电机与拖动.(4)ppt.ppt
合集下载
电机及拖动基础课件第四版全演示文稿
第三十一页,共146页。
; 合成磁通
;n 电机转速
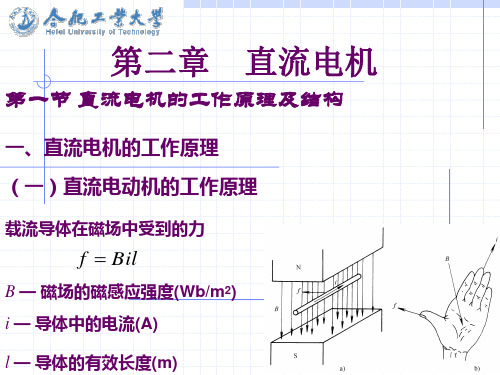
2-6 感应电动势和电磁转矩
P=2的直流电动机感应电动势分析
电枢空间位置与电角度的关系
N
元件的指定支路边电流变化波形
ia , Ф
+Ф
电角度
1
8
6
+
S
_
_
+
7
4
5
N
第三十二页,共146页。
3
0
π
2π
t
S
2
-Ф
由于磁极与换向电刷的配合,使电枢元 件边的电流极性与磁极极性总保持相 对一致性。当电流相角度发生半周变 化即π时,元件边切割的磁通也正好
1-1 磁路的基本定律
一、(电)磁场存在的基本要素
1. 磁场源,励磁源,励磁电流
2. 磁路,磁通路径
二、(电)磁场的基本物理量
1. 磁通
描述 通过一定横截面积的磁力线总数
符号
类型 矢量
量纲 Wb ; 1 Wb = 108 lines • 磁感应强度 ,磁通密度
描述 通过单位面积的磁力线数量
符号 B 类型 矢量
0 Bx ldx
由于每个磁极下的磁通为
0 Bx ldx
;Da 电枢转轴直径
第三十七页,共146页。
2-6 感应电动势和电磁转矩
电枢(P对磁极)总电磁转矩为
Tem
2p Z
4a
Ia
Cm
Ia
电磁转矩 Tem 的大小与每极磁通和电枢电流的乘积成正比
— 思考 —
1. 当电枢回路电流为零时,是否能确定Ea为零?
2-4 直流电机的励磁方式和磁场
一、直流电机的基本励磁结构
; 合成磁通
;n 电机转速
2-6 感应电动势和电磁转矩
P=2的直流电动机感应电动势分析
电枢空间位置与电角度的关系
N
元件的指定支路边电流变化波形
ia , Ф
+Ф
电角度
1
8
6
+
S
_
_
+
7
4
5
N
第三十二页,共146页。
3
0
π
2π
t
S
2
-Ф
由于磁极与换向电刷的配合,使电枢元 件边的电流极性与磁极极性总保持相 对一致性。当电流相角度发生半周变 化即π时,元件边切割的磁通也正好
1-1 磁路的基本定律
一、(电)磁场存在的基本要素
1. 磁场源,励磁源,励磁电流
2. 磁路,磁通路径
二、(电)磁场的基本物理量
1. 磁通
描述 通过一定横截面积的磁力线总数
符号
类型 矢量
量纲 Wb ; 1 Wb = 108 lines • 磁感应强度 ,磁通密度
描述 通过单位面积的磁力线数量
符号 B 类型 矢量
0 Bx ldx
由于每个磁极下的磁通为
0 Bx ldx
;Da 电枢转轴直径
第三十七页,共146页。
2-6 感应电动势和电磁转矩
电枢(P对磁极)总电磁转矩为
Tem
2p Z
4a
Ia
Cm
Ia
电磁转矩 Tem 的大小与每极磁通和电枢电流的乘积成正比
— 思考 —
1. 当电枢回路电流为零时,是否能确定Ea为零?
2-4 直流电机的励磁方式和磁场
一、直流电机的基本励磁结构
电机及拖动基础_(第四版)
11
第三节 直流电机的绕组
对绕组的要求:在能够通过规定的 电流和产生足够的电动势的前提下, 尽可能节省铜和绝缘材料,并且结构 简单、运行可靠。
一、简单的绕组
右图只是说明原理的示意图。它的缺 点是:随着电枢的转动,始终只有一个 线圈有电流。这样的话,材料没有充分 利用,产生的总转矩或电势均很小。 解决办法:用4个换向片将4个线圈都连接 起来,成为一个闭合绕组,两个不同的元 件边连接一个换向片。每个元件的两个元 件边连接2个不同的换向片。共用了4个换 向片,节省了材料,提高了输出转矩。
电枢反应后磁动势波形
1、有负载时气隙磁场发生了畸变 2、电枢反应呈现去磁作用
27
第五节 感应电动势和电磁转矩的计算
一、感应电动势的计算
直流电机无论作电动机运行,还是发 电机运行,电枢内部都感应产生电动势。
t 60 2 pn 2 pn 60
式中,n—电枢的转速;p—极对数。 根据电磁感应定律,一个匝数为 N y 的元件 中感应电动势的平均值为:
励磁方式
指直流电机的励磁线圈与电枢线 圈的连接方式 此外,电机铭牌上还标有其它数据,如励磁电压、出厂日期、 出厂编号等。 电机运行时,所有物理量与额定值相同——电机运行于额定状 态。电机的运行电流小于额定电流——欠载运行;运行电流大于额 定电流——过载运行。长期欠载运行将造成电机浪费,而长期过载 运行会缩短电机的使用寿命。电机最好运行于额定状态或额定状态 附近,此时电机的运行效率、工作性能等比较好。
6—槽底绝缘
电枢槽内的绝缘
1—换向片
2—连接片
8
第二节 直、额定功率PN(kW)
2、额定电压UN(V) 3、额定电流IN(A) 4、额定转速nN(r/min) 5、额定励磁电压UfN(V)
第三节 直流电机的绕组
对绕组的要求:在能够通过规定的 电流和产生足够的电动势的前提下, 尽可能节省铜和绝缘材料,并且结构 简单、运行可靠。
一、简单的绕组
右图只是说明原理的示意图。它的缺 点是:随着电枢的转动,始终只有一个 线圈有电流。这样的话,材料没有充分 利用,产生的总转矩或电势均很小。 解决办法:用4个换向片将4个线圈都连接 起来,成为一个闭合绕组,两个不同的元 件边连接一个换向片。每个元件的两个元 件边连接2个不同的换向片。共用了4个换 向片,节省了材料,提高了输出转矩。
电枢反应后磁动势波形
1、有负载时气隙磁场发生了畸变 2、电枢反应呈现去磁作用
27
第五节 感应电动势和电磁转矩的计算
一、感应电动势的计算
直流电机无论作电动机运行,还是发 电机运行,电枢内部都感应产生电动势。
t 60 2 pn 2 pn 60
式中,n—电枢的转速;p—极对数。 根据电磁感应定律,一个匝数为 N y 的元件 中感应电动势的平均值为:
励磁方式
指直流电机的励磁线圈与电枢线 圈的连接方式 此外,电机铭牌上还标有其它数据,如励磁电压、出厂日期、 出厂编号等。 电机运行时,所有物理量与额定值相同——电机运行于额定状 态。电机的运行电流小于额定电流——欠载运行;运行电流大于额 定电流——过载运行。长期欠载运行将造成电机浪费,而长期过载 运行会缩短电机的使用寿命。电机最好运行于额定状态或额定状态 附近,此时电机的运行效率、工作性能等比较好。
6—槽底绝缘
电枢槽内的绝缘
1—换向片
2—连接片
8
第二节 直、额定功率PN(kW)
2、额定电压UN(V) 3、额定电流IN(A) 4、额定转速nN(r/min) 5、额定励磁电压UfN(V)
电机与拖动技术完整版课件全套ppt教学教程

第1章 绪论
1.2本课程在专业中的作用、任务及课程目标
(2)课程目标 本课程是一门用电磁理论解决复杂的、具体的、综合的实际问题的课程 。在电机运行中,电机内同时存在电、磁、力的相互作用。因此本课程的目 标是使学生牢固掌握基本概念、基本原理和主要特性,学会结合电机的具体 结构、应用电机基本理论分析电机及拖动的实际问题,应掌握一定的电磁计 算方法,培养学生运算能力。 要求学生重视在教学过程中安排的实验、实 习,包括参观电机厂等实践教学环节。 具体要求是:
我国的电机工业,从新中国成立以来的50多年间,建立了独立自主的完整 体系。早在1958年我国就研制成功当时世界上第一台1.2万kW双水内冷汽轮 发电机,显示了我国电机工业的迅速掘起。近些年来,随着对电机新材料的研 究以及计算机技术在电机设计、制造工艺中的应用,普通电机的性能得到提高 ,而控制电机的高可靠性、高精度、快速响应使控制系统完成各种人工无法完 成的快速复杂的精巧工作。
从20世纪20年代起,开始采用由一台电动机拖动一台生产机械的系 统,称为单电动机拖动系统。与成组拖动相比,它省去了大量的中间传动 机构,使机械结构大大简化,提高了传动效率,增强了灵活性。由于电机 与生产机械在结构上配合密切,因而可以更好地满足生产机械的要求。
第1章 绪论
1.1电机和电力拖动技术的发展及在经济技术领域中的作用
第1章 绪论
1.1电机和电力拖动技术的发展及在经济技术领域中的作用
电能是现代能源中应用最广的二次能源,它的生产、变换、传输、分配 、使用和控制都比较方便经济,而要实现电能的生产、变换和使用等都离不 开电机。电机就是一种将电能与机械能相互转换的电磁机械装置。因此,电 机一般有两种应用形式。第一种是把机械能转换为电能,称之为发电机,它 通过原动机先把各类一次能源蕴藏的能量转换为机械能,然后再把机械能转 换为电能,最后经输电、配电网络送往城市各工矿企业、家庭等各种用电场 合。第二种是把电能转换为机械能,称之为电动机,它用来驱动各种用途的 生产机械和其他装置,以满足不同的要求。电机是利用电磁感应原理工作, 它应用广泛,种类繁多,性能各异,分类方法也很多。常见的分类方法为: 按功能用途分,可分为常规电机和控制电机两大类。按照电机的结构或转速 分类,可分为变压器和旋转电机。根据电源的不同,旋转电机又分为直流电 机和交流电机两大类。交流电机又分为同步电机和异步电机两类。
电机与拖动基础4

n0 f1
三相异步电动机的工作原理
三相异步电动机的工作原理
• 多极绕组的情况 • 分析过程说明—— 三相电流随时间变化 一个周期T,则旋转磁 场在空间仅仅转过半 周,180度 • 关系——旋转磁场的 转速与电流变化频率/ 极对数有关。 n0 f1 / p
具体旋转速度表示为转/分钟
n0 60 f1 / p
极距 相邻两个磁极的中心线在定子铁心内圆所隔开的圆弧长 度,称为极距 通常用 代表。极距 除用圆弧长度表示外, 也可用定子槽数或电角度表示。即: D 圆弧长度 2n p 360 p Q 180 (电角度) 或 1 = 2p 2p , 式中 D 为定子铁心内径;Q1 为定子槽数。 槽数
三相异步电动机的工作原理
2 . 三相异步电动机的工作原理
• • • • • 第一步了解旋转磁场的产生 第二步可以讨论三相异步电动机的工作原理 三相异步电动机有一个转子 转子结构——对称三相绕组,三相对称绕组是短路的 工作过程-电源提供励磁电流(定子)-电流建立运动 磁场(旋转磁场)-转子中产生感应电势-转子回路产 生感应电流-定子的磁场和转子的电流相互作用产生机 械运动
三相异步电动机的工作原理
• 图示,磁场处于上N,下S极 时,旋转磁场n0反时针旋转 (相当于转子向顺时针方向 运动)。 由法拉第电磁感应定律可得, 转子电动势方向和转子电流 方向;转子回路闭合,则有 电流将从上部纸面进,下部 纸面出。 根据洛伦兹电磁力定律,可 得转子受力方向;使转子反 时针旋转
•
三相异步电动机的定子绕组
多极绕组与电角度
a)
两极电机
b)
四极电机
两极电机与四极电机的磁极与绕组
极对数、机械角度、电角度 机械角度(机械角速度):1周为360度,在地面上看到的转子实际旋转的 角度和速度; 电角度(电角频率): 1周为360度,是以电、或磁信号的角度表示的。
三相异步电动机的工作原理
三相异步电动机的工作原理
• 多极绕组的情况 • 分析过程说明—— 三相电流随时间变化 一个周期T,则旋转磁 场在空间仅仅转过半 周,180度 • 关系——旋转磁场的 转速与电流变化频率/ 极对数有关。 n0 f1 / p
具体旋转速度表示为转/分钟
n0 60 f1 / p
极距 相邻两个磁极的中心线在定子铁心内圆所隔开的圆弧长 度,称为极距 通常用 代表。极距 除用圆弧长度表示外, 也可用定子槽数或电角度表示。即: D 圆弧长度 2n p 360 p Q 180 (电角度) 或 1 = 2p 2p , 式中 D 为定子铁心内径;Q1 为定子槽数。 槽数
三相异步电动机的工作原理
2 . 三相异步电动机的工作原理
• • • • • 第一步了解旋转磁场的产生 第二步可以讨论三相异步电动机的工作原理 三相异步电动机有一个转子 转子结构——对称三相绕组,三相对称绕组是短路的 工作过程-电源提供励磁电流(定子)-电流建立运动 磁场(旋转磁场)-转子中产生感应电势-转子回路产 生感应电流-定子的磁场和转子的电流相互作用产生机 械运动
三相异步电动机的工作原理
• 图示,磁场处于上N,下S极 时,旋转磁场n0反时针旋转 (相当于转子向顺时针方向 运动)。 由法拉第电磁感应定律可得, 转子电动势方向和转子电流 方向;转子回路闭合,则有 电流将从上部纸面进,下部 纸面出。 根据洛伦兹电磁力定律,可 得转子受力方向;使转子反 时针旋转
•
三相异步电动机的定子绕组
多极绕组与电角度
a)
两极电机
b)
四极电机
两极电机与四极电机的磁极与绕组
极对数、机械角度、电角度 机械角度(机械角速度):1周为360度,在地面上看到的转子实际旋转的 角度和速度; 电角度(电角频率): 1周为360度,是以电、或磁信号的角度表示的。
电机与电力拖动(伺服电机)PPT

伺服电动机
伺服电动机在自动控制系统中作为 执行元件故又称执行电动机,其功能是 把所接受的电信号转换为电动机转轴上 的角位移或角速度的变化。 伺服电动机包括异步伺服电动机和 同步伺服电动机。
异步伺服电动机
异步伺服电动机实质上是一个两相异步 电动机。 定子:励磁绕组和控制绕组(空间相差 90°) 。 运行时,励磁绕组始终加有交流励磁电 压,控制绕组则加有控Biblioteka 电压。异步伺服电动机
(1) 幅值控制,控制电压与励磁电压的相位差保持 90°不变,通过改变控制电压的大小来改变电动机 的转速。 (2)相位控制,控制电压与励磁电压的大小保持额定 值不变,通过改变它们的相位差来改变电动机的转 速。 (3)幅相控制。同时改变控制电压的大小和相位来改 变电动机的转速。
同步电动机
三相桥式整流电路
三相桥式逆变电路
同步伺服电动机
实验室伺服系统组成
Ethernet/IP
人机操作平台 PanelView 600
计算机
ControlNet
电 源 C E C P N N U B B
S E R C O S
ControlLogix系统
SERCOS
伺服驱动器
制动 模块
伺服驱动器
制动 模块
编 码 器 编 码 器
伺服驱动器
制动 模块
编 码 器
伺服电 动机
伺服电 动机
伺服电 动机
三轴精密定位平台
ControlLogix 系统
伺服驱动器Ultra3000-SE
三轴精密定位平台
创建工程Motion-control
控制器项目管理器
轴的参数设置
运动控制指令
伺服监控系统
SEW发展历史 德国SEW集团成立于1931年,坐落在德国巴登符腾堡州 的Bruchsal,是专业生产各种系列电机、减速机和变频控制 设备的跨国性国际集团。 SEW集团拥有世界上最先进的生产 设备,是世界同行业中水平最高、技术最先进的跨国公司, 产品营销全世界。目前在全世界设立10个制造中心,58个组 装厂及200多个销售服务办事处,遍布世界五大洲和几乎所 有的工业化国家,可以方便快捷地为世界各地的客户提供高 质量的产品及优质服务。 自从1995年进入中国以来,SEW公司得到了迅猛的发展, 先后在天津、苏州、广州、沈阳等地区建立制造中心和装配 基地业务涵盖多种行业和国家重点工程,为中国动力传动技 术的发展做出了巨大的贡献。
伺服电动机在自动控制系统中作为 执行元件故又称执行电动机,其功能是 把所接受的电信号转换为电动机转轴上 的角位移或角速度的变化。 伺服电动机包括异步伺服电动机和 同步伺服电动机。
异步伺服电动机
异步伺服电动机实质上是一个两相异步 电动机。 定子:励磁绕组和控制绕组(空间相差 90°) 。 运行时,励磁绕组始终加有交流励磁电 压,控制绕组则加有控Biblioteka 电压。异步伺服电动机
(1) 幅值控制,控制电压与励磁电压的相位差保持 90°不变,通过改变控制电压的大小来改变电动机 的转速。 (2)相位控制,控制电压与励磁电压的大小保持额定 值不变,通过改变它们的相位差来改变电动机的转 速。 (3)幅相控制。同时改变控制电压的大小和相位来改 变电动机的转速。
同步电动机
三相桥式整流电路
三相桥式逆变电路
同步伺服电动机
实验室伺服系统组成
Ethernet/IP
人机操作平台 PanelView 600
计算机
ControlNet
电 源 C E C P N N U B B
S E R C O S
ControlLogix系统
SERCOS
伺服驱动器
制动 模块
伺服驱动器
制动 模块
编 码 器 编 码 器
伺服驱动器
制动 模块
编 码 器
伺服电 动机
伺服电 动机
伺服电 动机
三轴精密定位平台
ControlLogix 系统
伺服驱动器Ultra3000-SE
三轴精密定位平台
创建工程Motion-control
控制器项目管理器
轴的参数设置
运动控制指令
伺服监控系统
SEW发展历史 德国SEW集团成立于1931年,坐落在德国巴登符腾堡州 的Bruchsal,是专业生产各种系列电机、减速机和变频控制 设备的跨国性国际集团。 SEW集团拥有世界上最先进的生产 设备,是世界同行业中水平最高、技术最先进的跨国公司, 产品营销全世界。目前在全世界设立10个制造中心,58个组 装厂及200多个销售服务办事处,遍布世界五大洲和几乎所 有的工业化国家,可以方便快捷地为世界各地的客户提供高 质量的产品及优质服务。 自从1995年进入中国以来,SEW公司得到了迅猛的发展, 先后在天津、苏州、广州、沈阳等地区建立制造中心和装配 基地业务涵盖多种行业和国家重点工程,为中国动力传动技 术的发展做出了巨大的贡献。
电机及拖动基础优秀PPT完整PPT
电机及拖动基础
iax I m
转子绕组作“两并一串”联接, 并且通入直流后所建立的磁动 势和磁场的基波分布图
iby
1 2
Im
icz
1 2
Im
绕线转子异步电动机的转子绕组通入直流电流 后,就成为一个电磁铁。
不论旋转磁极与电磁铁在起始时的相对位置如 何,结果总是旋转磁极的N极和S极分别与电磁铁 的S极和N极相吸。旋转磁极以同步转速旋转,则 必然拉着电磁铁也以同步转速旋转。这时异步电 动机就作同步运行。
恒功率、变励磁、不 计凸极效应时同步电 动机的电动势相量图
(二)转速特性及起动步骤
无平均电磁 转矩的情况
(s)t0
Te(t)
m UE0
Xds
sins
t
0
m U2
2s
1 Xq
1 Xd
sin2s
t
0
T
平均电磁转矩 Teav 0 Te(t)dt 0
第二节 无换向器电动机——自控式同步电动机 一、分类
串并联式
涡轮式
永磁同步电动机的转子结构图
2、磁路与参数问题 永磁体为横向结构的永磁同步电动机磁路示意图
3、起动问题
永磁同步电动机起动特性
1——异步转矩 2——发电机制动转矩 3——磁阻转矩 4——合成转矩
三、步进电动机
三相反应式步进电动机示意图
位置一
位置二
位置三
三相反应式步进电动 机的典型结构示意图
有最大电 磁转矩
无电磁转矩
有最大电 磁转矩
三、特点
1、维护简便 2、调速范围宽 3、控制方便 4、电动机能够使用于条件较恶劣的场合 5、快速性好
第三节 其他同步电动机
一、磁阻同步电动机
iax I m
转子绕组作“两并一串”联接, 并且通入直流后所建立的磁动 势和磁场的基波分布图
iby
1 2
Im
icz
1 2
Im
绕线转子异步电动机的转子绕组通入直流电流 后,就成为一个电磁铁。
不论旋转磁极与电磁铁在起始时的相对位置如 何,结果总是旋转磁极的N极和S极分别与电磁铁 的S极和N极相吸。旋转磁极以同步转速旋转,则 必然拉着电磁铁也以同步转速旋转。这时异步电 动机就作同步运行。
恒功率、变励磁、不 计凸极效应时同步电 动机的电动势相量图
(二)转速特性及起动步骤
无平均电磁 转矩的情况
(s)t0
Te(t)
m UE0
Xds
sins
t
0
m U2
2s
1 Xq
1 Xd
sin2s
t
0
T
平均电磁转矩 Teav 0 Te(t)dt 0
第二节 无换向器电动机——自控式同步电动机 一、分类
串并联式
涡轮式
永磁同步电动机的转子结构图
2、磁路与参数问题 永磁体为横向结构的永磁同步电动机磁路示意图
3、起动问题
永磁同步电动机起动特性
1——异步转矩 2——发电机制动转矩 3——磁阻转矩 4——合成转矩
三、步进电动机
三相反应式步进电动机示意图
位置一
位置二
位置三
三相反应式步进电动 机的典型结构示意图
有最大电 磁转矩
无电磁转矩
有最大电 磁转矩
三、特点
1、维护简便 2、调速范围宽 3、控制方便 4、电动机能够使用于条件较恶劣的场合 5、快速性好
第三节 其他同步电动机
一、磁阻同步电动机
顾绳谷_电机及拖动基础_第四版下_最全课件

第八章 电力拖动系统动力学基础
第一节 电力拖动系统的运动方程 “电力拖动”:以电动机作为原动机拖动机械设备运动的一种拖动方 式,又称电气传动。 电力拖动装置可分为电动机、工作机构、控制设备及电源等四个组成 部分。 电源 控制设备 电动机 工作机构
在许多情况下,电动机与工作机构并不同轴,而在二者之间有传动机构, 它把电动机的运动经过中间变速或变换运动方式后再传给生产机械的工 作机构。
titi第第ii个部件的总摩擦转矩个部件的总摩擦转矩t0it0i第第ii个部件的空载摩擦转矩个部件的空载摩擦转矩进入第进入第ii个传动机构的转矩个传动机构的转矩第一个部件的转矩第一个部件的转矩即为电动机转矩即为电动机转矩传送到第二个部件上的转矩传送到第二个部件上的转矩01传送到第三个部件上的转矩传送到第三个部件上的转矩02传送到第四个部件上的转矩传送到第四个部件上的转矩03传送到最后第传送到最后第mm11个部件上的转矩为个部件上的转矩为工作轴的转矩为工作轴的转矩为可整理成如下的形式可整理成如下的形式与以下电动机轴上的转矩式相比较与以下电动机轴上的转矩式相比较可得可得第五节第五节生产机械的负载转矩特性生产机械的负载转矩特性负载转矩特性
1
2
2M 2 2M d 2 2 2 2 1 2 1 2
1
2
3 d
4 14 2 2M 2 2 1 2 4
M 2 2 ( 1 2 ) 2
4、长度为L,宽度为d,质量为m的长方体:
m 2 J (L d 2 ) 12
GD 2 dn T Tz 0 375 dt GD 2 dn T Tz 0 375 dt 293.269 63.25 924.6 375 786.33N m 2
第一节 电力拖动系统的运动方程 “电力拖动”:以电动机作为原动机拖动机械设备运动的一种拖动方 式,又称电气传动。 电力拖动装置可分为电动机、工作机构、控制设备及电源等四个组成 部分。 电源 控制设备 电动机 工作机构
在许多情况下,电动机与工作机构并不同轴,而在二者之间有传动机构, 它把电动机的运动经过中间变速或变换运动方式后再传给生产机械的工 作机构。
titi第第ii个部件的总摩擦转矩个部件的总摩擦转矩t0it0i第第ii个部件的空载摩擦转矩个部件的空载摩擦转矩进入第进入第ii个传动机构的转矩个传动机构的转矩第一个部件的转矩第一个部件的转矩即为电动机转矩即为电动机转矩传送到第二个部件上的转矩传送到第二个部件上的转矩01传送到第三个部件上的转矩传送到第三个部件上的转矩02传送到第四个部件上的转矩传送到第四个部件上的转矩03传送到最后第传送到最后第mm11个部件上的转矩为个部件上的转矩为工作轴的转矩为工作轴的转矩为可整理成如下的形式可整理成如下的形式与以下电动机轴上的转矩式相比较与以下电动机轴上的转矩式相比较可得可得第五节第五节生产机械的负载转矩特性生产机械的负载转矩特性负载转矩特性
1
2
2M 2 2M d 2 2 2 2 1 2 1 2
1
2
3 d
4 14 2 2M 2 2 1 2 4
M 2 2 ( 1 2 ) 2
4、长度为L,宽度为d,质量为m的长方体:
m 2 J (L d 2 ) 12
GD 2 dn T Tz 0 375 dt GD 2 dn T Tz 0 375 dt 293.269 63.25 924.6 375 786.33N m 2
电机与电力拖动基础 (全)PPT教学课件
1
If —— 激磁绕组中的激磁电流; Rm —— 该段的磁组; Ф—— 磁通量
Φ
说明:当I较小时磁路的磁阻为气隙
2
磁阻且为常数,故If与Φ是线性的 If较大时铁心饱和,磁阻加大Φ增
加变慢If与Φ为非线性关系. 电机的饱和程度对电机的性能有很
0
大的影响.
If
二、主磁极磁势产生的气隙磁密在空间的分布
气隙磁密的概念:
本课程的性质、任务及学习方法
1、性质:在工业电气自动化专业中,《电机原 理及拖动》是一门十分重要的专业基础课或称 技术基础课。
2、任务:我们所从事的专业决定了我们是从使 用的角度来研究电机的。因此,我们着重分析 各种电机的工作原理和运行特性,而对电机设 计和制造工艺涉及得不多。但对电机的结构还 要有一定深度的了解。
1.静止部分 (1)主磁极:由极身和极掌组成,固定在磁轭
(机座)上.在磁极上套入激磁绕
组(线圈).主磁极总是偶数,且N
磁轭
极和S极相间出现.极掌对激磁
极掌极身
线圈 绕组起支撑作用,且使磁通在气
隙中有较好的分布波形.
(2)换向极:它位于相邻两主磁极之间,构造与主磁极相似,其 作用是为了消除在运行过程中换向器产生的火花.
自锁电路目录?第一章直流电机原理?第二章电力拖劢系统的劢力学基础?第三章直流电劢机的电力拖劢?第四章发压器?第五章三相异步电劢机原理?第六章三相异步电劢机的电力拖劢?第七章同步电劢机?第八章控制电机?第九章电力拖劢系统中电劢机的选择3学习方法
电机及拖动基础
电路
由金属导线和电气以及电子部件组成的导电回路称为电路。 电路导通叫做通路,只有通路才有电流通过。 电路在某一处位置断开,叫做断路或开路。
电机拖动(动力学)ppt课件
电动机
1J1 m Tm Jm
电动机
T
Jeq 等效负载
j1
生产机械
Tmeq
j2 折算原则:折算前后系统动能不变
1 2
Jeq 2
1 2
Jmm2
1 2
J112
1 2
JR 2
Jeq
Jm j2
J1 j12
JR
除以 12
2
乘以4g
上15下
GDeq2=
GDm2 + j2
GD12 + j12
电力拖动系统的运动状态:
Tem
T
L
当Tem TL ,
dn 0 , 稳态匀速n M
dt
当Tem TL ,
dn 0 , 暂态加速
dt
当Tem TL ,
dn 0 , 暂态减速
dt
上10 下
二、转动惯量及飞轮惯量(飞轮矩)
转动惯量是物体绕定轴旋转时转动惯性的度量
J
mi
GDR2
JR
GDR2
T
GDm2 + j2
电动机
其中:修正系数=1.1~1.25
1J1 m Tm Jm
多轴系统等效为单轴系统 j1
生产机械
后的运动方程为:
j2
Tem
TL
GDe2q 375
dn dt
T
电动机
Jeq 等效负载
其中: TL= T0+ Tmeq
T0 Tmeq
上16 下
第四节 负 载 的 机 械 特 性
2
ri
r2dm