数码印花机控制板使用说明
杭州宏华DBP数码喷墨印花机简明操作流程

杭州宏华DBP-2200数码喷墨印花机简明操作流程1. 开启实验室总电源(进门左手AL-C-1电源箱)。
2. 合上7#电源箱的电闸(喷墨印花机后边的墙上)。
3. 开启喷墨印花机总电源喷墨印花机左后侧的POWER SWITCH 电源开关顺时针旋至“ON ”状态。
4. 打开导带机电源开关 将导带控制面板上的POWER 旋钮旋至“ON ”状态。
5. 打开喷印头的主机电源,初始化主机 点击主机操作面板上的POWER 按钮,LCD 显示屏出现““I I n n i i t t i i a a l l i i z z e e P P l l e e a a s s e e w w a a i i t t ””,主机自行初始化;初始化完毕,LCD 显示屏上出现6.打印测试条,检查喷头状态(1)在靠近导带的打印起始边(右手侧)横向连续铺4张A4纸,纸张尽量铺平整,不能出现卷边现象【以防打印头来回移动时,刮蹭喷头】;摁下导带控制面板上的Withdraw 按钮,将A4纸送至打印头下方。
(2)点击主机操作面板上MENU 旁的,下翻至(1/6),[[** S S e e t t u u p p M M e e n n u u **模模式式]] ,此时LCD 显示屏出现(3)点击F F 33键键,进入Test Print 模式,LCD 显示屏出现此时,点击与Nozzle Check 对应的F F 22键键,进入[[P P r r i i n n t t i i n n g g 模模式式]], 打印头开始自右向左移动,在A4上喷印出两组1234数字和线条。
(4)仔细观察各线条,看有无“断线”现象发生?!如有“断线”情况出现,请立即执行喷喷头头清清洗洗操作。
【【喷喷头头清清洗洗操操作作】】[[R R e e a a d d y y t t o o p p r r i i n n t t 模模式式]]下,点击F F 44键键,进入[[**C C l l e e a a n n i i n n g g **模模式式]]【【A A 】】单单个个喷喷头头喷印的线条出现断线情况:譬如 数字“2”所在处的线条出现断线,[[**C C l l e e a a n n i i n n g g **模模式式]] 下,多次摁F F 11键键,至A A L L L L 变为H H e e a a d d 22;点击主机操作面板上的[[E E N N T T E E R R ]]键键,LCD 显示屏上出现“Cleaning rest * min ”。
多功能数码印像机中文

操作警示1.在使用本机前,请先检查机器的核定电压是否与电网供电电压符合,是否有可靠的接地保护连接。
2.更换烫印发热部件时,必需先关机并拔去总电源插头。
在更换仍处在高温状态下的烫印头时,请戴好隔热手套。
3.使用过程中避免发热部件的长时间空烧,如不切断电源,请放置一件专门用来防空烧的类似烫印物件(报废品即可,可反复使用)。
注意勿让烫印物件的尖锐部分对各加热部件造成损伤。
4.使用过程中避免人体触及发热部件,防止灼伤。
5.使用过程中避免体触及压力弹簧,防止对人体可能的损伤。
6.手把下压时,如感觉压力过大难以下压,请调节升降调接手轮抬高机头,减少压力弹簧压缩量,否则会损害机器的机械强度。
7.升降机头时,须先将机头锁紧手柄旋松。
另外,到下降极限时会感到升降调节手轮上有明显的阻力,不要继续作无谓操作。
8.锁定机头时,机头锁紧手柄不需过度旋紧,手感有明显阻力即可。
9.不要让未成年人在无人监护的条件下触及机器,即使在不使用机器时!!!10.严禁烤盘垫烤制其他物品,烤盘垫仅限于烤制瓷盘。
烤盘垫、烤杯垫避免空烧。
PAGE:1操作说明1.检查烫印头连接插头是否已与电控箱连接插座可靠连接。
2.插上电源,打开电源开关。
(本机额定电压220V,最大输入功率1250W)3.设定操作程序:(本设备温度显示为华氏度)起始温度:按模式设定键一次,此时设定指示灯亮,按加法键或减法键设定起始温度。
最高温度:按模式设定键第二次,此时温度指示灯亮,按加法键或减法键设定最高温度。
最高温烘烤时间:按模式设定键第三次,此时时间指示灯亮,按加法键或减法键设定最高温烘烤时间。
待执行状态:按模式设定键第四次,机器进入待执行状态。
注:起始温设定范围200~380度,最高温设定范围200~430度最高温烘烤时间设定范围0~999秒。
本机带有温度设定自锁功能,即如起始温度设为340度,机器将自动限定最高温设定范围为340~430度。
反之,如先设定最高温度为250度,则机器将自动限定起始温设定范围为200~250度。
数码印花机控制板使用说明
预留(OUT) 0V 未定义
载
24V-(OUT) 无 24V 负电源输出
GND1(IN)
无 和旋转编码器地相连
B(IN) P7
A(IN)
0/5V 和旋转编码器 B 相连 0/5V 和旋转编码器 A 相连
0.3mm 以上 屏蔽线
5V-1(OUT) 无 悬空
A+(OUT)
0/5V 接伺服控制器 PLUS+
4、手动自动加热:当导带转动时输出加热信号,控制加热器自动加热。手动加热时加热器不 受自动加热控制。为防止加热器频繁启动停止,控制板在接收到转动信号后延时 5 秒(P6 参 数设置)输出自动加热,当转动信号停止输入时延时 20(P7 参数设置)秒停止输出自动加热
5、伺服控制器输出功能:PLUS+、PLUS-、DIR+、DIR-,旋转编码器输入功能:A 、B、5V、GND;
二接线说明所属端子端子标识有效电平功能描述推荐线缆p224vin控制板电源24v正输入075mm以上两芯屏蔽线24vin控制板电源24v负正输入p924vout左纠偏传感器电源正03mm以上左偏in0v左纠偏信号输入24vout左纠偏传感器电源负p1024vout右纠偏传感器电源正03mm以上0v右纠偏信号输入24vout右纠偏传感器电源负p1124vout24v正电源输出信号线03mm以上电源线根据负载不同作相应更改0v联机信号无输入时输出伺服电机正向转动信号0v信号输入时收布电机反转联机in0v信号有效时输出伺服电机转动受输入的ab编码器控制不受正反转控制反转in0v联机信号无输入时输出伺服电机反向转动信号上限in0v此信号有效时停止收布24out24v负电源输出下限in0v此信号有效时开始收布24v转动24v信号有效时说明导带在转预留in0v未定义5v转动in5v信号有效时说明导带在转动此端子只接受5v信号高于5v的电压会造成硬件不可逆的损坏24vout24v负电源输出p1224vout24v负电源输出由负载决定可以稳定驱动500ma纠偏1out0v对应右纠偏信号输出纠偏2out0v对应左纠偏信号输出收布out0v接收布电机的收布控制放布out0v接收布电机的放布控制自动out0v导带转动自动加热输出预留out0v未定义24vout24v负电源输出p7gnd1in和旋转编码器地相连03mm以上屏蔽线05v和旋转编码器b相连05v和旋转编码器a相连5v1out悬空p8aout05v接伺服控制器plus03mm以上屏蔽线aout05v接伺服控制器plusbout05v接伺服控制器dirbout05v接伺服控制器dir有效点电平
数码印的操作方法

数码印的操作方法
数码印是一种将数字图像直接印刷到特殊媒体上的打印方法。
下面是数码印的一般操作步骤:
1. 准备工作:
- 确保计算机连接了数码印机,并安装了相关驱动程序。
- 打开数码印软件,如Photoshop或CorelDRAW。
2. 准备图像:
- 打开你要打印的图像文件。
- 调整图像的大小和分辨率,以适应你打印的媒体尺寸。
3. 打印设置:
- 在数码印软件中选择“打印”选项。
- 选择数码印机为打印机设备。
- 根据需要选择打印质量和颜色设置,如彩色、黑白等。
- 选择适合的媒体类型,如照片纸、防水纸等。
4. 调整打印参数:
- 根据需要设置图像的亮度、对比度、色彩饱和度等参数。
- 选择图像的打印方向,如横向或纵向。
- 根据需要设置打印多少份和是否打印多个图像在一张媒体上。
5. 打印:
- 点击“打印”按钮开始打印。
- 等待数码印机将图像印刷到媒体上。
时间取决于图像的大小和复杂程度。
6. 完成:
- 当打印完成时,取出媒体,根据需要进行修剪和后续处理。
- 检查打印品质,如果不满意可以尝试调整打印参数再次打印。
请注意,在使用数码印时,确保按照数码印机和软件的使用说明进行操作,以确保获得最佳的打印效果。
印刷机操作说明书

文件名称
印刷机操作说明书
文件编号
WI-ED-001
版次
A/0
页次
1/1
操
作步骤
1、开启机器电源
2、输纸装置:
2.1飞达的吸风和吹风:首先将飞达前后上下位置调整到纸张所适应的工作状态,然后根据纸张的厚薄调整飞达的吹风和吸风大小。
2.2双纸控制器:根据纸张的厚薄及纸张的透光度来调整双张控制器的灵敏性。
前侧规的工作位置:根据纸及压纸轮、毛轮的位置和压力,纸张的厚度的大小调整前规高低,平放三张所要生产的纸于前规处,确定好纸尾毛轮及压纸轮的位置和压力。
3、印前准备:
3.1故障检测:看清CP窗是否锁车,润滑、酒精、水、润版故障显示并排除。
3.2压力、飞达收纸位置:打开CP窗印刷材料菜单,输入纸张厚度、纸张大小,按确认即可。
4、根据纸张正确放置压纸导轮和钢片,正确调节风量、压纸钢片高低,以避免纸第歪斜。
5、机器周围严禁堆放易燃、易爆物品,下班时关电源。
6、根据机长排好的色座排好相应的印版。
7、装版时将咬口、版尾的螺丝松至0位,将顶版螺丝松至相应位置。
8、电脑输入尺寸后检查是否达到需要的位置。
9、确保收纸平整,无擦花现象。
√
递纸/压印/传纸滚筒牙排、水斗辊和计量辊
√
添墨辊摆动轴、墨斗辊超越离合器、水/墨辊、收纸链排
√
核准
审查
制订
制订日期:
2017年04月01日
4、收纸部分:
4.1纸压风、吸风:根据收纸的情况调节风量,确保收纸平整,无擦花等现象。
4.2平纸器:当产品尾部弯曲不平时,可打开平纸器来舒展纸张。
4.3喷粉大小:根据产品的墨量大小来调节。
美甲彩绘机简易指甲印花机使用说明

美甲彩绘机简易指甲印花机使用说明1、购买后1.取下印头,用棉花蘸洗甲水擦洗胶头数遍,使胶头呈模糊状,否则将转印不上图案;2.撕去图案板上的保护薄膜;注意:切勿按下刮板,在未放图案板时将机头推至前方,这样会使刮板卡住。
出现这种情况,切勿用力来回拉动。
请按机头两侧的刮板松放钮,并用尖薄利器轻撬刮板。
2、彩绘前1.将彩绘机顺着要彩绘的手的方向平放于玻璃面或光洁的桌面上,向前扳动吸力把手,将彩绘机固定,机头置机器中心位置。
2.简单的修理、清洁指甲后,可涂上一层底油(市面上任何的指甲油都可以,但彩绘图案务必使用随机配送的专用指甲油)或亮光油来增强指甲表面的着色力,待其完全干后方可彩绘。
3、彩绘时1.放松指甲定位器紧锁把手,将手指放于手指定位器上,指腹推着指甲定位器止档,指腹以外的指甲搁在定位器上方。
图案的中心将会印于中心线所示的位置(参阅图二)要改变指甲上图案的位置,可向前后滑动手指。
决定好位置后,你必须顺着弧度向逆时针扳转锁紧把手固定止档;2.把你喜欢的图案板置于凹入的图案板定位器中,将最小的号码(单色图案为“0”,多色图案则从“1”开始)对着机身中心放置。
将喜欢的指甲油涂覆于确定好的图案上(参阅图三),再将机头向前推,滑过图案板直至完全停止,迅速按下印头,然后将机头向后拉,直至完全停止,并再度按下印头,图案就转印到你的指甲上了(参阅图四),将机头推回机器中心。
注意:要求彩绘过程速度稍快,否则在图案转印到指甲之前指甲油即可能干掉而导致印不上;3.要彩绘多色图案时,可在印上图案的第一图层后,取起图案板并按逆时针方向转至图案顺序的下一图层(图案的第一图层为“1”,第二图层为“2”,依序类推);4.重复第2步骤。
注意,多色图案彩绘时,图层与图层之间的操作当中,尽可能保持手指在定位器中不动,使图案得以正确套印。
5.除了可以彩绘指甲外,还可以把图案转印脚趾、杯子、手机、小饰物等你所想印的任何地方,操作顺序与彩绘指甲一样,只要把印头取出,直接印到你想印的地方即可;6.在手机等贵重饰品的塑料面上印图案时如出现错印等问题,待其完全干后,用指甲轻轻刮掉即可,切勿用亮光油涂覆表面,也勿用洗甲水清洗,否则会腐蚀塑料表面;7.在彩绘了六、七个图案后,按下机头两边的刮板松放按钮,刮板即会弹起(用一个手指轻护刮板以免飞出),(参阅图五)用棉签蘸洗甲水清洗,刮刀周围尽量保持干净,清洁后将刮板放回机头,用力按下,切记必须听到两声喀啦声,与机头齐平,否则会造成图案漫开(参阅图六);8.8.有下列情况时将需要清洗印头;(1)前次图案未能全部转印;(2)忘记将刮板放入定位或没有完全按下与机头平齐;(3)印了十个左右图案后4、彩绘后1.可在图案上稍加点缀(如花芯、动物的眼睛及其他你认为需要点缀的地方点上亮粉或镶钻)最后擦上亮光油保护图案,以避免刮落或褪色。
平板数码印花机操作说明书
平板数码印花机操作说明书
平板数码印花机一直以来都是备受纺织界的青睐,服装、皮革、玻璃界大多数的人都改改用了数码印花机来做主要的印刷工具,这样不但省下了很多的时间,人力物力,更加提高了工作的效率,但有一点的是,服装印花机的操作人员不用很多个,都是全自动的,但就那么的几个技术人才市面上就很难找到;所以我今天给大家分享一个关于数码印花机的操作说明:
1、供墨系统及自动纠偏装置:张力控制、步进控制是高速印花设备成
功的关键,它是综合机械、电子、计算机技术的复杂体系,也是保
证印花精度的关键技术。
东莞基汇成功地实现了高精度的张力、步
进控制。
确保面料平整准确连续输送!
中国网印特印网
2、高品质吸附性导带及自动清洗系统:清洗系统的毛刷、刮刀会自动清洗导带,去除灰尘和墨水,并进行干燥,保证导带的干净整洁。
3、布料干燥及收布装置:电加热空气干燥,布料在通过电热风出口风干后,自动收布机主动布到硬纸管上。
4、在数码打印机打印中可以自由改变喷头电压、打印速度、双向校准、更改步进等打印参数,不需中继打印,断电续印功能。
平板数码印花机操作说明

平板数码印花机操作说明以下是平板数码印花机的操作步骤:1.准备工作a.将平板数码印花机放置在平坦的、干净的工作台上,确保机器处于稳定状态。
b.检查机器是否正常运转,是否有损坏或故障。
c.准备好设计图案,确保图案的分辨率和颜色都符合要求。
2.连接机器a.将机器的电源线插入电源插座,并打开电源开关。
确保机器显示屏上显示正常。
b.将电脑或其他设备与平板数码印花机连接,确保传输正常。
3.加载物料a.根据需要选择适合的平板材料类型,例如纸质材料,塑料材料,皮革材料等。
b.将平板材料放置在机器的工作台上,并用夹子固定住。
确保材料平整并且固定牢固。
4.调整设置a.设置机器的印刷参数,包括印刷模式(单色、彩色等)、打印速度、打印分辨率等。
b.根据设计图案的要求,调整机器的喷头(打印头)高度和位置,确保喷头与材料之间的距离适当。
5.开始印刷a.在电脑或控制面板上选择需要印制的设计图案,并将其发送给平板数码印花机。
b.机器开始工作后,观察印刷过程,确保喷头均匀地将墨水喷射到材料上。
c.印花完成后,等待墨水干燥(时间根据墨水的类型和材料的吸水性而定)。
6.清洁和维护a.印花完成后,将机器中的残留墨水清洗干净,确保墨水不会干结在喷头上。
b.定期清洗机器和更换墨水盒、墨色瓶等耗材,以保持机器的正常运转和印刷质量。
需要注意的事项:1.在操作平板数码印花机时,应注意自身安全,避免手指接触到喷头或进入机器内部。
2.确保机器工作环境干净,并避免灰尘、杂质等物质进入到机器内部。
3.选择高质量的墨水和材料,以确保印花效果的质量和持久性。
4.根据机器的规格和使用手册的要求,合理使用机器,避免过度使用导致机器损坏或故障。
通过以上的操作步骤,可以轻松地操作平板数码印花机,完成高质量的印花工作。
同时,注意操作中的安全事项和维护保养,能够延长机器的使用寿命,并提升印花效果的质量。
数码印花机培训手册

培训原则
420系列数码印花机是美可达公司开发的新型平板式数码喷墨印花机,应用范围广。 它与传统打印机操作有所不同,因此需要操作人员具有一定动手能力和基本维护能力。 我们会按合同上约定的方案对操作人员进行技术培训。
培训要求: 人员要求:具有基本的计算机使用基础和对打印机的简单认识,思维敏捷
接受能力强。 地点要求:培训人员需到我公司指定地点培训。 培训方式: 针对客户的操作人员进行培训,采取技术培训工程师
国内型后物理限位
meikeda
数码科技 创造多彩生活
Digital technology to create colorful life
打印机部左右视图
图一 齿轮传动组合
meikeda
图二 Y轴码盘所在位置
数码科技 创造多彩生活
Digital technology to create colorful life
和培训人员一对一的方式。其中以实际操作为主。同时提供样机上机实习 。
meikeda
数码科技 创造多彩生活
Digital technology to create colorful life
培训时间: 培训课时为24个小时,分3个工作日完成
培训项目: IPrint 数码印花机软件使用;数码印花机硬件操作 与维护等培训。
Digital technology to create colorful life
meikeda
“on”
为开机按纽
“off”
为关机按纽
“left lever” 手动加热按纽
“right lever”预留功能
数码科技 创造多彩生活
Digital technology to create colorful life
爱普生墨仓式专业数码印花机 SureColor F9380 说明书
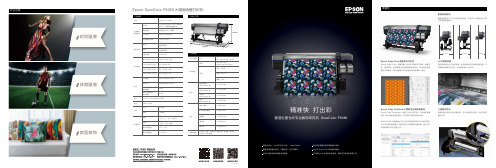
精准快 打出彩Epson Edge Print 爱普生RIP软件爱普生重新设计了打印机的硬件结构,令其可以方便的适合打印工作或者运输状态。
更紧凑的结构LED照明系统行业应用家居装饰时尚服装体育服装型号SureColor F9380主要部件技术参数打印头双PrecisionCoreTM TFP微压电打印头 (智能墨滴变换技术)喷嘴设置每种颜色1440个喷嘴打印方向双向打印\单向打印本机最高分辨率720x1440 dpi墨水系统墨水爱普生“活的色彩DS”热转印墨水颜色青色、洋红色、黄色、高浓度黑色墨水容量3000ml/色打印速度360x720dpi 1 pass 108.6平方米/小时720x720dpi 2 pass60平方米/小时720x720dpi 3 pass44.1平方米/小时720x720dpi 4 pass29.9 平方米/小时介质介质幅宽300-1626mm(64in.)卷纸尺寸卷纸最大外径250mm本机可承载最大卷纸重量45kg本机可容纳最大纸张厚度1 mm接口USB 2.0, 100/1000MB 以太网语言ESC/P raster内存主机512MB网络128MB环境条件温度运行:15°C - 35°C(20°C - 30°C推荐)湿度运行:20% - 80%(40% - 60%推荐)墨水保存温度 15℃-25℃墨水运输温度 5℃-35℃产品参数914mm收纸器搓纸轮进纸器高稳定性爱普生半色调技术将决定在喷墨中使用大中小墨滴的比例(即VSDT技术)以及墨滴的离散排布算法。
最终,可精确将连续色调的图像进行数字化,减少画面的颗粒感。
爱普生微羽化技术降低打印横纹现象,应用在了所有的打印模式上。
是依靠一个算法故意分散墨点的排布,来弥补进纸误差,消除打印横纹现象。
分散墨点的程度在高质量打印模式中更大,高质量模式下,打印横纹现象效果最不明显。
喷头保护装置可以有效地避免打印头和起皱的介质表面发生刮擦,从而避免打印头的物理损伤和用户的宕机时间。
数码印花机培训手册ppt课件

数码科技 创造多彩生活
Digital technology to create colorful life
组件配件图片
图一
图二
图三
图四
图五
数码科技 创造多彩生活
Digital technology to create colorful life
图六
工装
COMPANY LOGO
数码印花机系统介绍
数码科技
创造多彩生活
Digital technology to create colorful life
国内型数码印花机
1.420A 主要应用于服装方案,采用五色墨 水(CMYK+W),适应布料为纯棉。
2.420B 主要应用于硬质材料方案,采用六色 墨水(CMYK+LC、LM),适应材料有: 磁砖、玻璃皮革、木板、亚克力、KT板等。
Digital technology to create colorful life
墨头排线转接板
数码科技 创造多彩生活
Digital technology to create colorful life
平台运行控制板
数码科技 创造多彩生活
出口型泵组件及废墨收集桶位置图二
图 三
图四
数码科技 创造多彩生活
Digital technology to create colorful life
出口型泵组件及废墨收集桶位置图三
图五
图六
图七
数码科技 创造多彩生活
Digital technology to create colorful life
国内型前激光限位
数码科技 创造多彩生活
2010多功能家用电脑绣花机使用说明书(中文)
多功能家用电脑绣花机使用说明书感谢你选择我们的电脑绣花机你的机器是一部先进的家用电脑绣花机。
为充分享用机器的全部功能,建议你学习本书。
机器功能:1)简单的梭芯绕线梭芯可以快速、轻松地绕线。
2)自动穿线可以自动穿线。
3)绣花及编辑花样你可以绣内置的绣花花样、字母、以及U盘中的花样,并对花样进行编辑保存。
4)系统设置和升级你可以选择系统语言、系统升级和测试。
安全操作1.使用后、清洁时或进行本说明书中提到的用户维护调整操作时,或者机器无人看管时,请务必从电源插座中拔出机器的电源线插头。
(为了加降低触电的危险)2.当电源线或插头破损时、机器不能正常工作、发生过跌落或损坏或溅上水时,切勿继续使用。
请将机器送到最近的授权经销商或维修服务中心,请专业人员对其进行检修,或进行电气或机械调整。
3.请务必保持工作区域的整洁:●操作机器时切勿堵塞任何通风口。
要确保机器的通风口中不要堆积任何飞绒、灰尘或碎布。
●请勿使用拖线板接插电源。
请务必将电源线插头插入直接插入电源插座。
●切勿让任何物体掉进开口或将物体插入开口。
●请勿在使用喷雾剂或存放氧气的场所使用本机。
4.绣花时要特别小心:●请务必注意针。
请勿使用弯曲或损坏的针。
●请勿用手指触碰任何运动部件。
在绣花针附近要特别小心。
●请勿使用损坏的或不正确的针板,否则会导致断针。
●绣花时请勿推拉布料。
5.请勿将本机作为玩具使用:●当儿童使用本机或使用机器时附近有儿童时,请务必悉心看护。
●请勿在室外使用。
6.刺绣过程中,不要靠近飞轮、跳线部分、针及其它转动部件。
7.在下列情况中,应关闭电源并从插座拔下插头。
(1)加工完成(2)换针或其它零件(3)使用中电压不稳(4)维修机器(5)机器无人管理时8.直接把机器电源线插到插座,不要中间加其它连接线。
延长使用寿命1.放置机器应避免日光直晒或高湿度的地方,不要放在加热器、熨斗或其它热源附近。
2.只能用中性肥皂或洗涤剂,绝不能用苯、香蕉水或去污粉擦壳,否则会造成损害。
天虹电脑绣花打版系统说明书
天虹电脑绣花打版系统说明书概况“天虹”电脑绣花打版系统的操作采用“人机对话”方式,而功能选择采用“菜单”形式,本系统的基本菜单有:主菜单,功能菜单,副菜单,修改菜单,参数菜单,这些菜单又会派生出另外许多菜单来,功能菜单位于屏幕的下端,其它菜单位于屏幕的右边,但不是一次出齐,当你选择完一种菜单后,相应的菜单才会出现,方便你迅速找到你要的功能,整个编辑过程中,你可以根据屏幕上的提示用电笔在数化仪上进行输入,键盘只是作为一种辅助手段,可用可不用,但在图案命名时必须使用。
屏幕画面介绍怎样使用菜单菜单的每项功能前都有与相应的数字和字母,这些数字和字母表键盘的键位,这样,除用电笔操作外,也可用键盘操作各菜单功能,当你选择一项菜单后,这此菜单又会派生出另外的菜单来。
例如:开机后,在图案编辑前,屏幕显示用电笔将光标移到修改菜单,屏幕显示这时,屏幕显示的是修改菜单,每项功能前都有与之相应的字母或数字,方便操作人员迅速找到所要的功能。
例如:若你选择键盘上的键位“8”将又派生出图案修改菜单来。
屏幕将显示:打版功能所谓打版即是图案的编辑,是打版系统要做的最主要工作,软件的绝大部分功能都是为这项工作服务的,开机后,如果电脑记忆内有图案,则显示:如要清除,按“2” ;是则按“1” ;则内存花版重现在屏幕上,如记忆内无图案,屏幕将显示:这是主菜单画面,请将光标移到“1打版功能”按一下电笔,屏幕显示所要选择的颜色,以供操作人员选择。
这里的颜色并不等于绣品的颜色,选颜色只是作为一种标记,让打版师明了图案总共有几种颜色,那一种先绣,那一种后绣,以方便安排绣线的次序,绣品的色取决于所用的色线本身。
选颜色时是光标移到你所要的颜色上,按一下电笔,屏幕显示:所选倍数应该同图纸的放大倍数一致,选倍数,屏幕显示:可根据图案的需要设定起针点,方法是电笔在起针的位置压一下,屏幕显示:上面的画面中有一“X”记号,这就是你刚才设定的起针点,至此你已完成工作,可进入图案的编辑。
喷墨印花机操作规程

喷墨印花机操作规程喷墨印花机是一种常用的印花设备,广泛应用于纺织、服装、家纺、制鞋等行业。
为了保证喷墨印花机的正常运行和操作安全,需要遵守一定的操作规程。
以下是喷墨印花机的操作规程,供参考。
一、安全操作规程1. 操作前应穿戴好个人防护装备,包括安全鞋、安全帽、口罩和手套等。
2. 在操作时应避免身体直接接触到机器零部件,特别是旋转部件。
3. 严禁在设备运行时拆卸或调整机器部件,以免造成安全事故。
4. 使用过程中不得将手指、头发等物品靠近喷墨头,以免发生危险。
5. 使用完毕后应关闭设备电源,确保设备安全停止运行。
二、设备操作规程1. 设备开启:按下电源开关,待设备系统自检完成后,按下启动按钮,设备即可开始工作。
2. 墨水供应:检查喷墨机设备内墨水的供应情况,确保墨水充足。
如需添加墨水,应按照设备说明书的要求进行操作。
3. 打印文件准备:将需要打印的文件导入电脑,并根据需要进行编辑和调整。
4. 连接设备:使用标准的数据线将电脑与喷墨印花机连接。
5. 调整打印参数:根据需要设置合适的打印参数,包括打印速度、分辨率、墨水量等。
6. 打印操作:按下打印按钮,设备即可开始打印操作。
过程中需要时刻观察打印效果,如有异常情况及时停止打印。
7. 打印结束:打印完毕后,关闭喷墨印花机和电脑,注意及时清理设备,保持设备干净。
三、日常维护保养1. 定期检查设备各部件的连接情况,如有松动应及时调整固定。
2. 定期清理喷墨头和墨水盒,避免堵塞和积累。
3. 定期检查喷墨机内墨水的供应情况,及时补充墨水。
4. 定期检查设备电源和线路的安全状态,确保正常供电。
5. 定期维护喷墨机的运行轨迹,保证设备的顺畅运行。
6. 遵守设备制造商的维护保养要求,按时维修和更换设备部件。
通过合理的操作规程,可以提高喷墨印花机的使用效果和寿命。
操作人员在操作前应深入了解设备的使用方法,并根据设备说明书严格执行操作规程,避免设备损坏和安全事故的发生。
同时,日常的维护保养工作也是保证设备正常运行的重要环节,操作人员应按照规定的维护保养周期进行维护,及时发现并解决设备故障。
飞蝶FD5193E-3200说明书

亲爱的客户,我们诚意带给您良好的品质。
操作流程简介序言 (01)安全指导 (02)第一章 打印机概述 (07)第二章 电脑配置准备2.1 台式电脑配置要求 (08)2.2 笔记本配置要求 (08)第三章 硬件准备硬件认识 (09)第四章 系统连接示意图 (10)第五章 软件的压缩包和安装5.1 软件安装步骤 (11)5.2 板卡指示灯说明 (14)第六章 软件校准6.1 校准 (16)6.2 高级设置 (24)6.3 喷头电压 (25)6.4 作业属性 (25)6.5 设置齿轮比 (25)第七章 后台工具后台工具简介 (27)第八章 蒙泰安装及使用8.1 蒙泰安装 (29)8.2 蒙泰使用简介 (31)第九章 日常维护 (36)第十章 喷头的保养和维护...............................................................37序言非常感谢您购买打印机●为了确保全面了解本产品性能和正确安全地使用,请务必通读本手册并将其妥善保管。
●禁止全部或部分非法复制本手册,否则本公司将依法追究其法律责任。
●本手册的内容和本产品参数若有改动,恕不通知。
●我方已尽力编辑本手册并检测本产品,如果您发现任何错误,请告知我们,我们将万分感谢。
●为了保证安全和正确使用本产品,使用之前请认真阅读本手册。
●请务必将其妥善保管,在必要的时候加以参考。
●请勿让儿童接触本产品。
●以下介绍对于安全操作非常重要,请务必严格遵守。
确保安全和正确使用手册使用约定确保安全和正确使用本产品可避免人员受伤和财产损失。
有关安全预防知识在本手册中归为3类进行描述,在阅读手册前确保对以下这些分类之间的差异进行全面的理解。
安全符号解释注意危险。
禁止执行操作。
必须执行操作。
这类预防信息被忽视,将可能给操作员带来严重的伤害。
这类预防信息被忽视,可能导致操作员受伤。
这类预防信息被忽视,可能导致操作员受伤或设备损坏。
兄弟 8S 刺绣机电脑操作说明书
I目录第一部分控制系统简介 (1)1.1系统概述 (1)1.2注意事项 (1)1.3工作环境 (2)1.4系统供电及接地 (2)1.5操作面板及按键功能简介 (2)1.5-1按键功能简介 (2)1.5-2 触摸按键图标说明 (3)1.5-3功能简介 (4)第二部分花版输入操作 (6)U盘花版输入到内存 (6)第三部分花版管理 (8)3.1选择花版刺绣 (8)3.1-1 照片绣 (9)3.2删除单个花版 (9)3.2输出花版到U盘 (9)第四部分刺绣花版 (10)4.1刺绣状态切换 (10)4.2准备状态 (11)4.2-1 设置花版参数 (11)4.2-2 切换绣框 (13)4.3工作状态 (14)4.3-1 花版原点(起绣点)设定 (14)4.3-2 摄像定位(仅限有此功能的机器) (15)4.3-3 偏移点(绣框中心最高点)设置 (16)4.3-4 返回原点(起绣点) (16)4.3-5 出入框操作 (16)4.3-6 返回停机点 (16)4.3-7 设置换色 (17)4.3-7-1 设置换色顺序 (17)4.3-7-2 贴布偏移、低速刺绣和替换针杆 (18)4.3-8 刺绣方式切换 (19)4.3-9 空走 (20)4.3-10 断电返回刺绣点操作 (20)4.4刺绣运转状态 (21)II4.5开始刺绣操作 (21)第五部分字母生成花版 (22)第六部分手动换色操作 (24)第七部分手动剪线 (25)第八部分绣框原点操作 (26)8.1手动设置绣框原点 (26)8.2自动寻找绣框绝对原点 (26)第十部分统计 (28)第十一部分主轴点动操作 (29)第十二部分语言切换 (30)第十三部分刺绣参数 (31)第十四部分设置机器参数 (32)第十五部分用户管理 (33)15.1时间设置 (33)15.2锁机解除 (34)第十六部分系统测试 (35)16.1输入测试 (35)16.2输出测试 (35)16.3轴测试 (36)16.4机头测试(仅在有机头板时使用) (36)第十七部分系统信息 (37)17.1系统编号和版本信息查看 (37)17.2L OGO升级 (37)17.3图库升级 (38)17.4系统升级 (38)III第十八部分网络设置 (39)第十九部分附录 (40)19.1参数表 (40)19.2系统报错及处理一览表 (42)IV第一部分控制系统简介1.1系统概述非常感谢您使用本公司的电脑刺绣机控制系统!本系统可以配合各种类型的刺绣机使用,满足您对绣花的不同要求,对薄料、厚料、立体刺绣都有令您满意的刺绣效果!先进的RAM+DSP双CPU控制技术,使系统速度更快,可进行多任务操作,在刺绣时可以进行文件传输等操作。
数码滚筒印花机关机操作流程
数码滚筒印花机关机操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!按照[数码滚筒印花机关机操作流程]为主题,以实际应用情况写一篇流程,回答要求步骤详细,回答字数不少于800字。
数码压痕机操作手册(中文最新版)

10 沈阳识达商贸办公用品 /
识达商贸分享
Save As Other Name Data Input Error Batch Can Not Be 0 Data Input Error QTY Can Not Be 0 Program Space Full Can Not Save Program Program Already Exists Can Not Save Program With This Name Password Error Please Input Again No Paper Or Paper Jam Check Paper Tray Or Remove Jam Paper Paper Jam Near Feed Roller Remove Jam Paper Paper Jam Near Exit Roller Remove Jam Paper E01 Press Motor Locked Door Open Close The Door Paper jam Double feed Clear jammed paper
显示信息 新建项目 重设计数器 计数器清零 删除项目 项目将被清除 错误:数据为 0 此行以下的数据将会清零 错误:数据值大于下行数据 值,此行以下的数据将会清零 数据错误 数据值必须大于前行数据值 最小 15mm 工作暂停 重设工作 项目已经更改 覆盖原有项目 项目已经存在
说明 选择 Yes,开始输入内容,选择 No 取消
在方框中输入新的项目名称,如 A01。点击箭头标志确认,项目名称将会在(3)的地方显示。 如果需要可以新建另外的新项目。 2.2 打开项目 点击 (8),选择需要调出的项目,将在(7)的位置显示项目的名称。如果需要修改压痕值 的设定,直接点击数值修改,此时项目名称的右上部有一个星号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9、电源采用 DC24V 电源供电;
10、具有 SD 升级程序和参数设置功能。
二、接线说明
所属端子 P2 P9
P10
端子标识 24V+(IN) 24V-(IN) 24V+(OUT) 左偏(IN) 24V-(OUT) 24V+(OUT) 右偏(IN) 24V-(OUT)
有效电平 无 无 无 0V 无 无 0V 无
★★★特殊主板电平与此不同时可联系本公司升级调整★★★
四、程序升级和参数修改
本控制板为了适应厂家的不同使用环境,可以通过 SD 更新程序和参数。控制板上三个控制按钮和 SD 卡卡槽,本卡槽接受 SD 卡文件系统格式 FAT 、FAT16、 FAT32,同时也支持 TF 卡通过卡槽转大卡使用。
按键
SD 卡卡座
///////////////////////////////////////////////////////////////////////////////////////////// 设置参数可以根据客户需求增加设置项 接受定制开发自动化设备整合方案,低成本、高可靠、差异化、提高复制门槛。
常州亚盾测控技术有限公司 联系电话:0519-68231819
信号线
0V
此信号有效时停止收布
0.3mm 以上
无 24V 负电源输出
电源线根据
0V
此信号有效时开始收布
负载不同作
信号有效时说明导带在转 相应更改 24V
动
预留(IN)
0V 未定义
信号有效时说明导带在转
5V 转动(IN) 5V
动(此端子只接受 5V 信号 高于 5V 的电压会造成硬件
不可逆的损坏)
24V-(OUT) 无 24V 负电源输出
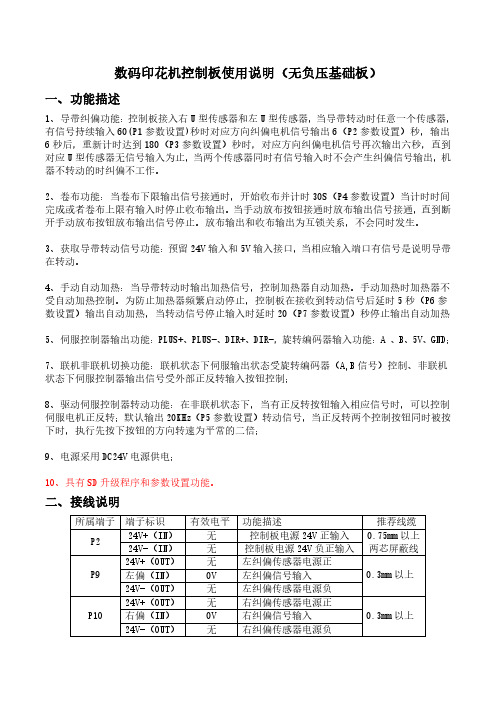
4、手动自动加热:当导带转动时输出加热信号,控制加热器自动加热。手动加热时加热器不 受自动加热控制。为防止加热器频繁启动停止,控制板在接收到转动信号后延时 5 秒(P6 参 数设置)输出自动加热,当转动信号停止输入时延时 20(P7 参数设置)秒停止输出自动加热
5、伺服控制器输出功能:PLUS+、PLUS-、DIR+、DIR-,旋转编码器输入功能:A 、B、5V、GND;
2、卷布功能:当卷布下限输出信号接通时,开始收布并计时 30S(P4 参数设置)当计时时间 完成或者卷布上限有输入时停止收布输出。当手动放布按钮接通时放布输出信号接通,直到断 开手动放布按钮放布输出信号停止。放布输出和收布输出为互锁关系,不会同时发生。
3、获取导带转动信号功能:预留 24V 输入和 5V 输入接口,当相应输入端口有信号是说明导带 在转动。
5V 接通时,控制板认为有相应信号输入;
端子标识:
IN 为输入端子,OUT 为输出端子;
★★5V 转动输入信号不得接高于 6V 电压,否则会造成控制板不可逆的硬件损坏★★
控制板外形和丝印图
三、安装说明
定位孔距离为 103*130mm,安装时保证控制板与箱体金属板至少 15mm 以上的距离,与控制板连结的导 线应尽量远离动力线。特别是旋转编码器线和伺服控制线,且尽量短。必要时可在导线上加磁环,增强系 统抗干扰性能。
24V-(OUT) 无 24V 负电源输出
纠偏 1(OUT) 0V 对应右纠偏信号输出
纠偏 2(OUT) 0V 对应左纠偏信号输出
由负载决定
P12 收布(OUT)
0V
接收布电机的收布控制
线经。单路
放布(OUT)
0V
接收布电机的放布控制
可以稳定驱
自动(OUT)
0V
导带转动自动加热输出
动 500mA 负
预留(OUT) 0V 未定义
载
24V-(OUT) 无 24V 负电源输出
GND1(IN)
无 和旋转编码器地相连
B(IN) P7
A(IN)
0/5V 和旋转编码器 B 相连 0/5V 和旋转编码器 A 相连
0.3mm 以上 屏蔽线
5V-1(OUT) 无 悬空
A+(OUT)
0/5V 接伺服控制器 PLUS+
/////////////////////////////////////////////////////////////////////////////////////////////// P1=5; 首次纠偏延时默认 60(S)0~600 P2=6; 纠偏电机转动时间默认 6(S) 0~600 P3=15; 非首次纠偏持续时间默认 180(S)0~1000 P4=10; 收布无上限信号停止时间默认 30(S)1~600 P5=25; 转动脉冲速度默认 20(KHz)5~50 P6=3; 转动后延时自动加热输出默认 5(S)1~600 P7=10; 转动停止延时停止自动加热默认 20(S)1~600
联机信号无输入时,输出伺 0V
服电机正向转动信号
放布(IN)
0V 信号输入时收布电机反转
信号有效时输出伺服电机
联机(IN)
0V 转动受输入的 AB 编码器控
制,不受正反转控制
反转(IN)
P11 上限(IN) 24-(OUT) 下限(IN) 24V 转动 (IN)
联机信号无输入时,输出伺
0V 服电机反向转动信号
S1 系统复位按钮、S3 为程序升级按钮、S2 为参数升级按钮。 升级过程先准备好 SD 卡在 SD 卡根目录放入 APP.hex(本公司提供)set.txt 两个文件,将带有数据的 SD 卡 插入控制板的 SD 卡座内,升级程序时保持 S3 按下,按一下 S1 让系统重启,此时 LED 指示灯 RUN 常亮, 松开 S3 按钮,系统进入程序升级过程等待数秒后,RUN 开始闪烁系统升级成功,如 RUN 继续保持常亮说明 系统升级失败。 升级参数时保持 S2 按下,按一下 S1 让系统重启,此时 LED 指示灯 RUN 常亮,松开 S2 按钮,系统进入 程序升级过程等待数秒后,RUN 开始闪烁系统升级成功,如 RUN 继续保持常亮说明系统升级失败。 设置参数的修改,将 SD 卡插入读卡器在电脑上打开 SD 卡根目录内 set.txt 文件,修改相应参数项对应 等号后面的值。注意不得超出设置范围,否则升级不成功参数恢复默认设置值。参数可以根据客户需求增 加或者修改,接口客户定制开发相应功能。
板可以检测信号输入。其他传感器应选择漏极 NPN 常开型,就是在信号有效时信号输出端应输出低电平,
且驱动电流大于 20mA。
控制板接开关输入
控制板接传感器输入
输入传感器选型 转动信号有两个输入口,24V 转动输入和 5V 转动输入,两个输入信号为逻辑或关系,任意一个输入信 号有效时控制板认为输入转动信号有效。当输入 24V 转动信号时只有当输入 24V 电压时认为信号有效,就 是当此端子电压为 24V+时主板认为转动信号有效,同理当 5V 转动端子为 5V 时控制板认为转动信号有效。
A-(OUT) P8
B+(Leabharlann UT)0/5V 接伺服控制器 PLUS0/5V 接伺服控制器 DIR+
0.3mm 以上 屏蔽线
B-(OUT)
0/5V 接伺服控制器 DIR-
有效点电平:
有效电平 0V,表示输入端子和 0V 接通时,控制板认为有相应信号输入;有效电平 24V
表示输入端子和 24V 接通时,控制板认为有相应信号输入;有效电平 5V 表示输入端子和
数码印花机控制板使用说明(无负压基础板)
一、功能描述
1、导带纠偏功能:控制板接入右 U 型传感器和左 U 型传感器,当导带转动时任意一个传感器, 有信号持续输入 60(P1 参数设置)秒时对应方向纠偏电机信号输出 6(P2 参数设置)秒,输出 6 秒后,重新计时达到 180(P3 参数设置)秒时,对应方向纠偏电机信号再次输出六秒,直到 对应 U 型传感器无信号输入为止,当两个传感器同时有信号输入时不会产生纠偏信号输出,机 器不转动的时纠偏不工作。
功能描述 控制板电源 24V 正输入 控制板电源 24V 负正输入
左纠偏传感器电源正 左纠偏信号输入 左纠偏传感器电源负 右纠偏传感器电源正 右纠偏信号输入 右纠偏传感器电源负
推荐线缆 0.75mm 以上 两芯屏蔽线 0.3mm 以上
0.3mm 以上
24V+(OUT) 无 24V 正电源输出
正转(IN)
7、联机非联机切换功能:联机状态下伺服输出状态受旋转编码器(A,B 信号)控制、非联机 状态下伺服控制器输出信号受外部正反转输入按钮控制;
8、驱动伺服控制器转动功能:在非联机状态下,当有正反转按钮输入相应信号时,可以控制 伺服电机正反转;默认输出 20KHz(P5 参数设置)转动信号,当正反转两个控制按钮同时被按 下时,执行先按下按钮的方向转速为平常的二倍;
按照端子图连结相应端子,控制板输出信号为开漏输出。在没有信号输出是输出端为高阻态,在有信
号时对地导通,工作原理如下图(控制板驱动 SSR 继电器,和电磁继电器典型接线图)
控制板驱动 SSR 固态继电器
控制板驱动 SSR 电磁继电器
输入信号接线时,除了 24V 转动、5V 转动信号外其他都为低电平有效,就是在输入信号为 24V-时控制