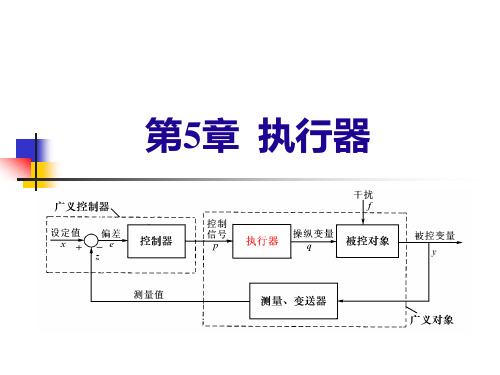
过程控制系统与仪表第5章
过程控制课后习题-答案
.第1章自动控制系统基本概念~~1-3 自动控制系统主要由哪些环节组成?解自动控制系统主要由检测变送器、控制器、执行器和被控对象等四个环节组成。
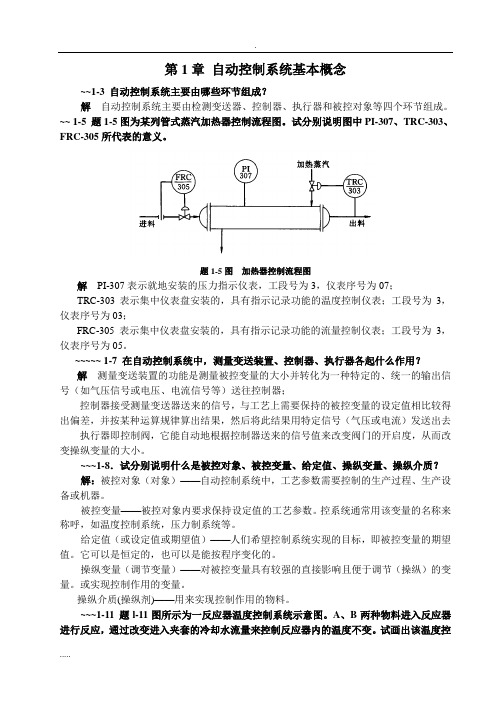
~~ 1-5 题1-5图为某列管式蒸汽加热器控制流程图。
试分别说明图中PI-307、TRC-303、FRC-305所代表的意义。
题1-5图加热器控制流程图解PI-307表示就地安装的压力指示仪表,工段号为3,仪表序号为07;TRC-303表示集中仪表盘安装的,具有指示记录功能的温度控制仪表;工段号为3,仪表序号为03;FRC-305表示集中仪表盘安装的,具有指示记录功能的流量控制仪表;工段号为3,仪表序号为05。
~~~~~ 1-7 在自动控制系统中,测量变送装置、控制器、执行器各起什么作用?解测量变送装置的功能是测量被控变量的大小并转化为一种特定的、统一的输出信号(如气压信号或电压、电流信号等)送往控制器;控制器接受测量变送器送来的信号,与工艺上需要保持的被控变量的设定值相比较得出偏差,并按某种运算规律算出结果,然后将此结果用特定信号(气压或电流)发送出去执行器即控制阀,它能自动地根据控制器送来的信号值来改变阀门的开启度,从而改变操纵变量的大小。
~~~1-8.试分别说明什么是被控对象、被控变量、给定值、操纵变量、操纵介质?解:被控对象(对象)——自动控制系统中,工艺参数需要控制的生产过程、生产设备或机器。
被控变量——被控对象内要求保持设定值的工艺参数。
控系统通常用该变量的名称来称呼,如温度控制系统,压力制系统等。
给定值(或设定值或期望值)——人们希望控制系统实现的目标,即被控变量的期望值。
它可以是恒定的,也可以是能按程序变化的。
操纵变量(调节变量)——对被控变量具有较强的直接影响且便于调节(操纵)的变量。
或实现控制作用的变量。
操纵介质(操纵剂)——用来实现控制作用的物料。
~~~1-11 题l-11图所示为一反应器温度控制系统示意图。
A、B两种物料进入反应器进行反应,通过改变进入夹套的冷却水流量来控制反应器内的温度不变。
过程控制课后习题答案

~~第1章自动控制系统基本概念~~1-3 自动控制系统主要由哪些环节组成?解自动控制系统主要由检测变送器、控制器、执行器和被控对象等四个环节组成。
~~ 1-5 题1-5图为某列管式蒸汽加热器控制流程图。
试分别说明图中PI-307、TRC-303、FRC-305所代表的意义。
题1-5图加热器控制流程图解PI-307表示就地安装的压力指示仪表,工段号为3,仪表序号为07;TRC-303表示集中仪表盘安装的,具有指示记录功能的温度控制仪表;工段号为3,仪表序号为03;FRC-305表示集中仪表盘安装的,具有指示记录功能的流量控制仪表;工段号为3,仪表序号为05。
~~~~~ 1-7 在自动控制系统中,测量变送装置、控制器、执行器各起什么作用?解测量变送装置的功能是测量被控变量的大小并转化为一种特定的、统一的输出信号(如气压信号或电压、电流信号等)送往控制器;控制器接受测量变送器送来的信号,与工艺上需要保持的被控变量的设定值相比较得出偏差,并按某种运算规律算出结果,然后将此结果用特定信号(气压或电流)发送出去执行器即控制阀,它能自动地根据控制器送来的信号值来改变阀门的开启度,从而改变操纵变量的大小。
~~~1-8.试分别说明什么是被控对象、被控变量、给定值、操纵变量、操纵介质?解:被控对象(对象)——自动控制系统中,工艺参数需要控制的生产过程、生产设备或机器。
被控变量——被控对象内要求保持设定值的工艺参数。
控系统通常用该变量的名称来称呼,如温度控制系统,压力制系统等。
给定值(或设定值或期望值)——人们希望控制系统实现的目标,即被控变量的期望值。
它可以是恒定的,也可以是能按程序变化的。
操纵变量(调节变量)——对被控变量具有较强的直接影响且便于调节(操纵)的变量。
或实现控制作用的变量。
操纵介质(操纵剂)——用来实现控制作用的物料。
~~~1-11 题l-11图所示为一反应器温度控制系统示意图。
A、B两种物料进入反应器进行反应,通过改变进入夹套的冷却水流量来控制反应器内的温度不变。
过程控制与自动化仪表(第3版) 第5章 思考题与习题资料
1.基本练习题
(1)过程控制系统方案设计的主要内容有哪些?一般应怎样选择被控参数? 答: 1)主要内容有:熟悉控制系统的技术要求和性能指标;建立控制系统的数学模型;确 定控制方案;根据系统的动态和静态特性进行分析与综合;系统仿真与实验研究;工程设 计;工程安装;控制器参数整定。 2)被控参数的选择: 对于具体的生产过程,应尽可能选取对产品质量和产量、安全生产、经济运行以及环 境保护等具有决定性作用的、可直接进行测量的工艺参数作为被控参数。 当难以用直接参数作为被控参数时,应选取直接参数有单值函数关系的所谓间接参数 作为被控参数。 当采用间接参数时,该参数对产品质量应该具有足够高的控制灵敏度,否则难以保证 对产品质量的控制效果。 被控参数的选择还应考虑工艺上的合理性和所用测量仪表的性能、价格、售后服务等 因素。 (2)控制通道 / T0 的大小是怎样反映控制难易程度的?举例说明控制参数的选择 方法? 答: 1)一般认为,当 / To 0 . 3 时,系统比较容易控制;而当 / To 0 . 5 时,则较难 控制,需要采取特殊措施,如当 难以减小时,可设法增加T o 以减小 / To 的比值,否则 很难收到良好的控制效果。 2)控制参数的选择方法: 选择结果应使控制通道的静态增益 K o 尽可能大,时间常数T o 选择适当。 控制通道的纯时延时间 o 应尽可能小, o 与T o 的比值一般应小于 03。
3)根据动态特性整定公式有:
0.08
2.6
T0
0.6
0.81
T0
TI=0.8 T0 =0.74 min
(4)已知对象控制通道阶跃响应曲线数据如表 5‐4 所示,调节量的阶跃变化幅度为 u 5。
过程控制系统与仪表课后习题答案完整版

第1章思考题与习题 过程控制有哪些主要特点?为什么说过程控制多属慢过程参数控制?解答:.控制对象复杂、控制要求多样 控制方案丰富.控制多属慢过程参数控制.定值控制是过程控制的一种主要控制形式.过程控制系统由规范化的过程检测控制仪表组成 什么是过程控制系统?典型过程控制系统由哪几部分组成?解答:过程控制系统:一般是指工业生产过程中自动控制系统的变量是温度、压力、流量、液位、成份等这样一些变量的系统。
组成:参照图 。
说明过程控制系统的分类方法,通常过程控制系统可分为哪几类?解答:分类方法说明:按所控制的参数来分,有温度控制系统、压力控制系统、流量控制系统等;按控制系统所处理的信号方式来分,有模拟控制系统与数字控制系统;按控制器类型来分,有常规仪表控制系统与计算机控制系统;按控制系统的结构和所完成的功能来分,有串级控制系统、均匀控制系统、自适应控制系统等;按其动作规律来分,有比例( )控制、比例积分( ✋)控制,比例、积分、微分( ✋)控制系统等;按控制系统组成回路的情况来分,有单回路与多回路控制系统、开环与闭环控制系统;按被控参数的数量可分为单变量和多变量控制系统等。
通常分类:.按设定值的形式不同划分:( )定值控制系统( )随动控制系统( )程序控制系统.按系统的结构特点分类:( )反馈控制系统( )前馈控制系统( )前馈 反馈复合控制系统 什么是定值控制系统✍解答:在定值控制系统中设定值是恒定不变的,引起系统被控参数变化的就是扰动信号。
什么是被控对象的静态特性?什么是被控对象的动态特性?二者之间有什么关系?解答:被控对象的静态特性:稳态时控制过程被控参数与控制变量之间的关系称为静态特性。
被控对象的动态特性:。
系统在动态过程中,被控参数与控制变量之间的关系即为控制过程的动态特性。
二者之间的关系: 试说明定值控制系统稳态与动态的含义。
为什么在分析过程控制系统得性能时更关注其动态特性?解答:稳态:对于定值控制,当控制系统输入(设定值和扰动)不变时,整个系统若能达 到一种平衡状态,系统中各个组成环节暂不动作,它们的输出信号都处于相对静止状态,这种状态称为稳态(或静态)。
过程控制技术课后作业答案详解
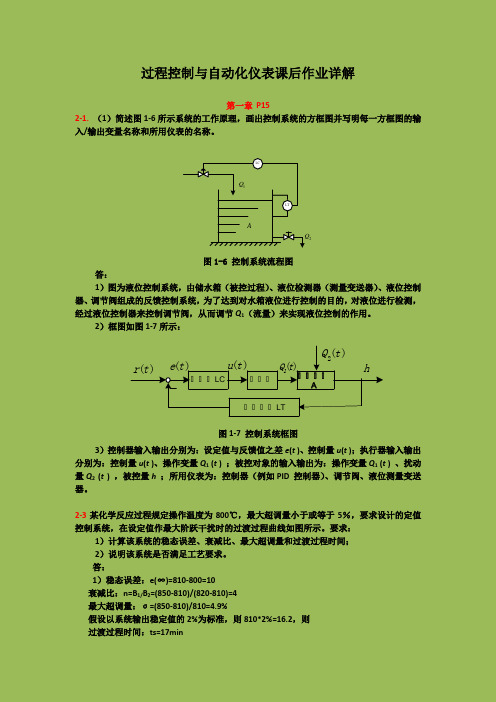
过程控制与自动化仪表课后作业详解第一章 P152-1. (1)简述图1-6所示系统的工作原理,画出控制系统的方框图并写明每一方框图的输入/输出变量名称和所用仪表的名称。
LTLC1Q 2Q A图1-6 控制系统流程图答:1)图为液位控制系统,由储水箱(被控过程)、液位检测器(测量变送器)、液位控制器、调节阀组成的反馈控制系统,为了达到对水箱液位进行控制的目的,对液位进行检测,经过液位控制器来控制调节阀,从而调节Q 1(流量)来实现液位控制的作用。
2)框图如图1-7所示:控控控LC控控控控控控控A控控控控LT_2()Q t ()1Q t ()r t ()e t ()u t h图1-7 控制系统框图3)控制器输入输出分别为:设定值与反馈值之差e (t )、控制量u (t );执行器输入输出分别为:控制量u (t )、操作变量Q 1 (t ) ;被控对象的输入输出为:操作变量Q 1 (t ) 、扰动量Q 2 (t ) ,被控量h ;所用仪表为:控制器(例如PID 控制器)、调节阀、液位测量变送器。
2-3某化学反应过程规定操作温度为800℃,最大超调量小于或等于5%,要求设计的定值控制系统,在设定值作最大阶跃干扰时的过渡过程曲线如图所示。
要求:1)计算该系统的稳态误差、衰减比、最大超调量和过渡过程时间; 2)说明该系统是否满足工艺要求。
答:1)稳态误差:e(∞)=810-800=10衰减比:n=B 1/B 2=(850-810)/(820-810)=4 最大超调量:σ=(850-810)/810=4.9%假设以系统输出稳定值的2%为标准,则810*2%=16.2,则 过渡过程时间:ts=17min2)由于规定操作温度为800︒C ,而系统稳态值为810︒C 所以不满足工艺要求。
第二章P711-3 某台测温仪表测量的上下限为500℃~1000℃,它的最大绝对误差为±2℃,试确定该仪表的精度等级;答:根据题意可知:最大绝对误差为±2℃则精度等级%4.0%1005002±=⨯±=δ 所以仪表精度等级为0.4级1-4某台测温仪表测量的上下限为100℃~1000℃,工艺要求该仪表指示值的误差不得超过±2℃,应选精度等级为多少的仪表才能满足工艺要求?答:由题可得:%22.0%10010010002±=⨯-±=δ仪表精度等级至少0.2以上。
过程控制系统章节练习题及答案 第5章 习题解答
第5章习题解答习题5-1答:所谓简单控制系统,通常是指仅由一个被控过程(或称被控对象)、一个检测变送仪表、一个控制器(或称调节器)和一个执行器(如调节阀)所组成的单闭环负反馈控制系统,也称为单回路控制系统。
其典型方框图如下图所示。
题图5-1 简单控制系统的方框图习题5-2答:控制器正、反作用方式确定的基本原则是保证系统成为负反馈。
也就是说为保证使整个系统构成负反馈的闭环系统,系统中实际控制器、执行器、被控对象和检测变送仪表四部分的开环增益之积必须为负,即(实际控制器±)×(执行器±)×(被控对象±)×(检测变送仪表±)=(-)其中,执行器如为气动调节阀,则其“±”取决于它的“气开”还是“气关”作用方式,“气开”为“+”,“气关”为“-”;被控对象的“±”取决于操作变量和被控变量的关系,操作变量增大,被控变量也增大时称其为“+”,否则称其为“-”;检测变送仪表的“±”取决于被控变量和被控变量的测量值的关系,被控变量增大,被控变量的测量值也增大时称其为“+”,否则称其为“-”。
如上式中实际控制器的增益为正,则控制器为正作用方式;反之为反作用方式。
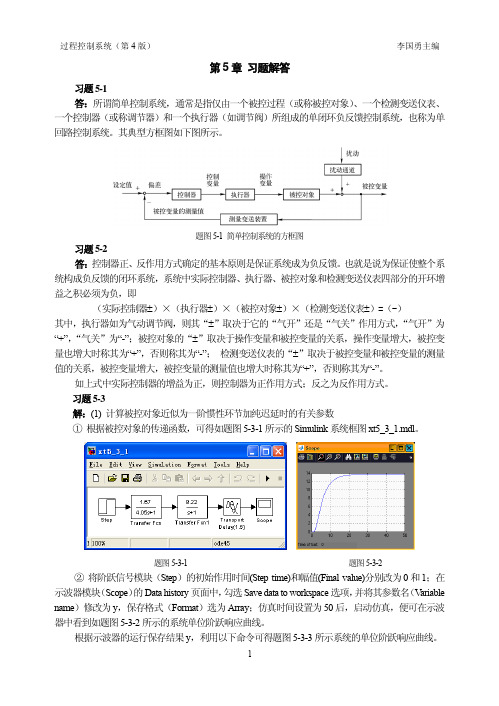
习题5-3解:(1) 计算被控对象近似为一阶惯性环节加纯迟延时的有关参数①根据被控对象的传递函数,可得如题图5-3-1所示的Simulink系统框图xt5_3_1.mdl。
题图5-3-1 题图5-3-2②将阶跃信号模块(Step)的初始作用时间(Step time)和幅值(Final value)分别改为0和1;在示波器模块(Scope)的Data history页面中,勾选Save data to workspace选项,并将其参数名(V ariable name)修改为y,保存格式(Format)选为Array;仿真时间设置为50后,启动仿真,便可在示波器中看到如题图5-3-2所示的系统单位阶跃响应曲线。
过程控制与自动化仪表教学课件5
(a)理想特性为直线型
(b)理想特性为等百分比型
图5-12 并联管道时控制阀的工作流量特性
5.2 气动执行器
(3)调节阀的可调比(R)
调节阀的可调比(可调范围)R为
①理想可调比
R=Qmax/Qmin
调节阀前后压差一定时的可调比称为理想可调比,以R
表示,即
R Qmax K max Qmin K min
(2)按照控制功能分类:可分为位置型执行器(如阀门 开度控制)、速度型执行器(如电机的转速控制)和功率型 控制器(引水机水温控制)。
5.1 概 述
5.1.3 执行器的分类
(3)按执行动作所需能量分类:可分为手动操作器(各种开关、按钮、 旋钮、闸刀等)、电动执行器、气动执行器和液动执行器(少用)等。
p Kmax p Kmin
(5-18)
式中,Kmax和Kmin分别是调节阀的最大流量系数与最小流 量系数。
国产调节阀的理想可调比主要有30和50两种 。
5.2 气动执行器
②实际可调比
调节阀在实际使用时,串联管路系统中管路部分的阻力
变化,将使调节阀前后压差发生变化,从而使调节阀的可
调比也发生相应的变化,这时的可调比称实际可调比,以
5.2 气动执行器
2.控制阀的流量系数(反映调节阀的流通能力)
流量系数Kv定义为:采用国际单位制,在控制阀全开 , 调节阀前后压差为100kPa,流体密度为1g/cm3(即5~40℃的
水)的条件下,每小时通过阀门的流体量(m3/h)。该定义下的
流量系数Kv即额定流量系数
Kv的计算:若将式(5-5)中p的单位取为kPa,则可得不
大流量Qmax为参比值。
5.2 气动执行器
并联管道时控制阀的工作流量特性曲线
过程控制系统与仪表

被控变量
干扰f
控制器1
变送器1
执行器
被控对象
+
e
实测值
-
变送器2Biblioteka 控制器2+
+
前馈-反馈复合控制系统原理框图
过程控制系统的性能指标 当被控对象受到干扰、被控变量发生变化时,控制系统抵制干扰、纠正被控变量的过程,反映了控制系统的优劣.为此,要有评价控制系统的性能指标. 控制系统的性能指标是根据工艺对控制的要求来制定的,概括为稳定性、准确性和快速性.
阶跃信号的输入突然,对被控变量的影响也最大.如果一个控制系统能够有效地克服这种干扰,那么对其它比较缓和的干扰也能很好地克服. 阶跃信号的形式简单,容易实现,便于分析、实验和计算.故更多使用阶跃信号.
如图,输入信号在 t = 0时,阶跃上升幅度为 A ,其后保持.表达为
f <t> = A < t >
TC
TT
在讨论控制系统工作原理时,为清楚地表示自动控制系统各组成部分的作用及相互关系,一般用原理框图来表示控制系统. 如图2的室温控制系统是由温度变送器、控制器、电动调节阀和加热器及房间组成.
给定值
被控变量
干扰f
控制器
变送器
调节阀
加热器 及房间
+
e
实测值
送风
回风
恒温室
温度计
阀门
图1 室温人工控制示意图
眼看——用传感器或变送器将温度信号转换为控制器可接受的信号. 脑想——控制器将输入的实测温度信号和要求值进行比较〔相减求偏差> ,并按偏差值计算出控制量. 手动——人工阀门换成控制阀,按控制信号自动改变开度. 人工控制受制于人的经验和注意力,控制不精确.而自动控制按设定好的方案进行计算控制,可以做到精确的、恰当的控制.
过程控制系统与仪表课后习题答案完整版

第1章思考题与习题1—1 过程控制有哪些主要特点?为什么说过程控制多属慢过程参数控制?解答:1.控制对象复杂、控制要求多样2。
控制方案丰富3.控制多属慢过程参数控制4.定值控制是过程控制的一种主要控制形式5.过程控制系统由规范化的过程检测控制仪表组成1—2 什么是过程控制系统?典型过程控制系统由哪几部分组成?解答:过程控制系统:一般是指工业生产过程中自动控制系统的变量是温度、压力、流量、液位、成份等这样一些变量的系统。
组成:参照图1-1。
1—4 说明过程控制系统的分类方法,通常过程控制系统可分为哪几类?解答:分类方法说明:按所控制的参数来分,有温度控制系统、压力控制系统、流量控制系统等;按控制系统所处理的信号方式来分,有模拟控制系统与数字控制系统;按控制器类型来分,有常规仪表控制系统与计算机控制系统;按控制系统的结构和所完成的功能来分,有串级控制系统、均匀控制系统、自适应控制系统等;按其动作规律来分,有比例(P)控制、比例积分(PI)控制,比例、积分、微分(PID)控制系统等;按控制系统组成回路的情况来分,有单回路与多回路控制系统、开环与闭环控制系统;按被控参数的数量可分为单变量和多变量控制系统等。
通常分类:1.按设定值的形式不同划分:(1)定值控制系统(2)随动控制系统(3)程序控制系统2.按系统的结构特点分类:(1)反馈控制系统(2)前馈控制系统(3)前馈—反馈复合控制系统1—5 什么是定值控制系统?解答:在定值控制系统中设定值是恒定不变的,引起系统被控参数变化的就是扰动信号。
1—6 什么是被控对象的静态特性?什么是被控对象的动态特性?二者之间有什么关系?解答:被控对象的静态特性:稳态时控制过程被控参数与控制变量之间的关系称为静态特性.被控对象的动态特性:。
系统在动态过程中,被控参数与控制变量之间的关系即为控制过程的动态特性.二者之间的关系:1—7 试说明定值控制系统稳态与动态的含义。
为什么在分析过程控制系统得性能时更关注其动态特性?解答:稳态:对于定值控制,当控制系统输入(设定值和扰动)不变时,整个系统若能达到一种平衡状态,系统中各个组成环节暂不动作,它们的输出信号都处于相对静止状态,这种状态称为稳态(或静态).动态:从外部扰动出现、平衡状态遭到破坏、自动控制装置开始动作,到整个系统又建立新的稳态(达到新的平衡)、调节过程结束的这一段时间,整个系统各个环节的状态和参数都处于变化的过程之中,这种状态称为动态.在实际的生产过程中,被控过程常常受到各种振动的影响,不可能一直工作在稳态。
过程控制仪表及控制系统第05章-过程执行仪表课件

5.3.2气动薄膜调节阀
对数流特性(等百分比流量特性):对数流特性指单位相对
位移所引起的相对流量成百分比。即调节阀的放大系数
是变化的,随着对数流量的增大,K亦增大。用数字表示
为
dQ
Qm ax dl
K Q Qm ax
KV
L
KV 为调节阀的放大系数。
5.3.2气动薄膜调节阀
快开流特性:这种流量特性调节阀,在小开度时,流量 已很大,随着开度增大,流量很快达到最大值(全开流 量)故称为快开流量特性。用数字表示为
阀的可调范围
R Qm ax Cm ax
p
Cmax
Qm in
Cm in
p
Cm in
可见理想可调范围是其最大流通能力与最小流通能力之
比。反映了调节阀调节能力的大小,希望可调的范围大
者为好,一般R=30~50。
5.3.2气动薄膜调节阀
工作流量特性介绍 工作可调范围:调节阀在实际工作时,由于管道的阻力 变化,阀前后压差也随之变化的调节范围,称为工作可 调范围(或实际可调范围),可分为串联管道和并联管 道两种情况来讨论。
调节阀
5.1概述
根据能源种类,执行器可分为电动执行器、气动执行器、液动执 行器
主要特性 电动执行器 气动执行器 液动执行器
构造
复杂
简单
简单
体积
小
中
大
配管配线 简单
较复杂
复杂
推力
小
中
大
动作滞后 小
大
小
维护检修 复杂
简单
简单
使用场合
不适合防火 适合防火防 要注意火花
防爆
爆
价格
高
低
过程控制技术 第5章(1)

出于成本和安全的原因,有些过程控制由于实验的成本太大,或者危险性太高,不便进行 实际系统的试验和核实,为了检验所选方案的可行性与合理性,改用其数学模型代替实际过程, 进行仿真模拟试验,同时也为优化设计和修改缺陷等提供机会。如核电站的控制、大型水电站、 火力发电厂的控制等。 (4)为了培养和训练操作人员和技术人员 可利用数学模型及其相关设备,对操作人员进行上岗前的培养和训练,使其熟练掌握操作 要领和处置方法,为胜任即将开始的工作创造条件;对过程控制中的故障诊断和排除,可利用 数学模型及相应的配套设施进行实践与演练,为保障系统正常运行培养人材。 2.过程建模的要求 将一个实际的物理过程抽象为控制用的数学模型,本身就要忽略很多因素,该模型仅仅是 从动态特性方面对实际过程的一种近似数学描述,并且其表达形式必须有利于后续的处理与应 用。因此,“突出本质,去繁就简” 将是建模的基本原则。
5.1.2 过程建模的目的与要求
1.建模目的
数学模型在实践中的作用是多方面的,如分析和发现问题、预测发展变化、检验效果等等。 就过程控制而言,建模目的主要体现在以下几个方面: (1)为了选用合适的控制方案与控制算法
被控过程决定控制方案和控制算法。由于被控过程的多样性、特殊性,加上对产品要求的 异同性,过程控制系统之间,从选型到组成、从硬件到软件可能相差很大。只有获得过程的动 态数学模型,才对其具体情况做到心中有数,从而有针对性地选择控制方案和控制算法。例如, 有的过程因受干扰对系统性能影响很大,并且对干扰的源头、强度和路径等有所了解,如果选 用前馈-反馈复合控制系统,如果采用 PID 控制,就难以达到预期的控制效果。
实际中的被控过程是多种多样的,其特性也千差万别。有的简单明了,控制起来方便快捷, 有的错综复杂,运行起来,迟迟不能到位。究其原因,主要是由被控过程本身的工艺流程和设 备实际引起的。也就是说,被控过程的设备与工艺要求,决定了控制任务的难易程度,决定了 采用何种控制方案、选用什么控制策略、装置和仪表等。
过程控制系统与仪表
一、简答题1、控制系统具有哪些特点?答:(1)控制对象复杂、控制要求多样;(2)控制方案丰富;(3)控制多属慢过程参数控制;(4)定值控制是过程控制的一种主要控制形式;(5)过程控制系统由规范化的过程检测控制仪表组成。
2、为什么常采用阶跃信号作为输入?答:对于一个稳定的控制系统(所有正常工作的反馈控制系统都是稳定系统),要求分析其稳定性、准确性和快速性,就需要对系统的过渡过程进行分析研究。
为了简化分析,在保证系统安全的条件下,只对一些典型的扰动形式引起的过渡过程进行分析,其中最常用的是阶跃输入。
阶跃输入形式简单、容易产生,便于分析、计算和进行试验。
3、什么是零点迁移?什么情况下零点迁移?答:(1)抵消固定压差实现零点对齐的措施称为“零点迁移”。
(2)零点迁移其实质是改变测量仪表的零点,同事改变了测量范围的上、下限。
如果固定压差为负则需负迁移,如果固定压差为正则需正迁移。
4、控制仪表的发展有哪些阶段?答:第一阶段为基地式控制仪表;第二阶段为单元组合式控制仪表;第三阶段为以微处理器为中心的控制仪表。
5、基本控制规律是什么?有哪些基本控制?各自有什么特点?为什么积分控制、微分控制不能单独使用?答:(1)基本控制规律是指控制器的输出信号与输入偏差信号之间的关系。
(2)比例控制(P)、比例积分控制(PI)、比例微分控制。
(3)①控制器的比例度P越小,它的放大倍数Kp越大,它将偏差放大的能力越强、控制力也越强,反之亦然;存在余差是比例控制的缺点。
②积分时间T I越小,积分作用越强,反之积分之间T I越弱;积分控制器组成控制系统可以达到无余差。
③T D为微分时间常数,T D越大,微分作用越强,T D等于零时,微分作用消失;微分的特点是能起到超前控制的作用。
(4)①积分作用输出信号的变化速度与偏差e及1/T I成正比,但其控制作用是随着时间累计才逐渐增强的,控制动作缓慢,控制不及时,因此积分作用一般不单独使用,常常把比例与积分组合使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由两个一阶惯 性环节串联起来, 操 纵 变 量 是 Δμ1 , 被控变量是第二个 水槽的水位h2。
C2
过程控制系统与仪表 第5章
可以求出传递函数:
H 2 (s) K W(s) 1 (s) (T1s 1)(T2s 1)
式中: T1=A1 R2
Δμ1
Kμ
T2=A2 R3
K=Kμ R3
RS ——阀门2阻力系数;Kμ ——阀门1比例系数;μ1 — —阀门1的开度;
过程控制系统与仪表 第5章
解得 即
d h 1 1 ( K 1 h) dt A Rs
dΔh ARs Δh K μ Rs Δμ1 dt dh T h K1 dt
TS H(S) + H(S) = Kμ1(S)
过程控制系统与仪表 第5章
单容无自衡特性 若阀门1突然开大∆μ1 , 则Q1增大,Q2不变化。
dh Q1 Q2 A dt ∆ Q1 = Kμ∆μ1
阀门1
dh A K 1 dt
令
ΔQ2 =0
Q10
k A
— 称飞升速度
h h0 Q20
dh 则: 1 dt
H(s) 传函: W(s) 1 (s) s
应曲线如图所 示。
过程控制系统与仪表 第5章
T也反映了过渡过程时间
y∞)
被控变量变化到新的稳态 值所需要的时间理论上需要无 限长。 t
y(t ) Kx 0 (1-e T )
t T 3T
当t→∞时,才有y=Kx0
-3
,但是当t
=3T 时,便有:
y(3T ) Kx 0 (1-e ) 0.95Kx 0 0.95y( )
传递函数是指用拉氏变换式表示的对象特性。
被控对象
x r (t)
x c (t)
W (s) =
X c (s)
X r (s)
过程控制系统与仪表 第5章
5.2建立被控过程数学模型的基本方法
求对象的数学模型有两条途径:
型。 由于影响生产过程的因素较多,单纯用机理法 建模较困难,一般用机理法的分析结论,指导测试 结果的辨识。 机理法:根据生产过程的内部机理,列写出有 测试法:通过实验测试,来识别对象的数学模
过程控制系统与仪表 第5章
此时,对象的输入量是流入水槽的流量Q1 ,对 象的输出量是液位h。 Q1 W(S) h 机理建模步骤: 从水槽的物料平衡关 系考虑,找出表征h与Q1 关 系的方程式。 设水槽的截面积为A
阀门1
Q10 阀门2 h0 Q20
Ql0= Q20时,系统处于 平衡状态,即静态。 这时液位稳定在h0
0.632 y∞)
t T
y(T ) Kx 0 (1-e )
-1
T t
0.632 Kx 0
过程控制系统与仪表 第5章
T反映了对象输出对输入的响应速度
T越大,响应越慢。如水槽对象中 T=ARS ,说 明水槽面积越大,水位变化越慢。 在相同的 阶跃输入作用
下,对象的时
间常数不同时,
被控变量的响
过程控制系统与仪表 第5章
在S形曲线的拐点上作一切线,若将它与时间 轴的交点近似为反应曲线的起点,则曲线可表达为 带滞后的一阶特性:
∆h2(t)= K0∆μ1 (1-e 0
s c
-( t-τc) T0
)
t ≥τ
c c
t <τ
W(S) e
K0 T0S 1
Δh2(∞)
0
τ
c
T0
t
过程控制系统与仪表 第5章
x(t)= x1(t)+ x2(t)
其中, x2(t)= - x1(t -Δt)
x x0 t x0 x x x0 Δt t Δt t
+
过程控制系统与仪表 第5章
x
对应的响应也为两个阶跃 响应之和: y(t)= y1(t)+ y2(t) = y1(t)- y1(t-Δt) 根据此式,方波响应可 逐 点 拆 分 为 飞 升 曲 线 y1(t) 和 y2(t)。
典型代表是水槽的水位特性。
过程控制系统与仪表 第5章
5.3.2.1单容贮液箱液位过程I
如图是一个水槽,水经过阀门l不断地流入水槽, 水槽内的水又通过阀门2不断流出。工艺上要求水槽 的液位h保持一定数值。在这里,水槽就是被控对象, 液位h就是被控变量。
如果想通过调节阀门1 来控制液位,就应了解进 水流量Q1 变化时,液位h是 如何变化的。
t
K 越大,表示对象的输入对输出的影响越大。
过程控制系统与仪表 第5章
时间常数的物理意义 对象受到阶跃输入后,输出达到新的稳态值 的63.2%所需的时间,就是时间常数T。 或对象受到阶跃输入后,输出若保持初始速 度变化到新的稳态值所需时间就是时间常数。
求法:
y(t ) [ Kx 0 (1-e )]t T
如阀门阻力系数 RS ,它影响放大系数 K 的大
小。 K = RS
过程控制系统与仪表 第5章
5.3.2.2被控过程的自衡特性与单容贮液箱液位过程II
从一阶惯性特性曲线可 以看出,对象在扰动作用下,1 其平衡状态被破坏后,在没 有人工干预或调节器干预下, 能自动达到新的平衡状态, 这种特性称为“自衡特性”。
过程控制系统与仪表 第5章
2.矩形脉冲法测定被控过程的阶跃响应曲线 有些工艺对象不允许长时间施加较大幅度的扰 动,那么施加脉宽为△t的方波脉冲,得到的响应曲 线称为“方波响应”。
过程控制系统与仪表 第5章
方波响应可以转换成飞升曲线。
原理:方波信号是两个阶跃信号的代数和。 一个是在t = 0时加入的正阶跃信号x1(t) 另 一个是在 t =Δt 时加入的负阶跃信号x2(t)
0 y
t
0 y
τ
t
0
τ
t
过程控制系统与仪表 第5章
1.由阶跃响应曲线确定一阶惯性加滞后环节模型 一阶对象的特性参数都具有明显的物理意义:
W(S) e
s
K T S 1
x x0
放大倍数K的物理意义
y
t
K表明了稳态时,输出 对输入的放大倍数 。求法:
y(∞ )
K = y(∞ ) / x0
过程控制系统与仪表 第5章
5.4.1阶跃响应曲线法建模
给对象输入一阶跃信号或方波信号测其输出响
应。 1.阶跃响应曲线的直接测定
Δμ1 1 t Δh K T t
在被控过程处于开环、稳 态时,将选定的输入量做一阶 跃变化(如将阀门开大) , 测试记录输出量的变化数据, 所得到的记录曲线就是被控过 程的阶跃响应曲线。
R2 A1 C2 R3
由两个一阶惯性特 性乘积而成。
又称二阶惯性。
A2
过程控制系统与仪表 第5章
当输入量是阶跃 增量Δ μ1 时,被控变 量Δ h2的反应(飞升) 曲线呈S型。
为简化数学模型, 可以用带滞后的单容过 程来近似。
Δh2 Δh2(∞)
0 Δh2 Δh2(∞)
t
0 τ 0
t
所谓滞后是指被控变量的变化落后于扰动变化 的时间。
℃
0 τ 0
t
过程控制系统与仪表 第5章
纯滞后时间
l τ0 v
℃
v ——水的流速;
0 τ 0 t
有些对象容量滞后
与纯滞后同时存在,很 难严格区分。常把两者 合起来,统称为滞后时
间τ
Δh2(∞)
τ=τ o +τc
0
τ
0
τ
c
T0
t
过程控制系统与仪表 第5章
5.4测试法建模
根据工业过程中某因果变量的实测数据,进行 数学处理后得到的数学模型。 测定对象特性的实验方法主要有三种: (1)时域法——输入阶跃或方波信号,测对 象的飞升曲线或方波响应曲线。 (2)频域法——输入正弦波或近似正弦波, 测对象的频率特性。 (3)统计相关法——输入随机噪音信号,测 对象参数的变化。
Δμ1
t Δh
K t
T
用自衡率ρ表征对象自衡能力的大小
过程控制系统与仪表 第5章
1 1 h( ) K
与放大系数K互为倒数
如果ρ大,说明对象的自 衡能力大 。即对象能以较小 的自我调整量Δh(∞),来抵 消较大的扰动量Δμ1。
1
Δμ1
t Δh
K t
T
并不是所有被控过程都具有自衡特性。同样的 单容水槽如果出水用泵抽出,则成为无自衡特性。
令:T = ARs ——时间常数; K = KμRs——放大倍数。
写成标准形式 进行拉氏变换 传递函数为:
H ( s) K μ1 ( s ) Ts 1
过程控制系统与仪表 第5章
阶跃响应(飞升)曲线
输入量μ1作一阶跃变化(Δμ1)时,其输出 (Δh)随时间变化的曲线。
Δμ1 1 t Δh K T t
关的平衡方程,从而获取对象的数学模型。
过程控制系统与仪表 第5章
5.3机理法建模
5.3.1机理法建模的基本原理 通过分析生产过程的内部机理,找出变量之间的 关系。如物料平衡方程、能量平衡方程、化学反应定 律、电路基本定律等,从而导出对象的数学模型。 5.3.2单容过程建模
当对象的输入输出可以用一阶微分方程式来描 述时,称为单容过程或一阶特性对象。 大部分工业 对象可以用一阶特性描述。
过程控制系统与仪表 第5章
第5章
被控过程的数学模型
控制系统的控制过程品质主要取决于系统的结构 和系统中各组成环节的特性。
系统特性—是指控制系统输入输出之间的关系。
环节特性—是指环节本身输入输出之间的关系。
干扰f + 给定值