驳接爪力学分析
果蔬采摘欠驱动机械手爪设计及其力控制
Design and Force Control of an Underactuated Robotic Hand for Fruit and Vegetable Picking
JIN Bo LIN Longxian
(The State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310007)
+ θα1 = θ 1 h1 θα = h1 + l1 2
再建立一个转换矩阵 Jω,使得 θ = J ω
Abstract:To achieve non-destructive fruit and vegetable picking, an end-actuator with a simpler and more versatile structure is designed based on underactuated principle. The underactuated mechanism refers to machine that has fewer drivers compared with the number of degrees of freedom. The robotic hand designed by adopting the underactuated principle is simpler and more reliable. Due to simple structure and better adaptability to shape of objects, the robotic hand can fold the object completely with its fingers. Non-destructive harvesting is achieved by using a closed-loop force-feedback control algorithm which controls the maximum contact forces. Based on this design idea, a three-finger gripper which is driven by only one motor is designed. Through theoretical analysis, mechanism design and modeling, and structural optimization, the final model size is determined and physical production is completed. A control circuit combined with force-feedback control is designed for grasping experiments. The experimental results show that the robotic hand can achieve the desired grasping function, maximum contact force control and has such features as simple and reliable control, stable grasping and non-damaging. Key words:fruit and vegetable picking;robotic hand;underactuated;grasping experiments;maximum contact force control
胶接技术中力学问题浅谈
胶接技术中力学问题浅谈提起“胶接”,不少人可能不以为然,那不简单吗?用胶水把信封封口贴封起来,用乳胶把木板粘接成一个盒子,用502胶把开裂的皮鞋恢复一新,如此等等而已,难道还有高深的科学问题吗?当然,这些日常生活中的“胶接”活儿只要细心些就ok了。
但是你知道吗?在许多高新制造工艺中也离不开胶接技术,其中就涉及到不少的力学问题呢!一般而言,“胶接”专指一种用胶黏剂来实现构件连接和固持的方法。
它是焊接、铆接、螺栓连接等传统机械连接方法的重要补充,在机械、建筑、电子、航空航天等领域均占有十分重要的地位。
与其它连接形式相比较,胶接具有如下优点:•胶接采用的胶黏剂密度较小,可以有效地降低连接件的重量,满足构件的轻质的要求;•采用胶接手段时不需要在构件上预留孔洞,从而避免构件在使用过程中由于应力集中而产生破坏,延长构件的使用寿命;•胶接在工艺上更加简便,更易实现。
最初人类用的胶黏剂大多为天然橡胶,随着现代高分子化工的飞速发展,新型合成胶黏剂不断涌现,使得粘结技术取得了重大进展。
比如硅橡胶、聚氨酯橡胶、异戊橡胶等都是合成胶粘剂。
与天然胶黏剂相比较,合成胶黏剂的品种更多,它们具有更强的胶接强度、更好的耐久性和更广的适用性。
在高新技术中,胶黏剂在实际使用过程中除了要实现构件结合这个基本的功能以外,还需要满足一些特定的功能,例如用来实现密封、绝热、导电、吸能减振等等。
这样就促使了各种用途的专业胶黏剂的产生和发展,其中应用最为广泛的胶黏剂被称为结构胶,这类胶黏剂的特点是:具有高模量和高强度,能够有效的传递应力并承担结构载荷。
按照力学的术语:•“应力”是指由于载荷、温度、湿度等因素引起物体内部某一点处单位截面上的内力,也就是受力物体截面上内力的集度;•“强度”指材料在外力作用下抵抗永久变形和断裂的能力;•“模量”在一般情况下是指弹性模量,即材料在弹性变形阶段时应力和应变比值。
从这里,我们就不难看出,胶接技术的确和力学有不解之缘呢!如上所说,通过结构胶的使用,可以有效地实现各种构件的结合。
驳接爪的装置办法和承重量

不是很安全,可能干脆放弃了幕墙的建筑。而为 了更好的帮助到大家,我们按照一些简单的例 子,来对这个驳接爪能够承重多少公斤的问题, 进用驳接爪所连接而成的玻璃幕
墙,能够很好的承受一个人的重量。而关于这个
问题的答案,在经过专业人士的分析之后,有了 清晰的解释。在解答这个问题之前,我们首先要 了解玻璃的情况,而这个问题中的钢化玻璃为十 二厘米。正常的答案是可以进行承重,但是受力
对于玻璃来说,如果想要集中更大的应力,则建
议使用钢化玻璃。如果想要达到一定的隔音效
果,则建议选择带有夹层的玻璃。而对于驳接爪
来说,一定要在了解荷载是多少之后,找到相应
事实证去了
的能够承重的产品。就目前的市场情况来看,不 锈钢材质的驳接爪受到了广泛的青睐。这种驳接 爪不仅受力性更强,而且使用寿命也很长久,具 有诸多的使用价值。 驳接爪,幕墙配件,大理石挂件
必须小于就是公斤每平方厘米。从这个角度来
说,也就是在进行一切换算的时候,都应该了解
相应的以及基本标准。但是在这道问题中,由于
没有提高驳接爪的承重情况,所以还是一种理想
事实证明,木子是对的。袁慕野去了木子那里最好的高中,一年后,木子也去了
状态的评估。以 200 系列驳接爪举例,一千克承 重一百五十千克的玻璃,一点三五千克承重两百 千克玻璃,一点六千克承重两百五十千克玻璃。 在这样的情况下,如果还需要人为的进行踩踏检
修,为了保证幕墙的安全性。建议在玻璃的下面
进行减震块的添加,并且建议采用夹胶玻璃。这
样做的目的,是为了防止玻璃的自爆,会更加安
全一些。之所以会出现类似题目的问题,从根本
的情况来讲,是因为在建筑玻璃幕墙的时候,一 定要考量到安全系数问题。而这个安全系数不仅 对玻璃本身的情况有所要求,而且对驳接爪以及 等等的玻璃幕墙配件,都有着标准的条件要求。
不锈钢驳接爪国家标准
不锈钢驳接爪国家标准不锈钢驳接爪是一种常见的连接件,广泛应用于建筑、机械、航空航天等领域。
为了保证不锈钢驳接爪的质量和安全性,国家相关部门制定了一系列的国家标准,以规范不锈钢驳接爪的生产和使用。
本文将对不锈钢驳接爪国家标准进行详细介绍和解读。
首先,不锈钢驳接爪国家标准主要包括产品分类、技术要求、检验方法、标志、包装、运输、贮存等内容。
其中,产品分类是指根据不同的用途和结构特点,将不锈钢驳接爪分为不同的类别,并对每个类别的技术要求和检验方法进行详细规定。
这有助于生产企业和用户根据实际需要选择合适的不锈钢驳接爪,并对其质量进行检验和评定。
其次,不锈钢驳接爪国家标准对产品的技术要求进行了严格规定,包括材料、尺寸、表面处理、力学性能、化学成分等方面。
这些技术要求的制定,旨在确保不锈钢驳接爪具有良好的耐腐蚀性、强度和可靠性,能够在各种恶劣环境下稳定运行,确保使用安全。
此外,不锈钢驳接爪国家标准还对产品的检验方法进行了详细描述,包括外观检查、尺寸测量、力学性能测试、化学成分分析等。
这些检验方法的规定,有助于生产企业对不锈钢驳接爪进行质量控制,确保产品符合国家标准的要求,提高产品质量和可靠性。
不锈钢驳接爪国家标准还对产品的标志、包装、运输、贮存等方面进行了规定,以确保产品在生产、运输、储存和使用过程中不受损坏,保持良好的状态,为用户提供优质的产品和服务。
总的来说,不锈钢驳接爪国家标准的制定和实施,对于规范不锈钢驳接爪的生产和使用,保障产品质量和安全性,促进行业的健康发展,具有重要的意义。
生产企业和用户应当严格遵守国家标准的要求,加强质量管理,提高产品质量,确保不锈钢驳接爪能够稳定、安全、可靠地运行,为社会经济发展做出积极贡献。
总之,不锈钢驳接爪国家标准的制定和实施,对于规范不锈钢驳接爪的生产和使用,保障产品质量和安全性,促进行业的健康发展,具有重要的意义。
希望本文能够对不锈钢驳接爪国家标准有所了解,并且能够引起大家对产品质量和安全性的重视,共同为行业的发展贡献力量。
胶管接头扣压成型的力学分析_杨务滋
#60#化工设备与管道第41卷1前言冷连接技术中,以胶管连接最为普遍。
接头与胶管连接形式有两种:扣压式和可拆式。
扣压式胶管接头结构简单、使用可靠、外形尺寸小、加工方便,采用扣压机进行扣压。
扣压式胶管接头压缩量大小,直接影响着接头连接性能。
这种扣压式胶管组合件是不可拆卸的固定管接头结构,这种结构能在橡胶层和接头间形成很大的夹紧力,接头的密封是由胶管的内胶层借助于外套和芯子使内胶层变形来完成的。
连接强度是利用直接加压外套使胶管得到一定的压缩量,从而紧固编织层(或缠绕层)的钢丝来保证的。
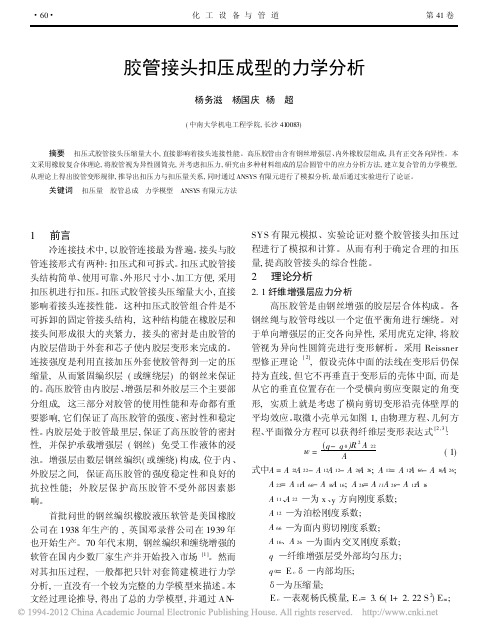
高压胶管由内胶层、增强层和外胶层三个主要部分组成,这三部分对胶管的使用性能和寿命都有重要影响,它们保证了高压胶管的强度、密封性和稳定性。
内胶层处于胶管最里层,保证了高压胶管的密封性,并保护承载增强层(钢丝)免受工作液体的浸浊。
增强层由数层钢丝编织(或缠绕)构成,位于内、外胶层之间,保证高压胶管的强度稳定性和良好的抗拉性能;外胶层保护高压胶管不受外部因素影响。
首批问世的钢丝编织橡胶液压软管是美国橡胶公司在1938年生产的,英国邓录普公司在1939年也开始生产。
70年代末期,钢丝编织和缠绕增强的软管在国内少数厂家生产并开始投入市场[1]。
然而对其扣压过程,一般都把只针对套筒建模进行力学分析,一直没有一个较为完整的力学模型来描述。
本文经过理论推导,得出了总的力学模型,并通过AN-SYS有限元模拟、实验论证对整个胶管接头扣压过程进行了模拟和计算。
从而有利于确定合理的扣压量,提高胶管接头的综合性能。
2理论分析2.1纤维增强层应力分析高压胶管是由钢丝增强的胶层层合体构成。
各钢丝绳与胶管母线以一个定值平衡角进行缠绕。
对于单向增强层的正交各向异性,采用虎克定律,将胶管视为异向性圆筒壳进行变形解析。
采用Reissner 型修正理论[2],假设壳体中面的法线在变形后仍保持为直线,但它不再垂直于变形后的壳体中面,而是从它的垂直位置存在一个受横向剪应变限定的角变形,实质上就是考虑了横向剪切变形沿壳体壁厚的平均效应。
驳接爪性能外形以及安装时需要考虑因素

建筑结构和装饰效果的需要。部分驳接爪件采用
球铰连接,具有吸收变形能力,在安全性上也有 很大的保障。 驳接爪常规外形:四爪,三爪,两爪 90 度,
两爪 180 度,长单爪,短单爪, K 型爪,工字爪……
总是希望有人压着做事,希望有人带头。我们抗拒着成长,抗拒着独立
驳接头是应用于幕墙工程中的一项重要设 备,使玻璃在风压作用下可以自由弯曲,采用这 种安装方式,在玻璃厚度相同时,它可以比完全
刚性联接,能安装更大面积的玻璃幕墙。把经过
特殊处理的安全玻璃用驳接件安装到一个开放 空间内的轻钢承重结构上。通常驳接头穿过玻 璃,将玻璃固定在钢结构上,其特点驳接爪是玻
总是希望有人压着做事,希望有人带头。我们抗拒着成长,抗拒着独立
1ca0f0cc3 www.ffsf3f.pw
共存的,所有类型的承重结构都能用。他们或者
总是希望有人压着做事,希望有人带头。我们抗拒着成长,抗拒着独立
是玻璃板筋、金属竖框、空间结构、隐形结构, 存在着许多可能的承重结构。该结构设计考虑到 玻璃和施加负荷的限制,防止产生使玻璃有破裂
倾向的变形。有很多因素可使结构变形:强大的
风压、玻璃自重、屋顶积雪、热膨胀、清洗设备 的负荷、建筑物晃动。 驳接爪,幕墙配件,大理石挂件
璃安装形式既不象明框幕墙玻璃那样安装在框总是希望有人压着做事,希望源自人带头。我们抗拒着成长,抗拒着独立
中再与建筑主体相联接,也不象隐框幕墙玻璃那 样用结构胶粘在铝框上。 由于安装后玻璃孔部周围的应力是相当大
的,因此在驳接系统中使用的玻璃必须是经过特
殊处理的钢化或钢化层玻璃。玻璃上所钻孔的形 式根据所选驳接件的形式分为直孔和锥孔两种。 一般来讲,只要该结构变形与系统不是不能
欠驱动手指分析与结构优化
(2.3)
式中:ϕ2n−1 是固定值;θn 是输入;只有θn+1 和ϕ2n 是未知的,由上面的两个方程可以解
28
第二章 欠驱动手指分析与结构优化
出两个未知数。
将关系式(2.3)对时间取导数,这时ϕ2n−1 对时间取导后为 0,θn 杆为输入,角速
度为整理后:
⎡−an sinθn+1
⎢ ⎣
an
cosθn+1
ϕ2n
G1 O1
l1 ϕ1 b1
ac
ω1 c1
θ1
Fcϕ12
y
lϕ
Fs
图 2.5 欠驱动手指运动单元矢量封闭形
下面对手指关节和物体接触的过程进行运动学分析。为了简便计算,以推杆 l 为 x 坐标轴,垂直于推杆 l 为 y 坐标轴,建立如图 2.5 所示的坐标系,对于四边形
{an , bn , ln , cn} 构成的矢量封闭形,可以得到以下的关系式:
欠驱动手指机构是由可变构形的四边形机构和最后一个刚性三角形结构组成的。
欠驱动手爪的基本的结构和受力单元模型,如图 2.2 所示。
Fn dn
Fn−1
lnϕ+12n+1yn+1cn+1 ϕ2n+2 an θn+1 bn+1
ln yn cn
ϕ2n−1 bn
ϕ2n
an−1 θn
ln−1
cn−1
图 2.2 欠驱动手爪的结构和受力单元模型
θ1 = A−1B = v sin ϕ a sin(θ1 − ϕ )
(2.12)
θ n+1 = En E1v sin ϕ a sin(θ1 − ϕ )
(2.13)
同样,按照相同的步骤,可以推导出ϕ2n 。
驳接爪

驳接爪玻璃幕墙是由驳接头、驳接爪、转接件等组件组成,驳接爪主要作为支承驳接头,并传递荷载作用到固定的支撑结构体系上,是连接玻璃幕墙的一个重要配件。
用途:驳接爪在玻璃幕墙中就起到了衔接的作用,通过驳接头将荷载传递给钢结构或其他主体结构上,它的力学性能在此显得尤为重要。
性能说明:使用驳接爪连接的玻璃幕墙外观通透,由于无墙体,采光好,可使室内空间和室外环境融合。
驳接爪支承结构多样,可满足不同建筑结构和装饰效果的需要。
部分驳接爪件采用球铰连接,具有吸收变形能力,在安全性上也有很大的保障。
专业生产不锈钢建筑五金,不锈钢车船五金等配件。
专业生产幕墙五金,建筑五金,车船五金等配件。
栏杆玻璃驳接爪解析

端串上橡胶条,注意有些要在现场做,如胶条的
角边封口,铝框角边的密封。竖向打胶要形成一 个坡度,使其遇水时,立刻排掉。
二、点爪窗的施工安装要求:
在商品写字楼的点爪窗安装步骤如下: 一组是:支座→支撑杆→曲柄→密封材料
另一组是:框架件→玻璃上装点爪杆→将玻
慕野讲一句话,不知道讲什么,真的。但是那次也并不是没有什么收获,至少木
3玻璃框的设计wwwtzzrzfcom通常开启窗所选用的固定框多为铝合金框包括扇框和边框扇框是与开启玻璃粘合在一起的边框是与骨架相连的它们之间必须用胶或垫块嵌条将玻璃嵌固于铝框中这种方式显然不适用于点爪玻璃我们必须用另一种框架来支撑点爪玻璃即用圆钢框架
栏杆玻璃驳接爪解析
一、驳接爪式开启窗系统的组成及特点: 1、玻璃的选用
以及凸轮功能的完全发挥。 3、安装密封材料: 铝合金框用双面胶条固定于固定玻璃的周
慕野讲一句话,不知道讲什么,真的。但是那次也并不是没有什么收获,至少木
边,并用结构胶完全粘住,注意该处结构胶不作
结构传递用,可以在现场打胶。密封条串入铝合 金槽后,四角边均须封口。
4、安装框架件和玻璃安装:
框架件、爪头和玻璃均可在七厂组装一体运 至工地。框架运输时,和铝窗产品一样须用保护 纸保护好,不让其受损。组装后,尽量保证相邻 对角线误差小于 2.0mm。爪头与框架须保证垂直,
装上推杆,将每一扇推杆通杆连杆连在一起,一
般根据马达的最大矩,可带动一排的几扇窗来设 置的。通过电动马达,开动一排窗。如果将窗安
装在 1 米左右的高度,还可以手动开启。 6、开启窗的密封
点爪玻璃窗的密封就变得简单易做,即将铝 合金衬条组框后固定在开启窗周边的固定玻璃 上,但需留出滴水和排水槽口。铝合金衬条另一
驳接爪驳接件的特点应用及基本分类

的驳接玻璃设备。其实现在很多的不锈钢驳接爪 建筑当中都会使用幕墙,下面针对驳接玻璃的特
征介绍一下: 空间结构
驳接玻璃是把经过特殊处理的安全玻璃用 驳接件安装到一个开放空间内的轻钢承重结构 上。通常驳接头穿过玻璃,将玻璃固定在钢结构
上,其特点是玻璃安装形式既不象明框幕墙玻璃
V 型驳接系统的驳接头前端突出于玻璃的外 表面,有较好的抗风力能力。(2)S 型驳接系统的
驳接头前端与玻璃外表面平齐,其抗负风力的能
力略逊于 V 型驳接系统。 驳接玻璃 由于安装后玻璃孔部周围的应力是相当大
慕野讲一句话,不知道讲什么,真的。但是那次也并不是没有什么收获,至少木
的,因此在驳接系统中使用的玻璃必须是经过特
重作用。
明框玻璃幕墙是最传统的形式,应用最广
泛,性能可靠。相对于隐框玻璃幕墙,更易满足 施工技术水平要求。[1]隐框玻璃幕墙 隐框玻璃幕墙 隐框玻璃幕墙的金属框隐蔽在玻璃的背面,
慕野讲一句话,不知道讲什么,真的。但是那次也并不是没有什么收获,至少木
室外看不见金属框。隐框玻璃幕墙又可分为全隐
框玻璃幕墙和半隐框玻璃幕墙两种,半隐框玻璃 幕墙可以是横明竖隐,也可以是竖明横隐。隐框
成的漏气中空玻璃保温性能与隔音性能比较好,
中空玻璃玻璃开孔后孔边需要密封以防止漏气, 但目前仍无专用的中空玻璃驳接孔涂胶设备,必
须手工操作手工操作除效率低之外,密封质量也
不易保证。如发生漏气,就会导致中空玻璃的中 间层结水雾。国内外点支式中空玻璃漏气的现象 时有发生,是一件令人头痛的事。如果采用无孔 式驳接方式,此类现象就会大为减少。
1.成本低
开孔式玻璃板块在开孔时,驳接爪必须采用 先进驳接爪的工艺与设备,玻璃加工成本较高。
夹芯复合材料∕钢板胶接接头力学特性

夹芯复合材料∕钢板胶接接头力学特性夹芯复合材料/钢板胶接接头力学特性夹芯复合材料和钢板胶接接头都是新型的材料,它们具有轻质、高强度、耐腐蚀、耐疲劳等特点,在工程应用中得到了广泛的应用。
本文将重点探讨这两种材料的力学特性。
夹芯复合材料(honeycomb composite)夹芯复合材料由两层薄皮和一层蜂窝状芯层(honeycomb core)构成。
这种材料的轻质、高强度和优良的机械性能使它成为一种广泛应用于空气航天、船舶、汽车、建筑等领域的复合材料。
夹芯复合材料的力学特性与材料的组成、结构、制造工艺等因素有关。
一般而言,夹芯复合材料的弹性模量高、材料耐久性强、自重轻,在单向或多向受力时都具有出色的强度表现。
随着夹芯复合材料在工程中的不断应用和研究,其力学性能和工艺水平也不断提高。
目前,夹芯复合材料已经可以生产出高强度、高温度、高耐久性、低热膨胀系数的复合材料,可以满足不同领域的需要。
钢板胶接接头(steel adhesive joint)钢板胶接接头是一种新型的钢结构连接方式,它与传统的焊接、螺栓连接方式相比具有更好的机械性能、可靠性和安全性。
钢板胶接接头是通过将两个钢板粘合在一起,形成一种强力的结构连接方式。
钢板胶接接头的强度、刚度和耐久性与胶接剂(adhesive)种类、粘接面积、接头几何形状等因素密切相关。
在合适的条件下,钢板胶接接头的强度能够达到焊接接头的强度。
尽管钢板胶接接头在许多方面具有优越性,但是它也有一些缺陷,例如需要定期检查胶水状况,以确保粘合层的完整性。
此外,在高温环境下,粘合层的性能会受到影响,这也是其在某些特殊条件下失效的原因之一。
结论夹芯复合材料和钢板胶接接头是两种新型的材料,在工程应用中得到了广泛的应用。
它们的力学特性取决于材料的组成、结构、制造工艺等因素。
夹芯复合材料具有优良的强度和刚度表现,钢板胶接接头则具有更好的机械强度、可靠性和安全性。
在选择材料时,应根据实际情况进行综合考虑,选择最适合自己需要的材料。
动物驱动足摩擦学特性研究及仿生设计
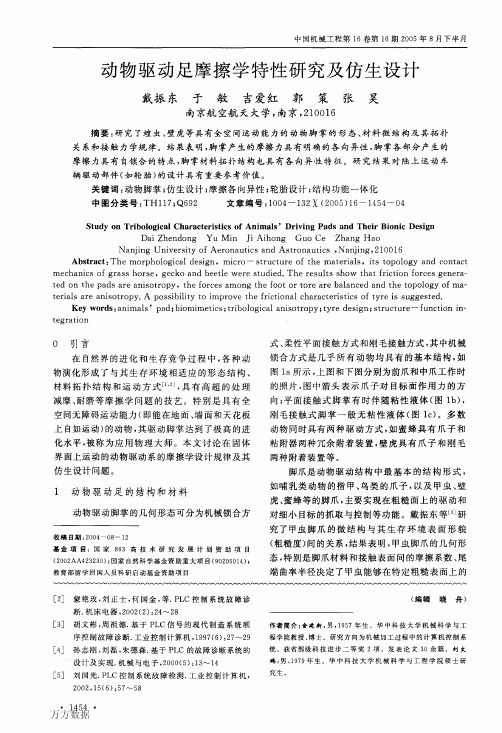
动物驱动足摩擦学特性研究及仿生设计——戴振东 于 敏 吉爱红等
性的影响。驱动接触面的材料拓扑结构研究有待 于深入开展。
图6猎豹脚掌形态
图7仿生轮胎的设计
器人的设计和步态规划,以保证运动过程中机器 人的重心在接触足所形成的三角形以内,但将机 器人的接触脚掌常常简单地处理为点接触或具有 自适应随动关节的平面接触,如钱晋武等口胡研制 了多足爬壁机器人的脚掌机构,未深入研究高附 着力的脚掌设计问题。对这一问题的深入研究将 对机器人的稳定、灵活和机动等性能具有重要 意义。
摩擦力具有自锁合的特点,脚掌材料拓扑结构也具有各向异性特征。研究结果对陆上运动车
辆驱动部件(如轮胎)的设计具有重要参考价值。
关键词:动物脚掌;仿生设计;摩擦各向异性;轮胎设计;结构功能一体化
中图分类号:THll7;Q692
文章编号:1004—132X(2005)16—1454一04
Study on Tribological Characteristics of Animals’Driving Pads and Their Bionic Design Dai Zhendong Yu Min Ji Aihong Guo Ce Zhang Hao
(1)动物在接触面内的切向力具有自锁合和 冗余约束的特点,这是动物实现稳定附着和快速 机动运动的重要条件。陆上运动车辆的设计能够 从中获得启示,以便提高车辆运动的可靠性。
脚爪是动物驱动结构中最基本的结构形式, 如哺乳类动物的指甲、鸟类的爪子,以及甲虫、壁 虎、蜜蜂等的脚爪,主要实现在粗糙面上的驱动和 对细小目标的抓取与控制等功能。戴振东等[3]研 究了甲虫脚爪的微结构与其生存环境表面形貌 (粗糙度)间的关系,结果表明,甲虫脚爪的几何形 态,特别是脚爪材料和接触表面间的摩擦系数、尾 端曲率半径决定了甲虫能够在特定粗糙表面上的
基于ANSYS的幕墙驳接件静力分析
基于 ANSYS的幕墙驳接件静力分析摘要:点支撑玻璃幕墙其承载性能研究通常采用驳接件与玻璃分开进行分析,本文从驳接件层次分析,其核心是要求驳接件有绝对的安全性及受力不变形的特点。
驳接爪横向要承受一定的风压,纵向要承受玻璃的重量和自身重量,在这些力的作用下,爪臂会产生横向和纵向的弯曲变形。
本文以六角爪为例,从理论和实际出发,计算和测试了驳接爪受力时产生的变形情况,并将理论与试验结果进行了对比分析,可为工程设计提供理论参考。
关键词:ANSYS;静力分析;驳接件一、引言随着社会的不断发展和科技的不断进步,玻璃幕墙得到越来越广泛的应用。
其中点支承玻璃幕墙和其他玻璃幕墙一样,是在生产实践中不断发展和完善的,随着玻璃物理性能的提高和玻璃技术的发展,围绕着玻璃作为建筑的外围护结构出现了三种结构形式:首先是明框玻璃幕墙,其次是隐框玻璃幕墙,最后就是点支承玻璃幕墙。
在建筑空间的通透质量上,传统的明框或隐框玻璃幕墙在室内都能看到结构体组成的框,这些分割体阻挡了光线和视线。
玻璃工艺的长足发展使人们自然会想到更多地利用玻璃透明的特性从而引发了点支承玻璃幕墙技术的产生。
点支承玻璃幕墙对支承结构和连接结构的设计,要求结构的表面积最小化,对视线的影响降至最低,因而具有其他形式不可代替的优点——更通透、更安全、更灵活,使建筑的现代工艺美、技术美得以尽情地表现。
因此,点支承玻璃幕墙受到广大建筑师的青睐,并得到快速发展。
二、工程概况:1、工程简介:幕墙标高:11.800m。
基本风压: (50年一遇)地面粗糙度类别:C类抗震设防烈度:8度设计基本地震加速度:玻璃结构:玻璃板块:材料:转接件,驳接爪,驳接头2、荷载计算:按标高11.800m,角部区域计算风压:(1)风荷载计算值:风荷载设计值:单块玻璃承受风荷载:(2)玻璃自重计算玻璃重力密度:玻璃面积:玻璃重量:(3)地震荷载计算:动力放大系数,取5.0:水平地震影响系数最大值,本工程抗震设防烈度:8度,地震加速度0.20。
玻璃幕墙逐渐成为时尚起到防热的效果驳接爪
也只能够补偿一个方向的变形。
5.中空玻璃铝环 6.z 系列转接件 7.拉杆、拉
索.
驳接爪在我国的建筑当中,需要根据不同的 环境进行选择,于是我国南方炎热的夏季,人们 希望室内比较凉爽,不锈钢驳接爪建筑物的热工 设计追求冷房效果,以减少空调的制冷负担,节 约能源和运行费用,人也感到自然、舒适。
慕野讲一句话,不知道讲什么,真的。但是那次也并不是没有什么收获,至少木
索支撑式。
单索幕墙分单向索和单层索网两种单索幕
墙是靠拉索受荷载厚的变形来产生抵抗荷载的 能力。单索幕墙索的变形量较大,驳接爪而固定
在所上的玻璃为脆性材料无法产生长度方向的
变量。是靠玻璃间胶缝变化来适应所的变化。如 果采用驳接爪和驳接头固定玻璃时,由于玻璃孔 和驳接头间被固定,同时在驳接头和驳接爪紧固 后也无法相对移动,因此无法让玻璃间产生相对 移动。在拉索变形到一定程度后会造成玻璃不能
以其结构轻巧、美观、抗震性好等优点被大范围
推广,在设计过程中一般按下列顺序进行。根据
建筑结构考虑幕墙的受力体系,幕墙主要承受的 荷载为风荷载、重力荷载、地震作用和温度作用。
重力荷载一般是悬挂在幕墙上部,既竖向杆(索)
来承担幕墙重力荷载,重力荷载一般为恒定荷 载,这种拉杆(索)称为承重杆(所)。风荷载 为可变荷载,在设计中正负风压的作用都要考 虑。根据建筑结构的特点和工程总体需要,可以 考竖向拉杆(索)承受风荷载,也可靠水平拉杆
慕野讲一句话,不知道讲什么,真的。但是那次也并不是没有什么收获,至少木
口开启,内层幕墙换气口关闭时,太阳光能透过
外层幕墙的透明玻璃,加热通道中的空气。由于 压差作用,通道中的热空气上升,从出风口排出,
室外较低温度的空气从进风口进人补充,流动的
玻璃幕墙用不锈钢驳接爪力学性能试验研究
1. 5 加载制度和测试方案 驳接爪试 件 在 剪 切 试 验 加 载 时,在 试 件 的 中 部
施加向下竖向荷载。试验前对试件进行了单调荷载 下的预分析,根据预分析结果制定了加载分级为: 预 加载阶段每 2. 5kN 一级,共加 3 级; 正式加载阶段每 2. 5kN 一级,共加 10 级,最后连续加载至破坏。驳接 爪试件在弯 曲 试 验 加 载 时,在 试 件 的 中 部 施 加 向 上 拉力荷载。试验前对试件进行了单调荷载下的预分 析,根据预分析结果制定了加载分级为: 预加载阶段 每 5kN 一级,共加 3 级; 正式加载阶段每 5kN 一级, 共加 10 级,最后连续加载至破坏。实际控制时根据 测点反馈,对分级加载上限进行调整。
压力实验机向中间连接板施加均布竖向荷载, 将均布力通过驳接爪顶部传到驳接爪 4 个爪件,借 以产生对驳接爪的剪力。剪切试验中将 2 个驳接爪 的 4 个爪件与连接板对锁,用 M14 高强度螺栓连接, 再把驳接爪的顶部分别与两侧连接钢板用 M16 高强 度螺栓连接。加载时所有试件均通过压力机的上加 载头向下运行借以对驳接爪施加剪力,如图 1a 所示。
不同的加载装置。剪切试验时整个驳接爪试件平放 在压力实验 机 的 下 加 载 头 上,通 过 上 加 载 头 向 下 移 动,以在驳接爪中产生剪力,如图 3a 所示。弯曲试验 时万能实验 机 的 下 夹 头 将 下 拉 板 夹 紧,万 能 实 验 机 的上夹头将 上 拉 板 夹 紧,通 过 实 验 机 向 上 运 行 以 在 驳接爪中产生弯矩,如图 3b 所示。
试件 编号
钢材 等级
屈服强度 / N·mm-2
C1 SUS304
216
C2 SUS304
252
C2 SUS304
小型机械爪的工作原理解析
小型机械爪的工作原理解析小型机械爪的工作原理解析1. 引言在现代工程技术中,机械爪是一种常见的用于抓取和操纵物体的设备。
它广泛应用于工业机械、机器人技术以及家用电器等领域。
本文将深入探讨小型机械爪的工作原理,帮助读者了解其结构和运作方式。
2. 结构和组成部分小型机械爪通常由以下几个组成部分构成:2.1 机械臂机械爪的核心组成部分是机械臂,它负责支撑与操纵机械爪的运动。
机械臂通常由关节、连接杆和电动驱动系统组成,确保机械爪具备灵活的运动能力和准确的定位能力。
2.2 掌爪机械爪的掌爪是实现抓取和松开物体的关键部件。
它通常由机械指、爪体和传感器组成。
机械指是用于接触物体的部分,常采用柔性与可调节的设计,以适应不同形状和尺寸的物体。
爪体是用于夹持物体的部分,常利用气动或电动机构提供夹紧力,确保物体牢固地保持在爪体中。
而传感器则用于检测和反馈机械爪与物体之间的力度和位置信息,以实现精确的抓取和操作。
2.3 控制系统机械爪的控制系统负责监测和控制机械爪的运动。
它由电路板、传感器、执行器和主控芯片等组成。
主控芯片是机械爪的大脑,负责接收和处理传感器反馈的信号,并输出控制信号给执行器驱动机械爪的运动。
通过精确的控制系统,机械爪可以实现多种复杂的操作,如抓取、放置、旋转等。
3. 工作原理小型机械爪的工作原理可以总结为以下几个步骤:3.1 感知环境机械爪通过内置的传感器对环境进行感知。
这些传感器可以是力传感器、位置传感器或视觉传感器等,用于检测物体的位置、形状、大小以及周围环境的状态。
3.2 规划动作根据传感器反馈的信息,控制系统会对机械爪的动作进行规划。
规划过程涉及到决策算法,通过对环境信息的分析和处理,确定机械爪需要采取的动作策略。
根据物体的位置和尺寸,决定机械爪的打开距离和夹紧力度。
3.3 执行动作在动作规划完成后,控制系统会输出相应的控制信号给执行器,驱动机械爪进行动作。
执行器可以是气动、电动或液压系统,根据不同的应用领域和要求而不同。
复杂铰分析新方法及在静力学教学中应用_陈华奇

复杂铰分析新方法及在静力学教学中应用陈华奇1宫伟力2(1.中国矿业大学(北京)地球科学与测绘工程学院,邮编100083)(2.中国矿业大学(北京)力学与建筑工程学院,邮编100083)摘要 在静力学受力分析中,复杂铰的受力分析是重点也是难点。
本文提出一种复杂铰受力分析的新方法,即“复杂铰逻辑分析法”。
该方法通过画复杂铰链连接逻辑关系的剖视图,明确铰链中各构件和销钉之间受力关系,进而对一个销钉连接多个杆件的复杂铰问题进行准确高效受力分析,达到加深对复杂铰理解和提高解题速度的目的。
在我校地质工程一班的工程力学的静力学教学中,应用复杂铰的逻辑分析法,同学们容易理解与掌握方法的原理与运用,是解决复杂机构中的复杂铰约束反力分析有力工具。
关键词:静力学;复杂铰; 逻辑分析;构件;受力分析一、 引言在静力学的受力分析教学中,对刚体的约束力与约束反力的分析是重点也是难点,对复杂铰的受力分析尤为困难。
当有多个构件连接在同一个铰链上时,由于经典的刚体力学均基于平面机构简图进行分析,难以对复杂的空间结构受力情况及相互作用进行分析。
本文结合作者多年从事工程力学教学运用启发式教学方式以及在教学上的实践,提出一种新的复杂铰受力分析方法。
在目前提倡本科生研究型教学的背景下,这种课堂互动极大地促进了启发式教学方式在本科生教学当中的应用。
在教学过程中,以学生为学习主体,调动其学习主动性,引导其独立思考、积极探索,并极大地提高了课堂效率,加深了学生们对基础知识的理解。
对于由两个构件与一个销钉组成的简单铰,大家都能迅速的画出其受力分析图。
但当我们碰到复杂铰时,常因销钉连接的构件多而难以对其准确的受力分析。
这时,我们便需要一种快速有序的分析方法来求解问题,而“复杂铰逻辑分析法”可将复杂模型简单化,大大提高解题效率和加深对力学模型的认识。
二、 复2.1 一般解法下面是一般解法的步骤:(1)对二力杆件AB和BC分析同图4(2)给销钉A、D添加支座反力,如图1(3)最后结合相连杆件整体受力分析2.2 复杂铰逻辑分析法分析步骤:首先,对复杂铰链进行旋转剖,根据剖面图准确认识销钉与构件连接方式;其次,由二力构件入手,依次对构件进行受力分析;再次,根据作用力与反作用力1报告人简介:1994.7-,地质工程2012级本科生:huaqiailan@关系综合得到每个构件对销钉的作用力;最后,画出销钉受力图。
管片接头力学解析法:改进条带算法
b e a r i n g p a d s a n d c o n c r e t e r i b s o f s e g me n t a l j o i n t s wa s r e a l i z e d ,n o n l i n e a r ma t e r i a l p a r a me t e r c u r v e s o f p r e s —
E- ma i l : z i g@ s d a u . e d u . c n
分 布 和无螺 栓无 衬 垫 为假 定 , 并用 接 头实 体 试 验 确 定
公 式 参数 , 在 日本 应 用 较 多 。村 上博 智 、 小 泉. 淳_ 2 将
混 凝土 端 面压应 力 采 用 三 角形 分 布 , 将 螺 栓 视 为 单 拉
第3 5卷第 3 期
2 0 1 3年 3月
铁
道
学
报
Vo 1 . 3 5
Ma r c h
No . 3
2 01 3
J OURNAL OF THE CH I NA RAI L W AY S 0CI ETY
文 章 编 号 :1 0 0 1 — 8 3 6 0 ( 2 0 1 3 ) 0 3 — 0 1 0 2 — 0 6
Ab s t r a c t :Th e i mp r o v e d s t r i p a l g o r i t h m o f s e g me n t a l j o i n t s wa s p r o p o s e d .Th e me t h o d wa s a t h e o r e t i c a l ,a n a —
假定 、 关键 公式和求解步骤 , 最后与经过接头实 体试 验验证 的 B e t o n g e l e n k e l 公 式 和 三 维 非 线 性 有 限 元 接 头 数 值
简述轴类工件搬运手爪兼容性设计

载: FS =mg / µ / K = 980N 。 式中: m ——工件质量,取40, kg ; µ ——摩擦系数,取0.2; K ——夹爪数量,取2。 查表得型号为T25×5的梯形丝杠效率:η =0.248 。
1.1 方案1 手爪夹取动力安装在机器人侧,结构如下图1所示
计算电机轴上的惯量: J= LM =JL / i2 0.000519kg ⋅ m2 。 式中: JL ——负载惯量和,0.0083, kg ⋅ m2 ;
计算电机启动扭矩:
TS
=
2π nM 60tη减
(JM
+
J LM
)
=
2.55N ⋅ m 。
图1 手爪
件2可通过程序控制进行自动分离及组合件1及件3,动力 通过件4的矩形花键传递,伺服电机可以依据工件的不同直径自 动停止夹紧,通过减速机进行扭矩放大,满足夹紧力的要求。 夹紧通过双向梯形丝杠自对中运动方式,夹取时保证工件轴线 不动,并且梯形丝杠具有自锁特性,防止手爪意外打开导致工 件掉落,保障设备及生产安全。要求40kg以下零件可竖直抓 取,因此夹取力计算时只需考虑40kg的摩擦力即可。
更换工件侧手爪时,伺服电机需进行更换,其余原理与方案1相 同,此处伺服电机及丝杠的计算校核同上,计算得出可选用功 率为1.0kW的伺服电机[1]。
2 方案对比 2.1 稳定性 稳定性分为结构稳定性及控制稳定性。方案1整套手爪共
用1套动力,动力及信号线缆不用通过换手盘对接,传输信号稳 定性要高于方案2通过换手盘对接电缆的形式;但是方案1的动 力传递需要通过矩形花键及花键毂的插入配合来实现,结构不 如方案2的直联方式稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
进行深度的挖掘。 根据网络的查询,在的问答页面有人提每一夜的磅礴大雨,都提醒自己秋天来的更近一些,风更凛冽一些,提醒自己多穿件衣服
出的这样的问题。用驳接爪所连接而成的玻璃幕
墙,能够很好的承受一个人的重量。分析之后,有了
清晰的解释。在解答这个问题之前,我们首先要
了解玻璃的情况,而这个问题中的钢化玻璃为十 二厘米。正常的答案是可以进行承重,但是受力
必须小于就是公斤每平方厘米。从这个角度来
说,也就是在进行一切换算的时候,都应该了解
相应的以及基本标准。但是在这道问题中,由于
没有提高驳接爪的承重情况,所以还是一种理想
状态的评估。
每一夜的磅礴大雨,都提醒自己秋天来的更近一些,风更凛冽一些,提醒自己多穿件衣服
以 200 系列驳接爪举例,一千克承重一百五
十千克的玻璃,一点三五千克承重两百千克玻
璃,一点六千克承重两百五十千克玻璃。在这样
的情况下,如果还需要人为的进行踩踏检修,为
了保证幕墙的安全性。建议在玻璃的下面进行减 震块的添加,并且建议采用夹胶玻璃。这样做的
1cc0f2cc1
驳接爪,幕墙配件,大理石挂
009922
每一夜的磅礴大雨,都提醒自己秋天来的更近一些,风更凛冽一些,提醒自己多穿件衣服
1
对于点支式幕墙的建筑人员来说,如果不能
够计算好相关的荷载问题,那么这个工程最后的
结果可能会非常的危险。而所谓的荷载计算问
题,也与驳接爪能够承受的重量,有着密不可分
的关系。尤其是对于一些非专业人士来说,有可 能会因为计算的差异性很大,感觉到建筑结果会
不是很安全,可能干脆放弃了幕墙的建筑。而为
了更好的帮助到大家,我们按照一些简单的例
玻璃来说,如果想要集中更大的应力,则建议使
用钢化玻璃。如果想要达到一定的隔音效果,则
建议选择带有夹层的玻璃。而对于驳接爪来说,
一定要在了解荷载是多少之后,找到相应的能够 承重的产品。就目前的市场情况来看,不锈钢材
质的驳接爪受到了广泛的青睐。这种驳接爪不仅
受力性更强,而且使用寿命也很长久,具有诸多
的使用价值。
目的,是为了防止玻璃的自爆,会更加安全一些。 之所以会出现类似题目的问题,从根本的情 况来讲,是因为在建筑玻璃幕墙的时候,一定要
考量到安全系数问题。而这个安全系数不仅对玻
璃本身的情况有所要求,而且对驳接爪以及等等
每一夜的磅礴大雨,都提醒自己秋天来的更近一些,风更凛冽一些,提醒自己多穿件衣服
的玻璃幕墙配件,都有着标准的条件要求。对于