手表基于Proe的参数化设计及运动仿真.ppt
PROE运动仿真分析

PROE运动仿真分析PROE(Pro/ENGINEER)是由美国Parametric TechnologyCorporation(PTC)公司所开发的一套3D CAD软件系统。
它是一款功能强大的工程设计与制造软件,广泛应用于机械工程、汽车工程等领域。
在PROE中进行运动仿真分析可以帮助工程师们更好地了解和优化他们的设计方案。
运动仿真分析是一种通过模拟机械系统在给定条件下的运动来评估其性能和运行情况的方法。
通过对设备或产品的运动进行分析与仿真,可以预测其运动特性、动力学行为和相应的应力应变等情况。
这对于设计师来说非常重要,因为它可以在实际制造之前发现问题并进行相应的调整,从而节省时间和成本。
在PROE中进行运动仿真分析有几个基本步骤。
首先,我们需要创建一个装配模型,也就是包含了所有相关零部件的模型。
然后,我们需要为每个零件定义其运动关系和约束条件。
这些条件可以是固定的,也可以是变化的。
接下来,我们需要选择适当的运动学分析工具,例如正向动力学和逆向动力学。
运动学分析允许我们确定系统的运动规律和轨迹。
最后,我们需要对系统的受力和应力进行分析,以确定零件的强度和稳定性。
PROE中的运动仿真分析可以帮助工程师在设计过程中解决各种问题。
以下是一些典型的应用案例:1.碰撞检测:PROE可以模拟装配过程中各个零部件之间的碰撞情况。
这可以帮助设计师排除可能导致装配错误或故障的问题。
2.动力学分析:通过对装配模型进行运动仿真分析,可以确定各个零部件的运动规律和速度变化。
这对于设计运动机构和机械设备非常重要。
3.振动分析:PROE可以帮助评估系统的振动特性,包括自由振动频率和振幅。
这对于减少振动和噪音问题非常有用。
4.受力和应力分析:工程师可以使用PROE进行受力和应力分析,以确定系统中可能存在的弱点和潜在的破坏部位。
这对于优化设计方案和提高产品强度至关重要。
5.运动优化:PROE可以帮助工程师优化机械系统的运动性能,例如减少摩擦、优化速度和精度等。
PROE运动仿真教程共29页
PROE机构仿真之运动分析关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
运动分析的定义在满足伺服电动机轮廓和接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。
PROE运动仿真教程

P R O E运动仿真教程本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchPROE机构仿真之运动分析关键词:PROE仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体 (Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接 (Connections) - 定义并约束相对运动的主体之间的关系。
自由度 (Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动 (Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态 (Dynamics) - 研究机构在受力后的运动。
执行电动机 (Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接 (Gear Pair Connection) - 应用到两连接轴的速度约束。
基础 (Ground) - 不移动的主体。
其它主体相对于基础运动。
接头 (Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动 (Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接 (Loop Connection) - 添加到运动环中的最后一个连接。
运动 (Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束 (Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放 (Playback) - 记录并重放分析运行的结果。
伺服电动机 (Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
ProENGINEER中文野火版5.0高级应用教程(修订版)-ppt教案 第09章 运动仿真
图9.1.2 “编辑”下拉菜 单
图9.1.3 “插入”下拉菜单
执行machanica分析
机构分析 回放以前运动的分析 生成分析测量的结果
隐藏所有已保存的分析 删除当前分析
图9.1.4 “分析”下拉菜单
9.1.4 命令按钮介绍
在机构界面中,命令按钮区列出了下拉菜单中常 用的“机构”操作命令,如图9.1.5所示
第8章 ISDX曲面模块
本章先介绍Pro/ENGINEER的机构(Mechanism)模块的基 本知识和概念,例如各种连接(滑动杆、销钉等)的定义及特 点、主体、拖移、连接轴设置、伺服电动机等,然后介绍一个 实际的机构——瓶塞开启器运动仿真的创建过程。
9.1 概 述
9.1.1 术语 9.1.2 进入和退出机构模块
9.2.2 销钉(Pin)接头
销钉接头是最基本的连接类型,销钉接头的连接元件可 以绕轴线转动,但不能沿轴线平移。
销钉接头需要一个轴对齐约束,还需要一个平面配对 (对齐)约束或点对齐约束,以限制连接元件沿轴线的平移。
销钉接头提供一个旋转自由度,没有平移自由度。
这两条轴线对齐
连接元件
附着元件
这两个平面对齐
滑动杆接头如图9.2.7所示,在这种类型的接头中,连接 元件只能沿着轴线相对于附着元件移动。
滑动杆接头需要一个轴对齐约束,还需要一个平面配对 或对齐约束以限制连接元件转动。
滑动杆接头提供了一个平移自由度,没有旋转自由度。
这两条轴线对齐约束 连接元件
附着元件
这两个平面对齐约束
图9.2.7 滑动杆(Slider)接头
A
B
C
K
D
L
E
M
F
N
G
ProE 运动仿真ppt课件
④ 柱面
轴对齐
具有一个旋转自由度和一个沿轴向的平移自 由度,使用“轴对齐”的约束限制其他4个自由度。
⑤ 平面
具有两个平移自由度和一个旋转自由度,使 用“平面”约束限制其他3个自由度。
7
三、建立运动模型
1. 运动连接
⑥球 具有3个旋转自由度,使用“点对齐”约束来限制3个平移自由度。
⑦ 焊接 6个自由度被完全限制,使用“坐标系(重合)”约束所有自由度。
36
七、综合演练
行星齿轮机构运动 附件10、11、12
G
1080 deg/s
80 30
挖掘机摇臂受力分析
物理模型求解
37
5
三、建立运动模型
1. 运动连接
① 刚性 6个自由度被完全限制。
② 销钉 仅有一个旋转自由度,使用“轴对齐”和 “平移”两个约束来限制其他5个自由度 。
③ 滑动杆 仅有一个沿轴向的平移自由度,使用“轴对 齐”和“旋转”两个约束限制其他5个自由度。
轴对齐 平移
旋转
轴对齐
6
三、建立运动模型
1. 运动连接
直接点击按钮 或点击下拉式菜单“Mechanism”→伺服电动机→新建,进行伺服电机的创建。
连接轴设置
图 形 显 示
13
6. 实例演练三、建立源自动模型牛头刨床主运动机构 附件1,2
插齿机主运动机构 14
四、运动副
1. 凸轮
直接点击按钮 或下拉式菜单“Mechanism”→ 凸轮, 可从弹出的对话框中对凸轮机构进行新建、编辑、删除 的操作,大部分Mechainsm所创建的对象都使用此种方 式予以管理)。
⑧ 轴承
点对齐
具有3个旋转自由度和一个平移自由
基于ProE手表造型设计
基于Pro/E手表造型设计1Pro/E软件简介Pro/Engineer 是美国PTC公司的产品,于1988年问世。
10多年来,经历20余次的改版,已成为全世界及中国地区最普及的3D CAD/CAM系统的标准软件,广泛应用于电子、机械、模具、工业设计、汽车、航天、家电、玩具等行业。
Pro/E是全方位的3D产品开发软件包,和相关软件Pro/DESINGER(造型设计)、Pro/MECHANICA (功能仿真),集合了零件设计、产品装配、模具开发、加工制造、钣金件设计、铸造件设计、工业设计、逆向工程、自动测量、机构分析、有限元分析、产品数据库管理等功能,从而使用户缩短了产品开发的时间并简化了开发的流程;国际上有27000多企业采用了PRO/ENGINEER软件系统,作为企业的标准软件进行产品设计。
Pro/E独树一帜的软件功能直接影响了我们工作中的设计、制造方法。
与其他同类三维软件(MDT、UG、CATIA等)相比,Proe/ENGINEER的不同之处在于以下几点:(1)基于特征的(Feature-Based)Pro/ENGINEER是一个基于特征的(Feature-Based)实体模型建模工具,利用每次个别建构区块的方式构建模型。
设计者根据每个加工过程,在模型上构建一个单独特征。
特征是最小的建构区块,若以简单的特征建构模型,在修改模型时,更有弹性。
(2)关联的(Associative)通过创建零件、装配、绘图等方式,可利用Proe/ENGINEER验证模型。
由于各功能模块之间是相互关联的,如果改变装配中的某一零件,系统将会自动地在该装配中的其他零件与绘图上反映该变化。
(3)参数化(Parametric)Pro/ENGINEER 为一参数化系统,即特征之间存在相互关系,使得某一特征的修改会同时牵动其他特征的变更,以满足设计者的要求。
如果某一特征参考到其他特征时,特征之间即产生父/子(parent/child)关系。
Pro/E软件与机构运动的仿真

Pro/E软件与机构运动的仿真摘要:本文讨论了机械原理(机械基础)教学中机构运动仿真视频的作用及其优势,着重对用Pro/E软件制作机构运动的多媒体仿真视频进行了探讨。
关键词:Pro/E;机构运动;多媒体仿真一.前言随着多媒体技术的确发展,其应用已遍及社会生活的各个角落,正在对人们的工作方式、生活方式带来巨大的变革。
同样,多媒体技术对教学也产生了积极的效应,能为学生提供最理想的教学环境。
由于多媒体具有图、文、声并茂及活动影象的特点,具有许多宝贵的特性与功能。
主要表现为;直观性,能突破视觉的限制,多角度地观察对象,并能够突出要点;图文声像并茂,多角度调动学生的情绪、注意力和兴趣。
动态性,动态反映机构运动的全过程,有效地突破了传统教学难点;通过多媒体对真实情景的模拟,培养学生的探索、创造能力;传统的机构运动教学多半是用挂图进行讲述,既没有立体感,也没有动态感,没有接触过机械的学生很难想象出机构运动的情形,如果在多媒体教学环境中,通过动画、图形、声音的演示,加上教师深入浅出的讲解,学生会在不知不觉中学到知识。
这样学生就能够在原有认知结构和生活经验的基础上,认同我们的概念和思维方式,并强化到自己新的认知结构中,形成自己新的概念和思维方式。
Pro/E软件平台能直接仿真机构各零件的造型与装配,可进行机构运动的仿真,甚至可以仿真一台机器的运行。
对机构的运动进行多角度、多方位的观查,还可进行透视和剖视情况观查。
并能将运动的画面生成视频文件,供离开Pro/E 软件平台时进行演示。
二.Pro/E简介Pro/E全称是“Pro ENGINEER”由美国PTC(参数)公司开发的一款三维软件。
Pro/E软件具有操作容易、使用方便、修改方便的特点。
因此在机械三维实体造型设计中得到了广泛的应用。
具有很强的实体造型、虚拟装配和仿真运行能力。
功能界面清楚明确,让使用者视觉和心理都有一种轻松感。
目前已经成为机械设计、家电设计、模具设计等行业所普遍采用的三维软件。
PROE运动仿真分析

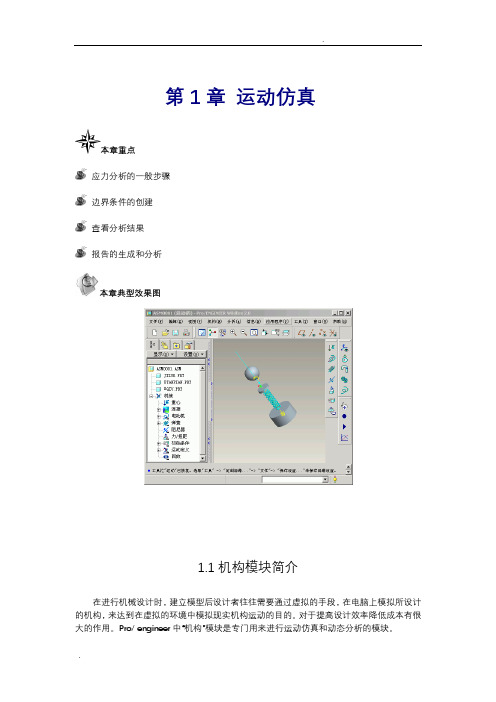
P R O E运动仿真分析 The manuscript was revised on the evening of 2021第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查看分析结果报告的生成和分析本章典型效果图机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。
PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线和运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。
PROE运动仿真分析

第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查瞧分析结果报告的生成与分析本章典型效果图1、1机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer中“机构”模块就是专门用来进行运动仿真与动态分析的模块。
PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)与Mechanism dynamics(机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线与运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力与力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力与力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1、2总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
proe运动仿真

应用程序---机构机构模型树我们可以右键新建放置里面的平移就是配合四连杆机构的最后一个空的链接在第三个孔销钉链接放置—下面的新设置里面定义如果不小心选择了一个平面,右键溢出,,或者在放置里面移除其在应用程序---机构--链接建立一个齿轮副标准齿轮和齿轮齿条齿条运动时可以方向的,调节与实际情况相同。
当前值那个地方输完以后记得俺回车键。
通过拖动对原件进行运动验证。
可以输入齿轮的分度圆直径(节圆)同样可以在属性里面进行用户自定义对两个齿轮的齿数比进行输入。
球连接放置里面没有其他的限制轴承连接点对齐是点和轴的连接。
放置里面有一个平移轴的限制焊接的坐标系可以修改方向打开元件对坐标系进行编辑定义定向里对坐标进行反向(自己新建两个坐标系)方正是参数化的东西。
刚性连接自己选取把他完全约束就好。
常规连接就是什么都不限制通过自己的装配达到想要的效果。
这些里面也是可以创建一条基准轴的。
在装配的里面要创建固定的基准轴要选择ASM 的平面。
凸轮选择曲面的时候要按ctrl建进行多选想要取消也可以按住ctrl键进行反选进行取消。
当勾上自动选取的时候只要选一个曲面就会自动的全部选择凸轮的面。
属性里面的启用升离勾上后实体之间不能穿插穿过,以他们的曲面为界线。
不启用两个只能贴在界面上面不能上下动的。
启用升离下面的e 是弹性系数,反弹为原来高度的20 %就是0.2。
启用升离以后才能够选择启用摩擦主体拖动只能够进行平移的拖动,不能够旋转当前快照就是拍下当前的一个状态双击快照可显示也可以单击点右键约束里面可以进行一些约束约束用完后删除再快照就是我们想要的位置了。
定向的约束也可以定向角度什么的。
Y (运动轴约束)约束可以使链接不能动(但是连接还是存在的)。
主体锁定也不能够动了。
启用/禁用连接可以是连接不存在或者恢复。
在机构环境之中选择齿轮副连接,还有其他的连接。
(两个齿轮实体不能有明显的干涉)。
已经看完第二课。
proe机械运动仿真

proe机械运动仿真Pro/Engineer(ProE)是一种先进的计算机辅助设计(CAD)软件,可以进行机械运动仿真,提供了一种方便的方式来模拟机械系统的动态行为,以预测其行为和性能。
本文将介绍ProE机械运动仿真的基本原理及步骤,以及运动仿真在机械设计中的应用。
一、ProE机械运动仿真的基本原理和步骤机械运动仿真(Motion Simulation)是计算机辅助工程(CAE)的一种重要分支,主要用于仿真机械系统运动学和动力学行为以及实验研究的虚拟环境中。
ProE机械运动仿真可以帮助工程师模拟和优化机械系统的动态行为,以便更好地了解和改进产品性能,并节省设计时间和成本。
1. ProE机械运动仿真的基本原理ProE机械运动仿真基于三维计算机模型,具体步骤如下:(1)建立三维模型首先,需要使用ProE的塑性建模工具来创建机械部件的三维模型。
(2)定义约束在模型中,需要对各个部件进行约束,以模拟真实机械部件的连接和约束关系。
例如,可以使用ProE的运动关系约束(Motion Constraint)对两个部件进行连接,或使用轴向约束(Axial Constraint)将部件约束到固定轴上。
(3)定义动力学行为在模型中,需要定义机械系统的动力学行为,即受到的各种力和扭矩的作用。
(4)运行仿真分析在构建模型和定义运动学和动力学特性后,可以运行仿真分析来模拟系统的动态行为。
ProE提供了一套强大的仿真分析工具,可以帮助用户准确地预测机械系统的行为和性能。
2. ProE机械运动仿真的步骤ProE的机械运动仿真主要包括以下步骤:(1)建立三维模型使用ProE的建模工具创建机械系统的三维模型,并定义其结构和组成部分。
这包括机械部件的几何形状和运动特性。
(2)定义运动关系和约束ProE提供了多种约束类型,可用于定义机械部件之间的约束关系。
例如,可以使用运动关系约束将两个部件连接在一起,并定义它们之间的运动范围。
(3)定义动力学行为在模型中添加力、重力、摩擦等动力学特性,并定义它们的大小和方向。
PROE运动仿真分析
第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查看分析结果报告的生成和分析本章典型效果图1.1机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。
PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线和运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1.2总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
手表基于Proe的参数化设计及运动仿真课件PPT教学
建立模型及参数化设计
4、齿轮模型图
第15页/共26页
建立模型及参数化设计
二、手表部分结构外观模型
表壳
第16页/共26页
表盘
建立模型及参数化设计
表带
第17页/共26页
装配及运动传真设计 一、总装配图
第18页/共26页
装配及运动传真设计
手表装配外观
第19页/共26页
装配及运动传真设计 二、传动机构装配图
第24页/共26页
谢谢观赏
第25页/共26页
谢谢观看!
第26页/共26页
第8页/共26页
传动方案设计及计算
第9页/共26页
传动方案设计及计算
各指针转动速度对比
秒针
分针
时针
60秒转一圈 角速度是
360/ 60s
3600秒转一 圈
角速度是
6 / 60s
43200秒转 一圈
角速度是
0.5 / 60s
第10页/共26页
传动方案设计及计算
齿轮 1 2 3 4 5
各齿轮相关参数对照表
Z
M
D
Df
B
使用次数
17
1.7mm 1.45mm
6
51
5.1mm 4.85mm
2
68 0.1mm 6.8mm 6.55mm 1mm
1
102
10.2mm 9.95mm
2
170
17mm 16.75mm
1
第11页/共26页
传动方案设计及计算
三、中心距计算
a m(z1 z2 )
由于在计算分配传动比时不能保级上一级传动与一下级传动比相同,因此 中心距肯定不相等。考虑到这一因素,所以在每一级传动中加一个惰性齿轮,从 而以保证秒针与分针同轴。同理,以下各级运算按照这种方法来计算。最终确定 传动方案。这样就可以满足大三针手表的设计要求。
proe-教程运动仿真

第1章运动仿真本章重点应力分析的一般步骤边界条件的创建查看分析结果报告的生成和分析本章典型效果图1.1 机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Pro/ engineer 中“机构”模块是专门用来进行运动仿真和动态分析的模块。
PROE 的运动仿真与动态分析功能集成在“机构”模块中,包括 Mechanism design (机械设计) 和 Mechanism dynamics (机械动态)两个方面的分析功能。
使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。
并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。
也可创建轨迹曲线和运动包络,用物理方法描述运动。
使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。
可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。
如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。
1.2 总体界面及使用环境在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序” → “机构”,如图1-1 所示。
系统进入机构模块环境,呈现图 1-2 所示的机构模块主界面:菜单栏增加如图 1-3 所示的“机构”下拉菜单,模型树增加了如图 1-4 所示“机构”一项内容,窗口右边出现如图 1-5 所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
proe机构运动仿真教程

proe机构运动仿真教程Pro/E是一款专业的三维参数化设计软件,具备强大的建模、绘图和分析功能,同时也支持运动仿真。
Pro/E机构运动仿真可以帮助设计师在设计机构时预测机构在运动过程中的动态行为和工作状态,从而提高设计的准确性和效率。
本教程将介绍Pro/E机构运动仿真的基础知识和操作步骤。
一、机构运动仿真概述机构运动仿真是指通过计算机模拟机构在不同工作状态下的动态行为和运动学、动力学特性,以评估机构的工作效率、可靠性和稳定性等。
机构运动仿真可以帮助设计师预测机构在实际工作中的行为,包括运动范围、速度、加速度和力等指标。
与传统的试制方法相比,机构运动仿真可以极大地降低试制成本和时间,同时也提高了设计的准确性和效率。
二、机构运动仿真的基础知识1. 机构机构是由两个或多个刚体通过连杆、齿轮、曲柄等连接构成的机械系统。
机构的功能是将输入运动和输出运动分离,从而实现不同类型的运动转换。
机构的类型根据连接的刚体个数可分为二级机构和三级机构;根据传递运动的方式可分为平面机构和空间机构;根据传递运动的数量可分为单自由度机构和多自由度机构。
2. 运动学和动力学运动学是研究机构运动的几何学原理,包括机构末端轨迹、速度、加速度和角度等指标;而动力学是研究机构运动的动力学原理,包括机构的力学特性、动力特性和能量特性等。
机构运动仿真需要同时考虑机构的运动学和动力学特性,并进行分析和仿真。
3. 运动学链运动学链是指连接机构各个部件的连杆、齿轮和副件等构成的运动链路。
运动学链的结构会影响机构的运动学性能,因此在机构运动仿真前需要建立运动学链模型,并确定各个部件之间的关系和运动学指标等。
三、机构运动仿真的操作步骤机构运动仿真需要按照以下基本步骤进行:1. 建立模型并确定机构类型在Pro/E中打开新的机构模型,并根据实际需求从零开始建立机构模型。
确定机构类型,包括二级机构或三级机构、平面机构或空间机构、单自由度机构或多自由度机构等。
基于ProE的手表造型研究设计与运动仿真
论文题目:基于Pro/E的手表造型设计及动态仿真学生姓名: 赵易科所在院系:机电学院所学专业:机械工程导师姓名:吴涛完成时间:2010年6月20日摘要本文主要是在Pro/E软件设计平台上完成新型手表的三维造型设计。
在整个设计的过程中,主要对手表的各个零部件进行造型设计和色彩渲染,最后对各个零部件进行虚拟装配、动态仿真、全局干涉检查。
通过对新型手表的系统设计,肯定了Pro/E软件在造型设计、基本特征创建、组件虚拟装配、动态仿真、色彩渲染等方面的优势,从而使设计工作直观化、高效化、精确化。
并充分证明了Pro/E软件在新产品的研究和开发中具有很重要的意义。
关键字:Pro/E,三维造型设计,虚拟装配,动态仿真Based on Pro/E of the watch design and dynamic simulationAbstractThe new watch of three-dimensional design was completed,used the software of Pro/E in this paper. In the process of three-dimensional design,mainly completed the design and color rendering of watch parts and components. Finally,completed the virtual assembly,Dynamic simulation,the overall interference checking of various parts and components. Through the system design of new watches,affirmed the advantages of Pro/E software in design,the creation of the basic characteristics,components,virtual assembly,dynamic simulation,color rendering,so that the design of visualization,efficient,and precision. And it was proved that Pro/E software has great importance in research and development of new products..Keywords:Pro/E,three-dimensional design,virtual assembly,dynamic simulation1目录1 绪论 (4)1.1 产品概述 (4)1.2 三维设计软件在产品造型设计方面的应用 (4)2 产品设计过程 (5)2.1 创建大表盘 (5)2.2 创建小表盘 (8)2.3 创建表壳基体 (10)2.4 创建时针 (18)2.5 创建分针 (19)2.6 创建秒针 (19)2.7 创建小表盘时针、分针 (20)2.8 创建玻璃表盖 (20)2.9 创建旋钮 (21)2.10 创建表链 (22)22.11 创建连接轴 (23)2.12 创建细节 (24)3 产品的虚拟装配 (24)3.1 产品虚拟装配设计 (24)3.2 装配爆炸图 (25)3.3 干涉检查 (26)4 动态仿真与动画录制 (26)5 结束语 (27)致谢 (27)参考文献 (28)31 绪论科学技术的迅猛发展,以前所未有的速度冲击和改变着我们的生活水平和生产方式。