基于CAN总线的语音通信系统
CANopen协议CAN总线的通信协议
CANopen协议CAN总线的通信协议CANopen协议是一种广泛应用于现代工业自动化领域的通信协议,它基于CAN总线技术,为设备之间的通信提供了一套规范和标准化的方式。
本文将介绍CANopen协议的基本原理、通信对象和通信过程。
一、CANopen协议的基本原理CANopen协议是建立在CAN总线之上的,因此首先需要了解CAN总线的基本原理。
CAN总线是一种多主机、多从机的串行通信系统。
它采用差分信号传输的方式,具有低成本、抗干扰能力强、可靠性高等特点。
CANopen协议基于CAN总线,定义了一系列的对象字典和通信服务,用于设备之间的数据交换和控制。
设备可以根据对象字典的内容来读取和写入数据,也可以通过通信服务来实现不同设备之间的通信。
二、CANopen协议的通信对象CANopen协议定义了丰富的通信对象,包括节点、对象字典和数据类型等。
其中,节点是CANopen网络中的实体,可以是主控节点或从节点。
主控节点负责整个网络的管理和控制,而从节点则负责执行具体的任务。
对象字典是CANopen协议的核心,它存储了设备的参数、状态和控制信息等。
对象字典中的每个对象都有一个唯一的标识符,用于标识该对象的类型和属性。
通过读取和写入对象字典中的数据,设备之间可以进行数据交换和共享。
CANopen协议还定义了一系列的数据类型,如布尔型、整型、实型和字符串型等。
这些数据类型可以用于描述设备的各种参数和状态,同时也可以作为通信对象的数据格式。
三、CANopen协议的通信过程CANopen协议的通信过程可以分为以下几个步骤:1. 初始化:CANopen网络在启动时需要进行初始化,包括网络配置、节点配置和通信参数的设置。
2. 启动:主控节点向从节点发送启动命令,从节点根据接收到的命令进行初始化和配置,并报告自身的状态。
3. 数据传输:设备之间通过读取和写入对象字典来进行数据的传输。
主控节点可以向从节点发送读取或写入对象的命令,从节点则根据命令进行相应的操作并回复结果。
can通信流程

can通信流程CAN(Controller Area Network)是一种先进的实时通信协议,广泛应用于汽车、工业控制和航空领域等。
下面将详细介绍CAN通信的工作原理和通信流程。
CAN通信是基于多主/多从的总线式通信系统,由控制器、传感器、执行器等节点组成。
每个节点都通过CAN控制器与总线相连接,通过CAN 总线进行信息的传递和交互。
CAN通信的基本流程如下:1.初始化:系统上电后,每个节点的CAN控制器需要进行初始化,包括设置CAN总线的工作模式、波特率以及接收和发送缓冲区等。
2.确定通信参数:各节点需要约定通信的ID、数据格式、信息长度等通信参数,以确保节点之间的信息交互是有效的。
3.发送数据:节点通过CAN控制器将要发送的数据封装成CAN帧,并通过CAN总线发送出去。
CAN帧包括帧起始位、ID、数据、帧检验位等。
4.接收数据:其他节点通过CAN控制器监听总线上的CAN帧,当有CAN帧到达时,进行接收。
每个节点通过识别CAN帧的ID来判断是否是自己所需要的数据,如果是,则进行数据解析,否则将其丢弃。
5.确认发送:发送节点接收到其他节点发送的数据后,会发送一个确认帧,表示自己已经成功接收到该数据。
6.错误处理:CAN总线具有自动差错检测和纠错能力,如果在通信过程中出现了错误,例如数据丢失、位错误等,节点会根据错误类型进行纠正或重新发送。
总的来说,CAN通信的流程是通过CAN控制器进行数据的封装、发送和解析,节点之间通过CAN总线进行数据的传递和交互。
每个节点根据CAN帧的ID来判断是否需要接收数据,并对接收到的数据进行解析和处理。
通过不断的发送、接收和确认,实现节点之间的实时通信。
CAN通信具有高可靠性、高带宽、抗干扰等特点,适用于多节点、多任务的控制系统。
在汽车领域中,CAN通信可以实现车载电子控制单元(ECU)之间的信息交换,提高汽车的安全性和可靠性。
而在工业控制领域,CAN通信可以连接分散的传感器和执行器,实现实时的数据交互和控制。
基于CAN总线的设计

CAN总线的特点:
CAN总线有如下基本特点: (1)多主站依据优先权进行总线访问。 总线开放时,任何单元均可开始发送报文,具有最高优先权的报 文的单元赢得总线访问权。 利用这个特点可以用液晶显示器作为多主 机的公用监视器,不用每台主机配一个监视器,从而节约系统成本。 (2)无破坏性的基于优先权的仲裁。 网络上的每个主机可以同时发送,哪个主机的数据可以发送出去 取决于主机所发送报文的标识符决定的优先权的大小,没有发送出去 的帧可自动重发。 (3)借助接收滤波的多地址帧传送 收到报文的标识符与本机的接收码寄存器与屏蔽寄存器相比较, 符合的报文本机才予以接收。
CAN总线的特点:
(4)远程数据请求。 网络上的每个接点可以发送一个远程帧给另一个接点,请求该接 点的数据帧,该数据帧与对应的远程帧以相同的标识符ID命名。 (5)配置灵活性 通过八个寄存器进行接点配置,每个接点可以接收,也可以发送 (6)全系统数据相容性 (7)错误检测和出错信令 有五种错误类型,每个接点都设置有一个发送出错计数器和一个 接收出错计数器。发送接点和接收接点在检测到错误时,出错计数器 根据一定规则进行加减,并根据错误计数器数值发送错误标志(活动 错误标志和认可错误标志),当错误计数器数值大于255时,该接点 变为“脱离总线”状态,输出输入引脚浮空,既不发送,也不接收。
CAN于汽车车窗智能控制系统上的应用:
各节点单元相关命令和状态通过CAN控制器以报文格式由CAN 总线完成与其他节点单元信息间的传输和共享。 • 其中报文的发送由CAN控制器遵循CAN协议规范自动完成。首 先CPU必须将待发送的数据按特定格式组合成一帧报文,进入CAN控 制发送缓冲器中,并置位命令寄存器中的发送请求标志,发送处理可 通过中断请求或查询状态标志进行控制。其发送程序分发送远程帧和 数据帧两种,远程帧无数据场。 报文的接收程序负责节点报文的接收 以及总线关闭、错误报警、接收溢出等其他情况处理。报文的收发主 要有中断接收方式和查询接收方式。 •
基于CAN总线的煤矿语音广播系统设计

基于CAN总线的煤矿语音广播系统设计基于传统语音广播的局限性,以以太网和CAN总线等技术为支撑的双向广播调度系统在煤矿广播中的作用越来越突出。
文章以以太网和CAN总线等技术为支撑,从系统总体架构、硬件、软件等方面进行煤矿广播系统设计,为煤矿安全生产提供了保障。
标签:煤矿语音广播系统;CAN总线;音频编解码我国是人口大国,能源需求量较大,煤炭作为传统的能源在新能源崛起过程中仍占较大比例。
我国煤炭资源开采主要在地下进行作业,不安全因素较多,人员和财产安全得不到有效的保障。
随着国家对煤炭安全的重视,煤矿广播系统等煤矿通信系统在煤矿安全生产中的作用越来越突出,是井上井下间相互交流的重要保障,有助于调度中心在危机情况下进行人员调度,进而保障人员安全[1~3]。
随着科学技术的不断发展,煤矿各个领域与现代化信息技术的结合越来越密切,煤矿广播系统已经朝着网络集成、智能化等方向发展,为及时防止煤矿危险事故的发生、安全事故中有效指挥人员撤离提供了保障。
传统语音广播已经退出历史舞台,以太网和CAN总线相结合的网络数字语音传播系统在煤矿广播中的作用不断凸显[1~3]。
文章以以太网和CAN总线等技术为支撑,从系统总体架构、硬件、软件等方面进行煤矿广播系统设计,为煤矿安全生产提供了保障。
1 关键技术煤矿广播系统在井上井下的交流中起着重要作用,是调度中心进行井下指挥的重要方式。
IP网络广播等广播技术具有资源占用大、布线存在盲区等缺点,使得这部分广播技术在实际中逐渐被CAN总线等通讯方式取代。
以太网和CAN总线等关键技术是煤矿广播系统设计的关键[1,3]。
1.1 工业以太网以太网作为一种分组交换局域网技术在20世纪70年代后迅速发展,以太网与光线技术的结合使“光以太网”出现在人们的眼前,提升了数据传输技术。
工业以太网是以太网在管理领域和工业控制领域的应用,是通信中的重要方式。
工业以太网是面向生产过程的,因此,工业以太网作为一种全开放性和数字化的网络,具有成本低、支持多种语言、信息共享能力强、通信率高、发展潜力大等特点,在工业企业综合自动化系统中的执行制造层、管理决策层以及现场设备层都有应用。
基于CAN总线的煤矿语音广播系统设计
基于CAN总线的煤矿语音广播系统设计作者:李华来源:《科技创新与应用》2017年第05期摘要:基于传统语音广播的局限性,以以太网和CAN总线等技术为支撑的双向广播调度系统在煤矿广播中的作用越来越突出。
文章以以太网和CAN总线等技术为支撑,从系统总体架构、硬件、软件等方面进行煤矿广播系统设计,为煤矿安全生产提供了保障。
关键词:煤矿语音广播系统;CAN总线;音频编解码我国是人口大国,能源需求量较大,煤炭作为传统的能源在新能源崛起过程中仍占较大比例。
我国煤炭资源开采主要在地下进行作业,不安全因素较多,人员和财产安全得不到有效的保障。
随着国家对煤炭安全的重视,煤矿广播系统等煤矿通信系统在煤矿安全生产中的作用越来越突出,是井上井下间相互交流的重要保障,有助于调度中心在危机情况下进行人员调度,进而保障人员安全[1~3]。
随着科学技术的不断发展,煤矿各个领域与现代化信息技术的结合越来越密切,煤矿广播系统已经朝着网络集成、智能化等方向发展,为及时防止煤矿危险事故的发生、安全事故中有效指挥人员撤离提供了保障。
传统语音广播已经退出历史舞台,以太网和CAN总线相结合的网络数字语音传播系统在煤矿广播中的作用不断凸显[1~3]。
文章以以太网和CAN总线等技术为支撑,从系统总体架构、硬件、软件等方面进行煤矿广播系统设计,为煤矿安全生产提供了保障。
1 关键技术煤矿广播系统在井上井下的交流中起着重要作用,是调度中心进行井下指挥的重要方式。
IP网络广播等广播技术具有资源占用大、布线存在盲区等缺点,使得这部分广播技术在实际中逐渐被CAN总线等通讯方式取代。
以太网和CAN总线等关键技术是煤矿广播系统设计的关键[1,3]。
1.1 工业以太网以太网作为一种分组交换局域网技术在20世纪70年代后迅速发展,以太网与光线技术的结合使“光以太网”出现在人们的眼前,提升了数据传输技术。
工业以太网是以太网在管理领域和工业控制领域的应用,是通信中的重要方式。
基于CAN通信的卡车语音报警器的设计

基于CAN通信的卡车语音报警器的设计汽车诊断技术是汽车安全技术中不可缺少的一部分,它能在汽车发生故障时及时地进行语音报警,避免事故的发生。
CAN即控制器局域网,是国际上应用最广泛的现场总线之一。
由于CAN总线技术的优良特性,在汽车电气系统以及其他一些实时控制单元中得到广泛应用。
一种基于CAN总线的通信网络具有速度高、抗噪性强及通用性好等优点。
我们设计的基于CAN总线技术的卡车语音报警系统能给汽车乘员提供一个安全的驾乘环境。
该语音报警系统采用了摩托罗拉公司的M68HC908GZ16微控制器,该微控制器尺寸小,资源齐全,具有很高的性价比。
CAN总线位定时CAN总线采用同步串行通信方式,数据流中的字符与字符之间、字符内部的位与位之间都同步,这就要求收/发双方必须以同步时钟来控制数据的发送和接收。
要在相当长的数据流中保持位同步,接收端必须能识别每个二进制位是从什么时刻开始的,这就是位定时。
通常为保证接收器时钟和发送器时钟严格一致,采用接收器通过解调器从数据流中提取同步信号,或者接收器和发送器使用统一的时钟的方法。
但是即便这样,仍然很难解决总线传输延时问题。
针对以上问题,CAN 总线的位定时改进了位编码/解码。
CAN总线位定时由4部分组成:同步段(SYNC_SEG)、传播段(PROP_SEG)、相位段1(PHASE_SEG1)和相位段2(PHASE_SEG2)。
同步段用于同步总线上的各节点,在此段等待一个跳边沿;传播段用于补偿网络内的物理延迟时间;相位段1及相位段2用做补偿相位误差。
在采样点读总线电平。
M68HC908GZ16微控制器中内置CAN控制器,提供了波特率控制寄存器;SJW (重同步跳转宽度)决定了一次重同步期间一个位时间被延长或缩短的时间量子;BRP为波特率预分频系数;Spl(采样模式位)决定对有效位采样的次数。
位定时主要用于定义CAN总线通信的速率,对同一总线上的各个节点应定义同一种通信速率,否则无法进行通信联系。
CAN总线系统介绍

CAN总线系统介绍CAN总线系统的设计目标是减少电缆数量,简化系统连接,并且能够处理实时应用的高要求。
它使用了一种基于广播的多主机通信方式,可以同时传输多个消息,并且能够实现高速的数据传输。
CAN总线系统包括了CAN协议、物理层、硬件和软件等多个组成部分。
首先,CAN协议定义了消息传输的格式和规范。
它规定了CAN帧的结构,包括报文的ID、数据和错误检测等。
CAN协议具有优先级机制,能够处理多个消息的冲突,并能够实现实时性要求。
CAN协议还定义了错误检测和重试机制,可以确保消息传输的可靠性。
其次,CAN总线系统的物理层定义了电气特性和传输速率。
CAN总线采用双绞线作为传输介质,可以实现长距离的数据传输。
物理层的标准规定了不同传输速率下的电压和波特率等。
CAN总线系统支持多种传输速率,常见的有500kbps和1Mbps等。
CAN总线系统的硬件主要包括控制器和节点设备。
控制器是CAN总线系统的核心,负责实现CAN协议、处理消息传输和管理总线。
节点设备连接在总线上,通过控制器进行数据传输和通信。
节点设备可以是传感器、执行器或其他嵌入式设备。
最后,CAN总线系统还涉及到软件开发和应用。
开发者可以使用各种编程语言和开发工具进行CAN总线系统的软件设计和开发。
常见的软件开发任务包括消息的发送和接收、错误处理和数据解析等。
应用方面,CAN总线系统广泛应用于汽车领域,包括发动机控制、车载网络和车身电子等。
此外,它还可以应用于工业自动化、航空航天和医疗设备等领域。
总之,CAN总线系统是一种用于实时应用的通信协议和硬件总线。
它通过CAN协议定义了消息传输的格式和规范,通过物理层定义了电气特性和传输速率,通过硬件实现了设备之间的数据传输。
CAN总线系统广泛应用于车辆电子系统、工业自动化和其他嵌入式系统,为多个设备提供可靠的通信和数据传输。
基于TMS320F2812 DSP的CAN总线矿用语音通信系统设计
2 0 1 3年 1 2月
De C .2 01 3
文 章编 号 : 1 6 7 2 - 0 5 8 X( 2 0 1 3 ) 1 2 - 0 0 3 7 - 0 6
基于 T MS 3 2 0 F 2 8 1 2 D S P的 C A N
总线 矿 用 语 音通 信 系统 设 计 木
梅 申合 , 廖 晓纬 , 沈晓波
( 1 . 安徽 大学 电子信息工程学院 , 合肥 2 3 0 6 0 1 ; 2 . 淮 南师范学院 电气信息工程学院 , 安徽 淮南 2 3 2 0 3 8 )
摘
要: 分析 了 当前 煤矿 井 下广播 系统 的弊 端 , 提 出 了一种 基 于 D S P的 C A N总 线矿 用语 音 通信 系统 的
或所有广播分站进行广播 。广播 主站和分站都采用 T I 的D S P芯片 T M S 3 2 0 F 2 8 1 2 作为信号采集和控制单
元 ] , 输入 的模 拟声 音信 号 经过模 拟 放大 电路 , 送人 T MS 3 2 0 F 2 8 1 2的 A / D采集 口, 转换 完 成后 , 把 数 据暂 时
关键 词 : 语 音通信 ; D S P; C A N 总线 ; D A C 7 7 2 4
中图分 类号 : T N 9 1
文献标 志码 : A
煤炭产业是我国的基础产业 , 煤矿安全是煤炭企业健康稳定发展的重要保 障。如何保持调度室与井下 通信实时是保证煤矿安全生产的关键环节。现在许多煤矿的井下广播仍使用着传统的调度通信系统 , 调度
第3 0卷 第 1 2期
Vo 1 . 3 0 NO. 1 2
重 庆工 商 大学 学报 ( 自然科 学版 )
J C h o n g q i n g T e c h n o l B u s i n e s s U n i v . ( N a t S c i E d )
基于CAN总线的多节点语音通信系统设计

基于CAN总线的多节点语音通信系统设计随着科技的发展,语音通信在我们的日常生活中起着越来越重要的作用。
为了满足多节点之间的语音通信需求,本文设计了一种基于CAN总线的多节点语音通信系统。
首先,我们需要了解CAN总线的特点。
CAN(Controller Area Network)总线是一种高度可靠的实时通信协议,广泛应用于汽车、工业控制等领域。
它具有高带宽、低延迟和可靠性强的特点,非常适合用于多节点语音通信系统。
在设计多节点语音通信系统时,我们需要考虑以下几个方面。
首先是节点之间的通信方式。
基于CAN总线的多节点语音通信系统可以采用点对点通信方式,即每个节点都可以直接与其他节点进行通信。
这样一来,每个节点都能够实时地接收和发送语音数据,实现实时的语音通信。
其次是语音数据传输的方式。
在多节点语音通信系统中,语音数据需要通过CAN总线进行传输。
为了确保数据的实时性和可靠性,我们可以采用分时复用的方式,即将语音数据分为多个小包进行传输,每个节点按照预定的时间片轮流发送和接收数据。
这样一来,即使在多节点同时发送数据的情况下,也能够保证数据的传输效率和可靠性。
最后是节点之间的数据处理和控制。
在多节点语音通信系统中,每个节点都需要对接收到的语音数据进行处理和控制。
可以使用数字信号处理技术对语音数据进行降噪、增益等处理,以提高语音通信的质量。
同时,每个节点还需要实现相应的控制逻辑,以实现语音通信的功能,例如呼叫、接听等。
综上所述,基于CAN总线的多节点语音通信系统设计具有高带宽、低延迟和可靠性强的特点,非常适合应用于实时语音通信场景。
通过合理的节点通信方式、语音数据传输方式以及节点数据处理和控制,可以实现实时的多节点语音通信。
这种系统设计在汽车、工业控制等领域具有广阔的应用前景,将为我们的生活带来更加便利和高效的语音通信体验。
基于CANopen协议的矿用语音通信系统研究.doc

基于CANopen协议的矿用语音通信系统研究1 引言现场总线的研究与应用早已成为工业数据总线领域的热点,CAN 总线作为一种技术先进、可靠性高、功能完善、本钱合理的远程网络通讯控制方式,已被广泛应用到自动化控制系统中。
由于CAN 本身并非一个完整的协议,因而进行高效率的通讯还需要进一步开发高层协议,而CANopen 协议就是建立在CAN 协议物理层和数据链路层基础上的标准化应用层协议,其采用面向对象的思想设计,具有很好的模块特性和很高的适应性,且精练透明、易于开发。
本文围绕由微控制器PIC18F458和语音处理芯片AMBE-1000 构成的语音通信系统研究了CANopen 协议在基于CAN 总线的语音通信系统中的应用情况。
2 语音通信系统的硬件设计2.1 系统原理系统由上位机,网关,节点,中继等组成,利用已有的CAN 总线实现实时语音和监控数据的传输。
通信过程为:语音数据通过麦克采集输入后经A /D 转换变成数字信号,而语音处理模块AMBE-1000 对数字信号压缩编码后传送给本地微处理器PIC18F458,然后微处理器通过CAN 收发器将收到的数据经CAN 总线送给远方微处理器。
相应的,远方微处理器对收到的数据经过上述步骤的反向处理最终还原为语音信号并由喇叭播放。
当没有语音信号需要处理传输时,系统自动开启MP3 功能播放背景音乐。
2.2 信道接口设计微控制器采用Microchip 公司的PIC18Fxxx 系列芯片,其内含有A/D、内部EEPROM 存储器、CAN 控制器、SPI 接口、FLASH 程序存储器读/写等强大功能。
语音处理模块采用Digital Voice Systems 公司推出的语音压缩/ 解压芯片AMBE-1000,其压缩率可在2.4kbps-9.6kbps 范围内由软件调节,且具有FEC(前向纠错)、VAD(语音激活检测)功能和DTMF 信号检测功能。
AMBE-1000 与微控制器PIC18F458 进行通信的信道接口为串行SPI 接口,有两种工作模式:主动模式和被动模式。
基于冗余CAN总线的实时通信系统设计

Re a l - t i me Co mmu n i c a t i o n S y s t e m Ba s e d o n Re d u n d a n c y CAN- Bu s
S U Hu — pi ng, S HEN S a n — mi n, LI U W e n - y i , YE Yo n g
Ab s t r a c t : Ac c o r d i n g t o t h e h i g h e r r e q u e s t a b o u t he t r e l i a b i l i t y f o he t c o mmu n i c a t i o n s y s t e m f o r i n d u s t r i a l e n v i r o n me n t
t i me C AN- n o d e i n t h e n e t w o r k, w h i c h t h i s me t h o d e f e c t i v e l y e n h a n c e t h e s y s t e m r e l i bi a l i t y o f t h e d a t a t r a n s mi s s i o n .
b u s — r e d u n d a n c y d e s i g n or f e a c h n o d e i n t he C AN— n e t w o r k a t t h e S a B l e t i me . Wh e n t h e ma i n - n o d e w a s f a i l e d, t h e s y s t e m s w i t c h e s t o t h e b a c k u p — n o d e, a n d w h e n t h e C AN— b u s w a s f a i l e d, t h e s y s t e m s wi t c h e s t o t h e b a c k u p — b u s .T h e ma i n c o n t r o l mo d u l e - F P GA o f t h e s y s t e m t h a t h a v e d e v e l o p e d a u n i f i e d c o mmu n i c a t i o n- p r o t o c o l mo n i t o r s a l l r e l- a
基于CAN总线的语音通信系统

基于CAN总线的语音通信系统
随着现场总线技术的发展,CAN总线作为比较有前途的现场总线之一,越来越受到科技工作者的关注。
在工业现场、交通、电力系统等调度环境中,常常需要语音通信监控系统,而大多数语音通信系统由传统的电路交换技术及公众交换电话网(PSTN)实现。
随着现场总线的发展与技术的成熟,CAN总线在工业生产的应用越来越广泛,CAN总线也显现出强大的优势。
本文介绍的是一个基于CAN总线的语音通信系统的硬件电路设计,探索CAN总线在实时语音数据传输领域的应用。
文章主要论述了一个基于CAN总线的语音通信系统的软硬件设计。
该系统使用摩托罗拉公司的MC14LC5480作为语音采集编解码器,AT89C55为处理器,通
过CAN总线的PELICAN模式实现通信功能。
系统主要目的是能够实现CAN总线上的语音信号的传输,最终能够实现多节点间的语音通信功能。
本文的前半部分介绍了语音编码技术和CAN总线的通信网络。
评价语音信号用于CAN总线传输的优点,分析摩托罗拉公司生产的一款通用单信道PCM编码解码器滤波器MC14LC5480的性能,用于该系统的语音采样率等问题。
文章后半部分详细分析了基于CAN总线的语音通信系统的软硬件技术,通过分析系统所涉及的芯片对该方案分功能模块做了详细的说明,包括语音编解码电路,数字信号处理电路,CAN总线传输电路等。
基于ARM技术的CAN总线监控及语音通讯系统研究与设计
基于ARM技术的CAN总线监控及语音通讯系统研究与设计摘要系统是基于PLC控制技术、ARM芯片技术和工业CAN总线技术与一体的数字语音传输信息检测系统。
该系统使用了精简可靠的S7-200 PLC做核心处理单元;以功能强大的ARM芯片做沿线信息采集与控制单元;以CAN总线通讯协议做核心通信单元;以三菱FX2N系列PLC做语音仲裁单元;以PIC18F4520单片机芯片做PLC的地址映射单元等。
通过以上各个技术单元的合理搭配,实现了整个系统的数据检测、语音播报、语音呼叫、综合保护等功能为一体的综合系统。
关键词ARM;STM32;CAN;数字语音;数据监控0引言在当今现场总线中,工业监控系统中普遍采用的是基于RS485总线的半双工通讯方式,只能构成主从式结构系统,通信方式也只能以主站轮询的方式进行,系统的实时性、可靠性较差。
这种通讯方式信息传输速度慢,很难满足大规模工业自动化安全监控系统对实时性的要求。
针对普通通信协议的不足,本文提出了采用CAN总线实现的无主式通讯方式。
1系统总体设计系统从功能上分类,可分为:核心PLC子系统、CAN总线监控子系统、语音仲裁等。
PLC子系统是CAN总线监控系统的上一级控制单位,也是系统的核心控制;语音仲裁是协助CAN总线监控系统实现数字语音功能的部件。
由此可见,CAN总线监控系统是整个系统的核心,也是联络其他各子系统的桥梁。
1.1 CAN总线系统设计CAN总线系统包括ARM系统主控制板、ARM系统电话板、ARM系统闭锁板、ARM系统尾端板。
系统的网络结构图如图1所示。
图1 CAN总线系统的网络连接示意图CAN总线监控系统的所有电路板核心MCU处理器是STM32F107VCT6,该处理器基于ARM V7架构的Cortex-M3内核,主频72Mhz,内部含有256K字节的FLASH和64K字节的SRAM。
链接与CAN总线上的各种功能的电路板,通过STM32F107VCT6自带的CAN接口芯片,在电路板上设计以CAN信号隔离器,就能挂接到CAN总线上。
基于SJA1000的CAN总线通信系统的设计

Absr c : Th satce i to uc d te man tc n c lc a a trsiso ta t i ril n rd e h i e h ia h r ce itc fCAN u ,a e c i e h a d b s nd d s rb d t e h r —
邵 玉 华
摘 要 :介 绍 C N总线主要技 术特性 ,简述 基 于 SA 0 0的 C N 总线接 口电路 的软 、硬件 设 计 A J 10 A
方 法 ,给 出 C N总线接 口电路 、SA 0 0初 始 化程 序 、接 收及 发送 数 据 的程 序框 图 ,满足 C N A J 10 A
C N ( 制 器 局 部 网 ) 总 线 是 一种 支 持 分 布 A 控 式控 制或实 时控 制 的 串行 通 信 网络 ,以其 实 时 性 、
1 A .C N总线是 一种 多 主 总线 ,节 点机 之 间也
可进 行通 信 ,且 每个节点 机均 可成为 主机 。 2 .通信 接 口集 成 了 C N协 议 的物 理层 和数 据 A 链路层 功能 ,可完 成对通 信数据 的成 帧处理 ,包 括
重要方 面 Байду номын сангаас选 择 网管产 品不仅要 满足 自身 网络 的需 求 ,还 要结合 网络 的未来 发展趋 势 ,例 如 ,铁路 计 算机通 信 网络 的今 后发 展 规模 大 小 、关 键新 业 务 、
设 备更 新及频度 、管 理成效 性要求 ,以及 运输生 产 的潜在需 求 ;又 如 ,D L工作 组 于 2 0 S 0 6年 定 义 了 大容量 宽 带设 备 I 话 鉴 权 和 管 理 机 制 等 规 定 , P会
基于CAN总线和语音识别的智能家居控制系统的设计
第28卷 第2期2010年2月 嘉应学院学报(自然科学)JOURNAL OF J I A YI N G UN I V ERSI TY (Natural Science ) Vol .28No .2Feb .2010基于CAN 总线和语音识别的智能家居控制系统的设计杨永华(嘉应学院电子信息工程学院,广东梅州514015)收稿日期:2010-01-05作者简介:杨永华(1977-),男,广东梅州人,实验师,硕士,主要研究方向:检测技术与自动化装置。
摘 要:设计了一种基于C AN 总线和语音识别的智能家居控制系统。
主要介绍了系统硬件设计,包括语音识别系统、CAN 接口设计和基于公共电话网的远程控制接口设计等,并简述了系统的软件设计。
该系统实现了家居进行特定人语音识别控制不受空间限制,达到任意点集中家电管理的目的,具有很好的应用前景。
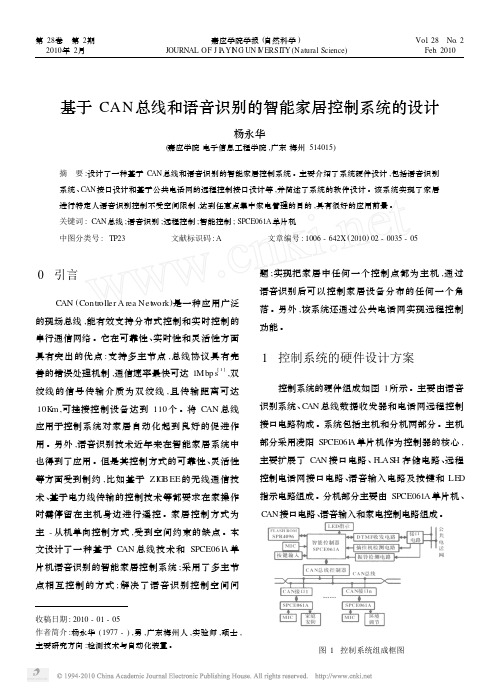
关键词:C AN 总线;语音识别;远程控制;智能控制;SPCE061A 单片机中图分类号:TP23文献标识码:A文章编号:1006-642X (2010)02-0035-050 引言CAN (Contr oller A rea Net w ork )是一种应用广泛的现场总线,能有效支持分布式控制和实时控制的串行通信网络。
它在可靠性、实时性和灵活性方面具有突出的优点:支持多主节点,总线协议具有完善的错误处理机制,通信速率最快可达1Mbp s[1],双绞线的信号传输介质为双绞线,且传输距离可达10K m ,可挂接控制设备达到110个。
将CAN 总线应用于控制系统对家居自动化起到良好的促进作用。
另外,语音识别技术近年来在智能家居系统中也得到了应用。
但是其控制方式的可靠性、灵活性等方面受到制约,比如基于ZI G BEE 的无线通信技术、基于电力线传输的控制技术等都要求在家操作时需停留在主机身边进行遥控。
家居控制方式为主-从机单向控制方式,受到空间约束的缺点。
本文设计了一种基于CAN 总线技术和SPCE06l A 单片机语音识别的智能家居控制系统;采用了多主节点相互控制的方式;解决了语音识别控制空间问题;实现把家居中任何一个控制点都为主机,通过语音识别后可以控制家居设备分布的任何一个角落。
基于现场总线的语音通信方法的研究

C N A 的信 息 以报文 方 式传递 , 化 了节 点地址 的 淡
作者简介 : 乔有 田(9 3 , 扬州职业大学电子工程 系助教。 1 7 一) 男, 硕士。
维普资讯
第 2期
乔有 田: 基于现场总线的语音通信方法 的研究
QIO Y ut n A o—a i
(Y nzo oyeh i C lg ,Y nzo 2 0 9 C i agh uP lt n l e aghu2 50 , hn c co e a)
Ab t a t n t i a e ,t e me h d o r n mit g v ie s n l i h o l n i h il b st c n l s r c :I h sp p r h t o fta s ti o c i as n t e c a mi ew t t e f d u e h o — n g h e o y i s u id.Th n,t e c m p e so lo ih wi u t a d e ct t n v ie a d t e a v n a e o g t de s e h o r s i n ag rt m t m l b n x i i o c n h d a t g f h i a o t a s i i n wih C r n m s o t AN r l x li e e e I h n ,a v ie c mm u i t n s s e i e i n d b a e a s e pan d h r . n t e e d o c o o n c i y t m s d s e y a o g u i g t e AM BE一 0 0 v ie c mp es d c i n A o to lr sn h 2 0 oc o rse hp a d aC N cnrl . e
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文)题目基于CAN总线的语音通信院(系部)电气学院专业名称自动化年级班级10-02学生姓名王俊耀指导教师张宏伟2014 年5 月28日毕业设计(论文)任务书专业班级自动化10-02班学生姓名王俊耀一、题目基于CAN总线的语音通信系统二、起止日期2014 年03 月20 日至2014 年06 月05 日三、主要任务与要求设计一个基于CAN总线的语音广播系统,所有语音节点挂到同一根CAN总线上,节点不分主从,工作人员在任何一个节点都可以与CAN总线上的其他任何节点上的工作人员进行广播对话。
节点可以灵活接入。
中继器用来延长通信距离,无中继通讯距离至少两公里。
指导教师职称学院领导签字(盖章)年月日毕业设计(论文)评阅人评语题目评阅人职称工作单位年月日河南理工大学毕业设计(论文)评定书题目指导教师职称年月日毕业设计(论文)答辩许可证答辩前向毕业设计答辩委员会(小组)提交了如下资料:1、设计(论文)说明共页2、图纸共张3、指导教师意见共页4、评阅人意见共页经审查,专业班同学所提交的毕业设计(论文),符合学校本科生毕业设计(论文)的相关规定,达到毕业设计(论文)任务书的要求,根据学校教学管理的有关规定,同意参加毕业设计(论文)答辩。
指导教师签字(盖章)年月日根据审查,准予参加答辩。
答辩委员会主席(组长)签字(盖章)年月日毕业设计(论文)答辩委员会(小组)决议学院专业班同学的毕业设计(论文)于年月日进行了答辩。
根据学生所提供的毕业设计(论文)材料、指导教师和评阅人意见以及在答辩过程中学生回答问题的情况,毕业设计(论文)答辩委员会(小组)做出如下决议。
一、毕业设计(论文)的总评语二、毕业设计(论文)的总评成绩:三、答辩组组长签名:答辩组成员签名:答辩委员会主席:签字(盖章)年月日摘要近年来,煤炭安全事故频发,煤炭安全一直是煤炭生产的重中之重。
传统采用电话和局部广播均不能实现井上井下自由通信,为了实现这一功能,设计了基于CAN 总线的数字语音广播通信系统。
该系统利用CAN 总线的特点而设计的。
利用该系统调度室可以在同一时间内通知矿井中的所有工作人员安全撤离,并按照矿井应急预案指挥抢险救灾;井下人员也可以及时与调度室联系,及时通报情况;井下也具有局部通信功能,方便井下人员直接的联系和通报事情。
该系统核心部分采用内置CAN 控制器ARM coterx-M3内核的STM32单片机作为控制器,与独立的CAN 收发器CTM8251 构成CAN 收发模块;采用低传输速率和高通话质量的AMBE-1000 芯片作为语音编码器。
用CSP1027对语音进行AD采样和AD转换。
通过同轴电缆或者双绞线进行信号传输,通信线路简单。
各节点之间可以灵活接入,通信距离远,在不加中继器的情况下可以传输10公里。
经测试表明,各节点间可以实现可靠,语音质量高的实时性通信。
关键词:煤矿 CAN总线广播AbstractI n recent years, the coal safety accidents happen frequently , so the coal production safety has been a top priority . Traditional use of the telephone and the local radio can not achieve freedom ommunications inoue underground . In order to achieve this functionality, the design of digital audio broadcasting communication system based on CAN bus is made. And the system is designed using the characteristics of the CAN bus. You can use the system to notify the control room at the same time for all staff to evacuate the mine safely and in accordance with the mine contingency plans command rescue and relief ; mine personnel can contact the control room and promptly inform thing; mine also has a local communication function to facilitate underground staff direct contact and communication .Using the CAN controller with built- core ARM cortex-M3 STM32 MCU as a controller is the core of the system, which and a separate CAN transceivers CTM8251 constitute CAN transceiver module .We use low transmission rates and high call quality AMBE-1000 chip as a speech coder .We use CSP1027 to AD sample and AD convert for voice . Signal transmitted through a coaxial cable or twisted pair . Communication line is simple . The inter nodes can be flexible access.Though communication distance, without repeaters it can transmit 10 km .Tests showed that the inter nodes can achieve reliable , high- quality voice and real-time communications .Key words:Coal CAN bus broadcasts目录引言 (1)1 整体设计 (2)2 结点设计 (3)2.1 单片机的选型和最小系统的设计 (3)2.1.1 单片机的选择 (3)2.1.2单片机最小系统的设计 (5)2.2 CAN总线接口的 (5)2.3 语音模块 (6)2.3.1 语音AD采样和DA转换模块 (6)2.3.2 语音压缩和解压缩模块 (7)2.4 运放模块 (8)2.5 节点状态转换 (9)3 通讯网络的设计 (10)3.1 中继器的设计 (10)3.2 通信电路的比较和选择 (10)4 软件算法设计 (12)4.1 软件设计的整体思想 (12)4.2 主函数程序流程图设计 (13)4.3.1 RTC定时器中断 (13)4.3.2 CAN接收中断 (14)4.4 语音采集和语音还原的程序设计 (15)4.4.1 语音芯片的复位 (15)4.4.2 语音帧的读写 (15)4.5 数据帧格式的转换 (17)5 调试 (18)5.1 语音模块的调试 (18)5.2 通信电路的调试 (18)5.3 整体调试 (18)6 结论 (19)致谢 (20)参考文献 (21)附录一:语音模块电路图 (22)附录二:单片机最小系统电路图 (23)附录三:主控板的电路图 (24)附录四:部分程序 (25)引言中国作为产煤大国,煤矿安全一直是煤炭生产中的重中之重。
如何保持调度室与井下通信实时和畅通是保障煤矿安全生产的重要环节。
现在国内通信系统只要分为两种:一种是调度电话,包括有线和无线两种;另一种是井下局部扩音电话系统。
调度电话和家庭用的电话机一样,必须响铃,等待接通,实现通话。
然后有接话人告诉周围的人员,存在着声音过小,难以挺清楚的问题。
局部扩音电话只剩实现矿下局部通信,不能实现和地面的联系。
针对现有通讯系统的弊端,建立一套实时的煤矿语音通信系统来保障煤矿人员在紧急情况下的安全撤离是当务之急。
CAN总线采用了许多新技术及独特的设计,与一般的通讯总线相比,它的数据通讯具有突出的可靠性、实时性和灵活性等特点。
CAN总线各节点之间不分主次,可以根据需要设计不同的优先级,可以实现点对群体的通信。
在通信距离不超过10千米的情况下,通信速度可以达到1M/s。
采用非破坏性仲裁,节点数量目前可达到110个,通信线路可采用双绞线,同轴电缆和光纤。
CAN总线具有节点容易扩展的特点。
AMBE编码采用了低速高效的编码方式,可以在2.4Kb/s的情况下达到接近GSM语音质量的通话效果,而且具有较好的自然度和容忍环境噪声的能力,是目前这一速率范围内较理想的编码方案,非常适合应用在远距离传输的语音系统中。
本设计针对煤矿环境的特点,以CAN总线和AMBE编码技术为基础,采用STM32芯片和AMBE1000为核心设计的一套基于CAN总线的煤矿语音通信系统。
1 整体设计煤矿语音系统是一种应用于煤矿的语音通信系统,可是实现调度室向井下喊话、通知事情、紧急情况通报等,也可以用于井下向井上通知事情和井下通信。
通信系统有井上部分和井下部分组成。
井上部分位于调度室。
井下部分有语音节点和中继器组成。
语音节点以分组的形式布置在井下的工作面、掘进面、皮带巷、运输巷等。
节点的数目根据井下规模的大小而动态布置。
在整个系统中,CAN主站和语音分站在原理上一致,在设计均称为语音节点。
语音分站则只负责接收属于自己的 CAN 帧,并从 CAN 数据帧中取出有效的语音负载进行音频解码还原工作,语音分站除了接收语音外还可以实现井下组内通话和上行调度通话功能。
分组中继器主要为了从 CAN 主网络上创建一个 CAN 子网络,并对 CAN 主网络上的报文进行过滤,以实现不同子网间多路组内通话的并行进行,而无须增加额外的冗余 CAN 总线。
整体图如图1-1所示。
图1-1 煤矿语音系统整体设计2 结点设计系统主要由三个部分组成,但由于广播主站和语音分站区别甚少,因此仅以框图的形式将两者合并介绍,并称之为语音节点。
语音节点主要由控制器、语音压缩编码解码模块、语音AD采样DA输出模块、CAN 通信接口模块组成,如图 2 -1所示。
其中箭头描绘的是语音节点中信号的流向。
CAN控制模块有CAN收发器和CAN控制器组成,若使用的MCU 仅内嵌了一个CAN 控制器,则需要使用一个独立的CAN 收发器。