中国计量大学821自动控制原理2-2017年考研初试真题
热工基础 中国计量大学 2017年硕士研究生考研真题

工程热力学部分(共75分)一、选择题(每题2分,共16分):1、气体常数R()gA.与气体种类有关,与状态无关B.与状态有关,与气体种类无关C.与气体种类和状态均有关D.与气体种类和状态均无关2、关于湿空气,下列说法正确的有()A.绝对湿度为100%的湿空气为饱和空气B.相对湿度为100%的湿空气为饱和空气C.含湿量为100%的湿空气为饱和空气D.绝热饱和湿度总是低于露点温度3、气体在某个过程中吸收了64kJ热量,同时热力学能增加了94kJ,该过程为()A.膨胀过程B.压缩过程C.等容过程D.等温过程4、未饱和湿空气中的水蒸气处于()A.未饱和状态B.过热状态C.湿蒸汽状态D.饱和状态5、工程上蒸汽动力装置未采用卡诺循环的原因为()A.卡诺循环的工质只能是理想气体B.循环放热量太大,吸热量太小C.不能实现等温吸热和等温放热D.湿饱和蒸汽区温限太小且压缩两相介质困难6、实际气体的压缩因子()A.大于1 B.小于1C.等于1 D.可大于、小于、等于17、理想气体绝热节流后,其状态参数变化为:()A.熵增大,焓不变,温度不变B.熵增大,焓不变,温度不定C.压力降低,焓不变,熵不变,D.压力降低,熵增大,焓增大8、热力学第二定律的表述为:()A.第一类永动机不可能制造成功B.不可能把热从低温物体传到高温物体C.不可能从单一热源吸热,使之完全变为有用功D.以上答案均不对二、填空题(每空2分,共22分)1、在定熵流动中若喷管进口气体流速低于当地音速,如果使气体增速,则需要选择()喷管或者()喷管;2、简单热力系统的热力学能包括()和();3、实现可逆过程的条件是()和();4、冬天用暖气取暖,如果不采用其它措施,则室内温度(),相对湿度();5、定容过程的多变指数为();定压过程的多变指数为();6、某空调输入功率为1.5kw,向环境介质输出热量5.1kw,则空调的制冷系数为()。
三、简答题(每小题5分,共15分)1、一个热力系统熵变化可分为熵流和熵产,分别说明他们的含义并指出其正负号。
中国计量大学821自动控制原理2 2016-2019年考研专业课真题试卷
2019年中国计量大学考研专业课初试考试真题试卷
八、(20 分) 已知一个闭环控制系统如图 5 所示,已知 T = 0.5s 。试求:
(1)判别系统的稳定性(5 分) (2)求 r(t) = t 时系统的稳态误差(5 分); (3)求单位阶跃响应序列 c(k ) ,并画出响应曲线(10 分)。
【完】
X 2 (s) X3(s)
G1(s) X1(s) G2(s) X 2(s)
H2
(s)C(s)
C(s) G4(s) X 2(s) G3(s) X3(s)
三、(20 分)
反馈系统中,前向传递函数为 G(s) k(s 40) ,反馈回路传递函数为 H (s) 1
2019年中国计量大学考研专业课初试考试真题试卷
中国计量大学 2019 年硕士研究生招生考试试题
考试科目代码:821
考试科目名称:自动控制原理 2
所有答案必须写在报考点提供的答题纸上,做在试卷 或草稿纸上无效。
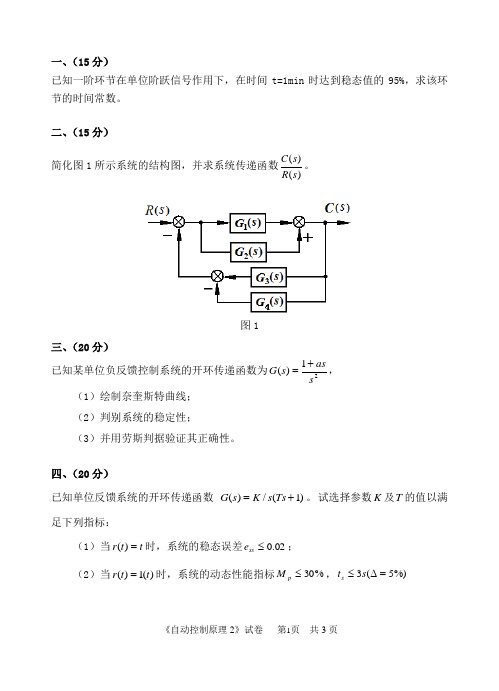
一、(15 分) 求图 1 所示无源网络的传递函数。
二、(15 分)
一个单位负反馈系统的开环传递函数为
G(s)
=
(s
+
2)(s
+
K
4)(s2
+
6s
+
25)
试求闭环系统产生持续等幅振荡的 K 值和相应的振荡频率。
《自动控制原理 2》试卷 第 1 页 共 4 页
2019年中国计量大学考研专业课初试考试真题试卷
三、(20 分)
假设温度计可用传递函数 1 描述其特征,现在用温度计测量盛在容器内的水温,发
Ts +1
《自动控制原理 2》试卷 第 2 页 共 3 页
中国计量大学822传感器技术2-2017年考研初试真题

A.纯金属阴极材料
B.阳极材料
C.阴极材料
D.玻璃壳材料
《传感器技术 2》试题 第 3 页 共 5 页
7. ( )传感器工作时不需要供电电源。
A.电感式 B.磁电式 C.电容式 D.电阻式
8. 压电式传感器在测量时加预紧力是为了( )。
A.改善非线性 B.提高刚度 C.消除间隙 D.以上都对
9. 引用误差是一种( )。
五、(10 分)对于压电式传感器,回答下列问题: 1)什么是压电式传感器的电压灵敏度和电荷灵敏度?二者有何关系?(5 分) 2)已知某压电式传感器测量最低信号频率为 1 Hz,采用电压放大器输入 回路,今欲使其在 1 Hz 信号频率时的相对幅频特性大于 0.95,则电压放 大器测量回路的时间常数 R(Ca Cc Ci ) 应为多大? (5 分)
的原理,将等节距的周期变化的电信号(正弦波或矩形波)用
的方法记录在
或
上而制成的。装有磁栅式传感器的
仪器或装置工作时,
相对于
有一定的
或
。磁栅式传感器可用于测量
或
,其信
号处理方式分为
和
两种。
4. 电荷耦合器件简称为
ห้องสมุดไป่ตู้
,它将
和
集成为一体,构成具有
功能的图像传感器。
三、选择题(每题 2 分,共 2x10=20 分)
《传感器技术 2》试题 第 5 页 共 5 页
《传感器技术 2》试题 第 1 页 共 5 页
一、物理概念或名词解释(每题 3 分,共 3x10=30 分) 1. 感应同步器 2. 重复性 3. 逆压电效应 4. 传感器的动态特性 5. 谐振式传感器 6. 光电池 7. 霍尔元件的不等位电动势 8. 中间导体定律 9. 光纤的数值孔径 10. 无线传感器网络
821自动控制原理 中国计量大学 2017年硕士研究生考研真题
已知一阶环节在单位阶跃信号作用下,在时间t=1min 时达到稳态值的95%,求该环节的时间常数。
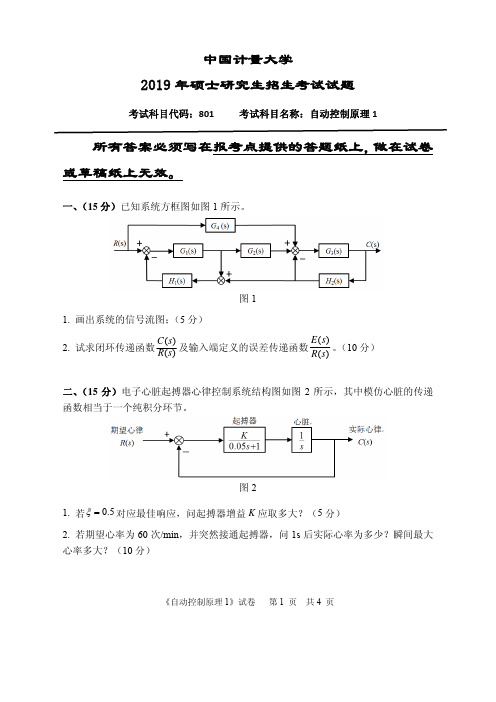
二、(15分)简化图1所示系统的结构图,并求系统传递函数)()(s R s C 。
图1三、(20分)已知某单位负反馈控制系统的开环传递函数为21)(sass G +=, (1)绘制奈奎斯特曲线; (2)判别系统的稳定性;(3)并用劳斯判据验证其正确性。
四、(20分)已知单位反馈系统的开环传递函数 )1(/)(+=Ts s K s G 。
试选择参数K 及T 的值以满足下列指标:(1)当t t r =)(时,系统的稳态误差02.0≤ss e ;(2)当)(1)(t t r =时,系统的动态性能指标%30≤p M ,%)5(3=∆≤s t s设一位置随动系统如图2所示。
图2 位置随动系统试求:(1)绘制以τ为参变量的根轨迹;ζ时的闭环传递函数(2)求系统的阻尼比5.0=六、(20分)已知最小相位系统)L如图3所示,试确定(ω图3 最小相位系统Bode图 (1) 开环传递函数)G;(s(2) 由γ确定系统的稳定性;(3) 将)L右移10倍频,讨论对系统的影响。
(ω七、(20分)在图4所示系统中,当10=k ,1.0=T 时,截止频率5=c ω。
若要求c ω不变,如何选择k ,T 值,才能使系统相位裕度提高45︒。
图4 系统结构图八、(20分)图5所示的采样控制系统,要求在()r t t =作用下的稳态误差0.25ss e T =,试确定系统稳定时T 的取值范围。
图5 采样控制系统【完】。
中国计量大学810自动控制原理一全套考研真题(2007-2020)
【完】
《自动控制原理 1》试卷 第 4 页 共 4 页
中国计量学院 2007 年攻读硕士学位研究生入学试题
考试科目名称: 考试科目代码: 考 生 姓 名: 考 生 编 号:
自动控制原理 410
考生须知:
1、所有答案必须写在答题纸上,做在试卷 或草稿纸上无效。
2、答案必须写清题号,字迹要清楚,保持 卷面清洁。
五、(14 分)单位负反馈系统的开环传递函数为:
G(s) = 10(s +1) s(10s +1)(0.1s +1)
1.试画出开环对数幅频渐进曲线;(7 分) 2. 计算相稳定裕度。(7 分)
六、(20 分)已知离散系统的结构如下图示:
R(s)
− T = 1s
1 − e−Ts s
k
CI(s)
s(s + 1)
《自动控制原理 1》试卷 第 1 页 共 4 页
三、(15 分)系统结构图如图 3 所示,[e(t) = r(t) − b(t)] 。
图3 1. 已知 G1(s)的单位阶跃响应为1− e−2t ,试求 G1(s);(5 分) 2. 利用求出的 G1(s),当 r(t)=10·1(t)时,试求:①系统的稳态输出;②系统的超调量、 调节时间和稳态误差。(10 分)
2. 当 K=52,利用奈奎斯特稳定判据判断其闭环系统的稳定性。(5 分)
六、(15 分)已知最小相位开环系统的渐近对数幅频特性如图 5 所示,试求: 1. 系统的开环传递函数;(4 分) 2. 截止频率ωc 和相角裕量 γ ;(8 分) 3. 若使截止频率ωc = 10rad / s ,其放大倍数应取多少?(3 分)
(0.05 误差带)。
2. 求以下系统在单位斜坡输入信号作用下的稳态误差。
中国计量大学2021年硕士研究生考试试题《自动控制原理1》考试代码801
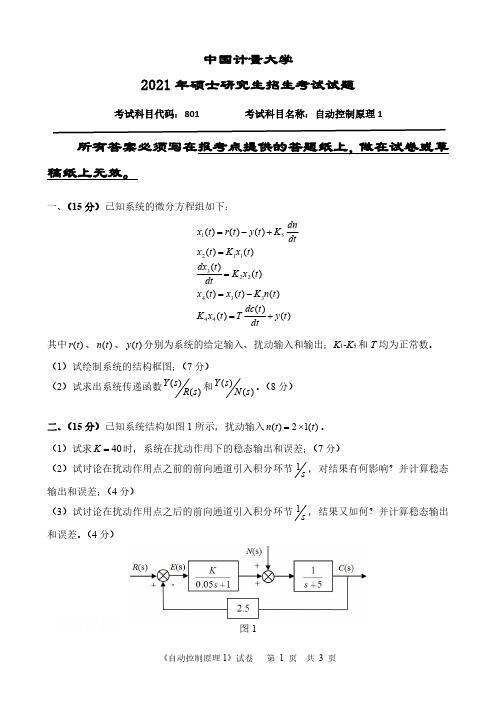
中国计量大学2021年硕士研究生招生考试试题考试科目代码:801考试科目名称:自动控制原理1所有答案必须写在报考点提供的答题纸上,做在试卷或草稿纸上无效。
一、(15分)已知系统的微分方程组如下:1521132243344()()()()()()()()()()()()()dn x t r t y t K dt x t K x t dx t K x t dt x t x t K n t dc t K x t T y t dt =-+===-=+其中()r t 、()n t 、()y t 分别为系统的给定输入、扰动输入和输出;K 1-K 5和T 均为正常数。
(1)试绘制系统的结构框图;(7分)(2)试求出系统传递函数()()Y s R s 和()()Y s N s 。
(8分)二、(15分)已知系统结构如图1所示,扰动输入()21()n t t =⨯。
(1)试求40K =时,系统在扰动作用下的稳态输出和误差;(7分)(2)试讨论在扰动作用点之前的前向通道引入积分环节1s,对结果有何影响?并计算稳态输出和误差;(4分)(3)试讨论在扰动作用点之后的前向通道引入积分环节1s,结果又如何?并计算稳态输出和误差。
(4分)图1越努力,越幸运!知识管理三、(15分)已知控制系统结构如图2所示。
11()G s K =,221()(1)T G s s T s =+,22()1r as bs G s T s+=+,其中K 1、T 1、T 2均为正值。
(1)试讨论a 和b 取值对系统稳定性的影响关系;(5分)(2)当输入为21()2r t t =时,要求系统稳态误差为零,试确定a 和b 值。
(10分)图2四、(15分)已知系统结构图3所示。
(1)绘制系统的根轨迹图;(6分)(2)试确定系统具有欠阻尼状态的开环增益*K 的取值范围;(3分)(3)试计算阻尼比为0.707时的系统的开环增益*K 值;(3分)(4)试计算开环增益6*=K 时的系统速度误差ss e 。
中国计量学院自动控制原理总复习.

一、系统稳定的充分与必要条件
二、劳斯稳定判据
第六节 控制系统的稳态误差分析
设 D(s)=0 控制系统的典型结构 根据终值定理得: D(s) C(s) R(s) E(s) essr=lim er(t)=lim s· Er+ (s)
t→∞ _
稳态误差 及误差系数
G1(s) s→0
G2(s)
R(s) =lim s· H(s) s →0 1+G(s)H(s) 系统误差: R(s)作用时 e(t)=r(t)-b(t) 期望值与实际值的差值。 系统给定信号作用下的稳态误差不仅与 R(s) R(s) Er(s)= = 系统的输入有关,还与系统的结构有关。 稳态误差: 1+G 1+G(s)H(s) ess=lim e(t) 进入稳态后的误差值。 1(s)G2(s)H(s)
例2 已 知 某 控 制 系 统 方 框 如 图图 所 示 ,要 求 该 系 统 的 单 位 阶跃响应 c(t)具 有 超 调 量 p 16.3%和 峰值时间 t p 1 秒, 试 确 定 前 置 放 大 器 的益 增 K及 内 反 馈 系 数 之 值.
R(s)
K
10 s ( s 1)
n
第三节 二阶系统性能分析
5. 稳态误差ess
根据稳态误差的定义和终值定理有
ess= lim e(t) = lim SE(s)
t→∞
s→0
欠阻尼二阶系统的稳态误差: 2 ωn 1 G(s)H(s)= R(s)= ζ ωn ) S(S+2 S R(s) ess= lim S =0 s→0 1+G(s)H(s)
Uc(s)
第四节 动态结构图
动态结构图的等效变换与化简
系统的动态结构图直观地反映了系统 内部各变量之间的动态关系。将复杂的动 态结构图进行化简可求出传递函数。
中国计量大学2020年《801自动控制原理1》考研专业课真题试卷
《自动控制原理 1》试卷 第 1 页 共 4 页
二、(15 分)已知控制系统结构图如图 2 所示:
(1)试分析说明内反馈 Kfs 的存在对系统稳定性的影响;(9 分) (2)计算静态加速度误差系数,分析内反馈 Kfs 的存在对系统稳态误差的影响。(6 分) 三、(15 分)有一位置随动系统,结构如图 3 所示。 K = 40 ,τ = 0.1。
中国计量大学 2020 年硕士研究生招生考试试题
考试科目代码:801
考试科目名称:自动控制原理 1
所有答案必须写在报考点提供的答题纸上,答在试卷 或草稿纸上无效。
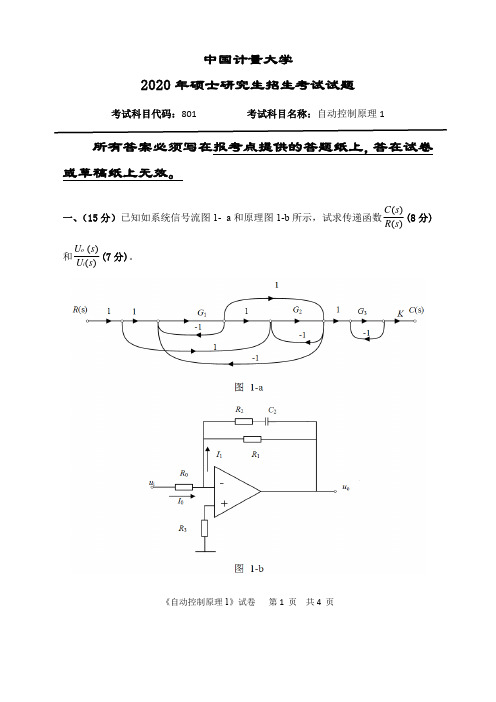
一、(15 分)已知如系统信号流图 1-
a
和原理图
1-b
所示,试求传递函数
C(s) R(s)
(8 分)
和 Uo (s) (7 分)。 Ui(s)
(1)求系统的开环和闭环极点;(5 分) (2)当输入量 R(s) 为单位阶跃函数时,求系统的自然振荡角频率 ωn ,阻尼比 ξ 和系 统的动态性能指标 tr , ts ,σ %。(10 分) 四、(15 分)已知某单位负反馈系统的开环传递函数为: G(s) = K *(s + 9)
s(s +10)2 (1)绘制当 K * 从零变化到正无穷大时,闭环系统的根轨迹图;(7 分) (2)分析该系统稳定时 K * 的取值范围;(2 分) (3)已知系统有一个闭环极点 p1 = −8.8 ,利用主导极点法近似计算此时系统单位阶跃 响应的超调量和调节时间。(6 分)
(3)求系统的传递函数Y (s) / U (s) 。(6 分)
九、(20 分)某线性定常系统的状态空间表达式如下:
⎡−1 0 2⎤ ⎡2⎤
x&
=
⎢ ⎢
中国计量大学自动控制原理2012--2014年考研真题

0.2S + 1 B(s)
Kh
四、(15 分)
已知一单位反馈系统的开环传递函数为:G(s)
=
K0 (s + 4) s(s + 2)
。
1. 试证明该系统根轨迹的复数部分为一圆,并画出根轨迹。(8 分)
2. 分析K0从 0→∞变化时系统阻尼比的变化情况;(4 分)
3. 分析K0从 0→∞变化时系统超调量的变化情况。(3 分)
二、(15 分) 已知系统的单位脉冲响应为 g(t) = 10e−0.2t + 5e−0.5t ,
(1) 求系统的传递函数;(10 分) (2) 确定系统的单位阶跃响应达到稳态值的 95%所需的时间。(5 分)
三、(15 分)
控制系统如下图所示。若要求系统的超调量 M p = 0.25 ,峰值时间 tp = 2s 。
db
0 20
0
0.02
-20
-40
20
200
0
ω
-20
七、(20 分) 已知采样系统结构如图所示,其中采样周期 T = 0.1 s。
R(S)
-T
1-e −TS S
k
C(S)
2S +1
(1)求开环脉冲传递函数和闭环脉冲传递函数;(15 分) (2)确定闭环系统稳定的 k 值范围。(5 分)
《自动控制原理》试卷 第 2 页 共 3 页
一、(15 分) 控制系统如下图所示:
R(s)
- G1(s)
G2(s)
-
H4(s)
-
G3(s)
H2(s)
C(s)
G4(s)
-
G5(s)
G6(s)
H3(s)
H1(s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 5 采样控制系统
【完】
《自动控制原理 2》试卷 第 4 页 共 3 页
《自动控制原理 2》试卷 第 2 页 2 所示。
图 2 位置随动系统 试求:(1)绘制以 为参变量的根轨迹;
(2)求系统的阻尼比 0.5 时的闭环传递函数 六、(20 分) 已知最小相位系统 L() 如图 3 所示,试确定
图 3 最小相位系统 Bode 图 (1) 开环传递函数 G(s) ; (2) 由 确定系统的稳定性; (3) 将 L() 右移 10 倍频,讨论对系统的影响。
《自动控制原理 2》试卷 第 1 页 共 3 页
一、(15 分) 已知一阶环节在单位阶跃信号作用下,在时间 t=1min 时达到稳态值的 95%,求该环 节的时间常数。 二、(15 分) 简化图 1 所示系统的结构图,并求系统传递函数 C(s) 。
R(s)
图1 三、(20 分) 已知某单位负反馈控制系统的开环传递函数为 G(s) 1 as ,
s2 (1)绘制奈奎斯特曲线; (2)判别系统的稳定性; (3)并用劳斯判据验证其正确性。 四、(20 分) 已知单位反馈系统的开环传递函数 G(s) K / s(Ts 1) 。 试选择参数 K 及T 的值以满 足下列指标: (1)当 r(t) t 时,系统的稳态误差 ess 0.02 ; (2)当 r(t) 1(t) 时,系统的动态性能指标 M p 30% , ts 3s( 5%)
中国计量大学 2017 年攻读硕士学位研究生入学试题
考试科目名称: 自动控制原理 2 考试科目代码: 821 考 生 姓 名: 考 生 编 号:
考生须知:
1、所有答案必须写在报考点提供的答题纸 上,做在试卷或草稿纸上无效。
2、答案必须写清题号,字迹要清楚,保持 卷面清洁。
3、试卷、草稿纸必须随答题纸一起交回。
《自动控制原理 2》试卷 第 3 页 共 3 页
七、(20 分) 在图 4 所示系统中,当 k 10 ,T 0.1时,截止频率c 5 。若要求c 不变,如何 选择 k ,T 值,才能使系统相位裕度提高 45。
图 4 系统结构图 八、(20 分) 图 5 所示的采样控制系统,要求在 r(t) t 作用下的稳态误差 ess 0.25T ,试确定系统 稳定时T 的取值范围。