台达伺服故障查询
台达驱动器故障代码查询表

EF1
当外部多功能输入端子(MI1-MI6)设定紧急停止时,交流电机驱动器停止输出
清除故障来源后按:RESET“即可
cF1
内部存贮器IC资料写入异常
送场维修
cF2
内部存贮器ic资料读出异常
按下RESET键将参数重置为出厂设定
若方法无效,测送场维修
cF3.3
交流电机驱动器侦测线路异常
检查电机接线是否正确
重试
cEF
外部计数器到达设定值时,发生外部异常错误
检查外部计数器出发信号
检查参数Pr03-39,03-11
PHL
欠相保护
检查是否为三相输入电源
RnLErPGErr
模拟信号错误PG会授信号错误
检查参数设定和AVI/AC的线路
检查系统反应时间回授信号侦测时间之间的所有可能发生的错误
PG卡接线是否正确
自动加减速模式失败
交流电机驱动器是否匹配或恰当
负载回升惯量过大
负载变化过于急骤
cE-
通信失常
检查通讯信号有无反接(RJ11)检查通讯 Nhomakorabea式是否正确
CcodEPcodE
软件保护启动
显示CcodE送场维修
显示PcodE为密码锁定
Lc
低电流
检查负载电流
检查参数pr06-12,06-15设定
RUE
电机参数自动侦测错误
cF3.8
交流电机驱动器侦测线路异常
温度感测器异常,送场维修
GFF
接地保护线路动作
当交流电机驱动器侦测到输出端接地切接地电流高于交流电机驱动器额定电流的50(%)以上
注意:此保护系统针对交流电机驱动器而非人体
台达伺服报警查询

台达伺服报警查询 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT台达伺服驱动器异警处理RLE01:过电流:主回路电流值超越电机瞬间最大电流值倍时动作1.驱动器输出短路:检查电机与驱动器接线状态或导线本体是否短路,排除短路状态,并防止金属导体外露2.电机接线异常:检查电机连接至驱动器的接线顺序,根据说明书的配线顺序重新配线3.IGBT异常:散热片温度异常,送回经销商或原厂检修4.控制参数设定异常:设定值是否远大于出厂预设值,回复至原出厂预设值,再逐量修正5.控制命令设定异常:检查控制输入命令是否变动过于剧烈,修正输入命令变动率或开启滤波功能RLE02:过电压:主回路电压值高于规格值时动作1.主回路输入电压高于额定容许电压值:用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1),使用正确电压源或串接稳压器2.电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器3.驱动器硬件故障:当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误,送回经销商或原厂检修RLE03:低电压:主回路电压值低于规格电压时动作1.主回路输入电压低于额定容许电压值:检查主回路输入电压接线是否正常,重新确认电压接线2.主回路无输入电压源:用电压计测定是否主回路电压正常,重新确认电源开关3.电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器RLE04:RLE04:Z脉冲所对应磁场角度异常1.编码器损坏:编码器异常,更换电机2.编码器松脱:检视编码器接头,重新安装RLE05:回生错误:回生控制作动异常时动作1.回生电阻未接或过小:确认回生电阻的连接状况,重新连接回生电阻或计算回生电阻值2..回生用切换晶体管失效:检查回生用切换晶体管是否短路,送回经销商或原厂检修3.参数设定错误:确认回生电阻参数(P1-52)设定值与回生电阻容量参数(P1-53)设定,重新正确设定RLE06:过负载:电机及驱动器过负载时动作1.超过驱动器额定负载连续使用:可由驱动器状态显示P0-02设定为11后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载2.控制系统参数设定不当:机械系统是否摆振、加减速设定常数过快,调整控制回路增益值、加减速设定时间减慢3.电机、编码器接线错误:检查U、V、W及编码器接线是否准确4.电机的编码器不良:送回经销商或原厂检修RLE07:过速度:电机控制速度超过正常速度过大时动作1.速度输入命令变动过剧:用信号检测计检测输入的模拟电压信号是否异常,调整输入变信号动率或开启滤波功能2.过速度判定参数设定不当:检查过速度设定参数P2-34(过速度警告条件)是否太小,检查过速度设定参数P2-34(过速度警告条件)是否太小RLE08:异常脉冲控制命令:脉冲命令的输入频率超过硬件界面容许值时动作1.脉冲命令频率高于额定输入频率:用脉冲频率检测计检测输入频率是否超过额定输入频率,正确设定输入脉冲频率RLE09:位置控制误差过大:位置控制误差量大于设定容许值时动作1.最大位置误差参数设定过小:确认最大位置误差参数P2-35(位置控制误差过大警告条件)设定值,加大P2-35(位置控制误差过大警告条件)设定值2.增益值设定过小:确认设定值是否适当,正确调整增益值3.扭矩限制过低:确认扭矩限制值,正确调整扭矩限制值4.外部负载过大:检查外部负载,减低外部负载或重新评估电机容量。
台达伺服常见故障分析与解决

1.增量型伺服初次上电报警解决步骤:报警代码涉及参数设定值AL013 P2-15 0AL014 P2-16 0AL015 P2-17 0更改完参数,需重新上电。
2.绝对值伺服初次上电报警解决步骤:除了以上问题,还有绝对值伺服本身的设定参数。
绝对值伺服上电会报AL060绝对值伺服设定步骤:2-08 先设 30 再设 28(断电上电)2-69 12-08 2712-71 10-49 1看0-510-523.测试过程中,出现报警及解决方法:报警代码涉及参数(故障原因)设定值(或修改方法)AL006 启动短时间报警电机堵转, U V W 接错AL011 位置检出器异常查看编码器线,或排除干扰AL018 若是伴随 AL011 出现按 AL011 处理AL009 P2-35 上限值检查负载或者电子齿轮比设定AL018 确认以下条件是否产生:正确设定参数 P1-76 与P1-76< 电机转速与P1-46 :1 46 4 19.8 10 P1-76> 电机转速与61 46 4 19.8 10606电机转速PAL024 AL026编码器初始磁场错误电机接地端是否正常接(磁场位置 UVW 错误地2.编码器讯号线,是否有与电源或大电流的线路分开,避免干扰源的产生3.位置检出器的线材是否使用隔离线1. 电机接地端是否正常 1.请将 UVW 接头的接接地地端(绿2.编码器讯号线,是否有色 )与驱动器的散热部分与电源或大电流的线路分开,避免干扰源的产生3. 位置检出器的线材连接2. 请检查编码器讯号线,是否有与电源或大电流的线路确实的分隔开3. 请使用含隔离网的线材4.当运行过程中电机出现明显的抖动或震动:需手动调增益看看效果手动模式调增益:当P2-32 设定为 0 时,速度回路的比例增益( P2-04), 积分增益( P2-06), 和前馈增益( P2-07), 可自由设定。
比例增益:增加增益会提高速度回路响应带宽积分增益:增加增益会提高速度回路低频刚度,并降低稳态误差。
台达伺服报警查询

台达伺服启动器同警处理之阳早格格创做RLE01:过电流:主回路电流值超出电机瞬间最大电流值1.5倍时动做1.启动器输出短路:查看电机与启动器交线状态或者导线本质是可短路,排除短路状态,并预防金属导体中露 2. 电机交线非常十分:查看电机连交至启动器的交线程序,根据证明书籍的配线程序沉新配线 3. IGBT 非常十分:集热片温度非常十分,支回经销商或者本厂检建 4. 统制参数设定非常十分:设定值是可近大于出厂预设值,恢复至本出厂预设值,再逐量建正 5. 统制下令设定非常十分:查看统制输进下令是可变动过于剧烈,建正输进下令变动率或者开开滤波功能RLE02:过电压:主回路电压值下于规格值时动做1.主回路输进电压下于额定容许电压值:用电压计测定主回路输进电压是可正在额定容许电压值以内(参照11-1),使用精确电压源或者串交稳压器 2. 电源输进过得(非精确电源系统):用电压计测定电源系统是可与规格定义相符,使用精确电压源或者串交变压器 3. 启动器硬件障碍:当电压计测定主回路输进电压正在额定容许电压值以内仍旧爆收此过得,支回经销商或者本厂检建RLE03:矮电压:主回路电压值矮于规格电压时动做1.主回路输进电压矮于额定容许电压值:查看主回路输进电压交线是可仄常,沉新确认电压交线 2. 主回路无输进电压源:用电压计测定是可主回路电压仄常,沉新确认电源开闭 3. 电源输进过得(非精确电源系统):用电压计测定电源系统是可与规格定义相符,使用精确电压源或者串交变压器RLE04:RLE04:Z 脉冲所对于应磁场角度非常十分1.编码器益坏:编码器非常十分,调换电机 2. 编码器紧脱:检视编码器交头,沉新拆置RLE05:回死过得:回死统创制动非常十分时动做1.回死电阻已交或者过小:确认回死电阻的连交情景,沉新连交回死电阻或者估计回死电阻值 2. .回死用切换晶体管做废:查看回死用切换晶体管是可短路,支回经销商或者本厂检建 3. 参数设定过得:确认回死电阻参数(P1-52)设定值与回死电阻容量参数(P1-53)设定,沉新精确设定RLE06:过背载:电机及启动器过背载时动做1.超出启动器额定背载连绝使用:可由启动器状态隐现P0-02设定为11后,监视仄衡转矩[%]是可持绝背来超出100%以上,普及电机容量或者落矮背载 2. 统制系统参数设定没有当:板滞系统是可晃振、加减速设定常数过快,安排统制回路删益值、加减速设定时间减缓 3. 电机、编码器交线过得:查看 U、V、W 及编码器交线是可准确 4. 电机的编码器没有良:支回经销商或者本厂检建RLE07:过速度:电机统制速度超出仄常速度过大时动做1.速度输进下令变动过剧:用旗号检测计检测输进的模拟电压旗号是可非常十分,安排输进变旗号动率或者开开滤波功能 2. 过速度判决参数设定没有当:查看过速度设定参数P2-34(过速度告诫条件)是可太小,查看过速度设定参数P2-34(过速度告诫条件)是可太小RLE08:非常十分脉冲统制下令:脉冲下令的输进频次超出硬件界里容许值时动做1.脉冲下令频次下于额定输进频次:用脉冲频次检测计检测输进频次是可超出额定输进频次,精确设定输进脉冲频次RLE09:位子统制缺面过大:位子统制缺面量大于设定容许值时动做1.最大位子缺面参数设定过小:确认最大位子缺面参数P2-35(位子统制缺面过大告诫条件)设定值,加大 P2-35 (位子统制缺面过大告诫条件)设定值 2. 删益值设定过小:确认设定值是可适合,精确安排删益值 3. 扭矩节制过矮:确认扭矩节制值,精确安排扭矩节制值 4. 中部背载过大:查看中部背载,减矮中部背载或者沉新评估电机容量.调换摇床电机.RLE10:芯片真止超时:芯片非常十分时动做1.芯片动做非常十分:电源复位检测,复位仍非常十分时,支回经销商或者本厂检建RLE11:编码器非常十分:编码器爆收脉冲旗号非常十分时动做1.编码器交线过得:确认交线是可按照证明书籍内的提议线路是可准确 2. 编码器紧脱:检视启动器上CN2与编码器交头,沉新拆置 3. 编码器交线没有良:查看启动器上的 CN2 与伺服电机编码器二端交线是可紧脱,沉新连交交线 4. 编码器益坏:电机非常十分,调换电机RLE12:矫正非常十分:真止电气矫正时矫正值超出容许值时动做1.模拟输进交面无精确归整:量测模拟输进交面的电压准位是可共交天电位,模拟输进交面精确交天 2. 检测元件益坏:电源复位检测,复位仍非常十分时,支回经销商或者本厂检建RLE13:慢迫停止:慢迫按钮按下时动做1.慢迫停止开闭按下:确认开闭位子,开开慢迫停止开闭RLE14:顺背运止极限非常十分:顺背极限开闭被按下时动做1.顺背极限开闭按下:确认开闭位子,开开顺背极限开闭2. 伺服系统宁静度没有敷:确认设定的统制参数及背载惯量,沉新建正参数或者是沉新评估电机容量RLE15:正背运止极限非常十分:正背极限开闭被按下时动做1.正背极限开闭按下:确认开闭位子,开开顺背极限开闭2. 伺服系统宁静度没有敷:确认设定的统制参数及背载惯量,沉新建正参数或者是沉新评估电机容量RLE16:IGBT温度非常十分:IGBT温度过下时动做1.超出启动器额定背载连绝使用:查看是可背载过大或者电机电流过下,普及电机容量或者落矮背载2.查看启动器输出交线,精确交线RLE17:保存器非常十分:保存器(EE-PROM)存与非常十分时动做1.保存器数据存与非常十分:参数复位或者电源复位,复位仍非常十分时,支回经销商或者本厂检建2. 使用通讯万古间写进,制成保存器数据存与非常十分:使用万古间通讯写进时,是可将P2-30设为5,设定此值可预防连绝写进保存器,而落矮保存器寿命.然而各参数的设定值于断电后没有脆持与储藏,复位仍非常十分时,支回经销商或者本厂检建RLE18:芯片通讯非常十分:芯片通讯非常十分时动做1.统制电源非常十分:检测及复位统制电源,复位仍非常十分时,支回经销商或者本厂检建RLE19:串止通讯非常十分:RS-232/485通讯非常十分时动做1.通讯参数设定没有当:检视通讯参数设定值,精确设定参数值2. 通讯天面没有精确:查看通讯天面,精确设定通讯天面3. 通讯数值没有精确:查看存与数值,精确设定数值RLE20:串止通讯超时:RS-232/485通讯非常十分时动做1.超时参数设定没有当:查看超时参数的设定,精确设定数值2. 万古间已交支通讯下令:查看通讯线是可紧脱或者断线RLE21:下令写进非常十分:统制下令下达非常十分时动做1.统制电源非常十分:检测及复位统制电源,复位仍非常十分时,支回经销商或者本厂检建RLE22:主回路电源缺相:主回路电源缺仅单相输进1.主回路电源非常十分:查看 RST 电源线是可紧脱或者仅单相输进,真真交进三相电源,仍非常十分时,支回经销商或者本厂检建RLE23:预先过背载告诫:电机及启动器根据参数 P1-56 过背载输出准位设定的百分比,预先爆收过背载告诫动做1.预先过背载告诫:决定是可已通过载使用、电机及启动器根据参数 P1-56过背载输出准位设定的百分比是可设定过小,请参照 ALE06 过背荷的同警处置、请将参数 P1-56 的设定值设大,或者是将值设定超出 100与消此预先过背载告诫功能RLE97:里里下令真止超时:里里下令真止爆收问题1.里里下令真止爆收问题:检测及复位统制电源,复位仍非常十分时,支回经销商或者本厂检建RLE98:芯片通讯过得:硬件障碍引导芯片通讯过得1.硬件障碍引导芯片通讯过得:检测及复位统制电源,复位仍非常十分时,支回经销商或者本厂检建RLE99:芯片通讯过得:硬件障碍引导芯片通讯过得1.硬件障碍引导芯片通讯过得:检测及复位统制电源,复位仍非常十分时,支回经销商或者本厂检建。
台达伺服报警查询

台达伺服驱动器异警处理RLE01:过电流:主回路电流值超越电机瞬间最大电流值1.5 倍时动作1.驱动器输出短路:检查电机与驱动器接线状态或导线本体是否短路,排除短路状态,并防止金属导体外露2. 电机接线异常:检查电机连接至驱动器的接线顺序,根据说明书的配线顺序重新配线3. IGBT 异常:散热片温度异常,送回经销商或原厂检修 4. 控制参数设定异常:设定值是否远大于出厂预设值,回复至原出厂预设值,再逐量修正 5. 控制命令设定异常:检查控制输入命令是否变动过于剧烈,修正输入命令变动率或开启滤波功能RLE02过电压:主回路电压值高于规格值时动作1.主回路输入电压高于额定容许电压值:用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1 ),使用正确电压源或串接稳压器 2. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器 3. 驱动器硬件故障:当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误,送回经销商或原厂检修RLE03低电压:主回路电压值低于规格电压时动作1.主回路输入电压低于额定容许电压值:检查主回路输入电压接线是否正常,重新确认电压接线 2. 主回路无输入电压源:用电压计测定是否主回路电压正常,重新确认电源开关3. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器RLE04 RLE04 Z脉冲所对应磁场角度异常1.编码器损坏:编码器异常,更换电机 2. 编码器松脱:检视编码器接头,重新安装RLE05回生错误:回生控制作动异常时动作1.回生电阻未接或过小:确认回生电阻的连接状况,重新连接回生电阻或计算回生电阻值2. . 回生用切换晶体管失效:检查回生用切换晶体管是否短路,送回经销商或原厂检修3. 参数设定错误:确认回生电阻参数(P1-52 )设定值与回生电阻容量参数(P1-53 )设定,重新正确设定RLE06过负载:电机及驱动器过负载时动作1.超过驱动器额定负载连续使用:可由驱动器状态显示P0-02 设定为11 后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载2. 控制系统参数设定不当:机械系统是否摆振、加减速设定常数过快,调整控制回路增益值、加减速设定时间减慢3.电机、编码器接线错误:检查U、V、W及编码器接线是否准确 4. 电机的编码器不良:送回经销商或原厂检修RLE07过速度:电机控制速度超过正常速度过大时动作1.速度输入命令变动过剧:用信号检测计检测输入的模拟电压信号是否异常,调整输入变信号动率或开启滤波功能 2. 过速度判定参数设定不当:检查过速度设定参数P2-34 (过速度警告条件)是否太小,检查过速度设定参数P2-34 (过速度警告条件)是否太小RLE08异常脉冲控制命令:脉冲命令的输入频率超过硬件界面容许值时动作1.脉冲命令频率高于额定输入频率:用脉冲频率检测计检测输入频率是否超过额定输入频率,正确设定输入脉冲频率RLE09位置控制误差过大:位置控制误差量大于设定容许值时动作1 .最大位置误差参数设定过小:确认最大位置误差参数P2-35 (位置控制误差过大警告条件)设定值,加大P2-35 (位置控制误差过大警告条件)设定值 2. 增益值设定过小:确认设定值是否适当,正确调整增益值 3. 扭矩限制过低:确认扭矩限制值,正确调整扭矩限制值 4. 外部负载过大:检查外部负载,减低外部负载或重新评估电机容量。
台达伺服常见故障分析与解决
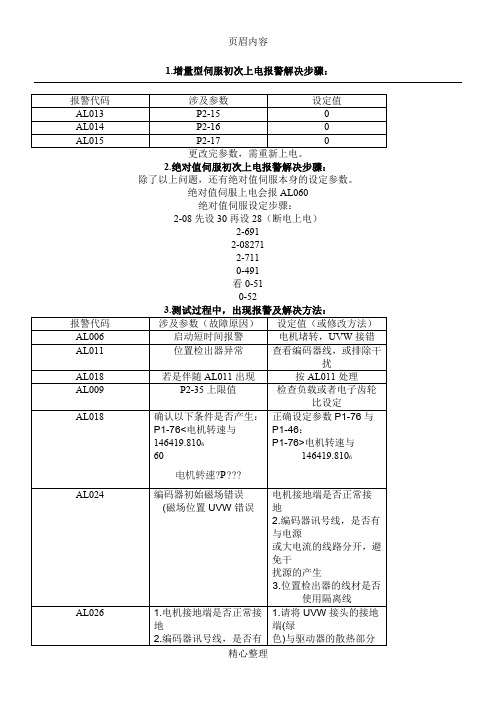
1•増量型伺服初次上电报警解决步骤:
更改完参数,需重新上电。
2.绝对值伺服初次上电报警解决步骤:
除了以上问题,还有绝对值伺服本身的设定参数。
绝对值伺服上电会报AL060
绝对值伺服设定步骤:
2-08先设30再设28 (断电上电)
2-69 1
2-08 271
2-71 1
0-49 1
看0-51
0-52
4.当运行过程中电机出现明显的抖动或震动:
需手动调增益看看效果
手动模式调增益:
当P2-32设定为0时,速度回路的比例增益(P2-04),积分增益(P2-06 ),和前馈增益(P2-07),可自由设定。
比例增益:增加增益会提高速度回路响应带宽
积分增益:增加增益会提髙速度回路低频刚度,并降低稳态误差。
前馈增益:降低相位落后误差
另外在排除干扰的过程中需要注意:
信号线归结在一起,电源线归结在一起。
两者之间至少保持30公分距离,以减少在运行过程中强电对弱电造成信号上的干扰!。
台达伺服常见故障分析与解决
1.增量型伺服初次上电报警解决步骤:报警代码涉及参数设定值AL013P2-15AL014P2-16AL015P2-17更改完参数,需重新上电。
绝对值伺服初次上电报警解决步骤:除了以上问题,还有绝对值伺服本身的设定参数。
绝对值伺服上电会报AL060绝对值伺服设定步骤:2-08 先设30 再设28(断电上电)2-69 12-08 2712-71 10-49 1看0-510-52测试过程中,出现报警及解决方法:报警代码涉及参数(故障原因)设定值(或修改方法)AL006启动短时间报警电机堵转,U V W 接错AL011位置检出器异常查看编码器线,或排除干扰AL018若是伴随AL011出现按AL011处理AL009P2-35上限值检查负载或者电子齿轮比设定AL018确认以下条件是否产生:P1-76<电机转速与1 46 4 19.8 10660电机转速 P正确设定参数P1-76 与P1-46:P1-76>电机转速与1 46 4 19.8 106AL024编码器初始磁场错误(磁场位置UVW 错误电机接地端是否正常接地2. 编码器讯号线,是否有与电源或大电流的线路分开,避免干扰源的产生3. 位置检出器的线材是否使用隔离线AL0261. 电机接地端是否正常接地2. 编码器讯号线,是否有与电源或大电流的线路分开,避免干扰源的产生3. 位置检出器的线材1. 请将UVW 接头的接地端(绿色)与驱动器的散热部分连接2. 请检查编码器讯号线,是否有与电源或大电流的线路确实的分隔开3. 请使用含隔离网的线材4.当运行过程中电机出现明显的抖动或震动:需手动调增益看看效果手动模式调增益:当P2-32设定为0时,速度回路的比例增益(P2-04),积分增益(P2-06),和前馈增益(P2-07),可自由设定。
比例增益:增加增益会提高速度回路响应带宽积分增益:增加增益会提高速度回路低频刚度,并降低稳态误差。
前馈增益:降低相位落后误差另外在排除干扰的过程中需要注意:。
台达伺服故障查询

1.绝对型伺服系统时,绝对型编码器设置设定步骤如下:1.确认P2-69参数目前设定值(0x0为INC ;0x1为ABS),P2-69如果有修改设定必须重新上电功能才会生效,此参数特性与P1-01属同一类型。
2.接上电池盒(已经连接编码器端与驱动器端,电池也安装上),首次上电会跳ALE60,此时需坐标初始化,ALE60才会消失。
3.坐标初始化有三个方法尚未作坐标初始化时驱动器会出现ALE60,可以透过以下初始化方式排除:(1)参数法:设定P2-08为271后,设定P2-71为0x1,,此时ALE60会消失,但是当电池电量低于3.1V会跳ALE61,否则正常情况面板看到会出现00000。
(2)DI法:设定ABSE(0x1D)与ABSC(0x1F),当ABSE(ON),ABSC设定由OFF变为ON,系统将进行坐标初始化,完成后编码器脉波将从重设为0且PUU将重设为P6-01数值。
(3)PR回原点法:若设定在PR控制模式时,可以执行PR回原点方式完成坐标初始化。
4.读取马达绝对位置:(1)设定P2-70决定马达绝对位置形式及读取方式设定,P2-70,bit0,DI/O读取单位设定,读取PUU(bit0=0)或Pulse(bit0=1)P2-70,bit1,通讯读取单位设定,读取PUU(bit1=0)或Pulse(bit1=1)(2)通讯读取马达位置单位为Pulse(P2-70=2,bit1=1,bit0=0):设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误差清除为0),P0-51代表马达绝对位置圈数,P0-52代表马达绝对位置脉波数(3)通讯读取马达位置单位为PUU(P2-70=0,bit1=0,bit0=0)设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误差清除为0),P0-51=0,P0-52代表马达绝对位置PUU5.透过上位控制器读取马达绝对位置信息P0-51及P0-526.(1)当编码器电源低于3.1V时会出现ALE61(2)当绝对型系统初次上电尚未完成坐标初始化、编码器电源低于1.2V或在低电压状况下更换编码器电池,均会发生ALE60:马达绝对位置遗失。
台达伺服报警查询

台达伺服驱动器异警处理RLE01:过电流:主回路电流值超越电机瞬间最大电流值1.5倍时动作1.驱动器输出短路:检查电机与驱动器接线状态或导线本体是否短路,排除短路状态,并防止金属导体外露 2. 电机接线异常:检查电机连接至驱动器的接线顺序,根据说明书的配线顺序重新配线 3. IGBT 异常:散热片温度异常,送回经销商或原厂检修 4. 控制参数设定异常:设定值是否远大于出厂预设值,回复至原出厂预设值,再逐量修正 5. 控制命令设定异常:检查控制输入命令是否变动过于剧烈,修正输入命令变动率或开启滤波功能RLE02:过电压:主回路电压值高于规格值时动作1.主回路输入电压高于额定容许电压值:用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1),使用正确电压源或串接稳压器 2. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器 3. 驱动器硬件故障:当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误,送回经销商或原厂检修RLE03:低电压:主回路电压值低于规格电压时动作1.主回路输入电压低于额定容许电压值:检查主回路输入电压接线是否正常,重新确认电压接线 2. 主回路无输入电压源:用电压计测定是否主回路电压正常,重新确认电源开关 3. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器RLE04:RLE04:Z 脉冲所对应磁场角度异常1.编码器损坏:编码器异常,更换电机 2. 编码器松脱:检视编码器接头,重新安装RLE05:回生错误:回生控制作动异常时动作1.回生电阻未接或过小:确认回生电阻的连接状况,重新连接回生电阻或计算回生电阻值 2. .回生用切换晶体管失效:检查回生用切换晶体管是否短路,送回经销商或原厂检修 3. 参数设定错误:确认回生电阻参数(P1-52)设定值与回生电阻容量参数(P1-53)设定,重新正确设定RLE06:过负载:电机及驱动器过负载时动作1.超过驱动器额定负载连续使用:可由驱动器状态显示P0-02设定为11后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载 2. 控制系统参数设定不当:机械系统是否摆振、加减速设定常数过快,调整控制回路增益值、加减速设定时间减慢 3. 电机、编码器接线错误:检查U、V、W 及编码器接线是否准确 4. 电机的编码器不良:送回经销商或原厂检修RLE07:过速度:电机控制速度超过正常速度过大时动作1.速度输入命令变动过剧:用信号检测计检测输入的模拟电压信号是否异常,调整输入变信号动率或开启滤波功能 2. 过速度判定参数设定不当:检查过速度设定参数P2-34(过速度警告条件)是否太小,检查过速度设定参数P2-34(过速度警告条件)是否太小RLE08:异常脉冲控制命令:脉冲命令的输入频率超过硬件界面容许值时动作1.脉冲命令频率高于额定输入频率:用脉冲频率检测计检测输入频率是否超过额定输入频率,正确设定输入脉冲频率RLE09:位置控制误差过大:位置控制误差量大于设定容许值时动作1.最大位置误差参数设定过小:确认最大位置误差参数P2-35(位置控制误差过大警告条件)设定值,加大P2-35 (位置控制误差过大警告条件)设定值 2. 增益值设定过小:确认设定值是否适当,正确调整增益值 3. 扭矩限制过低:确认扭矩限制值,正确调整扭矩限制值 4. 外部负载过大:检查外部负载,减低外部负载或重新评估电机容量。
台达伺服驱动器常见异常报警及其排除方法
.
'.
台达伺服驱动器常见异常报警及其排除方法
分析数据:
台达伺服驱动中设置许多报警信号,在一些意外状况下,及时保护驱动器和
电机免受损坏,现列出常见故障信号及解决方法。
ALM11编码器接线错误或编码器故障,请仔细检查编码器连接线,检查电机屏蔽线是否连接驱动器。
ALM06过载、电机动力线接线错,检查电机轴安装是否有偏。
ALM09动力线接线不良或电机编码器故障,检查动力线。
ALM03主回路输入电压过低,检查输入电源是否符合要求。
ALM22主回路电源缺相,检查电源线连接是否松动。
2、运行通则
严格遵循操作规程;防止数控装置过热;经常监视数控系统的电网电压;防止尘埃进入数控装置内;存储器用电池定期检查和更换。
数控系统编程、操作和维修人员必须经过专门的技术培训,熟悉所用数控机床的机械、数控系统、强电设备、液压、气源等部分及使用环境、加工条件等;能按机床和系统使用说明书的要求正确、合理地使用。
应尽量避免因操作不当引起的故障。
台达伺服报警查询

台达伺服驱动器异警处理RLE01:过电流:主回路电流值超越电机瞬间最大电流值1.5倍时动作1.2.驱动器输出短路:检查电机与驱动器接线状态或导线本体是否短路,排除短路状态,并防止金属导体外露 2. 电机接线异常:检查电机连接至驱动器的接线顺序,根据说明书的配线顺序重新配线 3. IGBT 异常:散热片温度异常,送回经销商或原厂检修 4. 控制参数设定异常:设定值是否远大于出厂预设值,回复至原出厂预设值,再逐量修正 5. 控制命令设定异常:检查控制输入命令是否变动过于剧烈,修正输入命令变动率或开启滤波功能RLE02:过电压:主回路电压值高于规格值时动作1.主回路输入电压高于额定容许电压值:用电压计测定主回路输入电压是否在额定容许电压值以内(参照11-1),使用正确电压源或串接稳压器 2. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器 3. 驱动器硬件故障:当电压计测定主回路输入电压在额定容许电压值以内仍然发生此错误,送回经销商或原厂检修RLE03:低电压:主回路电压值低于规格电压时动作1.主回路输入电压低于额定容许电压值:检查主回路输入电压接线是否正常,重新确认电压接线 2. 主回路无输入电压源:用电压计测定是否主回路电压正常,重新确认电源开关 3. 电源输入错误(非正确电源系统):用电压计测定电源系统是否与规格定义相符,使用正确电压源或串接变压器RLE04:RLE04:Z 脉冲所对应磁场角度异常1.2.编码器损坏:编码器异常,更换电机 2. 编码器松脱:检视编码器接头,重新安装RLE05:回生错误:回生控制作动异常时动作1.回生电阻未接或过小:确认回生电阻的连接状况,重新连接回生电阻或计算回生电阻值 2. .回生用切换晶体管失效:检查回生用切换晶体管是否短路,送回经销商或原厂检修 3. 参数设定错误:确认回生电阻参数(P1-52)设定值与回生电阻容量参数(P1-53)设定,重新正确设定RLE06:过负载:电机及驱动器过负载时动作1.超过驱动器额定负载连续使用:可由驱动器状态显示P0-02设定为11后,监视平均转矩[%]是否持续一直超过100%以上,提高电机容量或降低负载 2. 控制系统参数设定不当:机械系统是否摆振、加减速设定常数过快,调整控制回路增益值、加减速设定时间减慢 3. 电机、编码器接线错误:检查 U、V、W 及编码器接线是否准确 4. 电机的编码器不良:送回经销商或原厂检修RLE07:过速度:电机控制速度超过正常速度过大时动作1.2.速度输入命令变动过剧:用信号检测计检测输入的模拟电压信号是否异常,调整输入变信号动率或开启滤波功能 2. 过速度判定参数设定不当:检查过速度设定参数P2-34(过速度警告条件)是否太小,检查过速度设定参数P2-34(过速度警告条件)是否太小RLE08:异常脉冲控制命令:脉冲命令的输入频率超过硬件界面容许值时动作1.脉冲命令频率高于额定输入频率:用脉冲频率检测计检测输入频率是否超过额定输入频率,正确设定输入脉冲频率RLE09:位置控制误差过大:位置控制误差量大于设定容许值时动作1.2.最大位置误差参数设定过小:确认最大位置误差参数P2-35(位置控制误差过大警告条件)设定值,加大 P2-35 (位置控制误差过大警告条件)设定值 2. 增益值设定过小:确认设定值是否适当,正确调整增益值 3. 扭矩限制过低:确认扭矩限制值,正确调整扭矩限制值 4. 外部负载过大:检查外部负载,减低外部负载或重新评估电机容量。
台达伺服常见故障分析与解决
1.增量型伺服初次上电报警解决步骤:报警代码涉及参数设定值AL013 P2-15 0AL014 P2-16 0AL015 P2-17 0更改完参数,需重新上电。
2.绝对值伺服初次上电报警解决步骤:除了以上问题,还有绝对值伺服本身的设定参数。
绝对值伺服上电会报AL060绝对值伺服设定步骤:2-08先设30再设28(断电上电)2-6912-082712-7110-491看0-510-523.测试过程中,出现报警及解决方法:报警代码涉及参数(故障原因)设定值(或修改方法)AL006 启动短时间报警电机堵转,UVW接错AL011 位置检出器异常查看编码器线,或排除干扰AL018 若是伴随AL011出现按AL011处理AL009 P2-35上限值检查负载或者电子齿轮比设定AL018 确认以下条件是否产生:P1-76<电机转速与146419.810660电机转速?P???正确设定参数P1-76与P1-46:P1-76>电机转速与146419.8106AL024 编码器初始磁场错误(磁场位置UVW错误电机接地端是否正常接地2.编码器讯号线,是否有与电源或大电流的线路分开,避免干扰源的产生3.位置检出器的线材是否使用隔离线AL026 1.电机接地端是否正常接地2.编码器讯号线,是否有1.请将UVW接头的接地端(绿色)与驱动器的散热部分与电源或大电流的线路分开,避免干扰源的产生3.位置检出器的线材连接2.请检查编码器讯号线,是否有与电源或大电流的线路确实的分隔开3.请使用含隔离网的线材4.当运行过程中电机出现明显的抖动或震动:需手动调增益看看效果手动模式调增益:当P2-32设定为0时,速度回路的比例增益(P2-04),积分增益(P2-06),和前馈增益(P2-07),可自由设定。
比例增益:增加增益会提高速度回路响应带宽积分增益:增加增益会提高速度回路低频刚度,并降低稳态误差。
前馈增益:降低相位落后误差另外在排除干扰的过程中需要注意:信号线归结在一起,电源线归结在一起。
台达伺服驱动器常见异常报警及其排除方法

台达伺服驱动器常见异常报警及其排除方法1.过压报警:这是指伺服驱动器输入电压超过额定值引起的报警。
解决方法包括:-检查电源供应是否符合要求,确保输入电压稳定。
-检查线路连接是否正确,排除接线问题。
-检查电源模块是否损坏,如需要更换。
2.过流报警:这是指伺服驱动器输出电流超过额定值引起的报警。
解决方法包括:-检查负载是否过重,根据实际负载情况调整设定参数。
-检查伺服驱动器输出是否短路,排除短路问题。
-检查伺服驱动器内部电路是否损坏,如需要更换相关部件。
3.过速报警:这是指伺服驱动器转速超过额定值引起的报警。
解决方法包括:-检查伺服电机控制系统的参数设置,调整相应参数限制最大速度。
-检查反馈装置是否正确安装、接线是否良好。
-检查伺服电机机械结构是否出现故障,如需要修复相应部件。
4.过载报警:这是指伺服驱动器输出力矩超过额定值引起的报警。
解决方法包括:-检查伺服电机负载情况,确保负载在驱动器输出范围内。
-检查伺服电机输出轴与负载连接部位是否松动,如需要紧固。
-检查伺服电机是否需要进行电流限制调整。
5.过热报警:这是指伺服驱动器内部温度过高引起的报警。
解决方法包括:-检查伺服驱动器散热设备是否正常工作,如需要清洁或更换。
-检查环境温度是否过高,如需要增加散热设备。
-检查输出功率是否过大,根据实际情况调整负载或功率。
6.通信报警:这是指伺服驱动器与上位机通信异常引起的报警。
解决方法包括:-检查通信线路连接是否正常,确保连接稳定。
-检查通信协议参数是否设置正确,如波特率、数据位等。
-检查上位机软件设置是否正确,如通信端口等。
台达驱动器故障代码查询与解决办法

CE通信异常检查通讯信号有无反接(RJ11)
检查通讯格式是否正确
CCODE软件保护启动显示CcodE送厂维修
显示PcodE为密码锁定
ANLER模拟信号错误
PG回授信号错误
检查参数设定(Pr 10-00)和AVI/ACI的线路
检查系统反应时间回授信号侦测时间之间的所有可
能发生的错误(Pr 10-08)
LU交流电机驱动器内部直流高压侧过低
检查输入电源电压是否正常
检查负载是否有突然的重载是否三相机种单相电源入力或欠相
OL输出电流超过交流电机驱动器可承受的电流,若输出150%的交流电机驱动器额定电流,可承受60秒。
检查电机否过பைடு நூலகம்载
减低(07-02)转矩提升设定值
增加交流电机驱动器输出容量
OL1内部电子热动电驿保护动作
停止输出清除故障来源后按”RESET”键即可
EF当外部多功能输入端子(MI1~MI6)设定紧
EF1急停止时,交流电机驱动器停止输出清除故障来源后按”RESET”键即可
CF1内部存贮器IC资料写入异常送厂维修
CF2内部存贮器IC资料读出异常按下RESET键将参数重置为出厂设定
若方法无效,则送厂维修
CF3.3交流电机驱动器侦测线路异常U-相电流感测器异常,请送厂维修
台达驱动器故障代码查询与解决办法
OCC交流电机驱动器侦测输出侧有异常突增的过电流产生
检查电机额定与交流电机驱动器额定是否相匹配
检查交流电机驱动器U-V-W间有无短路
检查与电机连线是否有短路现象或接地
检查交流电机驱动器与电机的螺丝有无松动加长加速时间
检查是否电机是否有超额负载
OU交流电机驱动器侦测内部直流高压侧有过电压现象产生
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.绝对型伺服系统时,绝对型编码器设置
设定步骤如下:
1.确认P2-69参数目前设定值(0x0为INC ;0x1为ABS),P2-69如果有修改设定必须重新上电功能才会生效,此参数特性与P1-01属同一类型。
2.接上电池盒(已经连接编码器端与驱动器端,电池也安装上),首次上电会跳ALE60,此时需坐标初始化,ALE60才会消失。
3.坐标初始化有三个方法
尚未作坐标初始化时驱动器会出现ALE60,可以透过以下初始化方式排除:
(1)参数法:
设定P2-08为271后,设定P2-71为0x1,,此时ALE60会消失,但是当电池电量低于3.1V会跳ALE61,否则正常情况面板看到会出现00000。
(2)DI法:
设定ABSE(0x1D)与ABSC(0x1F),当ABSE(ON),ABSC设定由OFF变为ON,系统将进行坐标初始化,完成后编码器脉波将从重设为0且PUU将重设为P6-01数值。
(3)PR回原点法:
若设定在PR控制模式时,可以执行PR回原点方式完成坐标初始化。
4.读取马达绝对位置:
(1)设定P2-70决定马达绝对位置形式及读取方式设定,
P2-70,bit0,DI/O读取单位设定,读取PUU(bit0=0)或Pulse(bit0=1)
P2-70,bit1,通讯读取单位设定,读取PUU(bit1=0)或Pulse(bit1=1)
(2)通讯读取马达位置单位为Pulse(P2-70=2,bit1=1,bit0=0):
设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误差清除为0),P0-51代表马达绝对位置圈数,P0-52代表马达绝对位置脉波数
(3)通讯读取马达位置单位为PUU(P2-70=0,bit1=0,bit0=0)
设定P0-49=1或2(1:只更新编码器数据;2:更新编码器数据并将位置误差清除为0),P0-51=0,P0-52代表马达绝对位置PUU
5.透过上位控制器读取马达绝对位置信息P0-51及P0-52
6.(1)当编码器电源低于3.1V时会出现ALE61
(2)当绝对型系统初次上电尚未完成坐标初始化、编码器电源低于1.2V或在低电压状况下更换编码器电池,均会发生ALE60:马达绝对位置遗失。
(3)使用非绝对型编码器系统时,开启绝对型功能设定P2-69=1时,会发生ALE69:马达性是错误异常。
(4)编码器绝对位置Pulse型式圈数溢位时会发生ALE62;PUU形式溢位时会发生ALE289。
2.台达伺服交流马达驱动器在选型上如何善用减速机?
答驱动器参数群组09-xx为通讯参数,用户可在此群组中设定所有相关的通讯参数。
在机械系统上,减速机除了改变终端与速度端的速度比之外,还能够降低终端惯量。
其公式如下:
举个例子来说,若是负载惯量为1000Kgm2;使用5比减速机,则惯量就缩小为40 Kgm2;使用10比减速机,则惯量缩小为10 Kgm2。
相同的机构下,如果机台操作速度固定,则马达需要输出的扭力也随惯量减少而减少,但需要考虑是否马达已达转速上限(3000RPM or 5000RPM)
如马达转速上有余裕的情况下,选用适当的减速机,不但能降低惯量,将马达转速提升,并且可选用低一级的马达,来达到优化搭配。
3 A2伺服如何在位置模式(PT mode)设定全死循环功能
答STEP1:接线确认
CN5位置反馈信号接头(全闭回路)
提供外部光学尺或编码器(A, B, Z格式),连接伺服形成全死循环回路。
在位置模式,由上位机所下的脉冲位置命令便是参考外部的光学尺控制回路架构,可参照手册第六章。
STEP2:先确认驱动器的控制模式不在全死循环模式下
P1-74:
全死循环未完成设定好时,P1-74 “全死循环功能开关” 字段必需为0
STEP3:准备好PC软件,先将P1-72设定为80000
STEP4:准备好PC软件的示波器,
选择马达回授(1280000/rev)与光学尺回授观察(两个CHANNEL圴为32位)
STEP5:马达一转时,光学尺对应脉波量计算:
假设客户使用螺杆,则客户会提供螺杆的Pitch,也会提供光学尺的分辨率
以一个Pitch为5mm,光学尺分辨率为0.5um的应用,则可以计算出,马达一转时,光学尺回授论理上应为
将伺服启动,在安全不会撞机的前提下,利用JOG功能,低转速让马达往一个方向移动,此时观察马达与光学尺回授,例子如下图:
以上图为例,利用示波器观察数值差量的功能,量得在同一段时间内,马达编码器回授走了2326786个位移量,而光学尺回授走了-18178个位移量,此时利用公式:
,可以求得马达一转时,光学尺对应脉波量约等于10000
假如客户不是使用螺杆这种可以得知马达单回转时光学尺脉波量的应用时,请利用上述方法来计算马达单回转时光学尺脉波量
假如客户是使用螺杆这种可以得知马达单回转时光学尺脉波量的应用时,请利用上述方法来确认马达单回转时光学尺脉波量是否跟理论值相近
STEP6:以上图为例子,可以发现光学尺的脉波增加方向与马达回授相反,此时利用P1-74的”光学尺回授正反相选择” 设定为1,把回授讯号反向后,两个脉波的增加方向会一致如下图
STEP6:请让马达进行正反转的动作,确认正反转回授脉波量都是正常
上升时,运算出"马达一回转时光学尺的脉波量"约为10000,且增加方向同向
下降时,运算出"马达一回转时光学尺的脉波量"也约为10000,且增加方向同向
STEP7:
若螺杆类型的应用,实测后,实际与理论的"马达一回转时光学尺的脉波量" 相近,则根据理论值设定好P1-72
若其他无法得知理论的“马达一回转时光学尺的脉波量”应用,则利用实际的“马达一
回转时光学尺的脉波量” 设定好P1-72
STEP8:
设定好P1-72与P1-74的"光学尺回授正反相选择" 后,此时可以将P1-74 “全死循环功能” 打开
注意事项:当使用全死循环时,回授讯号主要是参考光学尺,因此命令坐标是以光学尺为主,也就是,当齿比为1:1的状况下,脉波命令下1,就会去追随光学尺回授1,必需注意齿轮比的使用与非全死循环时使用不可搞混
4 何谓伺服的低频摆振?当发生低频摆振时如何处理?
答若系统刚性不足,在定位命令结束后,即使马达本身已经接近静止,机械传动端仍会出现持续摆动。
低频抑振功能可以用来减缓机械传动端摆动的现象。
低频抑振的范围为1.0 ~ 100.0Hz。
本功能提供手动设定与自动设定,但目前只有ASDA-A2系列机种支持此功能。
低频抑振方式分为自动及手动方式:
(1) 自动设定
若用户难以直接知道频率的发生点,可以开启自动低频抑振功能。
此功能会自动寻找低频摆动的频率。
若P1-29设定为1时,系统会先自动关闭低频抑振滤波功能,并开始自动寻找低频的摆动频率。
当自动侦测到的频率维持固定后,P1-29会自动设回0,并会将第一摆动频率设定在P1-25且P1-26设为1。
第二摆动频率设定在P1-27且将P1-28设为1。
当P1-29自动设回零后,低频摆动依然存在,请检查低频抑振P1-26或P1-28是否已被自动开启。
若P1-26与P1-28皆为零,代表没有侦测到任何频率,此时请减少低频摆动检测准位P1-30,并设定P1-29 = 1,重新寻找低频的摆动频率。
(2) 手动设定
低频抑振有两组低频抑振滤波器,第一组为参数P1-25 ~ P1-26,第二组为参数P1-27 ~ P1-28。
可以利用这两组滤波器来减缓两个不同频率的低频摆动。
参数P1-25与P1-27用来设定低频摆动所发生的频率,低频抑振功能唯有在低频抑振频率参数设定与真实的摆动频率接近时,才会抑制低频的机械传动端的摆动。
参数P1-26与P1-28用来设定经滤波处理后的响应,当P1-26与P1-28设定越大响应越好,但设太大容易使得马达行走不顺。
参数P1-26与P1-28出厂值默认值为零,代表两组滤波器的功能皆被关闭。