Simulink建模方法
matlab simulink模型搭建方法
matlab simulink模型搭建方法Matlab Simulink是一个强大的多领域仿真和模型搭建环境,广泛应用于控制系统、信号处理、通信系统等多个领域。
本文将详细介绍Matlab Simulink模型搭建的方法,帮助您快速掌握这一技能。
一、Simulink基础操作1.启动Simulink:在Matlab命令窗口输入“simulink”,然后按回车键,即可启动Simulink。
2.创建新模型:在Simulink开始页面,点击“新建模型”按钮,或在菜单栏中选择“文件”→“新建”→“模型”,创建一个空白模型。
3.添加模块:在Simulink库浏览器中,找到所需的模块,将其拖拽到模型窗口中。
4.连接模块:将鼠标光标放在一个模块的输出端口上,按住鼠标左键并拖拽到另一个模块的输入端口,松开鼠标左键,完成模块间的连接。
5.参数设置:双击模型窗口中的模块,可以设置模块的参数。
6.模型仿真:在模型窗口中,点击工具栏上的“开始仿真”按钮,或选择“仿真”→“开始仿真”进行模型仿真。
二、常见模块介绍1.源模块:用于生成信号,如Step、Ramp、Sine Wave等。
2.转换模块:用于信号转换和处理,如Gain、Sum、Product、Scope 等。
3.控制模块:用于实现控制算法,如PID Controller、State-Space等。
4.建模模块:用于构建物理系统的数学模型,如Transfer Fcn、State-Space等。
5.仿真模块:用于设置仿真参数,如Stop Time、Solver Options等。
三、模型搭建实例以下以一个简单的线性系统为例,介绍Simulink模型搭建过程。
1.打开Simulink,创建一个空白模型。
2.在库浏览器中找到以下模块,并将其添加到模型窗口中:- Sine Wave(正弦波信号源)- Transfer Fcn(传递函数模块)- Scope(示波器模块)3.连接模块:- 将Sine Wave的输出端口连接到Transfer Fcn的输入端口。
simulink数学公式建模

simulink数学公式建模(最新版)目录1.Simulink 简介2.Simulink 与数学公式建模3.Simulink 建模步骤4.Simulink 建模实例5.Simulink 在数学公式建模中的优势与局限正文一、Simulink 简介Simulink 是一款由 MathWorks 公司开发的与 MATLAB 兼容的仿真环境,主要用于动态系统的建模、仿真和分析。
用户可以利用 Simulink 提供的丰富函数库和图形化界面,轻松地搭建和修改模型。
二、Simulink 与数学公式建模Simulink 在数学公式建模领域具有广泛的应用。
用户可以在Simulink 中直接编写 MATLAB 数学公式,还可以通过拖拽式的操作完成复杂数学公式的建模。
这使得 Simulink 在数学公式建模过程中既具有高度的灵活性,又降低了建模的难度。
三、Simulink 建模步骤1.打开 Simulink 软件,创建一个新的模型。
2.从 Simulink 函数库中选择适当的函数模块,根据需要搭建系统模型。
3.添加 MATLAB 数学公式,可以通过点击工具栏中的“New Math Function”按钮实现。
4.将建好的模型进行仿真,通过观察仿真结果来验证模型的正确性。
5.根据需要调整模型参数,以满足不同问题的求解需求。
四、Simulink 建模实例以一个简单的一阶 RC 电路为例,我们可以通过 Simulink 进行数学公式建模。
首先,在 Simulink 中添加电阻和电容元件,然后添加一个电压源。
接下来,使用 MATLAB 数学公式建立电路的微分方程,最后进行仿真,可以得到电路的电压 - 时间曲线。
五、Simulink 在数学公式建模中的优势与局限优势:1.Simulink 具有丰富的函数库,可以满足各种建模需求。
2.图形化界面使得建模过程更加直观、便捷。
3.可以直接编写 MATLAB 数学公式,便于实现复杂数学模型。
如何使用MATLABSimulink进行系统建模
如何使用MATLABSimulink进行系统建模如何使用MATLAB Simulink进行系统建模第一章:MATLAB Simulink简介Matlab Simulink是一款基于MATLAB的工程工具软件,用于进行系统建模和仿真。
它提供了一种直观的图形化方法,使工程师能够轻松地建立和模拟复杂的系统。
Simulink支持各种工程学科,包括电气、机械、控制和通信等领域。
本章将简要介绍MATLAB Simulink的基本概念和主要功能。
1.1 Simulink的基本概念Simulink使用图形化的方式进行系统建模,系统模型由各种元件和信号线组成。
元件表示系统的各个组成部分,信号线表示元件之间的数据传输。
1.2 Simulink的主要功能Simulink具有以下主要功能:- 系统建模:通过拖拽和连接元件,可以快速搭建系统模型。
- 仿真和调试:使用仿真器可以对系统模型进行实时仿真,并进行调试和分析。
- 自动代码生成:Simulink可以自动生成C、C++、Verilog等编程语言的代码,可用于系统的实现和验证。
第二章:Simulink建模基础在本章中,我们将详细介绍如何使用Simulink进行系统建模的基础知识和技巧。
2.1 模型创建在Simulink中,可以通过选择“File -> New Model”来创建一个新的模型。
在模型中,可以使用工具栏上的元件库来选择需要的元件,然后将其拖拽到模型中。
2.2 连接元件在模型中,元件之间的连接通常使用信号线来表示。
可以通过鼠标点击元件输出端口和输入端口的方式来建立连接。
可以使用线段工具来绘制信号线,也可以使用Ctrl + 鼠标点击来删除信号线。
2.3 参数设置在建模过程中,可以通过双击元件来设置各个元件的参数。
每个元件都有各自的参数面板,可以根据具体需求进行设置。
第三章:Simulink高级建模技巧在本章中,我们将介绍一些进阶的Simulink建模技巧,如子系统的使用、模型的分层和复用等。
simulink建模与仿真流程

simulink建模与仿真流程我们需要在Simulink中创建一个新的模型。
打开Simulink软件后,选择“File”菜单中的“New”选项,然后选择“Model”来创建一个新的模型。
接着,我们可以在模型中添加各种组件,如信号源、传感器、执行器等,以及各种数学运算、逻辑运算和控制算法等。
在建模过程中,我们需要定义模型的输入和输出。
在Simulink中,可以使用信号源模块来定义模型的输入信号,如阶跃信号、正弦信号等。
而模型的输出信号可以通过添加显示模块来实现,如示波器模块、作用域模块等。
接下来,我们需要配置模型的参数。
在Simulink中,可以通过双击组件来打开其参数设置对话框,然后根据需求进行参数配置。
例如,对于控制系统模型,我们可以设置控制器的增益、采样时间等参数。
完成模型的配置后,我们可以进行仿真运行。
在Simulink中,可以选择“Simulation”菜单中的“Run”选项来运行仿真。
在仿真过程中,Simulink会根据模型的输入和参数进行计算,并生成相应的输出结果。
我们可以通过示波器模块来实时显示模型的输出信号,以便进行结果分析和调试。
在仿真过程中,我们可以通过修改模型的参数来进行参数调优。
例如,可以改变控制器的增益值,然后重新运行仿真,观察输出结果的变化。
通过不断调整参数,我们可以优化模型的性能,使其达到设计要求。
除了单一模型的仿真,Simulink还支持多模型的联合仿真。
通过将多个模型进行连接,可以实现系统级的仿真。
例如,我们可以将控制系统模型和物理系统模型进行连接,以实现对整个控制系统的仿真。
在仿真完成后,我们可以对仿真结果进行分析和评估。
Simulink提供了丰富的分析工具,如频谱分析、时域分析和稳定性分析等。
通过对仿真结果的分析,我们可以评估模型的性能,并进行进一步的改进和优化。
Simulink建模与仿真流程包括创建模型、添加组件、定义输入输出、配置参数、运行仿真、参数调优、联合仿真和结果分析等步骤。
MATLAB使用Simulink 进行建模与仿真方法

方法/步骤
第一步:我们打开MATLAB软件,然后 在命令窗口中输入simulink或点击左 上角的【新建】,然后选择 【simulink Model】,如下图所示。
方法/步骤
第二步:此时将进入如下图所示的 Simulink界面,我们点击工具栏中的 【Library Browser】,如下图所示。
方法/步骤
第五步:基本的仿真模型需要信号发 生装置,我们可以选择如下图所示的 各种信号发生器,如正弦波信号发生 器,我们将其拖动到仿真模型框图。
方法/步骤
第六步:有了信号发生装置,作为一 个合理的仿真模型则必有信号接收与 显示装置,如下图所示,我们可以选 择Scope进行波形显示。
方法/步骤
第七步:我们选择好基本的输入输出 装置后,如下图所示,我们在仿真模 型框图中布局好装置位置并进行连线。
方法/步骤
第八步:仿真模型连线完毕后,检查 无误后我们就可以按下【Run】按钮, 运行我们的仿真程序了,如下图所示, 我们可以在显示器件中观察仿真结果, 并进行模型调整与修改。
注意事项
Simulink是 MATLAB很强大的系统建模、仿真和分析功能组件,上述方法、步骤只介绍了使用 Simulink搭建最基础的输入输出模型。
参考资料:Matlab/Simulink通信系统建模与仿真实例分析
《Matlab/Simulink通信系统建模与仿真实例分析》是2008年清华大学出版的一本图书,作者是 邵玉斌。
参考资料:基于matlab/simulink的通信系统建模与仿真(十三五)
《基于matlab/simulink的通信系统建模与仿真(十三五)》是2017年10月北京航空航天大学出 版社出版的图书,作者张瑾,周原,姚巧鸽,赵静。本书以MATLAB R2016a为平台,通过大量的 MATLAB、Simulink仿真实例,加深读者对通信系统原理的理解。
如何使用MATLABSimulink进行动态系统建模与仿真

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
matlab之simulink最通俗教程

matlab之simulink最通俗教程Simulink是MATLAB的一个重要工具箱,用于建模和仿真控制系统。
Simulink提供了一种图形化建模环境,可以方便地构建复杂系统,并对其进行仿真和分析。
本文将详细介绍Simulink的基本原理和使用方法,以便初学者快速入门。
Simulink模型由各种模块组成,这些模块可以是系统组件、数学算法或信号处理函数。
用户可以使用Simulink库中的预定义模块,也可以自己编写MATLAB函数来创建自定义模块。
模块之间的连接通过信号线进行,可以传递各种类型的信号,如数值、布尔值和字符串。
使用Simulink建模的第一步是创建一个新模型。
在MATLAB命令窗口中输入“simulink”命令即可打开Simulink库浏览器。
然后,可以从左侧的“Simulink Library Browser”面板中拖动所需的模块到模型窗口中。
常用的模块包括输入输出模块、数学运算模块和逻辑控制模块。
在模型中添加模块后,可以使用鼠标将它们连接在一起。
要创建连接线,只需点击模块输出端口并将鼠标拖动到另一个模块的输入端口。
连接线将自动连接两个模块,形成信号传递路径。
连接线上可以添加箭头标记,用于指定信号的流动方向。
模型的参数和设置可以在模型窗口的右侧“Properties”面板中进行调整。
例如,可以设置模块的初始状态、仿真时间范围和采样时间。
还可以为模块添加注释、设置显示颜色和调整模块大小等。
Simulink提供了多种仿真和分析工具,用于评估模型的性能和行为。
可以使用“Simulate”按钮开始仿真并观察模型的实时响应。
仿真结果可以以图表或波形图的形式显示,并可以保存和导出到MATLAB工作空间中进行后续处理。
还可以使用模型验证和优化工具来检查模型的准确性和效率。
除了基本的建模和仿真功能外,Simulink还支持代码生成和硬件连接。
可以将Simulink模型转换为C代码,并嵌入到嵌入式系统中。
simulink操作技巧
simulink操作技巧Simulink操作技巧Simulink是一种基于模块化的图形化建模工具,广泛应用于系统仿真和控制设计领域。
作为一种功能强大的工具,Simulink提供了许多操作技巧,使用户能够更高效地进行建模和仿真。
本文将介绍一些常用的Simulink操作技巧,帮助读者更好地利用这一工具。
1. 使用子系统进行模块化设计子系统是Simulink中的一种重要概念,它可以将复杂的系统模型划分为多个模块,使得模型更加结构化和易于理解。
通过使用子系统,用户可以将模型按照功能进行分组,提高模型的可维护性和重用性。
在设计模型时,可以使用右键菜单中的“Subsystem”选项来创建子系统,并通过拖拽和连接模块来构建子系统的内部结构。
2. 使用模块复制功能快速搭建模型Simulink提供了模块复制功能,可以快速复制一个或多个模块,并将其粘贴到模型中的其他位置。
使用模块复制功能可以有效地减少模型构建的时间,并且可以确保复制的模块具有相同的参数和连接关系。
在复制模块时,可以使用快捷键Ctrl+C和Ctrl+V,或者通过右键菜单中的“Copy”和“Paste”选项来实现。
3. 使用信号线标签和颜色进行信号识别在复杂的模型中,信号线的标签和颜色可以帮助用户更好地识别和理解信号的传递和处理过程。
Simulink提供了信号线标签和颜色设置功能,用户可以通过右键菜单中的“Properties”选项来编辑信号线的属性。
在设置信号线标签时,可以使用清晰明了的命名规则,使得信号线的作用和含义一目了然;而通过设置不同的颜色,可以将不同类型的信号区分开来,提高模型的可读性。
4. 使用模型参考进行模块复用模型参考是Simulink中的一种高级技术,可以实现模块的复用和分布式设计。
通过模型参考,用户可以将一个模型作为子系统嵌入到另一个模型中,并在不同的模型之间进行信号传递和数据共享。
使用模型参考可以提高模型的可维护性和重用性,减少模型重复建设的工作量。
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
如何使用MATLAB的Simulink进行系统建模

如何使用MATLAB的Simulink进行系统建模第一章:Simulink概述1.1 Simulink的定义和作用1.2 Simulink的特点和优势第二章:Simulink的基本操作2.1 Simulink的工作环境介绍2.2 模型的创建和保存2.3 模块的选择和添加2.4 参数设置和数据导入2.5 信号的连接和仿真第三章:系统建模的基本步骤3.1 确定建模目标和系统边界3.2 选择系统建模方法3.3 确定系统的输入和输出3.4 建立系统模型框图3.5 分析系统的动态特性第四章:系统建模方法介绍4.1 传递函数法4.1.1 传递函数的定义和性质4.1.2 从实验数据到传递函数的估计方法4.1.3 传递函数建模的示例4.2 状态空间法4.2.1 状态空间模型的定义和性质4.2.2 状态空间模型的建立方法4.2.3 状态空间建模的示例4.3 基于仿真数据的建模方法4.3.1 仿真数据的获取和处理4.3.2 仿真数据建模的步骤4.3.3 仿真数据建模的示例第五章:模型的验证与调整5.1 信号的响应分析5.2 参数的优化和调整5.3 模型的准确性评估5.4 系统建模的误差分析第六章:案例分析6.1 控制系统的建模6.1.1 PID控制系统的建模方法6.1.2 模型预测控制系统的建模方法6.1.3 自适应控制系统的建模方法6.2 通信系统的建模6.2.1 数字调制解调系统的建模方法6.2.2 无线信号传输系统的建模方法6.2.3 混合信号处理系统的建模方法第七章:Simulink在实际工程中的应用7.1 电力系统的建模和分析7.2 汽车动力系统的建模和仿真7.3 机器人控制系统的建模和优化7.4 信号处理系统的建模和算法实现结语:Simulink在系统建模中的应用前景及启示。
建立简单Simulink模型——踏入仿真大门

建立简单Simulink模型——踏入仿真大门展开全文本篇文章引导大家创建一个如下的Simulink模型,并通过该模型了解Simulink建模的基本操作方法和基本步骤:示例该模型的输入为一个正弦波,该信号分别经过增益器放大和积分器积分,标注为Scope的示波器显示输入正弦波的波形,标注为Scope1的示波器显示经过增益器放大和积分器积分的波形。
接下来,跟大家分享一下创建该模型的详细过程:1. 进入Simulink start Page建立空白模型(了解如何进入Simulink start Page可查看本号上一篇文章)Simulink Start Page2. 保存该模型到任意文件夹(最好为英文路径,此步骤防止软件卡死后模型丢失,不在详述);3. 分析模型需要用到的模块,点击工具栏中的library并找到其分组:进入Library1) Sine Wavesourse 2) Scopesink3) Gainmath operations 4) Integratorcontinuout5) Muxsiginal routing4. 找到需要的模块后分别将其拖拽到模型窗口中,并摆放到合适位置,然后释放鼠标:拖拽模块到模型中拖动各模块位置5. 用鼠标拖动的方式连接sine wave 的输出端和scope的输入端:连接各模块然后按照此方法,参照实例,分别将模块连接好;6. 设置仿真时长(默认为10s)设置仿真时长7. 点击运行,就会分别得到以下波形:建立完成的模型波形到这里,这个简单的Simulink模型就建立完毕了,别忘了点保存!此模型虽小,却包含了从需求分析到建立模型,再到最后设置仿真参数,分析数据等所有Simulink需要用到的步骤,学会该模型的建立方法后,也就基本掌握了简单Simulink模型的建立方法,为以后建立复杂的仿真系统奠定基础。
(如需安装MATLAB\Simulink软件或文中示例源文件,可关注我后,私信我。
simulink 的用法
simulink 的用法
Simulink是MATLAB的一个附加组件,主要用于建模、模拟和分析动态系统。
以下是一些Simulink的基本用法:
1.打开Simulink:在MATLAB命令窗口中输入“simulink”,然后按Enter
键。
这将打开Simulink的库浏览器。
2.创建新模型:在Simulink的库浏览器中,单击“Blank Model”,然后
双击“New Model”。
这将打开一个新的Simulink模型窗口。
3.添加模块:在Simulink模型窗口中,可以通过单击“Library Browser”
并在其中搜索和选择所需的模块来添加模块。
4.连接模块:Simulink使用线条连接模块,并用箭头表示信号流的方向。
要连接模块,只需单击并拖动从一个模块的输出端口到另一个模块的输入端口。
5.设置模块参数:选中模块后,双击可以设置模块参数。
6.运行模拟:在完成模型构建和参数设置后,可以使用Simulink的仿
真功能运行模拟。
在Simulink工具栏上单击“Run”按钮或使用命令窗口中的相应命令开始仿真。
7.查看结果:Simulink提供了多种方式来查看模拟结果,包括示波器、
信号轨迹、图表等。
可以在Simulink的工具栏上单击相应的按钮或使用命令窗口中的相应命令来添加和打开这些查看器。
以上是Simulink的一些基本用法,具体使用方法可能因版本和具体应用而有所不同。
simulink建模及动态仿真的一些实验步骤

simulink建模及动态仿真的一些实验步骤Simulink是MATLAB中的一种可视化仿真工具,可以用于动态系统建模、仿真和分析。
以下是一些Simulink建模及动态仿真的实验步骤:启动Simulink:首先,需要打开MATLAB,然后在MATLAB 的命令窗口中输入“simulink”命令,或者点击工具栏中的Simulink 图标来启动Simulink。
新建模型:在Simulink的启动界面中,可以选择“Blank Model”来新建一个空白的模型。
也可以选择其他预设的模型模板来开始建模。
构建系统模型:在新建的模型窗口中,可以通过从Simulink 的模块库中拖拽模块到模型窗口中来构建系统模型。
模块库中包含了各种类型的模块,如源模块、接收模块、处理模块等。
将这些模块按照系统的结构和功能连接起来,形成一个完整的系统模型。
设置模块参数:对于模型中的每个模块,都可以双击打开其参数设置对话框,设置其参数和初始条件。
这些参数和初始条件将决定模块在仿真中的行为。
设置仿真参数:在模型窗口的工具栏中,可以点击“Simulation”->“Model Configuration Parameters”来打开仿真参数设置对话框。
在这个对话框中,可以设置仿真的起始和结束时间、仿真步长、求解器类型等参数。
开始仿真:完成以上步骤后,可以点击模型窗口工具栏中的“Run”按钮来开始仿真。
在仿真过程中,可以实时观察模型中各个模块的状态和输出。
分析结果:仿真结束后,可以使用Simulink提供的各种分析工具来分析仿真结果。
例如,可以使用示波器模块来显示仿真过程中某个模块的输出波形,也可以使用MATLAB的工作空间来查看和处理仿真数据。
以上步骤是一个基本的Simulink建模和动态仿真的过程。
在实际使用中,可能还需要根据具体的需求和系统特点进行一些额外的设置和调整。
simulink建模
➢ Manual Switch 手动选择开关模块
➢ Rate Limiter 比率限幅模块:限制输入信号
➢ Dead Zone 死区输出模块:在规定的区内没有输出值
➢ Quantizer 量化模块:把输入信号由平滑状态变成台阶状态
精选ppt课件
精选ppt课件
13
数学模块( Math )
➢ Sum 求和模块:加减运算 ➢ Product 乘法模块:乘运算 ➢ Dot Product 矢量的点乘模块:点乘运算 ➢ Gain 增益模块:比例运算 ➢ Math Function 常用数学函数模块:包括指数函数、对数
函数、求平方、开根号等常用数学函数 ➢ Trigonometric Function 三角函数模块:三角函数,包括
8
精选ppt课件
9
向量显示
Mux
精选ppt课件
10
标量扩展
精选ppt课件
11
Simulink模块库
在MATLAB命令窗口中输入simulink3 结果是在桌面上出现一个用图标形式显示的 Library :simulink3的Simulink模块库窗口。
两种模块库窗口界面只是不同的显示形式,用户可以根据
各人喜好进行选用,一般说来第二种窗口直观、形象,易
于初学者,但使用时会打开太多的子窗口。
精选ppt课件
12
SIMULINK模块库
SIMILINK模块库按功能进行分为以下8类子库:
➢ Continuous(连续模块) ➢ Discrete(离散模块) ➢ Function&Tables(函数和表格模块) ➢ Math(数学模块) ➢ Nonlinear(非线性模块) ➢ Signals&Systems(信号和系统模块) ➢ Sinks(输出模块) ➢ Sources(输入源模块)
simulink微分方程建模
simulink微分方程建模概述在控制系统设计中,微分方程建模是一项重要的任务。
Simulink是一款功能强大的工具,可用于构建和仿真动态系统模型。
本文将介绍如何使用Simulink进行微分方程建模,并分析模型的性能和稳定性。
为什么选择SimulinkSimulink是一种图形化建模环境,可以帮助工程师以图形方式快速描述系统行为,并自动生成相应的微分方程模型。
相比传统的手工推导模型,在Simulink中进行建模更加直观、简单、高效。
此外,Simulink还提供了丰富的工具和算法用于模型分析和优化。
Simulink建模流程步骤一:创建模型在Simulink中,首先需要创建一个新的模型。
可以通过在空白Simulink窗口中右键单击并选择“新建模型”来创建一个空模型。
步骤二:添加系统组件在模型中添加所需的系统组件,如信号源、传感器、执行器等。
可以从Simulink库浏览器中拖拽并放置这些组件。
步骤三:建立连接通过使用连接线将系统组件连接到模型中的其他组件。
连接线代表信号流动的路径。
步骤四:配置组件参数对于每个系统组件,需要配置其相应的参数。
可以通过双击组件并在参数对话框中进行设置。
步骤五:编写微分方程在模型中的某些组件上,需要编写微分方程来描述其动态行为。
可以通过两种方式完成: 1. 使用已有的数学表达式:可以直接在组件的参数框中输入数学表达式。
Simulink将自动将其转换为微分方程。
2. 使用Stateflow图表:Stateflow是Simulink的一个扩展工具,用于建模离散事件系统。
可以使用Stateflow图表绘制微分方程。
步骤六:运行仿真完成模型搭建后,可以开始进行仿真了。
点击Simulink界面上的“运行”按钮,Simulink将自动执行模型并显示输出结果。
模型分析与优化分析信号响应Simulink可以显示模型中的信号响应,如系统的步响应、频率响应等。
通过分析这些响应,可以评估系统的性能是否符合要求,并进行调整优化。
simulink系统建模
离散系统建模
• 离散系统通常是用差分方程来描述的系统,
而在实验中基本上都是采用离散采样。利 用simulink建模时,通常使用的模块有 simulink建模时,通常使用的模块有 discret模块库、math operation模块库、 discret模块库、math operation模块库、 sink模块库、source模块库等等。我们用一 sink模块库、source模块库等等。我们用一 个例子来说明在simulink中离散系统的建模。 个例子来说明在simulink中离散系统的建模。
子系统的分类
• 1.使能子系统 1.使能子系统 • 2.触发子系统 2.触发子系统 • 3.函数调用子系统 3.函数调用子系统
使能子系统
• 当控制信号为真时,子系统开始执行,也
即输入的信号为正数时,子系统开始执行。 • 以实例的形式进行讲解
触发子系统
• 触发子系统就是在控制信号符号发生变化
时执行子系统。下面以实例进行讲解。
Simulink系统建模 Simulink系统建模
1.连续系统建模 1.连续系统建模 2.离散系统建模 2.离散系统建模 3.混合系统建模 3.混合系统建模
连续系统建模
• 连续系统通常是利用微分方程描述的系统,而在现实世界 连续系统通常是利用是连续变化的.利用simulink建模时, 中的多数实际系统都是连续变化的.利用simulink建模时, 通常使用的模块有continuous模块库、math operation模 通常使用的模块有continuous模块库、math operation模 块库等等。下面以几个例子讲述在simulink中连续系统的 块库等等。下面以几个例子讲述在simulink中连续系统的 建模。 1.直接使用积分模块缺省设置 1.直接使用积分模块缺省设置 2.利用上升信号进行复位积分 2.利用上升信号进行复位积分 3.利用下降信号进行复位积分 3.利用下降信号进行复位积分 4.利用水平信号进行复位积分 4.利用水平信号进行复位积分 5.利用阶跃信号进行复位积分 5.利用阶跃信号进行复位积分
无刷直流电机simulink数学模型
无刷直流电机(BLDC,Brushless Direct Current Motor)是一种常见的电动机械,其特点是无需使用电刷来传递电流。
这种电机通常用于需要高效率和低噪音的应用中。
在Simulink中建模无刷直流电机的数学模型需要考虑电机的基本结构和工作原理。
首先,无刷直流电机主要由三个主要部分组成:转子、定子和驱动器。
转子通常由永磁体、扇形板和线圈组成。
定子则包含绕组、端盖和轴承等部件。
驱动器负责控制电机的电流和电压,从而控制电机的旋转。
在Simulink中建模无刷直流电机的数学模型,可以按照以下步骤进行:1. 建立基本模块:在Simulink库中,找到"Sources"(源)和"Math Operations"(数学操作)模块,创建电机的数学模型的基本模块,如电流源、电压源、电阻器、电感器和变压器等。
2. 创建转子位置检测模块:无刷直流电机的转子位置需要被检测和控制。
通常,使用霍尔效应传感器或其他类型的传感器来检测转子的位置。
在Simulink中,可以使用"Sensors"(传感器)模块创建转子位置检测模块。
3. 创建电机控制模块:无刷直流电机的控制通常通过PWM(脉冲宽度调制)信号来实现。
可以使用"Control Systems"(控制系统)模块中的"PWM Generator"(PWM发生器)模块来生成控制信号。
4. 建立数学模型:根据无刷直流电机的物理结构和工作原理,建立数学模型。
通常,无刷直流电机的数学模型包括电磁场理论、电路理论和运动学理论。
可以使用Simulink的代数操作和微分方程等工具来建立数学模型。
5. 连接模块:将创建的模块连接起来,形成一个完整的无刷直流电机模型。
根据实际需求,可以添加其他模块和功能,如转速测量、温度监测等。
需要注意的是,无刷直流电机的数学模型比较复杂,需要具备一定的电机工程和Simulink 建模知识。
Simulink建模方法
Simulink 建模方法在一些实际应用中,如果系统的结构过于复杂,不适合用前面介绍的方法建模。
在这种情况下,功能完善的Simulink 程序可以用来建立新的数学模型。
Simulink 是由Math Works 软件公司1990年为MATLAB 提供的新的控制系统模型图形输入仿真工具。
它具有两个显著的功能:Simul(仿真)与Link(连接),亦即可以利用鼠标在模型窗口上“画”出所需的控制系统模型。
然后利用SIMULINK 提供的功能来对系统进行仿真或线性化分析。
与MATLAB 中逐行输入命令相比,这样输入更容易,分析更直观。
下面简单介绍SIMULINK 建立系统模型的基本步骤:(1) SIMULINK 的启动:在MATLAB 命令窗口的工具栏中单击按钮或者在命令提示符>>下键入simulink 命令,回车后即可启动Simulink 程序。
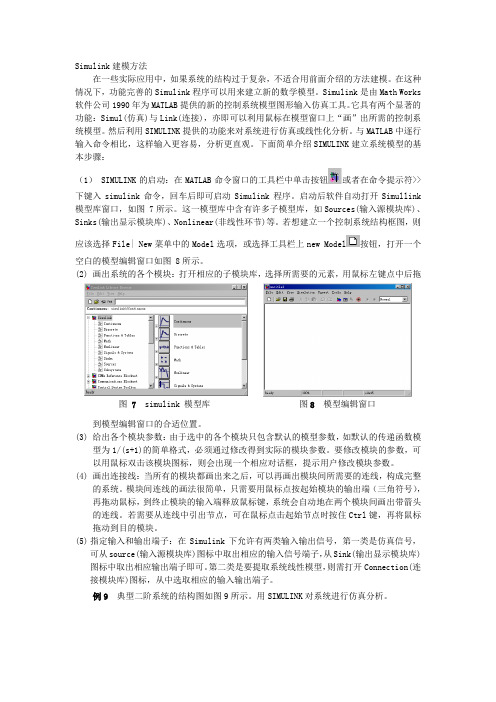
启动后软件自动打开Simullink 模型库窗口,如图 7所示。
这一模型库中含有许多子模型库,如Sources(输入源模块库)、Sinks(输出显示模块库)、Nonlinear(非线性环节)等。
若想建立一个控制系统结构框图,则应该选择File| New 菜单中的Model 选项,或选择工具栏上new Model 按钮,打开一个空白的模型编辑窗口如图 8所示。
(2) 画出系统的各个模块:打开相应的子模块库,选择所需要的元素,用鼠标左键点中后拖到模型编辑窗口的合适位置。
(3) 给出各个模块参数:由于选中的各个模块只包含默认的模型参数,如默认的传递函数模型为1/(s+1)的简单格式,必须通过修改得到实际的模块参数。
要修改模块的参数,可以用鼠标双击该模块图标,则会出现一个相应对话框,提示用户修改模块参数。
(4) 画出连接线:当所有的模块都画出来之后,可以再画出模块间所需要的连线,构成完整的系统。
模块间连线的画法很简单,只需要用鼠标点按起始模块的输出端(三角符号),再拖动鼠标,到终止模块的输入端释放鼠标键,系统会自动地在两个模块间画出带箭头的连线。
simulink数学公式建模

simulink数学公式建模Simulink是一种用于建模、仿真和分析动态系统的环境和工具。
它基于图形化编程的概念,使得用户能够通过图形界面直观地组合不同的模块来构建复杂的数学模型。
Simulink中的模型可以简化数学公式的表达,提供更直观的视觉表示,使得用户可以轻松地构建、测试和验证各种系统的行为,从而更好地理解和优化系统的性能。
在Simulink中建模数学公式时,可以通过以下方式进行:1. 使用数学运算模块:Simulink提供了多种数学运算模块,包括加法、减法、乘法、除法等基本运算模块。
用户可以利用这些模块将数学公式直接转换为Simulink中的模块,并通过连接线将它们连接起来以定义公式中的各个变量之间的依赖关系。
2. 使用信号建模模块:Simulink还提供了一系列的信号建模模块,如脉冲生成器、正弦波生成器、单位阶跃函数等。
用户可以利用这些模块生成各种类型的信号,并将其用作数学公式中的输入。
通过将信号生成器与数学运算模块连接起来,可以模拟出不同公式中的变量之间的时序关系。
3. 自定义函数模块:除了Simulink中已有的数学运算和信号建模模块,用户还可以自定义函数模块来实现更复杂的数学公式。
用户可以使用MATLAB语言编写自定义函数,并将其作为模块导入Simulink中。
通过自定义函数模块,用户可以更灵活地建模各种数学公式,并将其与Simulink中的其他模块进行组合使用。
在建模数学公式时,需要注意以下几点:1. 确定模型的输入和输出:在建模数学公式之前,需要明确模型中的输入和输出。
输入是模型中的已知条件,而输出是根据数学公式计算得出的结果。
通过明确输入和输出,可以更好地组织模型的结构,并验证数学公式的正确性。
2. 选择适当的模块参数:在使用Simulink中的模块时,需要根据具体的数学公式选择适当的模块参数。
例如,对于乘法运算,可以选择乘法模块,并设置乘法因子为公式中的系数。
通过调整模块参数,可以灵活地调整数学公式中的各个变量的权重。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Simulink 建模方法
在一些实际应用中,如果系统的结构过于复杂,不适合用前面介绍的方法建模。
在这种情况下,功能完善的Simulink 程序可以用来建立新的数学模型。
Simulink 是由Math Works 软件公司1990年为MATLAB 提供的新的控制系统模型图形输入仿真工具。
它具有两个显著的功能:Simul(仿真)与Link(连接),亦即可以利用鼠标在模型窗口上“画”出所需的控制系统模型。
然后利用SIMULINK 提供的功能来对系统进行仿真或线性化分析。
与MATLAB 中逐行输入命令相比,这样输入更容易,分析更直观。
下面简单介绍SIMULINK 建立系统模型的基本步骤:
(1) SIMULINK 的启动:在MATLAB 命令窗口的工具栏中单击按钮或者在命令提示符>>下键入simulink 命令,回车后即可启动Simulink 程序。
启动后软件自动打开Simullink 模型库窗口,如图 7所示。
这一模型库中含有许多子模型库,如Sources(输入源模块库)、Sinks(输出显示模块库)、Nonlinear(非线性环节)等。
若想建立一个控制系统结构框图,则应该选择File| New 菜单中的Model 选项,或选择工具栏上new Model 按钮,打开一个空白的模型编辑窗口如图 8所示。
(2) 画出系统的各个模块:打开相应的子模块库,选择所需要的元素,用鼠标左键点中后拖
到模型编辑窗口的合适位置。
(3) 给出各个模块参数:由于选中的各个模块只包含默认的模型参数,如默认的传递函数模
型为1/(s+1)的简单格式,必须通过修改得到实际的模块参数。
要修改模块的参数,可以用鼠标双击该模块图标,则会出现一个相应对话框,提示用户修改模块参数。
(4) 画出连接线:当所有的模块都画出来之后,可以再画出模块间所需要的连线,构成完整
的系统。
模块间连线的画法很简单,只需要用鼠标点按起始模块的输出端(三角符号),再拖动鼠标,到终止模块的输入端释放鼠标键,系统会自动地在两个模块间画出带箭头的连线。
若需要从连线中引出节点,可在鼠标点击起始节点时按住Ctrl 键,再将鼠标拖动到目的模块。
(5) 指定输入和输出端子:在Simulink 下允许有两类输入输出信号,第一类是仿真信号,
可从source(输入源模块库)图标中取出相应的输入信号端子,从Sink(输出显示模块库)图标中取出相应输出端子即可。
第二类是要提取系统线性模型,则需打开Connection(连接模块库)图标,从中选取相应的输入输出端子。
例9 典型二阶系统的结构图如图9所示。
用SIMULINK 对系统进行仿真分析。
图 7 simulink 模型库
图8 模型编辑窗口
按前面步骤,启动simulink 并打开一个空白的模型编辑窗口。
(1) 画出所需模块,并给出正确的参数:
● 在sources 子模块库中选中阶跃输入(step )图标,将其拖入编辑窗口,并用鼠标
左键双击该图标,打开参数设定的对话框,将参数step time(阶跃时刻)设为0。
● 在Math(数学)子模块库中选中加法器(sum )图标,拖到编辑窗口中,并双击该图
标将参数List of signs(符号列表)设为|+-(表示输入为正,反馈为负)。
● 在continuous(连续)子模块库中、选积分器(Integrator )和传递函数(Transfer
Fcn )图标拖到编辑窗口中,并将传递函数分子(Numerator )改为〔900〕,分母(Denominator )改为〔1,9〕。
● 在sinks(输出)子模块库中选择scope(示波器)和Out1(输出端口模块)图标并将之
拖到编辑窗口中。
(3)将画出的所有模块按图9用鼠标连接起来,构成一个原系统的框图描述如图10所示。
(4)选择仿真算法和仿真控制参数,启动仿真过程。
● 在编辑窗口中点击Simulation|Simulation parameters 菜单,会出现一个参数对话框,
在solver 模板中设置响应的仿真范围StartTime(开始时间)和StopTime(终止时间),仿真步长范围Maxinum step size(最大步长)和Mininum step size(最小步长)。
对于本例,StopTime 可设置为2。
最后点击Simulation|Start 菜单或点击相应的热键启动仿真。
双击示波器,在弹出的图形上会“实时地”显示出仿真结果。
输出结果如图11所示。
在命令窗口中键入whos 命令,会发现工作空间中增加了两个变量――tout 和yout ,这是因为Simulink 中的Out1 模块自动将结果写到了MATLAB 的工作空间中。
利用MATLAB 命令plot(tout,yout),可将结果绘制出来,如图12所示。
比较11和12
,可以发现这两种输
图9 典型二阶系统结构图
图10 二阶系统的simulink 实现
出结果是完全一致的。
图11仿真结果示波器显示图12 MATLAB命令得出的系统响应曲线。