测速程序
霍尔元件测速原理说明及应用

1
霍尔传感器是对磁敏感的传感元件;常用于开关信号采集的有CS3020、CS3040等;这种传感器是一个3端器件;外形与三极管相似;只要接上电源、地;即可工作;输出通常是集电极开路OC门输出;工作电压范围宽;使用非常方便..如图1所示是CS3020的外形图;将有字面对准自己;三根引脚从左向右分别是Vcc;地;输出..
uint data z;counter;//定义无符号整型全局变量lk
//====================================================
void initvoid//定义名为init的初始化子函数
{ //init子函数开始;分别赋值
TMOD=0X51; //GATE C/T M1 M0 GATE C/T M1 M0 计数器T1 定时器T0
void displayvoid //数码管显示
{
P1=LKz/1000;P2=LK10;delay10;
P1=LKz/100%10;P2=LK11;delay10;
P1=LKz%100/10;P2=LK12;delay10;
P1=LKz%10;P2=LK13;delay10;
}
//=========================================
// 0 1 0 1 0 0 0 1
TH1=0; //计数器初始值
TL1=0;
测速显示C程序

#include <REG52.H>#define uchar unsigned char#define uint unsigned int#define ulong unsigned longuchar a,b,c,d;#define LED_DAT P0sbit pin_SpeedSenser = P3^5; //速度传感器脉冲信号输出端接在T1上#define TIME_CYLC 100 //12M晶振,定时器10ms 中断一次我们1秒计算一次转速,1000ms/10ms = 100#define PLUS_PER 2 //码盘的齿数,这里假定码盘上有2个齿,即传感器检测到2个脉冲,认为1圈#define K 1.0 //校准系数sbit zhen1=P1^0;sbit fan1=P1^1;sbit en1=P1^2;uchar code loops[] = {0x7f,0xbf,0xdf,0xef}; //定义显示位控制驱动码uchar code table[]={0x14,0xd7,0x4c,0x45,0x87,0x25,0x24,0x57,0x04,0x05}; // 0,1,2,3,4,5,6,7,8,9uint Tcounter = 0; //时间计数器bit Flag_Fresh = 0; // 刷新标志bit Flag_clac = 0; //计算转速标志bit Flag_Err = 0; //超量程标志//在数码管上显示一个四位数void DisplayFresh();//计算转速,并把结果放入数码管缓冲区void ClacSpeed();//初始化定时器void init_timer();//延时函数void Delay(uint ms);void it_timer0() interrupt 1 //定时器0中断的响应函数{TF0 = 0; //定时器T0用于数码管的动态刷新TH0 = 0xD8; //初始化TL0 = 0xF0;Flag_Fresh = 1;Tcounter++;if(Tcounter>TIME_CYLC){Flag_clac = 1;//周期到,该重新计算转速了}}void it_timer1() interrupt 3 //中断地址是0x001b{TF1 = 0; //定时器T1用于单位时间内收到的脉冲数,要速度不是很快,T1永远不会益处Flag_Err = 1; //如果速度很高,我们应考虑另外一种测速方法:脉冲宽度算转速}void main(void){init_timer();while(1){zhen1=1;fan1=0;en1=1;Delay(31);en1=0;Delay(169);if(Flag_Fresh){Flag_Fresh = 0;DisplayFresh(); // 定时刷新数码管显示}if(Flag_clac){Flag_clac = 0;ClacSpeed(); //计算转速,并把结果放入数码管缓冲区Tcounter = 0;//周期定时清零TH1=TL1 = 0x00;//脉冲计数清零}if(Flag_Err) //超量程处理{//数码管显示字母'EEEE',开机时初始化为0000a = 0x2c;b = 0x2c;c = 0x2c;d = 0x2c;while(1){DisplayFresh();//不再测速等待复位i}}}}//在数码管上显示一个四位数void DisplayFresh(){P2 =loops[0] ;LED_DAT = table[a];Delay(20);P2 =loops[1] ;LED_DAT = table[b];Delay(20);P2 =loops[2] ;LED_DAT = table[c];Delay(20);P2 =loops[3] ;LED_DAT = table[d];Delay(20);}//计算转速,并把结果放入数码管缓冲区void ClacSpeed(){uint speed ;ulong PlusCounter;PlusCounter = TH1*256 + TL1;speed = K*(PlusCounter/PLUS_PER);//K是校准系数,如速度不准,调节K的大小a = (speed/1000)%10;b = (speed/100)%10;c = (speed/10)%10;d = speed%10;}void init_timer() //初始化{TMOD = 0x51; //定时10毫秒,TOT1选择软件门方式1,T0定时,T1计数,96页可查TH0 = 0xD8; //T0初始化TL0 = 0xF0;ET0=1; //T0中断允许EA=1; //T0中断TR0=1; //TO运行TH1 = 0x00; //T1初始化TL1 = 0x00;ET1=1; //T1中断允许TR1=1; //T1运行zhen1=1;fan1=0;}void Delay(uint ms) //延时0.1ms函数{uchar x,y;for(x=ms;x>0;x--)for(y=11;y>0;y--);}。
简单测速程序

/*实现功能:电机测速使用芯片:AT89S52 或者STC89C52 或AT89S51 STC89C51晶振:12MHZ#include <reg52.h>#define uchar unsigned char#define uint unsigned int//==============LCD1602接口连接方法=====================/*-----------------------------------------------------|DB0-----P0.0 | DB4-----P0.4 | RW-------P2.3 ||DB1-----P0.1 | DB5-----P0.5 | RS-------P2.4 ||DB2-----P0.2 | DB6-----P0.6 | E--------P2.2 ||DB3-----P0.3 | DB7-----P0.7 |---------------------------------------------------*///================================================*/#define LCM_Data P0 //LCD1602数据接口#define Busy 0x80 //用于检测LCM状态字中的Busy标识sbit LCM_RW = P2^3; //读写控制输入端,LCD1602的第五脚sbit LCM_RS = P2^4; //寄存器选择输入端,LCD1602的第四脚sbit LCM_E = P2^2; //使能信号输入端,LCD1602的第6脚//=================计数传感模块连接=====================/*-----------------------------------------------------|VCC-----VCC | GND-----GND | OUT-------P3.2---------------------------------------------------*/sbit OUT=P3^2;//**************函数声明***************************************void WriteDataLCM (uchar WDLCM);//LCD模块写数据void WriteCommandLCM (uchar WCLCM,BuysC); //LCD模块写指令uchar ReadStatusLCM(void);//读LCD模块的忙标void DisplayOneChar(uchar X,uchar Y,uchar ASCII);//在第X+1行的第Y+1位置显示一个字符void LCMInit(void);//LCD初始void DelayMs(uint Ms);//1MS基准延时程序uint total,zhuansu;uchar t0_count;#define canshu=2;//参数,如果电机转一圈,计数器检测到几次,这里的参数就要相应修改//***********************主程序******************************main(){TMOD=0x01;//定时器T0为定时器工作方式1TCON=01;//设定外部中断0为边沿触发方式TH0=0X3C;TL0=0XB0;//设定定时器TO为50MSTR0=1;//启动定时器T0ET0=1;EA=1;//开启外部中断LCMInit();//LCD初始total=20;t0_count=0;OUT=1;DisplayOneChar(0, 0,'T');//显示:TDisplayOneChar(0, 1,':');//显示::DisplayOneChar(0, 2, zhuansu/1000+0x30);//显示十位数据DisplayOneChar(0, 3, zhuansu/100%10+0x30);//显示个位数据DisplayOneChar(0, 4,zhuansu/10%10+0x30);//DisplayOneChar(0, 5, zhuansu%10+0x30); //显示百位数据EX0=1;//允许外部中断0while(1){DisplayOneChar(0, 0,'T');//显示:TDisplayOneChar(0, 1,':');//显示::DisplayOneChar(0, 2, zhuansu/1000+0x30);//显示十位数据DisplayOneChar(0, 3, zhuansu/100%10+0x30);//显示个位数据DisplayOneChar(0, 4,zhuansu/10%10+0x30);//DisplayOneChar(0, 5, zhuansu%10+0x30); //显示百位数据DisplayOneChar(1, 0,'C');//显示:TDisplayOneChar(1, 1,':');//显示::DisplayOneChar(1, 2, total/1000+0x30);//显示十位数据DisplayOneChar(1, 3, total/100%10+0x30);//显示个位数据DisplayOneChar(1, 4,total/10%10+0x30);//DisplayOneChar(1, 5, total%10+0x30); //显示百位数据}}//****外部中0中断入口void ex0_in() interrupt 0{total++;}//***************定时器T0中断void t0_int() interrupt 1{TH0=0X3C;TL0=0XB0;//重新装载定时T0t0_count++;if(t0_count==20)//中断20次为1秒{t0_count=0;zhuansu=total/canshu;total=0;}}/*======================================================================LCM初始化======================================================================*/void LCMInit(void){LCM_Data = 0;WriteCommandLCM(0x38,0); //三次显示模式设置,不检测忙信号DelayMs(5);WriteCommandLCM(0x38,0);DelayMs(5);WriteCommandLCM(0x38,0);DelayMs(5);WriteCommandLCM(0x38,1); //显示模式设置,开始要求每次检测忙信号WriteCommandLCM(0x08,1); //关闭显示WriteCommandLCM(0x01,1); //显示清屏WriteCommandLCM(0x06,1); // 显示光标移动设置WriteCommandLCM(0x0C,1); // 显示开及光标设置[;.DelayMs(100);}//==============================LCD1602显示子程序================================================// 写数据函数: E =高脉冲RS=1 RW=0//======================================================================*/void WriteDataLCM(uchar WDLCM){ReadStatusLCM(); //检测忙LCM_Data = WDLCM;LCM_RS = 1;LCM_RW = 0;LCM_E = 0; //若晶振速度太高可以在这后加小的延时LCM_E = 0; //延时LCM_E = 1;}/*====================================================================写指令函数: E=高脉冲RS=0 RW=0======================================================================*/void WriteCommandLCM(uchar WCLCM,BuysC) //BuysC为0时忽略忙检测{if (BuysC) ReadStatusLCM(); //根据需要检测忙LCM_Data = WCLCM;LCM_RS = 0;LCM_RW = 0;LCM_E = 0;LCM_E = 0;LCM_E = 1;}/*==================================================================== 正常读写操作之前必须检测LCD控制器状态:E=1 RS=0 RW=1;DB7: 0 LCD控制器空闲,1 LCD控制器忙。
单片机51测速程序

//实例100:电机转速表设计#include<reg51.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚sbit E=P2^2; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚unsigned char code digit[ ]={"0123456789"}; //定义字符数组显示数字unsigned int v; //储存电机转速unsigned char count; //储存定时器T0中断次数bit flag; //计满1秒钟标志位/*****************************************************函数功能:延时1ms(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒***************************************************/void delay1ms(){unsigned char i,j;for(i=0;i<10;i++)for(j=0;j<33;j++);}/*****************************************************函数功能:延时若干毫秒入口参数:n***************************************************/void delay(unsigned char n){unsigned char i;for(i=0;i<n;i++)delay1ms();}/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
编码器测速的三菱plc程序
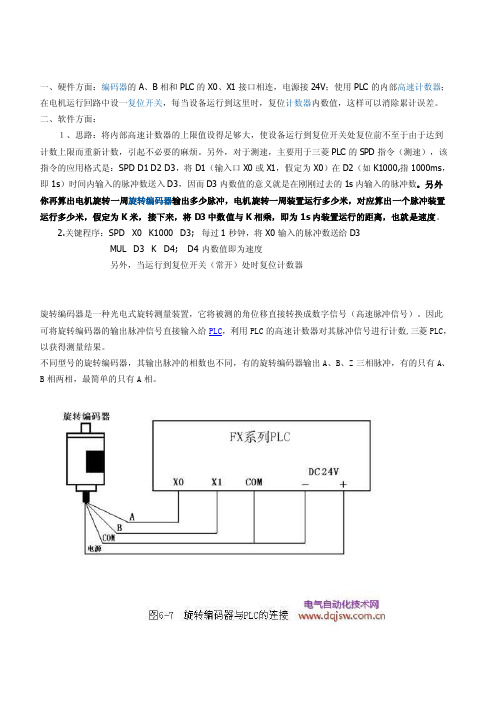
一、硬件方面:编码器的A、B相和PLC的X0、X1接口相连,电源接24V;使用PLC的内部高速计数器;在电机运行回路中设一复位开关,每当设备运行到这里时,复位计数器内数值,这样可以消除累计误差。
二、软件方面:1、思路:将内部高速计数器的上限值设得足够大,使设备运行到复位开关处复位前不至于由于达到计数上限而重新计数,引起不必要的麻烦。
另外,对于测速,主要用于三菱PLC的SPD指令(测速),该指令的应用格式是:SPD D1 D2 D3,将D1(输入口X0或X1,假定为X0)在D2(如K1000,指1000ms,即1s)时间内输入的脉冲数送入D3,因而D3内数值的意义就是在刚刚过去的1s内输入的脉冲数。
另外你再算出电机旋转一周旋转编码器输出多少脉冲,电机旋转一周装置运行多少米,对应算出一个脉冲装置运行多少米,假定为K米,接下来,将D3中数值与K相乘,即为1s内装置运行的距离,也就是速度。
2.关键程序:SPD X0 K1000 D3; 每过1秒钟,将X0输入的脉冲数送给D3MUL D3 K D4; D4内数值即为速度另外,当运行到复位开关(常开)处时复位计数器旋转编码器是一种光电式旋转测量装置,它将被测的角位移直接转换成数字信号(高速脉冲信号)。
因此可将旋转编码器的输出脉冲信号直接输入给PLC,利用PLC的高速计数器对其脉冲信号进行计数,三菱PLC,以获得测量结果。
不同型号的旋转编码器,其输出脉冲的相数也不同,有的旋转编码器输出A、B、Z三相脉冲,有的只有A、B相两相,最简单的只有A相。
如图所示是输出两相脉冲的旋转编码器与FX2N系列PLC的连接示意图。
编码器有4条引线,其中2条是脉冲输出线,1条是COM端线,1条是电源线。
编码器的电源可以是外接电源,也可直接使用PLC的DC24V电源。
电源“-”端要与编码器的COM端连接,“+ ”与编码器的电源端连接。
编码器的COM端与PLC输入COM端连接,A、B两相脉冲输出线直接与PLC的输入端连接,连接时要注意PLC 输入的响应时间。
测速,路程,时间显示子程序

//printstr(2, 5, 1,tab_num1,2); //速度
//printstr(3, 5, 1,tab_num1,4); //运行时间
//Speed1+=0;
void Disp_time(void)
{
//uchar PassTime1=0x30;
//uchar PassTime2=0x30;
//uchar PassTime3=0x30;
//uchar PassTime4=0x30;
if ((int)PassTime*100<100) //时间未够1s
//DisplaySingleChar(0x08,1,Speed3);
}
}
//====================显示路程=============================//
void Disp_Distance(void)
{
//uchar Distance1=0x30;
// DisplaySingleChar(0x05,1,PassTime2);
// DisplaySingleChar(0x06,1,'.');
// DisplaySingleChar(0x07,1,PassTime3);
// DisplaySingleChar(0x08,1,PassTime4);
//*****************全局变量定义********************//
float Speed=0.0; //速度寄存变量
float Distance=0.0; //距离寄存变量
霍尔传感器测速原理图和程序

LM393管脚图实现功能:此版配套测试程序使用芯片:AT89S52晶振:波特率:9600编译环境:Keil作者:zhangxinchunleo网站:淘宝店:汇诚科技声明此程序仅用于学习与参考,引用请注明版权和作者信息//说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平/include<> //库文件define uchar unsigned char//宏定义无符号字符型define uint unsigned int //宏定义无符号整型/I/O定义/sbit LED=P1^0; //定义单片机P1口的第1位即为指示端sbit DOUT=P2^0; //定义单片机P2口的第1位即为传感器的输入端/延时函数/void delay//延时程序{uchar m,n,s;form=20;m>0;m--forn=20;n>0;n--fors=248;s>0;s--;}/主函数/void main{while1 //无限循环{LED=1; //熄灭口灯ifDOUT==0//当浓度高于设定值时,执行条件函数{delay;//延时抗干扰ifDOUT==0//确定浓度高于设定值时,执行条件函数{LED=0; //点亮口灯}}}}/汇诚科技实现功能:0~9999计数器使用芯片:AT89S52晶振:波特率:9600编译环境:Keil作者:zhangxinchunleo网站:淘宝店:汇诚科技声明此程序仅用于学习与参考,引用请注明版权和作者信息/include <>define uchar unsigned chardefine uint unsigned intuchar duan10={0xc0,0Xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //所需的段的位码//uchar wei4={0XEf,0XDf,0XBf,0X7f}; //位的控制端开发板uchar wei4={0X80,0X40,0X20,0X10}; //位的控制端仿真uint z,x,c,v, date; //定义数据类型uint dispcount=0;/延时函数/void delayuchar t{uchar i,j;fori=0;i<t;i++{forj=13;j>0;j--;{ ;}}}/数码管动态扫描/void xianshi{/数据转换/z=date/1000; //求千位x=date%1000/100; //求百位c=date%100/10; //求十位v=date%10; //求个位P2=wei0;P0=duanz;delay50;P2=wei1;P0=duanx;delay50;P2=wei2;P0=duanc;delay50;P2=wei3;P0=duanv;delay50;}/中断函数/void ExtInt0 interrupt 0 //中断服务程序{dispcount++; //每按一次中断按键,计数加一if dispcount==9999 //计数范围0-9999 {dispcount=0;}}/主函数/void main{TCON=0x01; //中断设置IE=0x81;while1{date=dispcount;xianshi;}}。
M法T法测速单片机程序设计

M法、T法测速单片机程序设计摘要本设计为M法、T法测速的单片机程序设计。
使用STC89C52单片机作为控制器,使用该单片机的外部中断和定时器对编码器的输出的脉冲进行采样来计算出电机的转速。
可以使用按键输入来调整M法、T法测速法中Z、Tc和Tt等参数以及测速方法的选择,以此来增强本设计的适应性。
参数选择结果和电机转速计算结果均显示在LCD1602上。
关键字:STC89C52,M法、T法测速,LCD1602,电机转速ⅠAbstractThis design as m, t-law velocity measurement of single-chip computer programming. Using STC89C52 single-chip computer as the controller, using the microcontroller's external interrupts and timers for encoder output pulse is sampled to calculate the speed of the motor. Can be adjusted using touchtone m, t law Velocimetry parameters such as z, Tt and Tc, as well as in speed measurement method of choice, as a way to enhance the adaptability of this design. Parameter selection and calculation of motor speed results are available on LCD1602.Keywords:STC89C52,M、T method, the LCD1602, Motor speedⅡ目录第1章绪论 (1)1.1 旋转编码器 (1)1.2 数字测速的精度指标 (2)1.2.1 分辨率 (2)1.2.2 测速误差率 (2)1.3 M法测速 (2)1.4 T法测速 (3)第2章硬件系统设计 (5)2.1 STC89C52介绍 (5)2.2硬件电路 (6)2.3.1时钟电路 (6)2.3.2 显示电路 (7)2.3.3 速度检测电路 (7)2.3.4 按键输入电路 (8)第3章系统软件设计 (9)3.1 主程序设计 (9)3.1 M法测速程序设计 (10)3.2 T法测速程序设计 (11)总结 (12)参考文献 (13)附录A 系统原理图 (14)附录B 主要C语言源程序 (15)Ⅲ第1章绪论1.1旋转编码器旋转编码器是用来测量转速的装置,光电式旋转编码器通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(REP)。
移动网络测速3篇

移动网络测速第一篇:测速软件介绍移动网络测速是指测量移动网络速度的过程。
在现今高速互联网的年代,准确地测量移动网络速度是十分重要的。
移动网络测速不仅能够帮助用户了解其网络性能,还能提供网络质量信息给网络提供商,这有助于网络提供商改善和优化网络性能。
这篇文章将介绍一些常见的移动网络测速软件。
1. Speedtest by OoklaSpeedtest by Ookla 是最受欢迎的移动网络测速软件之一。
该软件可以测量移动网络的下载速度、上传速度和延迟速度。
它提供一个简单的测试过程,用户只需点击“开始测试”按钮即可。
测试完成后,软件将显示下载速度、上传速度和延迟速度的结果。
该软件还提供详细的网络速度报告和数据分析,用户可以通过多次测试来追踪网络性能的变化。
2. Network MasterNetwork Master 是一款功能强大的移动网络测速软件。
它不仅可以测量网络速度,还可以检测网络安全性和提高网络性能。
该软件可以测量下载速度、上传速度、延迟速度和网络质量。
它还提供了网络带宽监视器、Wi-Fi检测器和Wi-Fi优化器等功能。
3. MeteorMeteor 是一款专门为移动网络设计的测速软件。
它可以测量移动网络的下载速度、上传速度和延迟速度。
与其他测速软件不同的是,Meteor 可以模拟在各种网络条件下浏览网页、播放视频和运行应用程序的体验。
这可以帮助用户了解其网络的实际性能。
4. FastFast 是一款简单易用的移动网络测速软件。
它可以测量下载速度、上传速度、延迟速度和网络质量。
Fast 还提供了测量地理位置的功能,用户可以看到不同地区的网络速度。
Fast 的一个特别之处是它的社交功能,用户可以将其网络速度测试结果发布到社交媒体上。
以上是一些常见的移动网络测速软件。
尽管这些软件有些细微差异,它们的基本功能都很相似。
例如,它们都可以测量下载速度、上传速度和延迟速度。
因此,用户可以根据自己的喜好来选择最适合自己的测速软件。
手机实时测网速咋看懂
手机实时测网速咋看懂简介在如今飞速发展的互联网时代,我们对于网速的要求也越来越高。
尤其对于手机用户来说,网速的稳定与快速直接影响到他们的上网体验。
因此,手机上实时测网速成为一项非常重要的功能。
但是,很多人不知道如何正确的看懂这些测速结果。
本文将介绍如何利用手机进行实时测网速,并且解读这些数据结果,帮助大家更好的了解自己的网络状态。
实时测网速工具在手机上进行实时测网速,需要借助一些专门的应用程序。
市面上有很多种测速工具,如Speedtest、Fast、爱测速等。
这些工具可以快速测量当前网络的带宽、延迟和丢包率等指标,从而帮助用户了解网络的实际状况。
如何进行测速1.下载和安装一个可信赖的测速应用程序,例如 Speedtest。
2.打开应用程序,点击“开始测速”按钮。
3.应用程序会自动选择合适的服务器进行测速,测速过程可能需要一定时间。
4.测速完成后,应用程序会显示测试结果,包括下载速度、上传速度、延迟等数据指标。
测速结果解读下载速度下载速度指的是从互联网下载数据时的速度,通常以 Mbps(兆位每秒)为单位。
下载速度越快,表示您可以更快地加载网页、下载文件或观看视频等。
上传速度上传速度指的是向互联网上传数据时的速度,也通常以 Mbps为单位。
较快的上传速度可以更快地上传文件到云端存储、发送邮件附件等。
延迟(Ping)延迟(Ping)是数据包从您的设备发送到互联网服务器并返回所用的时间,通常以毫秒(ms)为单位。
延迟越低,表示与服务器之间的通信更快速响应。
丢包率丢包率是指在数据传输过程中丢失的数据包的比例,通常以百分比表示。
丢包率较低表示网络稳定,用户可以更流畅地体验网络服务。
如何优化网络速度1.尽量保持手机处于较为开阔或信号良好的地方,避免在信号较弱的环境中使用网络。
2.关闭手机后台运行的消耗网络的应用程序。
3.定期清理手机缓存,保持设备的运行流畅。
4.考虑使用VPN等能提升网络速度的工具。
总结通过实时测网速,我们可以及时了解手机网络的实际状态,并调整网络使用的习惯和环境,让上网体验更加顺畅。
流动测速仪使用规章制度
流动测速仪使用规章制度第一条总则为了加强道路交通管理,保障道路交通安全,提高道路通行效率,依据《中华人民共和国道路交通安全法》、《中华人民共和国道路交通安全法实施条例》等法律法规,制定本规章制度。
第二条流动测速仪的定义本规章制度所称流动测速仪,是指用于检测机动车在道路上行驶速度的便携式、移动式测速设备。
第三条流动测速仪的使用范围流动测速仪主要用于以下范围:(一)交通事故多发路段;(二)道路交通安全隐患路段;(三)城市快速路、高速公路等主要道路;(四)其他需要进行测速的路段。
第四条流动测速仪的使用条件(一)使用流动测速仪的部门应当具备相关资质,并经过专业培训;(二)流动测速仪应当符合国家规定的技术标准;(三)流动测速仪应当定期进行检定,确保检测数据的准确性;(四)在使用流动测速仪之前,应当向公众发布测速信息,设置测速警告标志。
第五条流动测速仪的使用程序(一)使用流动测速仪的部门应当在规定的路段进行测速,并遵守以下程序:1. 在测速点前方500米至1000米处设置测速警告标志;2. 开启流动测速仪,进行测速;3. 对超速行驶的机动车进行拍照、录像等证据收集;4. 及时撤离测速现场,并将测速数据上传至相关部门。
(二)使用流动测速仪的部门应当对测速数据进行审核,确保数据的准确性和合法性;(三)对超速行驶的机动车,依法进行处罚;(四)对不服处罚的当事人,依法进行听证、行政复议或者提起行政诉讼。
第六条流动测速仪的使用要求(一)使用流动测速仪的部门应当遵守国家法律法规,不得滥用流动测速仪;(二)流动测速仪应当放置在道路开阔、明显的位置,不得影响交通安全;(三)流动测速仪的使用人员应当具备相关专业知识,不得擅自调整流动测速仪的参数;(四)流动测速仪的使用过程中,如遇到仪器故障或者数据异常,应当立即停止使用,并上报相关部门处理。
第七条违规行为的处理(一)违反本规章制度,滥用流动测速仪的,由上级部门责令改正,并对直接负责的主管人员和其他直接责任人员依法给予处分;(二)违反本规章制度,未按照规定设置测速警告标志的,由上级部门责令改正,并可以对使用流动测速仪的部门处以罚款;(三)违反本规章制度,使用的流动测速仪不符合国家规定的技术标准的,由上级部门责令改正,并可以对使用流动测速仪的部门处以罚款;(四)违反本规章制度,使用流动测速仪的人员未经过专业培训的,由上级部门责令改正,并可以对使用流动测速仪的部门处以罚款。
旋转编码器测速300plc程序

旋转编码器测速300plc程序摘要:一、旋转编码器测速简介1.旋转编码器的概念与原理2.旋转编码器在工业自动化领域的应用二、300PLC 程序设计1.PLC 的基本概念与原理2.300PLC 的硬件系统与软件系统3.旋转编码器测速程序设计思路三、旋转编码器测速程序实现1.旋转编码器的接线与参数配置2.测速程序的编写与调试3.程序的运行与结果分析四、旋转编码器测速程序的应用1.在工业自动化生产线上的实际应用2.提高生产效率与产品质量3.对未来工业自动化的影响与展望正文:一、旋转编码器测速简介旋转编码器是一种光电式传感器,通过测量旋转物体的角度或速度,将其转化为数字信号输出。
在工业自动化领域,旋转编码器被广泛应用于各种旋转设备的监测与控制,如电机、齿轮箱、伺服系统等,具有高精度、高可靠性、抗干扰能力强等优点。
二、300PLC 程序设计1.PLC 的基本概念与原理可编程逻辑控制器(Programmable Logic Controller,PLC)是一种用于自动化控制和工业过程控制的数字化控制系统。
PLC 通过编写程序,对输入信号进行逻辑处理,然后输出控制信号,实现对设备的自动控制。
2.300PLC 的硬件系统与软件系统300PLC 是一种通用的PLC 产品,具有强大的硬件和软件系统。
硬件系统包括中央处理器、输入/输出模块、通信模块等;软件系统包括编程软件、操作界面等。
3.旋转编码器测速程序设计思路旋转编码器测速程序的设计主要分为三部分:旋转编码器的接线与参数配置、测速程序的编写与调试、程序的运行与结果分析。
在设计过程中,需要根据旋转编码器的类型、接口、参数等,编写相应的程序,实现对旋转编码器信号的采集、处理和输出。
三、旋转编码器测速程序实现1.旋转编码器的接线与参数配置首先,需要根据旋转编码器的类型和接口,正确接线。
然后,对旋转编码器的参数进行配置,如光电开关的数量、脉冲数、旋转方向等。
2.测速程序的编写与调试在程序编写阶段,需要根据旋转编码器的信号特点和处理需求,编写相应的程序。
如何在电脑上测试网速
如何在电脑上测试网速网速一般是指电脑或手机上网时,上传和下载数据时,请求和返回数据所用的时间长短,而还有很多小伙伴不知道怎么在电脑上测试网速,下面就由店铺跟大家分享具体的操作方法吧,希望对大家有所帮助~在电脑上测试网速的步骤网页测速在百度搜索框键入【网速】关键词,单击【搜索】按钮,会出现一个在线测试网速的应用,单击【开始测试】进入【注:网址不能发,以图片方式显示】网站,选择您所处于的线路即可测如果您的宽带是电信网速,那么直接去电信公司给客户提供的自助测速平台。
【/】命令测速法1 以Windows 7系统为例:先打开命令提示符程序。
1、【开始】——【所有程序】——【附件】——【命令提示符】2、按快捷键【WIN+R】打开【运行】命令框,键入命令【cmd】,按回车键或单击【确定】按钮打开2 命令使用方式:ping空格网址(这里可以是网址的ip或游戏服务器的ip)空格-t,如【ping -t】,按回车键回显结果。
如图中标示,时间越短说明网速越快,这里的ms单位是毫秒的意思。
注:某些服务器为了安全是禁止ping的,此时就会出现ping不通(Request timed out)的现象。
另外要ping游戏服务器的IP,就要到游戏所在文件夹里面的一个ini或txt后缀的文件。
软件测速法以迅雷下载软件为例:用迅雷下载一个大容量的资源,然后观察它的下载速率。
1M带宽为100KB左右2M带宽为200kb左右3M带宽为300kb左右以此类推。
如果数值过小的话,那么您的网速就不太正常了。
以P2P终结者为例:运行【P2P终结者】程序,单击【网速测试】功能选择测试方式:这里有两种方式1、网页版测速2、软件版测速另外还有很多工具软件有测试网速的功能,比如360 宽带测速、金山卫士网速测试等。
5g测速网速
5G测速网速在当今数字化时代,互联网已经成为我们生活中不可或缺的一部分,而网络速度的快慢也直接影响着我们的网络体验。
随着5G技术的广泛部署,人们对于5G网络速度的期待也愈发高涨。
本文将介绍5G网络的测速方法和网速表现,以及对比4G网络的差异性。
5G网络的测速方法想要测试5G网络的网速,我们可以选择多种方法:1.使用速度测试软件:市面上有许多专门用于测试网络速度的应用程序,如SpeedTest、Fast等,通过这些软件可以直观地看到当前的上行和下行速度,以及ping延迟等数据。
2.网站测速:一些网站也提供在线测速功能,用户可以直接在浏览器中输入网址进行测速。
3.运营商官方应用:各个运营商通常也会提供官方应用,用户可以通过这些应用测试当前的网络速度。
5G网络速度表现5G网络的网速表现主要体现在以下几个方面:1.下载速度:5G网络的最大特点之一就是其极高的下载速度,理论上可以达到几Gbps的速度,十分适合高清视频、大型文件的下载需求。
2.上传速度:与下载速度一样,5G网络的上传速度也有显著提升,可以更快地上传大型文件或者进行视频直播等操作。
3.低延迟:5G网络的另一个优势是其低延迟性能,即网络数据传输延迟更低,使得在线游戏、视频通话等实时性要求较高的应用能够更流畅地运行。
5G与4G的速度对比相比4G网络,5G网络在网速表现上有着明显的提升:1.下载速度:5G网络的下载速度远远超过4G网络,完全可以满足更多高带宽需求的用户,例如高清视频、AR/VR应用等。
2.上传速度:5G网络的上传速度也明显快于4G网络,对需求频繁上传大数据的用户来说尤为重要。
3.低延迟:5G网络的低延迟特点给在线游戏、远程协作、自动驾驶等领域带来了更大的发展空间,4G网络无法与之相提并论。
需要注意的是,5G网络速度的表现受到诸多因素的影响,例如网络覆盖范围、基站密度、网络设备性能等,因此在实际使用过程中可能会有一定的波动。
结语综上所述,5G网络的高速度、低延迟等特点为我们的网络体验带来了质的提升,使得更多领域的创新应用成为可能。
速度的测量
速度的测量
速度是物体在单位时间内所通过的位移。
测量速度的方法有多种。
本文将介绍几种常见的测量速度的方法。
1. 定点测速
定点测速是最常见的测量速度的方法之一。
它适用于在固定的
位置测量物体的速度。
这种方法需要使用计时器和测量距离的工具。
步骤:
- 在起点和终点之间设置一个已知距离。
- 使用计时器记录物体通过该距离所需的时间。
- 通过将已知距离除以所记录的时间,计算出物体的平均速度。
2. 实时测速
实时测速是一种能够即时测量物体速度的方法。
它适用于追踪
物体在一段时间内的运动情况。
这种方法需要使用速度测量仪器。
步骤:
- 将速度测量仪器放置在物体需要经过的位置。
- 程序将根据测量仪器的数据计算出物体的实时速度。
3. 高速相机测速
高速相机测速是一种用于测量高速物体速度的方法。
它适用于需要精确测量物体瞬间速度变化的情况。
这种方法需要使用高速相机。
步骤:
- 将高速相机对准物体即将经过的位置。
- 程序将根据高速相机拍摄到的连续图像计算出物体的瞬间速度。
以上是几种常见的测量速度的方法。
根据实际的测量需求和条件选择合适的方法,可以帮助我们准确测量物体的速度。
上门测速测试的三个基本流程

上门测速测试的三个基本流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!上门测速测试是指网络服务提供商派遣技术人员到用户所在地,使用专业工具对用户的网络连接进行速度测试和评估的过程。
手机网速测试在哪里设置
手机网速测试在哪里设置在如今高速网络日益普及的时代,手机网速已经成为我们生活中不可或缺的一部分。
然而,有时我们会遇到网络速度变慢的情况,这时候就需要进行网速测试,以找出问题的瓶颈所在。
那么,手机网速测试在哪里设置呢?本文将详细介绍不同手机系统下的网速测试设置方法,帮助您轻松找出网络问题并解决。
Android系统在Android系统中,通常有两种方式可以进行网速测试,一种是通过下载第三方应用程序,另一种是通过系统自带的网络测速功能。
通过第三方应用程序进行网速测试1.打开应用商店(如Google Play Store)搜索并下载一个网速测试应用,比如Speedtest、FAST Speed Test等。
2.安装完毕后,打开应用程序,按照提示操作进行网速测试。
3.运行测试后,您将看到您的手机的下载速度、上传速度和延迟等信息。
通过系统自带的网络测速功能1.在Android系统中,通常会有一个名为“网络测速”、“网络检测”或类似的选项,您可以在设置中找到。
2.打开该功能后,系统会自动对您的网络速度进行测试,同时显示测试结果。
3.您可以根据测试结果分析问题所在,以便进一步解决网络问题。
iOS系统在iOS系统中,同样可以通过第三方应用程序或系统自带功能进行网速测试。
通过第三方应用程序进行网速测试1.打开App Store搜索并下载一个网速测试应用,比如Speedtest、FAST Speed Test等。
2.安装完毕后,打开应用程序,按照提示操作进行网速测试。
3.运行测试后,您将看到下载速度、上传速度和延迟等信息。
通过系统自带的网络测速功能1.在iOS系统中,您可以在“设置”中的“蜂窝移动网络”中找到“数据用量”或“网络速度测试”等选项。
2.点击相应选项后,系统会自动对您的网络速度进行测试,同时显示测试结果。
3.根据测试结果调整网络设置,以达到更优的网络使用效果。
总结通过上述介绍,我们了解了在Android和iOS系统下,手机网速测试的设置方法。
旋转编码器测速300plc程序

旋转编码器测速300plc程序【实用版】目录一、旋转编码器的概述二、测速 300plc 程序的原理三、旋转编码器测速 300plc 程序的实现四、程序的优点与局限性正文一、旋转编码器的概述旋转编码器是一种将旋转运动转换为电信号的传感器,广泛应用于工业自动化控制领域。
它通过光电、磁电或电容原理,将旋转运动转换为周期性的电信号,这些信号可以用于测量转速、位置和速度等参数。
旋转编码器具有高分辨率、高精度、抗干扰能力强等特点,因此在工业生产中具有重要的应用价值。
二、测速 300plc 程序的原理测速 300plc 程序是一种基于可编程逻辑控制器(PLC)的测速方法。
它通过编写 PLC 程序,实现对旋转编码器输出信号的采集、处理和计算,从而得到旋转运动速度的实际值。
在测速 300plc 程序中,PLC 作为控制核心,对旋转编码器的输出脉冲进行计数,并根据设定的参数计算出运动速度。
三、旋转编码器测速 300plc 程序的实现1.硬件连接:将旋转编码器的输出信号接入 PLC 的输入端口,根据旋转编码器的信号类型选择合适的输入模块。
同时,将 PLC 的输出端口与驱动设备相连接,实现对旋转运动的控制。
2.编写 PLC 程序:根据旋转编码器的参数和测速要求,编写相应的PLC 程序。
程序中需要实现对旋转编码器输出脉冲的计数、速度计算等功能。
3.调试与优化:将编写好的 PLC 程序下载到 PLC 设备中,并进行实际运行测试。
根据测试结果对程序进行调整和优化,以满足实际测速需求。
四、程序的优点与局限性1.优点:测速 300plc 程序具有较高的测量精度和稳定性,能够满足大多数工业生产场景的需求。
同时,PLC 设备具有较强的抗干扰能力,能够在恶劣的工业环境中正常工作。
2.局限性:测速 300plc 程序受限于 PLC 设备的性能和程序编写者的技术水平。
网络测量中的常用工具和软件推荐(十)

网络测量中的常用工具和软件推荐一、测量网络速度的常用工具网络测量是评估网络质量和性能的重要工作之一,而测量网络速度是其中最常见的任务之一。
下面将介绍几种常用的测量网络速度的工具。
1. SpeedtestSpeedtest是一款非常流行的测速工具,可以用来测试网络的上传和下载速度。
它提供简单易用的界面,只需点击“开始测速”按钮即可完成测速操作。
测速过程中,Speedtest会自动选择最合适的测速服务器进行测试,以准确地反映当前网络速度情况。
测速结果会显示为网络的ping延迟、下载速度和上传速度等指标,帮助用户了解网络连接质量。
2. Ookla SpeedtestOokla Speedtest是Speedtest的官方应用程序,提供了与网页版相同的测速功能。
除了测速功能外,它还可以测试网络的稳定性和丢包率等指标,并提供详细的测速报告。
此外,Ookla Speedtest还具有历史测速记录、网络问题排查等功能,是一款功能强大的测速工具。
3.是由Netflix开发的测速工具,主要用于测试视频流媒体的性能。
它的测速方式与其他工具有所不同,它会尝试下载Netflix服务器上的视频文件,以测量网络的实际下载速度。
提供了测速结果和连接质量评估,同时还可以进行多次测速并显示平均值,对于需要评估网络在观看高清视频时的性能非常实用。
二、测量网络质量的常用软件除了测量网络速度,测量网络质量和性能也是网络测量中重要的任务。
下面将介绍几款常用的测量网络质量的软件。
1. WiresharkWireshark是一款强大的网络协议分析工具,可以捕获和分析网络数据包。
它支持多种操作系统,并提供了用户友好的界面和强大的过滤功能。
通过Wireshark可以深入了解网络数据包的传输过程、协议的使用情况以及网络的负载情况等,对于网络故障排查和性能优化非常有帮助。
2. PingPlotterPingPlotter是一个网络监测和故障排查工具,可以通过连续发送ping请求来测试网络的连通性和延迟情况,并以图形方式展示结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PORTA|=0x0f ;
DDRM=0xff;
}
#pragma CODE_SEG NON_BANKED
void interrupt 9 Timer1_Onput(void)
{
TFLG1_C1F=1;
if(flag==1)
{ TIE_C1I=0;
timeห้องสมุดไป่ตู้0;
y1=y1*2000;
}
///////////PWM初始化////////////
void PWM_Init(void)
{PWME=0x00; // PWW禁止
PWMPRCLK=0x33; // A=B=40M/8=5M时钟预分频
PWMSCLA=3; // SA=A/2/5 =500k时钟分频
PWMSCLB=3; // SB=B/2/5 =500k时钟分频
display(y2);
}
if(flag==0)
{ time=1;
flag++;
}
}
void interrupt 14 Timer6_Onput(void)
{ TFLG1_C6F=1;
}
void interrupt 15 Timer7_Onput(void)
{TFLG1_C7F=1;
}
}
if(data>999)
{
sendbyte(code[data%10]); PORTA&=0xF7; delay0(10); PORTA|=0X0F;//第一位
sendbyte(code[data%100/10]); PORTA&=0xFB; delay0(10); PORTA|=0X0F;//第二位
void Delay1ms(unsigned int us);
void Delay1s(unsigned int us);
unsigned int time=0;
unsigned int y=0;
long y1;
unsigned int y2;
unsigned int k;
unsigned int y3;
}
}
void Delay1ms(unsigned int us)
{
while (us)
{
Delay1us(1000);
--us;
}
}
void Delay1s(unsigned int us)
{
while (us)
{
Delay1ms(1000);
--us;
}
}
//延时函数
void delay0(unsigned int i)
sendbyte(code[data]); PORTA&=0xF7; delay0(10); //PORTA|=0X0F; //第一位
sendbyte(code[data]); PORTA&=0xF7; delay0(10); //PORTA|=0X0F; //第一位
sendbyte(code[data]); PORTA&=0xF7; delay0(10);// PORTA|=0X0F; //第一位
}
///////////串口初始化函数///////
void sic0_pen(void)
{ SCI0BD=156;/*波特率寄存器*/
SCI0CR1=0x00;
SCI0CR2=0x2c;/*控制寄存器*/
SCI1BD=156;/*波特率寄存器*/
SCI1CR1=0x00;
SCI1CR2=0x2c;/*控制寄存器*/
y++;
if(y==2000){y=0;
y1++;
}
}
if( flag==2){ flag=0;TFLG1_C1F=1;
TIE_C1I=1; }
}
}
void Delay1us(unsigned int us)
{
while (us)
{
_asm(nop);_asm(nop);_asm(nop);
--us;
PWMCLK=0xff; //时钟源选择pwm7632选择SB,PWM5410选择SA
PWMPOL=0xff; //极性PWM0~7在周期开始时输出低电平
PWMCAE=0x00; //对齐方式PWM0~7为左对齐方式
PWMPER0=100;//pwm1的周期T=PWMPER0/SA=100/500K=0.2ms=5kHZ
ECT0_Init();
COPCTL=0x00;
COPCTL=0x00;
COPCTL=0x00;
IO_Init();
PWMDTY0=1;
PTH=0x0f;
time=0;
flag=0;
TFLG1_C1F=1;
TIE_C1I=1;
EnableInterrupts;
for(;;) {
if(time==1){
unsigned int y4;
long i=0;
char time_flag=0;
char flag=0;
int a[4]={0};
unsigned char code[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//共阳极段码0123456789
{
sendbyte(code[data%10]); PORTA&=0xF7; delay0(10); PORTA|=0X0F;//第一位
sendbyte(code[data%100/10]); PORTA&=0xFB; delay0(10); PORTA|=0X0F;//第二位
sendbyte(code[data/100]); PORTA&=0XFD; delay0(10); PORTA|=0X0F;//第三位
y1=y1+y;
d=(((float)f)*((float)y1));
d1=(d/((float)1000000));
d1=(((float)1)/d1);
y2=((int)d1);
d=(d1*((float)10));
y3=((int)d);
a[0]=y3/10000;
y3=y3%10000;
a[0]=y3/1000;
void sic0_pen(void);
void PWM_Init(void);
void IO_Init(void);
void delay0(unsigned int i);
void sendbyte(uchar byte);
void display(unsigned int data);
void Delay1us(unsigned int us);
unsigned char gode[10]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};
float f=1.1;
float d;
float d1;
void main(void) {
MCU_Init();
sic0_pen();
PWM_Init();
{
unsigned char h;
while(--i)
for(h=0;h<250;h++);
}
void sendbyte(uchar byte)
{
uchar i;
for(i=0;i<8;i++)
{
PORTA_PA5=0 ;
if(byte&0x80)
PORTA_PA4=1 ;
else
PORTA_PA4=0;
byte=byte<<1;
PORTA_PA5=1;
}
PORTA_PA6=0 ;
PORTA_PA6=1 ;
}
//数码管显示函数
void display(unsigned int data)
{
if(data<10)
{
sendbyte(code[data]); PORTA&=0xF7; delay0(10); //PORTA|=0X0F; //第一位
sendbyte(code[data%10]); PORTA&=0xF7; delay0(10); PORTA|=0X0F;//第一位
sendbyte(code[data/10]); PORTA&=0xFB; delay0(10); PORTA|=0X0F;//第二位
}
if(data<1000&&data>99)
}
if(data<100&&data>9)
{
sendbyte(code[data%10]); PORTA&=0xF7; delay0(10);PORTA|=0X0F;//第一位
sendbyte(code[data/10]); PORTA&=0xFB; delay0(10); PORTA|=0X0F;//第二位
sendbyte(code[data%1000/100]); PORTA&=0XFD; delay0(10); PORTA|=0X0F;//第三位
sendbyte(code[data/1000]); PORTA&=0XFE; delay0(10); PORTA|=0X0F;//第四位
}
}
/////////////////设置主线频率设定///////////
PWMDTY0=0;//占空比
PWME_PWME0=1;
}