电气工程2013作业
电气工程及其自动化专业英语作业
专业英语作业(C2S3—P40)alog-DigitalConversionAnMany quantities have continuous values, including temperature, pressure,许多变量都有连续的量值,如温度,压力,displacement, rotation, voltage, current, and intensity of light and sound.位移,旋转角,电压,电流以及光和声音的强度。
The task of quantizing the continuous values into a binary scale is called analog-to-digital conversion (ADC).将连续量化为二进制数字的工作称为模数转换(ADC)Digital-to-analog conversion (DAC) is the inverse process,in which data in discrete values, are converted or restored to a continuously variable form.数模转换是一个相反的过程,它将离散的数据转化或恢复为一个连续可变的形式。
The transducer is the name of the device that produces a voltage or a current proportional to the physical phenomenon to which it responds.传感器是一种装置,它能产生与所反映的实际现象成比例的电压或者电流Analog-to-digital conversion模数转换Only two basic techniques exist for analog-to-digital conversion (ADC).ADC有两种基本方法One is to compare the analog voltage amplitude to a binary voltage scale in which the match yield the binary number that corresponds to the amplitude.一种方法是将模拟电压幅值和二进制电压作比较,在此比较过程中产生与幅值相对应的二进制数。
2013注册电气工程师-供配电-专业案例真题-上下午-文字版
题1-5 某高层办公楼供电电源为交流10KV,频率50HZ,10/0.4KV变电所设在内,10KV侧采用低电阻接地系统,400/230V侧接地型式采用TN-S系统且低压置采用保护总等电位联接系统,请回答下列问题,并列出解答过程。
2013A1接触电流1、因低压系统发生接地故障,办公室有一电气设备的金属外壳带电,若已知干大的接触表面积,50HZ/60HZ交流电流路径为手到手的人体总阻抗Z T见下表人体碰触到该电气设备,交流接触电压为75V,干燥条件,大的接触表面积路径为人体双手对身体躯干成并联,接触电流应为下列哪项数值?人体总阻抗Z T表(A)50mA (B)75mA (C)150mA (D)214mA2013A2工频应力电压2.办公楼10/0.4kV变电所的高压接地系统和低压接地系统相互连接,变电所的接地电阻为3.2Ω,若变电所10kV高压侧发生单相接地故障,接地故障电流为150A,在故障持续期内低压系统接地体与变电所低压设备外露可导电部分之间的工频应力电压为下列哪项数值?A 110VB 220VC 480VD 700V*2013A3低压电缆长度3. 办公楼内一台风机采用交联铜芯电缆YJV-0.6/1kV-3×25+1×16配电,该风机采用断路器的短路保护兼作单相接地故障保护,已知该配电线路保护断路器之前系统的相保电阻为65mΩ,相保电抗为40mΩ,保证断路器在5秒内自动切断故障回路的动作电流为1.62kA,线路单位长度阻抗值见下表,若不计该配电回路保护开关之后线路的电抗和接地故障点的阻抗,该配电线路长度不能超过下列哪项数值?线路单位长度电阻值(mΩ/m)’注1注1:R′为导线20℃时单位长度电阻,R′=C j20S×103(mΩ),=2.82×10−6Ω·cm,铜ρ20=2.82×10−6Ω·cm。
C j为绞入系数,导线截面≤铝ρ206mm2时,C j取为1.0;导线截面>6mm2时,C j取为1.02。
电气工程及其自动化作业指导书

电气工程及其自动化作业指导书第1章电气工程基础 (3)1.1 电路分析基础 (3)1.1.1 电路基本概念 (4)1.1.2 基本电路定律 (4)1.1.3 线性电路分析方法 (4)1.1.4 非线性电路分析 (4)1.2 电磁场理论 (4)1.2.1 麦克斯韦方程组 (4)1.2.2 边界条件与电磁场能量 (4)1.2.3 静电场与恒定电场 (4)1.2.4 稳态磁场与电磁感应 (4)1.3 电机与变压器 (5)1.3.1 电机原理与结构 (5)1.3.2 变压器原理与设计 (5)1.3.3 电机运行分析 (5)1.3.4 变压器的运行与维护 (5)第2章自动控制原理 (5)2.1 控制系统概述 (5)2.2 自动控制系统的数学模型 (6)2.3 控制系统稳定性分析 (6)第3章电力电子技术 (7)3.1 电力电子器件 (7)3.1.1PN结与电力二极管 (7)3.1.2 晶闸管 (7)3.1.3 电力晶体管 (7)3.1.4 其他电力电子器件 (7)3.2 电力电子变换器 (7)3.2.1 整流器 (7)3.2.2 逆变器 (7)3.2.3 交流调压器与交流调功器 (7)3.2.4 直流斩波器 (7)3.3 电力电子电路的应用 (7)3.3.1 变频调速 (7)3.3.2 电力质量控制 (8)3.3.3 电力电子器件在新能源领域的应用 (8)3.3.4 电力电子器件在其他领域的应用 (8)第4章电机控制技术 (8)4.1 电机控制系统概述 (8)4.1.1 控制系统组成 (8)4.1.2 控制系统分类 (8)4.2 直流电机控制 (9)4.2.2 直流电机控制方法 (9)4.3 交流电机控制 (9)4.3.1 交流电机控制原理 (9)4.3.2 交流电机控制方法 (9)第5章电力系统自动化 (9)5.1 电力系统概述 (9)5.2 电力系统监控与保护 (10)5.2.1 监控系统 (10)5.2.2 保护系统 (10)5.3 电力系统自动化装置 (10)5.3.1 远动装置 (10)5.3.2 自动装置 (10)5.3.3 计算机监控系统 (10)第6章工业控制网络 (11)6.1 现场总线技术 (11)6.1.1 现场总线概述 (11)6.1.2 典型现场总线技术 (11)6.1.3 现场总线设备与系统设计 (11)6.2 工业以太网 (11)6.2.1 工业以太网概述 (11)6.2.2 典型工业以太网技术 (11)6.2.3 工业以太网设备与系统设计 (12)6.3 工业控制网络的组建与维护 (12)6.3.1 网络组建 (12)6.3.2 网络维护与管理 (12)第7章嵌入式系统 (12)7.1 嵌入式系统概述 (12)7.2 嵌入式处理器 (13)7.2.1 嵌入式处理器的分类 (13)7.2.2 嵌入式处理器的结构 (13)7.2.3 嵌入式处理器的功能指标 (13)7.2.4 嵌入式处理器在电气工程及其自动化领域的应用 (13)7.3 嵌入式系统设计与实践 (13)7.3.1 嵌入式系统设计流程 (13)7.3.2 嵌入式系统开发工具 (14)7.3.3 嵌入式系统实践方法 (14)7.3.4 嵌入式系统在实际项目中的应用 (14)第8章电气设备检测与维护 (14)8.1 电气设备检测技术 (14)8.1.1 设备检测概述 (14)8.1.2 检测方法 (14)8.2 故障诊断与预测 (15)8.2.1 故障诊断技术 (15)8.3 电气设备维护与管理 (15)8.3.1 设备维护策略 (15)8.3.2 设备管理 (15)第9章电气工程项目管理 (16)9.1 项目管理基础 (16)9.1.1 项目定义与目标 (16)9.1.2 项目组织与管理体系 (16)9.1.3 项目进度管理 (16)9.1.4 项目成本管理 (16)9.2 电气工程项目实施与管理 (16)9.2.1 设计阶段管理 (16)9.2.2 施工阶段管理 (16)9.2.3 设备材料管理 (16)9.2.4 变电所及配电系统管理 (16)9.3 电气工程项目的质量管理与验收 (17)9.3.1 质量管理原则 (17)9.3.2 质量管理体系 (17)9.3.3 施工过程质量控制 (17)9.3.4 工程验收 (17)9.3.5 竣工资料管理 (17)第10章电气工程及其自动化前沿技术 (17)10.1 智能电网技术 (17)10.1.1 高级量测体系 (17)10.1.2 分布式发电接入 (17)10.1.3 需求侧管理 (17)10.1.4 储能系统 (18)10.1.5 电网信息安全 (18)10.2 分布式发电与微电网技术 (18)10.2.1 分布式发电技术 (18)10.2.2 微电网技术 (18)10.3 电动汽车与充电设施技术 (18)10.3.1 电动汽车技术 (18)10.3.2 充电设施技术 (18)10.4 电气工程及其自动化领域的创新与发展趋势 (18)10.4.1 新能源发电 (19)10.4.2 电力电子技术 (19)10.4.3 人工智能应用 (19)第1章电气工程基础1.1 电路分析基础1.1.1 电路基本概念电路定义与分类电路元件及其特性1.1.2 基本电路定律基尔霍夫定律欧姆定律瓦特定理1.1.3 线性电路分析方法节点电压法网孔电流法叠加原理戴维南诺顿等效电路1.1.4 非线性电路分析非线性元件特性非线性电路的解析方法小信号分析法1.2 电磁场理论1.2.1 麦克斯韦方程组高斯定律法拉第电磁感应定律安培定律位移电流定律1.2.2 边界条件与电磁场能量边界条件电磁场能量表达式1.2.3 静电场与恒定电场静电场的求解方法恒定电场的求解方法1.2.4 稳态磁场与电磁感应稳态磁场的求解方法电磁感应的基本原理1.3 电机与变压器1.3.1 电机原理与结构电机的基本原理电机的主要结构电机类型及其特点1.3.2 变压器原理与设计变压器的工作原理变压器的等效电路变压器的参数计算与设计1.3.3 电机运行分析电机运行特性电机启动与制动电机调速方法1.3.4 变压器的运行与维护变压器的运行原理变压器的保护变压器的维护与检修第2章自动控制原理2.1 控制系统概述控制系统是电气工程及其自动化领域的重要组成部分,其主要任务是实现特定对象的输出量随时间或输入量的变化而满足预定的功能指标。
2013年电气工程师发输变电专业案例考试真题上午卷
2013年电气工程师发输变电专业案例考试真题上午卷案例题,是4选1的方式,各小题前后之间没有联系。
共25道小题,每题分值为2分,上午卷50分,下午卷50分,试卷满分100分。
案例题一定要有分析(步骤和过程)、计算(要列出相应的公式)、依据(主要是规程、规范、手册),如果是论述题要列出论点1、根据以下资料,回答1-3题某工厂拟建一座110kV终端变电站,电压等级110/10kV,由两路独立的110kV电源供电。
预计一级负荷10MW,二级负荷35MW,三级负荷10MW。
站内设两台主变压器,接线组别为YNDL1。
110kV采用SF6断路器,110kV母线正常运行方式为分列运行。
10kV侧采用单母线分段接线,每段母线上电缆出线8回,平常长度4km。
未补偿前工厂内负荷功率因数为86%,当地电力部门要求功率因数达到96%。
请回答下列问题。
说明该变电站主变压器容量的选择原则和依据,并通过计算确定主变压器的计算容量和选择的变压器容量小值应为下列哪组数值?( )A.计算值34MVA,选40MVAB.计算值45MVA,选50MVAC.计算值47MVA,选50MVAD.计算值53MVA,选63MVA2、假如主变压器容量为63MVA,Ud%=16,空载电流为1%。
请计算确定全站在10kV侧需要补偿的容性无功容量应为下列哪项数值?( )A.8966kvarB.16500kvarC.34432kvarD.37800kvar3、若该电站1OkV系统中性点采用消弧线圈接地方式,试分析计算其安装位置和补偿容量计算值应为下列哪一选项?(请考虑出线和变电站两项因素)( )A.在主变压器1OkV中性点接人消弧线圈,其计算容量为249kVAB.在主变压器10kV中性点接入消弧线圈,其计算容量为289kVAC.在1OkV母线上接人接地变压器和消弧线圈,其计算容量为249kVAD.在10kV母线上接人接地变压器和消弧线圈,其计算容量为289kVA4、根据以下资料,回答4-6题某室外220kV变电站,地处海拔1000m以下,其高压配电装置的变压器进线间隔断面图如下。
电气配线作业指导书
电气配线作业指导书1目的为了加强规范特殊施工过程控制,确保电气配线施工质量,指导电气配线作业施工,特制定本作业指导书。
2适用范围本作业指导书适用于工业与民用建筑电气配线工程施工。
3编制依据G B50171-2012《电气装置安装工程盘、柜及二次回路接线施工及验收规范》G B50300-2013《建筑工程施工质量验收统一标准》G B50303-2015《建筑电气工程施工质量验收规范》G B T50397-2007《冶金电气设备工程安装验收规范》Y B9239-92《冶金电气设备安装工程质量检验评定标准》4过程控制内容人员资格参与本过程施工的电工应持“电工作业安全操作证”上岗。
机械、机具、设备机械设备有电动压接钳、手动液压压接钳、电锯等。
主要工具有手工锯、剥线刀、电工刀、斜口钳、剥线钳、手压压线钳、套筒扳手、活动扳手、螺丝刀等。
作业条件电气设备盘、柜安装应经验收合格。
电气盘、柜下方电缆走线架已安装固定好,电缆已整理绑扎好。
对照电缆表,校核盘、柜内进出电缆的编号、型号、规格,均应符合设计要求。
盘、柜内端子板应固定牢靠、无损坏,绝缘良好。
材料电线、电缆的芯线连接金具规格应与芯线的规格适配,且不得采用开口端子。
工艺、操作要领施工工艺流程图(见附图1)按照配线图施工,接线准确无误。
电缆引入盘内应排列整齐、避免交叉、走向合理。
电缆在柜内固定应牢固,不能使盘内端子板受到机械应力。
电缆自柜内底板向上100m m处开剥,剥开后填充物应去除,线芯应回开无绞绕,剥口处用黑胶布缠绕。
电缆标识根据业主和监理单位要求,可采用张贴纸制电缆标签或电缆挂牌的形式纸制电缆标签用油性笔(有条件时采用计算机打印)注明电缆编号、始终端设备名称或编号及电缆规格型号,自电缆剥开处向下10~15m m用透明胶布包在电缆上,标签向外。
电缆挂牌宜采用椭圆形塑料牌,用油性笔写明电缆编号、始终端设备名称或编号及电缆规格型号。
再用棉绳绕挂在电缆剥开后黑胶布缠绕处。
2013年9月份考试电气安全第二次作业
2013年9月份考试电气安全第二次作业一、单项选择题(本大题共30分,共 6 小题,每小题 5 分)1. 在相同条件下,多次测量同一量时,误差大小和符号均保持恒定,或按某种规律变化的一种误差,称其为:()。
A. 随机误差 B. 系统误差 C. 相对误差 D. 绝对误差2. 电涌保护器的动作时限,一般应小于()。
A. 5ns B. 25ns C. 25ms D. 1s3. IT系统中发生一次接地故障时一般不要求切断电源,系统仍可继续运行,此时应由绝缘监视装置发出接地故障信号。
当发生二次异相接地(或碰壳)故障时,若故障设备本身的过电流保护装置不能在规定时间内动作,则应装设()切除故障。
A. 隔离变压器 B. 空气开关 C. 剩余电流保护电器(RCD)D. 阻抗继电器4. 当电源线路上出现过电流或过电压时,电涌保护器快速响应模块呈现()电阻特性,泄漏电流很大。
A. 零 B. 高 C. 低 D. 50Ω5. 室外变配电装置与建筑物的间距一般不应小于12~40m;与爆炸危险场所建筑物的间距不应小于30m;与易燃和可燃液体储罐的间距不应小于25~90m;与液化石油气罐的间距不应小于40~90m。
油浸式变压器应有单独的变压器室,和变配电所内其他房间之间应有防火隔离措施,必要时应加防火墙。
A. 30m B. 25~90m C. 40~90m D. 12~40m6. IT系统内用以监测单相接地故障,采用的电击防护电器有()。
A. 过电流防护电器 B. 绝缘监测器 C. 低压断路器 D. 剩余电流保护电器即RCD二、多项选择题(本大题共30分,共 5 小题,每小题 6 分)1. 测量误差的表示方法包括:()。
A. 随机误差 B. 系统误差 C. 相对误差 D. 绝对误差2. 在我国,关于高层建筑的界限规定也未完全统一。
根据行业标准JGJ3-1991《钢筋混凝土高层建筑结构设计与施工规程》规定,下列钢筋混凝土民用建筑,()层的属于高层建筑。
《电气控制与PLC应用》大作业(最终定稿)
电气控制与PLC应用大作业院系:机械工程学院班级:姓名:任课教师:完成时间:2013/12/18一、运料小车延时自动往复行程控制控制要求:运料小车起动后自动在a、b两地之间往复运行。
运行到b地装货20秒,运行到a地卸货15秒。
小车可在a、b两地之间任意处起动或停车,并可向任意方向运行。
控制电路设计要求如下:(1)、设计出完整的电气原理图和继电器接触控制线路图;(2)、设计出采用S7-200实现的PLC控制程序。
设计方案如下:1、电气控制原理图2、PLC控制接线图如下3、PLC的输入/输出点分配图如下:4、PLC控制梯形图二、三台三相异步电动机 M1、M2、M3,控制要求如下:(1)、按下启动按钮SB1时,电动机M1先启动,过10s后M2启动,再过10s后M3启动;(2)、按下停止按钮SB2时,电动机M3先停止,过10s后M2停止,再过10s后M1停止;设计方案如下:1、电气控制原理图2、PLC控制电路接线图3、PLC的I/O分配表4、梯形图三、通过编程实现跑马灯程序。
当I0.0输入高电平时,输出指示灯从Q0.0至Q0.7依次循环点亮;各指示灯点亮的间隔均为1.5s设计方案如下:1、PLC控制电路接线图2、PLC的I/O分配表3、梯形图四、三相异步电动机Y—Δ降压启动控制题目:(1)、设计出完整的电气原理图和继电器接触器控制线路图;(2)、设计出采用循环顺序方式实现的S7—200控制程序;设计方案如下:1、电气控制原理图2、PLC控制电路接线图3、PLC的I/O分配表4、循环顺序控制状态流程示意图5、梯形图五、某液压系统的控制要求如下所示(1)、试按逻辑设计法设计及其电器控制线路(2)、试编制采用S7-200PLC实现系统控制的程序要求全自动运行,每次工作循环之间停留时间为5S设计方案如下:1、根据上述动作状态图可画出逻辑关系图2、上图中运算原件的逻辑式如下KM1=(SB1*KM3+KM1)*SQ2KM2=(SQ1+KM2)SQ5*KM3=(SQ1+KM2)*(SQ5+KM3)KM3=(SQ2*SQ3+KM3)*SQ4 YA1=KM1 YA2=KM2 YA3=KM3 3、根据逻辑式画出电器原理图4、PLC控制电路接线图5、、PLC的I/O分配表6、梯形图。
10-绝缘子(支柱绝缘子)安装施工作业指导书
样板示范内容:绝缘子(支柱绝缘子)安装2013 年示范工程样板点施工作业指导书绝缘子(支柱绝缘子)安装目录1.适用范围 (3)2.编写依据 (3)3.作业流程 (3)4.安全风险分析与控制措施 (4)5.作业准备 (5)6.作业方法 (6)7.工艺质量控制措施及检验标准 (7)8.工艺成品要求 (10)9.成品展示 (10)样板示范内容:绝缘子(支柱绝缘子)安装1.适用范围本作业指导书适用于110~500kV 电压等级的绝缘子(支柱绝缘子)安装作业,其他电压等级可参照执行。
2.编写依据表2-1 编写依据序号引用资料名称1GB 50150—2006《电气装置安装工程电气设备交接试验标准》2GB 50149—2010《电气装置安装工程母线装置施工及验收规范》;3GB 26860—2011《电力安全工作规程(发电厂和变电站电气部分)》4D L5009.3—1997《电力建设安全工作规程(变电所部分)》5Q/C S G 10001—2004《变电站安健环设施标准》6Q/C S G 10007—2004《电力设备预防性试验规程》7《10kV~500kV 输变电及配电工程质量验收与评定标准第二册:变电电气安装》8Q/C S G11105.2—2008《南方电网工程施工工艺控制规范》9《中国南方电网公司反事故措施》生2012[71]号3.作业流程作业(工序)流程见图3-1。
图3-1 作业(工序)流程图4.安全风险分析与控制措施4.1绝缘子(支柱绝缘子)安装作业前,施工项目部根据该项目作业任务、施工条件,参照《电网建设施工安全基准风险指南》(下简称《指南》)开展针对性安全风险评估工作,形成该任务的风险分析表。
4.2按《指南》中与绝缘子(支柱绝缘子)安装作业相关联的《电网建设安全施工作业票》(附件1 安全施工作业票编码:B DD Q-Z W-05-01/01),结合现场实际情况进行差异化分析,确定风险等级,现场技术员填写安全施工作业票,安全员审核,施工负责人签发。
[工程类试卷]2013年注册电气工程师供配电(专业案例)下午真题试卷及答案与解析
![[工程类试卷]2013年注册电气工程师供配电(专业案例)下午真题试卷及答案与解析](https://img.taocdn.com/s3/m/5efb21dd1a37f111f1855bfe.png)
2013年注册电气工程师供配电(专业案例)下午真题试卷及答案与解析一、案例分析题0 某变电所设一台400kV.A动力变压器,U d%=4,二次侧单母线给电动机负荷供电,其中一台笼型电动机额定功率P=132kW,额定电压380V,额定电流240A,额定转速1480r/min,cosφed=0.89,额定效率0.94,启动电流倍数6.8,启动转矩倍数1.8,接至电动机的沿桥架敷设的电缆线路电抗为0.024511,变压器一次侧的短路容量为20MV.A,母线已有负荷为200kV.A,COSφn=0.73。
请回答下列问题。
1 计算电动机启动时母线电压为下列哪一项数值?(忽略母线阻抗,仅计线路电抗) ( )2 若该低压笼型电动机具有9个出线端子,现采用延边三角形降压启动,设星形部分和三角形部分的抽头比为2: 1,计算电动机的启动电压和启动电流应为下列哪组数值? ( )3 若采用定子回路接入对称电阻启动,设电动机的启动电压与额定电压之比为0.7,忽略线路电阻,计算每相外加电阻应为下列哪一项数值? ( )4 若采用定子回路接入单相电阻启动,设电动机的允许启动转矩为1.2M st,忽略线路电阻,计算流过单相电阻的电流应为下列哪一项数值? ( )5 当采用自耦变压器降压启动时,设电动机启动电压为额定电压的70%,允许每小时启动6次,电动机一次启动时间为12s,计算自耦变压器的容量应为下列哪一项数值? ( )二、案例分析题每题的备选答案中,有一个或多个符合题意。
错选,本题不得分;少选,所选的每个选项得0.5分。
5 某110/10kV。
变电所,变压器容量为2×25MV.A,两台变压器一台工作一台备用,变电所的计算负荷为17000kV.A,变压器采用室外布置,10kV设备采用室内布置。
变电所所在地海拔高度为2000m,户外设备运行的环境温度为-25~45°C,且冬季时有冰雪天气,在最大运行方式下10kV母线的三相稳态短路电流有效值为20kA(回路总电阻小于总电抗的三分之一),请回答下列问题。
电气工程作业(答案)

专业概论(电气工程类) ----------------1. 电气工程专业的性质是什么?有何特点?电气工程及其自动化专业主要是研究电能的产生、传输、转换、控制、储存和利用的专业。
近几十年来,有关电能的转换、控制在该专业所占的地位日益重要,专业名称中的“及其自动化”就反映了科学技术的这种发展和变化。
电气工程是从人们对电磁现象的研究开始,电磁理论是电气工程的理论基础,而电磁理论是从物理学中的电学和磁学逐步发展而形成。
人类社会发展到任何时候也离不开能源,能源是人类永恒的研究对象,电能是利用最为方便的能源形式。
以电能为研究对象的电气工程及其自动化专业有十分强大的生命力。
电气工程及其自动化专业是一个工程性很强的专业,正是因为电气工程的发展,才能有庞大的电力工业,人类才不可逆转地进入伟大的电气化时代。
本专业主要特点是强弱电结合、机电结合、软件与硬件结合、元件与系统结合,具有交叉学科的性质,电力、电子、控制、计算机多学科综合,使毕业生具有较强的适应能力,是宽“ 口径”专业。
强调实践性,专业领域的实践性很强,要求从业人员有较高的动手操作能力和较好的空间思维能力。
与数学、物理等自然科学联系紧密,在专业的学习过程中,要求掌握比较深入的物理和数学知识,具有良好的的分析、计算和空间想象能力。
不断发展和创新,专业知识技术更新快。
新型材料、新的加工工艺制作方法不断涌现,新的行业标准也在适时调整。
前景灿烂,半个世纪以来,我国的电气工程专业得到了很大的发展,已经建立了较完善的学科体系,在学科前沿研究、技术创新和工程应用、国民经济服务诸方面取得了突出成就。
未来电气工程科学发展的总趋势将是交叉、综合化、数字、智能化、高效化和集成化这些发展方向,并将拓宽到生物系统、光子学,微机电系统等领域, 21 世纪中的某些最重要的新装置、新系统和新技术将来自这些领域。
2. 电气工程专业的研究领域有哪些?结合你目前的工作情况谈谈在该领域电气工程的研究现状及发展情况。
电气工程-2014作业 专业2
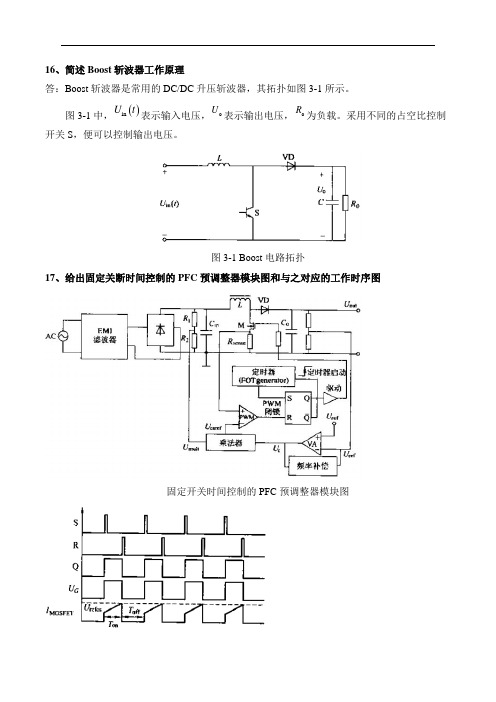
16、简述Boost斩波器工作原理答:Boost斩波器是常用的DC/DC升压斩波器,其拓扑如图3-1所示。
图3-1中,()inU t表示输入电压,oU表示输出电压,oR为负载。
采用不同的占空比控制开关S,便可以控制输出电压。
图3-1 Boost电路拓扑17、给出固定关断时间控制的PFC预调整器模块图和与之对应的工作时序图固定开关时间控制的PFC预调整器模块图工作时序及相关波形18、结合电路图,说明固定关断时间控制的原理。
答:误差放大器(V A)将预调整器输出电压out U 的采样与参考电压ref U 进行比较并且产生一个误差信号c U 。
c U 正比于两者之差,反馈到乘法器的一个人口,并与整流输人电压mult U 的采样相乘。
乘法器的输出口是一个经过整流的正弦波scref U ,幅值正比于mult U 和c U 的幅值,它是PWM 的正弦参考电压。
scref U 反馈到比较器的反向输入端,正向输入端接入感应电阻sence R 上的电压,此电压正比于M 开通时流过开关管M 和电感L 的电流。
当这两个电压相等时,比较器复位PWM 锁存器和M ,此时M 将被关断。
因此scref U 决定流过M 和电感L 的峰值电流。
因为scref U 是整流后的正弦波,电感峰值电流也将成为整流正弦的形状 PWM 锁存器输出端Q 接上升沿触发定时器,在一个预设定的时间off T 以后置位 PWM 锁存器,以此开通M 并开始另一个开关周期。
如果off T 不能使电感电流降为零,系统将工作在CCM 。
19、给出直接电流控制配合电网电压前馈的并网逆变器电流控制框图,并说明其原理。
工作原理:假设实际的并网电流q i 、d i 大于给定值,则两者比较后的偏差为正,PI 输出器的输出将不断增大,参考电压的幅值也越来越大,从而导致并网电流增大。
该过程将导致并网电流q i 、d i 逐渐接近 给定值,PI 调节器的输出将保持动态恒定。
2013年注册电气工程师(供配电)专业知识上午真题及答案解析

第23题
户外配电装置中的穿墙套管、支持绝缘子,在承受短路引起的荷载短时作用时,其设计的安全系数不应小于下列哪个数值?______
A.4
B.2.5
C.2
D.1.67
上一题下一题
(24/40)单项选择题
(每题的备选答案中,只有1个最符合题意)
第24题
某医院18层大楼,预计雷击次数为0.12次/年,利用建筑物的钢筋作为引下线,同时建筑物的钢筋、钢结构等金属物连接在一起、电气贯通,为了防止雷电流流经引下线和接地装置时产生的高电位对附近金属物或电气和电子系统线路的反击,金属物或线路与引下线之间的距离要求中,下列哪一项与规范要求一致?______
A.根据对供电可靠性的要求及中断供电在政治、经济上所造成损失或影响的程度
B.根据中断供电后,对恢复供电的时间要求
C.根据场所内人员密集程度
D.根据对正常工作和生活影响程度
上一题下一题
(6/40)单项选择题
(每题的备选答案中,只有1个最符合题意)
第6题
某35kV架空配电线路,当系统基准容量取100MV·A、线路电抗值为0.43Ω时,该线路的电抗标么值应为下列哪一项数值?______
A.20
B.5
C.0.2
D.0.002
上一题下一题
(11/40)单项选择题
(每题的备选答案中,只有1个最符合题意)
第11题
成排布置的低压配电屏,其长度超过6m时,屏后的通道应设两个出口,并宜布置在通道两端,在下列哪种条件下应增加出口?______
A.当屏后通道两出口之间的距离超过15m时
B.当屏后通道两出口之间的距离超过30m时
A.在进线总配电箱近旁安装接地母排,汇集诸联结线
2013注册电气工程师发输变电真题及答案
上午(1) BCDDB CABBD DABCD CBCCB BCDBC(2) DBCC? CAA?D DABCC CB?A? DCDDC(3) ABADD, 6C, 7A, 8A, 9B, 10B, 11D, 12D, 13D, 14C, 15 B, 16C, 17B, 18C, 19A, 20B, 21B, 22C, 23D, 24B, 25C下午(1)1-3BCA;5B;14B;17-21CDAAC;23-25CCB;27C;28D;30-36BCCDBB D;38-40AAB(2)1B 2C 3A 5B 14C 15B 16C 17C 18B 19A 20A 21B 22D 27C 2 8D 29D 30B 31C 32B 33C 34D 36D 38A 39C 40B(3)1B 2C 3A 5B 9A 12C 14A 16C 18D 20D 21B 23A 25 C 27B 28D 29C 31C 32B 33D 34D 36D 38C 40B(4)1B 2C 3A 5B 14B 17C 18D 19A 20A 21C 23C 24C 25 B 27C 28D 30B 31C 32C 33D 34B 35B 36D 38A 39A 40B上午1、110主变容量确定 S>=(35+10)/0.86 = 52.32MVA ,这个看是用补偿前的功率因数还是补偿后的,补偿前的是D,补偿后的是B2、无功补偿容量计算应该是负荷和变压器补偿加一起,好像是C 其他的题想不起来了。
电气一次手册有公式3、消弧线圈容量4、220高压配电距离,判断错误5、小弧垂6、电缆感应电压7、接触、跨步电位差判断入地电流8、避雷器额定电压9、热稳定计算接地线截面10、避雷针11、直流电压降求导线面积12、控制、信号回路断路器额定电流13、短路电流14、蓄电池出口回路断路器额定电流15、放电装置断路器额定电流16、计算母线短路电流17、计算L3末端短路电流18、计算校验灵敏度时用的短路电流19、电流互感器倍数20、三相重合闸21、60m塔用爬电比距法算片数22、3000m海拔计算片数23、给电抗和电納求雷电流24、杆塔接地电阻25、操作过电压风速 15m/s下午案例(题目顺序肯定是记不住了):1. 并联电抗器容量选择(80km双回线路、0.41Mvar/km的充电功率、全部在本站补偿)B:2X30Mvar2. 20kV发电机出口避雷器额定电压以及持续运行电压的选取。
2013年电气工程师发输变电专业案例考试真题下午卷
2013年电气工程师发输变电专业案例考试真题下午卷案例题,是4选1的方式,各小题前后之间没有联系,共40道小题。
选作25道。
每题分值为2分,上午卷50分,下午卷50分,试卷满分100分。
案例题一定要有分析(步骤和过程)、计算(要列出相应的公式)、依据(主要是规程、规范、手册),如果是论述题要列出论点。
1、根据以下资料,回答1-5题5号、6号发电机采用发电机变压器组接入330kV配电装置,主变压器参数为360MVA,330/20kV,Ud=16%。
当330kV母线发生三相短路时,计算由一台300MW机组提供的短路电流周期分量起始值接近下列哪项数值? ( )A.1.67KaB.1.82kAC.2.00kAD.3.54kA2、若该企业110kV电网全部并列运行,将导致ll0kV系统三相短路电流(41kA)超出现有电气设备的额定开断能力,请确定为限制短路电流,下列哪种方式为安全合理经济?并说明理由。
( )A.断开I回与330kV主系统的联网线B.断开110kV母线Ⅰ、Ⅱ段与Ⅲ、Ⅳ段分段断路器C.断开110kV母线Ⅲ、Ⅳ段与Ⅴ、Ⅵ段分段断路器D.更换110kV系统相关电气设备3、如果330kV并网线路长度为80km,采用2 x400mm2导线,同塔双回路架设,充电功率为0.41Mvar/km,根据无功平衡要求,330kV三绕组变压器的35kV侧需配置电抗器。
若考虑充电功率由本站全部补偿,请计算电抗器的容量为下列哪项数值? ( )A.1 230MvarB.2 230MvarC.3 X30MvarD.2 X60Mvar4、若正常运行方式下,110kV的短路电流为29.8kA,10kV母线短路电流为18kA,若10kV 母线装设无功补偿电容器组,请计算电容器的分组容量应取下列哪项数值? ( ) A.13.5MvarB.10MvarC.8MvarD.4.5Mvar5、本企业电网110kV母线接有轧钢类钢铁负荷,负序电流为68A,若110kV母线三相短路容量为1282MVA,请计算该母线负序电压不平衡度为下列哪项数值? ( ) A.0.61%B.1.06%C.2%D.6.10%6、根据以下资料,回答6-9题某火力发电厂工程建设4×600MW机组,每台机组设一台分裂变压器作为高压厂用工作变压器,主厂房内设2段10kV高压厂用工作母线,全厂设2段10kV公用母线,为4台机组的公用负荷供电。
电气安装作业指导书
篇一:电气安装作业指导书一.、适用范围:本作业指导书仅适用于淄博泰维6万吨/年润滑油安装工程电气安装工程。
二、编制依据:1、淄博泰维润滑油有限公司提供的山东汇智工程设计有限公司设计的电气施工图2、设计院设计要求的标准图集及规范。
3、《建筑电气工程施工质量验收规范》gb50303-2002。
4、《电气装置安装工程爆炸及火灾危险环境电气装置施工及验收规范》gb50257-965、《电气装置安装工程接地装置施工及验收规范》。
gb50169-20066、《电气装置安装工程电缆线路施工及验收规范》。
gb50168-20067、《电气装置安装工程旋转电机施工及验收规范》。
gb50171-20068、《电气装置安装工程盘柜及二次回路接线施工及验收规范》。
9、《电气装置安装工程电气设备交接试验标准》。
gb50150-2006 10、gb50259-94工业安装工程质量检验评定统一标准。
11、我公司现行管理手册,程序文件及支持性文件。
12、《淄博泰维6万吨/年润滑油项目施工组织设计》。
三、作业人员的资格及技能本安装工程设电气技术员一名,负责技术方面的指导、监督以及协调;安全员一名,负责施工方面的安全监督;调试技术员一名,电气安装人员数名及其他人员分别负责吊装,焊接,测量等工作,各岗位持证上岗,负责各方面的工作。
见下表劳动力计划:四、施工机主要施工机具一览表:五、作业条件施工作业必须具备的条件1、施工现场必须做到“三通一平”的要求。
2、框架楼板施工完毕,不得渗漏;预留孔符合设计要求,预埋件要牢固。
3、施工图纸完善。
4、业主联系设计院进行三方图纸会审,对发现的问题进行解释。
5、材料、设备已到货,并经开箱检验,验收合格。
6、相应施工人员已经过技术交底。
7、施工人员已经过相应技术培训。
六、施工工艺方法及技术参数(一)电缆管安装施工工艺:熟悉图纸-核对管径与电缆是否匹配-管线定位-弯头预制-支架安装-穿线管安装本工程图纸会审时所有电气穿线管变更为热镀锌钢管安装遵循以下几点:1、电缆管预埋应配合土建,做到预埋及时,位置正确,走向合理,特别应注意避免和工艺管道及工业水沟直接交叉。
2013哈工大继续教育作业题答案——电气工程
省专业技术人员继续教育知识更新培训电气工程专业2013年作业一.填空:1、常见的交流调速方法有:(降电压调速)(转差离合器调速)(转子串电阻调速)(绕线转子电动机串级调速和双馈电动机调速)(变极对数调速)(变压变频调速)。
2、按照交流异步电机的原理,从定子传入转子的电磁功率可分成两部分:一部分是(拖动负载的有效功率),称作(机械功率);另一部分是(传输给转子电路的转差功率)。
3、从能量转换的角度上看,转差功率是否增大,是消耗掉还是得到回收,可以把异步电机的调速系统分成三类:(转差功率消耗型调速系统);(转差功率馈送型调速系统);(转差功率不变型调速系统)。
4、转差功率消耗型调速系统的全部转差功率都转换成(热能消耗在转子回路中)。
在恒转矩负载时,该调速系统是以增加(转差功率)的消耗来换取(转速)降低的。
属于这一类的三种调速方法有:(降电压调速)(转差离合器调速)(转子串电阻调速)。
5、在转差功率馈送型调速系统中,除转子铜损外,大部分转差功率在转子侧通过(变流装置)馈出或馈入,转速越低,(能馈送的功率越多);属于这一类的调速方法是(绕线转子电动机串级调速和双馈电动机调速)。
6、在转差功率不变型调速系统中,转差功率只有(转子铜损),而且无论转速高低,转差功率(基本不变),因此效率(更高);属于此类的调速方法有(变极对数调速)和(变压变频调速)这两种。
二:问题答1、对于恒转矩负载,为什么调压调速的调速范围不大?电动机机械特性越软,调速范围越大吗?答:带恒转矩负载工作时,普通笼型异步电动机降压调速时的稳定工作范围为0<s<sm,sm本来就不大,因此调速范围也不大。
降压调速时,机械特性变软,但sm不变,故调速范围不变。
2、异步电动机变频调速时,为何要电压协调控制?在整个调速范围内,保持电压恒定是否可行?为何在基频以下时,采用恒压频比控制,而在基频以上保持电压恒定?答:因为定子电压频率变化时,将导致气隙磁通变化,影响电动机工作。
厦门理工学院电气工程基础作业答案

1.如图所示的系统中各元件参数如下:发电机G:S N = 30MV A,V N = 10.5kV,X G*=0.27变压器T-1:S N = 31.5MV A,k T-1 = 10.5/121,V S% = 10.5变压器T-2:与T-3参数相同:S N = 15MV A,k T-1 = 110/6.6,V S% = 10.5线路L每回:l=100km,x = 0.4Ω/km电抗器R:V N = 6kV,I N = 1.5kA,x R% = 6以100MV A为基准容量,各电压等级的平均额定电压为基准电压,并近似认为各元件的额定电压等于平均额定电压,请计算图中各设备参数的标幺值2.有一台型号为SFSL-31500/110的三相三绕组变压器,额定变比为110/38.5/11,容量比为100/100/66.7,空载损耗80kW,短路试验测得P s(1-2)=450kW,P s(2-3)=270kW,P s(1-3)=240kW,V S(1-2)%=11.55,V S(2-3)%=8.5,V S(1-3)%=21,请计算变压器归算到高压侧的参数1. 在220/380三相四线制线路上,接单相电热干燥箱4台,其中2台10kW 接于A 相,1台30kW 接于B 相,1台20kW 接于C 相。
另有380V 单相对焊机4台,2台14kW (ε=100%)接于AB 间,1台20kW (ε=100%)接于BC 间,1台30kW (ε=60%)接于CA 间。
若取同时系数0.9,试对本线路进行负荷计算(P 、Q 、S 、I )。
解:参考例题对CA 相间的对焊机进行暂载率转换323.24e NP P ===kw将接于相间的单相负荷转化为接于相电压的单相负荷,查P18表1-12得对焊机的功率因数为0.7,再查下表中规定的系数功率换算系数负荷功率因数0.35 0.4 0.5 0.6 0.650.7 0.8 0.9 1.0 PAB-A PBC-B PCA-C1.27 1.17 1.0 0.89 0.840.8 0.72 0.64 0.5PAB-B P BC-C P CA-A-0.27 -0.17 0 0.11 0.160.2 0.28 0.36 0.5QAB-AQBC-BQCA-C1.05 0.86 0.580.38 0.3 0.220.09 -0.05 -0.29QAB-AQBC-BQCA-A1.63 1.44 1.160.96 0.880.8 0.67 0.53 0.28P eA=pAB-A P AB+pCA-A P CA=0.8×14×2+0.2×23.24=27.05kW Q eA=qAB-A P AB+qCA-A P CA=0.22×14×2+0.8×23.24=24.75kvarP eB =p BC-B P BC +p AB-B P AB =0.8×20×1+0.2×14×2=21.6kWQ eB =q BC-B P BC +q AB-B P AB =0.22×20×1+0.8×14×2=26.8kvar P eC =p CA-C P CA +p BC-C P BC =0.8×23.24+0.2×20×1=22.59kW Q eC =q CA-C P CA +q BC-C P BC =0.22×23.24+0.8×20×1=21.11kvar 而电热箱功率因数为1,故而不消耗无功 P A = 10*2 = 20 kw P B = 30*1 = 30 kw P C = 20*1 = 20 kw各相总负荷 P A Σ = k*(P eA +P A ) =0.9*(27.05+20)= 42.34 ; Q A Σ = 0.9*24.75 = 22.28 P B Σ = k*(P eB +P B ) = 0.9*(21.6+30) = 46.44 ; Q B Σ = 0.9*26.8 = 24.12 P C Σ = k*(P eC +P C ) = 0.9*(22.59+20) = 38.33 ; Q C Σ = 0.9*21.11 = 19 B 相负荷最大故而P e Σ = P B Σ*3 = 46.44*3 = 138.32 kw ;Q e Σ = Q BE = 24.12*3 = 72.36 kvar S = (P 2e Σ + Q 2e Σ)0.5 = 157 kV A I = S/1.732/0.38 = 238.52 A1.某机修车间采用TN-S系统380V三相供电,车间内动力设备都是三相设备,包括铣床30台(小批量),5.5kW/台,鼓风机10台,2kW/台,电焊机10台,3kW/台,εN=64%。
13年电气参考答案+文档
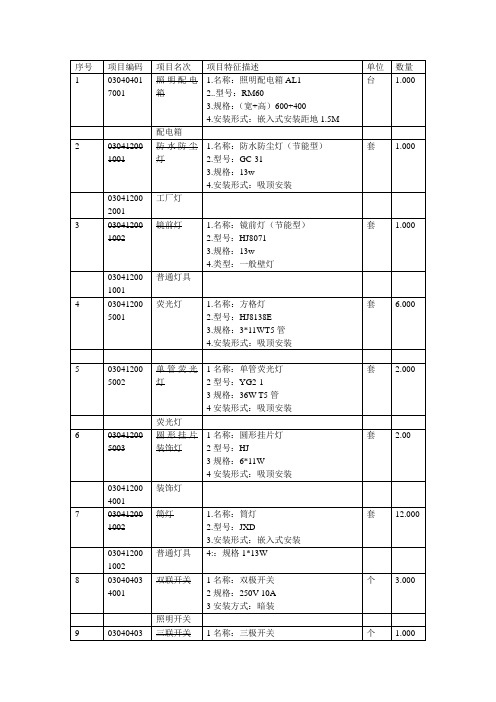
序号项目编码项目名次项目特征描述单位数量1 030404017001 照明配电箱1.名称:照明配电箱AL12..型号:RM603.规格:(宽+高)600+4004.安装形式:嵌入式安装距地1.5M台 1.000 配电箱2 030412001001 防水防尘灯1.名称:防水防尘灯(节能型)2.型号:GC-313.规格:13w4.安装形式:吸顶安装套 1.000030412002001工厂灯3 030412001002 镜前灯 1.名称:镜前灯(节能型)2.型号:HJ80713.规格:13w4.类型:一般壁灯套 1.000030412001001普通灯具4 030412005001 荧光灯 1.名称:方格灯2.型号:HJ8138E3.规格:3*11WT5管4.安装形式:吸顶安装套 6.0005 030412005002 单管荧光灯1名称:单管荧光灯2型号:YG2-13规格:36W T5管4安装形式:吸顶安装套 2.000 荧光灯6 030412005003 圆形挂片装饰灯1名称:圆形挂片灯2型号:HJ3规格:6*11W4安装形式:吸顶安装套 2.00030412004001装饰灯7 030412001002 筒灯 1.名称:筒灯2.型号:JXD3.安装形式:嵌入式安装套12.000030412001002普通灯具4::规格1*13W8 030404034001 双联开关1名称:双极开关2规格:250V 10A3安装方式:暗装个 3.000 照明开关9 03040403三联开关1名称:三极开关个 1.0004002 2规格:250V 10A3安装方式:暗装照明开关10 030404035001 插座1名称:单项5孔插座(安全型)2规格:250V 10A3:安装方式:暗装个19.00011 030404031001 插座1名称:单项3孔插座(安全型)2规格:250V 20A3:安装方式:暗装个 4.0000304040350021名称:电热水器插座(安全型) 1.00012 030411001001 配管1名称:电气配管2材质:钢质3规格:DN504配置形式:暗配m 20.06 1名称:钢管25.213 030411001002 配管1名称:塑料管2材质:1刚性阻燃管3规格:DN204配置形式:暗配m 192.8126.0014 030411001002 配管1名称:塑料管2材质:1刚性阻燃管3规格:DN254配置形式:暗配m 192.8113.715 030408001001 电力电缆1名称:电力电缆2型号:YJV-0.6KV/1KA V3规格:4*25+1*164材质:铜芯5敷设方式、部位:穿管埋地6电压等级:1kvm 5.25.816 030411004001 配线1名称:电气配线2配线形式:管内穿线3:型号:BV4规格:2.55材质:铜芯m 418.101名称:管内穿线2配线形式:照明线路6配线部位:墙面、地下暗配7线制:三线297.117 030411004002 配线1名称:电气配线2配线形式:管内穿线3:型号:BV4规格:45材质:铜芯m 290.201名称:管内穿线2配线形式:照明线路6配线部位:墙面、地下暗配7线制:三线348.1018 035050003001 前端机柜1:名称电视前端箱2:规格200+100个 1.00台19 030502004001 电视插座1名称:电视插座2:安装费是:暗装3终端调试个 3.000 3底盒:PVC 86H20 射频同轴电缆0304110040031名称:射频同轴电缆2规格:SYWV-75-53敷设方式:穿管敷设m 25.0103050500500125.721 031103025001 电话分线箱1规格:200+1002种类:分线箱3容量:10对个 1.00003050200 3001 分线接线箱盒4:安装方式:暗装22 030502004002 电话插座1名称:电视插座2:安装费是:暗装个 3.00023 030411004004 电话线1:名称:电话线2:规格HBVV-2*0.53:对数:1对4:敷设方式:穿管敷设m 26.02030502005001双绞线缆24 030502001001 机柜、机架1:名称:网络分线箱2:规格:200+1003:安装方式:壁挂式安装台 1.00025 030502010001 配线架1名称:网络配线架2:规格12口个 1.00003110101900126 03050200网络插座1名称:网络插座个 3.0004003 2类别:八位模块3规格:双扣4:安装方式:壁装5:底盒材质:PVC 86H 030502012001信息插座4:安装方式:暗装27 030411004005 网络线1名称:超五类线缆2对数:4对3:敷设方式:管内敷设m 26.02030502005002双绞线缆28 0305020200001 网络双绞线缆测试1:测试类别:超五类2:测试内容:链路系统测试点 3.00003050201 900129 040504001001 手孔砌筑1名称:电缆手孔井2:规格:800*800*12003类型:砼个 2座30 030411006001 接线盒1:名称:接线盒2:材质:PVC3:规格:86H4:安装形式:暗装个6031 030404035003 插座1名称:挂机空调插座(安全型)2规格:250V 20A3安装方式:暗装个 1.00032 030404035004 插座1名称:柜机空调插座(安全型)2规格:250V 20A3安装方式:暗装个 2.00033 030408006001 电力电缆头1名称:电力电缆头2型号:热缩电缆头3规格:4*25+1*164材质:聚乙烯4安装部位:配电箱内5电压等级:06KV/1KV个 1.00名称计算式数量DN50 2.5+0.8+1.5+3*(4.5*0.8*1.5)25.2PC20 强电=(2+3+2+1.5+2+7+4.5+6+5+8+4.5+3.5+8.5+3+2+6.5+1+6.5+3*1.7+0.5+3*0.9)+1.7+2.5弱电=0.9+0.9+5.5+0.1+1.3+0.1+1.3+0.1+1.3+0.1+1.3+5+4+8+3.5+4+9*0.4 89.00+ 37.=12 6.PC25 3.5+1+9.5+0.5+0.9+0.7+2.5+3+9.5+0.5+0.1+7*0.4+3.5+5.5+0.5+0.1+2.4+0.9+0.4+0.1+4+4+5.5+5.5+0.1+13*0.4+4+0.4+0.1+7.5+4.5+3.5+5.5+0.1+11*0.4+7*1.5113.7BV2.5 3*84.8+4*4.2+3.*7.3+4*1 297.1 BV4 113.7*3+7*1 348.1 电缆 2.5+0.8+1.5+1 5.81小题:可以成立。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
黑龙江省专业技术人员继续教育知识更新培训电气工程专业2013年作业说明:初级职称学员“专业课作业一”为填空题1-6题;“专业课作业二”为问答题1-3题。
中、高级职称学员“专业课作业”为问答题全部;同时提交3000字左右“学习心得”一篇。
所有学员均需按要求提交“公需课作业”。
作业提交时间:以网站通知为准。
一.填空:1、常见的交流调速方法有:(降电压调速)(转差离合器调速)(转子串电阻调速)(绕线电机串级调速或双馈电机调速)(变极对数调速)(变压变频调速)。
2、按照交流异步电机的原理,从定子传入转子的电磁功率可分成两部分:一部分是(拖动负载的有效功率),称作(机械功率);另一部分是(传输给转子电路的转差功率,与转差率S成正比)。
3、从能量转换的角度上看,转差功率是否增大,是消耗掉还是得到回收,可以把异步电机的调速系统分成三类:(转差功率消耗型调速系统);(转差功率馈送型调速系统);(转差功率不变型调速系统)。
4、转差功率消耗型调速系统的全部转差功率都转换成(热能消耗在转子回路中)。
在恒转矩负载时,该调速系统是以增加(转差功能)的消耗来换取(转速)降低的。
属于这一类的三种调速方法有:(降电压调速)(转差离合器调速)(转子串电阻调速)。
5、在转差功率馈送型调速系统中,除转子铜损外,大部分转差功率在转子侧通过(变流装置)馈出或馈入,转速越低,(能馈送的功率越多);属于这一类的调速方法是(绕线转子电动机串级调速和双馈电动机调速)。
6、在转差功率不变型调速系统中,转差功率只有(转子铜损),而且无论转速高低,转差功率(基本不变),因此效率(更高);属于此类的调速方法有(变极对数调速)和(变压变频调速)这两种。
二:问题答1、对于恒转矩负载,为什么调压调速的调速范围不大?电动机机械特性越软,调速范围越大吗?答:带恒转矩负载工作时,普通笼型异步电动机降压调速时的稳定工作范围为0〈s〈sm,sm本来就不大,因此调速范围也不大。
降压调速时,机械特性变软,但sm不变,故调速范围不变。
2、异步电动机变频调速时,为何要电压协调控制?在整个调速范围内,保持电压恒定是否可行?为何在基频以下时,采用恒压频比控制,而在基频以上保持电压恒定?答:因为定子电压频率变化时,将导致气隙磁通变化,影响电动机工作。
在整个调速范围内,若保持电压恒定,则在基频以上时,气隙磁通将减少,电动机将出力不足;而在基频以下时,气隙磁通将增加,由于磁路饱和励磁电流将过大,电动机将遭到破坏。
因此保持电压恒定不可行。
在基频以下时,若保持电压不变,则气隙磁通增加,由于磁路饱和,将使励磁电流过大,破坏电动机,故应保持气隙磁通不变,即保持压频比不变,即采用恒压频比控制;而在基频以上时,受绕组绝缘耐压和磁路饱和的限制,电压不能随之升高,故保持电压恒定。
3、异步电动机变频调速时,基频以下和基频以上分别属于恒功率还是恒转矩调速方式?为什么?所谓恒功率或恒转矩调速方式,是否指输出功率或转矩恒定?若不是,那么恒功率或恒转矩调速究竟是指什么?答:在基频以下调速,采用恒压频比控制,则磁通保持恒定,又额定电流不变,故允许输出转矩恒定,因此属于恒转矩调速方式。
在基频以下调速,采用恒电压控制,则在基频以上随转速的升高,磁通将减少,又额定电流不变,故允许输出转矩减少,因此允许输出功率基本保持不变,属于恒功率调速方式。
恒功率或恒转矩调速方式并不是指输出功率或输出转矩恒定,而是额定电流下允许输出的功率或允许输出的转矩恒定。
4、分析电流滞环跟踪PWM控制中,环宽h对电流波动与开关频率的影响。
答:电流跟踪控制的精度与滞环的环宽有关,当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增大了。
这是一对矛盾的因素,实用中,应在充分利用器件开关频率的前提下,正确地选择尽可能小的环宽。
5、按基频以下和基频以上分析电压频率协调的控制方式,画出:(1)恒压恒频正弦波供电时异步电动机的机械特性。
(2)基频以下电压-频率协调控制时异步电动机的机械特性。
(3)基频以上恒压变频控制时异步电动机的机械特性。
(4)电压频率特性曲线()U=f f6、在转速开环变压变频调速系统中需要给定积分环节,论述给定积分环节的原理和作用。
答:转速开环变压变频调速是依据交流电动机稳态数学模型,按照电压频率协调控制方式来保持气隙磁通恒定,需要电动机运行满足稳态条件要求,不能快速变化,所以要用给定积分器限制起动和制动的速率。
7、结合异步电动机三相原始动态模型,讨论异步电动机非线性、强耦合和多变量的性质,并说明具体体现在哪些方面?答:异步电动机具有非线性、强耦合和多变量的性质,要获得良好的调速性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
矢量控制和直接转矩控制是两种基于动态模型的高性能交流电动机调速系统。
矢量控制系统通过矢量变换和按转子磁链定向,得到等效直流电动机模型,然后按照直流电动机模型设计控制系统;直接转矩控制系统利用转矩偏差和定子磁链幅值偏差的符号,根据当前定子磁链矢量所在的位置,直接选取合适的定子电压矢量,实施电磁转矩和定子磁链的控制。
8、旋转变换的等效原则是什么?当磁动势矢量幅值恒定、匀速旋转时,在静止绕组中通入正弦对称的交流电流,而在同步旋转坐标系中的电流为什么是直流电流?如果坐标系的旋转速度大于或小于磁动势矢量的旋转速度时,绕组中的电流是交流量还是直流量?答:两相同步旋转坐标系的突出特点是,当三相ABC坐标系中的电压和电流是交流正弦波时,变换到dq坐标系上就成为直流。
9、坐标变换(3/2变换和旋转变换)的优点何在?能否改变或减弱异步电动机非线性、强耦合和多变量的性质?答:在三相静止绕组A、B、C和两相静止绕组α、β之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称 3/2 变换,变换前后总功率不变。
通过坐标变换,可以使之降阶并化简,不能改变其非线性、多变量的本质。
10、论述矢量控制系统的基本工作原理,矢量变换和按转子磁链定向的作用,等效的直流机模型,矢量控制系统的转矩与磁链控制规律。
答:在三相坐标系上的定子交流电流i A、i B 、i C ,通过三相/两相变换可以等效成两相静止坐标系上的交流电流iα、iβ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流i m 和i t 。
控制使交流电机的转子总磁通Φ r 就是等效直流电机的磁通,则M绕组相当于直流电机的励磁绕组,i m 相当于励磁电流,T 绕组相当于伪静止的电枢绕组,i t 相当于与转矩成正比的电枢电流。
模仿直流电机的控制策略,得到直流电机的控制量,经过相应的坐标反变换,就能够控制异步电机了。
现在d轴是沿着转子总磁链矢量的方向,并称之为 M(Magnetization)轴,而q 轴再逆时针转90°,即垂直于转子总磁链矢量,称之为T(Torque)轴。
这样的两相同步旋转坐标系就具体规定为M,T 坐标系,即按转子磁链定向(Field Orientation)的坐标系。
定子电流的励磁分量与转矩分量是解耦的。
要实现按转子磁链定向的矢量控制系统,很关键的因素是要获得转子磁链信号,以供磁链反馈和除法环节的需要。
开始提出矢量控制系统时,曾尝试直接检测磁链的方法,一种是在电机槽内埋设探测线圈,另一种是利用贴在定子内表面的霍尔元件或其它磁敏元件。
采用间接计算的方法,即利用容易测得的电压、电流或转速等信号,利用转子磁链模型,实时计算磁链的幅值与相位。
利用能够实测的物理量的不同组合,可以获得多种转子磁链模型。
11、转子磁链计算模型有电压模型和电流模型两种,分析两种模型的基本原理,比较各自的优缺点。
答:根据定子电流和定子电压的检测值来估算转子磁链,所得出的模型是电压模型。
采用电压模型法,由于存在电压积分问题,结果在低速运行时,模型运算困难。
根据描述磁链与电流关系的磁链方程来计算转子磁链,所得出的模型是电流模型,采用电流模型法时,由于存在一阶滞后环节,在动态过程中难以保证控制精度。
12、讨论直接定向与间接定向矢量控制系统的特征,比较各自的优缺点,磁链定向的精度受哪些参数的影响?答:直接转矩控制系统:简称 DTC ( Direct Torque Control) 系统,是继矢量控制系统之后发展起来的另一种高动态性能的交流电动机变压变频调速系统。
在它的转速环里面,利用转矩反馈直接控制电机的电磁转矩,矢量控制系统(Vector Control System),进行坐标变换的是电流(代表磁动势)的空间矢量,通过坐标变换实现的控制系统。
13、分析与比较按转子磁链定向和按定子磁链定向异步电动机动态数学模型的特征,指出它们的相同点与不同点。
答:按转子磁链定向同步旋转坐标系mt中的数学模型与直流电动机的数学模型完全一致。
通过坐标系旋转角速度的选取,简化了数学模型,通过按转子磁链定向,将定子电流分解为励磁分量smi和转矩分量sti,使转子磁链rψ仅由定子电流励磁分量smi产生,而电磁转矩eT正比于转子磁链和定子电流转矩分量的乘积striψ,实现了定子电流两个分量的解耦。
而按定子磁链定向将定子电压分解为两个分量sdu和squ,sdu控制定子磁链幅值的变化率,squ控制定子磁量矢量旋转角速度,再通过转差频率控制定子电流的转矩分量sqi,最后控制转矩。
但两者均受到定子电流两个分量sdi和sqi的影响,使受电流扰动的电压控制型。
14、分析定子电压矢量对定子磁链与转矩的控制作用,如何根据定子磁链和转矩偏差的符号以及当前定子磁链的位置选择电压空间矢量?转矩脉动的原因是什么?抑制转矩脉动有哪些方法。
答:以正转(T*e > 0)的情况为例当实际转矩低于T*e 的允许偏差下限时,按磁链控制得到相应的电压空间矢量,使定子磁链向前旋转,转矩上升。
当实际转矩达到T*e 允许偏差上限时,不论磁链如何,立即切换到零电压矢量,使定子磁链静止不动,转矩下降。
稳态时,上述情况不断重复,使转矩波动被控制在允许范围之内。