航空电子设备 二次雷达及应答机
浅谈二次雷达应答机的S模式在终端区的运用
浅谈二次雷达应答机的S模式在终端区的运用赵魏【摘要】随着国家经济和民航事业的发展,传统的A/C模式的雷达在空中交通管理开始出现了一些列的弊端,业界开始注意到了应答机的S模式。
本文主要就S模式较着传统模式存在的一些优势,以及S模式在空中管制工作的实际运行之中存在的一些问题进行了一下讲述。
期待随着技术的发展和建设的完善,能让空管工作更加顺畅和安全。
【期刊名称】《电子制作》【年(卷),期】2014(000)012【总页数】2页(P50-50,51)【关键词】二次雷达;应答机的S模式【作者】赵魏【作者单位】中国民航华北空中交通管理局终端管制中心 100621【正文语种】中文笔者在华北空管局从事空中交通管制工作多年,北京终端管制区在1997年底实行雷达管制,是当年民航总局“九五”建设规划的重要项目之一,更是中国民航史的一次重大技术革命。
作为雷达管制,前提条件就是雷达识别。
在目前终端区的日常指挥中,二次雷达A/C模式是常规手段。
二次雷达包括机载应答机和地面询问机两部分。
机载应答机有一个应答机编码,这个应答机编码如同航空器的“身份证”应答机编码是四位,由0—7八个数字可选,除特殊意义的编码(视飞行不指定应答机的话调定1200,仪表飞行在给定应答机之前调定2000。
7500是被劫机,7600是通讯失效,7700是飞机遇险)以外,有7的四次幂个编码。
地面询问机通过询问应答机的编码确定航空器的“身份”。
在与空管自动化系统飞行计划分配的应答机编码耦合生成一个雷达标牌反应在雷达屏幕上。
一线的管制员通过这个来确定航空器以及获得航空器的相应飞行数据掌握航空器的飞行动态来对空进行指挥。
但近年来随着国内经济的日新月异的高速发展,飞行流量的与日俱增,尤其是在大面积航班延误过后,应答机代码与之前的飞行计划中的应答机编码出现了重码的现象,使得在日常工作雷达识别开始出现了困难,无法证明航空器的“身份”。
在这种情况下,大家开始关注到了应答机的S模式。
ATC
三、 应答信号
3. 高度码 (-1000~126700ft,每100ft)
D1D2D4A1A2A4B1B2B4C1C2C4 4. 三个特殊编码 7500,7600,7700
四、ATC系统的组成
四、ATC系统的机载设备组成
四、ATC系统机载设备的组成
控制面板
四、ATC系统机载设备的组成
控制面板
• 异步应答干扰 在雷达探测范围内的所有飞机都会产生应 答信号,地面接收机可能收到并非所需的 应答。
• 同步串扰 当两架飞机离地面站有相同的距离时,其 应答信号会同时被地面接收机接收到,而 产生相互干扰。
7.3mode s 系统 DABS---S模式应答机 一、 S模式应答机功用---机载设备
1、具有A/C模式应答机的所有功能
雷达信标系统简化方块图
系统所能提供的信息:
• 飞机的距离与方位信息; • 目标的识别信息,即飞机(军用或民用)
的代码; • 飞机的气压高度信息; • 一些紧急告警信息,如飞机发生紧急故障、
无线电通讯失效或飞机被劫持等。
二、 询问信号
询问信号 模式划分依据图
二、 询问信号—地面发射
1、组成:P1、P2、P3脉冲
到旁瓣询问时,应答机不应答SLS。 • 基本原理是---比较P1 P2脉冲幅度 P1《=P2时,应答机不应答; P1》=P2 6db时,应答机完全应答。
二、 询问信号
二、 询问信号
波瓣 P2波瓣
三、 应答信号
◆ A/C模式应答机 功 用—发射应答信号
报告飞机编码 报告飞机高度 报告 特殊编码
二、离散选址信标系统 DABS
S模式数据字组采用差分相移键控(DPSK)调 制。这种调制方法是用码位中载波信号的不同相 位差值来表示二进制信息“1”和“0”的。在数据 字的每个0.25μs的码位中,如果在一个数据位的 载波相位翻转位置前后载波的相位翻转了180°, 则该数据位就是二进制数“1”;如载波相位在相 位翻转位置处不发生相位变化(相位差为零), 则该数据位就是二进制数“0”。
二次雷达应答机的故障检测与维修
二次雷达应答机的故障检测与维修二次雷达应答机的故障检测和维修是维护雷达系统稳定运行的重要任务。
二次雷达应答机是一种用于地面雷达系统中的设备,用于接收并回应来自雷达的信号,以向雷达系统提供目标的相关信息。
在故障检测过程中,首先需要进行外部检查,确保二次雷达应答机的外观完好无损、电源连接稳定,并检查其附近是否有任何可能干扰设备正常工作的电磁源。
然后,通过使用合适的测试仪器,如频谱分析仪和示波器,检测二次雷达应答机的信号输出是否符合预期。
对于常见的故障,例如无信号输出或信号强度低的情况,可以采用以下步骤进行故障排查。
首先,检查二次雷达应答机的天线连接是否松动或损坏。
天线是接收和发射雷达信号的重要部件。
如果天线连接不良或损坏,会导致信号质量下降或完全无信号输出。
其次,检查二次雷达应答机的电源供应是否稳定。
不稳定的电源供应可能导致设备工作不正常。
可以使用示波器来观察电源输出的稳定性,并检查电源线路上是否存在松动的连接。
此外,还应检查二次雷达应答机的接收信号处理单元是否损坏。
接收信号处理单元负责将接收到的信号转换为数字信号并进行处理。
如果该单元损坏,可能会导致信号质量下降或无信号输出。
可以使用示波器来检查接收信号处理单元的工作状态。
如果以上方法无法解决故障,可能需要进一步检查电路板上的元件,例如继电器、变压器等。
这些元件的损坏可能导致设备无法正常工作。
可以使用万用表等工具来进行电路板上元件的测试,并将损坏的元件替换为新的。
在故障修复过程中,应注意遵循安全操作规程,并确保设备断电后再进行拆卸和更换元件的操作,以避免电击风险。
维修完成后,应进行功能测试和信号质量测试,以确保二次雷达应答机能够正常工作,并输出稳定、准确的信号。
如果测试结果仍然不符合预期,可以考虑更换设备或向专业维修人员寻求帮助。
综上所述,二次雷达应答机的故障检测和维修包括外部检查、信号输出检测、天线连接检查、电源供应稳定性检查、接收信号处理单元检查和电路板元件检查等步骤。
机载二次雷达应答机的研制
电子科技大学硕士学位论文为了求出询问脉冲的频谱特性曲线,编制以下M声T L A B代码对询问脉冲进行仿真,并绘制出频谱特性曲线。
n井200;st印卜0.0000020/n;卜一0.0000010:st印t:0.0000010;帅苛川砂15仪0.0以刃008):汕p1ot(l,2,1),P l ot(t,”,t,zer o s(Si z4t)));ti ti e(,脉宽为0.5林s的矩形脉冲’)st印卜600(沁oo*p沥;卜3000000*P i:steP t:3000000*P i;产0乃仪心阅8*si n C(0.00()0004*t);劝pl ot(l,2,2),Pl ot(仁y,仁zer o s(ai z城t)));ti t i《矩形脉冲对应的频谱.)ylabel(勺.以刃0008*sinc(0.0000()04*t),);xl abel(十二3000()00*Pi~3000000*Pi,);gh d on;图4一l所示为询问矩形脉冲的时域和频域特性曲线。
…’’一犷--一丈丈!!戈..一犷一‘惬黔{{{;………:纂纂___几{{{{{{{{{!!!‘一犷一‘一’’}}}一卜-一徽年年一冬八一秘图4一1矩形脉冲的时域和频域特性曲线矩形脉冲的频谱图中第一个零值点的角频率为竺,取第一个零值点为脉冲的频带宽度。
因为脉冲宽度为0.8脚,所以矩形脉冲的频带宽度为1.25M H z。
如图4一2所示,脉冲宽度为0.8产:的矩形脉冲经射频载波调制后,被搬移到射第四章终端处理模块的设计频频段,以实现远距离无线传输..||J .目:...……图4一2二次雷达的调制原理机载二次雷达应答机在接收询问信号时,接收到的是一个低频询问脉冲序列和高频载波的调制信号,等效于单极性矩形脉冲序列和一个正弦波的相乘.凡,(,)=[艺气g(卜峨)]c os典‘(4礴)式(4·4)中,g (t )是调制信号的时间波形,几为矩形脉冲宽度,矩形脉冲的脉冲宽度为0.8娜,叭为载波频率,a。
二次雷达模拟应答机反射抑制及反射体位置计算
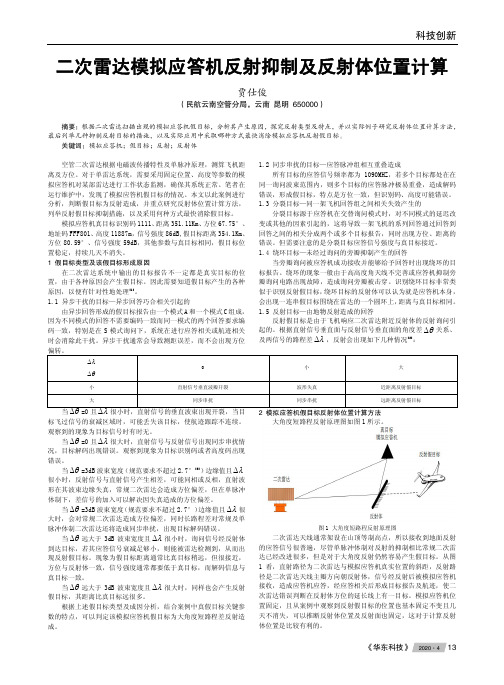
科技创新二次雷达模拟应答机反射抑制及反射体位置计算贾仕俊(民航云南空管分局,云南 昆明 650000)摘要:根据二次雷达扫描出现的模拟应答机假目标,分析其产生原因,探究反射类型及特点,并以实际例子研究反射体位置计算方法,最后列举几种抑制反射目标的措施,以及实际应用中采取哪种方式最快消除模拟应答机反射假目标。
关键词:模拟应答机;假目标;反射;反射体空管二次雷达根据电磁波传播特性及单脉冲原理,测算飞机距离及方位。
对于单雷达系统,需要采用固定位置、高度等参数的模拟应答机对某部雷达进行工作状态监测,确保其系统正常。
笔者在运行维护中,发现了模拟应答机假目标的情况。
本文以此案例进行分析,判断假目标为反射造成,并重点研究反射体位置计算方法,列举反射假目标抑制措施,以及采用何种方式最快消除假目标。
模拟应答机真目标识别码1111、距离351.11Km、方位67.75°、地址码FFF801、高度11887m,信号强度86dB,假目标距离354.1Km、方位80.59°、信号强度59dB,其他参数与真目标相同,假目标位置稳定,持续几天不消失。
1 假目标类型及该假目标形成原因 在二次雷达系统中输出的目标报告不一定都是真实目标的位置,由于各种原因会产生假目标。
因此需要知道假目标产生的各种原因,以便有针对性地处理[1]。
1.1 异步干扰的目标—异步回答巧合相关引起的 由异步回答形成的假目标报告由一个模式A 和一个模式C 组成,因为不同模式的回答不需要编码一致而同一模式的两个回答要求编码一致,特别是在S 模式询问下,系统在进行应答相关或航迹相关时会消除此干扰。
异步干扰通常会导致测距误差,而不会出现方位偏转。
1.2 同步串扰的目标—应答脉冲组相互重叠造成所有目标的应答信号频率都为1090MHZ,若多个目标都处在在同一询问波束范围内,则多个目标的应答脉冲极易重叠,造成解码错误,形成假目标,特点是方位一致,但识别码、高度可能错误。
航空应答机(自动对信号做出回应的电子设备)
应答机
应答机(Transponder),是一部能在收到无线电询问信号时,自动对信号做出回应的电子设备。
在航空应用中,应答机主要作为辅助航空交通管制和机上的空中防撞系统(TCAS)使用。
应答机是由英国空军和美国陆军航空队于第二次世界大战中开发的雷达敌我识别系统中演化而来。
20世纪50年代航空界开始使用二次雷达配合应答机进行通用航空和商用航空的航空管制。
在飞行中,航空管制员会通过无
线电通知飞行员分配给他的应答机代号,比如:“东航5101,应答机0363”,之后飞行员在飞机上手动输入应答机代号0363,之后航空管制员的雷达屏幕上就会正确显示该飞机的身份信息。
浅谈二次雷达与单雷达数据源的航迹跟踪技术
浅谈二次雷达与单雷达数据源的航迹跟踪技术摘要:二次雷达系统不仅能够作为单雷达系统使用,还可以作为终端处理系统接引单雷达数据,保障空域内的航空安全。
本文对二次雷达与单雷达数据源的航迹跟踪技术进行就介绍,主要介绍了航迹关联防范、斜距-高度的校正方法、航迹跟踪方法、单雷达航迹补充跟踪、高度跟踪和实时质量控制6个功能过程。
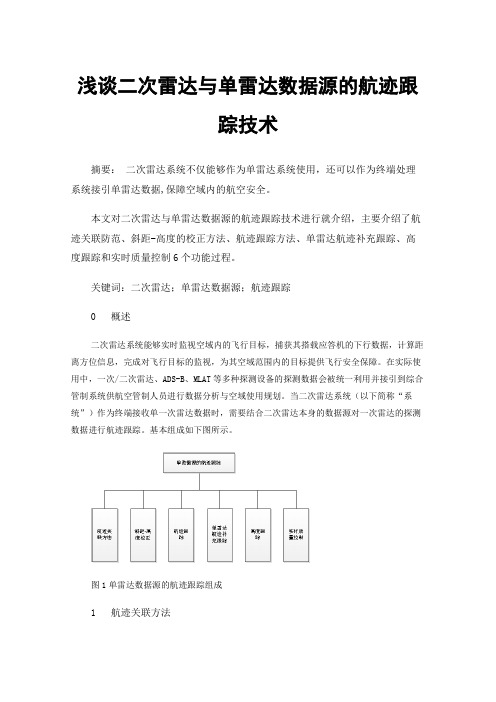
关键词:二次雷达;单雷达数据源;航迹跟踪0 概述二次雷达系统能够实时监视空域内的飞行目标,捕获其搭载应答机的下行数据,计算距离方位信息,完成对飞行目标的监视,为其空域范围内的目标提供飞行安全保障。
在实际使用中,一次/二次雷达、ADS-B、MLAT等多种探测设备的探测数据会被统一利用并接引到综合管制系统供航空管制人员进行数据分析与空域使用规划。
当二次雷达系统(以下简称“系统”)作为终端接收单一次雷达数据时,需要结合二次雷达本身的数据源对一次雷达的探测数据进行航迹跟踪。
基本组成如下图所示。
图1单雷达数据源的航迹跟踪组成1 航迹关联方法当系统接收到新的雷达航迹时,需要进行空间一致性转换。
首先将雷达航迹的位置信息换算为大地坐标系的经度、纬度信息,再使用球面方位投影计算,获取以本系统为原点的笛卡尔坐标信息。
系统航迹和雷达航迹完成了空间统一性转换。
此时可以使用直角坐标系的距离门限判断,当其判断结果在判别波门之内的,则视为关联成功,需要完成各自航迹号的关联与记录。
2 斜距-高度校正雷达站附近仅有少数高空目标才斜距-高度校正需要。
距离雷达站较远及飞行高度低的目标斜距、地距相差很小。
因此,在实用系统中可以使用下述简化近似算法:先把雷达航迹的笛卡尔坐标变换成极坐标,得到目标的斜距r h。
再用简单的正射投影关系:近似计算目标地距r,式中C为目标C模式高度。
此式仅在目标距雷达站距离较近时比较精确,这正是我们所需要的。
得到真正的地距r之后,便可直接按比例r/ r h折算出真正的笛卡尔坐标,使用球面方位反投影方法,获得其对应的经纬度信息,再使用反投影法,得到转换后的笛卡尔坐标,经内插外推后,参加加权平均的数据融合计算。
浅析航管自动化系统中的二次应答机代码与雷达目标关联错误问题

Science &Technology Vision 科技视界二次监视雷达(Secondary Surveillance Radar)广泛用于民用航空空中交通管制领域,为管制员实时提供空中飞机的位置、高度、速度、以及飞机的二次应答机代码。
航管自动化系统通过飞机的二次应答机代码可向管制员提供飞机的航班号、所属航空公司以及该架航班的航路等信息。
这个过程,在航管自动化系统中称为飞行计划与二次应答机代码的关联。
二次监视雷达的工作原理是,地面二次雷达周期性发出询问电脉冲,飞机上的二次雷达应答机收到该询问脉冲后,向地面二次雷达发回一组数据,其中包括飞机的飞行高度、飞行速度和飞机二次应答机代码等信息。
目前飞机的二次应答机代码为一个4位的8进制数(0000-7777),根据国际民航组织(ICAO)的规定,分配给我国可以使用的二次代码为1633个,具体到每一个管制区,如广州区域管制中心,在本情报区内可以使用的二次应答机代码为65个。
随着我国各地机场航班量的快速增长,上述的二次应答机代码数量早已不能满足中国民航的需求,二次应答机代码的重复使用率在目前的航管自动化系统中逐年增加,而由二次应答机代码重码引起的飞机关联错误的问题也呈逐年增加的趋势,这将对飞行安全及管制工作造成一定的影响,下文对该问题危害、出现的原因及解决方法进行详细的分析。
1关联错误对管制员的影响1.1增加管制员的工作量当出现关联错误的问题时,管制员需要进行较繁琐的操作,通过修改飞行计划等措施使航班关联正确。
在由于系统限制等原因无法自动关联时,管制员还需要电话通知所有相关管制单位,塔台管制员甚至还需要电话通知站调取消错误关联航班的起飞报,大大地增加了管制员的工作负荷。
1.2可能带来潜在危险首先,进近、区调管制员对电子进程单的依赖性很强,管制员若不能及时发现航班关联错误有可能导致其掌握的航班信息有误,会造成进近、区调指挥错误,导致出现管制差错。
其次,管制员在进行处理关联错误的操作时,注意力会被分散,削弱其对飞行动态的监控能力,导致管制员工作出现严重的安全隐患。
01-二次雷达原理
二次雷达原理
(单脉冲原理) 单脉冲技术测角的三原则
正北 瞄准轴方向 方位角
:天线瞄准轴指向角
:偏离瞄准轴角度 :偏离瞄准轴方向
二次雷达原理
(单脉冲原理) 单脉冲技术测角的三原则 1。天线瞄准轴指向角 —由天馈系统码盘提供。 2。偏离瞄准轴信息 3。偏离瞄准轴方向 ± —均由单脉冲技术解决。
二次雷达原理
(信号格式) 高度码的解—标准循环码
标准循环码 模2和
0 0 0 1 1 1 1 1 1
0 1 0
8421二进制码
十进制码 累加 500
0 0 0 1 0 1 0 1 0 32 8
2
42 500 21000
二次雷达原理
(信号格式) 高度码的解—五周期码 依照循环码奇偶性查表 查表数值 100英尺 上例循环码偶数位,010代表2 200英尺
(单脉冲原理) 偏离瞄准轴方向 -差信号矢量与和信号矢量是正交的。 -偏离瞄准轴方向不同表现在 90
二次雷达原理
(单脉冲原理) 偏离瞄准轴方向
2 1
1
2
矢量2 矢量1
矢量2 矢量1
1
2
1
2
测角解释
波束中心 1 目标A 目标B
二次雷达原理
(信号格式) 高度码 响应模式C询问回答高度码 码序
D1 D 2 D 4 A1 A2 A4 B1 B 2 B 4
C1 C 2 C 4 五进制码
标准循环码
二次雷达原理
(信号格式) 高度码 -D,A,B共九位是标准循环码,按500英尺 递增。 -C 三位 五周期循环码,按100英尺递增。 -D1代表高度码的最高位。由于民航飞行器目 前达不到这个高度。D1位恒为0。 -高度码最低位代表-1200英尺
二次雷达

二次雷达也叫做空管雷达信标系统(ATCRBS:Air Traffic Control Radar Beaco n System)。
它最初是在空战中为了使雷达分辨出敌我双方的飞机而发展的敌我识别系统,当把这个系统的基本原理和部件经过发展后用于民航的空中交通管制后,就成了二次雷达系统。
管制员从二次雷达上很容易知道飞机的编号、高度、方向等参数,使雷达由监视的工具变为空中管制的手段,二次雷达的出现是空中交通管制的最重大的技术进展,二次雷达要和一次雷达一起工作,它的主天线安装在一次雷达的上方,和一次雷达同步旋转。
二次雷达发射的脉冲是成对的,它的发射频率是1030MHz,接收频率是1 090MHz,发射脉冲由P1、P2、P3脉冲组成,P1、P2脉冲间隔恒为2微秒,P1、P3脉冲间隔决定了二次雷达的模式。
目前民航使用的是两种模式,一种间隔为8微秒,称为A模式又称为3/A模式(识别码);另一种间隔21微秒,称为C模式(高度码)。
接收脉冲由16个脉冲位组成,包含目标的高度,代码等内容。
二次雷达系统的另一重要组成部分是飞机上装的应答机,应答机是一个在接受到相应的信号后能发出不同形式编码信号的无线电收发机,应答机在接收到地面二次雷达发出的询问信号后,进行相应回答。
这些信号被地面的二次雷达天线接收,经过译码,就在一次雷达屏幕出现的显示这架飞机的亮点旁边显示出飞机的识别号码和高度,管制员就会很容易地了解飞机的位置和代号。
为了使管制员在询问飞机的初期就能很快地把屏幕上的光点和所对应的飞机联系起来,机上应答机还具有识别功能,驾驶员在管制员要求时可以按下“识别”键,这时应答机发出一个特别位置识别脉冲(SPI),这个脉冲使地面站屏幕上的亮点变宽,以区别于屏幕上的其他亮点。
20世纪70年代初计算机技术和雷达结合实现了航管雷达的全自动化。
这种系统把一次雷达和二次雷达的数据都输入数据处理系统,高速运转的计算机接收三个方面来的数据,第一是一次雷达的雷达信息,第二是二次雷达来的信标信息,并把它转换成数字码,第三是由航管中心输入的飞行进程数据,即飞行计划的各种数据。
二次雷达应答机的数字信号处理技术研究
二次雷达应答机的数字信号处理技术研究摘要:二次雷达系统是一种广泛应用于民用航空领域的重要设备之一,其数字信号处理技术对于实现高精度目标跟踪、航空器识别和空中交通管理至关重要。
本文以二次雷达应答机的数字信号处理技术为研究对象,探讨了其原理、基本结构以及相关的信号处理算法。
关键词:二次雷达应答机、数字信号处理、目标跟踪、航空器识别、空中交通管理1. 引言二次雷达系统是目前广泛应用于航空领域的一种重要设备。
二次雷达应答机作为系统的核心部件,主要负责接受地面发射的雷达信号、解调和处理信号,并将处理结果返回给雷达系统,用于目标跟踪和航空器识别等任务。
二次雷达应答机的数字信号处理技术直接影响了系统的性能和准确度,因此对其进行研究具有重要意义。
2. 二次雷达应答机的工作原理二次雷达应答机主要由接收机和数字信号处理单元组成。
其工作原理基于雷达发射的信号通过目标反射后,目标上的应答机接收信号并解调,然后将数字信号传递给数字信号处理单元。
数字信号处理单元对接收到的信号进行滤波、去噪、解调和解调拆协议等操作,并将处理好的结果反馈给雷达系统。
3. 二次雷达应答机的基本结构二次雷达应答机的基本结构通常由射频模块、中频模块和数字信号处理模块三部分构成。
射频模块主要负责接收目标反射的高频信号,并通过放大器进行增益,然后将信号传递给中频模块。
中频模块负责对射频信号进行降频处理,以满足后续数字信号处理的要求。
数字信号处理模块是整个应答机的核心部分,它主要包括信号解调、抗噪声处理、数据解析和误码校正等功能。
4. 二次雷达应答机数字信号处理算法研究4.1. 信号解调算法二次雷达应答机接收到的信号经过解调操作后,需要进行信号解调。
传统的解调算法主要采用幅度调制解调和频率调制解调方法,但这些方法对噪声和多径效应敏感,容易导致解调误差。
为了提高信号解调的准确度,近年来出现了一些新的解调算法,如相位平均法、自适应滤波法等,这些算法能够有效降低解调误差,并提高系统的性能。
二次雷达S模式综述
二次雷达S模式综述摘要:在空管领域使用的A/C型二次雷达在一定程度上暴露出许多问题,因此欧美国家开发了S模式二次雷达,它正在逐渐取代传统的A/C模式二次雷达。
本文介绍了S模式的工作机制;在S模式下,询问信号和响应信号的格式、意义;S 模式二次雷达的优势。
关键词:空中交通管制;二次雷达;S模式;应用;综述1.前言随着空中交通流量的增加,传统的A/C模式无法满足空中交通管制(ATC)的要求。
A/C模式的码数只有4096个,容易受到干扰和交叉。
因此,美国林肯实验室进行了先进雷达审讯系统的研究工作,即“DABS”项目;与此同时,英国的研究机构也独立开展了类似的工作,称为“ADSEL”项目。
这两个项目的结果已经合并成一个项目,联邦航空局已经将其命名为S模式。
S模式已被国际民航组织接受为二次监视雷达的行业标准。
2.二次雷达二次雷达(SSR)是相对于一次雷达而言的。
二次雷达发射询问信号,然后接收到应答机的回复信号,地面雷达收到这个信号后,通过信号处理,得到飞机的应答机代码、高度、位置和距离等信息。
民用二次雷达的传统模式为A/C模式,在A/C模式下,二次雷达目标数增加到一定程度时,会暴露出如:缺少回答信号及干扰等问题。
从而使得雷达信号中包含的数据混乱和不确定。
为了满足日益增长的空中交通需求,英国、美国针对二次雷达的问题,研制了S模式雷达和数据通信系统,以提高空中交通管制的能力。
3.S模式空管二次雷达系统工作原理二次雷达的工作模式多种多样,主要是根据编码方式的不同来区分。
现如今,我们都是根据国际的规定来进行划分,目前常用的为A(获取目标航管编号)、C (获取目标气压高度信息)两种模式。
询问格式又叫做上行格式,用UF(UP LINK FORMAT)表示,应答格式又称之为下行格式,用DF(DOWN LINK FORMAT)表示。
下行格式有DF4、DF5、DF11、DF20、DF21、DF24等,其中格式4和5用于上行或下行短消息(56位)监视、高度、识别,20和21用于上行或下行标准长度信息(11位)通信A/B、高度、识别,11用于上行或下行纯S模式全呼叫。
《二次雷达原理》课件
发射机负责将询问信号调制到载 波上,并通过天线发送出去。
03
接收与发射机的性能指标包括动 态范围、灵敏度、抗干扰能力等
。
04
电源与冷却系统
电源与冷却系统是二次雷达 系统中的辅助设备,负责提 供稳定Fra bibliotek电源和保证设备的
正常运行温度。
1
电源设备负责提供稳定的直 流或交流电源,保证设备的
答信号。
应答信号由编码的脉冲组构成 ,包含了飞机的识别信息和位
置信息。
应答机通常安装在飞机的机腹 或机背,通过接收和发送信号 与地面站进行通信。
应答机的性能指标包括应答频 率、脉冲宽度、脉冲重复频率 等。
天线与波束形成
01
02
03
04
天线是二次雷达系统中的重要 组成部分,用于发射和接收无
线电波。
波束形成技术用于控制天线的 方向性,使无线电波能够定向
02
二次雷达系统组成
询问机
询问机是二次雷达系统的 核心组成部分,负责发送 询问信号。
询问机通常安装在地面站 或空中交通管制中心,通 过无线电波与目标进行通 信。
ABCD
询问信号由编码的脉冲组 构成,用于识别目标并获 取其信息。
询问机的性能指标包括询 问频率、脉冲宽度、脉冲 重复频率等。
应答机
应答机是安装在飞机上的设备 ,用于接收询问信号并发送应
正常供电。
冷却系统采用散热器或空调 等设备,对设备进行散热和 温度调节,保证设备的正常 运行温度。
电源与冷却系统的性能指标 包括电源效率和冷却效率等 。
03
二次雷达工作原理
询问与应答信号的产生
询问信号的产生
由雷达发射机产生特定频率的射频信 号,通过天线向空间发射。
详解航管二次雷达ATC识别码和高度询问应答信号
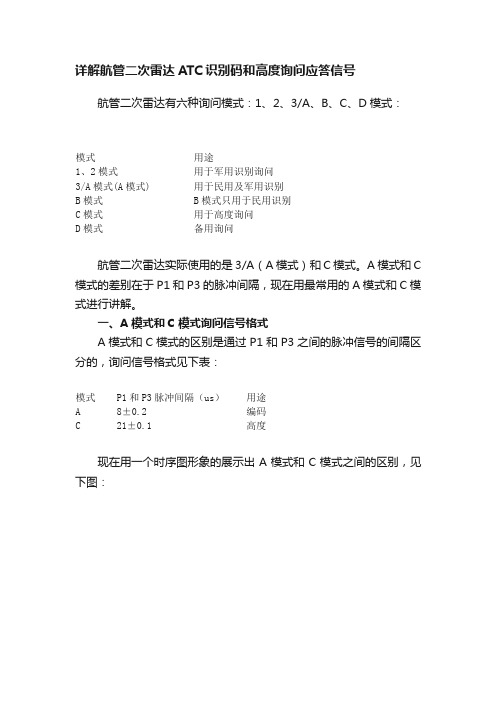
详解航管二次雷达ATC识别码和高度询问应答信号航管二次雷达有六种询问模式:1、2、3/A、B、C、D模式:模式用途1、2模式用于军用识别询问3/A模式(A模式) 用于民用及军用识别B模式B模式只用于民用识别C模式用于高度询问D模式备用询问航管二次雷达实际使用的是3/A(A模式)和C模式。
A模式和C 模式的差别在于P1和P3的脉冲间隔,现在用最常用的A模式和C模式进行讲解。
一、A模式和C模式询问信号格式A模式和C模式的区别是通过P1和P3之间的脉冲信号的间隔区分的,询问信号格式见下表:模式P1和P3脉冲间隔(us)用途A 8±0.2编码C 21±0.1高度现在用一个时序图形象的展示出A模式和C模式之间的区别,见下图:P2脉冲旁瓣脉冲:P2脉冲称为旁瓣抑制脉冲,从航管的全向天线发出,主要是抑制旁瓣方向上应答机的应答,因此称为副瓣抑制脉冲。
当机载应答机收到的P2脉冲幅度超过P1脉冲幅度,则认为收到了地面询问天线的旁瓣方向的信号,将抑制应答。
二、A模式和C模式应答信号格式1. A模式识别应信号:当机载航管设备接收到询问信号又是如何应答的的呢,下面介绍A模式和C模式是怎么发送应答码和高度的。
首先要知道两个发送框架脉冲F1和F2,因为只有地面接收机收到F1和F2两个脉冲时,才会认为是飞机的A/C应答信号,以便解析两个脉冲框架的内容。
机载航管应答机接收到地面航管二次雷达发射的询问信号后,根据询问信号格式(A模式还是C模式),生成相应的应答信号格式。
应答码由16个信息码组成,F1和F2为应答信号发送框架脉冲,两个脉冲间隔为20.3us。
框架脉冲之间有12位信息码,排列顺序为C1、A1、C2、A2、C4、A4、B1、D1、B2、D2、B4、D4,这样就可以组成4096(2^12)个应答码。
X位为备用脉冲位。
SPI为特殊位置识别码,一般时候不用,那什么时候地面需要让飞机开启SPI功能呢?当两架飞机在地面显示器上显示的位置比较接近或则应答码相同,航管人员无法区分时,航管人员可以要求其中一架飞机飞行员按下SPI 按钮,此时会在发射格式中增加一位SPI码(持续时间15s~30s),地面收到SPI码后,在地面显示器上,会将该飞机显示高亮,以便地面人员识别该飞机。
探索电磁环境下民航空管二次雷达系统的安全运行
2020.05科学技术创新探索电磁环境下民航空管二次雷达系统的安全运行郑逸浩(民航汕头空管站技术保障部,广东汕头515000)空管二次雷达系统是保障飞机正常、安全的运行系统,通过实时显示航空动态,管制员及时对航空交通进行管制,指挥飞机安全的飞行与降落。
而交通快速的发展,地铁、高速机场四周的有源干扰设施不断增加,电磁辐射也不断增多,二次雷达系统还受场地环境中的无线电信号的反射和有源信号的干扰。
而电磁辐射不仅干扰民航二次雷达系统的安全运行,还对人员的身体健康有一定的影响,所以需要对电磁环境进行分析研究,针对各方面的建设布局都需要首先考虑到电磁环境,保证机场的雷达系统正常运行与飞机的安全飞行。
1空管雷达系统的概念1.1空管雷达的工作原理空管雷达主要是靠机场的雷达发射机对空间发射电磁波,当目标接收到电磁波后反射相应的回波信号,在机场地面的雷达系统接收到回波信号时,依据电磁波往返时间来计算目标的飞行斜距,通过天线发射的旋转扫描与扇形窄波束同步进行,显示器就能显示出目标的方位与距离。
雷达主要任务就是发现目标与测量目标的参数,并且雷达发射机只需发射一次电磁波就能确定目标方位与距离的电子系统。
当前民航空管雷达有一次监视雷达、二次监视雷达。
一次监视雷达能自动发射电磁波,又称反射式主雷达,在其装置的接收端可检测目标对其电磁波的反射回波,准确判断目标物的位置信息。
电磁发射机接收机、天线信号处理机、雷达显示终端等组成了一次雷达。
在测量时需考虑与监视者间的距离与方位角,但某些一次雷达还能测定目标的相对速度,并且一次雷达不用飞机的配合就可进行监视活动。
1.2空管二次雷达系统分析相比于一次雷达,我国民航监视信号源更多的是来自于二次监视雷达,最初是应用在空战中识别敌我的电子系统。
当前在民航空管中使用的二次雷达系统主要应用于航路监视。
二次雷达需要相应的发射脉冲信号的发射机以及接收机载应答机回答信号的接收机。
当接收到机载应答机返回的信号,二次雷达中的计算机系统再进行处理,获得目标的位置、高度、速度、航向等数据,从而把握飞机航行动态。
这些能力到底是什么意思?

这些能力到底是什么意思?应答机?A模式应答机?C模式应答机?S模式应答机?航空器识别能力?气压高度能力?超长电文?增强监视能力?应答机,又称二次雷达应答机,简称应答机,是飞机上的二次雷达系统设备,通过脉冲信号与地面二次雷达联络,广泛用于空中交通管制,使空中交通管制员实时地得知空中飞机的位置、高度、速度、并通过分配给飞机的SSR代码得知飞机的航班号、所属航空公司等。
一般大型飞机上都装有二次雷达应答机。
A模式、C模式都是二次雷达监视的要求,二次监视雷达地面站通过向航空器发出询问,并接收航空器的应答信息,从而确定航空器与地面站之间的距离和方位。
机载应答机安装一个固定延迟器,在此期间完成解码和应答。
A/C模式应答器根据询问信号提供识别码(A 模式)和气压高度(C 模式)代码,A 模式识别码为4 位八进制数,由空中交通管制系统分配后机组成员输入应答器,C 模式气压高度为机载气压高度值。
S 模式通过24 字节地址确定飞机的位置,同时获取其他信息,如空速、航向、地速、航迹角等,并支持A/C 模式的所有功能与之兼容。
二次监视雷达主要包括A/C模式二次监视雷达和S 模式二次监视雷达。
广播式自动相关监视是航空器、机场活动区车辆和其他物体通过数据链以广播模式自动发出或者接收诸民用航空监视技术应用政策如标识、位置和其他应用数据的一种监视技术。
机载广播式自动相关监视应用功能可分为发送(OUT)和接收(IN),广播式自动相关监视的OUT和IN的功能都是基于数据链通信技术。
目前,国际上广播式自动相关监视技术可选的数据链技术有1090兆赫扩展电文(1090 ES)、通用访问收发机(UAT)、模式4甚高频数据链(VDL MODE 4)等,我国采用1090兆赫扩展电文(1090 ES)。
近年,在民航管制空域活动的航空器应安装机载应答机。
按照全国ADS-B 实施推进计划,2019 年之前,在已实现广播式自动相关监视覆盖的航路、航线、机场内运行的航空器,应具备ADS-B OUT 功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Civil Aviation Flight University of China 3
Aircrafts that are equipped with transponders receive these interrogations and send back a reply (using the 1090 MHz band).
There are two primary types of interrogations; Mode A and Mode C.
Ground Radar Display
Civil Aviation Flight University of China 5
Radar Antenna
NBAA 2003
Mode A/C XPDR
Ground Radar Display
Transmitter Receiver
6
NBAA 2003
Secondary Radar and Transponder
ATCRBS
NBAA 2003
The ATCRBS system is an interrogation-based system that is comprised of a ground-based interrogator and an on-plane transponder.
Civil Aviation Flight University of China 2
Secondary Radar and Transponder
NBAA 2003
For civilian aircraft, the original secondary radar system derived from the early military IFF(Identification Friend or Foe) is called the Air Traffic Control Radar Beacon System, or ATCRBS.
On the ground, an ATCRBS sensor sends out an interrogation signal (using the 1030 MHz frequency band) from a rotating antenna to aircraft flying in its sector.
NBAA 2003
Air traffic control assumes great importance in civil aviation. Ground controllers need to talk frequency with the pilots flying in the controlled area.
Transmitter Receiver
8
NBAA 2003
9
Secondary Radar and Transponder
Interrogations
NBAA 2003
ATCRBS interrogations consist of three pulses. Two of these pulses constitute the interrogation while a third pulse is added to prevent the transponder from replying to the side of the interrogator antenna from one of the side lobes. This pulse is called the side lobe suppression pulse, SLS.
Civil Aviation Flight University of China 4
Secondary Radar and Transponder
Transponder
NBAA 2003
Interrogation (1030MHz)
Secondary Surveillance Radar Antenna
They communicate with each other using VHF and HF communication systems.
At the same time, the controllers also need to monitor the positions and travellings of airplanes flying within the controlled area.
Secondary Radar and Transponder
NBAA 2003
Secondary Radar and Transponder
二次雷达及应答机
Civil Aviation Flight University of China 1
Secondary Radar and Transponder
Radar Antenna
Ground Radar Display
Transmitter Receiver
7
Interrogation Radar Antenna
Plane AltituNBdAeA 2003 Plane Identification Reply
Ground Radar Display
This is realized with the primary surveillance radar (PSR) and the secondary surveillance radar system (SSR). PSR and SSR form the air traffic control radar surveillance system.
Primary Surveillance Radar Antenna
Side ply (Plane Identification or Altitude,1090MHz)
ATC Radar Transmitter Receiver
Figure 6.1