单片机操作系统有哪些
七大主流单片机介绍

七大主流单片机介绍单片机(Microcontroller)是一种内部集成了微处理器核心、存储器和各种输入输出接口的集成电路。
在现代电子产品中,单片机得到广泛应用,已经成为了数字化时代中不可或缺的一部分。
本文将为您介绍七大主流的单片机产品。
一、STM32系列单片机STM32系列单片机是由意法半导体(STMicroelectronics)推出的一款基于ARM Cortex-M内核的单片机。
该系列单片机功能强大,性能稳定可靠,并且具有低功耗、高性价比等优势。
它们适用于各种应用领域,如工业自动化、智能家居、医疗设备等。
二、PIC系列单片机PIC系列单片机是由美国微芯科技(Microchip Technology)研发的一款经典单片机。
这种单片机易于使用且功能强大,支持广泛的外设和通信接口。
它们在电子产品领域中得到了广泛应用,如汽车电子、消费电子、嵌入式系统等。
三、AVR系列单片机AVR系列单片机是由挪威阿塔尔(Atmel)公司设计的一款高性能单片机。
这种单片机具有低功耗、高速度和丰富的外设资源。
它们适用于嵌入式系统、工业控制、汽车电子等领域。
四、8051系列单片机8051系列单片机是由Intel公司首先推出的一款经典单片机。
这种单片机采用了CISC指令集架构,具有成熟的软硬件生态系统。
它们广泛应用于家电控制、安防系统、电子仪器等领域。
五、Arduino系列单片机Arduino系列单片机是一种开源硬件平台,包括了硬件和开发环境。
这种单片机易于上手,适合初学者学习和创作各种交互式项目。
它们广泛用于教育、艺术创作、物联网等领域。
六、Raspberry Pi系列单片机Raspberry Pi系列单片机是一种基于Linux操作系统的嵌入式计算机。
这种单片机具有强大的计算能力和丰富的扩展接口,适合搭建服务器、智能家居系统等复杂应用。
七、NXP系列单片机NXP系列单片机是由恩智浦(NXP)半导体公司生产的一种高性能单片机。
单片机和嵌入式系统linux的区别

单片机和嵌入式系统linux的区别
在如今高速发展的社会下,电子信息技术的更新迭代相当迅速,想要不被社会淘汰,就要不断更新自己的技术水平。
本文简单分析了单片机与嵌入式系统的联系、组成结构对比等基础知识,并列举了几种适用于PIC18F系列单片机的几种嵌入式技术实时操作系统。
单片机与嵌入式系统的区别单片机和嵌入式linux区别
(1)单片机基本结构
单片机由运算器、控制器、存储器、输入输出设备构成。
(2)嵌入式系统成部分:
嵌入式系统一般由以下几组嵌入式微处理器、外围硬件设备、嵌入式操作系统、特定的应用程序。
51单片机操作系统
嵌入式实时操作系统,可以充分的利用单片机的资源,提高CPU使用效率。
操作系统最主要就是实现任务的调度、管理。
同时对于实时操作系统来说响应时间很重要。
操作系统编写最主要就是用到了堆栈SP于RET指令。
这两个东西怎么用呢?其实在我们每次调用函数的时候都会自动将函数的断点地址(执行函数调用时的PC)压入到SP中,而从函数中返回时其实是利用RET指令将断点弹回到PC(程序指针)中。
所以利用堆栈和RET指令就可以实现简单的任务的切换。
这么说肯定挺模糊的,接下来一步一步解释。
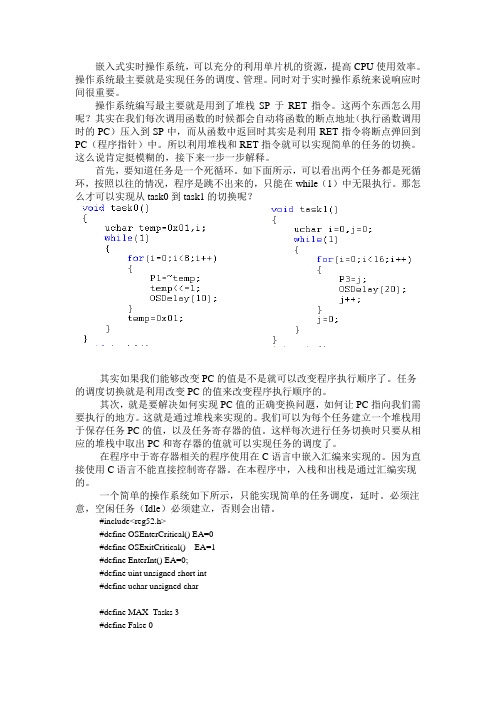
首先,要知道任务是一个死循环。
如下面所示,可以看出两个任务都是死循环,按照以往的情况,程序是跳不出来的,只能在while(1)中无限执行。
那怎么才可以实现从task0到task1的切换呢?其实如果我们能够改变PC的值是不是就可以改变程序执行顺序了。
任务的调度切换就是利用改变PC的值来改变程序执行顺序的。
其次,就是要解决如何实现PC值的正确变换问题,如何让PC指向我们需要执行的地方。
这就是通过堆栈来实现的。
我们可以为每个任务建立一个堆栈用于保存任务PC的值,以及任务寄存器的值。
这样每次进行任务切换时只要从相应的堆栈中取出PC和寄存器的值就可以实现任务的调度了。
在程序中于寄存器相关的程序使用在C语言中嵌入汇编来实现的。
因为直接使用C语言不能直接控制寄存器。
在本程序中,入栈和出栈是通过汇编实现的。
一个简单的操作系统如下所示,只能实现简单的任务调度,延时。
必须注意,空闲任务(Idle)必须建立,否则会出错。
#include<reg52.h>#define OSEnterCritical() EA=0#define OSExitCritical() EA=1#define EnterInt() EA=0;#define uint unsigned short int#define uchar unsigned char#define MAX_Tasks 3#define False 0#define Ture 1#define MaxPrio 2#define IdlePrio MaxPrio#define OS_Task_Create_Error 1#define OS_Delet_Task_Error 2#define OS_Delet_Task_Not_Exit 3#define OS_Resume_Idle_Error 4#define OS_Resume_Task_Error 5typedef struct{uchar OSStackTop; //SPuchar OSSuspend;uchar OSTCBDly; //delay time}OSTCB;uchar code OSMapTbl[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};OSTCB OSTCBTbl[MAX_Tasks];volatile uchar OSRdyTbl;volatile uchar OSIntNesting; //用于中断锁死volatile uchar OSSchNesting; //任务切换上锁volatile uchar OSRuning=False;volatile uchar OSStartStack[MAX_Tasks][20];volatile uchar OSPoint[MAX_Tasks][2];volatile uchar OSPrioCur;//volatile uchar OSTaskPend;OSInit(){// uchar i;EA=0;ET0=1;TMOD=0x01;TH0=0xB1;TL0=0xE0;OSRdyTbl=0;OSIntNesting=0;OSSchNesting=0;}//PCL,PCH,ACC ,B,DPL,DPH,PSW,R0-R7uchar *OSStackInit(uint task,uchar *ptr,uchar OSPrio){uchar* stk;stk=ptr;OSPoint[OSPrio][0]=task;OSPoint[OSPrio][1]=task>>8;*(stk++)= OSPoint[OSPrio][0];*(stk++)= OSPoint[OSPrio][1];*(stk++)= 0x00; //ACC*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk) = 0x00;return stk;}uchar OSTaskCreate(uint task,uchar *ptr,uchar OSPrio){uchar* psp;OSEnterCritical();if(OSPrio<=MaxPrio) //创建的任务优先级有效{psp=OSStackInit(task,ptr,OSPrio); //初始化堆栈OSRdyTbl|=OSMapTbl[OSPrio];OSTCBTbl[OSPrio].OSStackTop=psp;OSTCBTbl[OSPrio].OSSuspend=0;OSTCBTbl[OSPrio].OSTCBDly=0;}else{OSExitCritical();return OS_Task_Create_Error;}OSExitCritical();}/*===================================================== 任务调度函数入口参数:无函数说明:进入函数后,先进行堆栈保护,然后查找最高优先级任务运行======================================================*/void OSSchedule(){uchar i;OSEnterCritical();#pragma asmPUSH ACCPUSH BPUSH DPHPUSH DPLPUSH PSWPUSH 0PUSH 7PUSH 1PUSH 2PUSH 3PUSH 4PUSH 5PUSH 6#pragma endasmOSTCBTbl[OSPrioCur].OSStackTop=SP;if(OSRdyTbl) //如果就续表中有任务{for(i=0; i<MAX_Tasks;i++){if((OSRdyTbl & OSMapTbl[i])&&(!OSTCBTbl[i].OSSuspend)) //任务优先级最高且未被挂起{OSPrioCur=i;break;}}}SP=OSTCBTbl[OSPrioCur].OSStackTop;#pragma asmPOP 6;POP 5;POP 4;POP 3;POP 2;POP 1;POP 7;POP 0;POP PSW;POP DPL;POP DPH;POP B;POP ACC;#pragma endasmOSExitCritical();}void OSStart(){TR0=1;EA=1;while(1);}/*=========================================================延时若干个系统时钟入口参数:延时系统时间个数===========================================================*/ void OSDelay(uchar time){if(time==0)//延时为0,返回return;OSEnterCritical();OSTCBTbl[OSPrioCur].OSTCBDly=time;OSTCBTbl[OSPrioCur].OSSuspend=1;OSExitCritical();OSSchedule();}/*=========================================================任务删除函数入口参数:为被删除任务优先级函数说明:将任务从就绪表中删除===========================================================*/ uchar OSTaskDelet(uchar priority){OSEnterCritical();if(priority>=IdlePrio){OSExitCritical();return OS_Delet_Task_Error;}if(!(OSRdyTbl & OSMapTbl[priority])){OSExitCritical();return OS_Delet_Task_Not_Exit;}OSRdyTbl &= ~(OSMapTbl[priority]);OSExitCritical();if(priority<OSPrioCur){OSSchedule();}}/*=========================================================任务恢复函数入口参数:恢的任务优先级函数说明:恢复被OSTaskDelet()删除的任务===========================================================*/ uchar OSTaskResume(uchar priority){OSEnterCritical();if(priority==IdlePrio)//恢复的任务不能为空闲任务,为空闲任务返回错误标志{OSExitCritical();return OS_Resume_Idle_Error;}if((!(OSRdyTbl & OSMapTbl[priority])) && (priority>=0)){OSRdyTbl |= (OSMapTbl[priority]);}else //返回的任务不存在,返回错误标志{OSExitCritical();return OS_Resume_Task_Error;}OSExitCritical();if(priority<OSPrioCur){OSSchedule();}}/*=============================================================== 定时器0用于产生系统时钟,这里每过20ms中断一次。
第9章 单片机的指令系统说明

计算机总是把操作数当作有符号数(补码形式)看待 并影响PSW的相关标志位。影响情况如下: 进位/借位标志CY: 两数和的D7位有进位时,(CY)=1,否则,(CY)=0。 半进位/借位标志AC: 两数和的D3位有进位时,(AC)=1,否则,(AC)=0。 溢出标志OV: 两数和的D7,D6位只有一位有进位时,(OV)=1;否则, (OV)=0,即OV=C6⊕C7。 奇偶标志P: 当累加器A中“1”的个数为奇数时,(P)=1;为偶数 时(P)=0。
例2 把片外RAM的36H单元中的数据送到片外RAM的 1200H单元。 〈分析〉(36H)→(1200H) 程序如下: MOV R1,#36H MOVX A ,@R1 MOV DPTR,#1200H MOVX @DPTR, A <想一想>下面的程序可以实现吗? MOV DPTR, #1200H MOV R1,#36H MOV @DPTR,@R1 注意:片外RAM之间不能直接传送数据,必须经过累加器 A
例5 试分析8051单片机执行下述指令后,累加器A和PSW各标 志位的变化。 MOV A,#0A5H ADD A,#0CFH 解: (A)=10100101B + Data=11001111B CY 01110100B C7 C6 AC (CY)=C7=1;(AC)=1;溢出标志(OV)=C7⊕C6=1⊕0=1,有 溢出;(P)=0。执行结果:(A)=74H。 若为无符号数运算, (CY)=1,表示结果超出(0~255) 范围。若为带符号数运算,因(-49)+(-91)=-140,超出了 (-128~+127)的范围,所以OV=1溢出。
半字节交换 XCHD A,@Ri SWAP A
;(A3~0)((Ri)3~0) ;(A3~0)(A7~4)
单片机嵌入式操作系统选择指南 适合你的系统
单片机嵌入式操作系统选择指南适合你的系统在嵌入式系统领域,单片机是一种重要的组成部分,而选择合适的操作系统对于单片机的功能和性能起着决定性的作用。
本文将介绍一些常见的单片机嵌入式操作系统,并针对不同应用场景提供一些建议,以帮助选择适合你的系统。
一、嵌入式操作系统的重要性嵌入式系统通常用于控制和管理各种设备,如智能家居、医疗设备、交通工具等。
选择合适的嵌入式操作系统可以提升系统的稳定性、安全性和性能。
以下是一些常见的嵌入式操作系统。
二、常见的嵌入式操作系统1. 实时操作系统(RTOS)实时操作系统(RTOS)是一种专门设计用于处理实时任务的操作系统。
它具有以下特点:高度可靠、响应时间短、实时性强。
常见的RTOS有嵌入式Linux、FreeRTOS、uC/OS等。
2. 裸机编程裸机编程是指直接在单片机上编写程序,不依赖于操作系统。
这种方式效率高,资源占用少,但对开发者的要求较高。
3. 嵌入式Linux嵌入式Linux是一种基于Linux内核的操作系统,具有强大的功能和广泛的应用领域。
它支持多线程、网络连接、文件系统等特性,适用于对功能要求较高的嵌入式系统。
4. uC/OSuC/OS是一种采用优先级调度算法的实时操作系统,具有较小的内存占用和快速的响应时间。
它适用于对实时性要求较高的系统,如工业自动化和航空航天。
5. FreeRTOSFreeRTOS是一种开源的实时操作系统,具有小巧、高效、可靠的特点。
它适用于资源受限、对实时性要求较高的系统,如传感器节点和嵌入式设备。
三、选择适合的操作系统在选择嵌入式操作系统时,需要考虑以下几个因素:1. 功能需求首先需要明确系统的功能需求,包括任务调度、网络连接、文件系统等。
根据需求选择适合的操作系统。
2. 系统的资源限制考虑系统的处理能力、内存大小等资源限制。
对于资源受限的系统,选择轻量级的操作系统或裸机编程可能更为合适。
3. 开发人员的经验和技术开发人员的经验和技术能力对选择操作系统也起着关键的作用。
单片机程序架构详解篇

单片机程序架构详解一、前言单片机,也称为微控制器(Microcontroller),是将计算机的体系结构集成到一个芯片上的微型计算机。
由于其体积小、成本低、可靠性高等特点,单片机在工业控制、智能仪表、家用电器等领域得到了广泛应用。
了解单片机的程序架构是编写和优化单片机程序的关键。
二、单片机程序架构概述单片机的程序架构主要由以下几个部分组成:1. 硬件抽象层(HAL):这一层为上层软件提供了一个与硬件无关的接口,使得软件可以独立于硬件进行开发和运行。
HAL层通常包括对单片机各种外设(如GPIO、UART、SPI、PWM等)的操作函数。
2. 系统服务层:这一层提供了系统级的各种服务,如任务调度、内存管理、时间管理等。
这些服务使得上层应用程序可以更加专注于业务逻辑的实现。
3. 应用层:这是最上层,直接面向用户,包含了各种应用程序的逻辑代码。
三、各层详解1. 硬件抽象层(HAL)硬件抽象层(HAL)是单片机程序架构中非常重要的一层,其主要目标是使得硬件相关的操作与具体的硬件实现无关。
这样,当硬件平台发生变化时,只要HAL层设计得当,上层代码就不需要改变。
HAL层通常包括以下内容:* 各种外设寄存器的操作函数:例如,GPIO的输入输出函数、UART的发送接收函数等。
这些函数隐藏了具体的寄存器操作细节,使得开发者只需要关注功能实现而不需要关心底层寄存器的操作。
* 硬件初始化函数:用于在系统启动时对单片机进行初始化,如配置时钟、启动看门狗等。
* 中断处理函数:用于处理单片机的各种中断事件,如定时器溢出、串口接收等。
2. 系统服务层系统服务层提供了单片机操作系统所需的各种服务,如任务调度、内存管理、时间管理等。
这些服务使得上层应用程序可以更加专注于业务逻辑的实现。
以下是一些常见的系统服务:* 任务调度:多任务环境下,任务调度器负责分配CPU时间给各个任务,使得各个任务能够按需运行。
* 内存管理:负责动态内存的分配和释放,如堆和栈的管理。
03.9 第三章 - 单片机指令系统(位操作指令MOV、SETB、CLR、CPL、ANL、ORL)
;A = 59H = 0101 1001B ;P1 = A = 0101 1001B ;C = 1 ;ACC.1 = 1 ;P1.3 = 0 ;P1.6 = 0 ;P1.2 = 1 ;(20H)= P1 = 0001 0101B ;(30H)= A = 0101 1011B
09:43
单片机技术
8
3.9.2 位控制指令(SETB、CLR、CPL)
;P1.0 = 1 ;ACC.3 = 0 ;C = 1 ;C = 1 ;C = 1 ;P3.4 = 1
09:43
单片机技术
14
3.9.3 位条件转移指令(JC、JB、JBC)
❖ 1.判C转移指令ຫໍສະໝຸດ JC、JNC)JC rel
;先PC←PC+2;若(Cy)= 1时转移,且PC'
=PC+rel,否则顺序执行
CPL bit ;(bit)= (/bit)
▪ 功能:将Cy或bit取反。
09:43
单片机技术
9
3.9.2 位控制指令(SETB、CLR、CPL)
❖ 课堂练习
▪ 执行以下指令?
SETB P1.0 CLR 20H CLR PSW.2 CPL PSW.2 CLR RS0 SETB RS1
;P1.0 = 1 ;20H = 0 ;PSW.2 = 0 ;PSW.2 = 1 ;RS0 = 0 ;RS1 = 1
❖ 1.位置1指令(SETB)
▪ 格式:SETB C ;(Cy) = 1
SETB bit ;(bit)= 1
▪ 功能:将Cy或bit置1。
❖ 2.位置0指令(CLR)
▪ 格式:CLR C ;(Cy) = 0
CLR bit ;(bit)= 0
▪ 功能:将Cy或bit置0。
第3章 MCS-51单片机指令系统

(1)内部数据存储器的低128个字节单元 (00H~7FH)。例: MOV A, 40H ,表示把内 部RAM 40H单元的内容传送给A。 假设40H单元中的内容为2BH,结果是将直接地 址40H单元中的数据2BH传送到累加器A中。
第三章 MCS-51单片机指令系统
3.2.2 直接寻址
(2)特殊功能寄存器。 特殊功能寄存器只能用直接寻址方式进行访问。 对于特殊功能寄存器,在助记符指令中可以直接 用符号来代替地址。例: MOV A, P0 ,表示把 P0口(地址为80H)的内容传送给A。
3.3.1 内部数据存储器传送指令
1.立即数传送指令
MOV A,#data ;A←data MOV Rn,#data ;Rn←data,n=0~7 MOV direct,#data ;direct←data MOV @Ri,#data ;(Ri)←data,i=0,1 MOV DPTR,#data16 ;DPTR←data16 前四条指令将8位立即数传送到指定的存储单元中。 最后一条指令将16位立即数传送到数据指针 DPTR中,其中高8位送入DPH,低8位送入DPL。
(3)三字节指令 编码格式为:
例如数据传送指令MOV 20H,#3AH的编码格式为:
3.2 寻址方式
第三章 MCS-51单片机指令系统
所谓寻址,就是寻找操作数的真正地址,寻址方 式,就是指寻找操作数地址的方式。
在用汇编语言编程时,数据的存放、传送、运算 都要通过指令来完成。 编程者必须自始至终都要 十分清楚操作数的位置, 以及如何将它们传送到适 当的寄存器去参与运算。每一种计算机都具有多 种寻址方式。寻址方式的多少是反映指令系统优 劣的主要指标之一。
2. 汇编语言
汇编语言就是用助记符表示的指令,汇编语言与 机器语言一一对应。用汇编语言编写程序,每条 指令的意义一目了然,给程序的编写、阅读和修 改带来很大方便。而且用汇编语言编写的程序占 用内存少,执行速度快,尤其适用于实时应用场 合的程序设计。因此,在单片机应用系统中主要 是用汇编语言来编写程序。 汇编语言的缺点:缺乏通用性,程序不易移植, 是一种面向机器的低级语言。使用汇编语言编写 程序时,必须熟悉机器的指令系统、寻址方式、 寄存器的设置和使用方法。每种计算机系统都有 它自己的汇编语言。不同计算机的汇编语言之间 不能通用。
单片机指令的实时操作系统与任务调度
单片机指令的实时操作系统与任务调度在单片机应用中,实时操作系统(RTOS)和任务调度是关键的技术。
实时操作系统是一种能够及时响应和处理任务的操作系统,而任务调度是指根据优先级和时间限制来合理地分配任务执行的过程。
本文将探讨单片机指令的实时操作系统与任务调度的相关内容。
一、实时操作系统的概念与特点实时操作系统是一种能够在特定时间范围内完成任务的操作系统。
它具有以下几个特点:1. 响应时间可预测:实时操作系统能够在规定的时间内响应各类任务,保证任务的及时执行。
2. 任务优先级管理:实时操作系统能够根据任务的优先级来进行合理的任务调度,确保高优先级任务优先执行。
3. 任务同步与通信:实时操作系统能够实现任务之间的同步与通信,使得各个任务能够协调工作。
二、单片机指令的实时操作系统设计原则在设计单片机指令的实时操作系统时,需要考虑以下几个原则:1. 系统可靠性:实时操作系统需要具备高度的可靠性,保证任务的及时响应和正确执行。
2. 系统效率:实时操作系统需要尽可能地提高任务的执行效率,减少系统开销和响应时间,提高系统的吞吐量。
3. 任务调度策略:实时操作系统需要设计合适的任务调度策略,根据任务的优先级和时间限制合理分配任务的执行顺序。
三、任务调度算法任务调度算法是实时操作系统中的核心内容,常用的任务调度算法有以下几种:1. 固定优先级调度(Fixed-Priority Scheduling):根据任务的优先级进行调度,具有简单和高效的优点。
2. 循环调度(Round-Robin Scheduling):按照任务的到达顺序和时间片轮转进行调度,公平而灵活。
3. 最早截止时间优先调度(Earliest Deadline First Scheduling):根据任务的截止时间进行调度,保证任务的及时完成。
四、实时操作系统在单片机应用中的实践实时操作系统在单片机应用中具有广泛的应用,例如嵌入式系统、物联网设备等。
在这些应用中,实时操作系统的任务调度发挥着重要的作用。
MCS-51系列单片机的指令系统
51系列单片机指令系统包含5种功能类型的指令,7 种寻址方式,共有111条指令。
addr16 16位目标地址,片外数据存储器或程序存储器以及外 部芯片的地址,用于LCALL和LJMP指令中;
addr11 11位目标地址,片内数据存储器或程序存储器的地址, 用于ACALL和AJMP指令中;
rel 相关地址,8位带符号偏移量,一般是程序存储器字节地址, 通常在跳转类指令中使用,其对应的十进制范围为-128~+127;
立即寻址就是直接给出操作数。
取指令时,即可由程序存储器中直接取得操作数据。51单 片机中除了一条指令(MOV DPTR,#data16)是16位长 的立即数外,其余都是8位的立即数。
例如:MOV A,#30H;无论执行之前A中的内容是多少, 则执行后A=30H。
值得注意的一点是:在立即数寻址中立即数前面必须要加 上一个“#”号,“#”表示其后面内容为立即数而不是一个 字节单元地址。
bit 位地址,针对片内数据存储器中的可位寻址的位使用; DPTR 数据指针,可用做16位的地址寄存器; (X) X指寄存器或十六进制数,则(X)为指向以X寄存器中的内
容为目标地址的单元或以十六进制数据为目标地址的单元; ← 数据传送的方向,将左边的内容送入右边; A 累加器; ACC 直接寻址方式的累加器; B 寄存器B; C 进位标志位,是布尔处理机的累加器,也称为位累加器。
任何一种处理器都必须经过设计人员对
单片机 os 类型

单片机 os 类型
单片机可以使用多种不同类型的操作系统(OS),具体选择取
决于应用需求和资源限制。
以下是一些常见的单片机操作系统类型:
1. 实时操作系统(RTOS),RTOS是专门设计用于处理实时任
务的操作系统。
它们提供了精确的任务调度和响应能力,适用于需
要严格时间限制的应用,例如汽车电子系统、医疗设备和工业自动化。
2. 嵌入式操作系统(Embedded OS),这类操作系统专门为嵌
入式系统设计,通常包括针对特定硬件的驱动程序和优化的内核。
常见的嵌入式操作系统包括uC/OS-II、FreeRTOS和ThreadX等。
3. 轻量级操作系统,针对资源受限的单片机,一些轻量级操作
系统如Contiki、TinyOS和Mbed OS等提供了简化的内核和功能,
以适应有限的存储器和处理能力。
4. 无操作系统(Bare-Metal),在一些资源较为有限的应用场
景下,开发人员选择在单片机上直接编写应用程序而不使用操作系统。
这种方法可以减少系统开销,但也需要开发人员自行处理任务
调度和硬件驱动等问题。
总的来说,选择哪种类型的单片机操作系统取决于应用的实时性要求、资源限制以及开发人员的经验和偏好。
每种类型都有其优势和局限性,需要根据具体情况进行权衡和选择。
单片机中的实时操作系统RTOS概述

单片机中的实时操作系统RTOS概述在单片机应用中,实时性是至关重要的要素之一。
实时操作系统(Real-Time Operating System,RTOS)是一种专门设计用于满足实时性需求的操作系统。
本文将对RTOS进行概述,并介绍其在单片机应用中的重要性和优势。
一、RTOS的定义和特点实时操作系统(RTOS)是一种操作系统,其设计和实现旨在保证任务以可预测和保证的时间内得到正确执行。
实时任务是对时间敏感的任务,其输出结果必须在特定的时间限制内得到响应。
真正的实时操作系统能够保证任务满足其时间约束,并且具有可预测性、可信性、可靠性、高效性等特点。
二、RTOS的应用RTOS在单片机应用中具有广泛的应用。
无论是工业控制、汽车电子、医疗设备还是消费电子产品,都可以利用RTOS来实现任务的调度和管理。
RTOS的应用可以提高系统的实时性、可预测性和稳定性,满足多任务处理的需求。
三、RTOS的重要性1. 实时性要求:在很多单片机应用中,任务需要在特定的时间内完成,例如工业自动化控制中的传感器数据采集和实时控制。
RTOS具备优秀的实时性能,能够满足任务的时限要求,保证系统的可靠性和稳定性。
2. 多任务处理:单片机应用往往需要同时运行多个任务。
通过RTOS可以方便地进行任务调度和管理,提高系统运行效率和资源利用率。
RTOS的多任务处理机制能够按照优先级或其他调度算法合理分配任务的执行顺序,实现任务之间的协调和同步。
3. 硬件抽象:RTOS可以提供丰富的硬件抽象层,与底层硬件进行适配,简化单片机应用的开发过程。
通过RTOS的硬件抽象接口,开发者可以屏蔽底层硬件的差异,快速实现面向任务的高层应用程序。
四、RTOS的优势1. 可靠性:RTOS具备良好的容错和错误处理机制,能够保证任务的可靠性和系统的稳定性。
当出现异常情况时,RTOS能够及时检测和响应,进行错误恢复和处理。
2. 简化开发:RTOS提供全面和易用的任务管理、通信和同步机制,使开发者能够更高效地开发单片机应用。
单片机的实时操作系统
单片机的实时操作系统单片机作为嵌入式系统的核心部件之一,广泛应用于各种电子设备中。
为了更好地满足实时性要求,单片机常常需要搭载实时操作系统(RTOS)。
本文将就单片机实时操作系统的原理、应用以及实现方式进行探讨。
一、实时操作系统的原理实时操作系统是一种能够满足任务严格的时序要求的操作系统。
它能够保证任务的及时响应,并在规定的时间内完成任务。
单片机实时操作系统的核心原理主要包括以下几个方面:1. 任务管理:实时操作系统能够对任务进行管理,按照优先级进行调度。
高优先级的任务将优先执行,保证了对实时任务的及时响应。
2. 中断服务机制:实时操作系统通过中断来实现对任务的及时响应。
当有高优先级任务到达时,操作系统会中断当前任务的执行,处理高优先级任务,然后再返回原任务的执行。
这样可以保证实时任务的执行不受阻塞。
3. 时钟管理:实时操作系统需要准确地控制任务的执行时间,因此需要精确的时钟管理。
单片机实时操作系统通常会使用定时器来提供时钟源,通过定时器中断控制任务的执行时间。
二、实时操作系统的应用单片机实时操作系统广泛应用于需要满足实时性要求的系统中,如航空航天、医疗器械、工业自动化等领域。
以下是实时操作系统在不同领域的应用实例:1. 航空航天领域:实时操作系统被广泛应用于飞行控制系统中,保证飞行器的稳定性和安全性。
它能够及时响应飞行器的各种传感器数据、控制指令,实时调整飞行参数。
2. 医疗器械领域:实时操作系统在医疗器械中的应用主要涉及到对患者生命体征的监测与控制。
例如,心电监护仪、呼吸机等设备需要通过实时操作系统及时获取患者的生理信号,并做出相应的处理和控制。
3. 工业自动化领域:实时操作系统在工业自动化中起到了至关重要的作用。
它能够实时响应各种传感器信号,控制工业设备的运行和生产流程,提高生产效率和质量。
三、实现单片机的实时操作系统目前,市场上有很多针对单片机的实时操作系统可以选择,例如RT-Thread、FreeRTOS等。
#KEILRTX51TINY内核分析(51单片机嵌入式系统)学习操作系统

KEIL RTX51 TINY 内核的分析摘要:简要介绍RTX51TINY 的基本情况和使用方法;详细分析这个内核的任务管理和内存管理的运行机制,并给出其主要代码流程图。
关键词:单片机实时操作系统的 RTX511RTX51 简介1.1 RTX51 TINY 特性RTX51 是KEIL 公司开发的用于 8051系列单片机的多任务实时操作系统。
它有两个版本, RTX51 FULL 和RTX51 TINY 。
RTX51 TINY 是 RTX51 FULL 的子集,仅支持按时间片循环任务调度,支持任务间信号传递,最大 1 6个任务,可以并行地利用中断。
具有以下等待操作:超时、另一个任务或中断的信号。
但它不能进行信息处理,不支持存储区的分配和释放,不支持占先式调度。
RTX51 TINY 一个很小的内核,完全集成在 KEIL C51编译器中。
更重要的是,它仅占用 800字节左右的程序存储空间,可以在没有外放数据存储器的 8051系统中运行,但应用程序仍然可以访问外部存储器。
RTX51 TINY 下文简称为内核。
1.2 RTX51 TINY 的使用内核完全集成在 KEILC51编译器中,以系统函数调用的方式运行,因此可以很容易地使用KEILC51语言编写和编译一个多任务程序,并嵌入到实际应用系统中。
内核提供以下函数供应用程序引用:①char os_create_task(task_id>。
②char os_delete_task(task_id>。
③char os_send_signal(task_id>。
④char isr_send_signal(task_id> 。
⑤char os_clear_signal(task_id> 。
⑥char os_running_task_id(void> 。
⑦char os_wait(event_sel,ticks,dummy> 。
第3章 MCS-51单片机指令系统1
2.操作码:指明指令功能,是指令功能的英文缩写。 汇编语句格式中唯一不能空缺的部分。
MOV__move传送 XCH__exchange交换 ANL__and logic与逻辑运算 XRL__exclusive or异或运算
MUL__Multiply乘法
RR__rotate right右循环 SJMP__short jump短跳转 RET__return 子程序返回 操作码助记符
MCS-51系列单片机指令系统分类
按寻址方式分为以下七种 1、立即寻址 2、直接寻址 3、寄存器寻址 按功能分为以下五种: 1、数据传送指令 2、算术运算指令 3、逻辑运算指令
4、寄存器间接寻址指令
5、相对寻址
4、控制转移指令
5、位操作指令
6、变址寻址
7、位寻址
3.3 指令系统的寻址方式
我的信在她 那!找信去!
快件
目的地
MOV A,#30H
30H
A
这类指令大都是双字节指令,仅有指令:MOV DPTR,#DATA16是三字节指令,它提供两字节立即 数。 第一位数字
是A~F时在 其前加0
对立即数的书写要求:对于单字节立即数,若 数值大于等于A0H,则要在其前面加一个0,如指令 “MOV A,#0A0H”,该指令含义是把立即数A0H送 累加器;对于双字节立即数,若数值大于等于 A000H,则要在其前面加一个0。对于直接地址和偏 移量也按相同方法书写。
1.标号:指令的符号地址 一般由字母和数字组成,第一位必须为字母,冒 号 “ :” 结 束 。 字 符 个 数 不 能 超 过 8 个 。 AD5 、 Q555、BB5D、pat、loop等为合法标号;5P、PA、10AD、+A等为非法标号。 不能用汇编语言已定义的符号作标号。如助记符、 伪指令、寄存器名称等。 同一标号在一个程序中只能定义一次。 标号在语句中的有无取决于本语句是否被访问。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机操作系统有哪些
单片机操作系统有哪些
嵌入式系统虽然起源于微型计算机时代,然而,微型计算机的体积、价位、可靠性都无法满足广大对象系统的嵌入式应用要求,因此,嵌入式系统必须走独立发展道路。
这条道路就是芯片化道路。
将计算机做在一个芯片上,从而开创了嵌入式系统独立发展的单片机时代。
在探索单片机的发展道路时,有过两种模式,即∑模式与创新模式。
∑模式本质上是通用计算机直接芯片化的模式,它将通用计算机系统中的基本单元进行裁剪后,集成在一个芯片上,构成单片微型计算机;创新模式则完全按嵌入式应用要求设计全新的,满足嵌入式应用要求的体系结构、微处理器、指令系统、总线方式、管理模式等。
Intel公司的MCS-48、MCS-51就是按照创新模式发展起来的单片形态的嵌入式系统(单片微型计算机)。
MCS-51是在MCS-48探索基础上,进行全面完善的嵌入式系统。
历史证明,创新模式是嵌入式系统独立发展的正确道路,MCS-51的体系结构也因此成为单片嵌入式系统的典型结构体系。
操作系统分类:。