状态观测器的设计
控制系统的扩展状态观测器设计与应用

控制系统的扩展状态观测器设计与应用在控制系统中,扩展状态观测器是一种重要的设计和应用工具。
它能够提供系统状态的准确估计和可靠的反馈,从而帮助我们实现对系统的精确控制和优化。
本文将介绍控制系统中扩展状态观测器的设计原理和应用情况。
一、扩展状态观测器的设计原理扩展状态观测器是一种用于估计系统状态的观测器,它通过测量系统的输出和控制输入,利用系统动力学模型进行状态估计。
与传统的状态观测器相比,扩展状态观测器引入了一个扩展变量,能够更准确地估计系统状态。
扩展状态观测器的设计需要满足以下原则:1.系统模型准确性:扩展状态观测器的设计基于系统的动力学模型,因此模型的准确性对观测器的性能至关重要。
在设计观测器时,需要确保系统模型能够准确地描述系统的动态行为,并符合实际要求。
2.观测器稳定性:观测器的稳定性是指观测误差在有限时间内能够收敛到零。
为了实现观测器的稳定性,设计时需要考虑系统的可观测性和观测误差的界定。
3.观测器误差鲁棒性:在实际应用中,系统模型可能存在不确定性或者扰动。
为了提高观测器的鲁棒性,设计时需要考虑不确定性因素,并采用相应的鲁棒性设计方法。
二、扩展状态观测器的应用情况扩展状态观测器被广泛应用于不同领域的控制系统中,下面将以几个具体应用案例进行介绍。
1.飞行控制系统:在飞机的自动驾驶系统中,扩展状态观测器被用于估计飞机的姿态和位置信息。
通过测量飞机的加速度和陀螺仪的转速等传感器数据,通过状态估计算法对飞机的姿态和位置进行准确估计,从而实现飞机的精确控制。
2.电力系统:在电力系统中,扩展状态观测器被用于估计电力网络的状态和负荷信息。
通过测量电压、电流等传感器数据,通过状态估计算法对电力系统的状态进行准确估计,从而实现电力系统的稳定运行和优化控制。
3.机器人控制系统:在机器人控制系统中,扩展状态观测器被用于估计机器人的姿态和位置信息。
通过测量机器人的传感器数据,如陀螺仪、加速度计和激光雷达等,通过状态估计算法对机器人的姿态和位置进行准确估计,从而实现机器人的精确运动控制和路径规划。
利用MATLAB设计状态观测器
利用MATLAB 设计状态观测器本节将介绍用MATLAB 设计状态观测器的若干例子。
我们将举例说明全维状态观测器和最小阶状态观测器设计的MATLAB 方法。
------------------------------------------------[例1] 考虑一个调节器系统的设计。
给定线性定常系统为Cxy Bu Ax x =+=& 式中]01[,10,06.2010=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=C B A且闭环极点为)2,1(==i s i μ,其中4.28.1,4.28.121j j −−=+−=μμ期望用观测-状态反馈控制,而不是用真实的状态反馈控制。
观测器的期望特征值为821−==μμ试采用MATLAB 确定出相应的状态反馈增益矩阵K 和观测器增益矩阵e K 。
[解]对于题中给定的系统,可利用如下MATLAB Program 1来确定状态反馈增益矩阵K和观测器增益K。
矩阵eMATLAB Program 1% Pole placement and design of observer ------% ***** Design of a control system using pole-placement% technique and state observer. Solve pole-placement% problem *****% ***** Enter matrices A,B,C,and D *****A=[0 1;20.6 0];B=[0;1]C=[1 0];D=[0];% ***** Check the rank of the controllability matrix Q *****Q=[B A*B];Rank(Q)ans=2% ***** Since the rank of the controllability matrix Q is 2, % arbitrary pole placement is possible *****% ***** Enter the desired characteristic polynomial by% defining the following matrix J and computingpoly(J) *****J=[-1.8+2.4*i 0;0 -1.8-2.4*i];Poly(J)ans=1.000 3.6000 9.0000% ***** Enter characteristic polynomial Phi *****Phi=polyvalm(poly(J),A);% ***** State feedback gain matrix K can be given by ***** K=[0 1]*inv(Q)*PhiK=29.6000 3.6000% ***** The following program determines the observer matrix Ke *****% ***** Enter the observability matrix RT and check its rank *****RT=[C’ A’*C’];rank(RT)ans=2% ***** Since the rank of the observability matrix is 2, design of% the observer is possible *****% **** Enter the desired characteristic polynomial by defining % the following matrix J0 and entering statement poly(JO) *****JO=[-8 0;0 -8];Poly(JO)ans=1 16 64% ***** Enter characteristic polynomial Ph ***** Ph=polyvalm(ply(JO),A);% ***** The observer gain matrix Ke is obtained from ***** Ke=Ph*(inv(RT’))*[0;1]Ke=16.000084.60000求出的状态反馈增益矩阵K 为[]6.36.29=K观测器增益矩阵e K 为⎥⎦⎤⎢⎣⎡=6.8416e K 该观测-状态反馈控制系统是4阶的,其特征方程为0=+−+−C K A sI BKA sI e通过将期望的闭环极点和期望的观测器极点代入上式,可得5764.3746.1306.19)8)(4.28.1)(4.28.1(2342++++=+++−+=+−+−s s s s s j s j s C K A sI BK A sI e这个结果很容易通过MATLAB得到,如MATLAB Program 2所示(MATLAB Program 2是K已MATLAB Program1的继续。
一类线性时变系统的状态观测器设计方法

摘要该论文主要研究控制领域中的线性时变系统的状态观测器设计问题,其目获得的问题。
区别于在状态观测器理论方面已经趋于成熟的线性定常系统,线性时变系统的研究相对困难并且具有挑战性,所发表出的理论成果较少,并且容。
该论文的设计思路是对于原有的线性时变系统,首先对其进行线性非奇异变换以使得变换后的系统具有某种特殊形式,而后对变换后的系统进行状态观测器设计,并最终达到重构原有系统状态的设计要求。
针对此思路能够得知设计工作主要划分为两个部分,即线性非奇异变换以及状态观测器设计。
首先,该论文提出线性时变系统基于方块展开的状态观测器设计。
线性非奇异变换后的系统中系数矩阵皆为分块形式,并且其中包含较多的零阵以及单位阵。
而后对变换后的系统进行全维,降维以及Luenberger状态函数观测器设计,给出各自的动态方程,系数矩阵求解方法以及算法步骤等。
其次,该论文提出线性时变系统基于行展开的状态观测器设计。
线性非奇异变换矩阵由原有系统能观测性矩阵中线性无关的行经过运算得到。
变换后的系统仍为分块形式,不同点在于其各个子块中均包含较多的零元。
而后对变换后的系统进行全维状态观测器设计。
上述基于一种设计思路,两种设计方法得到的各个状态观测器均由仿真验证其可行性以及有效性。
并且针对两种设计方法该论文给出对比,从而在具体最后,该论文还对线性时变系统中闭环系统的分离原理问题进行了初步研究,得到该论文所设计出的状态观测器均符合分离原理的结论。
该论文主要研究成果是对线性时变系统的状态观测器设计此研究课题在理论层面上的推进与添补。
所设计出的状态观测器其优点在于可以避免求解复杂的矩阵微分方程,并且将部分运算转化到线性定常系统中。
这样极大地降低与关键词:线性时变系统;状态观测器设计;线性非奇异变换;分离原理AbstractIn this paper, linear state observer design of linear time-varying systems has been researched to solve the state reconstruction problem that states cannot be acquired compeletely or partialy due to various reasons in actual engineering. Different from the mature theory of state observer for linear time-invariant systems, research on linear time-varying systems is ralatively more difficult and challenging, less amount of theoretical achievements and closer to the actual project. So it is the research focus in recent years. The main contents of this paper are described below.Design ideas of this paper is to transform the original linear time-varying systems into some special form with linear non-singular transformations initially. Then the state observer design based on the linear time-varying systems transformed can achieve the reconstructed state of original linear time-varying systems. For this idea, we can know that the design work is divided into two parts, namely, linear nonsingular transformation and state observer design.Firstly, the state observer design of linear time-varying systems based on the square matrices is presented. The coefficient matrices of systems transformed are all partitioned including much zero and unit submatrices. Then the full, reduced and Luenberger state observer design of transformed systems are illustrated detailed including some aspects such as the solutions of dynamis equations and coefficient matrices, as well as the algorithms and their steps.Secondly, we propose the state observer design for linear time-varying systems based on row expansion. The linear nonsingular transformation matrix is obtained by computing the linearly independent rows of observation matrix. The coefficient matrices of transformed system are still partitioned, and the difference between two linear nonsingular metiods is that each of its sub-blocks contains much zero elements. The the full state observer is designed.Based on a design idea, all the state observers obtained by the two design methods are proved to be feasible and effective by simulation. Moreover, the contrast of two methods is proposed in this paper in order to select in actual engineering.Finally, the paper studies the separation principle of closed loop system in linear time-varying system, and obtains the conclusion that the state observer designed in this paper meets the separation principle.The main research results of the paper is to promote and increase theoritical achienements of the state observer design for linear time-varying systems. The pivotal merit is that it can avoid solving complex differential equations by transforming them into constant partially. These reduces and simplifies the computational complexity aswell as the amount of computation greatly. Therefore, they also have practical engineering significance.Keywords: Linear time-varying systems; state observer design; Linear nonsingular transformation; Separation principle目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1论文课题来源及研究背景和意义 (1)1.1.1 课题来源 (1)1.1.2 课题的背景及意义 (1)1.1.3 时变系统分类 (2)1.1.4 观测器分类 (3)1.2国内外研究现状 (3)1.3论文主要研究内容及安排 (5)第2章基础内容介绍 (6)2.1线性时变系统概述 (6)2.1.1 线性时变系统模型及相关定义 (6)2.1.2 线性时变系统稳定性 (7)2.2线性时变系统的线性非奇异变换 (8)2.3线性定常系统状态观测器设计基本介绍 (10)2.3.1 全维状态观测器 (10)2.3.2 降维状态观测器 (11)2.3.3 LUENBERGER状态函数观测器 (12)2.4函数矩阵运算介绍 (12)2.5本章小节 (13)第3章基于方块展开的状态观测器设计 (14)3.1基于方块展开的线性非奇异变换 (14)3.2全维状态观测器设计 (17)3.3降维状态观测器设计 (21)3.4LUENBERGER状态函数观测器设计 (23)3.5状态观测器的分离原理研究 (27)3.6仿真验证 (32)3.7本章小结 (37)第4章基于行展开的状态观测器设计 (38)4.1相关理论基础 (38)4.2基于行展开的线性非奇异变换 (41)4.3全维状态观测器设计 (44)4.4两种状态观测器设计方法对比 (46)4.5仿真验证 (46)4.6本章小结 (48)结论 (50)参考文献 (51)攻读硕士学位期间发表的论文及其它成果 (56) (57)致谢 (59)第1章绪论1.1 论文课题来源及研究背景和意义1.1.1 课题来源本课题来源于国家自然科学基金重大项目-空间翻滚目标的捕获策略及组合体的快速稳定控制以及国家自然科学基金创新研究群体项目-航天飞行器的鲁棒控制理论及应用。
现代控制理论状态反馈和状态观测器的设计实验报告
现代控制理论状态反馈与状态观测器的设计实验报告
LT ac ker(AT ,CT , P)
或
LT place( AT ,CT , P)
其中 P 为给定的极点,L 为状态观测器的反馈阵。
例 3 已知开环系统
其中
x• Ax bu y Cx
0 1 0 0
A=
0
0
1
,b=
0
,C= 1
0
0
6 11 6 1
(1)
现代控制理论状态反馈与状态观测器的设计实验报告
其中 A : n n; B : n r;C :: m n
引入状态反馈,使进入该系统的信号为ຫໍສະໝຸດ u r Kx(2)
式中 r 为系统的外部参考输入,K 为 n n 矩阵、
可得状态反馈闭环系统的状态空间表达式为
(3) 可以证明,若给定系统就是完全能控的,则可以通过状态反馈实现系统
设计全维状态观测器,使观测器的闭环极点为-2 j2 3 ,-5、
解 为求出状态观测器的反馈矩阵 L,先为原系统构造一对偶
系统,
z AT C T n
w
BT
z
然后采用极点配置方法对对偶系统进行闭环极点位置的配置,得
到反馈阵 K,从而可由对偶原理得到原系统的状态观测器的反馈阵 L。
现代控制理论状态反馈与状态观测器的设计实验报告
K=acker(A,b,p) 式中,p 为给定的极点,K 为状态反馈阵。
对于多变量系统的极点配置,MATABLE 控制系统工具箱也给出了函数
place(),其调用格式为
K=place(A,B,P)
例2 已知系统的状态方程为
0 0 4 1 2 0
•
x
10
现代控制实验状态反馈器和状态观测器的设计

现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。
现代控制实验--状态反馈器和状态观测器的设计

现代控制实验--状态反馈器和状态观测器的设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN状态反馈器和状态观测器的设计一、实验设备PC 计算机,MATLAB 软件,控制理论实验台,示波器二、实验目的(1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法;(2)掌握用极点配置的方法(3)掌握状态观测器设计方法(4)学会使用MATLAB工具进行初步的控制系统设计三、实验原理及相关知识(1)设系统的模型如式所示若系统可控,则必可用状态反馈的方法进行极点配置来改变系统性能。
引入状态反馈后系统模型如下式所示:(2)所给系统可观,则系统存在状态观测器四、实验内容(1)某系统状态方程如下10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =理想闭环系统的极点为[]123---.(1)采用 Ackermann 公式计算法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1; 3; -6];P=[-1 -2 -3];K=acker(A,B,P)Ac=A-B*Keig(Ac)(2)采用调用 place 函数法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6];eig(A)'P=[-1 -2 -3];K=place(A,B,P)eig(A-B*K)'(3)设计全维状态观测器,要求状态观测器的极点为[]---123代码:a=[0 1 0;0 0 1;-4 -3 -2];b=[1;3;-6];c=[1 0 0];p=[-1 -2 -3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=a-h*c(2)已知系统状态方程为:10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =(1)求状态反馈增益阵K ,使反馈后闭环特征值为[-1 -2 -3];代码:A=[0 1 0;0 0 1;4 -3 -2];b=[1;3;-6];p=[-1 -2 -3];k=acker(A,b,p)A-b*keig(A-b*k)(2)检验引入状态反馈后的特征值与希望极点是否一致。
第13章 线性定常系统的状态反馈和状态观测器设计

第13章 线性定常系统的状态反馈和状态观测器设计 解 (1)系统的能控矩阵
因为rankUc=2,所以系统是能控的。 故可以通过状态反馈实现闭环系统极点的任意配置
第13章 线性定常系统的状态反馈和状态观测器设计 (2)期望闭环极点配置在-1,-2,由
第13章 线性定常系统的状态反馈和状态观测器设计
第13章 线性定常系统的状态反馈 和状态观测器设计
13.1 状态反馈与输出反馈 13.2 闭环系统的极点配置 13.3 状态观测器的设计
第13章 线性定常系统的状态反馈和状态观测器设计
13.1 状态反馈与输出反馈
13.1.1 状态反馈 状态反馈就是将系统的每一个状态变量乘以相应的反馈
得 (3)求状态反馈增益矩阵k,则
第13章 线性定常系统的状态反馈和状态观测器设计 (4)状态反馈系统模拟结构图如图13-4所示。
图13-4 状态反馈系统模拟结构图
第13章 线性定常系统的状态反馈和状态观测器设计
2.方法二 求解实际问题的状态反馈增益矩阵k 的步骤为: (1)计算能控性矩阵Uc,判断系统是否能控; (2)根据闭环系统的期望极点计算系统的期望特征多项 式:
13.4 带观测器的状态反馈系统
13.4.1 系统的结构和状态空间表达式 带观测器的状态反馈系统由三部分组成,即原系统、观
测器和控制器,如图13-7所示。
第13章 线性定常系统的状态反馈和状态观测器设计
图13-7 带状态观测器的反馈系统
第13章 线性定常系统的状态反馈和状态观测器设计 设能控能观测的受控系统为
绍,下面就其特点和应用方面略加讨论。 (1)状态反馈与输出反馈的共同特点是:反馈的引入并不
最优控制问题的状态观测器设计
最优控制问题的状态观测器设计最优控制问题是指在某个系统中,通过对输入信号进行调节以使得某个性能指标达到最优的控制方法。
在实际应用中,由于受限于物理条件等因素,我们往往不能直接获取系统的全部状态信息,而只能通过一部分可观测的状态信息来进行控制。
而状态观测器则是一种用来估计系统未知状态的辅助装置,它基于已知的输入和观测值,通过数学模型计算得到对系统状态的估计值,并将其用于最优控制问题的解决。
在最优控制问题中,我们通常通过构建性能指标,使用最优化方法来求解控制输入的优化变量。
然而,这些优化方法通常需要精确的系统状态信息作为输入才能得到准确的优化结果。
而实际中,往往无法直接测量到系统的全部状态变量。
因此,为了解决这个问题,我们需要设计一种状态观测器来估计系统的未知状态,以便在最优控制问题中得到准确的结果。
状态观测器设计的目标是通过已知的输入信号和可观测的输出信号来估计系统的未知状态,使得估计值与实际值尽可能接近。
常见的状态观测器设计方法有卡尔曼滤波、扩展卡尔曼滤波和无迹卡尔曼滤波等。
其中,卡尔曼滤波是最常见的一种方法,它基于线性系统和高斯噪声的假设,能够较好地处理线性系统的状态估计问题。
卡尔曼滤波的基本原理是利用系统的状态方程和观测方程来建立一个状态估计模型。
状态方程描述了系统状态的演变规律,观测方程描述了观测量与系统状态之间的关系。
通过不断迭代计算,卡尔曼滤波器可以根据当前的观测值和上一时刻的状态估计值,得到当前时刻的最优状态估计值。
卡尔曼滤波器的设计包括两个关键步骤:预测步和更新步。
在预测步中,我们利用上一时刻的状态估计值和系统的状态方程来预测当前时刻的状态估计值。
在更新步中,我们将当前时刻的观测值与预测值进行比较,通过观测方程来修正状态估计值,从而得到更准确的估计结果。
通过不断迭代这两个步骤,我们可以逐渐趋近于系统的真实状态。
除了卡尔曼滤波器,还有其他一些高级的状态观测器设计方法,如无迹卡尔曼滤波器和扩展卡尔曼滤波器。
状态观测器设计
Chapter6 状态观测器设计在工程实际中能量测的信号只是系统的输出y ,而不是系统的内部状态。
有的状态变量是物理量,有的则不是物理量,因而状态变量未必都可以测量得到。
当状态不能全部量测时,我们就无法获得系统的状态信息,因而状态反馈在工程上就不能实现。
1964年,Luenberg er G D ⋅⋅(龙伯格)提出的“状态观测器”理论成功的解决了系统状态信息的获取问题。
Luenberg er G D ⋅⋅认为,当已知系统输入为u ,系统的输出为y ,他们必然与其内部状态x 有联系,也就是说我们应该能通过测量),(y u 对未知的状态量x 进行推论和估计。
“状态观测器”本质上是一个“状态估计器”(或称动态补偿器),其基本思路是利用容易量测的被控对象的输入u 和输出y 对状态进行估计(和推测)。
6.1 观测器设计考虑线性时不变系统Cx y Bu Ax x=+=,& (6-1) 基于(6-1)人为地构造一个观测器,观测器的输出为x ~,如果能满足 0)~(lim =-∞→x x t (6-2)则观测器的输出x ~可以作为内部状态)(t x 的估值,从而实现“状态重构-即重新构造“状态x ~”来作为“原状态x ”的估值。
观测器的输出x ~应该能由系统输入u 和系统输出y 综合而成(系统输入u 和系统输出y 在工程实际中容易检测到)。
∞→t 只是数学上的表述,实际工程中是很快的过程(<s 1)。
为了得到估计值x ~,一个很自然的想法是构造一个模拟系统 Bu x A x +=~~&,x C y ~~= (6-3) 用该模拟部件(6-3)去再现系统(6-1)。
因为模拟系统(6-3)是构造的,故x ~是可量测的信息,若以x ~作为x 的估值。
其估计误差为x x e -≡~,(6-3)减(6-1),满足方程 Ae e =& (6-4) 讨论:①若A 存在不具有负实部的特征值,Ae e=&将不会稳定,则当初始误差0)0(≠e ,即)0()0(~x x ≠时,有0)]()(~[lim ≠-∞→t x t x t ,这样x ~就不能作为x 的估计值,即Ae e =&不能作为一个观测器。
全维状态观测器的设计

全维状态观测器的设计全维状态观测器(Full State Observer)是一种常用于控制系统中的重要部件,用于获取系统的全部状态信息。
它通常是通过对系统的输入输出进行观测,并通过数学模型来估算系统的状态。
全维状态观测器的设计可以通过以下步骤来完成。
第一步是系统建模。
将所要观测的系统建立数学模型,可以采用物理方程或者数学模型的方式。
常见的数学模型包括状态方程和输出方程。
状态方程描述了系统状态的时间演变规律,输出方程则描述了系统输出与状态之间的关系。
这些方程可以通过系统的运动方程,控制方程和物理特性等来建立。
第二步是选择观测器类型。
全维状态观测器有多种类型,包括基本观测器、极点配置观测器和最优观测器等。
基本观测器是使用系统的状态方程和输出方程来估算系统状态的观测器,而极点配置观测器和最优观测器则是通过最小化误差来估算系统状态,从而提高观测器的精度。
合适的观测器类型应该根据控制系统的需求来选择。
第三步是计算观测器矩阵。
观测器矩阵是观测器中用来计算系统状态的矩阵。
它可以使用系统的状态方程和输出方程来计算。
观测器矩阵需要满足一些性质,例如它需要是可观测的,并且需要保证系统状态与观测器状态的误差最小。
第五步是实现观测器。
实现观测器需要将观测器矩阵和观测器增益输入到观测器中,并对观测器的输入输出进行校验。
一旦观测器被设计并实现,它就可以用于控制系统中,并用来估算系统的全部状态信息。
总之,全维状态观测器的设计是控制系统中的重要部件,可以极大地提高控制系统的精度和稳定性。
设计一个好的全维状态观测器需要仔细分析系统模型和观测器类型,计算观测器矩阵和观测器增益,并进行实现和调试。
状态反馈观测 设计

状态反馈观测设计状态反馈观测器是一种用于估计系统状态的控制器组件。
它通过测量系统的输出和输入,并使用状态方程对系统状态进行估计。
以下是一个详细精确的状态反馈观测器设计步骤:1. 确定系统的状态方程:首先,需要确定系统的状态方程,通常采用线性时不变系统表示。
状态方程可以表示为:x' = Ax + Buy = Cx + Du其中,x是系统的状态向量,u是系统的输入向量,y是系统的输出向量,A、B、C和D是系统的系数矩阵。
2. 设计状态反馈控制器:使用控制理论中的状态反馈控制器设计方法,根据系统的要求和性能指标,选择合适的状态反馈增益矩阵K。
状态反馈控制器的输出可以表示为:u = -Kx3. 设计状态观测器:状态观测器的目标是估计系统的状态向量x。
根据系统的输出和输入,可以使用以下观测器方程进行状态估计:x̂' = A x̂ + Bu + L(y - C x̂)其中,x̂是状态观测器的估计状态向量,L是观测器增益矩阵。
4. 确定观测器增益矩阵L:观测器增益矩阵L的选择可以使用线性二次调节器(LQR)设计方法,根据系统的要求和性能指标,通过求解代数矩阵方程来确定L。
5. 实施状态反馈观测器:将状态反馈控制器和状态观测器结合在一起,形成一个状态反馈观测器控制系统。
系统的输入通过状态反馈控制器计算得到,系统的输出通过状态观测器估计得到,从而实现对系统状态的估计和控制。
6. 优化观测器性能:根据实际应用需求,可以通过调整观测器增益矩阵L来优化观测器的性能,例如减小状态估计误差、提高状态估计的收敛速度等。
以上是一个详细精确的状态反馈观测器设计过程。
根据具体的系统和应用需求,可能需要进行一些额外的步骤或调整来优化控制系统的性能。
最优控制问题的状态观测器设计算法优化

最优控制问题的状态观测器设计算法优化最优控制问题的状态观测器是一种用于估计系统状态的重要技术。
在控制系统中,有时无法直接测量系统的状态变量,而只能通过测量输出变量来推测系统状态。
因此,设计一个有效的状态观测器对于实现最优控制至关重要。
本文将探讨最优控制问题的状态观测器设计算法优化的相关内容。
简介最优控制问题在许多领域中都有重要应用,如工业控制、机器人控制、飞行器控制等。
最优控制的目标是找到一种控制策略,使得系统在给定约束条件下达到最佳性能。
为了实现最优控制,需要对系统状态进行准确估计,这就需要设计一个高效的状态观测器。
状态观测器的概念状态观测器是一种通过对系统输出变量进行测量来估计系统状态的设备。
它基于系统的数学模型和观测方程来对状态进行预测和修正。
由于存在测量误差和模型误差,状态观测器的设计通常是一个优化问题。
传统状态观测器设计算法传统的状态观测器设计算法包括Kalman滤波器和扩展Kalman滤波器。
Kalman滤波器是线性系统的最优观测器,能够有效地处理高斯噪声。
扩展Kalman滤波器是对非线性系统的扩展,通过线性化模型来处理非线性问题。
传统算法在一定程度上能够实现状态的准确估计,但在处理非线性问题时存在局限性。
基于粒子滤波的状态观测器设计算法为了解决传统算法在处理非线性问题时的局限性,研究者们提出了基于粒子滤波的状态观测器设计算法。
粒子滤波器是一种非参数滤波方法,通过使用一组粒子来估计系统状态。
它通过对系统状态进行随机采样和重采样来逼近真实分布,并通过粒子的权重对状态进行修正。
相比传统算法,粒子滤波器在处理非线性问题时更加灵活准确。
算法优化为了进一步优化状态观测器设计算法,可以考虑以下几点:1. 粒子数目的选择:粒子滤波器的性能与粒子数目直接相关。
增加粒子数目可以提高滤波器的精度,但会增加计算量。
因此,需要在满足精度要求的前提下选择合适的粒子数目。
2. 采样策略的改进:采样策略决定了粒子的生成方式。
状态观测器设计
状态观测器设计利用状态反馈实现闭环系统的极点配置,需要利用系统的全部状态变量。
然而系统的状态变量并不都是能够易于用物理方法量测出来的,有些根本就无法量测;甚至一些中间变量根本就没有常规的物理意义。
此种情况下要在工程上实现状态反馈,就需要对系统的状态进行估计,即构造状态观测器。
状态观测器,是一个在物理上可以实现的动态系统,它利用待观测系统的可以量测得到的输入和输出信息来估计待观测系统的状态变量,以便用该组状态变量的估计值来代替待观测系统的真实状态变量进行状态反馈设计,实现闭环系统极点的再配置。
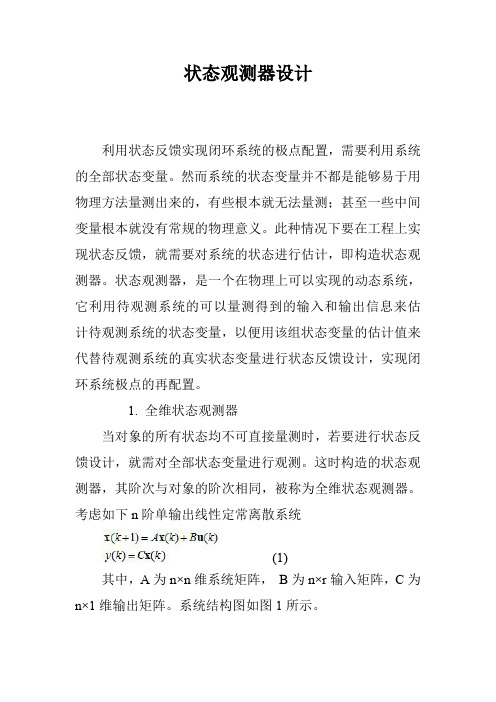
1. 全维状态观测器当对象的所有状态均不可直接量测时,若要进行状态反馈设计,就需对全部状态变量进行观测。
这时构造的状态观测器,其阶次与对象的阶次相同,被称为全维状态观测器。
考虑如下n阶单输出线性定常离散系统(1)其中,A为n×n维系统矩阵,B为n×r输入矩阵,C为n×1维输出矩阵。
系统结构图如图1所示。
图1 全维状态观测器构造一个与受控系统具有相同参数的动态系统(2)当系统(1)与(2)的初始状态完全一致时,则两个系统未来任意时刻的状态也应完全相同。
但在实际实现时,不可能保证二者初始状态完全相同。
为此,应引入两个系统状态误差反馈信号构成状态误差闭环系统,通过极点配置使误差系统的状态渐趋于零。
由于原受控系统状态不可直接量测,故用二个系统的输出误差信号代替。
引入了输出误差的状态观测器状态方程为(3)其中,H为状态观测器的输出误差反馈系数矩阵,有如下形式定义状态估计误差为,用式(7.65)与(7.67)相减可得(4)即(5)通过式(5)可以看出,若选择合适的输出误差反馈矩阵H 使得状态估计误差系统(5)的所有极点均位于z平面单位圆内,则误差可在有限拍内趋于零,即状态估计值在有限拍内可以跟踪上真实状态,且极点越靠近原点状态估计误差趋于零的速度越快,反之越慢。
可见,能否逼近x(k)以及逼近速度是由H阵决定的。
离散控制系统中的状态观测器设计

离散控制系统中的状态观测器设计离散控制系统是指系统的输入和输出是离散的,并且在时间上以离散的方式进行测量和控制。
状态观测器是离散控制系统中重要的组成部分,用于估计系统的状态变量,从而实现对系统的控制。
本文将介绍离散控制系统中状态观测器的设计方法及其应用。
一、状态观测器的概念和作用状态观测器是一种用于估计系统状态的装置或算法。
在离散控制系统中,通过观测系统的输出值和输入值,结合系统的数学模型,状态观测器能够推断出系统的状态变量,从而实现对系统的监测和控制。
状态观测器在离散控制系统中具有重要的作用。
首先,通过对系统状态的估计,可以实现对系统的运行状态的实时监测,减少故障的发生。
其次,状态观测器可以提供系统未知状态变量的估计值,从而实现对系统的控制。
因此,状态观测器在离散控制系统中具有广泛的应用。
二、状态观测器的设计方法状态观测器的设计方法可以分为两类:基于传统观测器设计方法和基于最优观测器设计方法。
1. 基于传统观测器设计方法基于传统观测器设计方法的核心思想是通过系统的输出值来估计系统的状态变量。
最常用的传统观测器设计方法有:(1)全阶观测器设计:全阶观测器是指观测器的状态向量与系统的状态向量具有相同的维数。
全阶观测器可以通过系统的输出值和输入值来准确地估计系统的状态变量。
(2)低阶观测器设计:低阶观测器是指观测器的状态向量比系统的状态向量的维数低。
低阶观测器设计方法通过将系统的状态变量投影到一个低维的观测空间中来实现对系统状态的估计。
2. 基于最优观测器设计方法基于最优观测器设计方法的核心思想是通过优化问题来设计状态观测器,使得估计误差最小。
最优观测器能够最大程度地准确估计系统的状态变量。
最常用的最优观测器设计方法是卡尔曼滤波器。
卡尔曼滤波器能够通过系统的输出值和输入值来估计系统的状态变量,并且可以自适应地调整观测器的参数,以最小化估计误差。
三、状态观测器的应用状态观测器在离散控制系统中有广泛的应用。
现代控制理论状态反馈和状态观测器的设计实验报告

现代控制理论状态反馈和状态观测器的设计实验报告本次实验是关于现代控制理论中状态反馈与状态观测器的设计与实现。
本次实验采用MATLAB进行模拟与仿真,并通过实验数据进行验证。
一、实验目的1、学习状态反馈控制的概念、设计方法及其在实际工程中的应用。
3、掌握MATLAB软件的使用方法。
二、实验原理1、状态反馈控制状态反馈控制是指将系统状态作为反馈控制的输出,通过对状态反馈控制器参数的设计,使系统的状态响应满足一定的性能指标。
状态反馈控制的设计步骤如下:(1) 确定系统的状态方程,即确定系统的状态矢量、状态方程矩阵和输出矩阵;(2) 设计状态反馈控制器的反馈矩阵,即确定反馈增益矩阵K;(3) 检验状态反馈控制器性能是否满足要求。
2、状态观测器(1) 确定系统的状态方程;(2) 设计观测器的状态估计矩阵和输出矩阵;(3) 检验观测器的状态估计精度是否符合标准。
三、实验内容将简谐信号加入单个质点振动系统,并对状态反馈控制器和状态观测器进行设计与实现。
具体实验步骤如下:1、建立系统状态方程:(1)根据系统的物理特性可得单自由度振动系统的运动方程为:m¨+kx=0(2)考虑到系统存在误差、干扰等因素,引入干扰项,得到系统状态方程:(3)得到系统状态方程为:(1)观察系统状态方程,可以发现系统状态量只存在于 m 行 m 到 m 行 n 之间,而控制量只存在于 m 行 1 到 m 行 n 之间,满足可控性条件。
(2)本次实验并未给出状态变量的全部信息,只给出了系统的一维输出,因此需要设计状态反馈器。
(3)我们采用极点配置法进行状态反馈器设计。
采用 MATLAB 工具箱函数,计算出极点:(4) 根据极点求解反馈矩阵,得到状态反馈增益矩阵K:(1)通过矩阵计算得到系统的可观性矩阵:(2)由若干个实测输出建立观测器,可将观测器矩阵与可观测性矩阵组合成 Hankel 矩阵,求解出状态观测器系数矩阵:(3)根据系统的状态方程和输出方程,设计观测方程和状态估计方程,如下:4、调试控制器和观测器(1)经过上述设计步骤,将反馈矩阵和观测矩阵带入 MATLAB 工具箱函数进行仿真。
设计状态观测器

第一题说明状态观测器的目的,以
及设计状态观测器的原则
当利用状态反馈配置极点时,需用传感器测量状态变量以便实现反馈,但通常只有被控对象的输入量和输出量能用传感器测量,多数状态变量不易或不能测量,于是提出了利用被控对象的输入量和输出量建立状态观测器来重构状态的思想。
但是,被控对象的初始状态很可能很不同,模拟系统中积分器的初
始条件又只能预估,因而两个系统的初始状态总有差异,即使两个系统
的ABC阵完全一样(通常不可能),也必定存在估计状态与被控对象实
际状态的误差(x^-x),难以实现所需要的状态反馈。
但估计状态与被控对象实际状态的误差存在,
必然导致(y^-y)存在,可以根据反馈原理将(y^-
y)反馈至估计状态微分处
6
可以将状态观测器看为两个输入(u,y),输出为x^的系统观测器正常工作的条件(t→∞)(x^(t)-x(t))=0
要求A-HC特征值具有负实部
注意:选择H阵参数时,应防止数值过大带来的
实现困难,通常希望观测器响应速度比状态反
馈系统的响应速度要快些。
第二题状态反馈配置极点是否唯一?
为什么?举例说明?
9
对于单输入系统,被配置极点确定时,K唯一
对于多输入系统,被配置极点确定时,K阵不唯一。
其原因在于K阵是一个p×n的矩阵,共有个p×n未知数,而方程只有n个,当p=1时,未知数等于方程数,解唯一,当p>1时,未知数>方程数解不唯一
结论
THANK YOU!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验四 状态观测器的设计
一、实验目的
1. 了解和掌握状态观测器的基本特点。
2. 设计状态完全可观测器。
二、实验要求
设计一个状态观测器。
三、实验设备
1. 计算机1台
2. MATLAB6.X 软件1套
四、实验原理说明
设系统的模型如式(3-1)示。
p m n R y R u R x D Cx y Bu Ax x ∈∈∈⎩⎨⎧+=+= (3-1)
系统状态观测器包括全维观测器和降维观测器。
设计全维状态观测器的条件是系统状态完全能观。
全维状态观测器的方程为:
Bu y K z C K A z
z z ++-=)( (3-2) 五、实验步骤
已知系数阵A 、B 、和C 阵分别如式(3-4)示,设计全维状态观测器,要求状态观测器的极点为[-1 -2 -3]上
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=234100010A ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡-=631B []001=C (3-4) 设计全维状态观测器,要求状态观测器的极点为[-1 -2 -3]。
对系统式(3.4)所示系统,用MATLAB 编程求状态观测器的增益阵K z =[k1 k2 k3]T
程序:
%实验4
A=[0 1 0;0 0 1;-4 -3 -2];
B=[1;3;-6];
C=[1 0 0];
D=[0];
[num,den]=ss2tf(A,B,C,D,1); %求出原系统特征多相式denf=[-1 -2 -3]; %希望的极点的特征多相式
k1=den(:,1)-denf(:,1)
k2=den(:,2)-denf(:,2) %计算k2=d2-a2
k3=den(:,3)-denf(:,3) %计算k3=d3-a3
Kz=[k1 k2 k3]'
运行结果:
k1 =
2
k2 =
4.0000
k3 =
6.0000
Kz =
2.0000
4.0000
6.0000。