发那科机器人外部信号启动
FANUC机器人操作指南

FANUC机器人操作指南1.机器人启动和关机步骤1:确认机器人和控制箱的电源已经连接好,确保电源开关处于关闭状态。
步骤2:打开机器人控制箱的电源开关,并等待系统自检完成。
步骤3:打开机器人外部控制器的电源开关。
步骤4:通过外部控制器的操作界面,启动机器人系统。
步骤5:机器人启动完成后,进行相关安全检查,确保安全栅门和急停按钮处于正常工作状态。
步骤6:进行机器人的关机操作时,先按下外部控制器上的停止按钮,然后按下机器人控制箱上的关机按钮。
2.示教及程序运行步骤1:将机器人切换到手动模式,通过示教器进行机器人的示教操作。
步骤2:通过示教器输入机器人运动的各个参数,如速度、位置等。
步骤3:示教完成后,将机器人切换到自动模式。
步骤4:通过外部控制器的操作界面,加载并运行机器人的程序。
步骤5:在程序运行过程中,及时观察机器人的运动状态,确保其正常运行。
步骤6:如有需要,可以通过外部控制器的操作界面对机器人进行实时监控和干预。
3.安全注意事项为保障操作人员的安全,使用FANUC机器人时需要注意以下事项:1)在机器人运行时,人员应与机器人保持一定的安全距离,并避免将手部或其他物体靠近机器人工作区域。
2)在启动机器人前,需要确保安全栅门和急停按钮处于正常工作状态。
3)在机器人运行过程中,不得随意打开安全栅门或触动急停按钮。
4)在操作机器人时,注意避开机器人的运动轨迹,避免被机器人工具或其他部件碰撞。
以上是关于FANUC机器人操作的简要介绍,通过掌握基本的操作流程和注意事项,能够更好地使用和管理FANUC机器人,提高生产效率和安全性。
FANUC 机器人由PLC控制外部自动启动,暂停。

本文介绍了FANUC机器人由PLC外部控制自动启动,暂停,再启动的工作流程。
包含PLC程序和机器人的设定工作流程1.UI1 和UI2一直为ON后 ,延时0.5S UI3一直为ON2,延时0.5s后,UI8一直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器人不在暂停状态 第一次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器人不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后 如果机器人不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器人不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器人在暂停状态 启动后又暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后 。
如果机器人在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器人示教器设定机器人启动方式有2种,其实没什么区别,其实根据情况选择,8个机器人输入信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪一种启动方式2.正常状态如下3.系统设定第一步======1.专用外部信号==启动2.所选程序的调用PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种方式其一PNS==========================================RSR=====================================机器人点位介绍机器人正常启动后的状态如下 可以参考。
Fanuc外部信号选择PNS程序和RSR程序启动运行
Fanuc机器人程序自动运行,这里是外部信号选择PNS程序和RSR程序启动运行,本文做了举例运行,且加入详细说明,篇幅有点长,约11400字,需30分钟阅读。
说明:这里主要了解Fanuc机器人的自动运行条件,选择PNS、RSR程序名的启动方式,通过外部IO选择不同PNS和RSR程序并启动运行。
具体的一些操作步骤和过程,需要去机器人上面进行验证。
做此文时候,回来才发现此篇幅有点长,欢迎大家耐心观看阅读,以后尽量把文章篇幅做短一些。
一、自动运行条件和系统变量设定1、Fanuc机器人自动运行条件设定(1)TP示教器开关置于OFF;(2)通过示教器上step切换为连续运行状态;(3)控制柜钥匙开关打到AUTO模式;(4)专用信号UI[1]-UI[3]都设定为ON;(5)专用信号UI[8]*ENBL为ON,切换开关;(6)在设定当中,设定自动模式为REMOTE(远程模式)Menu菜单——>0next下一页——>6system系统——>F1type类型——>config配置——>Remote/Local setup选择远程模式;(7)系统变量$RMT_MASTER为0(默认值是0),即menu菜单——>0 next下一页——>6system系统——>F1type类型——>Variables变量——>$RMT_MASTER设为0说明:系统变量$RMT_MASTER定义下列远端设备0:外围设备1:显示器/键盘(CRT/KB)2:主控计算机3:无外围设备(无遥控装置)2、自动运行功能说明自动运转是从遥控装置通过外围设备I/O输入来启动程序的一种功能,具有如下功能。
(1)机器人启动请求(RSR)功能,根据机器人启动请求信号(RSR1~8输入)选择并启动程序。
程序处在执行中或暂停中的情况下,所选程序进入等待状态,等待当前执行中的程序结束后又被启动。
(2)程序号码选择(PNS)功能,根据程序号码选择信号(PNS1~8输入、PNSTROBE输入)选择程序。
发那科机器人外部信号启动

问题一:外部信号无法正常接收
总结词:当发那科机器人无法正常接收 外部信号时,可能是由于信号传输问题 、接口故障或配置错误等原因。
检查发那科机器人的配置参数,确保外 部信号的接收参数设置正确。
检查接口是否正常工作,如接口损坏或 接触不良,需要更换或修复。
详细描述
检查信号传输线是否完好,有无断裂或 接触不良的情况。
外部信号定义
外部信号是指通过外部设备或控制器 发送给发那科机器人的启动指令,用 于控制机器人的启动和停止。
外部信号的作用
外部信号在机器人控制系统中起着至 关重要的作用,它能够实现远程控制 、自动化流程控制、安全保护等功能 ,提高生产效率和安全性。
发那科机器人如何接收外部信号
信号接收方式
发那科机器人通过串行通信接口(如 RS-232、RS-485)或网络通信接口 (如EtherNet/IP、Profinet)接收 外部信号。
THANKS
感谢观看
和高可靠性。
易编程
发那科机器人提供易于 使用的编程软件,降低 工程师的编程难度,缩
短调试周期。
模块化设计
发那科机器人的机械臂 采用模块化设计,方便 维修和替换,降低维护
成本。
良好的人机交互
发那科机器人具有友好 的人机界面,方便操作 员监控和调整机器人的
运行状态。
02
发那科机器人外部信号 电子电器行 业的组装、检测、包装等环节 ,提高生产效率和产品质量。
金属加工
发那科机器人在金属加工领域 实现高效、精准的切割、焊接
、抛光等操作。
食品包装
发那科机器人在食品包装领域 用于自动化生产线,实现快速
、卫生的包装作业。
发那科机器人的优势与特点
Fanuc机器人IO配置和UIUO配置

个数:512/512个数:100/100,范围:0-32767 个数:64/64,范围:0-16383Fanuc 机器人IO 配置和UI/UO 配置说明:这几天直接跳转发送Fanuc 部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc 机器人的IO 分类以及CRMA15、CRMA16的IO 分配,UI/UO 的分配。
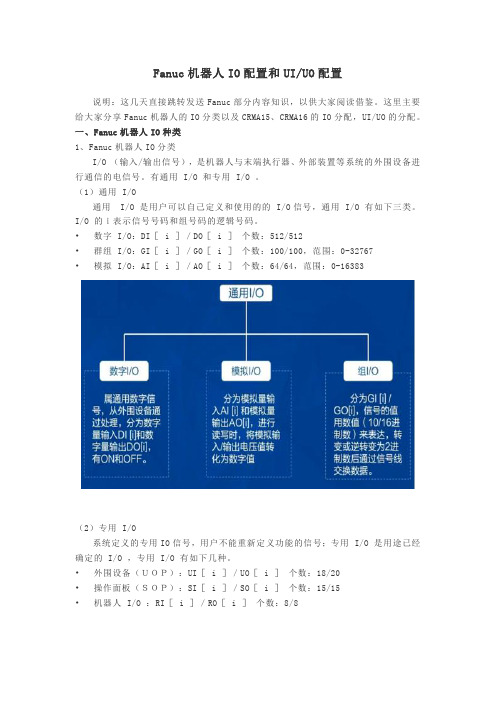
一、Fanuc 机器人IO 种类1、Fanuc 机器人IO 分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用I/O 和专用I/O 。
(1)通用I/O通用I/O 是用户可以自己定义和使用的的I/O 信号,通用I/O 有如下三类。
I/O 的i 表示信号号码和组号码的逻辑号码。
・ 数字I/O :DI:i]/DO[i] ・ 群组I/O :GI:i]/GO[i] ・模拟I/O :AI:i]/AO[i](2)专用I/O系统定义的专用IO 信号,用户不能重新定义功能的信号;专用I/O 是用途已经确定的I/O ,专用I/O 有如下几种。
外围设备(UOP ):UI: i] /UO : i]个数:18/20 操作面板(SOP ): SI: i] /SO : i]个数:15/15・机器人I/O:RI:i]/RO[i]个数:8/8IWAI/O 外围设备I/O擾作面洌0 机霜人1/0是址曲机器人'作为未端执行器I怕被使用的机嚣人数字信号.»为机聶人输入信号Rl [i]和机器人输出信跑ih (UI/UO),是在系鸵中已经输逮了其用遼的专用悟号。
分为外国设畠输入店号」网和外菊设备输出营号UO(ih擾件面板IO宗用来逆行換作面慣“摂作务的按fflWLEDWSBB交按的数字专用(S号.分为输人信号别i]和輪出信号SODb [专用I/O]3、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯10模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O模块的硬件的种类。
发那科外部启动
外部启动
发那科外部启动需要满足三个条件,且开通顺序间隔0.1S最少。
1.使能打开,暂停关闭
2.选择RSR0001程序号
3.启动
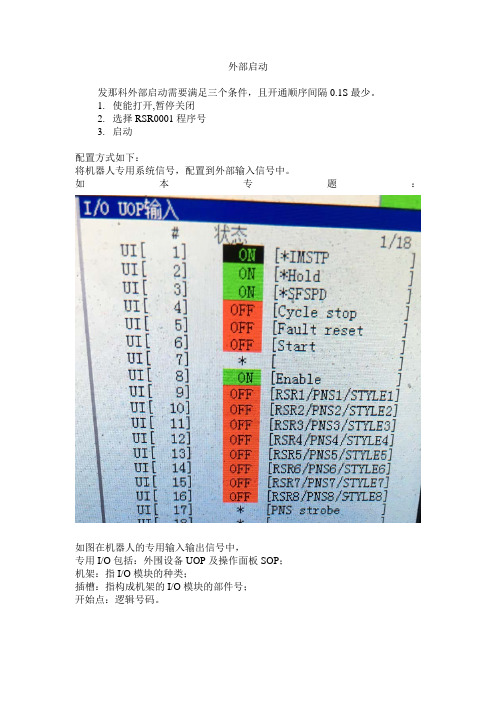
配置方式如下:
将机器人专用系统信号,配置到外部输入信号中。
如本专题:
如图在机器人的专用输入输出信号中,
专用I/O包括:外围设备UOP及操作面板SOP;
机架:指I/O模块的种类;
插槽:指构成机架的I/O模块的部件号;
开始点:逻辑号码。
官方释义:
具体更更多资料见官方说明书3-3.
如果下载不到请联系:
启动步骤:
这里表述使用送的IO模块作为外部启动,上图中非本项目图。
CRMA15,CRMA16作为启动触发。
1.UI1 IMSTP和UI3 SFSPD先配置成awayson
2.UI2和UI8上电保持ON,如果UI2断开表示机器人减速停止,再启动则接通UI6即可。
3.选择RSR程序,如选择RSR0001(程序名字必须是这样的格式,最多支持8个)UI9 置ON,上升沿有效,启动后可以复位掉。
4.启动机器人程序UI6置ON,上升沿有效最小脉宽32ms。
5.按照2,3,4中的步骤依次通电即可启动机器人。
最后配置UI配置映射到DI中,同时DI配置CRMA15,CRMA16。
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
Fanuc外部信号选择PNS程序和RSR程序启动运行

Fanuc机器人程序自动运行,这里是外部信号选择PNS程序和RSR程序启动运行,本文做了举例运行,且加入详细说明,篇幅有点长,约11400字,需30分钟阅读。
说明:这里主要了解Fanuc机器人的自动运行条件,选择PNS、RSR程序名的启动方式,通过外部IO选择不同PNS和RSR程序并启动运行。
具体的一些操作步骤和过程,需要去机器人上面进行验证。
做此文时候,回来才发现此篇幅有点长,欢迎大家耐心观看阅读,以后尽量把文章篇幅做短一些。
一、自动运行条件和系统变量设定1、Fanuc机器人自动运行条件设定(1)TP示教器开关置于OFF;(2)通过示教器上step切换为连续运行状态;(3)控制柜钥匙开关打到AUTO模式;(4)专用信号UI[1]-UI[3]都设定为ON;(5)专用信号UI[8]*ENBL为ON,切换开关;(6)在设定当中,设定自动模式为REMOTE(远程模式)Menu菜单——>0next下一页——>6system系统——>F1type类型——>config配置——>Remote/Local setup选择远程模式;(7)系统变量$RMT_MASTER为0(默认值是0),即menu菜单——>0 next下一页——>6system系统——>F1type类型——>Variables变量——>$RMT_MASTER设为0说明:系统变量$RMT_MASTER定义下列远端设备0:外围设备1:显示器/键盘(CRT/KB)2:主控计算机3:无外围设备(无遥控装置)2、自动运行功能说明自动运转是从遥控装置通过外围设备I/O输入来启动程序的一种功能,具有如下功能。
(1)机器人启动请求(RSR)功能,根据机器人启动请求信号(RSR1~8输入)选择并启动程序。
程序处在执行中或暂停中的情况下,所选程序进入等待状态,等待当前执行中的程序结束后又被启动。
(2)程序号码选择(PNS)功能,根据程序号码选择信号(PNS1~8输入、PNSTROBE输入)选择程序。
发那科机器人外部信号启动
发那科外部信号启动
【正文】
一、引言
本文档旨在介绍如何使用发那科外部信号启动功能。
该功能允许通过外部信号来控制发那科的启动和停止操作,以满足特定的应用需求。
二、前提条件
在开始操作之前,请确保满足以下前提条件:
1:发那科已经正确安装并连接到电源;
2:了解并熟悉发那科的基本操作和安全规范;
3:已经准备好外部信号源。
三、操作步骤
1:将外部信号源连接到发那科的输入端口。
请参考发那科用户手册查找正确的输入端口;
2:在控制界面上,进入设置菜单,并选择启动设置选项;
3:在启动设置界面上,找到外部信号启动选项,将该选项设置为启用;
4:根据外部信号源的要求,设置合适的参数,例如触发方式、触发电平等;
5:完成设置后,保存并退出设置菜单;
6:现在,当外部信号源触发时,发那科将会启动。
四、注意事项
在使用发那科外部信号启动功能时,请注意以下事项:
1:确保外部信号源的稳定性和可靠性,避免误操作或干扰;
2:遵循发那科的安全操作规范,确保操作人员和设备的安全;
3:在操作过程中,及时监控的运行状态,确保其正常工作;
4:如有需要,随时可以通过外部信号源停止发那科的运行。
五、附件
本文档附带的附件如下:
1:发那科外部信号启动接口图示。
六、法律名词及注释
1:外部信号源:指从发那科外部接收到的触发信号,用于控
制的启动和停止。
2:输入端口:上用于接收外部信号的接口。
【结束】。
FANUC机器人操作入门:难倒大多数人的IO配置怎么搞?(4)

FANUC机器人操作入门:难倒大多数人的IO配置怎么搞?(4)特别说明:要说FANUC和ABB机器人差异性比较大的地方,I/O配置算是其中一个,就算有ABB基础的同学也需要认真学习。
FANUC官方手册虽有说明,但很多人一时半会也理不清。
ABB创建信号,需要先创建板卡,再创建信号。
而FANUC机器人信号都已经创建好了,只需要进行正确分配即可。
关于FANUC机器人信号配置步骤,上节课分享给大家的《FANUC操作手册》(点击了解)有详细的说明,今天分享《R-30iB 控制柜维修说明书》给大家,里面有很多实用说明,可以关注“工业机器人教学”微信公众号,回复“R-30”了解。
说明书领取方法具体步骤1.长按下方二维码识别关注或微信关注公众号 RobotPlayers(工业机器人教学)2.进入公众号,点击左下角的键盘图标,到聊天界面3.就像和朋友聊天一样,输入关键字“R-30”,然后按下发送4.按照提示进行操作,立即获得《R-30iB控制柜维修说明书》!FANUC I/O种类FANUC分有通用I/O和专用I/O,通用IO用户可以自己定义,而专用IO是系统已经确定的IO,用户无法进行定义。
1.通用IO数字I/O:DI[i]/DO[i],个数:512/512群组 I/O:GI[i]/GO[i] ,个数:100/100,范围:0-32767模拟 I/O:AI[i]/AO[i] 个数:64/64,范围:0-16383说明:FANUC通用IO和ABB用途一致,只不过FANUC数字I/O用ON和OFF表示状态变化,ABB用1和0表示状态变化。
2.专用IO外围设备I/O(UOP):UI[i]/UO[i] 个数:18/20操作面板I/O(SOP):SI[i]/SO[i] 个数:15/15机器人 I/O :RI[i]/RO[i] 个数:8/8说明:操作者面板输入/输出SI[ i ] / SO[ i ] 和机器人输入/输出RI[ i ] / RO[ i ] 为硬线连接,不需要配置。
发那科PROFINET弧焊机器人设置 - 最全版
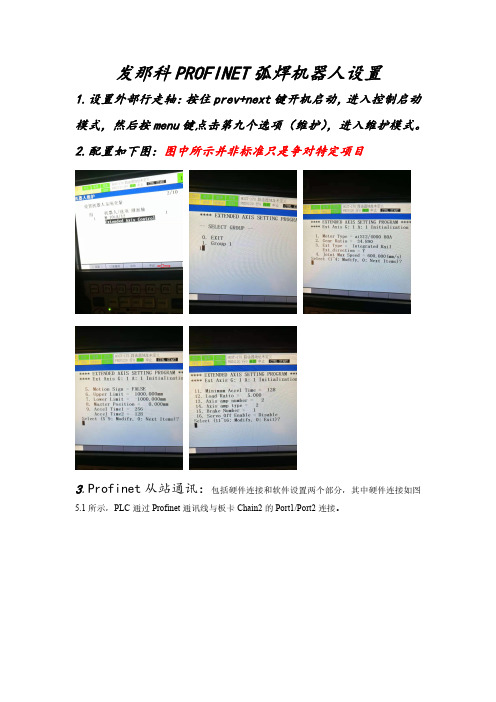
发那科PROFINET弧焊机器人设置1.设置外部行走轴:按住prev+next键开机启动,进入控制启动模式,然后按menu键点击第九个选项(维护),进入维护模式。
2.配置如下图:图中所示并非标准只是争对特定项目3.Profinet从站通讯:包括硬件连接和软件设置两个部分,其中硬件连接如图5.1所示,PLC通过Profinet通讯线与板卡Chain2的Port1/Port2连接。
图5.1从站通讯时连接的Port端口软件设置包括三个部分:Address settings、Switch settings(一般默认,不进行更改)、IO-Device。
具体步骤如下所示:TP中进入Profinet设置画面。
步骤:MENU→I/O→PROFINET(M)。
将Chain1DISABLE,保证Chain2ENABLE(设置后Chain1的图标变灰,Chain2的图标变亮)。
如图5.2所示根据客户需求设置Address settings的内容,包括:机器人的IP地址、子网网关、名称。
(通过TP上“Disp”键进行左右屏幕切换)图5.2Address settings设置如图5.3所示根据客户需求设置IO-Device的内容,包括Slot Type、Slot Size两部分。
点DISP 按钮将光标移到右面的窗口,点上下按钮,将光标移到Slot1上。
点EDIT(F4)按钮,打开Slot1的设定画面如图5.4所示,在Slot1设定画面,将光标移到SlotType上,点EDIT按钮,弹出型号选择窗口,选择Input Output slot,点APPLY按钮。
将Slot1设定成输入/输出模块,同理按照相同步骤将Slot Size设置为32bytes(即:DI DO分别为32bytes)回到图5.3IO-Device 设置界面,选择F1SAVE,然后重启,设置生效。
图5.3IO-Device设置图5.4Slot Type设置(此处为从相关文件中借用的图片)PLC侧的设置:客户现场的PLC技术人员在step7中(以西门子PLC为例)导入机器人的GSD文件,设置机器人的IP地址、子网网关、名称、输入/输出字节数(与机器人侧的设置相同),然后下载。
发那科机器人外部信号启动

2)依次分配好信号值(RANGE)、机架(RACK)、插槽 (SLOT)、开始点(START)
3)切换到UO继续分配完毕,重启机器人。 重启后状态(ST号一览
(允许机器人移动时为ON)
2018/5/22
2018/5/22
4
二,设置HOME点,让PLC知道机器人准备好
2018/5/22
15
四,
2018/5/22
16
2018/5/22
17
2018/5/22
18
2018/5/22
19
2018/5/22
20
2018/5/22
21
2018/5/22
22
2018/5/22
23
2018/5/22
24
2018/5/22
25
2018/5/22
26
2018/5/22
外部启动机器人
-FANUC
重庆蓝姆电气部 By-HaiPeng
2018/5/22
一,配置UOP信号
1)依次按键操作:MENU—SETUP—I/O—UOP,F2切换到 CONFIG状态(按F3IN/OUT切换输入输出信号到UI)
#
1
RANGE
UI [ 1- 18]
RACK
82
SLOT
1
START
1
STAT
2018/5/22 13
2018/5/22
14
• 专用外部信号开启 Menu-0 next-6 system-F1 type-config-Enable UI signals • 再开外部信号开启
Menu-0 next-6 system-F1 type-config-START for CONTINUE only
发那科机器人外部信号启动

外部启动机器人
-FANUC
2020/1/24
重庆蓝姆电气部 By-HaiPeng
11
设定位置寄存器(PR)中的HOME位置
Ref Position点记录后不要移动机器人 依次按键:DATA—F1—PR进入位置寄存器,选择第一项按 SHIFT+F5记录
2020/1/24
12
三,
暂停程序: 暂停信号(HOLD)中断时暂停正在运行的程序
紧急停止程序: 紧急停机信号(IMSTP)中断时紧急停机
3)切换到UO继续分配完毕,重启机器人。 重启后状态(STAT)为ACTIV则信号正常
2020/1/24
信号一览
2020/1/24
(允许机器人移动时为ON)
2020/1/24
4
二,设置HOME点,让PLC知道机器人准备好
当机器人在原点(安全位置)时,给PLC发送UO[7](AT PERCH) 信号。
允许移动机器人: 使能信号(EnaBle)为ON时允许移动
2020/1/24
13
2020/1/24
14
• 专用外部信号开启
Menu-0 next-6 system-F1 type-config-Enable UI signals • 再开外部信号开启
Menu-0 next-6 system-F1 type-config-START for CONTINUE only
27
此课件下载可自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我联系删除!
发那科机器人外部信号启动

发那科外部信号启动发那科外部信号启动1.引言在使用发那科进行自动化操作时,有时需要通过外部信号来启动的动作。
本文档将详细介绍如何通过外部信号启动发那科,并提供相关的操作步骤和注意事项。
2.硬件配置在开始操作前,确保以下硬件已正确配置和连接:- 发那科:确保已正确安装并接通电源。
- 控制器:确保控制器已正确连接到,并与电源和外部信号源相连。
- 外部信号源:准备一个外部信号源,例如开关、传感器或PLC。
3.软件设置在控制器上进行以下软件设置:1) 打开控制器的用户界面。
2) 进入信号配置界面。
3) 配置外部信号输入端口:指定一个可用的输入端口来接收外部信号。
4) 配置信号触发条件:指定何时触发动作,例如上升沿、下降沿或稳定状态。
5) 配置动作:指定要执行的动作,例如运动到指定位置、抓取物体或释放物体。
4.外部信号启动动作操作步骤以下是通过外部信号启动发那科动作的操作步骤:1) 确保外部信号源已正确连接到控制器的外部信号输入端口。
2) 启动控制器,并进入外部信号配置界面。
3) 检查外部信号源是否正常工作,确保信号源可以触发控制器接收到信号。
4) 配置信号触发条件,确保将在正确的信号触发条件下执行动作。
5) 配置动作,指定将执行的具体动作。
6) 测试外部信号启动动作:手动触发外部信号源,观察是否正确执行配置的动作。
5.注意事项在使用外部信号启动动作时,需要注意以下事项:- 确保外部信号源与控制器的输入端口连接正确且稳定。
- 仔细配置信号触发条件,确保将在正确的信号触发条件下执行动作。
- 在测试过程中,确保周围环境安全,以防意外动作引发伤害。
附件:- 基于发那科的外部信号启动操作手册法律名词及注释:1.外部信号源:指与控制器相连的外部设备,用于触发动作的信号源,例如开关、传感器或PLC。
2.信号触发条件:指在接收到外部信号时,将执行动作的条件,如上升沿、下降沿或稳定状态。
3.动作:指根据接收到的外部信号执行的具体动作,如运动到指定位置、抓取物体或释放物体。
FANUC机器人程序自动启动介绍

1
第一部分
自动运行方式的定义
程序启动类型 系统信号的定义
2
常用的自动运行方式:
程序启动类型
RSR(Robot Service Request) 机器人服务请求方式
PNS(Program NO. Select) 机器人程序编号选择启动方式
3
系统信号定义
• 所需启动的机器人程序可以使用外部控制设备如PLC等通过信号的输 入、输出来选择和执行。
6
RSR、PNS运行启动条件
UI信号设置为有效
7
RSR、PNS运行启动条件
自动模式为REMOTE
8
RSR、PNS运行启动条件
7.系统变量$RMT_MASTER为0(默认值为0)
9
自动运行需使用的系统信号
• 选择自动运行所执行程序的信号
自动运行的方式
RSR PNS
涉及的信号
UI
UO
UI[9]-UI[16]
13
RSR启动方式的命名要求
Eg: 条件:基数=100 调用RSR0121程序
UI信号 RSR1 RSR2 ON RSR3 RSR4
RSR48
程序号 0121
RSR程序名 RSR0121
14
RSR程序启动时序图
RSR启动方式的时序要求
15
PNS启动方式的定义与特点
自动运行方式:PNS 通过机器人服务请求信号(PNS1-PNS8和PNSTROBE)选择程序。
特点: 1.当一个程序正在执行或者中断时,这些信号被忽略; 2.自动开始操作信号(PROD_START):从第一行开始执行被选中的程 序,当一个程序被中断或执行时,这个信号不被接收; 3.最多可以选择255个程序。
发那科机器人外部信号启动课件

在外部信号启动方案中,加 强安全防护措施。如:设置 急停按钮,确保在紧急情况 下能够迅速停止机器人运动 ;添加信号异常检测功能, 及时发现并处理信号异常问 题,保证生产安全。
实例应用效果评估和改进方向
效果评估
经过实际应用验证,外部信号启动方案能够 满足汽车生产线的高效、精准生产需求。机 器人启动迅速、运行稳定,与其他设备协同 工作良好,提高了整体生产效率和质量。
分类
根据机器人的用途和结构,可分为 工业机器人、服务机器人、特种机 器人等。
发那科机器人应用领域介绍
制造业 物流业 医疗行业 其他领域
发那科机器人在制造业中应用广泛,包括自动化生产线、装配 线、焊接、切割、喷涂等领域,能够提高生产效率和产品质量
。
发那科机器人可用于自动化仓库、配送中心、运输等环节,实 现货物的快速、准确、高效搬运。
THANKS
感谢观看
应用场景
在汽车生产线上,发那科机器人需要与其他 设备协同工作,完成车身焊接、涂装等工艺 流程。通过外部信号启动机器人,可以与其 他设备实现精准配合,提升整体生产效率。
外部信号启动方案设计和实施过程
信号类型选择
硬件连接
软件配置
安全防护
根据实际需求,选用数字量 输入信号作为外部启动信号 ,通过PLC等设备发出指令 ,实现机器人的启动和停止 。
本课程面向广大工业机器人用户 ,特别是需要使用发那科机器人 的用户,包括生产线工人、技术 人员、工程师等。
课程大纲简介
第一部分
外部信号启动技术概述。介绍外 部信号启动技术的概念、原理和 应用场景,为后续内容打下基础
。
第二部分
外部信号启动硬件连接。详细介 绍外部信号启动的硬件连接方式 、接线方法和注意事项,确保用
KUKA机器人外部启动配置信号
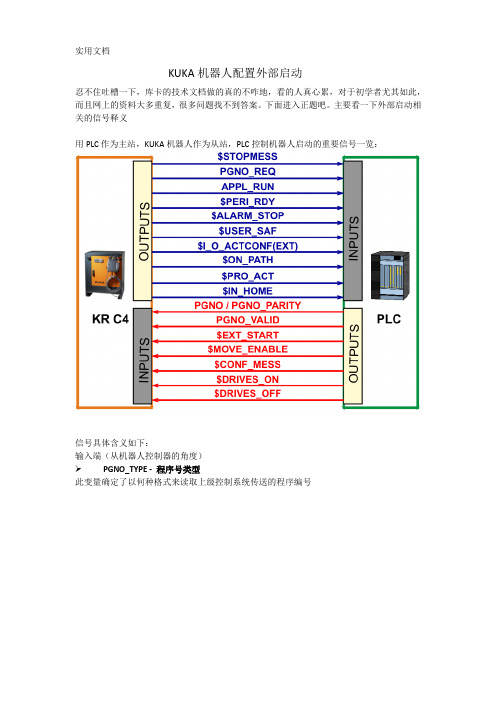
KUKA机器人配置外部启动忍不住吐槽一下,库卡的技术文档做的真的不咋地,看的人真心累,对于初学者尤其如此,而且网上的资料大多重复,很多问题找不到答案。
下面进入正题吧。
主要看一下外部启动相关的信号释义用PLC作为主站,KUKA机器人作为从站,PLC控制机器人启动的重要信号一览:信号具体含义如下:输入端(从机器人控制器的角度)➢PGNO_TYPE - 程序号类型此变量确定了以何种格式来读取上级控制系统传送的程序编号* 采用这种传递格式时,未对PGNO_REQ、PGNO_PARITY 以及PGNO_VALID 的值进行分析,因此无意义。
一般情况下设该值为1,符合大多数读写习惯➢PGNO_LENGTH - 程序号长度此变量确定了上级控制系统传送的程序编号的位宽。
值域:1 …16。
若PGNO_TYPE 的值为2,则只允许位宽为4、8、12 和16。
程序号变量所占用得地址宽度,例如设为8,则PGNO变量占一个BYTE➢PGNO_PARITY - 程序号的奇偶位上级控制系统传递奇偶位的输入端。
如果PGNO_TYPE 值为3,则PGNO_PARITY 不被分析。
这个没看太明白,但是不能胡乱设置,会影响程序号的传递。
目前设成0没发现问题➢PGNO_VALID - 程序号有效上级控制系统传送读取程序号指令的输入端。
这个信号别看太多了,只要知道是占用1bit的开关量信号就行了,在机器人启动并给定程序号后,发送该信号给机器人,相当于确认信号。
(忍不住也吐槽一下,就一个位信号,他这表格里说的正值,负值和0是指哪个,不明白唉)➢$EXT_START - 外部启动这个就简单直白了,启动信号,上升沿有效,可以给出去一段时间后撤销。
➢$MOVE_ENABLE - 允许运行由PLC给机器人的,配置Profinet后,该信号是机器人运动的必要前提条件,不管是EXT 模式还是T1模式,该信号必须给定并保持。
➢$CONF_MESS - 确认信息提示上升沿有效,相当于故障复位信号。
发那科机器人外部信号启动

发那科机器人外部信号启动在当今的工业生产领域,机器人的应用日益广泛,发那科机器人以其出色的性能和稳定性备受青睐。
其中,通过外部信号启动发那科机器人是实现自动化生产流程中的一个重要环节。
首先,我们来了解一下什么是发那科机器人的外部信号。
简单来说,外部信号就是来自机器人系统之外的控制指令,这些指令可以触发机器人执行特定的动作或任务。
外部信号的来源多种多样,可能是其他设备、传感器、控制系统等。
那么,为什么要使用外部信号来启动发那科机器人呢?这主要是为了实现整个生产系统的协同工作和自动化控制。
想象一下,在一个复杂的生产线上,如果每个环节都需要人工去逐一操作机器人,那不仅效率低下,而且容易出错。
而通过外部信号启动,机器人可以根据预设的条件和指令,自动地与其他设备进行配合,从而大大提高生产效率和质量。
要实现发那科机器人的外部信号启动,我们需要一些必要的硬件和软件支持。
在硬件方面,通常需要连接相应的信号输入设备,如数字输入模块、模拟输入模块等。
这些设备负责将外部的信号转换为机器人能够识别的格式。
在软件方面,需要对机器人的控制系统进行配置和编程。
这包括设置信号的类型、地址、触发条件等参数。
编程过程需要一定的专业知识和经验,以确保机器人能够准确地响应外部信号,并执行正确的动作。
接下来,让我们详细探讨一下外部信号的类型。
常见的外部信号有数字信号和模拟信号。
数字信号通常只有两种状态,即“开”和“关”,可以表示简单的指令,如启动、停止等。
模拟信号则可以是连续变化的,例如可以用来传递速度、位置等信息。
在实际应用中,如何根据具体的需求选择合适的外部信号类型呢?如果只需要简单的控制指令,数字信号就足够了。
但如果需要更精确的控制,比如调整机器人的运动速度或位置,那么模拟信号可能更合适。
当外部信号输入到发那科机器人后,机器人的控制系统会对这些信号进行处理和判断。
如果信号符合预设的启动条件,机器人就会开始执行相应的任务。
在这个过程中,系统的稳定性和可靠性至关重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设置步骤:
1)设定参考点(Ref Position);
机器人在参考点时UO[7]为ON 2)设定位置寄存器(PR)中的HOME位置; 方便在程序中调用参考点
2015-5-18
5
2015-5-18
6
2015-5-18
7
2015-5-18 13
2015-5-18
14
• 专用外部信号开启 Menu-0 next-6 system-F1 type-config-Enable UI signals • 再开外部信号开启
Menu-0 next-6 system-F1 type-config-START for CONTINUE only
2015-5-18
8
2015-5-189ຫໍສະໝຸດ 2015-5-1810
2015-5-18
11
设定位置寄存器(PR)中的HOME位置
Ref Position点记录后不要移动机器人 依次按键:DATA—F1—PR进入位置寄存器,选择第一项按 SHIFT+F5记录
2015-5-18 12
三,
暂停程序: 暂停信号(HOLD)中断时暂停正在运行的程序 紧急停止程序: 紧急停机信号(IMSTP)中断时紧急停机 允许移动机器人: 使能信号(EnaBle)为ON时允许移动
ACTIV
2)依次分配好信号值(RANGE)、机架(RACK)、插槽 (SLOT)、开始点(START)
3)切换到UO继续分配完毕,重启机器人。 重启后状态(STAT)为ACTIV则信号正常
2015-5-18
信号一览
(允许机器人移动时为ON)
2015-5-18
2015-5-18
4
二,设置HOME点,让PLC知道机器人准备好
外部启动机器人
-FANUC
重庆蓝姆电气部 By-HaiPeng
2015-5-18
一,配置UOP信号
1)依次按键操作:MENU—SETUP—I/O—UOP,F2切换到 CONFIG状态(按F3IN/OUT切换输入输出信号到UI)
#
1
RANGE
UI [ 1- 18]
RACK
82
SLOT
1
START
1
STAT
27
2015-5-18
15
四,
2015-5-18
16
2015-5-18
17
2015-5-18
18
2015-5-18
19
2015-5-18
20
2015-5-18
21
2015-5-18
22
2015-5-18
23
2015-5-18
24
2015-5-18
25
2015-5-18
26
2015-5-18