项。
1.2 文章结构文章主要分为以下几个部分:引言、LTD2600探地雷达介绍、使用前的准备工作、LTD2600探地雷达的操作步骤以及结论与建议。
每个部分都会逐一介绍并深入讨论相关内容,以帮助读者全面了解和正确使用LTD2600探地雷达。
1.3 目的撰写本手册的目的是为了帮助用户更好地理解和操作LTD2600探地雷达。
通过阅读本手册,用户可以了解到该设备的基本原理、功能特点和技术应用领域,并能够按照正确步骤进行设备启动、数据采集与处理以及实时监测和显示功能操作。
此外,在结论与建议部分,我们还将总结使用体验并提供针对不同环境优化建议,同时展望探地雷达技术未来的发展趋势。
以上为“1. 引言”部分的内容,供参考。
2. LTD2600探地雷达介绍2.1 设备概述LTD2600探地雷达是一种高性能地质勘探设备,具有先进的技术原理和广泛的应用领域。
该雷达采用无线传输技术,能够在各种复杂的地质环境中快速、准确地检测地下目标,并提供可靠的数据分析结果。
2.2 技术原理LTD2600探地雷达基于电磁波传播和反射原理进行工作。
通过发射电磁波束并接收反射信号,它可以分析信号之间的时间差和强度变化,从而确定目标物体的位置、形状和性质。
该雷达使用了先进的数字信号处理算法,提供了出色的深度探测性能和高分辨率。
2.3 应用领域LTD2600探地雷达广泛应用于以下领域:1. 地质勘探:在石油、天然气等资源勘探中,LTD2600能够帮助寻找潜在的油气层或矿藏。
2. 建筑工程:在建筑施工前,使用LTD2600可以检测到潜在的地下障碍物,如管线、地下设施等,以避免施工事故和损失。
TF03 RS-485 RS-232 高频长距单点激光雷达用户手册说明书

TF03 RS-485 / RS-232高频长距单点激光雷达用户手册所述产品高频长距单点激光雷达:TF03 RS-485 / RS-232制造商公司:北醒(北京)光子科技有限公司地址:北京市海淀区上地信息产业基地创业路6号自主创新大厦3层3030 邮编100085版权声明法律信息本文档受版权保护。
其中涉及到的一切权利归北醒公司所有。
仅允许在版权法的规定范围内复制本文档的全部或部分内容。
未经北醒公司的官方书面许可,禁止对本文档进行修改、删减或翻译。
© 北醒公司版权所有原文档本文档是归北醒公司所有的原文件。
目录1关于此文档 (4)目标读者 (4)标志和文档协定 (4)2产品使用说明 (4)产品简介 (4)安全建议 (5)维护、服务和维修 (5)3产品介绍 (6)外观概述 (6)尺寸图 (6)技术规格 (7)4硬件接口及协议 (8)连接器引脚定义 (8)RS-232通讯 (9)RS-485通讯 (9)通信协议 (10)数据帧 (10)RS-485组网 (11)M ODBUS协议 (11)4.7.1协议说明 (12)4.7.2功能码 (12)4.7.3可访问寄存器地址及说明 (12)4.7.4Modbus常用指令 (13)5自定义配置 (14)协议描述 (14)常用协议 (15)指令编辑 (16)6可选配件 (16)自清洁模组 (16)指示光模组 (17)测试用延长线 (18)7快速测试指南 (19)连接测试 (19)初次使用排查指南 (20)测量模式 (20)测距影响因素 (21)8异常及故障排除 (24)9附录 (26)不同材质的反射率 (26)1 关于此文档用户使用手册是描述如何设置TF03和配置接口的操作说明。
用户使用手册包含关于TF03接口的详细信息,包括语法和可用功能,但未描述每种接口的基本技术背景。
输出结果格式的详述以及指令通道的内容和语法在对所有相关接口有效的附录中描述,由多个接口共享。
KLM 测量型激光雷达 使用说明书
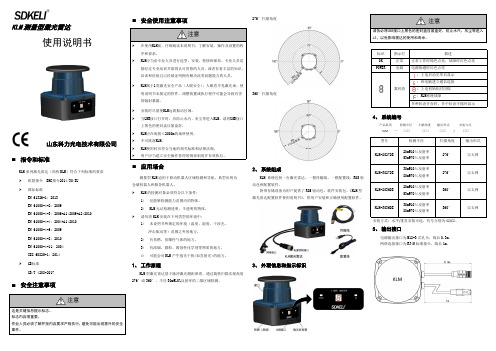
KLM 测量型激光雷达使用说明书山东科力光电技术有限公司⏹指令和标准KLM 系列激光雷达(简称KLM)符合下列标准的要求 欧盟指令EMC指令2014/30/EU国际标准EN 61326-1:2013EN 61000-4-2:2009EN 61000-4-3:2006+A1:2009+A2:2010EN 61000-4-4:2004+A1:2010EN 61000-4-6:2009EN 61000-4-8:2010EN 61000-4-11:2004IEC 60825-1:2014GB标准GB/T 4208-2017⏹安全注意事项注意⏹安全使用注意事项注意在使用KLM前,仔细阅读本说明书,了解安装、操作及设置的程⏹应用场合测量型KLM 适用于移动机器人区域检测和导航,典型应用为仓储机器人和服务机器人。
KLM 的检测对象必须符合以下条件:1)仅能够检测能力范围内的物体。
2)KLM 无法检测透明、半透明的物体。
请勿将KLM 安装在下列类型的环境中:1)本说明书所规定的环境(温度、湿度、干涉光、冲击振动等)范围之外的地方。
2)有易燃、易爆性气体的地方。
3)有浓烟、微粒、腐蚀性化学剂等物质的地方。
4)可能会对KLM 产生强光干扰(如直射光)的地方。
1、工作原理KLM 型激光雷达基于脉冲激光测距原理,通过旋转扫描实现角度276°或360°、半径30m@10%反射率的二维区域检测。
276°扫描角度360°扫描角度2、系统组成KLM 系统包括一台激光雷达、一根传输线、一根配置线、ROS 驱动包和配置软件。
附带存储设备为用户提供了ROS 驱动包、软件安装包、《KLM 型激光雷达配置软件使用说明书》,供用户安装和正确使用配置软件。
3、外观信息和指示标识请务必将USB接口上黑色的密封盖压紧盖好,防止水汽、灰尘等进入4、系统编号安装方式:水平/垂直安装可选,代号分别为SZ/CZ 。
雷达设备操作指南说明书

雷达设备操作指南说明书一、前言本操作指南是针对雷达设备进行的详细操作指导,旨在帮助用户正确有效地使用雷达设备。
请在使用前仔细阅读本指南,并按照指导进行操作,以确保设备的正常运行和精准探测。
二、设备概述雷达设备是一种利用无线电波进行目标探测和测距的高精度设备。
它可以广泛应用于民航、海事、军事等领域,用于目标探测、导航引导、防空作战等任务。
本设备操作指南适用于所有雷达设备,并包含了设备的基本组成部分和功能描述。
三、设备安装与连接1. 设备安装:a. 将雷达设备放置在平稳的工作台面上,确保设备稳定无晃动。
b. 检查设备周围环境,确保通风良好,无遮挡物。
c. 将天线与设备连接,确保连接牢固。
2. 电源连接:a. 将设备的电源线连接到电源插座,并确保连接稳固。
b. 检查设备电源指示灯是否正常亮起,确认设备已成功开启。
四、设备操作步骤1. 打开设备:a. 按下设备的电源开关,待设备启动完成。
b. 检查设备屏幕是否正常显示,确认设备已成功开启。
2. 设备校准:a. 进入设备菜单界面,选择校准功能。
b. 根据设备的校准指导,进行雷达设备的校准操作。
c. 完成校准后,检查校准结果是否正常,确保设备准确无误。
3. 设备参数设置:a. 进入设备菜单界面,选择参数设置功能。
b. 根据实际需求,设置设备的工作模式、灵敏度、范围等参数。
c. 确认设置完成后,保存参数并退出菜单界面。
4. 目标探测:a. 将设备放置在理想的探测位置,确保视野开阔。
b. 确保设备的天线正确对准目标区域。
c. 按下设备的开始探测按钮,等待设备完成探测。
d. 检查设备屏幕上的目标信息,进行分析和判断。
5. 数据处理与导出:a. 设备支持数据存储功能,可以将探测到的目标数据进行保存。
b. 根据需要,选择导出数据的格式和方式,如USB传输、网络传输等。
c. 将设备连接到指定的设备或网络,进行数据导出操作。
五、设备维护与保养1. 设备清洁:a. 关闭设备并断开电源,待设备完全停止工作。
北醒tf-luna雷达用户手册
北醒tf-luna雷达用户手册
北醒TF-Luna雷达用户手册
感谢您选择使用北醒TF-Luna雷达。
本用户手册详细介绍了该雷
达的使用方法和注意事项,请您在使用前仔细阅读并遵守相关指引。
1. 产品简介
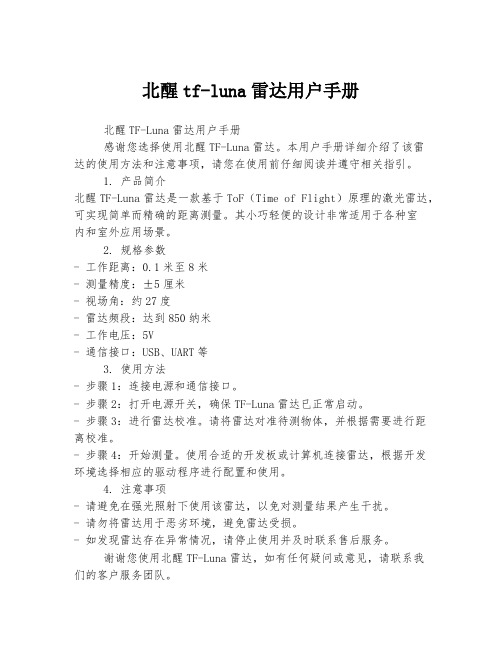
北醒TF-Luna雷达是一款基于ToF(Time of Flight)原理的激光雷达,可实现简单而精确的距离测量。
其小巧轻便的设计非常适用于各种室
内和室外应用场景。
2. 规格参数
- 工作距离:0.1米至8米
- 测量精度:±5厘米
- 视场角:约27度
- 雷达频段:达到850纳米
- 工作电压:5V
- 通信接口:USB、UART等
3. 使用方法
- 步骤1:连接电源和通信接口。
- 步骤2:打开电源开关,确保TF-Luna雷达已正常启动。
- 步骤3:进行雷达校准。
请将雷达对准待测物体,并根据需要进行距离校准。
- 步骤4:开始测量。
使用合适的开发板或计算机连接雷达,根据开发环境选择相应的驱动程序进行配置和使用。
4. 注意事项
- 请避免在强光照射下使用该雷达,以免对测量结果产生干扰。
- 请勿将雷达用于恶劣环境,避免雷达受损。
- 如发现雷达存在异常情况,请停止使用并及时联系售后服务。
谢谢您使用北醒TF-Luna雷达,如有任何疑问或意见,请联系我
们的客户服务团队。
北醒tf-luna雷达用户手册
北醒tf-luna雷达用户手册
摘要:
1.北醒tf-luna 雷达简介
2.北醒tf-luna 雷达的功能特点
3.北醒tf-luna 雷达的使用方法
4.北醒tf-luna 雷达的技术参数
5.北醒tf-luna 雷达的注意事项
正文:
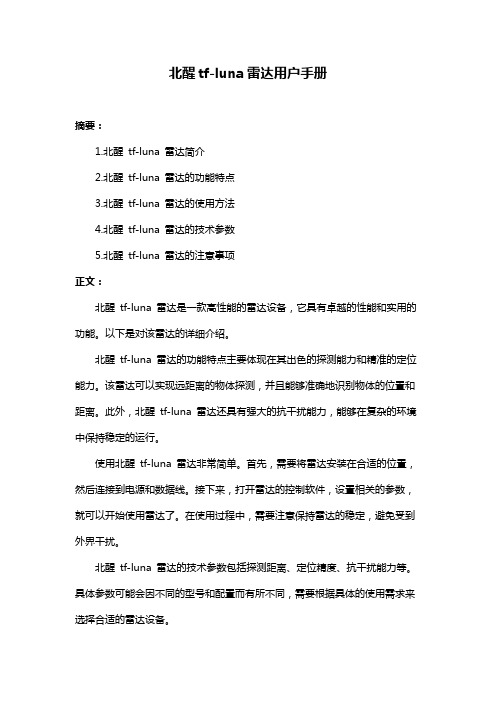
北醒tf-luna 雷达是一款高性能的雷达设备,它具有卓越的性能和实用的功能。
以下是对该雷达的详细介绍。
北醒tf-luna 雷达的功能特点主要体现在其出色的探测能力和精准的定位能力。
该雷达可以实现远距离的物体探测,并且能够准确地识别物体的位置和距离。
此外,北醒tf-luna 雷达还具有强大的抗干扰能力,能够在复杂的环境中保持稳定的运行。
使用北醒tf-luna 雷达非常简单。
首先,需要将雷达安装在合适的位置,然后连接到电源和数据线。
接下来,打开雷达的控制软件,设置相关的参数,就可以开始使用雷达了。
在使用过程中,需要注意保持雷达的稳定,避免受到外界干扰。
北醒tf-luna 雷达的技术参数包括探测距离、定位精度、抗干扰能力等。
具体参数可能会因不同的型号和配置而有所不同,需要根据具体的使用需求来选择合适的雷达设备。
在使用北醒tf-luna 雷达时,需要注意一些事项,比如避免雷达受到撞击或者摔落,保持雷达的清洁和干燥,避免雷达受到强烈的阳光或者雨水的侵蚀等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
道闸雷达安装调试手册
目录
一、前言 (3)
二、产品概述 (3)
三、雷达技术参数 (4)
四、雷达安装规范 (5)
五、接线定义 (5)
六、雷达参数设置 (8)
七、调试 (9)
八、注意事项 (11)
九、保修 (12)
一、前言
本手册适用于触发和防砸道闸雷达,以下将描述道闸雷达的安装、参数设置、调试以及注意事项,指导您正确安装和使用道闸雷达。
本雷达采用当今集成度最高的24G雷达单芯片收发方案,具有技术含量高、专业强的特性,使用前请仔细阅读产品安装调试手册。
二、产品概述
2.1、工作原理
道闸雷达是采用24-24.5GHz可调连续波(FMCW)和高速数字信号处理技术,通过计算接收的回波频率与发射频率之间的频率差来计算目标距离,经逻辑运算后执行外部控制和数据传输。
2.2雷达特点与应用
▲本产品工作于24-24.5GHz频域区间,全天侯,不受任何气候环境的影响。
▲可完全替代“车辆检测器”,实现关闸和防砸功能,省掉了繁琐的切地感线圈工序。
降低人工成本。
▲可检测人体,或人体以上大小的非金属物体,可确保人员和物资在闸机下方的安全通行。
▲可用于触发检测,如触发摄像机抓拍。
▲可用于警戒区域报警触发器用。
▲有流量记录功能,断电不丢失数据。
2.3雷达天线HFSS仿真效果
从上图可看出,要获得更窄的波束,可将雷达横向安装
三、雷达技术参数
1、输入电压:DC12V 150mA
2、工作频率:24-24.5GHz
3、调制模式:FMCW
4、发射功率:10-15dBm
5、波束与闸杆夹角:宽波<15°、窄波<12°
6、检测距离:1-6米,±0.2米。
7、通讯方式:RS485 、波特率115200
8、工作温度:-40℃~+85℃
9、防护等级:IP67
10、外型尺寸(长*宽*厚) 131mm*106mm*28.5mm
四、雷达安装规范
4.1触发雷达和防砸雷达均应垂直于车道方向安装,防砸雷达安装在自动闸杆下方的箱体上,触发雷达安装在雷达安装专用支架上,雷达中心距地面最佳高度为0.6m。
4.2、道闸机箱必须固定牢固,避免闸机工作时机箱晃动。
4.3、检测距离内,除闸杆外,不能有任何障碍物,例如路锥,隔离栏、指示牌之类等等。
4.4、检测距离范围内的环境改变后,请及时更新雷达背景。
(上图比例10:1,车道宽3米,触发距离4米)
4.5防砸雷达安装示意图:
五、接线定义
六、雷达参数设置
6.1、雷达主要参数一键快速设置
每设置一项参数后,雷达10秒后自动退出设置菜单,此时才能进行其它参数设置。
按下设置轻触开关,绿灯闪亮次数与设置功能对照表:
▲雷达背景更新
操作步骤:按下按键,待绿灯闪烁2次后快松开,此时绿色指示灯闪烁,直到背景更新完成后,绿灯进入正常工作指示状态。
(更新雷达背景时,请将道闸杆处在水平状态)
▲检测距离设置
重要说明:系统进入检测距离设置时:绿灯为按键状态指示灯。
红灯为距离状态指示灯,起始距离从1米开始累加,当设置的检测距离为1米时,红灯常亮,检测距离越长,红灯闪烁越快,以此循环。
操作步骤:按下按键,待绿灯闪烁4次后快松开,此时绿亮灭,红灯常亮(起始距离为1米),每按下一次按键时,被设检测
距离增加0.5米,有效设置距离在1-6米内循环,如下表所示:
(重要提示:观察红灯状态,当红灯常亮时,是按键次数归0的参考点,当前系统起始值为1米,然后记录按下按键次数以每次0.5米累加)
▲人车区分设置
操作步骤:按下按键,待绿灯闪烁6次后快松开按键,此时绿灯指示当前的人车区分设置状态,绿灯慢闪烁为人车不区分,绿灯快速闪烁为人车区分。
可通过按键循环切换人车区分参
数。
▲灵敏度设置
操作步骤:按下按键,待绿灯闪烁8次后快松开按键,此时绿灯指示当前的灵敏度状态,绿灯慢闪烁为低灵敏,绿灯常亮为中灵敏度,绿灯快速闪烁为高灵敏度。
可通过按键循环切换灵敏度参数。
(灵敏度设为高时,对应检测宽度为“宽”,灵敏度设为低时,检测宽度对应为“窄”。
▲初始化雷达
操作步骤:按下按键,待绿灯闪烁10次后快松开按键,此时雷达恢复到默认参数,绿色灯指示灯闪烁直至雷达背景更新完。
雷达恢复到默认参数如表:
▲设置应用场景(适用于触发和直杆防砸雷达)
操作步骤:按下按键,待绿灯闪烁12次后快松开按键,此时红灯亮为防砸模式,红灯灭为触发模式,可通过按键循环切换。
▲设置应用场景(适用于栏栅杆防砸雷达)
使用前请确认雷达型号是否支持栏栅道闸机
操作步骤:按下按键,待绿灯闪烁12次后快松开按键,
此时红灯闪烁为左固定模式,绿灯闪烁为右固定模式,可通过按键循环切换。
5.2雷达参数软件设置。
可通过雷达RS485端口经转换后连接到上位机“雷达设置工具”进行设置
波特率为115200 无校验位数据位8 停止位1
七、调试
7.1、请选用大于150MA的12V直流电源向雷达供电,选用道闸控制器12V直流电源输出端向雷达供电时,请核对其最大输出电流不小于150MA。
7.2、雷达上电调试操作
雷达每次上电后将自动记录背景杂波,此时红灯常亮,绿灯
闪烁表示正在自动校准,请确保雷达自动校准过程中,雷达照射范围内没有物体通过,自动校准完毕后,绿灯停止闪烁,雷达进入正常工作态。
参数手动设置步骤:如果下表中的默认内容符合现场需求,
7.3、现场环境人车区分测试
第一步:人车区分测试:
将闸杆升起,人体进入雷达检测区域,雷达绿灯不亮,人体离开雷达检测区域后不自动关闸。
车辆通过入雷达检测区域时,绿灯亮,车辆离开检测区域后,绿灯灭,闸机自动关闸。
第二步、防砸人测试:
遥控关闸,在闸杆下落过程中,人体靠近闸杆,此时雷达绿灯亮,闸杆抬起,人体离开后闸杆下落(注意保证人体与闸杆的安全距离,防砸人测试成功后,则无需测试防砸车功能)。
(目前雷达版本采用电磁波能量密度高的天线设计方案,电磁波束窄,在防跟车上有优越性能,所以允许雷达在约1.5米范围内检测人体,如有调整,本手册不作修改)
八、注意事项
8.1、通常情况下请按杆长来设检测距离,检测距离距稍小于或等于杆长,以防闸杆外有人员或物体通过而被雷达检测;如果雷达对面有大面积反射物如墙面时,设置检测距离应小于实际通道宽度0.5米以上。
8.2、雷达无法完成背景更新,绿灯一直闪烁。
原因为车道范围内有运动目标,或者是检测距离大于车道宽度,车道外有运动物体,请解除运动目标,或断电重启后重新正确设置检测距离再更新背景。
8.3、雷达背景更新完成后,雷达工作一段时间出现车道内无车辆,但雷达绿灯亮,继电器有输出。
原因为雷达背景有较大的环境改变,请重新更新雷达背景,同时检查设置的检测距离是否超过车道宽度。
8.4、应用于5米以上超宽车道时,车辆通过闸机时车辆与道路的夹角越大,由于车身存在镜面反射因素,雷达接收反射回的电磁波越少,雷达检测性能越差。
建议通过路锥引导车辆驶,使车辆与道路夹角度小于30度(触发场景同理)。
九、产品保修
9.1、本产品因质量问题可免费7天包换,保修1年。
9.2、下列情况造成的产品故障不在保修之列:
9.2.1、使用环境或条件不当,如电源不合格、环境温度超出产
品上限而导致产品故障。
9.2.2、由于事故、误操作、或人为拆卸而造成的故障或损坏。
(注:可编辑下载,若有不当之处,请指正,谢谢!)。