现场总线CAN原理与应用技术综述报告
现场总线报告CAN

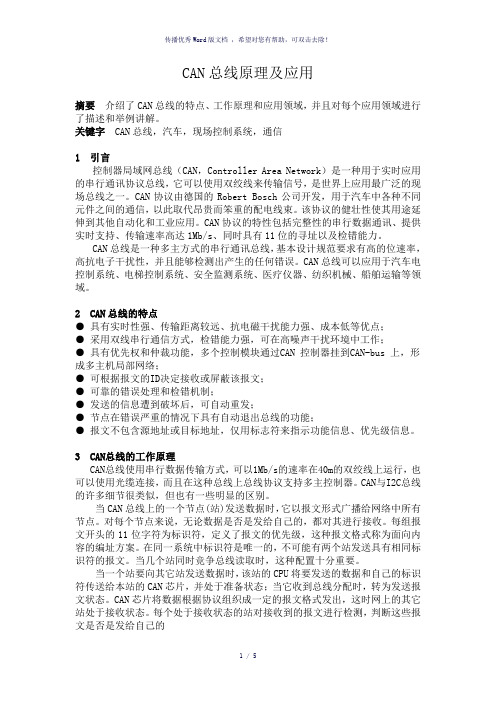
Control unit 2
CAN bus wiring
Matching 陈虹实验室 汽车电子小组
现场总线培训教程 - 陈虹课题组
基于现场总线的网络控制及其应用-陈虹实验室 汽车电子小组
现场总线培训教程 - 陈虹课题组
1-隐性(Recessive) 0-显性(Dominant)
(7) 故障封闭 CAN 可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等)还是 持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当 总线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
(8) 连接CAN 总线是可同时连接多个单元的总线。可连接的单元总数理论上 是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的 限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单 元数减少。
基于现场总线的网络控制及其应用-陈虹实验室 汽车电子小组
现场总线培训教程 - 陈虹课题组
(3) 系统的柔软性 与总线相连的单元没有类似于“地址”的信息。因此在总线上增加 单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
(4) 通信速度 根据整个网络的规模,可设定适合的通信速度。在同一网络中, 所有单元必须设定成统一的通信速度。即使有一个单元的通信速 度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的 通信。不同网络间则可以有不同的通信速度。
基于现场总线的网络控制及其应用-陈虹实验室 汽车电子小组
现场总线培训教程 - 陈虹课题组
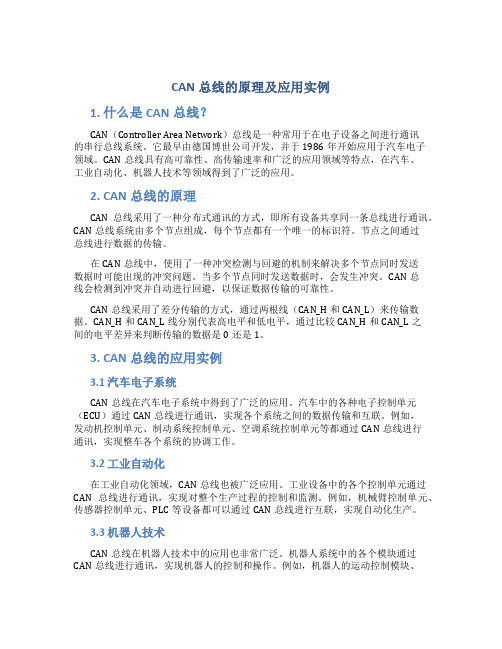
通信速度和最大总线长度的关系
基于现场总线的网络控制及其应用-陈虹实验室 汽车电子小组
现场总线培训教程 - 陈虹课题组
1、基本概念
CAN总线元件
CAN总线原理与技术应用

CAN总线原理与技术应用CAN(Controller Area Network,控制器局域网络)总线是一种常用于车辆电子系统的通讯协议。
由于CAN总线具有速度快、可靠性高、数据传输安全等优点,因此在汽车、工业自动化等领域得以广泛应用。
物理层:CAN总线使用双绞线作为传输介质,支持两种传输速率,即高速CAN和低速CAN。
高速CAN的传输速率可达1 Mbps,主要用于大部分车辆内部的通信;低速CAN的传输速率为100 kbps,主要用于外部设备和主机之间的通信。
数据链路层:数据链路层负责确保数据的正确传输。
CAN总线采用了一种基于确认应答的传输机制,发送端发送数据后,接收端需要返回一个确认应答,以确保数据的正确接收。
如果发送端没有收到应答,将重新发送数据,直到收到正确的应答位置。
网络层:网络层对发送的数据进行优先级处理,以确保重要数据的传输和处理。
CAN总线使用了CID(CAN Identifier,CAN标识符)来标识不同数据的优先级。
CID的长度为11位或29位,优先级高的CID具有更短的标识符,从而能够获得更高的发送优先级。
应用层:应用层是CAN总线与上层系统(如ECU,Electronic Control Unit)之间的接口。
ECU是车辆电子系统的核心部分,用于控制发动机、转向系统、车身电子系统等。
CAN总线通过与ECU的连接,实现了系统之间的数据共享和通信。
在汽车领域,CAN总线被用于连接车内各种控制单元,实现整车系统的数据共享和协调控制。
通过CAN总线,不同的控制单元可以相互通信,从而提高整车系统的可靠性和性能。
例如,发动机控制单元可以通过CAN总线与车速传感器和氧传感器等外部设备进行通信,实时控制发动机工作状态。
在工业自动化领域,CAN总线被用于连接各种工业设备,实现设备之间的数据传输和控制。
通过CAN总线,不同的设备可以实现数据共享和协同工作。
例如,生产线上的传感器和执行器可以通过CAN总线与PLC (Programmable Logic Controller,可编程逻辑控制器)进行连接,实现自动化控制。
CAN总线技术及其应用
CAN总线技术及其应用[摘要]CAN是国际上应用最广泛的现场总线之一。
本文主要分析了CAN总线的技术特点及其应用趋势,对CAN总线在汽车领域的应用进行了深入的分析。
[关键词]CAN总线;汽车;应用在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986年德国电气商博世公司开发出面向汽车的CAN(Controllor Area Networh)通信协议。
此后,CAN通过ISO11898及ISO11519进行了标准化,在欧洲已是汽车网络的标准协议。
CAN的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
在北美和西欧西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
1CAN总线技术原理简介1.1CAN总线的分层结构CAN协议定义了ISO/OSI参考模型的物理层及数据链路层[1],如下图所示。
CAN的ISO/OSI参考模型的层结构物理层定义信号是如何实际传输,涉及位定时、位编码/解码、同步的解释。
数据链路层包含介质访问控制子层MAC(Medium Access Control)和逻辑链路控制子层LLC(Logical Link Control)。
其中,MAC子层是CAN协议的核心,负责报文分帧、仲裁、应答、错误检测和标定,把接收到的报文提供给LLC子层,并接受来自LLC子层的报文;LC子层涉及报文滤波、过载通知和恢复管理。
CAN现场总线监控系统原理和应用设计
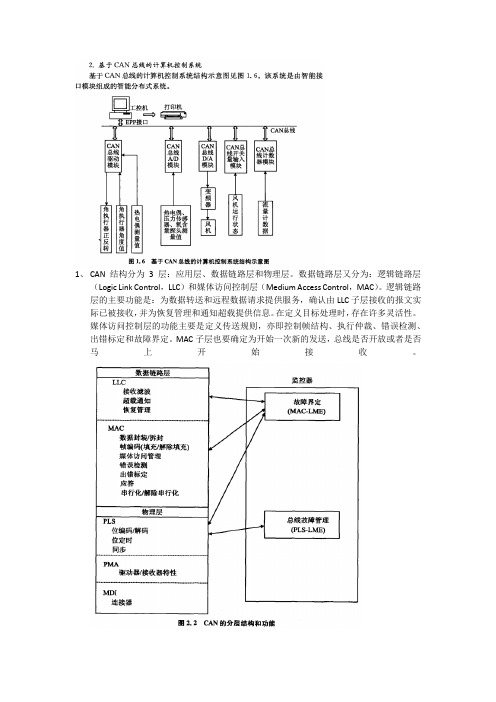
1、CAN结构分为3层:应用层、数据链路层和物理层。
数据链路层又分为:逻辑链路层(LogicLink Control,LLC)和媒体访问控制层(Medium Access Control,MAC)。
逻辑链路层的主要功能是:为数据转送和远程数据请求提供服务,确认由LLC子层接收的报文实际已被接收,并为恢复管理和通知超载提供信息。
在定义目标处理时,存在许多灵活性。
媒体访问控制层的功能主要是定义传送规则,亦即控制帧结构、执行仲裁、错误检测、出错标定和故障界定。
MAC子层也要确定为开始一次新的发送,总线是否开放或者是否马上开始接收。
2、CAN总线是串行通信网络,具有可靠性、实时性和灵活性特点。
(1)、以多主方式工作,网络上任意节点均可以在任意时刻主动向网络上的其他节点发送信息,不分主从,通信方式灵活,而且无需占地址等信息;(2)、CAN网络上的节点信息分不同的优先级,满足不同的实时要求;(3)、当多个节点同时向总线发送信息时,优先级低的节点会主动地退出发送,而优先级最高的节点可不受影响继续传送数据;(4)、CAN只需要通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式来传输数据,无需专门的调度;(5)、CAN上的节点数主要取决于总线驱动电路;(6)、采用短帧结构,传输时间短,受干扰概率低,具有良好的检错效果。
每帧信息都有CRC校验和其他检错措施;(7)、CAN节点在错误严重的情况下具有自动关闭输出的功能;(8)、CAN的时间延时是不确定的,只有具有最高优先权的帧延时是确定的。
3、(1)报文,总线上的信息以不同固定格式的报文发送,长度有限制,当总线开放时,任何连接的单元均可以开始发送一个新报文;(2)节点可以在不要求所有节点积其应用层改变任何软件和硬件的情况下,接入CAN网络;(3)在CAN网络中报文可以确保被所有节点或者指定节点接收;(4)CAN节点能识别永久性故障和短暂扰动,可以自动关闭故障节点;(5)有错误检测功能,措施包括发送自检、循环冗余校验、位填充和报文格式检查;(6)非归零码即未流中每位的逻辑电平在整个位时间内保持不变,或者隐性电平或者显性电平。
现场总线实验报告

现场总线实验报告现场总线实验报告引言:现场总线(Fieldbus)是一种用于工业自动化领域的通信协议,它将传感器、执行器和控制器等设备连接在同一条总线上,实现设备之间的数据交换和控制指令传输。
本实验旨在通过对现场总线的实际应用进行研究和探索,了解其原理和优势。
一、现场总线的基本原理现场总线是一种基于串行通信的网络协议,它使用单根通信线路连接各个设备,通过总线控制器实现数据的传输和设备的控制。
其基本原理是将各个设备连接在同一条总线上,通过总线控制器进行数据的传输和设备的控制,实现实时监测和控制。
二、现场总线的应用领域现场总线广泛应用于工业自动化领域,包括制造业、能源、交通等行业。
它可以实现设备之间的实时通信和数据交换,提高生产效率和质量。
例如,在制造业中,现场总线可以用于机器人控制、生产线监测和设备故障诊断等方面,实现自动化生产和智能制造。
三、现场总线的优势与传统的点对点通信方式相比,现场总线具有以下优势:1. 灵活性:现场总线可以连接多个设备,方便设备的添加和移除,减少了布线和维护的成本。
2. 实时性:现场总线能够实现设备之间的实时通信和数据交换,提高了生产过程的响应速度和准确性。
3. 可靠性:现场总线采用冗余设计和错误检测机制,能够保证数据的可靠传输和设备的可靠运行。
4. 扩展性:现场总线支持多种通信协议和设备接口,可以满足不同设备的需求,便于系统的扩展和升级。
四、实验过程和结果本次实验选取了一台工业机器人和几个传感器作为实验对象,通过现场总线连接它们,并利用总线控制器进行数据的传输和设备的控制。
实验过程中,我们使用了现场总线配置工具对设备进行初始化和参数设置,然后通过编程控制总线控制器发送指令和接收数据。
实验结果显示,通过现场总线,我们能够实时监测机器人的运动状态和传感器的数据,并能够远程控制机器人的动作。
同时,现场总线还能够实现故障诊断和报警功能,及时发现并处理设备故障,保证生产过程的稳定性和安全性。
can总线报告资料
can总线报告资料一、概述CAN(Controller Area Network)总线是一种广泛应用于汽车和工业领域的串行通信协议。
它具有高可靠性、高实时性和高带宽的特点,被广泛应用于车辆电子控制系统、工业自动化控制系统等领域。
本报告旨在介绍CAN总线的基本原理、应用领域和技术特点。
二、CAN总线的基本原理1. 物理层CAN总线采用双绞线进行数据传输,通信速率可达到1Mbps。
它采用差分信号传输,具有抗干扰能力强的特点。
CAN总线的物理层标准有CAN 2.0A和CAN 2.0B两种,分别适用于不同的应用场景。
2. 数据链路层CAN总线采用CSMA/CD(Carrier Sense Multiple Access with Collision Detection)的数据链路层协议。
它通过监听总线上的数据活动来实现多节点之间的数据传输。
当多个节点同时发送数据时,会发生冲突,此时通过冲突检测和重新发送机制来解决冲突问题。
3. 帧格式CAN总线的数据传输以帧为单位进行。
CAN帧由起始位、标识符、控制位、数据域和校验位组成。
其中,标识符用于区分不同的数据帧,数据域用于传输实际数据,校验位用于检测数据的正确性。
三、CAN总线的应用领域1. 汽车电子控制系统CAN总线被广泛应用于汽车电子控制系统,如发动机控制单元(ECU)、制动系统、空调系统等。
它可以实现多个控制单元之间的高速数据传输和实时协同工作,提高整车的性能和安全性。
2. 工业自动化控制系统CAN总线在工业自动化领域的应用也非常广泛。
它可以连接各种传感器、执行器和控制器,实现工业设备之间的数据交换和控制。
通过CAN总线,工业自动化系统可以实现高效、可靠的数据传输和实时控制。
3. 其他领域除了汽车和工业领域,CAN总线还被应用于其他领域,如航空航天、医疗设备、军事装备等。
它的高可靠性和实时性使得CAN总线成为这些领域中的首选通信协议。
四、CAN总线的技术特点1. 高可靠性CAN总线采用差分信号传输和冲突检测机制,具有抗干扰能力强的特点。
现场总线can原理与应用技术

现场总线can原理与应用技术嘿,朋友!想象一下这样一个场景,在一个繁忙的工厂车间里,机器轰鸣,工人们紧张而有序地忙碌着。
各种设备仿佛有了生命一般,有条不紊地运行着,而在这背后,有一种神奇的技术在默默发挥着作用,那就是现场总线 CAN 。
CAN ,这个听起来有点神秘的名字,其实就像是一个超级厉害的“信息快递员”。
它能让不同的设备之间快速、准确地交流和共享信息。
先来说说 CAN 的原理吧。
它就像是一个高效的交通指挥系统。
想象一下,在一条宽阔的马路上,车辆来来往往,如果没有交通规则和指挥,那肯定会乱成一团。
而 CAN 呢,给这些设备之间的数据传输制定了一套清晰明确的规则。
它通过一种独特的方式发送和接收数据。
每个设备都能像一个聪明的“发言人”和“倾听者”,在适当的时候发言,又能认真倾听别人的话。
而且,CAN 还特别“坚强”,不会轻易被干扰和出错。
就算出现了一些小问题,它也能迅速自我修复,继续保证信息的准确传递。
那 CAN 到底有啥应用呢?这可就多啦!比如说在汽车领域,它就像是汽车的“神经中枢”。
车辆的各种部件,像发动机、制动系统、仪表盘等等,都通过 CAN 总线紧密相连。
这样一来,车辆的运行状态就能实时被监测和控制,大大提高了安全性和性能。
再看看工业自动化领域,CAN 总线让各种生产设备能够协同工作,就像是一支训练有素的交响乐团。
每个乐器(设备)都能在正确的时间奏出美妙的音符(发挥作用),共同演奏出高效生产的乐章。
在智能家居中,CAN 也有出色的表现。
想象一下,当你回到家,灯光自动亮起,空调调整到舒适的温度,这背后说不定就有 CAN 总线在默默工作呢。
你可能会问,这 CAN 总线就这么完美吗?当然不是啦!就像人无完人一样,CAN 总线也有它的局限性。
比如在传输距离和速度上,就会受到一定的限制。
但这并不妨碍它在很多领域大显身手。
总之,现场总线 CAN 技术就像是一个默默无闻的幕后英雄,在我们的生活中发挥着重要的作用。
现场总线技术及其应用
01
现场总线技术的应用领域
工业自动化
总结词
现场总线技术在工业自动化领域的应用非常广泛,它 简化了工业控制系统的结构,提高了控制精度和可靠 性,降低了设备和系统的维护成本。
详细描述
现场总线技术最初是为了满足工业生产现场的需求而 发展起来的。在工业自动化领域,现场总线技术被广 泛应用于各种生产设备之间的通信和控制系统,如数 控机床、机器人、温度控制器等。通过现场总线技术 ,这些设备可以相互连接并进行数据交换,从而实现 更加精确和可靠的生产控制。此外,现场总线技术还 可以用于工业生产现场的远程监控和管理,使得管理 人员可以随时了解生产现场的情况,及时发现并解决 问题。
现场总线技术及其应用
汇报人: 日期:
contents
目录
• 现场总线技术概述 • 现场总线技术的体系结构 • 现场总线技术的通信协议 • 现场总线技术的应用领域 • 现场总线技术的展望与发展趋势 • 现场总线技术应用案例分析
01
现场总线技术概述
定义和特点
定义
现场总线是一种用于工业自动化领域的数据通信协议,它允许设备之间进行数字通信,以实现设备间 的数据交换和控制操作。
01
现场总线技术的体系结构
物理层
物理层的定义
物理层是现场总线技术的最底层 ,负责在通信设备之间传输原始 比特流,涉及机械、电气、定时
和同步等方面。
物理层的特性
物理层具有规范化的物理设备接 口,如电缆、连接器、终端电阻 等,并规定了通信设备的电气特
性,如电压、电流等。
物理层的关键技术
物理层的关键技术包括信号编码 、同步和传输技术等,以保证信
网络安全问题
随着现场总线技术的广泛应用,网络安全问题也变得越来 越重要。需要采取有效的措施来确保数据的安全性和可靠 性。
现场总线实验报告

一、实验目的1. 理解现场总线的基本概念和原理。
2. 掌握现场总线的硬件连接和软件配置方法。
3. 学习使用现场总线进行数据传输和设备控制。
4. 分析现场总线在实际应用中的优缺点。
二、实验原理现场总线(Field Bus)是一种用于工业自动化领域的通信网络,主要用于连接现场设备和控制系统。
它具有以下特点:1. 串行通信:现场总线采用串行通信方式,可以实现多节点之间的数据传输。
2. 多点通信:现场总线支持多点通信,可以实现多个设备之间的数据交换。
3. 抗干扰能力强:现场总线具有较好的抗干扰能力,可以在恶劣的工业环境中稳定运行。
本实验采用CAN总线(Controller Area Network)作为现场总线的通信协议,其基本原理如下:1. CAN总线采用双绞线作为传输介质,具有较高的抗干扰能力。
2. CAN总线采用多主从通信方式,任何一个节点都可以主动发送数据。
3. CAN总线采用帧结构进行数据传输,包括标识符、数据、校验和等字段。
三、实验内容1. 硬件连接(1)连接CAN总线模块和单片机开发板。
(2)连接电源线和地线。
(3)连接杜邦线,将CAN模块的TXD、RXD、GND等引脚与单片机开发板的相应引脚连接。
2. 软件配置(1)编写单片机程序,初始化CAN控制器,配置波特率、消息ID、接收滤波器等参数。
(2)编写数据发送和接收程序,实现节点之间的数据传输。
3. 实验步骤(1)启动单片机程序,初始化CAN控制器。
(2)发送数据:在主节点上编写发送程序,发送一个数据帧。
(3)接收数据:在从节点上编写接收程序,接收主节点发送的数据帧。
(4)分析接收到的数据,验证数据传输的正确性。
四、实验结果与分析1. 数据传输成功通过实验,成功实现了主从节点之间的数据传输。
发送的数据帧被从节点正确接收,验证了现场总线通信的正确性。
2. 波特率设置实验中,根据实际需求设置了不同的波特率。
结果表明,在不同波特率下,数据传输仍然稳定可靠。
现场总线技术及其应用
案例三:城市交通信号控制系统应用
总结词
利用现场总线技术实现城市交通信号的智能控制,提高 交通流畅度和安全性。
详细描述
在城市交通管理中,采用现场总线技术构建交通信号控 制系统,实现各个路口信号灯的实时通信和控制。通过 实时数据采集和智能算法,优化信号灯的配时方案,提 高交通流畅度和安全性,缓解城市交通拥堵问题。
在工业自动化领域,常见的现场总线 技术包括PROFIBUS、Modbus、 EtherNet/IP等。
智能建筑
智能建筑是现场总线技术的另一个重 要应用领域。通过现场总线,可以实 现建筑物内各种设备(如照明、空调 、安防等)的集中控制和管理,提高 建筑物的能源利用效率和舒适度。
VS
在智能建筑领域,常见的现场总线技 术包括LonWorks、CAN等。
智能交通系统
智能交通系统是现场总线技术的重要应用方 向之一。通过现场总线,可以实现交通信号 灯、监控摄像头等交通设施的集中控制和数 据传输,提高交通效率和安全性。
在智能交通系统领域,常见的现场总线技术 包括FlexRay、TTCAN等。
医疗设备
医疗设备是现场总线技术的重要应用 领域之一。通过现场总线,可以实现 医疗设备的集中控制和数据传输,提 高医疗设备的可靠性和安全性。
02
现场总线技术种类
PROFIBUS
德国标准总线
PROFIBUS是一种用于工业自动化的现场总线标准,由德国标准委员会制定。它 支持多种通信协议,广泛应用于制造业、过程控制和楼宇自动化等领域。
CAN总线
控制器局域网
CAN总线是一种用于汽车和工业自动化领域的现场总线标准。它支持分布式实时控制,具有高可靠性和灵活性,广泛应用于 汽车电子、智能交通和工业自动化等领域。
CAN总线原理及应用
CAN总线原理及应用摘要介绍了CAN总线的特点、工作原理和应用领域,并且对每个应用领域进行了描述和举例讲解。
关键字 CAN总线,汽车,现场控制系统,通信1 引言控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。
CAN协议由德国的Robert Bosch公司开发,用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。
该协议的健壮性使其用途延伸到其他自动化和工业应用。
CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。
CAN总线是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电子干扰性,并且能够检测出产生的任何错误。
CAN总线可以应用于汽车电控制系统、电梯控制系统、安全监测系统、医疗仪器、纺织机械、船舶运输等领域。
2 CAN总线的特点●具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;●采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;●具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;●可根据报文的ID决定接收或屏蔽该报文;●可靠的错误处理和检错机制;●发送的信息遭到破坏后,可自动重发;●节点在错误严重的情况下具有自动退出总线的功能;●报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
3 CAN总线的工作原理CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。
CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。
对每个节点来说,无论数据是否是发给自己的,都对其进行接收。
can总线技术期末总结

can总线技术期末总结一、引言CAN(Controller Area Network,控制器局域网)总线技术是一种在工控领域广泛使用的通信协议和物理介质。
本文将从CAN总线技术的发展历程、工作原理、应用领域以及未来发展等方面进行总结。
二、发展历程CAN总线技术最早源于德国宝马公司的研究项目,用于车辆电子系统的通信。
随着应用拓展,CAN总线技术被广泛应用于工业控制系统、机车车辆控制系统以及其他需要高可靠性和实时性的领域。
CAN总线技术于1986年首次在精确电气汽车传动系统中使用,并在1991年成为国际标准(ISO 11898)。
三、工作原理CAN总线采用分布式控制的工作原理。
在CAN总线中,各个设备通过总线进行通信,每个设备之间都可以相互发送和接收信息。
CAN总线上的设备一般分为主机和从机,主机负责控制总线的访问,而从机则负责接收和发送数据。
CAN总线使用CSMA/CA(Carrier Sense Multiple Access / Collision Avoidance)协议进行数据传输。
每个设备在发送数据前会检测总线上的信号,如果发现总线上正在传输数据,则等待一段时间再发送,以避免冲突。
四、应用领域CAN总线技术在工业控制系统中得到了广泛的应用。
它可以连接各种传感器、执行器和计算机,用于控制和监测工业过程。
由于CAN总线具有高可靠性和实时性,广泛应用于汽车电子系统,如发动机控制、底盘控制、空调控制等。
此外,CAN总线技术还被用于船舶、飞机、火车和军事装备等领域。
它在这些领域中起到了连接和协调各个设备的作用。
五、未来发展随着物联网和工业4.0等概念的兴起,对于实时性和可靠性要求更高的通信技术逐渐被提出。
CAN总线技术在这方面有着不可替代的优势,因此其未来发展前景广阔。
未来CAN总线技术可能在以下几个方面得到进一步发展。
首先,更高的通信速率是一个主要的发展方向。
目前CAN总线的通信速率一般在1Mbps到10Mbps之间,但随着数据量和通信速率的不断增加,CAN总线需要适应更高速的通信需求。
can总线的原理及应用实例
CAN总线的原理及应用实例1. 什么是CAN总线?CAN(Controller Area Network)总线是一种常用于在电子设备之间进行通讯的串行总线系统。
它最早由德国博世公司开发,并于1986年开始应用于汽车电子领域。
CAN总线具有高可靠性、高传输速率和广泛的应用领域等特点,在汽车、工业自动化、机器人技术等领域得到了广泛的应用。
2. CAN总线的原理CAN总线采用了一种分布式通讯的方式,即所有设备共享同一条总线进行通讯。
CAN总线系统由多个节点组成,每个节点都有一个唯一的标识符。
节点之间通过总线进行数据的传输。
在CAN总线中,使用了一种冲突检测与回避的机制来解决多个节点同时发送数据时可能出现的冲突问题。
当多个节点同时发送数据时,会发生冲突。
CAN总线会检测到冲突并自动进行回避,以保证数据传输的可靠性。
CAN总线采用了差分传输的方式,通过两根线(CAN_H和CAN_L)来传输数据。
CAN_H和CAN_L线分别代表高电平和低电平,通过比较CAN_H和CAN_L之间的电平差异来判断传输的数据是0还是1。
3. CAN总线的应用实例3.1 汽车电子系统CAN总线在汽车电子系统中得到了广泛的应用。
汽车中的各种电子控制单元(ECU)通过CAN总线进行通讯,实现各个系统之间的数据传输和互联。
例如,发动机控制单元、制动系统控制单元、空调系统控制单元等都通过CAN总线进行通讯,实现整车各个系统的协调工作。
3.2 工业自动化在工业自动化领域,CAN总线也被广泛应用。
工业设备中的各个控制单元通过CAN总线进行通讯,实现对整个生产过程的控制和监测。
例如,机械臂控制单元、传感器控制单元、PLC等设备都可以通过CAN总线进行互联,实现自动化生产。
3.3 机器人技术CAN总线在机器人技术中的应用也非常广泛。
机器人系统中的各个模块通过CAN总线进行通讯,实现机器人的控制和操作。
例如,机器人的运动控制模块、传感器模块、视觉系统等都可以通过CAN总线进行互联,实现机器人的智能化操作。
现场总线综述及应用实例
现场总线综述及应用实例现场总线技术综述一.概述现场总线控制系统技术就是20世纪80年代中期在国际上发展出来的一种崭新的工业控制技术。
现场总线控制系统(fcs)的出现引起了传统的plc和dcs控制系统基本结构的革命性变化。
现场总线系统技术极大地简化了传统控制系统繁琐且技术含量较低的布线工作量,使其系统检测和控制单元的分布更趋合理。
更重要的是从原来的面向设备选择控制和通信设备转变成为基于网络选择设备。
尤其是20世纪90年代现场总线控制系统技术逐渐进入中国以来,结合internet和intranet的迅猛发展,现场总线控制系统技术越来越显示出其传统控制系统无可替代的优越性。
现场总线控制系统技术已成为工业控制领域中的一个热点。
1.现场总线的特点现场总线技术实际上是采用串行数据传输和连接方式代替传统的并联信号传输和相连接方式的方法,它依次同时实现了掌控层和现场总线设备层之间的数据传输,同时在确保传输实时性的情况下同时实现信息的可靠性和开放性。
通常的现场总线具备以下几个特点:(1)布线直观(2)开放性(3)实时性(4)可靠性2.现场总线的优点由于现场总线以上的特点,特别就是现场总线系统结构的精简,并使控制系统的设计,加装,投运至正常生产运转以及检修保护,都彰显出来优越性。
1.节省硬件数量与投资,2.节省加装费用3.节省保护开支4.用户具有高度的系统集成主动权5.提高了系统的准确性与可靠性3.现场总线的应用领域目前现场总线技术的应用主要集中在冶金、电力、水处理、乳品饮料、烟草、水泥、石化、矿山以及oem用户等各个行业,同时除了道路无人监控、楼宇自动化、智能家居等新技术领域。
二.现场总线的标准1.iec61158的制订1984年iec提出现场总线国际标准的草案。
1993年才通过了物理层的标准iec1158-2,并且在数据链路层的投票过程中几经反复。
发展61158现场总线的本意是“排他的和联合的”,各自独立的“现场总线”将给用户增添许多棘手的技术问题,牺牲生命的就是用户的利益。
现场总线技术文献总结

现场总线技术文献总结《现场总线技术文献总结》的范文,篇一:现场总线技术文献综述《现场总线技术》论文题目:论文类型:姓名: 学号: 班级: 论文现场总线技术文献综述文献综述20XX 年 6 月 6 日摘要现场总线(Fieldbus)是指开放式、国际标准化、数字化、相互交换操作的双向传送、连接智能仪表和控制系统的通信网络。
它作为工厂数字通信网络的基础?沟通了生产过程现场及控制设备之间及其与更高控制管理层次之间的联系。
它不仅是一个基层网络?而且还是一种开放式、新型全分布控制系统。
这是一项以智能传感、控制、计算机、数字通讯等技术为主要内容的综合技术?是信息化带动工业化和工业化推动信息化的适用技术?是能应用于各种计算机控制领域的工业总线?因现场总线潜在着巨大的商机?世界范围内的各大公司投入相当大的人力、物力、财力来进行开发研究。
当今现场总线技术一直是国际上各大公司激烈竞争的领域?由于现场总线技术的不断创新?过程控制系统由第四代的 DCS发展至今的 FCS(Fieldbus Control System)系统?已被称为第五代过程控制系统。
而 FCS 和 DCS 的真别在于其现场总线技术。
现总线技术以数字信号取代模拟信号?在 3C(puter 计算机、Control 控、mcenication 通信)技术的基础上?大量现场检测与控制信息就地采集、就地处理、就地使用?范文TOP100许多控制功能从控制室移至现场设备。
由于国际上各大公司在现场总线技术这一领域的竞争?仍未形成一个统一的标准?目前现场总线网络互联都是遵守 OSI 参考模型。
由于现场总线以计算机、微电子、网络通讯技术为基础?这一技术正在从根本上改变控制系统的理念和方法?将极大地推动整个工业领域的技术进步?对工业自动化系统的影响将是积极和深远的。
关键字?CAN总线、LonWorks总线、FF总线AbstractFieldbus (Fieldbus) refers to open,international standardization,digital and mutual exchange operations two-way transmission,connecting intelligent instrument and control system of munication work.It as plant digital munication work,the basis of the production process munication between field and the control equipment with higher control management level and the contact between.It s not only a grass-roots work,but also a kind of open,new whole distribution control system.This is anintelligent sensing,control,puter,digital munication technology as the main contents of the prehensive technology,isbeing an information based society impetus industrialization and the industrialization push the applicable technology,information can be applied to various puter control areas of industrial bus,because of fieldbus potential great opportunities,the worldwide each big panies invest considerable human,material ndfinancial resources to develop research .Today's Fieldbus technology has been international panies petitivefield,because of Fieldbus technology unceasing innovation,process Control System consists of the fourth generation since the DCS development of Fieldbus Control System (FCS) System,has been called the fifth generation process Control System .But the real difference of DCS and FCS in the fieldbus technology.Now bus technology replaced with digital signal analog signals in 3C (puter Control Control,puter,mcenication munication) technology,and on the basis of field test and Control information of in situ Set,in situ treatment and on-the-spot use,many control functions from the control roommoved to site equipment.The big pany becauseinternational in the fieldbus technology this field of petition,still not form an unified standards,currently fieldbus work interconnection abide by the OSI reference model .Because of fieldbus to puters,microelectronics,work munication technology as thefoundation,this technology are fundamentally change control system concepts and methods,will greatly promote the whole industry to progress of technology,industrial automation system,the effect will be positive and far-reaching.Key word: thecan bus,LonWorks fieldbus,FF bus现场总线是安装在生产过程区域的现场设备/仪表与控制室内的自动控制装置/系统之间的一种串行数字式多点双向通信的数据总线。
现场总线CAN原理与应用技术综述报告

现场总线CAN综述报告CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。
此后,CAN 通过ISO11898及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
一. CAN总线的产生与发展控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
控制器局部网将在我国迅速普及推广。
随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。
由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。
这类系统是以微型机为核心,将 5C 技术--COMPUTER(计算机技术)、CONTROL(自动控制技术)、COMMUNICATION(通信技术)、CRT(显示技术)和 CHANGE(转换技术)紧密结合的产物。
CAN总线原理与技术应用
CAN总线原理与技术应用CAN总线是一种串行通信协议,用于在电子设备之间传输数据。
它的全称是Controller Area Network,即控制器局域网络。
CAN总线最初是由德国的Bosch公司在1986年提出的,用于解决汽车电子系统之间大量数据通信的需要。
随后,CAN总线技术逐渐在其他领域得到推广应用,如工业控制、航空航天、医疗设备等。
CAN总线的特点是高速、实时和可靠。
它采用了串行通信方式,能够以较高的速度传输数据,通常可以达到1Mbps以上的数据传输速率。
此外,CAN总线可以实现实时通信,对于时间敏感的应用非常适用。
同时,CAN总线的通信是双向的,能够实现多个节点之间的通信,并且具有冗余性和错误检测机制,保证了系统的可靠性。
CAN总线的工作原理是基于主从结构和多点通信的方式。
在一个CAN网络中,通常会有一个主控器(主机)和多个从控器(从机),它们之间可以进行双向通信。
数据传输时,主控器负责发送数据帧,从控器负责接收并响应。
CAN总线使用标准的消息帧格式来传输数据,包括数据、控制和错误检测字段。
CAN总线的技术应用非常广泛。
在汽车电子系统中,CAN总线被广泛应用于发动机管理系统、制动系统、空调系统等各种控制单元之间的通信。
通过CAN总线,这些控制单元可以实时地交换信息,从而实现汽车系统的协同工作。
在工业控制领域,CAN总线可以用于各种工厂自动化设备之间的通信,实现生产过程的监控和控制。
此外,CAN总线还可以应用于智能家居、医疗设备、航空航天等领域,为各种电子设备提供可靠的通信方式。
除了标准的CAN总线协议外,还有一些衍生的CAN总线技术,如CAN FD(Flexible Data-Rate)、CANopen等。
CAN FD是在标准CAN总线的基础上增加了数据传输速率和数据帧长度的扩展,可以更好地适用于一些高速、大容量的应用场景。
CANopen是一种针对工业控制领域的高层协议,它建立在CAN总线的基础上,提供了更加完善的通信功能和网络管理能力。
现场总线技术大报告-CAN总线智能节点

现场总线技术报告CAN总线智能节点班级:机03A-1学号:8888姓名:尚亦鹏概述近年来工业测控系统从传统的集中测量控制系统转向网络化的集散控制系统。
随着现场总线技术高速发展和标准化程度的不断提高,以现场总线技术为基础的开放型集散测控系统得到广泛应用。
总线式控制器局域网(controller area network,CAN)属于现场总线范畴,是一种能有效支持分布式控制的串行通信网络,可将挂接在现场总线上作为网络节点的智能设备连接成网络系统,并进一步构成集散测控系统。
CAN智能节点位于传感器和执行机构所在的现场,在集散控制系统中起着承上启下的作用。
一方面,它必须和上位机进行通信,以完成数据交换;另一方面,它根据系统的需要以完成测量与控制的功能。
因此,CAN智能节点的设计在工业集散测控系统中有着十分重要的作用。
本技术报告将介绍一种基于ARM处理器STM32F107和CAN收发器CTM8251构建的CAN智能节点的设计方案。
一、CAN 智能节点硬件设计图1:CAN 总线智能节点硬件电路原理图图2:CTM8251与CAN控制器间的电路连接图3:CTM8251网络拓扑结构图CAN收发器CTM8251芯片采用全灌封工艺,内部集成CAN-bus 所必须的收发电路,完全电气隔离电路,隔离电压(DC2500V)。
CTM8251是用于CAN控制器与CAN总线之间的接口芯片。
支持标准波特率:5kbps—1Mbps 。
该芯片是用于CAN控制器与CAN 总线之间的接口芯片,具有将CAN控制器逻辑电平转换为CAN总线的差动电平的功能,另外CTM8251还具有对CAN控制器与CAN总线之间的隔离作用。
在同一个CAN- bus 网络中,最多可连接110 个CTM8251。
ARM处理器STM32F107是意法半导体推出全新STM32互连型(Connectivity)系列微控制器中的一款性能较强产品,此芯片集成了各种高性能工业标准接口,其中就带有两路CAN2.0B接口,故可用作于CAN控制器,用于CAN节点的数据的接受和发送。
CAN总线综述及其应用实例
c m u e n d t i . D r n h x e i e t t e f u t i f t e s g a s s m a e , t e e a a o y s g a i o l c e y t e m d l n h n o p t r i e a 1 u i g t e e p r m n , h o n a n o h i n l i i ul t d h m n t r i n l s c l e t db h o u e a dt e s n t h o p t r e t o t e c m u e .Th c m ut r c r y u h r g a a n o n o t e v l e a l s he e u t o l e r d e o p e a r o t t e p o r m t ki g c u t f h a u , t a t t r s l c u d b e . K y w r s C N b , t e t c n q e o t e C N b s d t r n m s i n , s l B s c C , d s r b t d m n t r y t m e o d A us h eh iu f h A u , aat as is o Vi ua a i , A N i t i u e o i o s s e
应 用 技 术
I ■
Caiedc l i h e hoRe isnaTngew nccneoyv
C N总线综述及 其应用实例 A
李 婷
秦 皇岛 060) 604 ( 山大学 电子实验 中心 燕
[ 要] 摘 本文 介绍 了 C N总线 的基本 知识, 其技术 指标进 行 了叙述, A 对 并介绍 了一个 基于 CN总线 的应用 . A 采用 V 语 言编程 , 用 CN现场 总线技术 以及 华 B 利 A 控 R M智能模 块搭 建分 布式监 控系 统 的逻辑 结构, 用 C N . S 采 A 20通讯 协议 实现上 位机 与模块 的数据 通信 。详细 介绍 了 R M 4隔离 型脉冲输 入计 数器模 块与上 位 S0 计 算机 的连 接与 通讯 实现 。在 实验 过程 中模 拟 了信 号发 生源 , 发 出的信 号经 模块采 集 后送 至上 位机 . 行计 数值 程序 后, 以读取 计数 结果 。 其 执 可
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现场总线CAN综述报告CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。
此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
一. CAN总线的产生与发展控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
控制器局部网将在我国迅速普及推广。
随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。
由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。
这类系统是以微型机为核心,将 5C 技术--COMPUTER(计算机技术)、CONTROL(自动控制技术)、COMMUNICATION(通信技术)、CRT(显示技术)和 CHANGE(转换技术)紧密结合的产物。
它在适应范围、可扩展性、可维护性以及抗故障能力等方面,较之分散型仪表控制系统和集中型计算机控制系统都具有明显的优越性。
典型的分散式控制系统由现场设备、接口与计算设备以及通信设备组成。
现场总线(FIELDBUS)能同时满足过程控制和制造业自动化的需要,因而现场总线已成为工业数据总线领域中最为活跃的一个领域。
现场总线的研究与应用已成为工业数据总线领域的热点。
尽管目前对现场总线的研究尚未能提出一个完善的标准,但现场总线的高性能价格比将吸引众多工业控制系统采用。
同时,正由于现场总线的标准尚未统一,也使得现场总线的应用得以不拘一格地发挥,并将为现场总线的完善提供更加丰富的依据。
控制器局部网 CAN正是在这种背景下应运而生的。
由于CAN为愈来愈多不同领域采用和推广,导致要求各种应用领域通信报文的标准化。
为此,1991 年 9 月 PHILIPS SEMICONDUCTORS 制订并发布了 CAN 技术规范(VERSION2.0)。
该技术规范包括A和B 两部分。
2.0A给出了曾在CAN 技术规范版本1.2 中定义的CAN报文格式,而2.0B给出了标准的和扩展的两种报文格式。
此后,1993 年11 月ISO正式颁布了道路交通运载工具--数字信息交换--高速通信控制器局部网(CAN)国际标准(ISO11898),为控制器局部网标准化、规范化推广铺平了道路。
二. CAN总线特点CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1MBPS。
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。
采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识码可由11 位或29 位二进制数组成,因此可以定义211或229 个不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。
数据段长度最多为8 个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。
同时,8 个字节不会占用总线时间过长,从而保证了通信的实时性。
CAN协议采用CRC 检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
CAN卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已公认为最有前途的现场总线之一。
另外,CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。
CAN总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之间实现自由通信。
CAN总线协议已被国际标准化组织认证,技术比较成熟,控制的芯片已经商品化,性价比高,特别适用于分布式测控系统之间的数通讯。
CAN总线插卡可以任意插在PC AT XT兼容机上,方便地构成分布式监控系统。
三. CAN 总线技术介绍3.1位仲裁要对数据进行实时处理,就必须将数据快速传送,这就要求数据的物理传输通路有较高的速度。
在几个站同时需要发送数据时,要求快速地进行总线分配。
实时处理通过网络交换的紧急数据有较大的不同。
一个快速变化的物理量,如汽车引擎负载,将比类似汽车引擎温度这样相对变化较慢的物理量更频繁地传送数据并要求更短的延时。
CAN 总线以报文为单位进行数据传送,报文的优先级结合在11 位标识符中,具有最低二进制数的标识符有最高的优先级。
这种优先级一旦在系统设计时被确立后就不能再被更改。
总线读取中的冲突可通过位仲裁解决。
当几个站同时发送报文时,站1 的报文标识符为011111;站2 的报文标识符为0100110;站3 的报文标识符为0100111。
所有标识符都有相同的两位01,直到第3 位进行比较时,站1 的报文被丢掉,因为它的第3 位为高,而其它两个站的报文第3 位为低。
站2 和站3 报文的4、5、6 位相同,直到第7 位时,站3 的报文才被丢失。
注意,总线中的信号持续跟踪最后获得总线读取权的站的报文。
在此例中,站2 的报文被跟踪。
这种非破坏性位仲裁方法的优点在于,在网络最终确定哪一个站的报文被传送以前,报文的起始部分已经在网络上传送了。
所有未获得总线读取权的站都成为具有最高优先权报文的接收站,并且不会在总线再次空闲前发送报文。
CAN具有较高的效率是因为总线仅仅被那些请求总线悬而未决的站利用,这些请求是根据报文在整个系统中的重要性按顺序处理的。
这种方法在网络负载较重时有很多优点,因为总线读取的优先级已被按顺序放在每个报文中了,这可以保证在实时系统中较低的个体隐伏时间。
对于主站的可靠性,由于CAN 协议执行非集中化总线控制,所有主要通信,包括总线读取(许可)控制,在系统中分几次完成。
这是实现有较高可靠性的通信系统的唯一方法3.2 CAN 与其它通信方案的比较在实践中,有两种重要的总线分配方法:按时间表分配和按需要分配。
在第一种方法中 ,不管每个节点是否申请总线,都对每个节点按最大期间分配。
由此,总线可被分配给每个站并且是唯一的站,而不论其是立即进行总线存取或在一特定时间进行总线存取。
这将保证在总线存取时有明确的总线分配。
在第二种方法中,总线按传送数据的基本要求分配给一个站 ,总线系统按站希望的传送分配(如:Ethernet CSMA/CD)。
因此,当多个站同时请求总线存取时,总线将终止所有站的请求,这时将不会有任何一个站获得总线分配。
为了分配总线,多于一个总线存取是必要的。
CAN实现总线分配的方法,可保证当不同的站申请总线存取时,明确地进行总线分配。
这种位仲裁的方法可以解决当两个站同时发送数据时产生的碰撞问题。
不同于Ethernet 网络的消息仲裁,CAN 的非破坏性解决总线存取冲突的方法,确保在不传送有用消息时总线不被占用。
甚至当总线在重负载情况下,以消息内容为优先的总线存取也被证明是一种有效的系统。
虽然总线的传输能力不足,所有未解决的传输请求都按重要性顺序来处理。
在CSMA/CD 这样的网络中,如Ethernet,系统往往由于过载而崩溃,而这种情况在CAN中不会发生。
3.3 CAN 的报文格式在总线中传送的报文,每帧由7 部分组成,见图3。
CAN协议支持两种报文格式,其唯一的不同是标识符(ID)长度不同,标准格式为11 位,扩展格式为29 位。
在标准格式中,报文的起始位称为帧起始(SOF),然后是由11 位标识符和远程发送请求位(RTR)组成的仲裁场。
RTR 位标明是数据帧还是请求帧,在请求帧中没有数据字节。
控制场包括标识符扩展位(IDE),指出是标准格式还是扩展格式。
它还包括一个保留位 (ro),为将来扩展使用。
它的最后四个字节用来指明数据场中数据的长度(DLC)。
数据场范围为0~8 个字节,其后有一个检测数据错误的循环冗余检查(CRC)。
应答场(ACK)包括应答位和应答分隔符。
发送站发送的这两位均为隐性电平(逻辑1),这时正确接收报文的接收站发送主控电平(逻辑0)覆盖它。
用这种方法,发送站可以保证网络中至少有一个站能正确接收到报文。
报文的尾部由帧结束标出。
在相邻的两条报文间有一很短的间隔位,如果这时没有站进行总线存取,总线将处于空闲状态。
3.4 数据错误检测不同于其它总线,CAN 协议不能使用应答信息。
事实上,它可以将发生的任何错误用信号发出。
CAN协议可使用五种检查错误的方法,其中前三种为基于报文内容检查。
3.4.1 循环冗余检查(CRC)在一帧报文中加入冗余检查位可保证报文正确。
接收站通过CRC 可判断报文是否有错。
3.4.2 帧检查这种方法通过位场检查帧的格式和大小来确定报文的正确性,用于检查格式上的错误。
3.4.3.应答错误如前所述,被接收到的帧由接收站通过明确的应答来确认。
如果发送站未收到应答,那么表明接收站发现帧中有错误,也就是说,ACK场已损坏或网络中的报文无站接收。
CAN协议也可通过位检查的方法探测错误。
3.4.4 总线检测有时,CAN 中的一个节点可监测自己发出的信号。
因此,发送报文的站可以观测总线电平并探测发送位和接收位的差异。
3.4.5 位填充一帧报文中的每一位都由不归零码表示,可保证位编码的最大效率。
然而,如果在一帧报文中有太多相同电平的位,就有可能失去同步。
为保证同步,同步沿用位填充产生。
在五个生。
在五个连续相等位后,发送站自动插入一个与之互补的补码位;接收时,这个填充位被自动丢掉。