基于PLC机械手控制系统设计任务书
基于PLC机械手控制系统设计

精品-----江苏农林职业技术学院毕业设计(论文)SNL/QR7.5.4-3 基于PLC机械手控制系统设计专业: 数控设备应用与维护学生姓名: 石宇峰班级: 1班学号: 201110170111指导教师: 孙昌权完成日期: 2014年05月24日成绩评议毕业设计(论文)任务书指导教师意见评阅教师意见答辩小组评议意见基于PLC机械手控制系统设计摘要:可编程控制器是一种以微处理器为核心的工业控制装置。
它采用了可编程序的存储器,可以在其内部存储执行逻辑运算、顺序控制、定时器、计数器和算术运算等操作的指令,并通过数字式、模拟式的输入输出,控制各种类型的设备或生产过程。
可编程控制器结构简单、操作方便、可靠性高、通用灵活、体积小、使用寿命长,在汽车、钢铁、航空航天、船舶、化工、纺织、食品、造纸、军工等工业领域获得了广泛的应用。
机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械自动化生产过程中发展起来的一种新型装置,在生产过程中起着非常重要的作用。
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。
自从机械手问世以来,相应的各种难题迎刃而解。
机械手能代替人类完成危险、重复、枯燥的工作,减轻人类劳动强度,提高劳动生产力,因此机械手得到了越来越广泛的应用。
关键词可编程控制器;机械手;组态王Manipulator based on PLC control system designAbstract:Programmable controller is a microprocessor as the core of the industrial control device. It uses the programmable memory, can be in its internal storage to perform the logic operation, sequence control, timer, counter and arithmetic operation instruction, and through the digital and analog input and output, the control various types of equipment or the production process. Programmable controller simple structure, convenient operation, high reliability, general flexible, small volume, long service life, in car, steel, aerospace, ship, chemic al, textile,food, paper making, war industry and so on field has been widely used.Manipulator is in automatic production process use a crawled and mobile workpiece function of automatic device, it is in the mechanical automation production process developed a kind of new type device, in the process of production plays a very important role. In industrial production and other domains, Because of the demands of the work, people were usually subjected to endanger of heat, decay and poisonous air etc factor, these factors increased the strength of worker's labor, even endanger life. Since the manipulator was born, the various difficult problems were easily solved. Robots can replace human consummately danger, repeat the boring work, ease human labor intensity and improve labor productivity, so robots have been applied more and more.目录前言 01.可编程控制器PLC (1)1.1 PLC简介 (1)1.2 PLC结构 (1)1.2.1 结构简图 (1)1.2.2 PLC硬件系统 (2)1.3 PLC的工作原理 (3)1.4 PLC的特点 (3)1.5 PLC的主要功能 (4)1.6 PLC的经济分析 (4)1.7 PLC发展状况及趋势 (5)1.8 PLC选择及论证 (5)2.机械手 (7)2.1机械手简介 (7)2.2机械手的结构 (7)2.3 机械手的分类 (7)2.4机械手的特点 (8)2.5 机械手的发展趋势及其应用 (8)2.6机械手选择 (9)2.7控制方式的分类 (10)2.8操作方式 (10)2.8.1手动操作方式 (10)2.8.2自动操作方式 (10)2.9控制要求 (10)3.机械手控制系统硬件设计 (12)3.1 系统控制流程图 (12)3.2 I∕O分配表 (13)3.3 接线图 (13)4.机械手控制系统的软件设计 (14)4.1 软件设计和梯形图 (14)4.2 模拟调试 (16)4.3 组态王软件 (16)4.3.1.使用组态王实现控制系统实验仿真的基本方法 (16)4.3.2使用组态王软件开发具有的特点 (16)4.3.3采用组态王开发系统编制应用程序过程中要考虑三个方面 (17)4.4 创建一个工程的一般过程 (17)4.5 机械手控制系统组态的建立 (17)4.5.1 定义新画面 (17)4.5.2 定义I∕O设备 (19)4.5.3 构造数据库 (21)4.5.4 创建动画连接 (22)4.5.5 运行和调试 (22)4.5.6 动态分辨率转换 (23)5. PLC机械手的程序调试 (24)5.1控制系统的程序调试步骤 (24)5.2 调试过程中要注意的事项 (24)参考文献 (25)致谢 (26)前言在现代工业中,生产过程的机械化、自动化已成为突出的主题。
机械手控制系统设计任务书
机械手控制系统设计任务书机械手控制系统设计:(一)硬件系统:1.机械手结构设计:在控制系统的设计之前,需要先按需求对机械手结构进行设计和优化,负责机械手运动部分的设计和制造,保证机械手的精确性和可靠性。
2.电控系统设计:需要根据机械手结构和实际的工况确定电控系统的构成,包括传动系统、电控部分、解码控制部分和安全保护部分等,使电控系统能够实现匌合的驱动和控制功能。
3.控制系统软件设计:负责控制系统软件移植、设计、测试和调试,控制系统软件要求正确性,可靠性,实时性和高效率,确保机械手的正确运行。
系统软件以C语言编程实现,采用模块化的设计方法和结构化的程序编写。
(二)系统功能:1.平滑运动:控制机械手能够实现连续搬运,快速搬运和精确搬运三种运动模式,保证搬运过程中的平滑和准确。
2.避障功能:系统实现避障技术,当机械手遇到障碍物时能够及时反应,采取合适措施保护物料和机械手本身,防止意外碰撞危害。
3.重复定位:控制系统采用联锁机制进行重复定位,确保物料正确定位,预防物料受到外力的影响而产生的误差。
4.加速减速:机械手通过控制系统实现加速,减速和精确调速等,以满足机械手需要的运动精度和变速率要求。
(三)系统试验:1.总体试验:控制系统在完成设计编程后,应进行总体试验,确定其正确性和可靠性,测试的内容应包括电源调试、触摸屏调试、电机调试以及操作模式的测试等。
2.精度测试:对机械手系统的精度进行测试,检查其是否符合要求,以保证物料的正确搬运。
3.运行状态测试:在负载和行程范围内,检测机械手的运行状态,从而确保机械手能够正常运行搬运物料。
4.振动测试:检查机械手是否存在振动情况,以确保机械手搬运物料的准确性。
基于PLC的机械手控制系统设计任务书

基于PLC的机械手控制系统设计任务书任务书设计目标:设计一个基于PLC的机械手控制系统,能够实现对机械手的精确控制和操作。
系统能够完成各种复杂的任务,如物料的搬运、装配和堆垛等。
设计要求:1.系统应具备自动化控制功能,能够通过PLC对机械手进行控制。
2.系统应支持多种控制模式,如手动控制、自动控制和远程控制等。
3.系统应能够实现对机械手各个关节的精确控制,保证操作的准确性和稳定性。
4.系统应具备自诊断和故障检测能力,能够对机械手的状态进行实时监测和报警。
5.系统应具备良好的反应速度,能够快速响应用户的指令和要求。
6.系统应采用可靠的通信协议和接口,能够与其他设备和系统进行数据交互。
7.系统应具备良好的人机交互界面,易于操作和使用。
8.系统应具备扩展性和可升级性,能够满足未来的需求和变化。
设计内容:1.系统硬件设计:a)选择适合的PLC控制器和电机驱动器,满足系统要求。
b)设计机械手的结构和传动装置,考虑机械手的工作范围和载荷要求。
c)选择合适的传感器和执行器,用于机械手的位置检测和动作执行。
d)设计电源和电气控制部分,提供稳定可靠的电力供应。
e)设计安全保护装置,确保系统和人身安全。
2.系统软件设计:a)编写PLC控制程序,实现机械手的各种动作和控制模式。
b)设计人机交互界面,使操作人员能够方便地对机械手进行控制和监测。
c)实现系统的自诊断和故障检测功能,能够及时发现和排除故障。
d)设计远程控制和数据交互功能,使系统能够与其他设备和系统进行联动。
3.系统测试和验收:a)对系统进行各种功能和性能测试,确保系统能够满足设计要求。
b)进行系统集成测试,验证系统与其他设备和系统的接口和兼容性。
c)完成系统的文档编写和培训,使用户能够方便地使用和维护系统。
d)按照用户需求和要求进行现场验收和调试,确保系统正常运行。
4.系统实施和推广:a)根据用户需求和场地情况,对系统进行布局和安装。
b)组织人员进行系统使用和维护培训,使用户能够熟练使用系统。
1.毕业设计(基于PLC的自动搬运机械手系统设计)任务书1

本科毕业设计(论文)任务书
题目名称
基于PLC的自动搬运机械手系统设计
学生姓名
邹钟
专业班级
机械0802
学号
200840123
题目来源
□教师科研 ■社会实践□实验室建设 □其它
题 目 类 型
□理论研究□应用研究
■设计开发 □其它
选题背景及意义
PLC技术广泛应用于工业过程控制系统,在自动化生产线中自动自动搬运机械手系统是典型的机电一体化系统。通过该题目使学生充分了解工业过程控制的结构原理以及PLC技术应用,加强机械结构设计技术与PLC技术的综合应用。
组长签字: 年 月 日
学生接受任务签字
接受任务时间: 年 月 日
学生签名:
你还很年轻,将来你会遇到很多人,经历很多事,得到很多,也会失去很多,但无论如何,有两样东西你绝不能丢弃。一个叫良心,一个叫理想。
[2]张波.多功能上下料用机械手液压系统[J].
[3]李允文.工业机械手设计[M].北京机械工业出版社.1996
[4]张建民.工业机械人[M].北京:北京理工大学出版社.1992
[5]史国生.PLC在机械手步进控制中的应用.中国工控信息网,2005
JI
指导教师
签 字
教师姓名:
年 月 日
系部
审核
审核意见:
2011年12月:查阅相关资,熟悉相关知识,搭建论文总体框架;
2012年1月:按任务书要求进行具体设计;
2012年2月:完成论文初稿;
2012年3月:论文完善并递交正式论文;
2012年4月:预答辩,正式答辩。
主要参考文献
[1]菜自兴.机器人的发展趋势和发展战略[J].机器人技术与应用.2001.76(4):11-16
机械手PLC控制系统设计任务书
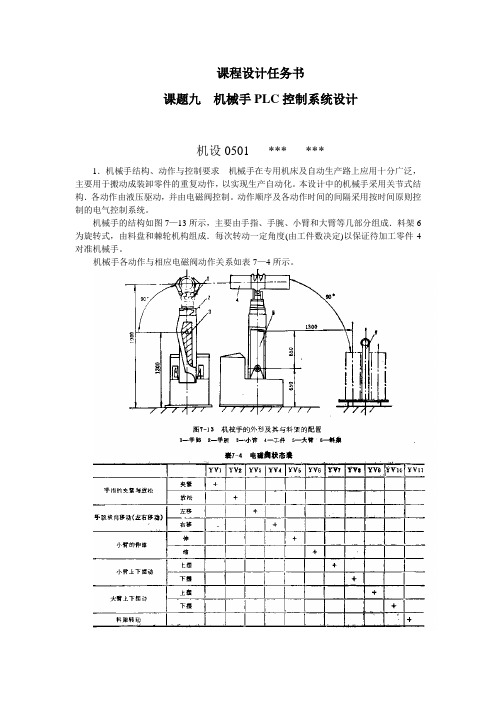
课程设计任务书课题九机械手PLC控制系统设计机设0501 *** ***1.机械手结构、动作与控制要求机械手在专用机床及自动生产路上应用十分广泛,主要用于搬动成装卸零件的重复动作,以实现生产自动化。
本设计中的机械手采用关节式结构.各动作由液压驱动,并由电磁阀控制。
动作顺序及各动作时间的间隔采用按时间原则控制的电气控制系统。
机械手的结构如图7—13所示,主要由手指、手腕、小臂和大臂等几部分组成.料架6为旋转式,由料盘和棘轮机构组成.每次转动一定角度(由工件数决定)以保证待加工零件4对准机械手。
机械手各动作与相应电磁阀动作关系如表7—4所示。
以镗孔专用机床加工零件的上科、下科为例,机械手的动作顺序是:由原始位置将已加工好的工件卸下,放回料架,等料架转过一定角后,再将来加工零件拿起,送到加工位置,等待镗孔加工结束,再将加工完毕工件放回料架,如此重复循环.具体动作历序是:原始位置(装好工件等待加工位置,其状态是大手臂竖立,小手臂伸出并处于水平位置,手腕横移向右,手指松开)→手指夹紧(抓住卡盘上的工件)。
→松卡盘→手腕左移(从卡盘上卸下已加工好的工件)→小手臂上摆→大手臂下摆→手指松开(工件放回料架)→小手臂收缩→料架转位→小手臂伸出→手指夹紧(抓住末加工零件)→大手臂上摆(取送零件)→小手臂下摆→手指右移(将工件装到机床的主轴卡盘中)→卡盘收紧→手指松开,等待加工。
根据表7—4及各动作中机械的状态,列出各动作中对YV1—YV11线圈的通电要求。
2.设计要求1)加工中上科、下料各动作采用自动循环。
2)各动作之间应有一定的延时(由时间继电器调定)3)机械手各部分应能单独动作,以使于调整及维修。
4)油泵电机(Y100L2-4.3KW)及各电磁阀运行状态应有指示。
5)应有必要的电气保护与联锁环节.3.设计任务1)设计并绘制电气原理图(继电器设计),选择电器元件,编制元件目录表。
2)PLC设计,PC选择及I/O的分配,根据控制要求设计必要的硬件系统,绘制梯形图、编写程序。
基于PLC的机械手控制系统设计任务书

基于PLC的机械手控制系统设计任务书任务书任务名称:基于PLC的机械手控制系统设计任务背景:机械手是现代工业自动化生产中的重要设备,可广泛应用于汽车制造、电子产品组装、物流分拣等领域。
机械手控制系统是机械手运动的核心,其稳定性和精确性对生产效率和产品质量有着重要影响。
PLC(可编程逻辑控制器)是一种功能强大的工业控制器,能够实现复杂的逻辑运算和实时控制,因此被广泛应用于机械手控制系统中。
任务目标:本任务的目标是设计一套基于PLC的机械手控制系统,实现对机械手的精确控制和稳定运动。
具体目标包括:1.设计机械手控制系统的硬件构架,包括PLC、传感器、执行器等的选择和连接。
2.实现机械手的运动控制算法,包括位置控制、速度控制和力控制等。
3.开发人机界面(HMI)程序,实现对机械手控制的可视化操作界面。
4.进行系统仿真和实际测试,验证控制系统的性能和稳定性。
任务内容:1.调研机械手的工作原理和市场上已有的PLC控制方案,了解相关技术和设备的特点和应用范围。
2.设计机械手控制系统的硬件构架,选择适合的PLC型号和相关的传感器、执行器等设备,并进行接线和连接的设计。
3.开发机械手运动控制算法,包括位置控制、速度控制和力控制等方面,保证机械手的稳定性和精确性。
4.开发人机界面(HMI)程序,实现对机械手运动的监控和控制,包括机械手的起停、位置调整等功能。
5.进行系统仿真和实际测试,验证机械手控制系统的性能和稳定性,并对系统进行优化和改进。
任务要求:1.完成机械手控制系统设计和开发的各个环节,保证系统的功能完整和性能稳定。
2.设计文档和代码要规范、清晰,能够有效地指导后续的优化和维护工作。
3.进行充分的系统测试,保证控制系统的稳定性和精确性,并及时修复和改进系统中的问题。
4.完成任务后,撰写详细的任务报告,包括任务设计、开发过程、测试结果等内容。
预期成果:1.机械手控制系统的设计文档和代码,包括硬件连接图、运动控制算法和HMI程序等。
基于PLC的机械手控制系统设计任务书

黄石理工学院毕业设计(论文)任务书毕业设计(论文)题目: 基于PLC的机械手控制系统设计教学院:专业班级:学生姓名:学号:指导教师:刘东汉1.毕业设计(论文)的主要内容采用可编程控制器设计一个机械手控制系统,控制机械手实现工件的搬运过程。
左上作为原点,工件按下降、夹紧、上升、右移、下降、放松、上升、左移的次序依次运行。
机械手传送工件系统示意图见下图1。
图1 机械手传送工件系统示意图毕业设计(论文)的主要内容:1. 收集机械手资料、调研;2。
掌握PLC的应用及仿真软件、编程软件的应用;掌握触摸屏编程软件应用;3. PLC的选择,I/O点分配,画出I/O接线图;4. 控制系统的电路设计、调试;5. 系统程序设计调试;2.毕业设计(论文)的要求1.画出 PLC 端子接线图及控制梯形图。
2. 系统操作方式可选。
可在“手动”、“自动”、“回原点"中进行操作。
3. 左上作为原点,工件按下降、夹紧、上升、右移、下降、放松、上升、左移的次序依次运行,实现工件的传送。
4.下降/上升、左移/右移中使用双螺线管的电磁阀,夹紧使用的是单螺线管的电磁阀.3.进度安排4.其他情况说明A、题目开始实施后,每周集中一次,并且严格考勤,检查进度,协调事项,进行组内讨论,解答问题.B、要求有统一的毕业设计笔记本,定期检查。
C、利用实验室现有的设备,进行逐步设计及调试。
5.主要参考文献[1]范永胜王岷编著。
电器控制与PLC应用 [M]. 中国电力出版社,2004[2] 邹金慧编著. 可编程序控制器原理及应用 [M]。
云南科技出版社,2002[3] 朱寅生编著。
可编程控制器原理与应用 [M]。
华南理工大学出版社,2003[4] 王兆义编著.可编程序控制器实用技术[M]。
机械工业出版社,2002[5] 常斗南,李金利,张学武编著.可编程续控制器原理、应用、实验[M].机械工业出版社,1998[6]廖常初编著.PLC编程及应用[M].北京:机械工业出版社,2004.[7] 陈立定编著.电器控制于可编程控制器[M].广州:华南理工大学出版社,2001.[8] 袁任光编著.可编程序控制器应用技术与实例[M].广州:华南理工大学出版社,2003.[9] 陈世利编著。
基于PLC的物料分拣机械手控制系统设计-任务书

《基于PLC的物料分拣机械手控制系统设计》毕业设计指导书毕业设计是工科大学生最后一个十分重要的学习环节,是理论教学和实践相结合的一个实践过程,是进行工程师基本训练的重要手段。
本设计课题主要实现由PLC控制机械手按照要求进行物料分拣的目的。
通过本课题的研究,使学生了解机械手控制系统的工作原理,掌握PLC的硬件及软件的设计,锻炼学生综合运用基本理论知识解决工程设计问题的能力,使实际动手能力得到进一步的提高;培养学生从事科学研究所具有的勇于探索刻苦钻研精神。
一、毕业设计的题目、任务和要求1.题目及人员:设计题目:《基于PLC的物料分拣机械手控制系统设计》设计人员:2.任务:(1)物料自动分拣装置是模拟自动化工业生产部分过程的微缩模型,是由供料单元、机械手搬运单元和分拣单元组成;(2)工作中的机械手主要对各种信号和当时的状态进行综合分析,再确定下一个工作状态,为此它要求具有检测物料位置,抓举物料,检测物料并根据要求将物料放入相应料槽,报警,复位等功能。
(3)设计控制系统的总体方案,并根据总体方案对PLC进行选型,确定系统的硬件组成,完成系统的模拟试验装置的设计;(4)控制系统全部功能在模拟装置上调试通过,编制系统的PLC梯形图(5)总结相应不足及需要完善的部分。
3.目的、要求(1)验证所学理论;(2)掌握综合运用所学知识分析、解决实际问题的一般方法。
;(3)培养分析问题、解决问题和独立工作的能力;(4)通过毕业实习、毕业设计及毕业答辨全过程的训练,加强老师与学生之间、学生与学生之间知识的相互交流,互相渗透,培养学术研讨的好学风;(5)要求同学们以满腔的热情、科学的态度,严谨的作风、•高度的责任感从事毕业设计工作;不得敷衍了事、马马虎虎、得过且过;提倡周密思考、大胆创新,反对死搬硬套、墨守陈规;提倡共同研究,反对相互抄袭;(8)要求遵守作习时间,遵守学校的各项规章制度,确保毕业设计顺利地、高质量地完成。
二、毕业设计的一般步骤和基本内容1.收集并整理设计所需原始资料,为确定设计方案做准备;2.有针对性地复习掌握可编程控制器的基本工作原理。
机械手PLC自动控制系统的设计毕业设计任务书

浙 江 工 业 职 业 技 术 学 院毕 业 设 计(论 文)任 务 书分 院 电气工程分院电气工程分院专 业 电气自动化技术 班 级 学 生 学 号 指导教师 陈 怀 忠一、一、 课题名称: 机械手PLC 自动控制系统的设计自动控制系统的设计二、 内容和要求:控制要求控制要求工件台A 、B 上工件的传送不用PLC 控制控制;;机械手要求按一定的顺序动作机械手要求按一定的顺序动作,,启动时启动时,,机械手从原点开始按顺序动作从原点开始按顺序动作..停止时停止时,,机械手停止在现行工步上机械手停止在现行工步上,,重新起动时重新起动时,,机械手按停止前的动作继续进行。
动作继续进行。
为满足生产要求,为满足生产要求,机械手设置手动工作方式和自动工作方式两种,机械手设置手动工作方式和自动工作方式两种,而自动工而自动工作方式又分为单步、单周和连续工作方式。
作方式又分为单步、单周和连续工作方式。
1.1.手动工作方式。
利用按钮对机械手的每一步动作单独进行控制,手动工作方式。
利用按钮对机械手的每一步动作单独进行控制,手动工作方式。
利用按钮对机械手的每一步动作单独进行控制,例如按“上升”例如按“上升”例如按“上升”按钮,按钮,机械手上升;按“下降”按钮,机械手下降。
此种工作方式可使机械手置原位机械手上升;按“下降”按钮,机械手下降。
此种工作方式可使机械手置原位. .2.2.单步工作方式单步工作方式单步工作方式..从原点开始从原点开始,,按自动工作循环的工序按自动工作循环的工序,,每按一下起动按钮每按一下起动按钮,,机械手完成一步的动作后自动停止步的动作后自动停止. .3.3.单周期工作方式单周期工作方式单周期工作方式..按下起动按钮,从原点开始,机械手按工序自动完成一个周期的动作后,停在原位。
后,停在原位。
4.4.连续工作方式。
机构在原位时,按下起动按钮,机构自动连续的执行周期动作。
当按连续工作方式。
机构在原位时,按下起动按钮,机构自动连续的执行周期动作。
PLC课程设计机械手电气控制系统设计

《PLC技术与工程应用》课程设计任务书课题名称:机械手电气控制系统设计专业班级:电气自动化技术102班河南机电高等专科学校自动控制系2012-06-011、概述机械手是工业生产过程中常见的自动化设备,它具有工件的自动取拿、移动和输送功能。
机械手机构控制涉及了PLG传感器、电机驱动等技术。
机械手实验设备如图1所示。
该设备可以实现手臂的左右摆动、伸出与退回、上下移动、机械手指的夹紧与张开等四自由度动作。
图1.机械手实验设备1.1输出驱动单元该设备四自由度动作由四台直流电动机驱动,每台电动机可进行正反转运行。
左右摆动由齿轮组啮合实现减速传动;伸出与退回、上下移动由直流减速电机驱动丝杠--螺母结构完成;机械手指的夹紧与张开由直流减速电机驱动连杆结构实现。
该设备共有8个动作,由控制器输出信号驱动。
1.2输入检测单元每个自由度运行极限位置设置了两个行程开关,用于判断当前动作是否到位。
该设备共有8个行程开关作为控制器的输入信号2、输入输出接口电路介绍机械手实验设备既是所谓控制对象,对于一般工业控制,其控制核心使用可编程控制器(PLC)。
设计输入输出接口电路(如图2所示)的目的是为解决机械手设备输出驱动单元、输入检测单元与PLC之间的信号接口问题。
图中上层电路板是驱动电路板,下层电路板左侧是输入接口电路板,右侧是输出接口电路板<图2.输入输出接口电路板2.1输入接口电路板输入接口电路板原理图如图3所示,其功能是将设备上行程开关的开关状态转换为统一的电平信号(逻辑1:24V DC ;逻辑0: 0V DC)。
板上设有光电隔离电路,将内外电源隔离,以保护设备安全。
FLC輸人模块图3.输入接口电路板电气原理图本设备8个输入信号,对应输入接口电路板的8根输入信号线。
各信号线对应的行程开关如表1所示。
表1.2.2输出接口输出接口(如图4所示)由两块电路板构成:驱动电路板和输出接口电路板。
它们的功能是将PLC输出的控制信号用于驱动继电器动作,从而控制电动机正向或反向运行。
基于PLC的机械手控制系统设计

WORD文档下载可编辑目录摘要 (Ⅰ)ABSTRACT (Ⅱ)第1章绪论 (1)1.1课题背景 (1)1.2研究目的及意义 (2)1.3国内外研究现状 (2)第2章方案设计 (4)2.1 PLC的分类 (4)2.2 PLC的结构及基本配置 (7)2.3 PLC的选择 (8)2.4 机械手的分类和选择 (9)第3章硬件设计 (10)3.1 PLC控制机械手设计步骤 (10)3.2 系统控制示意图 (10)3.3 确定输入输出 (11)3.4 输入和输出点分配表 (11)3.5 PLC控制机械手接线图 (12)第4章软件设计 (13)4.1 PLC概述 (13)4.2 软件系统 (13)4.3 PLC的编程语言的基本指令系统和编程方法 (14)4.4 欧姆龙CX-Programmer编程软件 (14)4.5 PLC控制机械手的流程图 (15)结论 (16)致谢 (17)参考文献 (18)附录第1章绪论随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要求。
由于微电子技术和计算软、硬件技术的迅猛发展和现代控制理论的不断完善,更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化地结合。
机械手一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。
机械手的广泛使用,不仅可以提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。
1.1课题背景可编程控制器(简称PLC)是一种数字运算操作的电子系统,专为在工业环境应用而设计的。
它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
自二十世纪六十年代美国推出可编程逻辑控制器(Programmable Logic Controller,PLC)取代传统继电器控制装置以来,PLC得到了快速发展,在世界各地得到了广泛应用。
完整版)基于plc的机械手控制系统设计

完整版)基于plc的机械手控制系统设计机械手由机械结构、控制系统和执行器三部分组成。
机械结构是机械手的基本骨架,包括机械手臂、手爪等组成部分。
控制系统是机械手的大脑,负责控制机械手的运动和操作。
执行器是控制系统的输出部分,负责执行控制系统的指令,驱动机械手完成各种动作。
机械手的组成部分相互协调,共同完成机械手的工作任务。
2 PLC控制系统简介2.1 PLC概述PLC是可编程控制器的简称,是一种专门用于工业自动化控制的通用控制器。
它以微处理器为核心,具有高可靠性、强抗干扰能力、良好的扩展性和灵活性等特点。
PLC广泛应用于工业生产中的自动化控制领域,如机械制造、化工、电力、交通、冶金等行业。
2.2 PLC控制系统组成PLC控制系统主要由PLC主机、输入输出模块、编程软件和人机界面组成。
PLC主机是PLC控制系统的核心,负责控制整个系统的运行和实现各种控制功能。
输入输出模块负责将外部信号转换为PLC可以处理的数字信号,并将PLC输出信号转换为外部可控制的信号。
编程软件用于编写PLC程序,实现控制系统的各种功能。
人机界面是PLC控制系统与用户之间的接口,用于实现人机交互,方便用户对控制系统进行操作和监控。
3 基于PLC的机械手控制系统设计3.1系统设计思路本文设计的基于PLC的机械手控制系统主要由PLC控制系统、步进电机驱动系统和机械手组成。
PLC控制系统负责控制机械手的运动和操作,步进电机驱动系统负责驱动机械手的运动,机械手负责完成各种动作任务。
系统设计采用模块化设计思路,将系统分为PLC控制模块、步进电机驱动模块和机械手运动模块,分别进行设计和实现,最后进行整合测试。
3.2系统设计方案PLC控制模块采用西门子PLC作为控制核心,通过编写PLC程序实现机械手的控制和操作。
步进电机驱动模块采用步进电机驱动器和步进电机组成,通过PLC控制信号驱动步进电机实现机械手的运动。
机械手运动模块由机械结构、执行器和传感器组成,通过步进电机驱动器驱动执行器完成机械手的各种动作,通过传感器检测机械手的运动状态并反馈给PLC控制系统。
基于plc的机械手控制系统设计(毕业设计)

Xinyu University毕业设计(论文)基于PLC的机械手控制系统设计学生:何友良学号:1201231016专业:电气工程及其自动化指导教师: 富珍副教授学院:电气与电子工程•新余独创性声明本人重声明:所呈交的毕业设计(论文)是本人在指导教师指导下进行的研究工作及取得的研究成果。
其中除加以标注和致的地方,以及法律规定允许的之外,不包含其他人已经发表或撰写完成并以某种方式公开过的研究成果,也不包含为获得其他教育机构的学位或证书而作的材料。
其他同志对本研究所做的任何贡献均已在文中作了明确的说明并表示意。
本毕业设计(论文)成果是本人在新余学院期间在指导教师指导下取得的,成果归新余学院所有。
特此声明。
作者签名(手写):签名日期:年月日使用授权书本毕业设计(论文)作者及指导教师完全了解新余学院有关保留、使用毕业设计(论文)的规定,有权保留并向国家有关部门或机构送交毕业设计(论文)的复印件和磁盘,允许毕业设计(论文)被查阅和借阅。
作者签名(手写):指导教师签名(手写):日期:年月日日期:年月日论文题目:基丁PLC的机械手控制系统设计专业:电气工程及其自动化学生:何友良指导教师:富珍副教授摘要随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋丁恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。
工人工作环境和工作容也要求理想化简单化,对丁一些往复的工作由机械手远程控制或自动完成显得非常重要。
这样可以避免一些人不能接触的物质对人体造成伤害,如冶金、化工、医药、航空航天等。
在机械制造业中,机械手应用较多,发展较快。
目前主要应用丁机床、模锻压力机的上下料以及焊接、喷漆等作业,它可以按照事先制定的作业程序完成规定的操作,有些还具备有传感反馈能力,能应付外界的变化。
应用机械手,有利丁提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。
基于PLC的机械手控制设计(毕业设计)
基于PLC的机械手控制设计(毕业设计)
毕业设计题目:基于PLC的机械手控制设计
设计目标:
设计一个基于PLC的机械手控制系统,能够实现机械手对物体的抓取和放置操作。
设计内容:
1. 硬件设计:选择合适的PLC控制器,根据机械手的结构和控制需求,设计电路和连接方式,包括传感器、执行器、驱动器等硬件组成部分。
2. 软件设计:编写PLC程序,实现机械手的控制逻辑。
包括对机械手运动轨迹的规划、抓取力度的控制、异常情况的处理等功能。
3. 通信设计:如果需要与其他设备或系统进行通信,设计与外部设备的接口和通信协议。
4. 安全设计:考虑机械手在工作过程中可能出现的危险情况,设计安全机制,如急停按钮、防碰撞装置等。
5. 用户界面设计:设计一个简明易懂的用户界面,方便用户对机械手进行操作和监控。
6. 系统测试和调试:对设计的控制系统进行测试和调试,保证系统的稳定性和可靠性。
7. 性能评估和改进:对设计的控制系统进行性能评估,分析系统的优点和不足,并提出改进方案。
8. 文档编写:编写毕业设计报告,包括设计方案、实施过程、测试结果和分析等内容。
预期成果:
1. 完整的机械手控制系统,能够准确抓取和放置物体。
2. 可靠的硬件设计和稳定的软件程序。
3. 安全可靠的系统设计,能够防止意外事故的发生。
4. 用户友好的界面设计,简化操作流程。
5. 毕业设计报告和相关文档。
基于PLC机械手控制系统设计任务书

基于PLC机械手控制系统设计任务书毕业论文(设计)任务书论文(设计)题目专业学生姓名贺装志班级教研室指导教师起止时间敖章洪(或外聘单位)2023年12月15日至2023年5月15日建筑电气教研室自07103班号基于PLC的机械手控制系统设计学202316010323毕业论文(设计)任务、目的与基本要求:毕业设计课题任务:设计机械手控制系统,包括硬件电路和软件编程。
硬件电路主要由PLC,机械手,电机及其他相关部分构成,软件编程包括PLC流程图,梯形图和程序。
机械手是工业生产中常用的进行水平/垂直位移的机械设备,它的动作由气缸驱动,气缸又由相应的电磁阀控制。
控制系统如采用传统的继电接触控制,机械触点多,接线复杂,因而控制装置体积很大,并且故障率高,可靠性差,动作精确度低。
PLC以中央处理器为核心,综合了计算机和自动控制等先进技术,具有可靠性高、功能完善、组合灵活、编程简单、功耗低等优点。
使用PLC的自动控制系统体积小,可靠性大大提高,故障率大大降低,动作精度高,因此该课题具有实际意义。
通过设计,让学生将所学的知识综合运用,了解本专业在社会中的一些应用,提高学生专业外语水平,增加他们的见识,增强他们的动手能力、创新能力和综合分析能力,学会专业软件的应用,能熟练的使用计算机,提高学生检索资料的能力,养成良好的学习习惯和严谨的工作作风,为今后的学习生活打下良好的基础。
设计基本要求:一、技术要求:1、设计方案可行;2、机械手能进行前后左右移动;3、有半自动工作方式和手动工作方式,当位于手动工作方式时,用按动按钮去控制机械手动作;当位于半自动工作方式时,在机械手处于原位情况下,按动起动按钮,机械手就能自动完成一个循环过程并停在原位待命;4、有能力的可以对系统进行仿真;5、整个系统能够稳定运行。
二、文本要求:1、论文结构合理,条理分明;2、电路图绘制正确,排版美观;3、撰写开题报告与调研报告,格式与要求要符合规定;4、撰写毕业设计报告,要求用打印稿,论文格式必须使用学校的统一模板。
电气控制与plc课程设计任务书坐标式机械手控制的课程设计
电气控制与PLC课程设计坐标式机械手控制的设计学院:专业:机械设计制造及其自动化班级:学号:、、姓名:电气控制与PLC课程设计任务书2020-2021 学年第2 学期学生姓名学号专业机械设计制造及其自动化班级题目名称坐标式机械手控制的设计一、课程设计任务和要求根据图1所示的坐标式机械手原理图,利用PLC设计一个坐标式机械手的控制系统,具体要求:将物体从位置A搬到位置B1.动作顺序:机械手从原点位置起始下移至A处下限位→从A处夹紧物体后上升至上限位→右移至右限位→机械手下降至B处下限位→将物体放置在B处后→上升至上限位→左移至左限位(原点)为一个循环;2.上限、A、B下限、左限、右限分别由限位开关控制;机械手设立起动和停止开关;3.机械手夹紧或松开的工作状态以及到达每一个工位时,均应有状态显示;4.机械手的夹紧和松开动作均应有1s延时,然后上升;机械手每到达一个位置均有0.5s的停顿延时,然后进行下一个动作;5.若机械手停止时不在原点位置,可通过手动开关分别控制机械手的上升和左移,使之回到原点;6.要求循环120次后自动停止工作并警铃报警。
图1 坐标式机械手原理图设计摘要随着微电子技术和计算机技术的迅速发展,PLC(即可编程控制器)在工业控制领域内得到十分广泛地应用。
PLC是一种基于数字计算机技术、专为在工业环境下应用而设计的电子控制装置,它采用可编程序的存储器,用来存储用户指令,通过数字或模拟的输入/输出,完成一系列逻辑、顺序、定时、记数、运算等确定的功能,来控制各种类型的机电一体化设备和生产过程。
本文介绍了S7-200PLC的坐标式机械手的控制系统,利用PLC程序控制机械手实现流水作业。
本设计采用西门子公司S7-200系列,CPU224型PLC进行试验,运用GX WOrks 2编程软件进行编程。
主要功能是循环的将物件从A地运往B地。
该装置涵盖了可编程控制技术,位置控制技术,检测技术等。
由PLC接收来自外部的输入信号(包括开关机、限位指令、传感器信号指令等),并控制双线圈二位电磁阀来控制机械手的夹紧或松开。
基于PLC的装配气动机械手控制系统任务书

(4) PLC 电气控制系统设计及分析; (5)系统调试结果。
三、毕业设计(论文)成果 毕业设计论文 1 份(不少于 20 页,A4 纸,小四、宋体)。
对课题进行深入研究,并设计出机械系统、位置检 测系统、气动控制系统、 PLC 电气控制系统等。
进行对所设计的系统进行进一步分析,进行 PLC 控制系统的程序设计与调试。
整理材料,撰写论文。
2011/6/1—2008/6/10 论文答辩。
五、其他
六、参考资料 [1] 王鑫.PLC 机电控制系统应用设计[M].电子工业出版社出版.2008 年 7 月 [2] 袁中凡.机电一体化技术.电子工业出版社出版.2006 年 8 月 [3] 王兆安.电力电子技术.机械工业出版社.2003. [4] 张洪润.传感器原理及应用,清华大学大学出版社.2008 年 7 月 [5] 陈刚.机电一体化技术[M].清华大学出版社.2010 年 3 月 [6] 钟肇新,可编程序控制器原理及试验.华南理工大学出版社.2002 年 [7] 陈宇,段鑫.可编程序控制器原理及试验.国防大学出版社.2003 年 [8] 张建民.机电一体化系统设计.高等教育出版社.2001 年 [9]常晓玲.电气控制系统与可编程控制器.机械工业出版社.2004 年 [10]李乃夫.可编程序控制器原理、应用、试验.中国轻工业出版社.2003 年
四、毕业设计(论文)进程计划
起讫日期
工作内容
备注
2011/2/21—2010/4/15 熟悉课题内容,并查找相关资料,撰写开题报告。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、技术要求:
1、设计方案可行;
2、机械手能进行前后左右移动;
3、有半自动工作方式和手动工作方式,当位于手动工作方式时,用按动按钮去控制机
械手动作;当位于半自动工作方式时,在机械手处于原位情况下,按动起动按钮,机械手就能自动完成一个循环过程并停在原位待命;
4、有能力的可以对系统进行仿真;
[5]王丽伟,刘轩.机械手的PLC控制[J].机床电器,2006,33(3),34-35,49
[6]白云生,鄢光辉.PLC在机械手自动控制系统中的应用研究[J].科技资讯,2006,12,13-14.
[7]黄赞.PLC在工业机械手控制系统改造中的应用[J].机床与液压,2005,7,196-197,151
毕业论文(设计)任务书
论文(设计)题目
基于PLC的机械手控制系统设计
学生姓名
贺装志
专业
班级
自07103班
学号
200716010323
指导教师
敖章洪
教研室
(或外聘单位)
建筑电气教研室
起止时间
2010年12月15日至2011年5月15日
毕业论文(设计)任务、目的与基本要求:
毕业设计课题任务:设计机械手控制系统,包括硬件电路和软件编程。硬件电路主要由PLC,机械手,电机及其他相关部分构成,软件编程包括PLC流程图,梯形图和程序。
5、整个系统能够稳定运行。
二、文本要求:
1、论文结构合理,条理分明;
2、电路图绘制正确,排版美观;
3、撰写开题报告与调研报告,格式与要求要符合规定;
4、撰写毕业设计报告,要求用打印稿,论文格式必须使用学校的统一模板。
主要参考文献与资料:
[1]常斗南.可编程序控制器原理应用实验(第二版)[M].北京:机械工业出版社,2005.
毕业论文(设计)进度安排:
1.学生调研、开题、系统规划设计
2010.12.15~2010.12.30:调研、开题、系统规划设计,包括设计课题实际应用考察、收集查阅文献、方案拟定,撰写调研报告、开题报告、翻译课题相关外文资料、系统框图及设计课题各部分技术资料收集与初步实施;
(2010.12.31学院进行开题报告检查)
2.学生毕业设计初步
2010.12.31~2011.2.28:(毕业设计课题各部分研究、实施方案、硬件电路设计、软件设计、算法设计等);
3.学生毕业设计论文初稿
2011.3.1~2011.3.31:(毕业设计课题各部分研究、实施方案、硬件电路设计、软件设计、算法设计等论文及其它材料提交初稿);
(2011.3.22~2011.3.31:中期检查材料提交,中期检查报告,学校中期检查);
4.学生毕业设计论文正稿
2011.4.1~2011.5.13:总体设计、实验室总调试;毕业设计报告修订、提交、毕业答辩申请及准备;
6.学生毕业设计答辩:2011.5.14~2010.5.15
课
题
申ቤተ መጻሕፍቲ ባይዱ
报
与
审
查
指导教师(签名):2013年月日
教研室主任(签名):2013年月日
系主任(签名):年月日
[2]朱善君等.可编程序控制器[M].北京:清华大学出版社,1992
[3]白传悦.装配机械手PLC控制系统[J].可编程控制器与工厂自动化(PLC FA),2006,5,134-136
[4]丁筱玲,赵立新.PLC在机械手控制系统上的应用[J].山东农业大学学报:自然科学版,2006,37(1),105-108
机械手是工业生产中常用的进行水平/垂直位移的机械设备,它的动作由气缸驱动,气缸又由相应的电磁阀控制。控制系统如采用传统的继电接触控制,机械触点多,接线复杂,因而控制装置体积很大,并且故障率高,可靠性差,动作精确度低。PLC以中央处理器为核心,综合了计算机和自动控制等先进技术,具有可靠性高、功能完善、组合灵活、编程简单、功耗低等优点。使用PLC的自动控制系统体积小,可靠性大大提高,故障率大大降低,动作精度高,因此该课题具有实际意义。通过设计,让学生将所学的知识综合运用,了解本专业在社会中的一些应用,提高学生专业外语水平,增加他们的见识,增强他们的动手能力、创新能力和综合分析能力,学会专业软件的应用,能熟练的使用计算机,提高学生检索资料的能力,养成良好的学习习惯和严谨的工作作风,为今后的学习生活打下良好的基础。