简单的AVR程序
AVR_studio_4教程

第三节:面向新手的AVR开发工具,及基本知识互联网上下载AVR STUDIO 4首先,请放松,我们首先要做的只是下载AVR开发软件和相关的资料。
下载前确保这些软件有效,下载的时间取决于你连接互联网的速度。
下载以下文件到你的计算机中(如C:\Temp)AVR STUDIO 4(~15MB) This file contains the AVR Studio 4 Program. This program is a complete development suite, and containsan editor and a simulator that we will use to write ourcode, and then see how it will run on an AVR device.Assembly Sample Code(~1kB) This file contains the Assembly Sample code you will need to complete this guide.AT90S8515 Datasheet(~4MB)This is the Datasheet for the AT90S8515 AVR Microcontroller. This is a convenient "Getting Started"device. For now you don't have to worry about thedifferent types of AVR micros. You'll see that they arevery much alike, and if you learn how to use one (eg.8515), you will be able to use any other AVR withoutany problems.Instruction SetManual(~2MB)This is the Instruction Set Manual. This document is very useful if you want detailed information about a specific instruction.AVR STUDIO4:这个文件是一个完整的开发工具,包括编辑、仿真功能,利用这个工具,我们可以编辑源代码,并在AVR器件上运行。
avr单片机gcc程序设计

AVR单片机GCC程序设计1. 介绍AVR单片机是一种基于哈佛架构的8位微控制器,具有高性能、低功耗和广泛的应用领域。
GCC是一种开源的编译器套装,可用于编译C、C++和其他编程语言。
本文将介绍AVR单片机的GCC程序设计,包括开发环境的搭建、程序的编写和调试等内容。
2. 开发环境搭建为了进行AVR单片机的GCC程序设计,我们需要搭建相应的开发环境。
以下是搭建开发环境的步骤:2.1 安装AVR工具链AVR工具链是AVR单片机编程的基础,它包含了编译器、汇编器、链接器等工具。
可以从AVR官方网站上下载并安装AVR工具链。
2.2 安装开发环境在进行AVR单片机GCC程序设计之前,需要安装一个适合的开发环境。
常用的开发环境有AVR Studio和Atmel Studio等。
可以根据个人需求选择一个适合的开发环境进行安装。
2.3 配置编译器在开发环境中配置编译器是非常重要的步骤。
需要将AVR工具链的路径添加到系统环境变量中,以便编译器能够找到相应的工具。
3. GCC程序编写在搭建好开发环境后,就可以开始编写GCC程序了。
以下是GCC程序编写的基本步骤:3.1 编写主函数GCC程序的入口是一个名为”main”的函数。
可以在这个函数中进行初始化操作和主程序的编写。
#include <avr/io.h>int main() {// 初始化代码while (1) {// 主程序代码}}3.2 配置引脚AVR单片机的GPIO引脚可以作为输入或输出使用。
可以使用AVR提供的头文件来配置引脚。
#include <avr/io.h>int main() {DDRB = 0xFF; // 将PB引脚配置为输出while (1) {// 主程序代码}}3.3 读写引脚可以使用AVR提供的函数来读写引脚的电平。
#include <avr/io.h>int main() {DDRB = 0xFF; // 将PB引脚配置为输出while (1) {PORTB = 0xFF; // 将PB引脚输出高电平// 延时PORTB = 0x00; // 将PB引脚输出低电平// 延时}}3.4 中断处理AVR单片机支持外部中断,可以在需要的时候触发中断处理函数。
AVR单片机程序
A VR单片机程序* 文件名:闪烁灯.c* 杜邦线接法:用单条杜邦线把PD.0与J38的1端相连接。
***********************************************************************/ #include <avr/io.h>#define F_CPU 8000000 //这里的值是单片机工作的有关晶振频率#include <util/delay.h>#define LED1 PORTD|=~0XFE //LED=1 LED不亮#define LED0 PORTD&=0XFE //LED=0 LED发光int main(void){DDRD = 0x01; //PD0定义为输出,PD的其他端口为输入。
while(1){LED1;_delay_ms(500);LED0;_delay_ms(500);}}/********************************************************************* 文件名:闪烁灯2.c* 创建人:东流,2012年2月10日* 版本号:1.0* 杜邦线接法:用8针杜邦线把PD与J38的1--8连接(PD0对应J38的1端)。
用杜邦线把PB0对应J38的9端。
用杜邦线把PB1对应J38的10端。
用杜邦线把PB2对应J38的11端。
用杜邦线把PB3对应J38的12端。
***********************************************************************/ #include <avr/io.h>#define F_CPU 8000000 //这里的值是单片机工作的有关晶振频率#include <util/delay.h>int main(void){DDRD = 0xff;DDRB = 0x0f;while(1){/*北面的三个LED亮*/PORTD = 0xf8;PORTB = 0xff;_delay_ms(300);/*东面的三个LED亮*/PORTD = 0xc7;PORTB = 0xff;_delay_ms(300);/*南面的三个LED亮*/PORTD = 0x3f;PORTB = 0xfe;_delay_ms(300);/*西面的三个LED亮*/PORTD = 0xff;PORTB = 0xf1;_delay_ms(300);/*北面的两个LED亮,中间一个不亮*/ PORTD = 0xfa;PORTB = 0xff;_delay_ms(300);/*东面的两个LED亮,中间一个不亮*/ PORTD = 0xd7;PORTB = 0xff;_delay_ms(300);/*南面的两个LED亮,中间一个不亮*/ PORTD = 0xbf;PORTB = 0xfe;_delay_ms(300);/*西面的两个LED亮,中间一个不亮*/ PORTD = 0xff;PORTB = 0xf5;_delay_ms(300);/*12个LED全亮*/PORTD = 0x00;PORTB = 0xf0;_delay_ms(200);/*12个LED全灭*/PORTD = 0xff;PORTB = 0xff;_delay_ms(200);/*12个LED全亮*/PORTD = 0x00;PORTB = 0xf0;_delay_ms(200);/*12个LED全灭*/PORTD = 0xff;PORTB = 0xff;_delay_ms(200);_delay_ms(500); //延时0.5秒}}/********************************************************************* 文件名:闪烁灯2.c* 描述: 在LED上根据要求,进行不一致的显示。
avr单片机看门狗程序

单片机看门狗程序/*此程序实现单片机"看门狗"WDT的功能*/#include "p18f458.h"unsigned long i;/*系统初始化子程序*/void initial(){TRISD = 0X00; /*D口设为输出*/}/*延时子程序*/void DELAY(){for (i=19999;--i;)continue;}/*主程序*/main (){initial(); /*初始化,设定看门狗的相关寄存器*/PORTD = 0X00; /*D口送00H,发光二极管亮*/DELAY(); /*给予一定时间的延时*/PORTD = 0XFF; /*D口送FFH,发光二极管灭*/while(1){;} /*死循环,等待看门狗溢出复位*/}-------------------汇编语言版本的单片机看门狗程序---------------- ;此程序实现"看门狗"WDT的功能;此单片机看门狗由独家提供LIST P=18F458INCLUDE "P18F458.INC"DEYH EQU 0X20DEYL EQU DEYH+1ORG 0X00GOTO MAINORG 0X30;*************初始化子程序*****************INITIALCLRF TRISD ;D口设为输出RETURN;**************延时子程序**************************DELAYMOVLW 0XFFMOVWF DEYHAGAIN1MOVLW 0XFFMOVWF DEYLAGAIN2DECFSZ DEYLGOTO AGAIN2DECFSZ DEYHGOTO AGAIN1NOPRETURN;************单片机看门狗主程序**************************** MAIN NOPCALL INITIAL ;系统初始化MOVLW 0X00MOVWF PORTD ;D口送00H,发光二极管亮CALL DELAYMOVLW 0XFFMOVWF PORTD ;D口送FFH,发光二极管灭LOOPGOTO LOOP ;死循环,等待看门狗复位ENDAVR看门狗程序范例A VR看门狗程序范例,程序演示了看门狗的复位过程,使用了本站新手入门的第一个范例,普通情况下,程序最后陷入死循环,但是这个程序里,看门狗让单片机复位,你会看见LED 一直闪动,效果和第一个范例程序相同。
avr单片机gcc程序设计
avr单片机gcc程序设计一、前言AVR单片机是一种常见的嵌入式系统处理器,广泛应用于各种电子设备中。
GCC是一款常用的C语言编译器,也可以用于AVR单片机程序设计。
本文将介绍如何使用GCC进行AVR单片机程序设计。
二、准备工作1. 安装GCC编译器GCC编译器可以在Linux、Windows和Mac OS X等操作系统上安装。
安装方法请参考相关文档。
2. 安装AVR-GCC工具链AVR-GCC工具链包括编译器和调试器等工具,可以在Linux、Windows和Mac OS X等操作系统上安装。
安装方法请参考相关文档。
3. 准备开发板选择一款支持AVR单片机的开发板,并连接到计算机上。
4. 编写代码使用C语言编写程序,并保存为.c文件。
三、编译过程1. 编译源代码打开命令行终端,进入.c文件所在目录,执行以下命令:avr-gcc -mmcu=atmega328p -Wall -Os -o main.o main.c其中,-mmcu选项指定了目标单片机型号;-Wall选项启用所有警告信息;-Os选项启用优化;-o选项指定输出文件名。
2. 生成可执行文件执行以下命令:avr-gcc -mmcu=atmega328p -o main.elf main.o其中,-mmcu选项指定了目标单片机型号;-o选项指定输出文件名。
3. 生成HEX文件执行以下命令:avr-objcopy -j .text -j .data -O ihex main.elf main.hex其中,-j选项指定要复制的段;-O选项指定输出格式。
四、烧录过程使用AVR ISP编程器将HEX文件烧录到目标单片机中。
五、调试过程可以使用AVR-GDB进行调试。
首先需要在编译源代码时添加-g选项,生成带有调试信息的可执行文件。
然后执行以下命令:avr-gdb main.elf进入GDB调试界面后,可以使用各种GDB命令进行调试。
六、结语本文介绍了AVR单片机GCC程序设计的基本过程,包括准备工作、编译过程、烧录过程和调试过程。
使用AVR Studio烧写程序
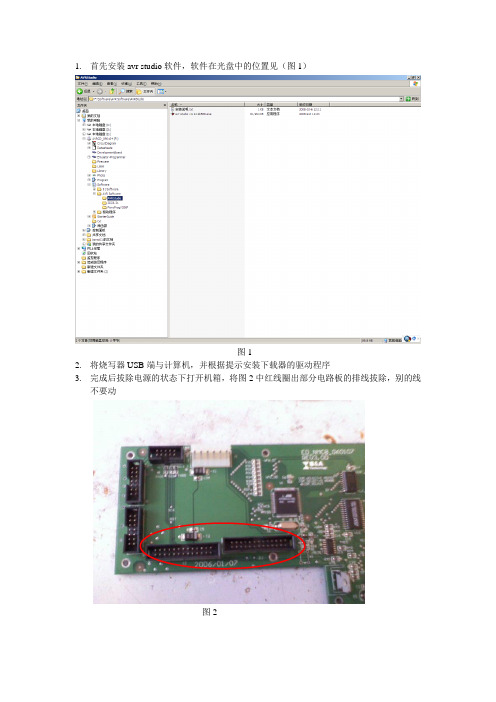
2.将烧写器USB端与计算机,并根据提示安装下载器的驱动程序
3.完成后拔除电源的状态下打开机箱,将图2中红线圈出部分电路板的排线拔除,别的线不要动
图2
4.将烧写器另一头插于电路板图3红线圈出位置
图3
5.以上步骤完成后打开设备电源,打开AVR Studio软件,出现图4所示,点击Cancel,
图4
图8-2(ATmega2561熔丝位,注意区分芯片型号并在“main”中选择型号)
5.根据图9所示正确设置并选择所要烧写的程序,最后点击Program
图9
6.点击图5中圈出位置,设置端口,端口具体设置见图6,端口号可以在设备管理器里查看,设置完后点击connect
图5
图6
5.点击connect,然后进入Program选项卡
图7
熔丝位,如图8所示进行勾选,并点击program
图8-1(ATmega128熔丝位)
点击connect后会跳出图所示对话框选择图中圈出位置不要点击旁边按键然后进入program选项卡熔丝位如图8所示进行勾选并点击program图81atmega128图82atmega2561熔丝位注意区分芯片型号并在main中选择型号根据图9所示正确设置并选择所要烧写的程序最后点击program
1.首先安装avr studio软件,软件在光盘中的位置见(图1)
avrdudess使用方法
avrdudess使用方法avrdudess是一个用于AVR微控制器的编程工具,它提供了一个简单易用的图形界面,使得程序烧录和调试变得更加方便。
本文将介绍如何使用avrdudess来进行AVR微控制器的编程。
我们需要安装avrdudess软件。
您可以在官方网站上下载该软件,并按照安装向导进行安装。
安装完成后,打开软件,您将看到一个主界面。
在avrdudess中,我们可以进行多种操作,包括读取和写入程序、擦除芯片、调试程序等。
接下来,我们将详细介绍每个操作的使用方法。
1. 读取程序:要读取芯片上的程序,我们首先需要连接目标AVR微控制器。
通过USB线将微控制器与计算机连接,并确保选择了正确的端口。
然后,在avrdudess的主界面上,选择“读取”选项。
接下来,选择合适的芯片型号和读取文件的路径,然后点击“开始读取”按钮。
avrdudess将自动读取芯片上的程序,并保存到指定的路径下。
2. 写入程序:要将程序烧录到AVR微控制器中,我们同样需要连接目标微控制器,并确保选择了正确的端口。
在avrdudess的主界面上,选择“烧录”选项。
然后,选择合适的芯片型号和要烧录的程序文件路径。
点击“开始烧录”按钮,avrdudess将自动将程序烧录到微控制器中。
3. 擦除芯片:如果您需要擦除芯片上的程序,可以选择“擦除”选项。
在avrdudess的主界面上,选择合适的芯片型号,并点击“擦除”按钮。
avrdudess将自动擦除芯片上的程序。
4. 调试程序:avrdudess还提供了调试程序的功能。
在avrdudess的主界面上,选择“调试”选项。
接下来,选择合适的芯片型号和要调试的程序文件路径。
点击“开始调试”按钮,avrdudess将自动启动调试模式,并提供一系列调试工具,如单步执行、断点设置等。
除了以上的基本操作外,avrdudess还提供了一些高级功能,如芯片校准、锁定位操作等。
您可以在avrdudess的主界面上找到这些功能,并按照需要进行设置和操作。
AVR AT45DB161简单c语言程序

/*ATMEL的DATAFLASH操作函数库(FOR AT45DB161D)*/#include <avr/io.h>#include <util/delay.h>#include "memory.h"#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= (~_BV(bit)))#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))//这两行为AVR中操作单个IO口的宏定义unsigned char sample_read,y;unsigned char DF_buffer[6]={0x55,0x54,0x53,0x51,0x50,0x00};unsigned char DF_Rebuffer[6]={};#define UDRE0 5#define RXC0 7void Usart0_init(void) ;//设置波特率9.6k,8位数据位,无校验,接收发送使能,1位停止位void Usart0_transmit(unsigned char c);unsigned char Usart0_receive(void);void Usart0_init(void)//7.3728Mhz频率,设置波特率9.6k,8位数据位,无校验,接收发送使能,1位停止位{//UCR0=0x00; //设置波特率之前先关闭串口UCSR0B=0B00000000;UCSR0A=0B00000000;UCSR0C=0B00000110;//UCSR0C=(1<<UCSZ00)|(1<<UCSZ01); //0x06 8位数据,1位停止位,无校验UBRR0H=0;UBRR0L=47;UCSR0B=(1<<RXEN0)|(1<<TXEN0); //发送接收使能,使用查询方式,故没有使能中断}void Usart0_transmit(unsigned char c) //查询方式发送接收字符函数{while( !(UCSR0A&(1<<UDRE0)));//等待发送缓冲区为空UDR0=c;//while(!(UCSR0A&(!<<TXC0)));// UDCR0=c;// SET_BIT(UCSR0A,TXC0); //将发送结束标志位清零}unsigned char Usart0_receive( void){while (!(UCSR0A&(1<<RXC0))) ;return UDR0;}//以上是串口发送接收函数//往SPI口写一个字节的数据void write_SPI(unsigned char data){SPDR = data;while (!(SPSR & 0x80));}//将保存在数组DF_buffer[]中的一页数据写入第二缓冲区后送入主存储区//(先擦除后写入模式,页地址范围0-4095)void DF_write_page(unsigned int page){unsigned int i;DF_SPI_ON;DF_wait_busy();DF_SELECT_1;//write_SPI(0x9f)write_SPI(BUFFER_2_WRITE);write_SPI(0x00);write_SPI(0x00);write_SPI(0x00);//write_SPI(DF_buffer[0]);/*for (i=0;i<528;i++)write_SPI(DF_buffer[i]);*/for (i=0;i<6;i++)write_SPI(DF_buffer[i]);DF_DESELECT_1;if (page<4096){DF_SELECT_1;write_SPI(B2_TO_MM_PAGE_PROG_WITH_ERASE);write_SPI((unsigned char)(page>>6));write_SPI((unsigned char)(page<<2));write_SPI(0x00);DF_DESELECT_1;DF_wait_busy();}DF_SPI_OFF;}//将指定主存储器页的数据转入第一缓冲区后读出,保存在DF_buffer[]数组中//(页地址范围0-4095)void DF_read_page(unsigned int page){unsigned int i;DF_SPI_ON;while(!(DF_STA_PORT & (1<< DF_STATE)));DF_SELECT_1;write_SPI(MM_PAGE_TO_B1_XFER);write_SPI((unsigned char)(page >> 6));write_SPI((unsigned char)(page << 2));write_SPI(0x00);DF_DESELECT_1;DF_wait_busy();DF_SELECT_1;write_SPI(BUFFER_1_READ);write_SPI(0x00);write_SPI(0x00);write_SPI(0x00);write_SPI(0x00);//write_SPI(0xFF);// y = SPDR;for (i=0;i<6;i++){write_SPI(0xFF);DF_Rebuffer[i] = SPDR;}DF_DESELECT_1;DF_SPI_OFF;}//读取状态寄存器//bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0//RDY/BUSY COMP 1 0 1 1 PROTECT PAGE SIZEunsigned char DF_read_reg(void){ unsigned char temp;DF_SPI_ON;DF_SELECT_1;write_SPI(READ_STATE_REGISTER);write_SPI(0x00);write_SPI(0x00);write_SPI(0x00);write_SPI(0x00);temp=SPDR;DF_DESELECT_1;DF_SPI_OFF;return temp;}//检查状态寄存器最高位是否为忙,并等待空闲void DF_wait_busy(void){ unsigned char state_reg=0x00;DF_SELECT_1;write_SPI(READ_STATE_REGISTER);write_SPI(0x00);write_SPI(0x00);write_SPI(0x00);while((state_reg&0x80) == 0){write_SPI(0x00);state_reg = SPDR ;}DF_DESELECT_1;}int main(void){ unsigned i;PORTE=0x4f;DDRE=0xf6;PORTB=0XFF;DDRB= 0B11110111;cbi(PORTB,5);_delay_us(10);sbi(PORTB,5);//AT45DB161 ResetUsart0_init();DF_SPI_ON;DF_wait_busy();DF_SELECT_1;write_SPI(0x9f);for(i=0;i<6;i++){DF_Rebuffer[i]=SPDR;}DF_DESELECT_1;DF_SPI_OFF;while(1){ for(i=0;i<6;i++){Usart0_transmit(DF_Rebuffer[i]);_delay_ms(100);}_delay_ms(2000);}}。
使用AVRStudio设置AVR熔丝位及烧写程序

使用AVRStudio设置AVR熔丝位及烧写程序AVR Studio是ATMEL指定用于开发AVR MCU的官方软件,其编程功能最为强大。
为了能让大家一起来学习AVR Studio的配置,下面我将介绍使用AVRStudio烧写程序及熔丝快速入门。
1、●打开 AVR Studio 软件,按下图操作。
对软硬件进行初始配置,并正确设备连接,就可使用AVRISP进行联机了。
2、● 使用AVRISP方式烧写程序及配置熔丝位点击主窗口中的图标前面标有Con的那个图标。
出现如下图画面:在左边,选择“STK500 or AVRISP”,在右边,选择“Auto”(或具体的COM口),点击“Connect”进行联机。
3、●下面窗口提示所用AVR ISP下载线固件版本与当前所用软件不同,提示要求升级AVR ISP下载线固件,如版本相同就不会出现下面的提示。
如你所用的AVR ISP下载线不支持在线升级功能的话,不要点确定要不AVR ISP下载线会死在那里不动了,直接点击取消跳过此步既可。
正常联机后,将弹出如下窗口:(1)程序编程面板:●Device里面选择好对应的芯片类型,后面的Erase Device可以擦除芯片。
●Programming mode编程模式:注意这里必须是ISP mod,表示用的ISP编程模式;Erase Device Before 选项:编程前先擦除芯片,建议选上,如果不选芯片内部残留的程序可能会对新的程序造成干扰。
Verity Device After Program:下载完毕后校验程序内容,建议选上。
●Flash 下载区:Input HEX File,找到要写的hex文件格式为*.hex、*.e90。
Program,编程点此按钮,将会把Input HEX File对应文件下载到芯片中去,如果路径有错误或者文件格式不正确会有提示报警。
Verify 校验命令,用于检测芯片内程序是否和文件中的一致。
Read读命令,此命令可以读出未加密芯片内的程序,自动弹出一个对话框提示保存。
AVR程序范例(USART串口通讯)

}
}
interrupt[USART0_RXC] void usart0_rx(void)//USART接收中断处理程序
{
temp=UDR0;
usart_char_send(temp);
//-------------------------------//利用数组RsBuf来装接收到的字符串
UBRR0H = 0x00; //波特率寄存器H:
SREG = 0x80; //开总中断
}
//*********************************// ADC模块
void adc_init(void) //ADC初始化
{
ADCSRA=0xe3;//自动转换方式:ADC使能,ADC开始转换,自动触发使能,ADC预频:8分频
RsBuf[RsBytes]=temp;
RsBytes++;
if(RsBytes>10)//如果超过10个,则清零
{
for(clear=0;clear<=10;clear++)
{
RsBuf[clear]=0;
}
//flag=0;
RsBytes=0;
}
//------------------------------//
欢迎一起交流单片机,QQ:669892537
#include "mega64.h"
#include "string.h"
#define uint unsigned int
#define uchar unsigned char
AVR ATMEGA128 串口简单好使程序
//以上是串口发送接收函数
int main(void)
{
//PORTE=0B01000011;//调整让单片机的发送和接收直接连到MAX3232上
//DDRE =0B11100110;
PORTE=0B01110011;//针对本电路中的相关设置RS485通信
DDRE =0B11110110;
unsigned char temp;
Usart0_init();
while(1)
{
temp=Usart0_receive();
Usart0_transmit(temp);
//Usart0_transmit(0x5f);
}
//return 0;
}
#include <avr/io.h>
#include <avr/interrupt.h>
#include<util/delay.h>
#define UDRE0 5
#define RXC0 7
void Usart0_init(void) ;
//设置波特率9.6k,8位数据位,无校验,接收发送使能,1位停止位
UCSR0B=(1<<RXEN0)|(1<<TXEN0); //发送接收使能,使用查询方式,故没有使能中断
}
void Usart0_transmit(unsigned char c) //查询方式发送接收字符函数
{
while( !(UCSR0A&(1<<UDRE0)));//等待发送缓冲区为空
UDR0=c;
void Usart0_transmit(unsigned char c);
AVR单片机Bootloader程序

1.程序逻辑BootLoader的升级协议是基于128字节数据块的Xmodem通信协议,采用CRC16校验。
Xmodem 协议的帧格式Byte1Byte2Byte3Byte4~Byte131Byte132~Byte133控制字符包序号包序号反码128字节数据校验和升级协议具体流程:序程redaoLtooB机片单RVA下位机发送升级请求密码,等待上位机的升级密码boot96,5秒的时间内若上位机没有发送升级密码,下位机进入用户程序。
上位机有升级指令发送时,下位机间断发送’C’等待上位机接收并开始发送数据,若数据连续三次校验错误那么进入用户程序,成功发送后进入用户程序执行刚写入的程序。
2.平台及程序结构基于ATmega328PB 单片机,20M 晶振,AtmelStudio平台。
包括下图四个文件。
3.程序代码3.1.Bootloader.h 头文件#include <avr/io.h>#include <avr/wdt.h>#include <avr/boot.h>#include <avr/pgmspace.h>#ifndef BOOTLOADER_H_#defineBOOTLOADER_H_#ifndef F_CPU #define F_CPU20000000UL //20M 时钟频率#endif#define BAUDRATE 4800//串口波特率#define BAUDREG ((unsigned int)((F_CPU *10)/(16UL *BAUDRATE)-5)/10)//超时次数#define TimeOutCnt25//发送'C'的最大次数#define TimeOutCntC 10//同步时间间隔(ms)#define timeclk 200//同步密码长度#define CONNECTCNT 6//Boot 区起始地址#define BootStart 0x3C00UL //由具体硬件设置#define RS4850#ifRS485AVR单片机BootLoader程序#define RS485PORT xxxxx #define RS485TXEn xxxxx#define RS485Enable()PORTREG(RS485PORT)|=(1<<RS485TXEn)#define RS485Disable()PORTREG(RS485PORT)&=~(1<<RS485TXEn)#endif //同步密码unsigned char KEY []={'b','o','o','t','9','6',0x0E ,0x1C ,0x39,0x14,0x28,0x57,0xAA };//用户程序起始地址#define PROG_START 0x0000#define BUFFERSIZE 128#define BUFSIZE BUFFERSIZE//接收缓冲区unsigned char buf [BUFSIZE ];unsigned char bufptr ,pagptr ;unsigned char ch ,cl ;//Flash 地址unsigned int FlashAddr ;//提示信息const char msg1[20]="Waiting for password";const char msg2[8]="Time out";const char msg3[23]="Waiting to receive file";const char msg4[17]="Upgrade successed";const char msg5[14]="Upgrade failed";//Xmoden 控制字符#define XMODEM_NUL 0x00#define XMODEM_SOH 0x01#define XMODEM_STX 0x02#define XMODEM_EOT0x04#define XMODEM_ACK 0x06#define XMODEM_NAK0x15#define XMODEM_CAN 0x18#define XMODEM_EOF0x1A #define XMODEM_RWC 0x43//'C'#define DataInCom()((UCSR0A)&(1<<RXC0))#define ReadCom()UDR0#endif /*BOOTLOADER_H_*/AVR单片机BootLoader程序3.2.Bootloader.c 文件#include <avr/io.h>#include <compat/ina90.h>#include <avr/interrupt.h>#include <avr/sleep.h>#include <util/delay.h>#include <avr/pgmspace.h>#include <stdlib.h>#include "BootLoader.h"#include "usart.h"sram global ;//全局变量结构体//使用定时器1:产生以毫秒为单位的时间void TimerInit (){OCR1A =(unsigned int )(timeclk *(F_CPU /(1024*1000.0f )));//200msTCCR1A =0;//普通端口TCCR1B =(1<<WGM12)|(1<<CS12)|(1<<CS10);//CTC1024分频}//更新一个Flash 页void write_one_page (unsigned char *buf ){boot_page_erase (FlashAddr );//擦除FLASH 指定页boot_spm_busy_wait ();for (pagptr =0;pagptr <SPM_PAGESIZE ;pagptr +=2)//SPM_PAGESIZE 128{boot_page_fill (pagptr ,buf [pagptr ]+(buf [pagptr +1]<<8));//填充BootLoader 缓冲页}boot_page_write (FlashAddr );//缓冲写入FLASH 指定页boot_spm_busy_wait ();}//跳转到用户程序void quit (){boot_rww_enable ();//RWW 区读使能(*((void (*)(void ))PROG_START ))();//用户程序起始地址PROG_START 0x0000}int main (void ){AVR单片机BootLoader程序unsigned char cnt ;unsigned char packNO ;unsigned char crch ,crcl ;unsigned int crc ;unsigned char li ;_CLI ();//关中断USART_Init ();_delay_ms (1000);TimerInit ();//定时器初始化,CTC 普通端口USART_Transmit ((unsigned char *)msg1,20);//Waiting for passwordcnt =TimeOutCnt ;//超时次数255s 1s 发送一个等待密码cl =0;while (1){if (TIFR1&(1<<OCF1A ))//自动重载{TIFR1|=(1<<OCF1A );if (cl ==CONNECTCNT )//密码长度6break ;cnt --;if (cnt ==0){USART_Transmit ((unsigned char *)msg2,8);//Time outquit ();}if (cnt %5==0)USART_Transmit ((unsigned char *)msg1,20);//Waiting for password}if (DataInCom ()){if (ReadCom ()==KEY [cl ])//接收密码cl ++;elsecl =0;}}USART_Transmit ((unsigned char *)msg3,23);//Waiting to receive file cnt =TimeOutCntC ;//发送'C'超时次数10while (1){AVR单片机BootLoader程序if (TIFR1&(1<<OCF1A )){TIFR1|=(1<<OCF1A );WriteCom (XMODEM_RWC );//发送'C'cnt --;if (cnt ==0){USART_Transmit ((unsigned char *)msg2,8);//Time out quit ();}}if (DataInCom ()){if (ReadCom ()==XMODEM_SOH )//接收数据SOH 0x01break ;}}TCCR1B =0;packNO =0;cnt =0;FlashAddr =0x0000;do {packNO ++;bufptr =0;ch =WaitCom ();cl =~WaitCom ();if ((packNO ==ch )&&(packNO ==cl )){WriteCom (XMODEM_ACK );for (li =0;li <BUFFERSIZE ;li ++)//接收128个字节数据buf [bufptr ++]=WaitCom ();crch =WaitCom ();crcl =WaitCom ();crc =crc16(buf ,BUFFERSIZE );//CRC 校验ch =crc /256;cl =crc %256;if ((crch ==ch )&&(crcl ==cl ))//如果校验符合{if (FlashAddr <BootStart ){write_one_page (buf );//写flash 写一页FlashAddr +=SPM_PAGESIZE ;AVR单片机BootLoader程序}WriteCom (XMODEM_ACK );//发送ACKcnt =0;}else {WriteCom (XMODEM_NAK );//发送NAK cnt ++;}}else {WriteCom (XMODEM_NAK );//发送NAKcnt ++;}if (cnt >3)//无应答次数break ;}while (WaitCom ()!=XMODEM_EOT );//等待全部接收XMODEM_EOT 0x04WriteCom (XMODEM_ACK );_delay_ms (50);if (cnt ==0){USART_Transmit ((unsigned char *)msg4,17);//升级成功Upgrade successedquit ();}else {USART_Transmit ((unsigned char *)msg5,14);//Upgrade failed while (1);//应该是升级失败不让进入用户程序避免程序错乱带来不必要的麻烦}quit ();//跳转到用户程序return 0;}3.3.usart.h 头文件#ifndef USART_H_#define USART_H_#define RS485_RX PORTD &=~((1<<PORTD2)|(1<<PORTD3))//Receiving #define RS485_TXPORTD |=(1<<PORTD2)|(1<<PORTD3)//Transmitting#define RS485_HIGHZ PORTD |=(1<<PORTD3);PORTD &=~(1<<PORTD2)//High-Z void USART_Init (void );//串口初始化AVR单片机BootLoader程序unsigned char WaitCom ();//接收单字节void WriteCom (unsigned char dat );//发送单字节void USART_Transmit (unsigned char *data ,char num );//发送函数unsigned int crc16(unsigned char *buf ,unsigned char n );//CRC 校验//#define IDEL 0x00//#define ID_ACCORD 0X01//#define COMMAND 0x02//#define READ_COMMAND 0x03//#define WRITE_COMMAND 0x04#define TRANSMITTING 0x10//#define DATA_READY 0x08//#define KEY_MODE 0x07//按键模式//#define GetFreq_MODE 0x80//测试模式//#define BOOTLAODER_MODE 0xf0//Booterloader 升级#define USARTBUFNUM GPIOR1//串口字节个数typedef struct {unsigned char ptr ;unsigned char state ;unsigned char command ;unsigned char savestate ;//保存状态unsigned char *usartbuf ;unsigned char comBuffer [150];}sram ;extern sram global ;//全局变量结构体#endif /*USART_H_*/art.c 文件#include <avr/io.h>#include <compat/ina90.h>#include <avr/interrupt.h>#include <avr/sleep.h>#include <util/delay.h>#include <avr/wdt.h>#include "usart.h"//#include "wdtg.h"SIGNAL (USART0_RX_vect ){}AVR单片机BootLoader程序SIGNAL (USART0_UDRE_vect ){}SIGNAL (USART0_TX_vect ){}void USART_Init (void ){DDRD |=(1<<DDD1)|(1<<DDD2)|(1<<DDD3);//485芯片控制引脚输出PORTD |=(1<<PORTD2)|(1<<PORTD3);//184芯片引脚控制输出高TX PORTD |=(1<<PORTD1)|(1<<PORTD0);//TX 输出高,RX 上拉输入//UBRR0=143;//4800UBRR0=259;//1434800(11059200/16/4800-1)UCSR0B =(1<<RXEN0);//串口0接收使能UCSR0C =(1<<UCSZ01)|(1<<UCSZ00);RS485_RX ;}unsigned char WaitCom (){while (!(UCSR0A &(1<<RXC0)));return UDR0;}void WriteCom (unsigned char dat ){RS485_TX ;/*发送状态*/UCSR0B =(1<<TXEN0);/*发送使能*/UDR0=dat ;while (!(UCSR0A &(1<<TXC0)));UCSR0A |=(1<<TXC0);RS485_RX ;/*接收状态*/UCSR0B =(1<<RXEN0);/*接收使能*/}void USART_Transmit (unsigned char *data ,char num ){char i ;RS485_TX ;/*发送状态*/UCSR0B =(1<<TXEN0);/*发送使能*/for (i =0;i <num ;i ++){while (!(UCSR0A &(1<<UDRE0)));/*等待数据寄存器为空*/AVR单片机BootLoader程序UDR0=*data ;data ++;}UCSR0B =(1<<TXEN0);/*发送使能*/while ((UCSR0A &(1<<TXC0))==0);/*等待发送结束*/UCSR0A |=(1<<TXC0);/*发送结束标志位清零*/RS485_RX ;/*接收状态*/UCSR0B =(1<<RXEN0);/*接收使能*/}//CRC 校验unsigned int crc16(unsigned char *buf ,unsigned char n ){unsigned char j ;unsigned char i ;unsigned int crc ,t ;crc =0;for (j =n ;j >0;j --){crc =(crc ^(((unsigned int )*buf )<<8));for (i =8;i >0;i --){t =crc <<1;if (crc &0x8000)t =t ^0x1021;crc =t ;}buf ++;}//ch =crc /256;//cl =crc %256;return crc ;}AVR单片机BootLoader程序。
WM8978音频编解码器同时录制与放音的AVR程序
WM8978音频编解码器同时录制与放音的AVR程序简介本文档旨在介绍如何在AVR单片机上编写程序,实现对WM8978音频编解码器的同时录制和放音功能。
WM8978是一种集成了ADC(模拟到数字转换)和DAC(数字到模拟转换)功能的音频编解码器,可用于音频处理和声音录制。
硬件要求实现该功能需要以下硬件设备:1. AVR单片机(例如ATmega328P)2. WM8978音频编解码器模块3. 麦克风4. 扬声器或耳机AVR程序设计以下是基本的AVR程序设计步骤:1. 配置WM8978模块:- 初始化I2C总线- 设置WM8978的寄存器以配置音频输入和输出的参数,如采样率和音量控制2. 配置AVR单片机:- 初始化I2C总线- 设置AVR单片机的ADC和DAC参数- 配置外部中断(用于触发录制和播放操作)3. 录制音频:- 监听外部中断触发录制信号- 从WM8978的ADC寄存器读取音频样本- 将音频样本存储到AVR单片机的内存或外部存储器4. 播放音频:- 监听外部中断触发播放信号- 从AVR单片机的内存或外部存储器读取音频样本- 将音频样本写入WM8978的DAC寄存器5. 循环执行录制和播放操作,以实现同时录制和放音功能。
注意事项在设计AVR程序时,需要注意以下事项:- 确保正确配置WM8978和AVR单片机的参数,以保证音频的质量和兼容性。
- 调试程序时,可以采用逐步调试和输出调试信息的方式,确保程序正确运行。
- 注意处理音频数据的采样率和格式,以适应WM8978和AVR 单片机的要求。
总结本文档介绍了在AVR单片机上编写程序,实现对WM8978音频编解码器的同时录制和放音功能的基本步骤。
通过正确配置硬件设备和合理设计程序,可以实现高质量的音频录制和播放操作。
在实际应用中,可以进一步优化程序和功能,满足具体需求。
AVR单片机教程

AVR单片机教程一、AVR单片机的基本概念AVR(Alf and Vegard's RISC processor)是一种基于精简指令集(RISC)架构的微控制器,由爱尔兰的Atmel公司开发。
AVR系列微控制器以其高性能和低功耗而闻名,常用于嵌入式系统中。
AVR单片机使用C 语言进行编程,可以通过简单的指令完成各种功能。
二、AVR单片机的硬件结构AVR单片机由一个中央处理单元(CPU)、存储器、输入输出(IO)端口和定时器等组成。
其中,CPU是控制单元,负责执行指令;存储器用于存储程序和数据;IO端口用于与外部设备进行数据交互;定时器用于生成时间延迟。
三、AVR单片机的编程方法1. 安装开发环境:首先,需要安装一个开发环境,如Atmel Studio 等。
安装完成后,打开开发环境并创建一个新项目。
2.配置项目:在创建新项目后,需要配置项目的属性。
包括选择单片机型号、时钟频率等。
3.编写程序:使用C语言编写单片机程序。
可以通过调用库函数实现各种功能,如控制IO口、定时器等。
编写程序时,需要注意编码规范和注释。
4.编译程序:编写完程序后,需要将其编译成机器语言。
在开发环境中,可以通过点击编译按钮来完成编译。
5.烧录程序:将编译好的程序烧录到单片机中。
可以使用外部编程器或直接通过IDE进行烧录。
6.调试程序:将程序烧录到单片机后,可以进行调试。
可以通过添加断点、监视变量等方式来进行调试,以查找和修复错误。
四、AVR单片机的应用示例```c#include <avr/io.h>#include <avr/delay.h>void delayMs(uint16_t delay)while (delay--)_delay_ms(1);}int main(void)DDRA,=(1<<PA0);//将引脚PA0设置为输出while (1)PORTA,=(1<<PA0);//输出高电平delayMs(500); // 延时500msPORTA&=~(1<<PA0);//输出低电平delayMs(500); // 延时500ms}return 0;```以上示例代码实现了一个LED灯的闪烁,通过控制引脚PA0的电平状态来控制LED灯的亮灭。
AVR单片机C语言编程

输入输出端口的电压范围通常为0-5V。
输入输出端口的编程实例
• 以下是一个简单的AVR单片机输入输出端口的C语言编程示例
输入输出端口的编程实例
```c
int main(void)
输入输出端口的编程实例
{
DDRB |= (1 << DDB0); // 设置PB0为输出端口
串口发送数据
使用AVR单片机的发送缓冲寄存器,可以将数据发送到串口。
串口接收数据
使用AVR单片机的接收缓冲寄存器,可以接收来自串口的数据。
串口通信的扩展方法
扩展串口通信协议
根据实际需要,可以扩展串口通信协议,增加数据 传输的效率和可靠性。
多设备串口通信
通过多设备串口通信技术,可以实现多个设备之间 的数据传输和共享。
网络化串口通信
将串口通信与网络技术结合,可以实现远程控制和 数据传输。
06
AVR单片机的中断处理控 制
中断处理的工作原理
中断源
01
02
03
中断优先级
中断向量
AVR单片机具有多种中断源,包 括定时器/计数器中断、外部中 断、串行通信中断等。
多个中断同时发生时,需要根据 中断优先级来决定哪个中断先被 处理。
看门狗定时器控制
总结词
通过AVR单片机的C语言编程,可以实现看门狗定时器的控制。
详细描述
AVR单片机的看门狗定时器是一种用于系统恢复的机制。在C语言编程中,可 以使用内置的定时器/计数器或外部中断,实现对看门狗定时器的控制。
系统时钟设置控制
总结词
通过AVR单片机的C语言编程,可以实现对系统时钟 的设定和控制。
AVR教程系列一(4):AVRStudio仿真调试快速入门
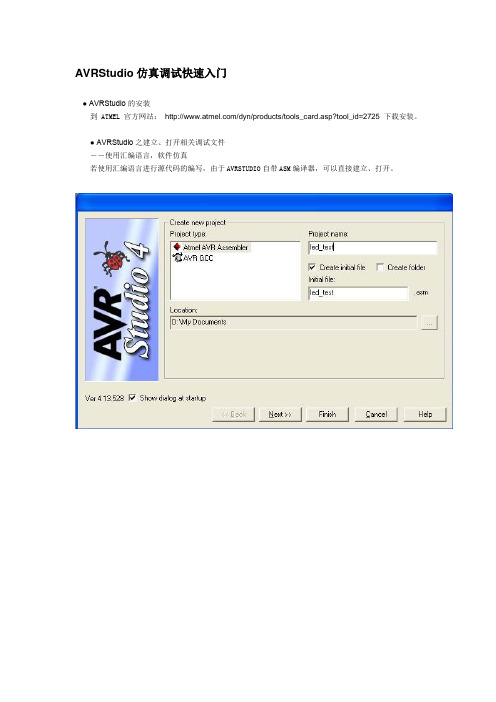
AVRStudio仿真调试快速入门● AVRStudio的安装到 ATMEL 官方网站:/dyn/products/tools_card.asp?tool_id=2725 下载安装。
● AVRStudio之建立、打开相关调试文件--使用汇编语言,软件仿真若使用汇编语言进行源代码的编写,由于AVRSTUDIO自带ASM编译器,可以直接建立、打开。
接着,进行代码编写,之后按进行编译。
--使用ICCAVR,软件仿真若使用C进行编写,由于AVRSTUDIO不带C编译器,所以需要打开相应的调试文件。
打开*.COF(使用ICCAVR编译器编写源代码)或*.D90文件(使用IAR编译器编写源代码)。
这类文件与您需要调试的*.C文件所处同一文件夹。
下面以ICCAVR为例,进行介绍。
接着,保存*.aps文件,改文件将记录目标芯片、文件路径等信息。
在打开项目文件的时候,如下图:选择“AVR Simulator”,右边选择实际使用的器件型号,之后点击“Finish”即可进行软件仿真。
选择完成后,即可进行仿真调试了。
--使用JTAGICE仿真器,硬件仿真与软件仿真不同的是:在打开项目文件的时候,如下图:选择“JTAG ICE”,其它的步骤与软件仿真一致,见上。
--使用JTAG ICE mkII仿真器,硬件仿真与软件仿真不同的是:在打开项目文件的时候,如下图:选择“JTAG ICE”,其它的步骤与软件仿真一致,见上。
● AVRStudio之调试程序下面简单介绍使用AVRStudio进行仿真调试调试控制栏调试控制栏可以控制程序的执行状态,所有的调试控制都可以由菜单,快捷键和调试工具栏实现。
注意!如果在目标文件中含有有效的源码级信息,所有的调试操作将一直继续执行,直到到达第一条用户源代码语句.如果没有遇到用户源代码语句,程序将继续执行。
如果要停止程序的运行,必须在发出停止命令前转换到反汇编模式。
1.开始调试(Start Debugging)此命令将启动调试模式,并使所有的调试控制命令处于有效。
AVR简单的串口通信程序

AVR简单的串口通信程序
本例子是学习AVR 的串口通信时候编写的一个简单的串口通信的程序,运行的时候先向串口发送一个数据0x12,然后等待接收,当PC 机发送一个数据到单片机,单片机就对这个数据进行加1 处理,然后发回到PC 机显示。
以下是串口通信时候的界面和串口通信的源程序。
/***********************************************/
/************AVR USART 串口调试****************/
/************ClimberWin 2008.6.29**************/
/*CPU:ATMEGA32L 4MHZ 外部晶振(熔断位需要先配置好外部晶振)*/ /*说明:AVR 串口是通过UDR 发送出去的,类似于51 单片机的SBUF*/
/*程序功能:能够通过串行数据发送给PC 机0x12 数据,接收上位机数据并且+1 后发送回上位机*/
#include //AVR I/O 口定义头文件
#include // 延时头文件调用
#include interrupt.h> // 中断头文件调用
#define uchar unsigned char
//引脚定义
#define AVR_RXD 0 //PD0 RXD
#define AVR_TXD 1 //PD1 TXD
//常量定义
#define BAUDRATE 9600 //波特率定义
uchar UART_MID; //定义一个缓存区数据临时存储地址
/*******************串口接收中断服务程序*************************/。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
void main()
{
PORTA = 0x0F; //给PA口赋值,让PA口低四位为1,高四位为0
while(1)
;
}
本程序的作用是把PA口的值设为0x0F。
1、程序中以井号开头的语句#include <iom16v.h> 是包含特定的头文件,叫预处理指令,i0m16v表示使用的是mega16,macros.h包含了必须的avr操作命令。
AVR_IO PORTA CSR IT0 temp1
注意:不能以数字开头的字符串做标识符。比如 1abc 是不合法的。
C语言的合法标识符有一部分被编译器保留作为特殊用途,这样的标识符称为关键字。C语言o break case char const continue default do double else enum extern float for goto if int long register return short signed
#include <delay.h> // 包括延时函数定义的头文件,使用延时函数时不能缺少
void main(void)
{
// 定义PortC口的工作方式
PORTC=0x01; // PC口的第0位输出"1",LED不亮
DDRC=0x01; // 定义PC口的第0位为输出方式
4、C程序中可以加入一些说明文字,单行以双斜扛“//”开始,如果是多行,就用"/*"开始,以“*/”结束,如 /*注释 */ 。
5、函数可以有参数,一律放在小括号内。
6、利用C语言可以轻松的对AVR的设备组件进行操作,如程序中的PORTA = 0x0F;
7、任何一个AVR C程序都必须是一个无限循环,否则程序会沿着程序存储区一直运行,直至溢出程序存储区,程序从头运行。
sizeof static struct switch typedef union unsigned void volatile while
注意,原则上除关键字外,可以使用任何有效的标识符。但实际上,根据系统不同,有些特殊标识符具有特殊含义,不应被使用。在AVR里,一些端口的名称、寄存器的名称已经被系统定义,最好不要改变其定义,如PORTA DDRA TIMASK 等。
// 主循环
while (1)
{
delay_ms(1000); // 调用CVAVR提供的毫秒延时函数,延时1s
PORTC.0 = ~PORTC.0; // PC口第0位输出取反
};
}
一个简单的AVR程序
#include <iom16v.h>
2、长整型类型:长整型(long int)类型的二进制编码是32位。有符号的长整型类型(long)表示范围-231~231-1;无符号的类型(unsigned long)的表示范围为0~232-1。
3、超长整数类型:超长整数类型(long long)的二进制编码是64位。有符号的长整型类型(long)表示范围-263~263-1;无符号的类型(unsigned long)的表示范围为0~264-1。
一些特殊的字符串的表示方法:以反斜扛加特定字符。如 ' \n ' 回车符; ‘ \" ’ 双引号; ‘ \' ’ 单引号字符; ‘ \\ ’ 反斜杠。
无符号的字符类型: char 表示范围 0~255。
有符号的字符类型: signed char表示范围-128~127。
�
整数类型的类型名前可加修饰符unsigned和signed,表示无符号数和有符号数,其中unsigned可以省略,默认表示无符号数,一般来说,尽量使用无符号数可以节约资源。
以下三种为整数类型:
1、整数类型:一般类型的整型 int,16位二进制编码,表示的数0~65536,及216。有符号类型,signed int 表示范围-32768~32767。
2、AVR C语言的基本字符、标识符和关键字
avr c语言和普通c语言一样,基本字符有阿拉伯数字0~9;大小写拉丁字母a~z和A~Z;一些选定的可打印字符,如"~!@#¥%^&*()_-+={}[],.;<>/?|\";空格符、换行符和制表符这三种空白符起到分割成分和编排格式的作用。
对系统对象命名,称为标识符。标识符由数字、字母、下划线组合的字符串序列构成,字母区分大小写。如下都是合法的表示符:
/*********************************************
Demo_5_2.c
Chip type : ATmega16
Program type : Application
Clock frequency : 4.000000 MHz
2、C语言的程序是由函数构成的,如上面的那个void main(),前面的void表明函数没有返回值。每一个c程序里面里有且只有一个main()函数,系统启动后就从main()开始运行。
3、函数内部的内容以大括号“{”和"}"扩起来,每句语句用分号“;”结束,若分号前面没有内容,编译之后也无任何操作语句。
以下为实数类型(浮点数类型):
1、单精度浮点数类型:float,用32位二进制数表示。
2、双精度浮点数类型:long double,用64位二进制数表示。
字符类型和字符串
字符类型的类型名为char,目前最常用的是ASCII字符集,其中字符包扩所有的大小写字母,数字,常用字符等共计128割字符。扩展的ASCII字符集包括256个字符,字符类型占用一个字节。
Memory model : Small
External SRAM size : 0
Data Stack size : 256
*********************************************/
#include <mega16.h> // 包括器件配置定义的头文件,不能缺少
3、数据类型
C语言严格规定数据类型,AVR资源有限,如果数据类型选用不好,资源很快就会耗尽。如,尽量不要使用浮点类型的运算,1.2*1.2的浮点数运算至少要占用mega16的百分之十以上的空间。
选择数据类型时需要注意不要操作数据能表示的范围,比如要表示60000,就不能用char,必须用int。