GPS专业术语
gps测量原理与应用名词解释

gps测量原理与应用名词解释GPS(全球定位系统)是一种卫星导航系统,其测量原理和应用涉及许多专业术语。
以下是一些与GPS测量原理和应用相关的名词解释:1.卫星定位系统(Satellite Positioning System):通过卫星系统来确定地球上某点的位置的技术。
2.导航卫星(Navigation Satellite):用于提供导航信号的卫星,GPS系统中有一组专用于导航的卫星。
3.接收机(Receiver):接收并处理来自卫星的信号,计算用户的位置和速度的设备。
4.导航解(Navigation Solution):根据接收到的卫星信号计算出的用户的位置和速度。
5.伪距(Pseudorange):GPS接收机测量的卫星信号传播时间与接收机内部时钟时间之间的差值。
6.载波相位(Carrier Phase):GPS信号中携带导航信息的波的相位,用于更精确地计算位置。
7.多路径效应(Multipath Effect):由于信号反射或绕射引起的信号传播路径不唯一性,可能导致定位误差。
8.时钟偏移(Clock Offset):接收机内部时钟与GPS卫星时钟之间的差异。
9.PDOP(Position Dilution of Precision):表征卫星几何分布对定位精度的影响的参数。
10.RTK(Real-Time Kinematic):实时动态定位技术,使用载波相位信息实现更高精度的位置测量。
11.差分GPS(Differential GPS):使用参考站的观测数据来校正GPS测量误差,提高精度的技术。
12.卫星轨道(Satellite Orbit):卫星在地球周围运行的轨迹。
13.高度角(Elevation Angle):观察者所在位置与卫星之间的连线与地平线的夹角。
14.用户位置(User Position):GPS接收机计算出的用户所在的地理坐标。
15.导航精度(Navigation Accuracy):表征GPS系统提供的位置解的精度水平。
GPS行业术语
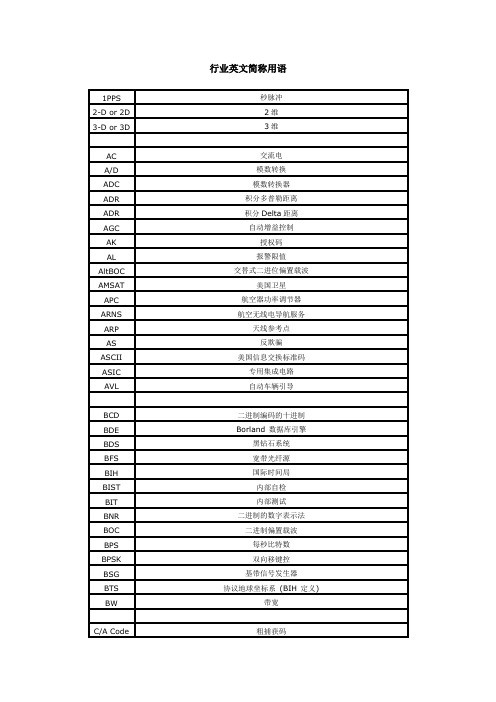
行业英文简称用语EMI 电磁抗干扰EP 工程实践ESA 欧洲航天局ESD 静电释放ESN 电子序列编码FAA 美国联邦航空局(FAA)FCC 联邦通信委员会FDA 频率功分器FDMA 频分多址FEC 前向纠错FEPROM 快可擦可编程只读存储器FIFO 先进先出FKP 区域改正数技术(德语)FLL 频率锁定环FMEA 故障模式影响分析FOC 全运行能力FOG 光纤陀螺FOM 品质因子FPGA 现场可编程门阵列FR 出厂复位FTP 文件传输协议FTS 频率和时间标准FW 固件GAGAN GPS辅助以GEO增强导航(印度)GaIn 伽利略工业体GCC 伽利略控制中心GDOP 几何精度因子GEO 对地同步卫星GIC GPS完好性通道GL NMEA 语句中用于识别GLONASS数据来源的ID号GLONASS 全球导航卫星系统(俄罗斯)GM 高斯-马尔可夫GMS 地面任务部分GMT 格林尼治标准时间GN NMEA 语句中用于识别GPS+GLONASS数据来源的ID号GND 地面GNSS 全球卫星导航系统G.P. 地平面GP NMEA 语句中用于识别GPS数据来源的ID号GPAI 通用模拟输入GPS 全球定位系统GRC 伽利略接收链GRCN 伽利略接收链非公共特许服务GSS 伽利略跟踪站GSTB 伽利略系统试验台GTR 伽利略测试接收机GTS 伽利略测试信号发生器GUI 图形用户接口GUS 地面上行站GUST WAAS GUS-类型1GUSTR WAAS GUS-类型1接收机HDOP 水平精度因子Hex 十六进制HFOM 水平质量因子HMAC 哈希信息认证码HP 高性能(标准OmniSTAR 服务) HTDOP 水平位置和时间精度因子Hz 赫兹I and Q 同相和正交(通道)I Channel 同相数据通道IBIT 初始化自检IC 集成电路ICAO 国际民航组织ICD 接口控制文档ICP 集成载波相位ID 标识IEC 国际电子技术委员会IEEE 电气和电子工程师协会IERS 国际地球自转服务IF 中频IGP 电离层格网点IGRF 国际参考地磁场IGS CB 国际GPS服务中心局IM 内调制IMLA 集成多径抑制天线IMO 国际海事组织IMU 惯性测量单元INH InhibitINS 惯性导航系统I/O 输入/输出IODE 数据龄期(星历)IOV 在轨验证IP 网际协议IRQ 中断请求ISG 中频信号发生器ISO 国际标准化组织ITRF 国际陆地参考框架JPL 喷气推进实验室(NASA)JTAG 联合测试行动小组KPA 速调管功率放大器Kb 千比特KB 千字节KMF 关键管理设备L1 频率:1575.42 MHz ,调制了C/A和P码的GPS载波频率;L2 频率:1227.60 MHz,GPS 载波频率(只调制了P码)L2C L2频段,L2频段上的民用码(1227.6 MHz)L5 第3代民用GPS频率,跟踪低信噪比信号(1176.45 MHz) LAAS 局域增强系统LCD 液晶显示器LED 发光二极管LF 换行LGF LAAS地面设备LHCP 左手圆极化LME 线路维修设备LNA 低噪放大器LO 本地振荡器LRU 外场可更换单元LSB 最低有效位LVTTL 低压晶体管-晶体管逻辑MAC 媒体访问控制子层协议(以太网)MAT 多径评估工具Mb 兆位MB 兆字节MEDLL? 多径估计延迟锁定环MEO 中距离地球轨道MET 多径消除技术MET 气象学MGRS 军事网格参考坐标系MHz 兆赫MIB 管理信息库MIL 军事MINOS Multiple Independent NOmadic StargazerMKI 标记输入MKMF 任务密钥管理设备MMCX 多媒体通信交换(朗讯)MMT 多径消减技术MOPS 最低操作性能标准MP 消息处理器MPC 已调制的精密时钟MPM 多径影响Ms 毫秒MSAS MTSAT 星基增强系统MSAT 移动卫星MSB 最高有效位MSL 平均海平面MSR 量测输出MTBF 平均故障间隔时间MTSAT 多功能传输卫星N/A 不适用NAS 国家空域系统(美国)NASA 国家航空航天局(美国)NTS 国家地形系统(加拿大)NAV RINEX 星历文件NAVSTAR 授时和测距导航卫星(GPS的同义词) N/C or NC 未连接NCC 网络控制中心NCO 数控振荡器ND 导航数据NH 诺埃曼-霍夫曼NMEA 国家海事电子协会N. mi. 海里NOC 网络运营中心Ns 纳秒NVM 非易失存储器OBS RINEX格式的观测文件OCXO 温控晶振OEM 原始设备制造商OP 运行参数OS 开放服务PAC 微脉冲相关技术PC 个人电脑PC 相位中心P-Code 精密码PBIT 上电机内检测PCB 印刷电路板PCMCIA 个人计算机存储卡国际协会PDC 功率和数据卡PDF 功率(幂)分布函数PDF 便携式文档文件PDOP 位置精度因子PE-90 1990地球参数(see PZ90) PIN 位置指示器PLL 相位锁定环PPM 百万分之PPP 点对点协议PPS 精密定位服务/秒脉冲PRN# 伪随机噪声码PRS 公共特许服务PSN 产品序列号PSR 伪距PV 有效位置PVT 位置、速度、时间PZ90 PZ-90坐标系(参考PE-90) Q Channel 正交无数据通道RAM 随机存取存储器RAS 远程访问服务RCC 援救协调中心RF 射频RFDC 射频直流电RFU 射频上行链路RHCP 右手圆极化RI 环路指示器RINEX 接收机无关的交换格式RLG 环型激光陀螺RoHS 有害物质使用的限制标准RM 原始测量量ROM 只读存储器RMA 退料授权RMS 均方根RSS 残余解状态RTC 实时钟RTCA 航空无线电技术委员会RTCM 海事无线电技术委员会RTCMV3 RTCM 版本3.0RTK 实时动态RTS 发送请求RXD 接收数据SA 智能天线SA 选择可用性SAE 汽车工程师协会SAR 搜索和救援SARSAT 搜索和救援辅助跟踪卫星SBAS 星基增强系统SC 安全计算机SCAT-I 专用类别ISD 标准偏差SEP 球误差概率SG 信号发生器SGS-90 前苏联1990地心坐标系SI 国际单位制SigGen WAAS GUS 类型-1 信号发生器SiS 空间信号SLIP 串行线路接口协议SNAS 卫星导航增强系统(中国) SNR 信噪比SOL 生命安全SPS 标准定位服务Sps 符号/秒SPAN? 同步定位姿态导航SQM 信号质量监测SRAM 静态随机存取存储器SS II SUPERSTAR IISU 前苏联(现俄罗斯)SV 空间运载体SVID 空间运载体标识SVN 卫星号SW 软件SWRU 软件可替代单元TCP 传输控制协议TCXO 温度补偿晶振TDOP 时间精度因子TES 时间估算器状态TIL 时间完好性限制TNM 电信网络管理TOA 历书时间TOE 星历时间TOW 星期时TRAIM 时间接收机自主完好性监测TTFF 首次定位时间TTL 晶体管-晶体管逻辑TTNL 窄相时间TVS 电压瞬态抑制二极管TXD 发送数据UART 通用异步收发器UDP 用户数据报协议UDRE 用户差分距离误差UHF 超高频USB 通用串行总线USGS 美国地质勘探局UTC 协调世界时UTC(SU) 协调时间时(前苏联,现俄罗斯)V AC 交流电压V DC 直流电压VARF 变频VBS 虚拟基站VCTCXO 压控温补晶振VDOP 垂直精度因子VFD 真空荧光显示屏VFOM 垂直性能因素VSWR 电压驻波比WAAS 广域增强系统WAAS G-II WAAS参考接收机: G-II WADGPS 广域差分GPSWEEE 电子电器设备废弃物WGS 世界大地坐标系WHQL 微软公司视窗硬件质量实验室(微软) WMP WAAS消息处理器WNA 历书周数WPT 航路点XP 附加性能(标准OmniSTAR 服务) XTE 偏航距ZUPT 零速修正GPS术语表美国信息交换标准码7比特位宽的串行码,用来描述数字、大小写字符、特殊字符和非打印字符,一般用于文档数据捕获锁定卫星C/A码和P码的过程。
GPS常识

GPS常识一、什么是GPSGPS即全球定位系统(Global Positioning System)是美国从上世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
经近10年我国测绘等部门的使用表明,GPS以全天候、高精度、自动化、高效益等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等多种学科,从而给测绘领域带来一场深刻的技术革命。
全球定位系统(Global Positioning System)是美国第二代卫星导航系统。
是在子午仪卫星导航系统的基础上发展起来的,它采纳了子午仪系统的成功经验。
和子午仪系统一样,全球定位系统由空间部分、地面监控部分和用户接收机三大部分组成。
按目前的方案,全球定位系统的空间部分使用24颗高度约2.02万千米的卫星组成卫星星座。
21+3颗卫星均为近圆形轨道,运行周期约为11小时58分,分布在六个轨道面上(每轨道面四颗),轨道倾角为55度。
卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位解算精度的几何图形(DOP)。
这就提供了在时间上连续的全球导航能力。
地面监控部分包括四个监控站、一个上行注入站和一个主控站。
监控站设有GPS用户接收机、原子钟、收集当地气象数据的传感器和进行数据初步处理的计算机。
监控站的主要任务是取得卫星观测数据并将这些数据传送至主控站。
主控站设在范登堡空军基地。
它对地面监控部实行全面控制。
主控站主要任务是收集各监控站对GPS卫星的全部观测数据,利用这些数据计算每颗GPS卫星的轨道和卫星钟改正值。
上行注入站也设在范登堡空军基地。
它的任务主要是在每颗卫星运行至上空时把这类导航数据及主控站的指令注入到卫星。
这种注入对每颗GPS卫星每天进行一次,并在卫星离开注入站作用范围之前进行最后的注入。
全球定位系统(GPS)术语及定义
全球定位系统(GPS)术语及定义全球定位系统(GPS)术语及定义【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:151范围本标准规定了全球定位系统(GPS)常用术语及定义。
本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。
2通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NA VSTAR)一种卫星导航定位系统。
由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。
包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。
2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。
包括军用和民用两种服务。
2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念。
GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。
并将由多国民间参与运行和控制的卫星导航系统。
GNSS也已经为国际海事组织(IMO)所接受。
欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。
GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。
2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。
2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。
GPS的常用术语

GPS的常用术语1、卫星轨迹这里有24颗GPS卫星沿六条轨道绕地球运行(每四颗一组),一般不会有超过12个卫星在地球的同一边,大多数GPS接收器可以追踪8~12颗卫星。
计算LAT/LONG(2维)坐标至少需要3颗卫星。
再加一颗就可以计算3维坐标。
对于一个给定的位置,GPS接收器知道在此时哪些卫星在附近,因为它不停地接收从卫星发来的更新信号。
2、并行通道一些消费类GPS设备有2~5条并行通道接收卫星信号。
因为最多可能有12颗卫星是可见的(平均值是8),这意味着GPS接收器必须按顺序访问每一颗卫星来获取每颗卫星的信息。
市面上的GPS接收器大多数是12并行通道型的,这允许它们连续追踪每一颗卫星的信息,12通道接收器的优点包括快速冷启动和初始化卫星的信息,而且在森林地区可以有更好的接收效果。
一般12通道接收器不需要外置天线,除非你是在封闭的空间中,如船舱、车厢中。
3、定位时间这是指你重启动你的GPS接收器时,它确定现在位置所需的时间。
对于12通道接收器,如果你在最后一次定位位置的附近,冷启动时的定位时间一般为3~5分钟,热启动时为15~30秒,而对于2通道接收器,冷启动时大多超过15分钟,热启动时为2~5分钟。
4、定位精度地信网地信网大多数GPS接收器的水平位置定位精度在5m~10m左右,但这只是在SA没有开启的情况下。
5、DGPS功能为了将SA和大气层折射带来的影响降为最低,有一种叫做DGPS发送机的设备。
它是一个固定的GPS接收器(在一个勘探现场100km~200km的半径内设置)接收卫星的信号,它确切地知道理论上卫星信号传送到的精确时间是多少,然后将它与实际传送时间相比较,然后计算出“差”,这十分接近于SA和大气层折射的影响,它将这个差值发送出去,其他GPS接收器就可以利用它得到一个更精确的位置读数(5m~10m或者更少的误差)。
许多GPS设备提供商在一些地区设置了DGPS发送机,供它的客户免费使用,只要客户所购买的GPS接收器有DGPS功能。
GPS常用术语及英文缩写
GPS 常用术语及英文缩写GPS作为野外定位的最佳工具,在户外运动中有广泛的应用,在国内也可以越来越经常地看见有人使用了。
GPS不象电视或收音机,打开就能用,它更象一架相机,你需要有一定的知识。
首先大家要弄清使用GPS时常碰到的一些术语:1.坐标(coordinate)有2维、3维两种坐标表示,当GPS能够收到4颗及以上卫星的信号时,它能计算出本地的3微坐标:经度、纬度、高度,若只能收到3颗卫星的信号,它只能计算出2维坐标:精度和纬度,这时它可能还会显示高度数据,但这数据是无效的。
大部分GPS不仅能以经/纬度(Lat/Long)的方式,显示坐标,而且还可以用UTM(Universal Transverse Mercator)等坐标系统显示坐标但我们一般还是使用LAT/LONG系统,这主要是由你所使用的地图的坐标系统决定的。
坐标的精度在Selective Availability(美国防部为减小GPS精确度而实施的一种措施)打开时,GPS的水平精度在50-100米之间,视接受到卫星信号的多少和强弱而定,若根据GPS的指示,说你已经到达,那么四周看看,应该在大约一个足球场大小的面积内发现你的目标的。
在SA关闭时,精度能达到15米左右。
高度的精确性由于系统结构的原因,更差些。
经纬度的显示方式一般都可以根据自己的爱好选择,一般有\"hddd.ddddd\",\"hddd*mm.mmm\"\",\"hddd*mm\"ss.s\"\"\"(其中的“*”代表“度”,以下同)地球子午线长是39940.67公里,纬度改变一度合110.94公里,一分合1.849公里,一秒合30.8米,赤道圈是40075.36公里,北京地区纬在北纬40度左右,纬度圈长为40075*sin(90-40),此地经度一度合276公里,一分合1.42公里一秒合23.69米,你可以选定某个显示方式,并把各位数字改变一对应地面移动多少米记住,这样能在经纬度和实际里程间建立个大概的对应。
GPS专业术语大全(相信一定有用)
专业术语大全添加时间:2009-10-29A-C:2DMode2D导航模式由至少3颗可见的卫星定出水平方向的二维坐标系。
3DMode3D导航模式由4颗以上的卫星定出所在位置的三维坐标。
AcquisitionTime第一次定位时间GPS接收机接收卫星信号以定位初始位置所花的时间,一般而言4颗卫星可决定3D位置,3颗卫星可决定2D位置。
ActiveLeg当前航段当前航线中正行驶的航段。
AlmanacData卫星星历由GPS卫星所发出的数据,包含每一卫星轨道位置、群集等信息。
星历可加快GPS接收机搜寻卫星的速度。
Anti-Spoofing反编码美国国防部为避免P-电码被接收应用,将P-电码调制部分错误的信息发送,而避开接收到此错误信息的动作,称为反编码。
AtomicClock原子钟使用铯元素或铷元素制作的精准时钟,估计每一百万年仅有一秒之误差。
Beacon信标台为提升GPS的定位精度所设立的非定向发射电台。
用来校正发射台所在地的GPS伪距。
附近的一般GPS接收机若能接收及应用此数据,能提高该接收机的定位精度。
CoarseAcquisitionCode(C/ACode)C/A电码GPS卫星发射的一种供大众使用的标准定位信号,它包含GPS接收机定位与时间方面的信息,精确度在100米左右。
ColdStart冷启动开机后GPS接收机需执行一连串如下载星历等的初始化动作,也称为初始化。
ControlSegment地面控制站这是为了追踪及控制卫星运转所设置的地面管制站,主要工作是负责修正与维护每个卫星保持正常运转的各项参数数据,以确保每个卫星都能发射正确的信息给使用者接收机。
Coordinate坐标一套以数字来描述您在地球上的位置的显示方法。
CoordinatedUniversalTime(UTC)格林威治时间1986年将格林威治时间设为世界标准时间。
它是以原子测量法为基础,而非地球自转。
格林威治时间仍然是最基本的子午线标准时区﹝零个经度﹞,其时间是由GPS卫星来保存的。
GPS术语

GPS术语 -- 词汇与概念解释( 按英文术语的第一个字母排序 )历书(Almanac)由G P S 卫星传送的资料,包括所有卫星的轨道信息、时钟修正以及大气时延参数。
这些资料用于支持快速卫星捕获。
历书中的轨道信息不如星历表精确,但有效时间较长(一至两年)。
模糊值 (Ambiguity)当一个接收站对经过的一颗卫星进行连续观测,为重建载波相位中包含的一个未知整周数。
纬度幅角(Argument of Latitude)真近点角与近地点幅角的和。
近地点幅角 (Argument of Perigee)在椭圆轨道的焦点上观察到的从升交点到轨道天体至焦点的最近距离处的角度或弧段,此角度是在轨道平面上沿轨道天体运动方向度量的。
升交点(Ascending Node)一个物体的轨道从南至北穿过参考平面(亦即赤道平面)的点。
方位角(Azimuth)由一个固定方向(如北方)与物体方向在水平方向的角距离。
带宽(Bandwidth)信号携带信息能力的量度,用该信号的谱宽度(频域)表示,单位为赫兹。
基线(Baseline)当两个观测点同步接收G P S 资料,并用差分方法进行数据处理时,这两个点之间的三维向量距离叫做基线。
差拍(Beat Frequency)两个频率的信号混频时产生的两个附加频率之中的任何一个。
这两个拍频等于原来两个频率的和或差。
偏置(Bias)见“整数偏置”。
二进制双相调制(Binary Biphase Modulation)在一个频率恒定的载波上的0度或180度的相位变化(分别代表二进制的0或1)。
GPS信号是双相调制的。
二进制脉冲编码调制(Binary Pulse Code Modulation)使用一串二进制数字(编码)的脉冲调制。
这种编码通常由“0”或“1”来表示,而“0”和“1”是具有明确含义(如波的相位变化或方向变化)的。
蓝皮书(Bluebook)由“N G S 蓝色参考书”衍生出的俗称。
书中包括N G S 要求大地测量数据所应有的信息和格式。
GPS专业术语缩写
HDOP - Horizontal Dilution of Precision 水平精度因子
HQ USAF - Headquarters US Air Force 美国空军总部
HIS - Horizontal Situation Indicator 水平位置指示
ITU - International Telcommunication Union 国际电信联合会
J/S - Jamming to Signal Ration 信号干扰比
JTIDS - Joint Tactical Information Distribution System 联合战术信息发布系统
IF - Intermediate Frequency 中频
IFF - Identification Friend or Foe 敌我识别
IFR - Infrared 红外的,红外线
IFR - Instrument Flight Rules 仪表飞行规则
I-Level - Intermediate Level 中间层
KHz - KiloHertz
千赫
L1 - GPS 信号频率之一(1575.42 MHz)
L2 - GPS 信号频率之一(1227.6 MHz)
LAAS - Local Area Augmentation System 局域增强系统
Lb - 磅
LCD - Liquid Crystal Display 液晶显示器
ATRCC - Air Route Traffic Control Center —— 空中航线交通控制中心 AMV - Auto Mag Var —— 自动磁偏角 AVLN - Automatic Vehicle Location and Navigation —— 车辆自主定位和导航系统 AWG- American Wire Gague —— 美国线规 BCD - Binary Code Decimal —— 二进制 BIPM - International Bureau of Weights and Measures —— 国际度量衡局 BIT - Built-In-Test —— 内置测试 BNC —— 同轴电缆接插件 BPSK - Bi Phase Shift Keying —— 双相移键控 BRG - Bearing —— 方位角(从当前位置到目的地的方向) C/A code - Coarse/Acquisition Code —— 粗捕获码 CAD - Computer Aided Design —— 计算机辅助设计 CADD - Computer Aided Design Device —— 计算机辅助设计设备 CDI - Course Deviation Indicator —— 航线偏航指示 CDMA - Code Division Multiplex Access —— 码分多址 CDU - Control Display Unit —— 控制显示单元 CEP - Circular Error Probable —— 循环可能误差 CMG - Course Mode Good —— 从起点到当前位置的方位 CMOS - Complementary Metal Oxide Semiconductor —— 补充金属氧化物半导体 COG - Course Over Ground —— 对地运动方向 CRPA - Controlled Radiation Pattern Antenna —— 受控辐射天线 CTS - Course To Steer —— 到目的地的最佳行驶方向
GPS术语要点
GPS术语 -- 词汇与概念解释( 按英文术语的第一个字母排序 )历书(Almanac)由G P S 卫星传送的资料,包括所有卫星的轨道信息、时钟修正以及大气时延参数。
这些资料用于支持快速卫星捕获。
历书中的轨道信息不如星历表精确,但有效时间较长(一至两年)。
模糊值 (Ambiguity)当一个接收站对经过的一颗卫星进行连续观测,为重建载波相位中包含的一个未知整周数。
纬度幅角(Argument of Latitude)真近点角与近地点幅角的和。
近地点幅角 (Argument of Perigee)在椭圆轨道的焦点上观察到的从升交点到轨道天体至焦点的最近距离处的角度或弧段,此角度是在轨道平面上沿轨道天体运动方向度量的。
升交点(Ascending Node)一个物体的轨道从南至北穿过参考平面(亦即赤道平面)的点。
方位角(Azimuth)由一个固定方向(如北方)与物体方向在水平方向的角距离。
带宽(Bandwidth)信号携带信息能力的量度,用该信号的谱宽度(频域)表示,单位为赫兹。
基线(Baseline)当两个观测点同步接收G P S 资料,并用差分方法进行数据处理时,这两个点之间的三维向量距离叫做基线。
差拍(Beat Frequency)两个频率的信号混频时产生的两个附加频率之中的任何一个。
这两个拍频等于原来两个频率的和或差。
偏置(Bias)见“整数偏置”。
二进制双相调制(Binary Biphase Modulation)在一个频率恒定的载波上的0度或180度的相位变化(分别代表二进制的0或1)。
GPS信号是双相调制的。
二进制脉冲编码调制(Binary Pulse Code Modulation)使用一串二进制数字(编码)的脉冲调制。
这种编码通常由“0”或“1”来表示,而“0”和“1”是具有明确含义(如波的相位变化或方向变化)的。
蓝皮书(Bluebook)由“N G S 蓝色参考书”衍生出的俗称。
书中包括N G S 要求大地测量数据所应有的信息和格式。
GPS常用术语、名词解释

GPS常用术语、名词解释Acquisition Time: 初始定位时间Active Leg: 激活航线Adapter: 转接器、拾音器、接合器Airborne: 空运的、空降的、机载的、通过无线电传播的Alkaline: 碱性的、碱性Almanac: 历书、概略星历Anti-Spoofing: 反电子欺骗Artwork: 工艺、工艺图、原图ssAtomic Clock: 原子钟Auto-controlling: 自动控制Avionics: 航空电子工学;电子设备Azimuth: 方位角、方位(从当前位置到目的地的方向)Beacon: 信标Bearing: 方向,方位(从当前位置到目的地的方向)Bug: 故障、缺陷、干扰、雷达位置测定器、窃听器Built-in: 内置的、嵌入的Cellular: 单元的、格网的、蜂窝的、网眼的Cinderella: 水晶鞋、灰姑娘这里特指JA V AD GPS接收机OEM板的选项,能自动在隔周的星期二GPS午夜时刻开始的24小时内让您的Javad接收机和OEM板变为双频双系统。
Coarse Acquisition Code(C/A): 粗捕获码Cold Start: 冷启动Connector: 接头、插头、转接器Constellation: 星座Control Segment: 控制部分Converter: 转换器、交换器、换能器、变频管、变频器、转换反应堆Coordinate: 坐标Co-pilot: 飞机副驾驶Cost-effective: 成本低,收效大的Course: 路线、路程、航线Course Deviation Indicator (CDI): 航线偏航指示Course Made Good (CMG): 从起点到当前位置的方位Course Over Ground (COG): 对地航向Course To Steer(CTS): 到目的地的最佳行驶方向Crosstrack Error (XTE/XTK): 偏航De-emphasis: 去矫、去加重Definition: 清晰度Diagonal: 对角线、斜的、对角线的Distinguishability: 分辨率Dropping resistors: 减压电阻器、将压电阻器Datum: 基准Desired Track (DTK): 期望航线(从起点到终点的路线)Differential GPS (DGPS): 差分GPSDilution of Precision (DOP): 精度衰减因子Elevation: 海拔、标高、高度、仰角、垂直切面、正观图Enroute: 在航线上、航线飞行Ephemeris: 星历Estimated Position Error (EPE): 估计位置误差Estimated Time Enroute (ETE): 估计在途时间(已当前速度计算) Estimated Time of Arrival (ETA): 估计到达时间Front-loading data cartridges: 前载数据卡Geodesy: 大地测量学Global Positioning System(GPS): 全球定位系统GLONASS: 俄国全球定位系统GOTO: 从当前位置到另一航路点的航线Greenwich Mean Time: 格林威治时间Grid: 格网坐标Heading: 航向Headphone: 戴在头上的收话器、双耳式耳机Headset amplifier: 头戴式放大器High-contrast: 高对比度Intercom: 内部通信联络系统、联络用对讲电话装置Intersection: 空域交界Interface Option (I/O): 界面接口选项Initialization: 初始化Invert Route: 航线反转Jack: 插座、插孔Keypad: 键盘、按键Kinematic: 动态的L1 Frequency: GPS信号频率之一(1575.42 MHz)L2 Frequency: GPS信号频率之一(1227.6 MHz)Latitude: 纬度、纬线Leg (route): 航段,航线的一段Liquid Crystal Display (LCD): 液晶显示器Local Area Augmentation System (LAAS): 局域增强系统Localizer: 定位器、定位发射机、定位信标Longitude: 经度、经线Long Range Radio Direction Finding System (LORAN): 罗兰导航系统Magnetic North: 磁北Magnetic V ariation: 磁偏角Map Display: 地图显示Meter: 米Mount: 安装、支架、装配、管脚、固定件Multiplexing Receiver: 多路复用接收机Multipath: 多路径Nautical Mile: 海里(1海里=1.852米).Navigation: 导航Navigation Message: 导航电文NA Vigation Satellite Timing and Ranging(NA VSTAR) Global Positioning System: GPS系统的全称National Marine Electronics Association (NMEA): (美国)国家航海电子协会NMEA 0183: GPS接收机和其他航海电子产品的导航数据输出格式North-Up Display: GPS屏幕显示真北向上Observatory: 观象台、天文台Offset: 偏移量Omnidirectional: 全向的、无定向的Orientation: 方位、方向、定位、倾向性、向东性Panel: 仪表盘、面板Panel-mount: 配电盘装配Parallel Channel Receiver: 并行通道接收机P-Code: P码Photocell: 光电管、光电池、光电元件Pinpoint: 极精确的、准确定位、准确测定、针尖Pixel: 象素Position: 位置Position Fix: 定位Position Format: 位置格式Power-on: 接通电源Pre-amplifier: 前置放大器Prime Meridian: 本初子午线Pseudo-Random Noise Code: 伪随机噪声码Pseudorange: 伪距Rack: 齿条、支架、座、导轨Resolution: 分辨率Route: 航线RS-232: 数据通信串口协议Radio Technical Commission for Maritime Services (RTCM): 航海无线电技术委员会,差分信号格式Selective Availability (SA): 选择可用性Sidetone: 侧音Source: 信号源、辐射体Space Segment: 空间部分Speed Over Ground (SOG): 对地航速Specifcation: 详述、说明书、规格、规范、特性Split Comm: 分瓣通信Squelch:静噪音、静噪电路、静噪抑制电路Statute Mile: 英里(1英里=1,609米)Straight Line Navigation: 直线导航Strobe: 闸门、起滤波作用、选通脉冲、读取脉冲TracBack - 按航迹返航Track-Up Display - 航向向上显示Track (TRK): 航向Transceiver:步话机、收发两用机Transponder: 雷达应答机、(卫星通讯的)转发器、脉冲转发机Transducer: 渔探用探头、传感器Triangulation: 三角测量True North: 真北Turn (TRN): 现时航向和目的地之间的夹角Two-way: 双向的、双路的、双通的Universal Time Coordinated (UTC): 世界协调时间Universal Transverse Mercator (UTM): 通用横轴墨卡托投影U.S.C.G.: 美国海岸警卫队User Interface: 用户自定义界面User Segment: 用户部分V elocity Made Good (VMG): 沿计划航线上的航速Viewing angles: 视角Waypoint: 航路点Wide Area Augmentation System (WAAS): 广域差分系统World Geodetic System - 1984(WGS-84): 1984年世界大地坐标系Windshield: 防风玻璃、防风罩Y-Code: 加密的P码Yoke: 架、座、轭、磁轭、磁头组、偏转线圈。
GPS专业术语解析

●A - C2D Mode 2D 導航模式由至少3顆可見的衛星訂出水平方向的二維座標系。
3D Mode 3D 導航模式由4顆以上之衛星訂出所做位置的三維座標。
Acquisition Time 第一次定位時間GPS接收器接收衛星訊號以決定初始位置所花的時間,一般而言4顆衛星可決定3D位置,3個衛星可決定2D位置。
Active Leg 目前航段目前的所紀錄的路徑。
Almanac Data 衛星星曆由GPS衛星所發出之資料,包含每一衛星軌道位置、群集等資訊。
星曆可增進GPS接收器搜尋衛星的速度。
Anti-Spoofing 反編碼由於美國國防部為避免P-電碼被接收應用,故將P-電碼調製部份錯誤之訊息廣播,而避開接收到此錯誤訊息的動作,稱為反編碼。
Atomic Clock 原子鐘使用銫元素或銣元素製作之精準時鐘,估計每一百萬年僅有一秒之誤差。
Azimuth 方位角地表某一點與地球球心之夾角。
也稱做相對方位。
Beacon 信標台為提升GPS的定位精度,所設立的非指向性廣播電台,用以廣播站台所在地之GPS虛擬距離校正資料,附近的一般GPS接收機,若能接收及應用此資料,即能提高該接收機的定位精度。
Bearing 相對方位從某一位置點到終點的羅盤指示方向,也可稱之為方位角。
Coarse Acquisition Code (C/A Code) C/A 電碼一個開放給民間使用的GPS衛星傳送標準定位信號,它包含有GPS接收機用來確定其定位與時間方面的訊息,精確度在100公尺左右。
Cold Start 冷開機開機後GPS接收器需執行一連串如下載星曆等的初始化動作,也稱為初始值。
Control Segment 地面控制站部份這是為了追蹤及控制衛星運轉,所設置的地面管制站,主要工作為負責修正與維護每個衛星能保持正常運轉的各項參數資料,以確保每個衛星都能提供正確的訊息給使用者接收機來接收。
Coordinate 座標顯示格式一套以數字來描述您在地球上所在位置的顯示方法。
GPS术语
GPS术语 -- 词汇与概念解释( 按英文术语的第一个字母排序 )历书(Almanac)由G P S 卫星传送的资料,包括所有卫星的轨道信息、时钟修正以及大气时延参数。
这些资料用于支持快速卫星捕获。
历书中的轨道信息不如星历表精确,但有效时间较长(一至两年)。
模糊值 (Ambiguity)当一个接收站对经过的一颗卫星进行连续观测,为重建载波相位中包含的一个未知整周数。
纬度幅角(Argument of Latitude)真近点角与近地点幅角的和。
近地点幅角 (Argument of Perigee)在椭圆轨道的焦点上观察到的从升交点到轨道天体至焦点的最近距离处的角度或弧段,此角度是在轨道平面上沿轨道天体运动方向度量的。
升交点(Ascending Node)一个物体的轨道从南至北穿过参考平面(亦即赤道平面)的点。
方位角(Azimuth)由一个固定方向(如北方)与物体方向在水平方向的角距离。
带宽(Bandwidth)信号携带信息能力的量度,用该信号的谱宽度(频域)表示,单位为赫兹。
基线(Baseline)当两个观测点同步接收G P S 资料,并用差分方法进行数据处理时,这两个点之间的三维向量距离叫做基线。
差拍(Beat Frequency)两个频率的信号混频时产生的两个附加频率之中的任何一个。
这两个拍频等于原来两个频率的和或差。
偏置(Bias)见“整数偏置”。
二进制双相调制(Binary Biphase Modulation)在一个频率恒定的载波上的0度或180度的相位变化(分别代表二进制的0或1)。
GPS信号是双相调制的。
二进制脉冲编码调制(Binary Pulse Code Modulation)使用一串二进制数字(编码)的脉冲调制。
这种编码通常由“0”或“1”来表示,而“0”和“1”是具有明确含义(如波的相位变化或方向变化)的。
蓝皮书(Bluebook)由“N G S 蓝色参考书”衍生出的俗称。
书中包括N G S 要求大地测量数据所应有的信息和格式。
GPS术语
1. 星历:由GPS 卫星播发的数据,包括所有卫星的轨道信息、星种改正和大气延迟参数。
星历用于快捕获SV。
轨道信息是降低了精度的星历数据的子集。
2. 天线高度:GPS 天线相位中心在观测点以上的高度。
从被测点到天线上已知点所测得的不正确的天线高,在软件中由人工或自动修改为正确的垂直距离。
3. 基线:一点相对于另一点的位置。
在GPS 测量中,是一台接收机相对于另一台接收机的位置。
当这两台接收机的数据被联合使用的时候,所得结果是包含这两个站之间三维向量的一条基线。
4. 校正点:校正点定义为现有坐标系统加改正值转换。
这使得一个特定区域(或点)上,可以最好地与数据相符。
由于坐标系统被应用于很大的区域区,则必须有改正值转换。
但不允许在地方坐标系内转化。
必须新的适合于现有控制点的任务,因此,特殊的改正值转换对这些地方变化进行改正,这些改正仅在有限区域内有效。
这解释了“校正点”这个术语。
Trimble Geomatics Office 软件能计算适用于地方控制点的特殊转换,并将这些定义保存在坐标系统的数据库里。
5. 闭合差:网中观测数据和已知数据之间的一致性。
6. CMR:压缩测量记录,动态作业时,由基准站接收机发播,实时动态测量使用并计算基准站到流动站的精确基线向量的卫星观测值信息。
7. 协方差:两个观测值或所获大量观测值间的误差的相关性测量。
也可参见方差—协方差距阵中的非对角线术语。
8. 协方差值:Trimble Geomatics Office 软件使用的是从网平差中得出的多对控制点间传播的方位、距离和高度的后验误差。
术语协方差表明计算中使用了平差控制点的方差—协方差距阵中的协方差术语。
9. 周跳:接收机锁定一颗卫星时的无线电信号的中断。
基线解算过程中,周跳需要重新估计整周模糊度。
10. 自由度:对网的冗余度衡量。
11. 星历:描述天体位置随时间变化函数的一组数据。
每颗GPS 卫星定期发送一个由控制段上载的广播星历,描述它在短期内的预测位置。
gps有关专业术语

模糊度(Ambiguity):未知量,是从卫星到接收机间测量的载波相位的整周期数。
基线(Baseline):两测量点的联线,在此两点上同时接收GPS 信号并收集其观测数据。
广播星历(Broadcast ephemeris ):由卫星发布的电文中解调获得的卫星轨道参数。
信噪比SNR(Signal-to-noise ratio):某一端点上信号功率与噪声功率之比。
跳周(Cycle skipping):在干扰作用下,环路从一个平衡点,跳过数周,在新的平衡点上稳定下来,使相位整数周期产生错误的现象。
载波(Carrier):作为载体的电波,其上由已知参考值的调制波进行频率、幅度或相位调制。
C/A码(C/A Code):GPS粗测/捕获码,为1023 bit 的双相调制伪随机二进制码,码率为1.023MHz,码重复周期为1ms。
差分测量(Difference measurement):利用交叉卫星、交叉接收机和交叉历元进行GPS测量。
单差(SD)测量:(交叉接收机)由两个接收机同时观测一颗卫星所接收的信号相位的瞬时差。
双差(DD)测量:(交叉接收机,交叉卫星)观测一颗卫星的单差相对于观测参考卫星的单差之差。
三差(TD)测量:(交叉接收机,交叉卫星,交叉历元)在一历元获得的双差与上一历元的双差之差。
差分定位(Difference positioning):同时跟踪相同的GPS信号,确定两个以上接收机之间的相对坐标的方法。
几何精度因子(Geometric dilution of precision):在动态定位中,描述卫星几何位置对误差的贡献的因子,表示式:。
式中,Q 为瞬时动态位置解的矩阵因子(取决于接收机和卫星的位置)。
在GPS中有如下几种标准术语:GDOP (三维坐标加钟差)四维几何因子PDOP(三维坐标)三维坐标几何因子HDOP(平面坐标)二维坐标几何因子VDOP(高程)高程几何因子TDOP(钟差)钟差因子HTDOP(高程和钟差)高程与钟差几何因子动态定位(Dynamic positioning ):确定运动着的接收机随时间变化的测点坐标的方法。
GPS术语

GPS专业术语·Accuracy(准确度):在测量工作中,系统误差影响着观测成果的准确度。
此处是指GPS接收机测量或估算的点位、时间和/或速度同它(它们)的真值相比较,带有系统偏差的符合度。
无线电导航系统的准确度一般呈现出系统误差统计量度,具有如下特征:▼可预见——无线电导航系统的定位解的准确度是相对于海图解而言的。
不管是定位解还是海图解,都必须基于同一大地定位基准。
▼可复现——同一用户基于同样的导航系统在上次测量过的地点测量,所得结果的准确度一致。
▼相关性——不同用户基于同样的导航系统在相同的时间作定位测量,其结果的准确度具有相关性。
·Analog(模拟):“模拟”是由不同波形表示信息特征的传输类型。
与此相反的另一类型为“数字”传输。
机械式时钟的指针是模拟装置,而时钟读数用的面板则是数字装置。
语音和声音都是模拟的。
现代电脑是数字的,用电话线相互通信时,信号必须用 Moderm (调制解调器)进行“模/数”转换。
·Application software(应用软件):在计算机操作系统支持下,为用户完成专门任务的程序。
譬如,机助发送系统就是应用软件,它是对每个发送的字进行处理的程序;Ashtech Solutions软件是在 Windows 操作系统支持下的GPS后处理(应用)软件。
·Automatic Vehicle Location (自动运载器跟踪,缩写为:AVL):用某种技术(如GPS、无线电)对运载器(车辆,飞行器等)进行跟踪定位探测的系统。
·Availability(可用性):导航系统在实际覆盖区内提供服务的时间百分比。
信号可用性是指不受外部信号源影响能正常传输导航信号的时间百分比。
“可用性”是指运行环境的物理特性与传输设备的技术性能的综合表现。
·Bandwidth(带宽):信号的频率范围。
·Block I, II, IIR, IIF satellites(GPS卫星代型 Block I, Block II, Block IIR, Block IIF):不同代型的GPS卫星:“Block I”是1978年发射的原型卫星;24颗“Block II”卫星,是1995年宣布完全建成运转的GPS星座;“Block IIR”是 Block II 的替补卫星;“Block IIF”是后续新一代卫星。
GPS常用术语、名词解释
GPS常用术语、名词解释Acquisition Time: 初始定位时间Active Leg: 激活航线Adapter: 转接器、拾音器、接合器Airborne: 空运的、空降的、机载的、通过无线电传播的Alkaline: 碱性的、碱性Almanac: 历书、概略星历Anti-Spoofing: 反电子欺骗Artwork: 工艺、工艺图、原图ssAtomic Clock: 原子钟Auto-controlling: 自动控制Avionics: 航空电子工学;电子设备Azimuth: 方位角、方位(从当前位置到目的地的方向)Beacon: 信标Bearing: 方向,方位(从当前位置到目的地的方向)Bug: 故障、缺陷、干扰、雷达位置测定器、窃听器Built-in: 内置的、嵌入的Cellular: 单元的、格网的、蜂窝的、网眼的Cinderella: 水晶鞋、灰姑娘这里特指JA V AD GPS接收机OEM板的选项,能自动在隔周的星期二GPS午夜时刻开始的24小时内让您的Javad接收机和OEM板变为双频双系统。
Coarse Acquisition Code(C/A): 粗捕获码Cold Start: 冷启动Connector: 接头、插头、转接器Constellation: 星座Control Segment: 控制部分Converter: 转换器、交换器、换能器、变频管、变频器、转换反应堆Coordinate: 坐标Co-pilot: 飞机副驾驶Cost-effective: 成本低,收效大的Course: 路线、路程、航线Course Deviation Indicator (CDI): 航线偏航指示Course Made Good (CMG): 从起点到当前位置的方位Course Over Ground (COG): 对地航向Course To Steer(CTS): 到目的地的最佳行驶方向Crosstrack Error (XTE/XTK): 偏航De-emphasis: 去矫、去加重Definition: 清晰度Diagonal: 对角线、斜的、对角线的Distinguishability: 分辨率Dropping resistors: 减压电阻器、将压电阻器Datum: 基准Desired Track (DTK): 期望航线(从起点到终点的路线)Differential GPS (DGPS): 差分GPSDilution of Precision (DOP): 精度衰减因子Elevation: 海拔、标高、高度、仰角、垂直切面、正观图Enroute: 在航线上、航线飞行Ephemeris: 星历Estimated Position Error (EPE): 估计位置误差Estimated Time Enroute (ETE): 估计在途时间(已当前速度计算) Estimated Time of Arrival (ETA): 估计到达时间Front-loading data cartridges: 前载数据卡Geodesy: 大地测量学Global Positioning System(GPS): 全球定位系统GLONASS: 俄国全球定位系统GOTO: 从当前位置到另一航路点的航线Greenwich Mean Time: 格林威治时间Grid: 格网坐标Heading: 航向Headphone: 戴在头上的收话器、双耳式耳机Headset amplifier: 头戴式放大器High-contrast: 高对比度Intercom: 内部通信联络系统、联络用对讲电话装置Intersection: 空域交界Interface Option (I/O): 界面接口选项Initialization: 初始化Invert Route: 航线反转Jack: 插座、插孔Keypad: 键盘、按键Kinematic: 动态的L1 Frequency: GPS信号频率之一(1575.42 MHz)L2 Frequency: GPS信号频率之一(1227.6 MHz)Latitude: 纬度、纬线Leg (route): 航段,航线的一段Liquid Crystal Display (LCD): 液晶显示器Local Area Augmentation System (LAAS): 局域增强系统Localizer: 定位器、定位发射机、定位信标Longitude: 经度、经线Long Range Radio Direction Finding System (LORAN): 罗兰导航系统Magnetic North: 磁北Magnetic V ariation: 磁偏角Map Display: 地图显示Meter: 米Mount: 安装、支架、装配、管脚、固定件Multiplexing Receiver: 多路复用接收机Multipath: 多路径Nautical Mile: 海里(1海里=1.852米).Navigation: 导航Navigation Message: 导航电文NA Vigation Satellite Timing and Ranging(NA VSTAR) Global Positioning System: GPS系统的全称National Marine Electronics Association (NMEA): (美国)国家航海电子协会NMEA 0183: GPS接收机和其他航海电子产品的导航数据输出格式North-Up Display: GPS屏幕显示真北向上Observatory: 观象台、天文台Offset: 偏移量Omnidirectional: 全向的、无定向的Orientation: 方位、方向、定位、倾向性、向东性Panel: 仪表盘、面板Panel-mount: 配电盘装配Parallel Channel Receiver: 并行通道接收机P-Code: P码Photocell: 光电管、光电池、光电元件Pinpoint: 极精确的、准确定位、准确测定、针尖Pixel: 象素Position: 位置Position Fix: 定位Position Format: 位置格式Power-on: 接通电源Pre-amplifier: 前置放大器Prime Meridian: 本初子午线Pseudo-Random Noise Code: 伪随机噪声码Pseudorange: 伪距Rack: 齿条、支架、座、导轨Resolution: 分辨率Route: 航线RS-232: 数据通信串口协议Radio Technical Commission for Maritime Services (RTCM): 航海无线电技术委员会,差分信号格式Selective Availability (SA): 选择可用性Sidetone: 侧音Source: 信号源、辐射体Space Segment: 空间部分Speed Over Ground (SOG): 对地航速Specifcation: 详述、说明书、规格、规范、特性Split Comm: 分瓣通信Squelch:静噪音、静噪电路、静噪抑制电路Statute Mile: 英里(1英里=1,609米)Straight Line Navigation: 直线导航Strobe: 闸门、起滤波作用、选通脉冲、读取脉冲TracBack - 按航迹返航Track-Up Display - 航向向上显示Track (TRK): 航向Transceiver:步话机、收发两用机Transponder: 雷达应答机、(卫星通讯的)转发器、脉冲转发机Transducer: 渔探用探头、传感器Triangulation: 三角测量True North: 真北Turn (TRN): 现时航向和目的地之间的夹角Two-way: 双向的、双路的、双通的Universal Time Coordinated (UTC): 世界协调时间Universal Transverse Mercator (UTM): 通用横轴墨卡托投影U.S.C.G.: 美国海岸警卫队User Interface: 用户自定义界面User Segment: 用户部分V elocity Made Good (VMG): 沿计划航线上的航速Viewing angles: 视角Waypoint: 航路点Wide Area Augmentation System (WAAS): 广域差分系统World Geodetic System - 1984(WGS-84): 1984年世界大地坐标系Windshield: 防风玻璃、防风罩Y-Code: 加密的P码Yoke: 架、座、轭、磁轭、磁头组、偏转线圈。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.9惯性导航系统inertial navigation system(INS)利用惯性仪表(陀螺仪和加速度计)、参考方向和初始位置来测量载体运动方向、速度【中华人民共和国国家标准GB/T 19391-2003 】1 范围本标准规定了全球定位系统(GPS)常用术语及定义本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面2 通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NAVSTAR)一种卫星导航定位系统由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息包括军用和民用两种服务2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务并将由多国民间参与运行和控制的卫星导航系统GNSS也已经为国际海事组织(IMO)所接受欧洲的GNSS计划分为两个阶段即GNSS-1和GNSS-2GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能兼有简短报文通信能力2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息注:已于l997年12月31日关闭2.7国际GPS动力学服务international GPS geodynamics service(IGS)国际大地测量协会于1994年创立的国际GPS研究服务机构它负责向世界各国的GPS用户提供精密的星历、地球旋转参数、全球GPS跟踪网数据等多种信息2.8GPS空间段GPS space segment指GPS的空间星座它按设计由分布在6个轨道平面上的24颗导航卫星组成,卫星向地球方向广播含有测距码和数据电文的导航信号2.9GPS地面控制段GPS ground control segment指GPS的地面监测和控制系统,它包括主控站、卫星监测站和上行信息注入站(又称地面天线)以及把它们联系起来的数据通信网络2.10GPS用户段GPS user segment指各种GPS用户终端其主要功能是接收卫星信号,提供用户听需要的位置、速度和时间等信息2.11Block ⅠⅡ,ⅡA,ⅡRⅡR-M,ⅡFⅢ卫星Block Ⅰ,Ⅱ,ⅡA,ⅡR,ⅡR-M,ⅡF,Ⅲsatellites指GPS的各代卫星的名称Block Ⅰ是原型卫星;BlockⅡ和ⅡA是目前的基本工作卫星;Block ⅡR和ⅡR-M是正在发射的替补卫星;Block ⅡF是后继卫星 Block Ⅲ是在规划中的2010年以后发射的卫星2.12伪卫星pseudolite设立在地面上的GPS信号发射站它发播与真实的GPS卫星相似的信号可在近距离内起到和GP5卫星类同的作用2.13星历ephemeris描述天体的空间位置的轨道参数2.14GPS卫星星历GPS satellite ephemerisGPS卫星星历一共包含16种数据,它们分别是历元、在历元上的6个卫星轨道参数以及用于在历元之后修正轨道参数的9个系数2.15广播星历broadcast ephemeris卫星播发的电文中所包含的本颗卫星的轨道参数或卫星的空间坐标2.16精密星历precise ephemeris由若干个不属于GPS系统的卫星跟踪站获得的测量值,经事后处理计算出的卫星轨道参数供事后精密定位使用2.17历书almanacGPS卫星电文中包含的所有在轨卫星的粗略轨道参数2.18载频L1、L2、L5 carrier L1,L2L5L1、L2为GPS卫星所发射信号的载频,L1为1575.42MHz,L2为1227.60MHzL5为GPS卫星将增发的民用信号的载频,预定为117**5MHz2.19历元epoch指一个时期和一个事件的起始时刻或者表示某个测量系统的auot cad参考日期注:在GPS术语中两种概念都使用2.20伪随机噪声码pseudo random noise(PRN)code一种具有与白噪声类似的自相关特性确定的码序列GPS信号中采用了伪随机噪声编码技术,以产生码分多址(CDMA),直接宇列扩频和伪距测量功能2.21粗/捕获码coarse/acquisition codeC/A码C/A code用于调制GPS卫星L1载频信号的民用伪随机码2.22精码precise codeP码P code曾经用于调制GPS卫星L1和L2载频信号的伪随机码2.23P(Y)码P(Y)codeY码Y codeGPS卫星用于调制L1和L2载频信号的军用伪随机码,由P码与加密码W模2相加而成由于Y码仍然保持着P码的码速率,因此也称作P(Y)码2.24精度因子dilution of precision(DOP)描述卫星的几何位置对误差贡献的因子GPS的误差为测距误差与精度因子之乘积2.25几何精度因子geometrical dilution of precision(GDOP)表征卫星几何位置布局对GPS三维位置误差和时间误差综合影响的精度因子2.26位置精度因子positional dilution of precision(PDOP)表征卫星几何位置布局对GPS三维位置精度影响的精度因子2.27高程精度因子vertical dilution of precision(VDOP)表征卫星几何位置布局对GPS高程定位精度影响的精度因子2.28平面位置精度因子horizontal dilution of precision(HDOP)表征卫星几何位置布局对GPS平面位置精度影响的精度因子2.29时间精度因子time dilution of precision(TDOP)表征卫星几何位置布局对GPS时间精度影响的精度因子2.30捕获acquisition用户设备对接收到的GPS卫星信号完成码识别、码同步和载波相位同步的处理过程2.31重捕re-acquisitionGPS接收机因信号遮挡等原因短时间失锁后重新捕获信号的过程一般很快便能完成2.32跟踪tracking对捕获到的GPS卫星信号继续保持码同步和载波相位同步的过程2.33码相位跟踪code phase trackingGPS接收机通过对GPS卫星信号的C/A码或P(Y)码的码相位进行跟踪,以获得GPS伪距测量值的过程2.34载波相位跟踪carrier phase trackingGPS接收机通过对GPS卫星信号的载波相位的跟踪,以获得载波相位测量值的过程2.35载波相位平滑carrier phase smoothing在GPS接收机中利用积分载波相位测量值,以减小由码相位跟踪噪声造成的误差的方法2.36周跳cycle slips在GPS接收机进行载波相位跟踪时,因某种原因产生的整数载波周期跳变2.37伪距pseudorange由GPS接收机测出的卫星信号传播时间而计算出的卫星与接收天线相位中心间的距离2.38距离变化率range rate用测量GPS卫星载波的多普勒频移求得的伪距变化的速率2.39选择可用性selective availability(SA)是美国人为地将误差引入卫星时钟和星历数据中,以降低GPS标准定位服务(SPS)精度的人为措施注:该措施从1990年3月开始实施,2001年5月1日停止使用2.40完好性integrity当无线电导航系统不应当用于导航时向用户及时发出警告(信息)的能力GPS 系统有一定的完好性措施,但对一些应用系统目前的完好性还不够2.41反欺骗anti-spoofing(A-S)GPS卫星信号中用加密码W与P码相叠加使之变为Y码的措施,用于精密定位眼务(PPS)只有具有解密能力的接收机才能利用精密定位服务2.42标准定位服务standard positioning service(SPS)由GPS的C/A码所提供的公开的民用服务2.43精密定位服务precise positioning service(PPS)由GPS的P(y)码所提供的保密服务,仅供美国及其盟国军用或经特许的其他用户使用2.44接收机自主完好性监测receiver autonomous integrity monitoring(RAIM)接收机利用冗余GPS卫星的伪距测量信息以判定GPS系统完好性的方法它能判断可见卫星中是否有卫星出现故障或哪一颗卫星发生了故障并将其排除在导航解之外2.45飞机自主完好性监视airplane autonomous integrity monitoring(AAIM)利用飞企业资产负债表表格下载机上各种导航设备的冗余信息辅助GPS接收机,以提高GPS完好性的一种技术2.46GPS完好性通道GPS integrity channel(GIC)以由多个地面GPS卫星监测台组成的网为基础,提高GPS星座完好性的技术2.47故障检测和排除fault detection exclusion(FDE)在RAIM中,利用冗余GPS卫星的伪距测量信息,具体地判定某一颗卫星不可用而将其从求解组合中排除不用的方法注:当可见卫星为6颗以上时才能作故障检测和排除2.48GPS监测站GPS monitor station在GPS地面控制段中用以对GPS星座的所有卫星进行跟踪测量的设施全球一共设有5个所有监测站收集到的数据传送到主控站,在那里解算出卫星星历和时间的修正参数,然后上行加载到卫星上2.49主机板original equipment manufacture(OEM);engine board是GPS接收机的核心部件包括RF、数字通道、处理器和定位解算软件在OEM基础上,根据不同用户的需求,加上不同的人机界面、天线和外壳结构,可以做成适合不同需要的GPS用户没备2.50C/A码GPS接收机C/A code GPS receiver利用GPS的C/A码进行导航定位的接收机2.51P(Y)码GPS接收机P(Y)code GPS receiver利用GPS的P(Y)码进行导航定位的接收机2.52单频GPS接收机single frequency GPS receiver只能接收GPSL1载频信号而进行导航定位的接收机2.53双频GPS接收机dual frequency GPS receiver能够接收GPS L1、L2信号而进行导航定位的接收机2.54无码GPS接收机codeless GPS receiver在不知道P(Y)码序列的条件下,采用某种信号处理技术获得GPSL1和L2双频信号的测量值,从而具有电离层延迟校正能力的民用双频GPS接收机2.55软件无线电GPS接收机software radio GPS receiver将经天线接收和直接放大后的GPS卫星信号送入高速模/数变换器,其后的全部处理过程由通用数字信号处理器完成的GPS接收机2.56导航型GPS接收机navigational GPS receiver能在动态条件下提供实时定位及其他数据并具有导航功能的GPS接收机2.57测地型GPS接收机geodetic GPS receiver能够提供卫星信号原始观测值用于高精度测量的接收机2.58GPS/GLONASS兼用接收机GPS/GLONASS dual-used receiver能够同时接收GPS卫星和GLONASS卫星信号进行导航定位的接收机2.59测姿型GPS接收机attitude-determination GPS receiver用以测量载体方向、横滚和俯仰等参数的GPS接收机通常由多个GPS接收天线、OEM和相应的处理器组成2.60测向型GPS接收机GPS azimuth-determination receiver用以测量载体方向等参数的GPS接收机,通常由双天线、OEM和相应的处理器组成2.61授时型GPS接收机time transfer GPS receiver专用于精确时间(GPS时或UTC时间)发布的GPS接收机有时还同时输出高稳定度的频率授时精度可以达到或超过40ns2.62定时校频GPS接收机GPS time/frequency receiver同时产生GPS标准秒信号和基准频率的GPS接收机用于对用户的时钟和频率源进行定时和校准2.63单通道GPS接收机single channel GPS receiver采用单个硬件通道,按照一定的时序实现对多颗卫星信号的跟踪并完成定位功能的老式GPS接收机2.64多通道GPS接收机multichannel GPS receiver一个包含多个并行通道的GPS接收机每个通道都能独立连续跟踪一颗或一颗以上卫星2.65GPS数字接收机GPS digital receiver从中频开始进行数字量化处理的GPS接收机2.66GPS模拟接收机GPS analog receiver载波环和码环采用模拟电路实现的老式GPS接收机2.67差分GPS接收机differential GPS receiver能够接收由差分基准站的数据链路发射的差分修正数据,而进行差分导航定位的GPS用户设备,一般包括数据链信号接收机和能利用差修正信息的GPS接收机2.68GPS接收机应用模块GPS receiver application module(GRAM)是一种标准化的美国军用GPS用户设备模块,用于确保军用GPS用户设备的安全性、共用性和互换性2.69GPS天线设备档案表格相位中心GPS antenna phase center指GPS天线的电气中心其理论设计应与天线的几何中心一致2.70GPS接收机噪声GPS receiver noiseGPS接收机噪声是由接收机内部热噪声、通道间的偏差和量比误差等引起的测距和测相误差的综合表征2.71GPS微带天线GPS microstrip antenna一种GPS接收机天线类型由粘接在基板上的特殊设计和精确量裁的金属箔构成2.72冷启动cold startGPS接收机在不知道星历、历书、时间和位置的情况下开机,需要较长时间才能正常定位2.73温启动warm startGPS接收机在不知道星历,但存有历书、时间和位置的情况下开机,达到正常定位的时间比冷启动短2.74热启动hot startGPS接收机在存有星历、历书、时间和位置的情况下开机达到正常定位的时间比温启动短2.75均方根误差root mean square(RMS)表明GPS观测值数据质量的参数,其值越小数据质量越好2.76用户距离误差user range error(URE)用户测量所得的伪距与至卫星真实距离的误差,用均方根值来规定2.77用户等效距离误差user equivalent range error(UERE)根据各种误差源听求得的对用户至卫星距离测量误差的估值2.78GPS导航电文GPS navigation message是由GPS卫星播发给用户的描述卫星运行状态与参数的电文,包括卫星健康状况、星历、历书,卫星时钟的修正值、电离层时延模型参数等内容,以50bps 速率播发2.79转换字hand over word(HOW)GPS导航电文中的转换字载有时间信息,用于在P(Y)码接收机中辅助从C/A 码跟踪状态转换到P(Y)码跟踪状态2.80Z-计数Z-countGPS卫星时钟时间在GPS导航电文中位于每个子帧的第二个转换字(HOW)之前,用29位二进制数表示,单位为1.5s,一个Z-计数为6s2.81差分GPS differential GPS(DGPS)一种提高GPS定位和定时精度的技术在已知点上设置GPS基准接收机,根据由此获得的GPS测量误差产生误差修正量,实时或事后提供给差分GPS用户设备,使用户设备接收并利用修正量以提高其定位精度2.82差分基准站differential reference station差分站differential station设在已知坐标点上的GPS基准接收机连续观测视界内的卫星,产生差分修正量再利用数据链发射台向差分GPS用户设备发送差分修正信息这种固定站称为差分基准站2.83局域差分GPS local area DGPS(LADGPS)用于提高局部区域的GPS定位精度的实时差分GPS系统2.84局域增强系统local area augmentation system(LAAS)利用VHF数据链的局域差分GPS系统,它同时提高GPS定位精度和完好性为飞机精密进近服务2.85位置差分GPS position differential GPS以差分基准接收机提供的位置误差作为修正量的局域差分GPS,它要求基准站GPS接收机和用户接收机使用相同的卫星组进行定位解算2.86伪距差分GPS pseudorange differential GPS以差分基准接收机产生的视界内各颗GPS卫星的伪距误差及其变化率作为修正量的局域差分GPS它不要求基准接收机和用户接收机使用相同的星组2.87载波相位差分GPS carrier phase differential GPS利用基站GPS接收机和用户GPS接收机对多颗卫星信号的载波相位和码伪距的观测量,进行双差分和其他处理,以使用户获得厘米甚至毫米级定位精度的一种相对定位技术2.88实时动态测量系统real time kinematic(RIK)survey system利用数据链将基站GPS接收机的载波相位和码伪距观测量传送给用户,用户接收机采用双差分以及其他处理快速解算出载波整周多值性,以实现动态高精度的实时定位系统2.89EUROFIX系统EUROFIX system以罗兰C作为数据链的局域差分GPS系统2.90连续工作基准站continuously operating reference stations(CORS)互联网差分iso9001质量手册范本GPS internet differential GPS由美国大地测绘局(NGS)、国家海洋和大气局(NOAA)联合建立的GPS增强系统它通过互联网和电话数据包服务,收集来自分布在全国的几百个基准站的码距离和载波相位数据,经中心站处理后再通过互联网,提供给用户,支持GPS 非导航用户和后处理应用,提高GPS定位精度2.91中波数据链差分differential using medium frequency data link利用中波数据链的局域差分GPS2.92海用差分GPS maritime DGPS是一种中波数据链差分GPS用已有的或增强的海用无线电信标台发射信号的副载波作数据链,同时提高水上用户的定位精度和完好性2.93调频数据链差分differential using FM data link利用调频广播副载波作数据链的局域差分GPS2.94全国差分GPS nationwide differential GPS(NDGPS)利用与海用差分GPS同样的体系结构由许多基准站组成,并连同已有的海用差分站,组成覆盖全美国的系统,用于提高GPS定位精度与完好性,为陆上和水上用户服务2.95广域差分GPS wide area DGPS(WADGPS)利用大范围地面分布的GPS基准站收集GPS卫星的数据把伪距误差分解成分量,在整个区域对每一分量进行估计形成修正量,将这些修正量实时传送给GPS用户设备一般由主控站、多个基准站、差分信号播发站、数据通信网络和用户设备组成可用相对较少的基准站提高较广区域的GPS定位精度2.96广域增强系统wide area augmentation system(WAAS)由美国研制的,利用广域差分技术、卫星完好性监测技术和GPS导航信号转发技术,用地球静止卫星作为数据链以GPS L1载频播发这些增强信息用户使用相宜的接收机系统WASS提高GPS的完好性、精度和可用性主要为美国民用航空服务目标是使GPS在整个美国达到飞机I类精密进近的水平2.97欧洲静地星导航重叠服务European geostationary navigation overlay service (EGNOS)欧洲发展的与WAAS相类似的系统和WAAS的主要差别是:它将同时增强GPS和GLONASS系统,覆盖整个欧洲及周边地区2.98多功能交通卫星星基增强系统MTSAT satellite based augmentation system (MSAS)由日本发展的,与WAAS十分类似的系统利用多功能交通卫星(MSAST)播发数据,覆盖日本及其周边洋区2.99星基增强系统satellite based augmentation system(SBAS)利用地球静止轨道卫星播发差分修正及其他信息,以提高卫星导航用户的精度及其性能的广域增强系统2.100陆基增强系统ground based augmentation system(GBAS)利用地面发射台播发差分修正及其他信息以提高卫星导航刚户精度机其他性能的局域增强系统2.101机上增强系统aircraft based augmentation system(ABAS)航空器上利用其他系统获得信息以增强卫星导航用户终端的(定位)性能,或利用它们之间的组合方式共同形成性能增强的导航信息2.102联合精密进近着陆系统joint precision approach and landing system(JPALS)是美国军方正在研制的利用军用信号的差分GPS着陆、着舰系统2.103舰载相对GPS shipboard relative GPS是联合精密进近着陆系统作舰载飞机着舰时的特殊应用方式,为飞机提供相对于军舰的位置2.104GPS现代化GPS modernization为提高GPS系统性能而正在抉行的计划,包括在GPS卫星发射的L2载频上增加调制民用码,增加发射L5载频的民用信号,把军用与民用信号频谱分隔开,在L1、L2上增发军用的M码、增大卫星发射功率和改善地面控制段等措施2.105广域GPS强化wide area GPS enhancements(WAGE)利用GPS卫星同时发播整个星座的伪距修正信息,以提高GPS系统精度的一种方法2.106GPS精度改善创新GPS accuracy improvement initiative(AⅡ)是美国为提高GPS系统精度而正在进行的一项计划,该计划包6s管理检查表括把美国影像和地图绘制局(NIMA)的GPS卫星监测站并入现有监视网络,重新设计主控站GPS中的卡尔曼滤波器以及改善对GPS卫星上行注入方式与能力等三项改善地面控制段的措施2.1073P计划3P program是美国对GPS导航战计划的别称,包括:● 保护(美国及其盟国)在战场上的GPS军事服务;● 防止敌对方对GPS服务的利用;● 维持在战场区域以外的GPS民用服务注:由于保护(protection)、防止(prevention)、维持(preserve)的英文字头均为P,故称为3P2.108导航战navigation warfare(NAVWAR)美国于1996年开始执行的一项军事计划,其目的是提高GPS军用接收机的抗干扰能力,使美军具有在区域的基础上停止GPS民用接收机工作的能力,甚至包括停止其他卫星系统工作的能力2.109GPS接口控制文件GPSICD-200GPS接口控制文件是—个美国政府文件,包括用户与GPS卫星间接口的完整的技术说明2.110海用差分GPS电文格式RTCM SC-104 DGPS message format美国海用无线电技术委员会(RTCM)104专门委员会(SC-104)制定的GPS 差分数据电文格式,在世界范围得到推广应用2.111NMEA-0183美国国家海洋电子协会制定的海用电子设备接口标准及数据格式,许多GPS接收机采用这种标准作为一种数据输入输出格式3 测量特性术语3.11984世界大地坐标系world geodetic system 84WG84坐标系WG84 coordinate system由美国国防部在与WGS72相应的精密星历系统NSWC-9Z-2基础上采用1980大地参考系和BIH1984.0系统定向所建立的一种地心参考系3.2模糊度(多值性)ambiguity当一个接收机对卫星进行连续观测,为重建载波相位的伪距观测值,其中所包含的侍解未知整周数称为整周模糊度值3.3天线高antenna height观测时接收机天线相位中心至测站中心标志面的高度3.4观测时段observation session观测站上开始接收卫星信号到停止接收,连续观测的时间间隔称为观测时段简称时段3.5同步观测simulateous observation两台或两台以上接收机同时对同一卫星进行的观测3.6独立观测环independent observation loop由非同步观测获得的基线向量构成的闭合环3.7单差解single difference solution对两个不同观测站GPS接收机同步观测同一卫星载波相位观测值进行求差的数据处理方法可以消除或削弱GPS卫星钟差、轨道误差、电离层时延和对流层时延3.8双差解double difference solution对两个不同观测站GPS接收机同步观测两颗卫星听得的单差进行求差的数据处理方法,可以消除GPS接收机钟差3.9三差解triple difference solution对两个不同观测站GPS接收机同步观测两颗卫星所得的双差在不同历元进行求差的数据处理方法,可以消除整周模糊度3.10数据剔除率percentage of data rejection删除的观测值个数与应获取的观测值个数的比值3.11扼流圈天线choke ring antenna一种根据L1、L2频率值精心设计的带有多路径抑制槽、可以同时消除L1、L2多路径效应的测量型GPS接收机专用天线,一般用于高精度GPS测量3.12RATIO值RATIO反映GPS整周模糊度解算结果可靠性的参数,其结果取决于多种因素用次最小RMS与最小RMS的比值来表示3.13组合观测值combinative observation由L1、L2载波相位观测值通过一定的数学运算得到的观测值3.14宽巷观测值wide lane observation由L1-L2得到的组合观测值,其波长为86.19cm,有利于求解整周模糊度3.15窄巷观测值narrow lane observation由L1+L2得到的组合观测值,具有比L1、L2都小的观测噪声3.16RINEX格式receiver independent exchange format是GPS原始观测数据的一种通用的存储格式,是ASCII码文本文件,一般由观测数据文件、导航数据文件、气象数井下作业工初级工据文件三种,有特定的文件命名方式其最新版已包括GLONASS数据3.17参考站reference station在一定的观测时间内一台或几台接收机分别固定在一个或几个测站上一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就称参考站3.18流动站roxing station在参考站的一定范围内流动作业的接收机所设立的测站3.19GPS静态定位测量static GPS positioning通过在多个测站上进行若干时段同步观测,确定测站之间相对位置的GPS定位测量3.20GPS快速静态定位测量fast static GPS positioning利用快速整周模糊度解算法原理所进行的GPS静态定位测量3.21永久性跟踪站permanent tracking station长期连续跟踪接收卫星信号的永久性地面观测站3.22单基线解single baseline solution在多台GPS接收机同步观测中每次选取两台接收机的GPS观测数据解算相应的基线向量3.23多基线解multi-baseline solution从m(m>3)台GPS接收机同步观测值中,由m-1条独立基线构成观测方程统一解算m-1条基线向量3.24航摄GPS测量参考点reference point for GPS photographic surveying航摄GPS测量中计算动态基线的起算点3.25偏心向量eccentric vector飞机上GPS天线相位中心对航摄仪镜头中心的偏移向量3.26初始基线initialization baseline航摄GPS测量开始之前,参考点和飞机上GPS天线相位中心之间的距离3.27闭合基线closure baseline航摄GPS测量结束后,参考点和飞机上GPS天线之间的距离3.28运动测量kinematic surveying只需短时间的观测资料的连续差分载波相位测量的一种方式操作常数包括确定一已知基线或从一已知基点开始最少跟踪四颗卫星—个接收机应固定安装在一控制点上(已知点上)其他接收机在被测点间移动3.29单点定位point positioning一台接收机单独模式下的地理定位3.30绝对定位absolute positioning定位方式之一,定出某点在某一个特定坐标系上的位置,该坐标系通常是地心坐标系3.31相对定位relative positioning指通过两个站的接收讥同时司步地观测相同卫星来确定两个站的相对位置差的过程这种技术可以消掉两个站的共同误差,比如卫星钟差和预报星历误差,传播延迟等3.32静态定位static positioning一种接收机处在静止或几乎静止情况下的定位3.33动态定位dynamic positioning按时间顺序求解运动中的接收机的坐标每一组坐标只由一次信号取样来确定,且通常进行实时解算4 导航特性术语4.1汽车GPS导航系统in-vehicle GPS navigation system汽车GPS导航系统是以车载GPS接收机为基础,结合其他导航手段获得载体位置数据,并与导航地图数据库相匹配。