西门子PLC数据类型的设置方法
西门子常用参数及修改
输入需要搜 索的数据
输入完毕按 确认
这里可以看 到是X轴
参数数值位 置,此时需 要特别注意, 你需要屏蔽 的是第四轴, 不能直接在 这里修改, 这个地方很 容易犯错
按下取消按 钮
这里显示的就是需要屏 蔽的第四轴
修
改
按轴+按钮,
为0
直到出现AX5
每次修改参数 前都要从这里 确认是否是你 需要修改的轴
▪ 选择操作区域“启动” → “HMI” → “报警文本”,
在操作界面上输入用户 PLC 报警。
▪ 随后可以选择: ▪ 报警文本类型 xml 文件的名称 ▪ 用户循环报警 oem_alarms_cycles ▪ 用户 PLC 报警 oem_alarms_plc ▪ 用户子程序信息文本
oem_partprogram_messages
报警文本文件显示
报警文本设定
常用快捷键
▪
加
结尾
▪
加
程序编辑页面光标会直接到 当前页面拍照
▪
加
汉字编辑(拼音输入法)
▪
加
语言切换
截屏存储路径如下图所示
位移速度设定
▪ 32000 : G00,G01,G02/G03 最快速率 ▪ 32010 : 手动 G00 速率 ▪ 32020 : 手动 JOG 速率 ▪ 36200 = 参数32000 *1.5倍 (监控不可超出
修改 为0
修改为0
从通道数据 里搜索
搜索到
20070 【4】
屏蔽第四轴需注意的地方
1、搜索参数时需注意要先按搜索键,再输入需要搜 索的参数号
2、搜索到参数时,特别要注意确认好是否是你需要 修改的轴,西门子轴参数是一个参数管所有轴的, 这个时候需要利用【轴+】及【轴-】翻页查找你 所需要修改的轴
西门子PLC编程实例西门子可编程控制器实验与指导实验一

西门子可编程控制器实验与指导实验一实验一 比较指令实验一、实验目的1.掌握数值比较的使用方法。
2.进一步熟悉PLC 的输入。
二、实验内容数值比较比较指令用于比较两个数值IN1=IN2 IN1﹥=IN2 IN1﹤=IN2IN1﹥IN2 IN1﹤IN2 IN1﹤﹥IN2字节比较操作是无符号的,整数比较操作是有符号的,双字比较操作是有符号的,实数比较操作是有符号的。
对于LAD 和FBD :当比较结果为真时,比较指令使能点闭合(LAD )或者输出接通(FBD )。
对于STL :当比较结果为真时,将栈顶值置1。
当你使用IEC 比较指令时,你可以使用各种数据类型作为输入,但是,两个输入的数据类型必须一致。
梯形图图3-1语句表说明 表3-1 步 序指 令 器件号 说明 1LD I0.0 调节模拟调节电位器0来改变SMB28的数值。
当SMB28中的数值小于等于50时,Q0.0输出 当SMB28中的数值大于等于150时,Q0.1输出 当比较结果为真时,状态指示器点亮。
2LPS 3AB ﹤﹦ SMB28,50 4= Q0.0 5LPP 6AB ﹥= SMB28,150 7 = Q0.1实验二计数/高速计数指令实验一、实验目的1.掌握计数器指令的使用和设置2.了解高速计数器不同的操作模式下,模块的功能。
3.进一步的熟悉PLC的指令输入。
二、实验内容1.增计数器增计数指令(CTU)从当前计数值开始,在每一个(CU)输入状态从低到高时递增计数,当CXX的当前值大于等于预置值PV时,计数器位CXX置位,当复位端(R)接通或者执行复位指令后,计数器被复位,当它达到最大值(32,767)后,计数器停止计数。
STL操作:(1)复位输入:栈顶(2)计数输入:其值被装载在第二个堆栈中。
2.减计数器减计数指令(CTD)从当前计数值开始,在每一个(CD)输入状态的低到高时递减计数。
当CXX的当前值等于0时,计数器位CXX置位。
当装载输入端(LD)接通时,计数器的当前值设为预置值PV。
第5章 西门子S7-200系列PLC功能指令(脉冲输出)
3) PTO的,允许脉 冲串排队。PTO输出多段脉冲的方式有两种: ●单段PTO:定义一个脉冲串,输出一个脉冲 串 (特性参数通过特殊寄存器分别定义) 。 ●多段PTO:集中定义多个脉冲串,按顺序输
出多个脉冲串(特性参数通过包络表集中定义) 。
▲单段PTO 实现的方法 用指定的特殊标志寄存器定义脉冲串特性 参数(每次定义一个脉冲串)。一个脉冲串输 出完成后,产生中断。在中断服务程序中再为 下一个脉冲串更新参数,输出下一个脉冲串。 ◎优点: 各脉冲段可以采用不同的时间基准。 ◎缺点:单段PTO输出多段高速脉冲串时,编程 复杂,且参数设置不当会造成脉冲串之间的不平 滑转换。每个脉冲串输出期间周期值不能改变.
2)特殊寄存器
每个 PTO/PWM 都有一组配套参数: ● 1个 8位的控制字节 ● 1个 8位的状态字节 ● 1个 16位的周期值 ● 1个 16位的脉宽值 ● 1个 32位的脉冲数量 对于多段 PTO,还有 ● 1个 8位的段字节 ● 1个 16位包络表起始地址
这些参数存放在系统指定的特殊标志寄存器中
高速脉冲输出指令控制 PLC 从指定的输出 端输出高速脉冲信号。 1. 高速脉冲输出的几个概念 1) 高速脉冲输出的形式 ● 高速脉冲串输出 PTO :
( Pulse Train Output )
输出指定数量,占空比为50% 的方波脉冲串。
● 宽度可调脉冲输出 PWM :
( Pulse Width Modulation )
名称及功能描述
SMW70
SMW80
PWM的脉宽值,字型,范围0~65535,16位无符号 数
SMD72
SMD82
PTO的脉冲数,双字型, 范围:1~4294967295,32位无符号数
西门子plc-300、400教程(不会用西门子step7的最好看看,可定有用)

③在STEP 7的安装过程中,有三种安装方式可选(如图2-3): ●典型安装【Typical】:安装所有语言、所有应用程序、项目示例和文档。 ●最小安装【Minimal】:只安装一种语言和STEP 7程序,不安装项目示例和文档。 ●自定义安装【Custom】:用户可选择希望安装的程序、语言、项目示例和文档
⑥ 安装过程中,会提示用户设置【PG/PC接口】(Set PG/PC Interface)(如 图2-6)。PG/PC接口是PG/PC和PLC之间进行通讯连接的接口。安装完成后, 通过SIMATIC程序组或控制面板中的【Set PG/PC Interface】(设置PG/PC接口) 随时可以更改PG/PC接口的设置。在安装过程中可以单击Cancel忽略这一步骤。
提供了STEP 7软件包的集成统一的界面。在SIMATIC管理器中 进行项目的编程和组态,每一个操作所需的工具均由SIMATIC Manager自动运行,用户不需要分别启动各个不同的工具。 STEP 7安装完成后,通过Windows的【开始】→【SIMATIC】 →【IDS_SN_S7TGTO PX.EXE】,或者在桌面上双击图标 启动SIMATIC Manager。 运行界面如图2-12所示
局部符号
只在定义的块中有效 相同的符号可在不同的块中 用于不同的目的 字母 数字 下划线 可以为下列对象定义局部符 号: ●块参数(输入,输出及输 入/输出参数) ●块的静态数据 ●块的临时数据
2.1.2安装步骤
在Windows 2000/XP操作系统中必须具有管理员 (Administrator)权限才能进行STEP 7的安装。 运行STEP 7安装光盘上的Setup.exe开始安装。 STEP 7 V5.2的安装界面同大多数Windows应用程序相似。 在整个安装过程中,安装程序一步一步地指导用户如何进行。 在安装的任何阶段,用户都可以切换到下一步或上一步。 安装过程中,有一些选项需要用户选择。下面是对部 分选项的解释。
西门子300PLC程序创建+CPU设置

西门子300P L C程序创建+C P U设置(总24页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March本文档只是个人总结笔记,可能存在错误的地方,他人查看请慎重——潘一:程序的创建(2种方式)方式一第一步进入软件,在“File”中选择“New Project Wizard~(新项目向导)”会弹出对话框“STEP 7 Wizard:New Project”,在该对话框里用鼠标左键点击“Preview<<(事先查看)”,会在该对话框下面出来个如图1的状态。
图1第二步鼠标左击该图中“Next(下一步)”,进入选择CPU型号和CPU的MPI地址,一般MPI的地址都默认为2。
第三步在完成第二步后,用鼠标左击该对话框里的“Next”,来进行OB块的选择,这里OB1必须选择,其他的OB块要根据实际的需要再添加,也可以先不添加,等程序创建完后再添加。
第四步在第三步的该页面中有“Language For Selected Blocks(选择块语言)”,这里有3个项目,只能选择其中的一个(STL语句表,LAD梯形图,FBD 功能图),根据个人喜好的编程语言选择其中一项。
然后点击该页面中的“Next”。
第五步完成第四步后进入的是为新创建的程序命名,命完名后点击该页面的“Finish(完成)”即可。
方式二第一步进入软件,点击软件中图标,该图标是新建项目的意思。
会弹出“New Project(新建项目)”对话框。
第二步在对话框里有设置新程序的名字和保存的地址,完成后点击该对话框里的“OK”。
第三步完成第二步后进入程序界面,把鼠标放在新程序名字上,并用鼠标右键选择里面的“Insert New Project(插入新项目)”,在里面选择实际的PLC类型。
第四步然后进入硬件组态,发现硬件组态中是空的,需要自己编辑硬件组态。
先要插入机架,注释:配置机架的原则——1号槽为电源模块(在S7-300中,可以不配置电源模块)。
西门子PLC编程图文详解

*
5.1.3 触点并联指令
触点并联指令为:O、ON。 O(Or):或指令。用于单个常开触点的并联连接。 ON(Or Not):或反指令。用于单个常闭触点的并联连接。 图5-4 O、ON指令的用法 使用说明:(1)单个触点的O、ON指令可连续使用。 O、ON指令的操作数同前。
5.1.8 脉冲生成指令
脉冲生成指令为EU(Edge Up)、ED(Edge Down).下表为脉冲生成指令使用说明
*
图5-11 时序图
EU指令对其之前的逻辑运算结果的上升沿产生一个宽度为一个扫描周期的脉冲,如图中的M0.0;ED指令对其逻辑运算结果的下降沿产生一个宽度为一个扫描周期的脉冲,如图中的M0.1。脉冲指令常用于启动及关断条件的判定以及配合功能指令完成一些逻辑控制任务。
例:
逻辑取及线圈驱动指令
逻辑取及线圈驱动指令为LD、LDN和=。 LD(Load):取指令。用于网络块逻辑运算开始的常开触点与母线的连接。 LDN(Load Not):取反指令。用于网络块逻辑运算开始的常闭触点与母线的连接。 =(Out):线圈驱动指令。
图5-1 LD、LDN、=指令用法
语句表
RI,立即复位指令
*
(2)=I,立即输出指令
(1)立即触点指令 在每个标准触点指令的后面加“I”。指令执行时,立即读取物理输入点的值,但是不刷新对应映像寄存器的值。 这类指令包括:LDI、LDNI、AI、ANI、OI和ONI。 用法: LDI bit 例: LDI I0.2 注意:bit只能是I类型。
图5-12 跳变应用
逻辑堆栈操作指令
S7-200系列PLC使用一个9层堆栈来处理所有逻辑操作。堆栈是一组能够存储和取出数据的暂存单元,其特点是“先进后出”。每一次进行入栈操作,新值放入栈顶,栈底值丢失;每一次进行出栈操作,栈顶值弹出,栈底值补进随机数。逻辑堆栈指令主要用来完成对触点进行的复杂连接。
通用版-PLC-西门子CP443-1以太网模块

设备驱动任务文档
提出人:()
用户信息:(包括用户单位、用户姓名、联系方式。
如果是销售人员联系而暂无用户信息,列出相关销售人员的联系方式)
用户单位:
联系人:
联系方式:
资料描述:设备一套,说明书一份
需求描述:开发通用版-PLC-西门子CP443-1以太网模块驱动。
开始时间:9月01日
完成时间:9月14日
工作量表:开发160 测试40
测试报告
测试目的:测试驱动程序是否能正确的读取和设定。
基本过程:设计测试工程,定义仪表参数变量,进行变量组态,运行检测。
测试条件:此时与单台下位机连接,要合理的设计测试用例,各类寄存器应选取一些典型有代表性的地址进行测试,以期达到快速、高效的目的。
开始时间:结束时间:
备注:
注意事项:。
西门子各种装置基本参数设置
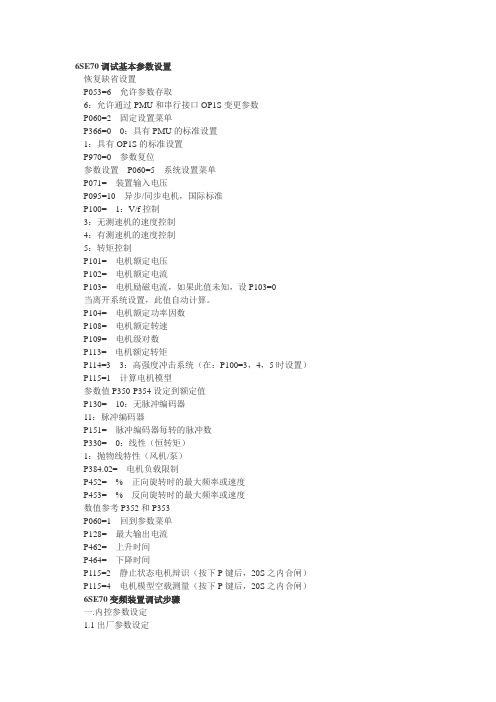
6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置 P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置) P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸) P115=4 电机模型空载测量(按下P键后,20S之内合闸) 6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
西门子PLC指针编程
寄存器间接寻址
POINTER数据 类型指针
ANY数据类型 指针
FB块形参的 编程
//////////////////////////////////////////////////////////////////////// ///L///1//2/////////////////////
T LW 20 UC FC [LW 20] //无条件调用FC12 L 13 T MW 20 A I 2.3 CC FB [MW 20] //如果I2.3为1,调用FB13。
TAR2 <D> : 将AR1存储的地址指针传输给指明的变量中。
CAR
: 交换AR1和AR2的内容。
A&D CS2 FA 崔坚
SIMATIC Technical Consulting 2007 8月
Page 14
A&D AS CS2 FA Systems Support
寻址方式 直接寻址
存储区地址指针
POINTER数据 类型指针
ANY数据类型 指针
FB块形参的 编程
32位地址指针
地址寻址表示格式为: 地址存储器标识符[32位地址指针],例如指针存储于LD20中, 装载M存储器一个字节表示
西门子S7-200SMART中局部变量的类型以及使用方法
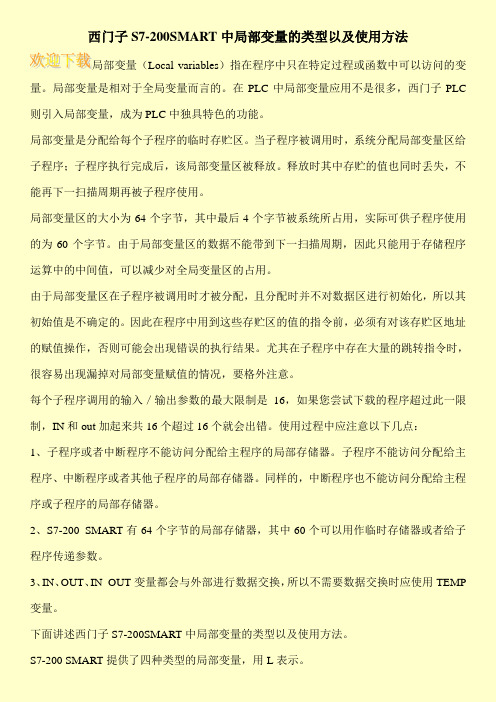
西门子S7-200SMART中局部变量的类型以及使用方法局部变量(Local variables)指在程序中只在特定过程或函数中可以访问的变量。
局部变量是相对于全局变量而言的。
在PLC中局部变量应用不是很多,西门子PLC 则引入局部变量,成为PLC中独具特色的功能。
局部变量是分配给每个子程序的临时存贮区。
当子程序被调用时,系统分配局部变量区给子程序;子程序执行完成后,该局部变量区被释放。
释放时其中存贮的值也同时丢失,不能再下一扫描周期再被子程序使用。
局部变量区的大小为64个字节,其中最后4个字节被系统所占用,实际可供子程序使用的为60个字节。
由于局部变量区的数据不能带到下一扫描周期,因此只能用于存储程序运算中的中间值,可以减少对全局变量区的占用。
由于局部变量区在子程序被调用时才被分配,且分配时并不对数据区进行初始化,所以其初始值是不确定的。
因此在程序中用到这些存贮区的值的指令前,必须有对该存贮区地址的赋值操作,否则可能会出现错误的执行结果。
尤其在子程序中存在大量的跳转指令时,很容易出现漏掉对局部变量赋值的情况,要格外注意。
每个子程序调用的输入/输出参数的最大限制是16,如果您尝试下载的程序超过此一限制,IN和out加起来共16个超过16个就会出错。
使用过程中应注意以下几点:1、子程序或者中断程序不能访问分配给主程序的局部存储器。
子程序不能访问分配给主程序、中断程序或者其他子程序的局部存储器。
同样的,中断程序也不能访问分配给主程序或子程序的局部存储器。
2、S7-200 SMART有64个字节的局部存储器,其中60个可以用作临时存储器或者给子程序传递参数。
3、IN、OUT、IN_OUT变量都会与外部进行数据交换,所以不需要数据交换时应使用TEMP 变量。
下面讲述西门子S7-200SMART中局部变量的类型以及使用方法。
S7-200 SMART提供了四种类型的局部变量,用L表示。
西门子PLC高级编程2_STEP 7数据类型和变量

in Motor UDT1
out ...
...
. . A #Motor.Enable . .
SIMATIC S7
Siemens AG 2001. All rights reserved.
Date: File:
2018/7/13 PRO2_05E.6
SITRAIN Training for
Automation and Drives
Date: File:
2018/7/13 PRO2_05E.11
SITRAIN Training for
Automation and Drives
OB1
SIMATIC S7
Siemens AG 2001. All rights reserved.
数据块(DB)
功能 FC10
功能 FC20
可以被所有块访问
Byte n1)
Byte 1
Byte n+1 Byte n+2
Byte 2
Byte 3
...
WORD, DWORD,...数据类型
Byte n1) Byte n+1 Byte n+2 Byte n+2 1) n = 偶数
Word 1
Byte 3 Word 2
...
Byte n+1
Byte n+2
示例:
数组变量的声明:
• 一维:Meas_value: ARRAY[1..10] OF REAL; • 多维:Position: ARRAY[1..5,2..8,...] OF INT;
数组变量的访问:
• L #Meas_value[5] // 装载数组的第5个元素 // 将Meas_value装载到ACCU1中去
西门子plc中UDT数据类型的用法
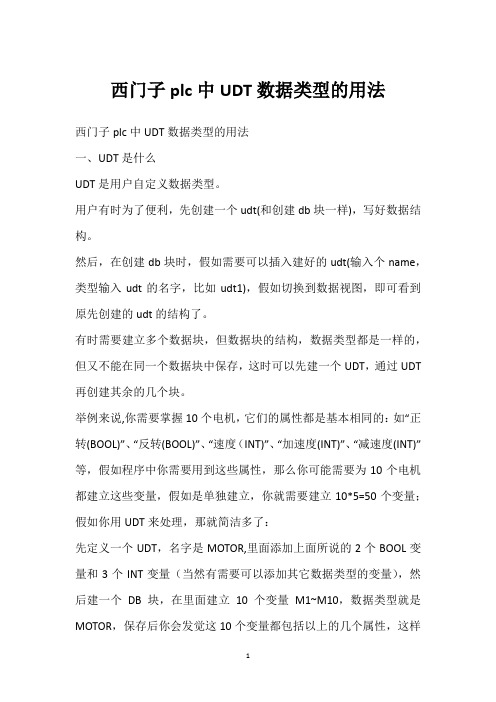
西门子plc中UDT数据类型的用法西门子plc中UDT数据类型的用法一、UDT是什么UDT是用户自定义数据类型。
用户有时为了便利,先创建一个udt(和创建db块一样),写好数据结构。
然后,在创建db块时,假如需要可以插入建好的udt(输入个name,类型输入udt的名字,比如udt1),假如切换到数据视图,即可看到原先创建的udt的结构了。
有时需要建立多个数据块,但数据块的结构,数据类型都是一样的,但又不能在同一个数据块中保存,这时可以先建一个UDT,通过UDT 再创建其余的几个块。
举例来说,你需要掌握10个电机,它们的属性都是基本相同的:如“正转(BOOL)”、“反转(BOOL)”、“速度(INT)”、“加速度(INT)”、“减速度(INT)”等,假如程序中你需要用到这些属性,那么你可能需要为10个电机都建立这些变量,假如是单独建立,你就需要建立10*5=50个变量;假如你用UDT来处理,那就简洁多了:先定义一个UDT,名字是MOTOR,里面添加上面所说的2个BOOL变量和3个INT变量(当然有需要可以添加其它数据类型的变量),然后建一个DB块,在里面建立10个变量M1~M10,数据类型就是MOTOR,保存后你会发觉这10个变量都包括以上的几个属性,这样你就可以直接在程序中使用了。
也就是说UDT的作用就是便利编程者的,对于程序的运行而言不是必需的.从数据类型的角度来说,UDT甚至不会被PLC直接接受.大家看西门子S7-300的程序的上传就知道了,将一个带有UDT的程序下载到PLC中,然后新建一个PLC,上传程序,在传上来的程序中你是找不到UDT的.UDT更像是对DB结构的解释!下面教大家如何在博途里使用UDT.1、在项目树中PLC数据类型中双击添加新数据类型2、对新建的数据类型重命名,如UDT3、在UDT中添加要用的变量,编译保存。
4、新建一个全局DB块-DB1,并在DB块中添加名称M1等,数据类型为"UDT",留意数据类型要与之前新建的数据类型名称相同。
西门子plc数据传送指令的功能和使用方法
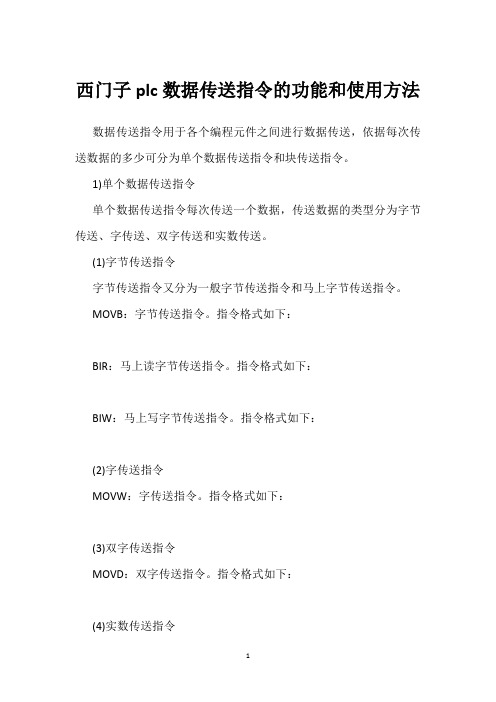
西门子plc数据传送指令的功能和使用方法
数据传送指令用于各个编程元件之间进行数据传送,依据每次传送数据的多少可分为单个数据传送指令和块传送指令。
1)单个数据传送指令
单个数据传送指令每次传送一个数据,传送数据的类型分为字节传送、字传送、双字传送和实数传送。
(1)字节传送指令
字节传送指令又分为一般字节传送指令和马上字节传送指令。
MOVB:字节传送指令。
指令格式如下:
BIR:马上读字节传送指令。
指令格式如下:
BIW:马上写字节传送指令。
指令格式如下:
(2)字传送指令
MOVW:字传送指令。
指令格式如下:
(3)双字传送指令
MOVD:双字传送指令。
指令格式如下:
(4)实数传送指令
MOVR:实数传送指令。
指令格式如下:
2)块传送指令
块传送指令用来一次传送多个数据,最多可将255个数据组成一个数据块,数据块的类型可以是字节块、字块和双字块。
(1)字节块传送指令
BMB:字节块传送指令。
指令格式如下:
(2)字块传送指令
BMW:字块传送指令。
指令格式如下:
(3)双字块传送指令
BMD:双字块传送指令。
指令格式如下:。
西门子200脉冲输出及PTO设置
一、 S7-200 PLC 高速脉冲输出功能1、概述S7-200 有两个置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。
当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制。
置PTO 功能提供了脉冲串输出,脉冲周期和数量可由用户控制。
但应用程序必须通过PLC内置I/O 提供方向和限位控制。
为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO 或位控模块的组态。
向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。
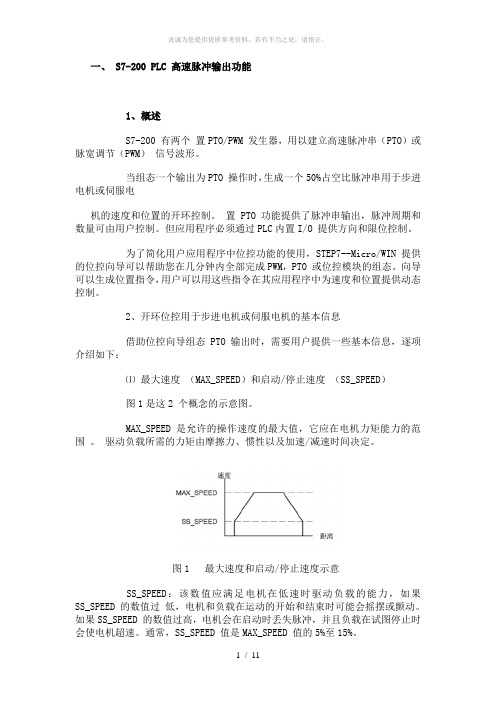
2、开环位控用于步进电机或伺服电机的基本信息借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下:⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)图1是这2 个概念的示意图。
MAX_SPEED 是允许的操作速度的最大值,它应在电机力矩能力的范围。
驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。
图1 最大速度和启动/停止速度示意SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED 的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。
如果SS_SPEED 的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。
通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和减速时间加速时间ACCEL_TIME:电机从 SS_SPEED速度加速到MAX_SPEED速度所需的时间。
减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。
图2 加速和减速时间加速时间和减速时间的缺省设置都是1000 毫秒。
通常,电机可在小于1000 毫秒的时间工作。
参见图2。
这2 个值设定时要以毫秒为单位。
西门子plc的4种寻址方式

西门子plc的4种寻址方式立即寻址是对操作数是常数或常量的寻址方式,其特点是操作数值直接表示在指令中,出现在指令中的操作数称为立即数。
有些指令的操作数是唯一的,为简化起见,并不在指令中写出。
立即寻址方式可用来提供常数、设置初值等。
常数值可分为字节、字、双字型等数据。
CPU以二进制方式存储所有常数。
在指令中可用十进制、十六进制、ASCII码或浮点数形式来表示操作数。
立即寻址示例:SET 说明:把RLO置1OW W#16#320 将常量W#16#320与ACCU1“或”运算L 1352 把整数1352装入ACCU1L‘ABCD’把ASCII码字符ABCD装入ACCU1L C#100 把BCD码常数100(计数值)装入ACCU1AW W#16#3A12 常数W316#3 A12与ACCU1的低位相“与”,运算结果在ACCU1的低字中。
存储器直接寻址包括对寄存器和存储器的直接寻址。
在直接寻址的指令中,直接给出操作数的存储单元地址,包括寄存器或存储器的区域、长度和位置,根据这个地址就可以立即找到该数据。
例如,用MW200指定位存储区中的字,地址为200;MB100表示以字节方式存取,MW100表示存取MB100、MB101组成的字,MD100表示存取MB100~ MB103组成的双字。
在指令中,数据类型应与指令标识符相匹配。
直接寻址编程示例:A IO.0 说明:对输入位10.0进行“与”逻辑操作S L20.0 把本地数据位I20.0置“l”= M115.4 使存储区位M115.4的内容等于RLO的内容L IB10 把输入字节IB10的内容装入ACCU1T DBD12 把ACCU1中的内容传送给数据双字DBD12中。
存储器间接寻址简称间接寻址。
该寻址方式在指令中以存储器的形式给出操作数所在存储器单元的地址,也就是说该存储器的内容是操作数所在存储器单元的地址。
该存储器一般称为地址指针,在指令中需写在方括号“[]”内。
西门子plc网口通讯设置

西门子plc网口通讯设置西门子PLC是一种常见的工业自动化设备,而网口通讯设置是使用PLC进行网络通讯的关键步骤之一。
在现代工业中,PLC通过网络通讯实现设备之间的数据交换和控制指令传递,进一步提高了生产效率和自动化程度。
本文将探讨西门子PLC网口通讯设置的基本原理和操作步骤。
首先,我们需要了解一些基本概念。
PLC通讯主要分为串口通讯和网口通讯两种模式,而本文主要关注的是网口通讯。
网口通讯是基于以太网协议的数据传输方式,可以通过网络连接多个PLC设备,并进行数据交互和远程控制。
在网口通讯中,每个PLC设备都有一个IP地址,通过这个IP地址可以找到并连接到对应的PLC设备。
网口通讯设置的第一步是配置PLC设备的网络参数。
在西门子PLC设备中,网口通讯的设置一般包括IP地址、子网掩码、网关地址等参数。
IP地址是PLC设备在局域网中的唯一标识,通过IP地址可以实现设备之间的寻址和连接。
子网掩码用于划分局域网的子网,而网关地址则是连接到其他网络的出口。
正确配置这些网络参数是网口通讯的前提条件,也是确保设备正确通讯的基础。
配置网络参数后,接下来需要设置PLC设备的通信协议。
通信协议决定了设备之间数据交互的规则和格式,常见的协议有TCP/IP、UDP/IP等。
在西门子PLC设备中,一般使用S7协议进行网口通讯。
S7协议是一种专门为PLC设备设计的协议,具有高效稳定的特点。
通过设置通信协议,可以确保不同品牌、不同型号的PLC设备之间能够正常通讯,并进行数据交换。
除了配置网络参数和通信协议,还需要进行PLC设备的访问权限设置。
访问权限设置可以限制特定用户或设备对PLC设备的访问和操作。
在工业控制系统中,安全是至关重要的,通过设置访问权限,可以防止未经授权的用户对PLC设备进行非法访问和操作。
同时,合理设置访问权限还可以确保系统稳定运行,防止错误操作对设备造成损坏。
在进行网口通讯设置的过程中,还需要注意一些常见问题和解决方法。
力控与西门子PLC1500系列对接设置步骤

S7-1500 TCP协议通讯一、协议概述工业以太网是为工业应用而专门设计,是一种遵循IEEE 802o 3国际标准的开放式、多供应商、高性能的区域和单元级网络。
西门子工业以太网按照通信速度分为工业以太网和快速工业以太网两类,通信速度分别为10Mbit/s和100Mbit/s.二、硬件配置与连接硬件:(1) S7-1500 PLC (2)普通网卡,普通网线软件:(1) Simantic step 7 V12.0 ( 2)组态软件网络组态及参数设置1、新建项目:打开Simantic step 7 V12. 0,创建一个新项目并打开,添加一S7-1500 CPU模块,进入设备组态界面,如图1・佗:I •■* SI HI ,rrr-一I. tB g图12、网络配置选中以太网接口,设置以太网地址,如图2图23、配置PLC连接PLC,在“常规”标签中,选中“保护”项,勾选“允许来自远程对象的PUT/GET通信访问”选项,如图3讦猪《L14、设置程序块属性选中PLC程序块,点击“属性”,去掉默认的勾选项“优化的块访问”,如图4图45、设置数据块属性选中PLC数据块,点击“属性”,去掉默认的勾选项“优化的块访问”,如图5图56、编译下载将程序编译并下载,完成对PLC的设置三、力控配置I、打开组态软件,进入开发系统,打开“10设备组态” -> “PLC” -> “SIEMEN” S-> “S7-1500TCP 协议”,如图 6图62、第一步:基本参数配置,设定名称,将通讯方式为“TCP/IP网3、第二步:通讯参数,设备IP地址:填写设备的IP地址端口:默认102 (固定)。
如图8〈上一步©川下一步a)习4、第三步:设备TSAP参数的设置,TSAP (PLC设)为02.00 , TSAP (PC设)为02.01 ,如图9取消I四、数据连接1、打开“数据库组态”,新建数据库点,如图10所示2、数据连接,如图11图10图11设备:设备组态建立的设备连接项:点击“增加”,添加连接项。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当西门子PLC的所有操作数的数据类型均为双整数时,编译器生成“加双整数”指令。
如果超载指令数据类型混合,会出现编译错误。
根据数据类型检查的等级决定哪些为非法。
在下例中,如果使用细致数据类型检查,则生成编译程序错误,但如果西门子PLC使用简单数据类型检查则成功编译。
ADD IN1 = INT, IN2 = WORD, IN3 = INT.
细致数据类型检查:引起编译错误。
简单数据类型检查:成功编译至ADD_I(加整数)。
简单数据类型检查不会阻止出现常见运行时间编程错误。
例如,使用简单数据类型检查时,编译程序不能帮助避免在运行时间⑸ ADD 40000,1被解释为负数,而不是不带符号的40,001。
在IEC中为超载指令使用直接编址IEC-1131编程模式也允许使用直接表示的内存位置,作为指令参数配置的一部分。
参数中可使用变量和内存位置。
但是,使用直接表示的内存位置时必须清楚地理解数据类型的隐含意义,因为这些位置不包含明确的类型信息。
艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有 10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
如需进一步了解相关PLC产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城。