弹性力学-本构关系ppt课件
合集下载
弹性力学_第四章 本构关系ppt课件

(3) 正交各向异性线弹性体 :
9
11 c11 c12 c13 0 0 0 11
22
c22 c23 0
0
0
22
1323
对
c33 0 0 c44 0
0 0
1323
23
31
称
c55
0
23
c66 31
e3
e’1
c
例:正交晶体(各种增强纤维复合材料、 木材等)
61 x
62 y
63 z 最新课6件4 xy
65 yzChapte6r65.1zx 27
§4-2 广义胡克定律
其中 c 1 1 C 1 1 ,c 1 2 C 1 1 2 2 ,c 1 4 C 1 1 1 2 ,c 5 6 C 2 3 3 1 …
即c 的下角标1、2、3、4、5、6分别对应于C 的双指 标11、22、33、12、23、31。应该指出,改写后的 cmn (m, n=1~6) 并不是张量。
Cijkl Cjikl
Chapter 5.1 26
§4-2 广义胡克定律
Cijkl Cjikl Cijlk 独立的弹性常数由81个降为36个
x c11 x c12 y c13 z c14 xy c15 yz c16 zx
y c21 x c22 y c23 z c24 xy c25 yz c26 zx
最新课件
35
§4-3 应变能和应变余能
应变能
如果载荷施加得足够慢,物体的动能以及因弹性变 形引起的热效应可以忽略不计,则外力所做的功将 全部转化为变形位能而储存在弹性体内。
弹性变形是一个没有能量耗散的可逆过程,卸载后
物体恢复到未变形前的初始状态,变形位能将全部
第11章-弹塑性力学--本构关系
xy c41 x c42 y c43 z c44 xy c45 yz c46 zx yz c51 x c52 y c53 z c54 xy c55 yz c56 zx zx c61 x c62 y c63 z c64 xy c65 yz c66 zx
xy c41 x c42 y c43 z
y y
图4-2
(a)
z
x
x
z
现在引进坐标系 Ox’y’z’, 原坐 标系 Oxyz 绕 y 轴转动 1800 后可与之重合 (图4-2)
新旧坐标轴间的方向余弦
l11 l33 cos180
1 0 0 1 l22 cos 0 1 0 0 l21 l31 l12 l32 l13 l23 cos 90 0
(11-13)
平面应力问题 用应变分量表示 应力分量
E y x 1 2 x E (11-14) y y x 1 2 G
ij ije 2 ij
(11-3’)
以上证明了各向同性的均匀弹性体的弹性常数只有 两个。
现在考虑一种物体各边平行于坐标轴的特殊情况,并 由此导出工程上常用的弹性常数和广义胡克定律。当物 体边界法线方向与 z 轴重合的两对边上有均匀的σz 作 用,其他边均为自由边时,则由材料力学知道
第11章 本构关系
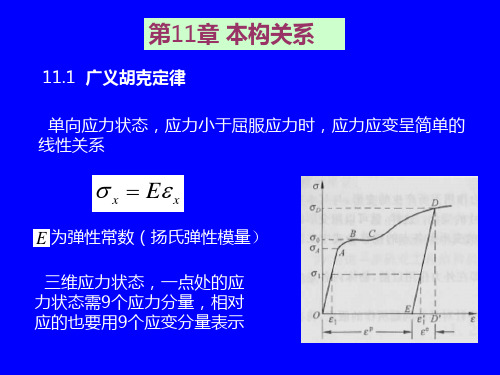
11.1 广义胡克定律 单向应力状态,应力小于屈服应力时,应力应变呈简单的 线性关系
x E x
E 为弹性常数(扬氏弹性模量)
三维应力状态,一点处的应 力状态需9个应力分量,相对 应的也要用9个应变分量表示
xy c41 x c42 y c43 z
y y
图4-2
(a)
z
x
x
z
现在引进坐标系 Ox’y’z’, 原坐 标系 Oxyz 绕 y 轴转动 1800 后可与之重合 (图4-2)
新旧坐标轴间的方向余弦
l11 l33 cos180
1 0 0 1 l22 cos 0 1 0 0 l21 l31 l12 l32 l13 l23 cos 90 0
(11-13)
平面应力问题 用应变分量表示 应力分量
E y x 1 2 x E (11-14) y y x 1 2 G
ij ije 2 ij
(11-3’)
以上证明了各向同性的均匀弹性体的弹性常数只有 两个。
现在考虑一种物体各边平行于坐标轴的特殊情况,并 由此导出工程上常用的弹性常数和广义胡克定律。当物 体边界法线方向与 z 轴重合的两对边上有均匀的σz 作 用,其他边均为自由边时,则由材料力学知道
第11章 本构关系
11.1 广义胡克定律 单向应力状态,应力小于屈服应力时,应力应变呈简单的 线性关系
x E x
E 为弹性常数(扬氏弹性模量)
三维应力状态,一点处的应 力状态需9个应力分量,相对 应的也要用9个应变分量表示
弹性力学_第四章 本构关系

y ν x
其中 是弹性常数,称为泊松比。
Chapter 5.1
§4-1 本构关系概念
线弹性叠加原理
先考虑在各正应力作用
z
z
x
下沿 x 轴的相对伸长,它
由三部分组成,即
y
o
y
z
Chapter 5.1
y
x x x x
x
x
§4-1 本构关系概念
§4-2 广义胡克定律
其中
c11 C11 , c12 C1122 , c14 C1112 , c56 C2331…
即c 的下角标1、2、3、4、5、6分别对应于C 的双指
标11、22、33、12、23、31。应该指出,改写后的
cmn (m, n=1~6) 并不是张量。 由于存在Voigt对称性,所以对于最一般的各向异性 材料,独立的弹性常数共有21个。
弹性张量,共有81个分量。
• 弹性张量的Voigt对称性
Cijkl C jikl Cijlk Cklij
Chapter 5.1
§4-2 广义胡克定律
ij ji
Cijkl kl C jikl kl kl
Cijkl C jikl
kl lk
Cijkl kl Cijlk lk Cijlk kl kl
x x x x
是由于x的作用所产生的相对伸长 其中 x
x
x
E
ν 是由于y的作用所产生的相对缩短 x x E
ν 是由于z的作用所产生的相对缩短 x x
y
z
E
Chapter 5.1
§4-1 本构关系概念
弹性力学-本构关系

c12 = c21 ⋯⋯ c56 = c65
∴
σ x c11 c12 σ c22 y σ z = τ xy 对 τ yz τ zx
c13 c23 c33
称
c14 c24 c34 c44
c15 c25 c35 c45 c55
弹性对称
弹性 有 个对 向, 称 向, 对称 向上弹性 性 , 力 关系 。 称为弹性对称 弹性对称。 称为弹性对称。
弹性
弹性对称
向
相应的对称方向和对称面称为弹性对称方向 弹性对称面。 弹性对称方向和 相应的对称方向和对称面称为弹性对称方向和弹性对称面。 垂直于弹性对称面的方向称为弹性主轴 弹性主轴。 垂直于弹性对称面的方向称为弹性主轴。
第四章 本构关系
物体的弹性性质和广义 广义胡克定律 §4-1 物体的弹性性质 广义 §4-2 线弹性材料的本构关系 各向同性线弹性材料的物理方程 §4-3 各向同性线弹性材料的物理方程
物体的弹性性质 广义Hooke定律 弹性性质·广义 §4-1 物体的弹性性质 广义 定律
一. 弹性的概念
一般情况下,物体的应力与应变呈某一函数关系,可表示为: 一般情况下,物体的应力与应变呈某一函数关系,可表示为: σ ij = f ( ε ij ) 应力与应变张量均为六个独立分量。 应力与应变张量均为六个独立分量。则 σ x = f1 ( ε x , ε y , ε z , γ xy , γ yz , γ zx )
一. 横观各向异性材料
仅具有一个弹性对称面的材料称为横观各向异性材料。 横观各向异性材料 仅具有一个弹性对称面的材料称为横观各向异性材料。 平面为材料的弹性对称面, 轴为弹性主轴。 设Oxy平面为材料的弹性对称面,z轴为弹性主轴。 平面为材料的弹性对称面 轴为弹性主轴 体内一点P(x, y, z)的应力和应变 体内一点 的应力和应变 为{σ } 和{ε }。则 则 {σ } = [C ]{ε } 其中[C]为各向异性的弹性矩阵 其中 为各向异性的弹性矩阵 现将z轴反向, 现将 轴反向,考 轴反向 察其本构关系
弹性力学-第四章-本构关系

∵
E 0; G 0; K 0
G= E 2(1 + ν)
K
2 3
G
E
31 2
故要上式成立必要求:
1 0; 1 2 0
即 1 0.5
Chapter 5.1
§4-1 本构关系概念
1 0.5
若设=0.5,则体积模量K=,称为不可压缩材料,
∵ ij
1
E
ij
E
kkij
;
1 2
E
∴
ij
E
1
ij
1
ij
2G ij
E
1 1
2
ij
令
1
E
1
2
则 ij 2Gij kkij Chapter 5.1
§4-1 本构关系概念
而不引起 xz、yz,于是可得
xy
xy
G
同理
yz
yz
G
zx
zx
G
Chapter 5.1
§4-1 本构关系概念
于是,得到各向同性材料的应变-应力关系:
x
1 E
x
ν
y z
y
1 E
y
ν x
z
z
弹性关系的常规形式为
x 2G x ; xy G xy y 2G y ; yz G yz x 2G z ; zx G zx
其中 G 和 称为拉梅常数。
弹性力学 第四章 本构关系

0 0 0 0
0 0 0 0
σ zz σ xx σ yy σ xy
= ν xσ xx +ν y σ zz
Ey Ez
σ zz
2)各向同性平面应变本构关系
E2 = E3 = E , ν2 = ν3 = ν , G3 = G,
0 1 / E −ν / E −ν / E 0 ε 1 / E −ν / E 0 22 = ε 33 1/ E 0 1 / 2G ε 23 sys. σ 11 σ 22 σ 33 σ 23
5个独立的材料常数:E2 ,ν 2 , E3 ,ν 3 , G3 −( σ ε11 = 22 + E2
ν2
ν3
E3
σ 33 )
σ 22 σ 33 σ 23
ε 22 1/ E2 −ν 3 / E3 0 ε = 1/ E3 0 33 ε 23 sym. 1/ 2G3 σ 22 σ = 33 σ 23
E2 / m E2ν 3 / m 0 sym. E3 / m 0 , m = 1 − E2ν 32 / E3 G3
2 → x,
y (3) 3 → y, 1→ z
εzz =−(
εxx εyy ε xy σxx σ yy σ xy
νx
Ex
σxx +
νy
Ey
5个独立的材料常数: Ex ,ν x , E y ,ν y , G y
σ yy )
0 0 1 / 2 Gy
x(2)
1 / Ex = .. sym
− ν y / Ey 1 / Ey
弹性力学 第四章 弹性本构关系
123 1’ 1 0 0 2’ 0 1 0 3’ 0 0 -1
ei 'j ' = νi 'kν e j'l kl
0
x1 x1' x3'
x2 x2'
图 4.1
可得
σ i' j ' = ν i'kν j 'lσ kl
e1' = e1,e2' = e2,e3' = e3,e4' = −e4,e5' = −e5,e6' = e6
第四章 弹性本构关系(Hooke 定律)
Robert Hooke 1676 年提出字谜 “ ceiiinosssttuv ”,1678 年他公布了结果为 “Ut tensio sic vis”——有多大的伸长就有多大的力,换句话说就是变形与力成正比。在小变形的情况下他 建立了应力与应变之间的关系,反映了材料弹性性质的规律,后人在其基础上发展、完善了 并被称为广义 Hooke 定律的规律,这是本章讨论的中心内容。
39
第四章 弹 性 本 构 关 系
①正应力σ1,σ 2,σ 3 不会引起与x3 轴方向有关的剪应变。从(4.1.2b)式可见,与x3 轴
有关的剪应变是 e4 和 e5 ,正应力若对其没影响,只有 C14 = C15 = C24 = C25= C34 = C35 = 0。
②对称面中的剪应力σ 6 不会引起与x3 轴方向有关的剪应变,同样从 (4.1.2b) 式可见,
(2) Cijkl 不全独立
由于 ① ekl = elk ,故有Cijkl = Cijlk ,弹性常数从 81 个减去 27 个相同的常数,应有 54 个;
②σ ij = σ ji ,故有Cijkl = C jikl ,弹性常数由 54 个减去 18 个新的相同常数,应有 36 个;
弹性力学-本构关系
弹性矩阵为
对称矩阵,共有 21个独立的弹性 常数
广义胡克定律的上述形式表征的是各向异性材料的本构关系。
如果材料具有弹性对称面, 则本构关系还可简化,使弹性常 数进一步缩减。
弹性对称
弹性主轴 弹 性 对 称 方 向
弹性体中每一点均有一个对
称方向,在这些对称方向上弹性
性质相同,即应力应变关系不变。
称为弹性对称。
c22
c23
c24
c25
c26
yLeabharlann xzy
对
c33
c34 c44
c35 c45
c36 c46
xzy
yz
zx
称
c55
c56
yz
c66 zx
x f 1 x , y , z , x y , y z , z x y f 2 x , y , z , x y , y z , z x z f 3 x , y , z , x y , y z , z x x y f 4 x , y , z , x y , y z , z x y z f 5 x , y , z , x y , y z , z x z x f 6 x , y , z , x y , y z , z x 如果材料 ij f ij 呈单值连续关系(不一定线性),则
弹性主轴
弹性对称方向
相应的对称方向和对称面称为弹性对称方向和弹性对称面。 垂直于弹性对称面的方向称为弹性主轴。
弹性力学第四章本构关系

由于应力应变都是二阶张量,且上式对任意的kl
均成立,所以根据商判则Cijkl是一个四阶张量,称 弹性张量,共有81个分量。 • 弹性张量的Voigt对称性
C ijkl C jikl C ijlkC klij
Chapter 5.1
§4-2 广义胡克定律
ij ji
Cijkl kl Cjikl kl kl
的范围内。
Chapter 5.1
第四章 本构关系
§4-1 本构关系概念 §4-2 广义胡克定律 §4-3 应变能和应变余能
§4-2 广义胡克定律
各向同性本构关系
ij 2Gij kkij
1Eij 1E12kkij
对于各向同性材料,正应力在对应方向上只引
起正应变,剪应力在对应方向上只引起剪应变,
它们是互不耦合的。
§4-1 本构关系概念
∵
E0 ; G 0 ; K 0
G= E 2(1 + ν)
K23G31E2
故要上式成立必要求:
10; 12 0
即 10.5
Chapter 5.1
§4-1 本构关系概念
10.5
若设=0.5,则体积模量K=,称为不可压缩材料,
相应的剪切模量为
GE 3
对实际工程材料的测定值,一般都在 00.5
Chapter 5.1
§4-1 本构关系概念0K ij 2G ij第一式说明弹性体的体积变化是由平均应力0引起
的,相应的弹性常数K称为体积模量。(体积变化)
第二式说明弹性体的形状畸变 ij 是由应力偏量 ij
引起的,相应的弹性常数是剪切模量G的二倍。(形状
变化)
Chapter 5.1
§4-1 本构关系概念
y νx
均成立,所以根据商判则Cijkl是一个四阶张量,称 弹性张量,共有81个分量。 • 弹性张量的Voigt对称性
C ijkl C jikl C ijlkC klij
Chapter 5.1
§4-2 广义胡克定律
ij ji
Cijkl kl Cjikl kl kl
的范围内。
Chapter 5.1
第四章 本构关系
§4-1 本构关系概念 §4-2 广义胡克定律 §4-3 应变能和应变余能
§4-2 广义胡克定律
各向同性本构关系
ij 2Gij kkij
1Eij 1E12kkij
对于各向同性材料,正应力在对应方向上只引
起正应变,剪应力在对应方向上只引起剪应变,
它们是互不耦合的。
§4-1 本构关系概念
∵
E0 ; G 0 ; K 0
G= E 2(1 + ν)
K23G31E2
故要上式成立必要求:
10; 12 0
即 10.5
Chapter 5.1
§4-1 本构关系概念
10.5
若设=0.5,则体积模量K=,称为不可压缩材料,
相应的剪切模量为
GE 3
对实际工程材料的测定值,一般都在 00.5
Chapter 5.1
§4-1 本构关系概念0K ij 2G ij第一式说明弹性体的体积变化是由平均应力0引起
的,相应的弹性常数K称为体积模量。(体积变化)
第二式说明弹性体的形状畸变 ij 是由应力偏量 ij
引起的,相应的弹性常数是剪切模量G的二倍。(形状
变化)
Chapter 5.1
§4-1 本构关系概念
y νx
第四章 弹性变形、塑性变形、本构方程ppt课件

式中Cmn称为弹性常数,与位置坐标无关。
弹塑性力学
z c31 x c32 y c33 z c34 xy c35 yz c36 zx
§4-3 弹性本构方程、弹性应变能函数(续2)
◆ 广义虎克定律张量表达式:
c
无关? 系是什么?
ij ijkl kl
§4-3 弹性本构方程、弹性应变能函数(续6)
(4—12)
(4—13)
则弹性体由零应变状态加载至某一应变状态 ij 的过程中, 弹性体整个体积的内力功为:
A
A U d V U d V U (4—13) U d 0 ij ij
ij ij
弹塑性力学
§4-1 弹性变形与塑性变形的特点、塑性力学的附加假设(续5)
⑷ 塑性力学附加假设:为研究塑性力学需要,对材料提出
如下附加假设: ① 球应力引起了全部体变(即体积改变量),而不包含畸变 (即形状改变量),体变是弹性的。因此,球应力不影响 屈服条件; ② 偏斜应力引起了全部畸变,而不包括体变,塑性变形仅是 由应力偏量引起的。因此,在塑性变形过程中材料具有不 可压缩性(即体积应变为零); ③ 不考虑时间因素对材料性质的影响,即认为材料是非粘性 的。
弹塑性力学
§4-1 弹性变形与塑性变形的特点、塑性力学的附加假设(续1)
◆ 大量实验证 实,固体受力
变形时,应力
与应变间的关
系是相辅相成
的。
◆ 固体材料在一定条件下,应力与应变之间各自
弹塑性力学
有着确定的关系,这一关系反映着固体材料的 变形的客观特性。
§4-1 弹性变形与塑性变形的特点、塑性力学的附加假设(续2)
② 模型的数学表达式应足够简单。
弹塑性力学
z c31 x c32 y c33 z c34 xy c35 yz c36 zx
§4-3 弹性本构方程、弹性应变能函数(续2)
◆ 广义虎克定律张量表达式:
c
无关? 系是什么?
ij ijkl kl
§4-3 弹性本构方程、弹性应变能函数(续6)
(4—12)
(4—13)
则弹性体由零应变状态加载至某一应变状态 ij 的过程中, 弹性体整个体积的内力功为:
A
A U d V U d V U (4—13) U d 0 ij ij
ij ij
弹塑性力学
§4-1 弹性变形与塑性变形的特点、塑性力学的附加假设(续5)
⑷ 塑性力学附加假设:为研究塑性力学需要,对材料提出
如下附加假设: ① 球应力引起了全部体变(即体积改变量),而不包含畸变 (即形状改变量),体变是弹性的。因此,球应力不影响 屈服条件; ② 偏斜应力引起了全部畸变,而不包括体变,塑性变形仅是 由应力偏量引起的。因此,在塑性变形过程中材料具有不 可压缩性(即体积应变为零); ③ 不考虑时间因素对材料性质的影响,即认为材料是非粘性 的。
弹塑性力学
§4-1 弹性变形与塑性变形的特点、塑性力学的附加假设(续1)
◆ 大量实验证 实,固体受力
变形时,应力
与应变间的关
系是相辅相成
的。
◆ 固体材料在一定条件下,应力与应变之间各自
弹塑性力学
有着确定的关系,这一关系反映着固体材料的 变形的客观特性。
§4-1 弹性变形与塑性变形的特点、塑性力学的附加假设(续2)
② 模型的数学表达式应足够简单。
弹性力学 本构关系

其中 c i j k l ——称为弹性常数,共81个系数,因 ij 、 ij 各 六个独立, c i j k l 缩减为36个独立的常数。
cmn和cijkl 的下标对应关系:
m、n 1
2
3
4
5
6
ij、kl 11 22 33 12 23 31
如,c22 c2222 , c56 c2331
广义胡克定律的一般形式最广泛地描述了材料的线弹性性 质,但未能描述物体外部环境条件和内部物理特征。
x y
xzy
yz
zx
c11
c12 c11
对
c13
0
c13
0
c33
0
1 2
c11
c12
称
0 0 0
0
c55
0 0 0
0
0 c55
x
y
xzy
yz
zx
横观各向同性材料,其独立的弹性常数为5个;
工程上一般用两个弹性模量(Exy、 Ez ),两个泊松比
z
P (x, y, z)
O
y
x
将 x 轴反向,仿前分析步骤可得
c 1 4 c 1 6 c 2 4 c 2 6 c 3 4 c 3 6 c 4 6 c 5 6 0
将 y 轴反向,不产生新的结果。
综合之,正交各向异性材料的广义胡克定律可表示为
x c11 c12 c13 0 0 0 x
由 同理
x y
U0
xy
c12
y x
U0
xy
c21
c13 c31 c14 c41
c15 c51
c12 c21 LL c56 c65
即
cmn cnm
弹塑性力学 第三章 弹性本构方程 ppt课件

ppt课件
15
式(2)可用矩阵表示
式(3)可用简写为
称为弹性矩阵.
ppt课件
16
三、. 弹性常数
1. 极端各向异性体:
物体内的任一点, 沿各个方向的性能都不相 同, 则称为极端各向异性体. (这种物体的材料极 少见)
即使在极端各向异性条件下, 式(2)中的36个 弹性常数也不是全部独立.
由能量守恒定律和应变能理论可证明,弹性常数 之间存在关系
K E
3(1 2 )
32
应变能:
ppt课件
33
产生的x方向应变:
产生的x方向应变:
叠加
产生的x方向应变:
同理:
ppt课件
7
剪应变:
物理方程:
说明:
1.方程表示了各向同性材料的应力与应 变的关系,称为广义Hooke定义。也称 为本构关系或物理方程。
2.方程组在线弹性条件下成立。
ppt课件
8
三. 体积应变与体积弹性模量
令: 则: 令:
sm称为平均应力; q 称为体积应变
ppt课件
12
当自变量(应变)很小时,式(1)中的各表达式可用泰 勒级数展开.略去二阶及以上的高阶微量,则式(1)中 的第一式展开为:
表示应变分量为零时的值,由基本假设,初始应力为 零.故
表示函数f1对应变分量的一阶偏导数在应变分量为零 时的值,等于一个常数
ppt课件
13
故, 式(1)可用一个线性方程组表示(线弹性体)
ppt课件
23
比较:
可见:
ppt课件
24
§3-3 弹性应变能
弹性体受外力作用后产生变形,外力在其作用位置的 变形上做功。忽略速度、热交换和温度等因素,则外力所 做的功全部转换为应变能储存在物体的内部。
第11章-弹塑性力学--本构关系分析

11.1 广义胡克定律 3 张量表示法
ij cijkl kl (i, j,k ,l 1,2,3)
(11-1’)
广义虎克定律或弹性本构方程 弹性系数 cmn (或cijkl ) 共有36个。对于各向同性材料,独立 的弹性常数只有2个。
附页
ij cijkl kl (i, j,k ,l 1,2,3)
个。
ij ji , ij ji
于是,对均匀的理想弹性体:
x c11 x c12 y c13 z c14 xy c15 yz c16 zx
y
c21 x
c22 y
c23 z
c24 xy
c25
yz
c26
zx
x c31 x c32 y c33 z c34 xy c35 yz c36 zx
不是独立的弹性常数。 对于各向同性弹性体,独立的弹性常数
只有两个, 即 λ和μ或 E 和ν。将式 (11-9) 稍加变换后, 可缩
2
e
2 2
3 e 23
常数λ, μ称为拉梅弹性常数。
(11-2)
通过坐标变换后, 可得任意坐标系 Oxyz 内的本构关系为
x e 2 x , xy xy
y
e
2 y , yz
yz
z
e
2 z , zx
zx
(11-3)
ij ije 2 ij
(11-3’)
以上证明了各向同性的均匀弹性体的弹性常数只有 两个。
证明:首先,在弹性状态下主应力方向与主应变方向相重合
为此,令x, y, z为主应变方向,则剪应变分量γxy,γyz, γzx应等于零。于是,由式 (4-1) 有
xy c41 x c42 y c43 z
弹性力学-本构关系 PPT
x f1 x , y , z , xy , yz , zx y f2 x , y , z , xy , yz , zx z f3 x , y , z , xy , yz , zx xy f4 x , y , z , xy , yz , zx yz f5 x , y , z , xy , yz , zx zx f6 x , y , z , xy , yz , zx 如果材料 ij f ij 呈单值连续关系(不一定线性),则
xzy
yz
zx
c12 c12 c11 c12
c11
对
0
0
0
1 2
c11
c12
称
0 0 0
0
1 2
c11
c12
各向同性材料独立的弹性常数只有2个
0
0
x
0
y
0
xzy
第四章 本构关系
§4-1 物体的弹性性质和广义胡克定律 §4-2 线弹性材料的本构关系 §4-3 各向同性线弹性材料的物理方程
§4-1 物体的弹性性质·广义Hooke定律
一. 弹性的概念
一般情况下,物体的应力与应变呈某一函数关系,可表示为:
ij f ij
应力与应变张量均为六个独立分量。则
xy c41 x c42 y c43 z c44 xy c45 yz c46 zx
yz c51 x c52 y c53 z c54 xy c55 yz c56 zx
xzy
yz
zx
c12 c12 c11 c12
c11
对
0
0
0
1 2
c11
c12
称
0 0 0
0
1 2
c11
c12
各向同性材料独立的弹性常数只有2个
0
0
x
0
y
0
xzy
第四章 本构关系
§4-1 物体的弹性性质和广义胡克定律 §4-2 线弹性材料的本构关系 §4-3 各向同性线弹性材料的物理方程
§4-1 物体的弹性性质·广义Hooke定律
一. 弹性的概念
一般情况下,物体的应力与应变呈某一函数关系,可表示为:
ij f ij
应力与应变张量均为六个独立分量。则
xy c41 x c42 y c43 z c44 xy c45 yz c46 zx
yz c51 x c52 y c53 z c54 xy c55 yz c56 zx
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由 同理
x y
U0
xy
c12
y x
U0
xy
c21
c13 c31 c14 c41
c15 c51
c12 c21 c56 c65
即
cmn c精nm品课件
5
x c11 c12 c13 c14 c15 c16 x
y
c22
c23
c24
c25
c26
y
xzy
对
c33
c34 c44
其中 c i j k l ——称为弹性常数,共81个系数,因 ij 、 ij 各 六个独立, c i j k l 缩减为36个独立的常数。
cmn和cijkl 的下标对应关系:
m、n 1
2
3
4
5
6
ij、kl 11 22 33 12 23 31
如,c22 c2222 , c56 c2331
广义胡克定律的一般形式最广泛地描述了材料的线弹性性 质,但未能描述物体外部环境条件和内部物理特征。
x f 1 x , y , z , x y , y z , z x y f 2 x , y , z , x y , y z , z x z f 3 x , y , z , x y , y z , z x x y f 4 x , y , z , x y , y z , z x y z f 5 x , y , z , x y , y z , z x z x f 6 x , y , z , x y , y z , z x 称为柯如西果(材C料auchijy)f弹i性j 材呈料单精品(值课一连件 般续意关义系上(的不弹一性定)线。性),则2
第四章 本构关系
§4-1 物体的弹性性质和广义胡克定律 §4-2 线弹性材料的本构关系 §4-3 各向同性线弹性材料的物理方程
精品课件
1
§4-1 物体的弹性性质·广义Hooke定律
一. 弹性的概念
一般情况下,物体的应力与应变呈某一函数关系,可表示为:
ij f ij
应力与应变张量均为六个独立分量。则
x c11x c12 y c13z c14 xy c15 yz c16 zx
y c21x c22 y c23z c24 xy c25 yz c26 zx
即
z c31x c32 y c33z c34 xy c35 yz c36 zx
xy c41x c42 y c43z c44 xy c45 yz c46 zx
y
xzy
对
c33 c34 0 c44 0
0 0
xzy
yz
zx
称
c55
c56
yz
c66 zx
横观各向异性材料,其独立的弹性常数为13个;正应变会
产生切应力,切应变也会产生正应力
工程上,单斜晶体(如正长石)可简化为横观各向异性弹
性体。
精品课件
9
二. 正交各向异性材料
弹性体中每一点均有一个对
称方向,在这些对称方向上弹性
性质相同,即应力应变关系不变。
称为弹性对称。
精品课件 弹性主轴
弹性对称方向 6
相应的对称方向和对称面称为弹性对称方向和弹性对称面。 垂直于弹性对称面的方向称为弹性主轴。
一. 横观各向异性材料
仅具有一个弹性对称面的材料称为横观各向异性材料。
设Oxy平面为材料的弹性对称面,z轴为弹性主轴。
c 1 n c 1 1c 1 2c 1 3c 1 4 c 1 5 c 1 6
c 1 n c 1 1c 1 2c 1 3c 1 4c 1 5c 1 6
c15 c16 0
横观各向异性材料的广义胡克定律可表示为
x c11 c12 c13 c14 0
y
c22 c23 c24 0
0 x
0
0
0
y
0
1
0
x
0
0
-1
由坐标变换
代入上式 由
x
y
z
T
x y y z z x
x y z x y
y z
T
z x
C
C C
比较得
c 1 5 c 1 6 c 2 5 c 2 6 c 3 5 c 3 6 c 4 5 c 4 6 0
精品课件
8
例如比较 [C] 和 [C] 中的第一行
yz c51x c52 y c53z c54 xy c55 yz c56 zx
zx c61x c62 y c6精3品z课件c64 xy c65 yz c66 zx
3
矩阵表示形式: C
其中 、 ——分别称为应力和应变列阵
C ——称为弹性矩阵。其元素cmn为36个
张量表示形式: ij cijklkl
精品课件
4
§4-2 线弹性体的本构关系
如果材料在变形过程中处于等温绝热过程。
根据热力学第一定律和相应数学推导, ij f ij 有势,
其势函数U0(ij) 为物体单位体积的变形能(应变能)。
ij
U 0 ij
—— Green公式
x U x 0 , y U y 0 , z U z 0 ,x y U x 0 y , y z U y 0 z, z x U z 0 x
呈线性单值连续关系的材料性质称为线弹性。
在柯西弹性的基础上附加等温绝热的外部环境条件,使
ij f ij 有势函数存在,则这种弹性性质又称为超弹性。可
以证明线弹性一定是超弹性。
二. 广义胡克(Hooke)定律
受材料在单向拉伸试验时弹性阶段的应力与应变呈线性关 系(胡克定律)的启发,线弹性材料在复杂应力状态下其应力 张量与应变张量亦呈线性关系。称为广义胡克定律的一般形式
c35 c45
c36 c46
xzy
yz
zx
称
c55
c56
yz
c66 zx
弹性矩阵为
对称矩阵,共有 21个独立的弹性 常数
广义胡克定律的上述形式表征的是各向异性材料的本构关系。
如果材料具有弹性对称面, 则本构关系还可简化,使弹性常 数进一步缩减。
弹性对称
弹性主轴 弹 性 对 称 方 向
体内一点P(x, y, z)的应力和应变
z
为{ } 和{ }。则
C
弹性对称面
其中[C]为各向异察 其本构关系
P (x, y, -zz))
y
x
精品课件
z
7
在新坐标下,由于弹性对称,应力应变关系保持不变
C
但P点坐标和应力应变分量发生变化
x
y
z
两坐标系三轴的方向余弦为 x
1