Simulink及基于模型设计的嵌入式应用_孙忠潇(1)讲解
Simulink及基于模型设计的嵌入式应用_孙忠潇
20
Copyright 2014 FUJITSU LIMITED
基于模型的嵌入式设计及应用
代码自动生成
初次尝试,先使用ert.tlc作为系统目标文件生成嵌入式C代码 ert.tlc会启动代码生成过程,将模块转化为C代码 未经过任何优化的代码可读性不强
21
Copyright 2014 FUJITSU LIMITED组件之一,它提 供一个动态系统建模、仿真和综合分析的集成环境。
@Matlab2013b:simulink opens the Simulink® Library
Browser.
@Hyowinner:Simulink = Simu + Link Simu -> Simulation ->仿真 ->具象化逻辑及结果 Link -> 连接 ->模块与库连接 ->设计与需求连接
17
Copyright 2014 FUJITSU LIMITED
基于模型的嵌入式设计及应用
需求与模型关联
通过rmi setup注册Active-X controls后Simulink Model菜单栏增加了需求追踪功能 追加了链接之后,文档中出现Simulink的小图标,能够从需求文档链接到模型;每当 需求出现了变更可以通过链接检查是否及时反映到所设计的模型中,以保持一致性
More about Simulink:to be continued
Simulink是什么
Matlab 上手容易,一般从调用简单 的绘图函数或矩阵创建开始 Simulink 要求整体把握,理有点难度, 一开始就要面对整个系统
Matlab 学科分支多,理论深度达, 后期依靠的是学术理论造诣
Simulink Simulink运行机制与流程的 理解,会加速应用的熟练度
simulink工程应用实例
simulink工程应用实例在Simulink中创建一个简单的模型,并将其应用于实际工程问题,可以很好地展示Simulink的工程应用能力。
下面,我们将通过一个实例来介绍如何在Simulink中创建一个简单的模型,并将其应用于实际工程问题。
实例:一个简单的控制系统在Simulink中创建一个简单的控制系统,该系统包括一个输入信号、一个带有一个参数的滞后环节和一个反馈控制器。
步骤1:创建模型在Simulink中创建一个新模型,打开模型窗口,并从模块库浏览器中拖动所需的模块到模型窗口中。
在这个例子中,我们需要的模块包括:* 输入信号(Input Signal)* 滞后环节(Delay Block)* 反馈控制器(Feedback Controller)步骤2:设置模块参数双击每个模块,设置其参数。
对于输入信号模块,选择一个适当的信号源,例如正弦波或方波。
对于滞后环节模块,设置其延迟时间和增益。
对于反馈控制器模块,设置其反馈增益和反馈路径。
步骤3:连接模块使用连接线将模块连接起来,使得输入信号通过滞后环节和反馈控制器后得到输出信号。
在连接线交叉处,双击以创建连接点。
步骤4:运行模型在Simulink中运行模型,观察输出信号。
可以通过单击“运行”按钮或按F5键来运行模型。
在运行过程中,可以随时单击“暂停”按钮或按Ctrl+C来停止运行。
步骤5:分析结果分析输出信号,判断控制系统是否能够有效地对实际工程问题进行控制。
如果需要,可以通过调整模块参数或添加其他模块来优化控制效果。
通过以上步骤,我们成功地在Simulink中创建了一个简单的控制系统模型,并将其应用于实际工程问题。
这个实例展示了Simulink在工程应用中的方便性和实用性。
Simulink建模仿真实例详解

模型可以分为实体模型和数学模型。 实体模型又称物理效应模型,是根据系统之间的相似性而建 立起来的物理模型,如建筑模型等。 数学模型包括原始系统数学模型和仿真系统数学模型。原始 系统数学模型是对系统的原始数学描述。仿真系统数学模型 是一种适合于在计算机上演算的模型,主要是指根据计算机 的运算特点、仿真方式、计算方法、精度要求将原始系统数 学模型转换为计算机程序。
0.6 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -1
0
1
2
3
4
5
6
7
8
9
10
例子2 单自由度系统: 初始条件:
& + cx & + kx = 0 m& x
解析解为:
& ( 0) = x &0 = 0 x(0) = x0 = 1, x
m 要求:采用 Simulink 对系统进行仿真。已知参数:
1.3.3 Simulink 应用举例
(原教材P6例子)
在Matlab命令窗口中输入 dblcart1 右图所示的模型用来 模拟双质量-弹簧系 统在光滑平面上受一 个周期力情况下的运 动状态,其中周期力 只作用在左边的质量 块上。 F(t)
x' = Ax+Bu y = Cx+Du Plant
Demux Actual Position
静态系统模型 动态系统模型 连续系统模型 代数方程 集中参数 微分方程 分布参数 偏微分方程 离散系统模型 差分方程
1.1.2 计算机仿真
1. 仿真的概念 仿真是以相似性原理、控制论、信息技术及相关领域的 有关知识为基础,以计算机和各种专用物理设备为工具,借 助系统模型对真实系统进行试验的一门综合性技术。 2. 仿真分类 ( 1 )实物仿真:又称物理仿真。是指研制某些实体模型, 使之能够重现原系统的各种状态。早期的仿真大多属 于这一类。 优点:直观,形象,至今仍然广泛应用。 缺点:投资巨大、周期长,难于改变参数,灵活性差。
Simulink在系统仿真中的应用 ppt课件
Simset( )
• 仿真参数options可以通过simset函 数来设置 • options=simset(参数名1,参数值1, 参数名2,参数值2,…) • 参数名为需要控制的参数名称 • 参数值为具体数值 • options=simset(‘RelTol’,1e-7)
• 这样用下面的语句就可以绘制出各 个状态变量的时间响应曲线,如图
⑸非线性模块组Discontinuous
• • • • • • Saturation Dead Zone Relay Rate Limiter Quantizer Backlash
⑹数学函数模块组Math Operations
• • • • • Sun Product Gain Matrix Gain Combinational Logic • • • • Math Function Abs Sign Trigonometric Function • Algebraic Constraint
⑺查表模块组Lookup Tables
• • • • Look Up Table Look Up Table (2-D) Look Up Table (n-D) Look-Up Table Dynamic
⑻用户自定义函数模块组Userdefined Functions
• Fcn • MATLAB Fcn • S-Function
• 在实际仿真中,如果模型中某个部 分数学运算特别复杂,则不适合用 普通simulink模块来搭建这样的部 分 • Simulink中支持两种语言编程的形 式来描述这样的模块 • M函数 • S函数
• M函数适用于描述输出和输入信号之间 为代数运算的模块 • S函数适用于动态关系的描述(状态方 程描述的关系) • S函数就是系统函数的意思 • S函数有固定的程序格式,用MATLAB 语言可以编写,此外还可以用C语言、 C++、Fortran和Ada等语言来编写,用 这些语言编写需要用编译器生成动态链 接库DLL文件,可以在simulink中直接 调用
Simulink3运行仿真Simulink教学课件
SIMULINK 3SIMULINK 3运行仿真运行仿真介绍两种Simulink运行仿真的方法3.1使用窗口运行仿真3.2 使用MATLAB 命令运行仿真本章内容和学习目的掌握以上两种运行仿真的方法3.1 使用窗口运行仿真1. 设置仿真参数优点人机交互性强不必记住繁琐的命令语句即可进行操作。
使用窗口运行仿真主要可以完成以下一些操作。
3. 启动仿真4. 停止仿真5. 中断仿真6. 仿真诊断2. 应用仿真参数仿真参数和算法选择的设置仿真参数和算法设置后使之生效选择命令运行仿真选择命令停止仿真可以在中断点继续启动仿真而停止仿真则不能在仿真中若出现错误Simulink将会终止仿真并在仿真诊断对话框中显示错误信息1. 设置仿真参数选择菜单选项【SimulationParameters】可以对仿真参数及算法进行设置共有五个∠羁▉6?解法设置Solver??工作间I/OWorkspace I/O??诊断页Diagnostics??高级设置Advanced??实时工具对话框Real-Time Workshop??解法设置Solver讲??工作间I/OWorkspace I/O讲??诊断页Diagnostics不讲自学??高级设置Advanced不讲自学??实时工具对话框Real-Time Workshop不讲自学设置起始和终止时间选择积分分解法指定求解参数和选择输出选项管理MATLAB工作间的输入输出项选择在仿真中警告信息的等级对仿真的一些高级配置进行设置对实时工具中若干参数进行设置。
若没有安装实时工具不出现此框。
1解法设置页当选中菜单选项【SimulationParameters】后出现参数及算法等设置页。
再点击【Solver】则出现解法设置页。
解法设置页包括三项内容设置仿真的启动时间和终止时间选择算法并指定参数选择输出项仿真时间仿真解法各种解法说明见下页默认解法ode45变步长解法ode45ode23ode113ode15discrete定步长解法ode5ode4ode3ode2ode1discrete最大步长初始步长输出选项用户用来控制仿真输出个数的对话框共有三个菜单选项定义输出产生附加输出产生指定输出。
simulink在工程中的应用

simulink在工程中的应用Simulink是MATLAB的一个扩展工具箱,它提供了一个图形化的仿真和建模环境,可以用于工程中的许多应用。
以下是Simulink在工程中的一些常见应用:1. 控制系统设计和仿真:Simulink可以用于设计和仿真各种控制系统,例如PID控制器、模糊控制器、神经网络控制器等。
通过Simulink,工程师可以快速构建控制系统模型,进行仿真和优化,从而实现更高效、更精确的控制系统设计。
2. 信号处理和通信系统设计:Simulink可以用于设计和仿真各种信号处理和通信系统,例如滤波器、调制解调器、信道编解码器等。
通过Simulink,工程师可以快速构建信号处理和通信系统模型,进行仿真和优化,从而实现更高效、更稳定的信号处理和通信系统设计。
3. 机器人控制和仿真:Simulink可以用于设计和仿真各种机器人控制系统,例如机器人路径规划、机器人视觉系统等。
通过Simulink,工程师可以快速构建机器人控制系统模型,进行仿真和优化,从而实现更高效、更精确的机器人控制和仿真。
4. 金融工程和数据分析:Simulink可以用于金融工程和数据分析,例如期权定价、风险管理、金融市场模拟等。
通过Simulink,工程师可以快速构建金融模型,进行仿真和分析,从而实现更高效、更精确的金融工程和数据分析。
5. 汽车工程和测试:Simulink可以用于汽车工程和测试,例如汽车控制系统仿真、汽车动力总成仿真、车辆稳定性仿真等。
通过Simulink,工程师可以快速构建汽车控制系统和动力总成模型,进行仿真和测试,从而实现更高效、更精确的汽车工程和测试。
总之,Simulink在工程中有着广泛的应用,可以用于设计和仿真各种控制系统、信号处理和通信系统、机器人控制和仿真、金融工程和数据分析、汽车工程和测试等领域,从而帮助工程师实现更高效、更精确的工程设计和仿真。
SIMULINK模块介绍
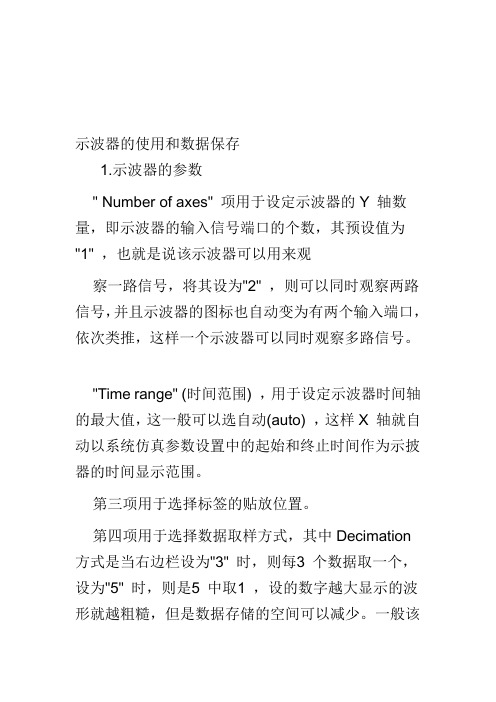
示波器的使用和数据保存1.示波器的参数" Number of axes" 项用于设定示波器的Y 轴数量,即示波器的输入信号端口的个数,其预设值为"1" ,也就是说该示波器可以用来观察一路信号,将其设为"2" ,则可以同时观察两路信号,并且示波器的图标也自动变为有两个输入端口,依次类推,这样一个示波器可以同时观察多路信号。
"Time range" (时间范围) ,用于设定示波器时间轴的最大值,这一般可以选自动(auto) ,这样X 轴就自动以系统仿真参数设置中的起始和终止时间作为示披器的时间显示范围。
第三项用于选择标签的贴放位置。
第四项用于选择数据取样方式,其中Decimation 方式是当右边栏设为"3" 时,则每3 个数据取一个,设为"5" 时,则是5 中取1 ,设的数字越大显示的波形就越粗糙,但是数据存储的空间可以减少。
一般该项保持预置值"1" ,这样输入的数据都显示,画出的波形较光滑漂亮。
如果取样方式选Sample time 采样方式,则其右栏里输入的是采样的时间间隔,这时将按采样间隔提取数据显示。
该页中还有一项"Floating scope" 选择,如果在它左方的小框中点击选中,则该示波器成为浮动的示波器,即没有输入接口,但可以接收其他模块发送来的数据。
示波器设置的第二页是数据页,这里有两项选择。
第一项是数据点数,预置值是5000 ,即可以显示5000个数据,若超过5000 个数据,则删掉前面的保留后面的。
也可以不选该项,这样所有数据都显示,在计算量大时对内存的要求高一些。
如果选中了数据页的第二项"Save data to workspace" ,即将数据放到工作间去,则仿真的结果可以保存起来,并可以用MATLAB 的绘图命令来处理,也可以用其他绘图软件画出更漂亮的图形。
04基于模型的设计在嵌入式控制系统开发中的应用

Physical Components Algorithms Code Verification and Validation
•Prevents Introduces defects and variance • Difficult to feed insights back into design process rapid iteration •No Difficult to reuse testing • Traceability system-level
Map to Block Diagram
Link Requirements
Implement Interfaces
5
• Easy to misinterpret Executable Specifications from Models • Difficult to manage as they change
Step Response
1
1 0.8
Amplitude
Requirements
0.8 0.6 0.4 0.2 0 2 2.5 3
0.6 0.4 0.2 0
0
2
4 Time (seconds)
6
8
Plant
S1 S3 S2
Software & Algorithms
C, C++ MCU Integration DSP
15
Implementation with Automatic Hyperlink Code Generation
within C code files.
Hyperlink back to model.
Hyperlink from model to code.
simulink模型库用法
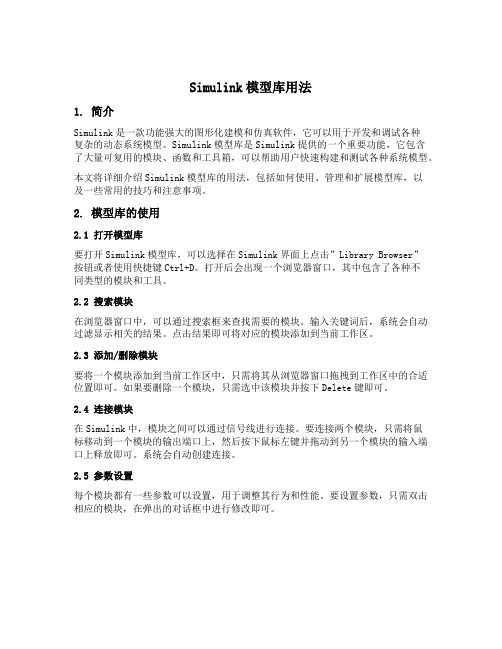
Simulink模型库用法1. 简介Simulink是一款功能强大的图形化建模和仿真软件,它可以用于开发和调试各种复杂的动态系统模型。
Simulink模型库是Simulink提供的一个重要功能,它包含了大量可复用的模块、函数和工具箱,可以帮助用户快速构建和测试各种系统模型。
本文将详细介绍Simulink模型库的用法,包括如何使用、管理和扩展模型库,以及一些常用的技巧和注意事项。
2. 模型库的使用2.1 打开模型库要打开Simulink模型库,可以选择在Simulink界面上点击”Library Browser”按钮或者使用快捷键Ctrl+D。
打开后会出现一个浏览器窗口,其中包含了各种不同类型的模块和工具。
2.2 搜索模块在浏览器窗口中,可以通过搜索框来查找需要的模块。
输入关键词后,系统会自动过滤显示相关的结果。
点击结果即可将对应的模块添加到当前工作区。
2.3 添加/删除模块要将一个模块添加到当前工作区中,只需将其从浏览器窗口拖拽到工作区中的合适位置即可。
如果要删除一个模块,只需选中该模块并按下Delete键即可。
2.4 连接模块在Simulink中,模块之间可以通过信号线进行连接。
要连接两个模块,只需将鼠标移动到一个模块的输出端口上,然后按下鼠标左键并拖动到另一个模块的输入端口上释放即可。
系统会自动创建连接。
2.5 参数设置每个模块都有一些参数可以设置,用于调整其行为和性能。
要设置参数,只需双击相应的模块,在弹出的对话框中进行修改即可。
3. 模型库的管理3.1 创建新的模型库除了默认提供的Simulink模型库外,用户还可以创建自己的模型库来管理和组织自己编写的模块。
要创建新的模型库,可以在浏览器窗口中选择”File”->“New”->“Library”,然后选择保存路径和名称即可。
3.2 添加/删除/编辑子系统在Simulink中,子系统是一种特殊类型的组件,可以将多个相关联的模块封装成一个单独的单元。
Simulink使用基本

Simulink使用基本Simulink是一种功能强大的图形化建模和仿真环境,用于分析和设计控制系统。
它是MATLAB的一个扩展工具箱,提供了一种直观和可视化的方法来创建和模拟动态系统模型。
在本文中,我们将介绍Simulink的基本使用方法。
在Simulink中,模型由一个个模块组成,每个模块代表系统的一个部分,例如传感器、执行器、控制器等。
这些模块通过线缆相互连接,以传递信号和数据。
要添加模块到模型中,我们可以在库浏览器中选择合适的模块,然后将其拖动到模型窗口中。
我们还可以使用快捷键B打开库浏览器,并通过栏来快速找到需要的模块。
一旦添加了模块,我们可以使用鼠标点击模块并拖动来改变连接线的位置。
要连接两个模块,只需将鼠标从一个模块上的端口位置拖动到另一个模块上的端口位置。
另外,我们还可以使用连接线工具栏上的线条样式来自定义连接线的样式,例如线的颜色、宽度等。
在进行仿真之前,我们需要设置模型的参数。
这包括设置仿真时间、步长和求解器等。
可以在模型窗口的工具栏上找到仿真按钮,点击后将启动仿真过程。
Simulink将按照设定的时间和步长,以及模型中各模块的逻辑,模拟系统的动态行为,并生成仿真结果。
仿真结果可以在仿真数据视图中查看和分析,包括系统的输入、输出、状态变量等。
除了基本的建模和仿真功能,Simulink还提供了许多高级功能和工具,用于系统控制、优化、验证等。
例如,我们可以使用状态流程图(Stateflow)来建模系统的离散事件行为,使用原型环境(Simscape)来建模物理系统,使用代码生成工具箱来生成嵌入式代码等。
Simulink还支持与MATLAB的混合编程,可以通过MATLAB脚本和函数来调用Simulink 模型,并在Simulink模型中使用MATLAB函数。
总结起来,Simulink是一个强大的图形化建模和仿真环境,适用于各种控制系统的分析和设计。
它提供了直观和可视化的方法来创建和模拟系统模型,并提供了丰富的工具和功能来支持系统开发的各个方面。
Simulink 使用
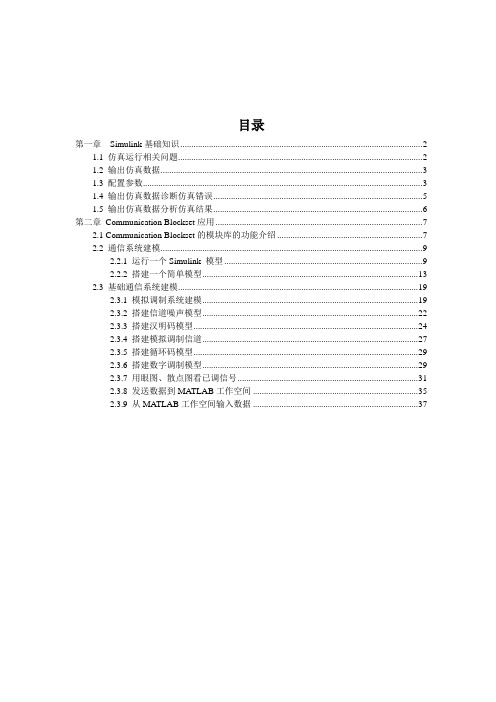
目录第一章Simulink基础知识 (2)1.1 仿真运行相关问题 (2)1.2 输出仿真数据 (3)1.3 配置参数 (3)1.4 输出仿真数据诊断仿真错误 (5)1.5 输出仿真数据分析仿真结果 (6)第二章Communication Blockset应用 (7)2.1 Communication Blockset的模块库的功能介绍 (7)2.2 通信系统建模 (9)2.2.1 运行一个Simulink 模型 (9)2.2.2 搭建一个简单模型 (13)2.3 基础通信系统建模 (19)2.3.1 模拟调制系统建模 (19)2.3.2 搭建信道噪声模型 (22)2.3.3 搭建汉明码模型 (24)2.3.4 搭建模拟调制信道 (27)2.3.5 搭建循环码模型 (29)2.3.6 搭建数字调制模型 (29)2.3.7 用眼图、散点图看已调信号 (31)2.3.8 发送数据到MATLAB工作空间 (35)2.3.9 从MATLAB工作空间输入数据 (37)第一章Simulink基础知识Simulink 是一个用于建模、仿真、分析动态系统的软件包。
它支持线性和非线性系统,也可以是多速率系统,也就是该系统有着不同采样速率的部分组成。
它也是一种基于模块的设计工具。
Simulink的特点在于:•Simulink 鼓励你去尝试任何事,你可以很容易地用草图来搭建模块,也可对现有的模型进行添加来搭建一个新模型,你可以看到仿真结果的图形,也可通过MA TLAB中的所有分析工具来分析结果。
•Simulink的目的是通过鼓励你提出一个问题,模拟它,然后看发生了什么这么一种过程让你觉得建模和仿真是一件有趣的事。
•Simulink也很实用,全世界成千上百的工程师正用它来模拟和解决实际问题,对这个工具的了解将对你的整个职业生涯都很有帮助。
1.1 仿真运行相关问题当仿真正在运行时,你可以交互地完成以下操作:1.修改一些配置参数,包括仿真停止时间和最大仿真步长2.用浮动示波器或显示模块来观察连线上传输的信号3.修改模块参数,只要不改变以下参数♦状态变量,输入,输出的个数♦采样时间♦过零点数♦任何模块参数的向量长度♦外部模块工作向量的长度在仿真过程中,你不可以改变模型结构如:添加删除连线或模块,除非你停止目前的仿真。
基于MATLABSimulink的嵌入式鲁棒控制系统设计

书中的带H∞滤波器的LQ调节器部分,更是给我留下了深刻的印象。H∞滤波器 是一种鲁棒性极强的滤波器,它能够在存在不确定性和干扰的情况下,仍然保 持系统的稳定性。通过结合LQ调节器,可以在保证系统性能的同时,提高系统 的鲁棒性。这部分内容不仅让我对H∞滤波器有了更深入的理解,也让我对鲁 棒控制系统的设计有了更全面的认识。
精彩摘录
《基于MATLAB Simulink的嵌入式鲁棒控制系统设计》这本书的精彩摘录
在科技日新月异的今天,嵌入式系统和鲁棒控制技术在许多领域,如航空航天、 自动驾驶、医疗设备等都发挥着重要的作用。而《基于MATLAB Simulink的嵌 入式鲁棒控制系统设计》这本书,则为我们提供了一个全面、深入的学习和实 践平台。
这本书还通过大量的实例和案例,向读者展示了如何在实际应用中运用这些控 制策略。这些实例和案例不仅让我对控制系统设计有了更直观的认识,也激发 了我对控制系统设计的兴趣和热情。
《基于MATLABSimulink的嵌入式鲁棒控制系统设计》是一本极具启发性的书 籍。它不仅提供了丰富的理论知识,还通过具体的实例和案例,向读者展示了 如何在MATLAB Simulink环境中进行嵌入式鲁棒控制系统设计。通过阅读这本 书,我不仅对控制系统设计有了更深入的理解,也对自己的职业发展有了更明 确的规划。我相信,在未来的工作中,我会将这些控制策略应用到实际项目中, 为公司的产品研发和技术进步做出贡献。
目录分析
《基于MATLAB Simulink的嵌入式鲁棒控制系统设计》目录分析
随着科技的不断进步,嵌入式系统和鲁棒控制技术在各个领域的应用越来越广 泛。为了满足这一需求,许多专家和学者编写了相关的教材和参考书。《基于 MATLAB Simulink的嵌入式鲁棒控制系统设计》就是其中的一本,它结合了 MATLAB Simulink这一强大的仿真工具,为读者提供了一个系统、全面的嵌入 式鲁棒控制系统设计方法。
simulink教程
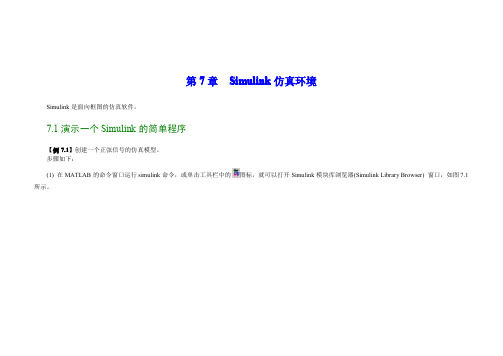
SIM ULINK 界面的默认设置选项 打印模型 关闭当前 Simulink 窗口 退出 MATLAB 系统 创建子系统 封装子系统 查看封装子系统的内部结构 更新模型框图的外观 显示当前系统的父系统 模型浏览器设置 鼠标位于模块上方时显示模块内部数据 显示库浏览器 自动选择最合适的显示比例 以正常比例(100%)显示模型 启动/停止仿真 暂停/继续仿真 设置仿真参数 普通 Simulink 模型 产生加速 Simulink 模型 标注文字对齐工具 翻转模块名 显示/隐藏模块名 翻转模块 旋转模块 显示库链接 显示/隐藏阴影效果 设置不同的采样时间序列的颜色 粗线表示多信号构成的向量信号线 注明向量信号线的信号数 标明端口数据的类型 显示存储类型 数据浏览器
菜单 工具栏 模型框图 模型浏览器
状态栏 图 7.5 双窗口模型窗口
1. 状态栏 2. 工具栏 模型窗口工具栏如图 7.6 所示。
展示父系统 创建并编译生成 exe 文件 打开调试器
开始仿真 结束仿真
仿真模型
更新模块框图
单双窗口切换 打开库浏览器
图 7.6 工具栏
3. 菜单 Simulink 的模型窗口的常用菜单如表 7.1 所示。
� �
图 7.9 翻转模块
7. 模块名的编辑
� � � �
修改模块名 单击模块下面或旁边的模块名,出现虚线编辑框就可对模块名进行修改。 模块名字体设置 选定模块,选择菜单“Format”�“Font”,打开字体对话框设置字体。 模块名的显示和隐藏 选定模块,选择菜单“Format”�“Hide / Show name”,可以隐藏或显示模块名。 模块名的翻转 选定模块,选择菜单“Format”�“Flip name”,可以翻转模块名。
使用MATLAB和Simulink开发嵌入式软件之模型质量目标

使用MATLAB和Simulink开发嵌入式软件之模型质量目标模型质量目标(Model Quality Objectives,以下简称 MQO)的标准是由一流的汽车厂商和MathWorks 公司共同制定,目的是当在嵌入式软件开发中 OEM 和供应商进行 Simulink 模型共享时,可以清晰定义并简化双方的协作,并最终提高软件产品的质量和完整性。
首先,基于软件开发生命周期的四个不同阶段用到的四种设计模型,本文定义了一套软件开发方法。
然后,针对每种模型,提出了一个名为MQO 的特定质量目标。
每个目标被定义为一组质量特征和一些可衡量的标准,称为模型质量要求(Model Quality Requirement,MQR)。
此外还提供了一些额外的规范,来管理与 MQO 和 MQR 相关的计划和质量评估活动。
在文章最后也对汽车工业采用MQO 的预期影响进行了总结。
◆◆◆◆为什么制定模型质量目标为了加速嵌入式软件的开发,用 Simulink 软件开发的设计模型在业界广泛使用。
这些模型使工程师能够完成各种工程任务,如频域分析、桌面仿真、形式验证和自动代码生成。
这个开发过程被称为基于模型设计。
出于验证需求和快速地探索设计方案的目的,可以在非常早期的阶段开发设计模型。
这些模型也可以逐步改进,直到它们达到一定成熟度,可生成符合国际软件安全标准的代码。
为了逐步增加设计模型的成熟度,需要涉及到系统工程、控制工程和软件工程等不同的工程学科。
使用相同的语言、工具和模型进行协作,是提高工程师之间的沟通、降低工程费用和缩短开发时间的好方法。
然而,由于在不同的项目阶段使用设计模型有不同的规程,可能会出现关于模型的作用和它们代表的内容间的混乱。
对模型代表的内容的错误解释会导致错误地使用这些模型,并最终影响所产生的软件的质量。
参与制定MQO 的OEM 和一级供应商分享了许多关于成熟度不够或存在漏洞的模型被过早地确定为“可用于编码”的惨痛案例。
第6章 Simulink简介
举例说明: 举例说明:建立有关模型
参数s_function name 为 sfunc_h 参数save format均为 Array
对整个模型: Simulation菜单下的 Simulation parameters中的 stop time 为50
模型功能:维持输入信号波形的峰值。
举例说明: 举例说明:S_function:sfunc_h
Simulink模型调试 模型调试
调试工具选项
break 设置断点时先要在模 在选定模 型窗口选中有关模块, 块前设置 然后再按设置断点按 断点 钮设置断点。 display 执行时显示选定模 块的输入输出 display 显示选定模块当前的 输入输出
step 单步调试
next 运行剩余 未运行的 模块,直 到断点
设定子系统模块外观: 设定子系统模块外观:Icon
显示外框与否 隐藏port标签与否 旋转模块与否 画外观图时的坐标系
画外观图的指令
画外观图的指令样本
举例: 触发器功能模型 举例:RS触发器功能模型
若S=1,R=0,则Q=1,Q’=0; 若S=0,R=1,则Q=0,Q’=1; 若S=0,R=0,则Q和Q’保持原状态; 若S=1,R=1,则应避免发生。
function [sys,x0,str,ts] = sfunc_h(t,x,u,flag) switch flag, case 0, [sys,x0,str,ts]=mdlInitializeSizes; case 1, sys=mdlDerivatives(t,x,u); case 2, sys=mdlUpdate(t,x,u); case 3, sys=mdlOutputs(t,x,u); case 4, sys=mdlGetTimeOfNextVarHit(t,x,u); 输入参数:t(时间)、x(状态向量)、u(输 入向量)、flag(Simulink执行何种操作阶 段的标记)。 输出参数:sys(阶段运算结果)、x0(初始 状态)、str(对M文件的S-function为空)、 ts(定义取样时间及偏移量)。 case 9, sys=mdlTerminate(t,x,u); otherwise error(['Unhandled flag = ',num2str(flag)]); end
嵌入式系统设计与应用[共5篇]
![嵌入式系统设计与应用[共5篇]](https://img.taocdn.com/s3/m/d9e6b0e06037ee06eff9aef8941ea76e59fa4a5e.png)
嵌入式系统设计与应用[共5篇]第一篇:嵌入式系统设计与应用第一章:嵌入式系统定义:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能,可靠性,成本,体积,功耗严格要求的专用计算机系统。
(一切非PC计算机系统)嵌入式系统特点:“专用”计算机系统,运行环境差异很大,比通用PC系统资源少,功耗低,体积小,集成度高,成本低,具有完整的系统测试和可靠性评估体系,具有较长的生命周期,需要专用开发工具和方法进行设计,包含专用调试电路,多学科知识集成系统。
嵌入式系统应用范围:汽车,工业控制,通信设备,消费电子,商业终端,航空航天,军事需求。
嵌入式系统的基本开发流程:系统定义与需求分析阶段,方案设计阶段,详细设计阶段,软、硬件集成测试阶段,系统功能性测试及可靠性测试阶段。
系统定义与需求分析阶段:对系统需求进行分析,制定系统的设计依据。
方案设计阶段:确定系统初步设计方案并形成设计描述文档。
详细设计阶段:完善初步方案,对方案实施详细设计。
软硬件集成测试阶段:对系统软硬件进行综合测试,验证系统设计功能。
系统功能性能测试及可靠性测试测试:对系统功能,性能,可靠性进行综合测评。
对于使用操作系统的嵌入式系统来说,嵌入式系统软件结构一般包含4个层面:板级支持包层,实时操作系统(RTOS)层,应用程序接口(API)层,应用程序层。
有些资料将应用程序接口API归属于OS层,按3层划分的应用程序控制系统的运作和行为;操作系统与硬件无关,不同的嵌入式操作系统其组成结构也不尽相同嵌入式操作系统种类繁多,大体分为两种:商用型和免费型商用型:VxWorks,Windows CE,pSoS,Palm OS,OS-9,LynxOS,QNX和LYNX 免费型:Linux和uC/OS—II uC/OS—II具有执行效率高,占用空间小,可移植性及扩展性强,实施性能优良,稳定性和可靠性良好等特点。
其内核采用微内核结构,将基本功能(如进程管理,存储管理,中断处理)放在内核中,留给用户一个标准API 函数,并根据各个任务的优先级分配CPU时间。
Simulink组件的基本使用方法

查看仿真结果
显示图形
在仿真结果模块中,选择"Graph"或"Chart"选项卡, 可以显示仿真结果的图形。
调整图形参数
在图形界面中,可以调整坐标轴范围、线型、颜色等 参数,以便更好地显示仿真结果。
导出结果
可以将仿真结果导出为CSV、Excel等格式,以便进 一步分析。
调试模型
设置断点
在Simulink模型中,选择需要 设置断点的模块或线段,然后 点击工具栏上的"Breakpoint"
使用回调函数与事件
第一季度
第二季度
第三季度
第四季度
回调函数
回调函数是一种特殊的 函数,可以在特定的事 件发生时被自动调用。 在Simulink中,可以 使用回调函数来定义当 模型状态改变时需要执 行的代码。
事件
事件是Simulink中一 种特殊的状态变化,当 模型的状态满足一定条 件时,就会触发相应的 事件。可以使用回调函 数来定义当事件发生时
参数设置
在创建子系统后,可以在子系统的参数设置中定 义其输入和输出端口、参数和采样时间等属性。
创建子系统
在Simulink编辑器中,选择“Tools”菜单下的 “Subsystem”选项,然后在打开的对话框中输 入子系统的名称和描述。
调用子系统
在模型中需要使用子系统的地方,将子系统模块 拖拽到模型中,然后将其端口与外部模块连接起 来。
Simulink组件的功能
信号处理
Simulink提供了丰富的信号处理组件, 如滤波器、频谱分析等,用于对输入信
号进行处理。
算法开发
Simulink支持使用MATLAB函数和算 法,使得用户可以在模拟模型中实现
matlab Simulink用户手册
教育部重点实验室软件操作手册之Matlab Simulink用户手册合肥工业大学管理学院2010-10-22目录1 简介 (4)1.1 产品概述 (4)1.1.1 概述 (4)1.1.2 基于模型的设计工具 (4)1.1.3 仿真工具 (5)1.1.4 分析工具 (5)1.1.5 Simulink软件是如何和matlab环境交互的 (5)1.2 什么是基于模型的设计 (6)1.2.1 以模型为基础的设计 (6)1.2.2 建模过程 (6)1.3 相关产品 (7)2 Simulink软件基本知识 (8)2.1 启动Simulink软件 (8)2.1.1 打开Simulink模块库浏览器 (8)2.1.2 打开一个模型 (9)2.2 Simulink使用者接口 (11)2.2.1 Simulink模块库浏览器 (11)2.2.2 Simulink模型窗口 (13)2.3 从Simulink软件中寻找帮助 (13)2.3.1 Simulink在线帮助 (13)2.3.2 Simulink演示模型 (14)2.3.3 网站资源 (15)3 创建一个Simulink模型 (15)3.1 概述 (15)3.2 创建一个简单的模型 (16)3.2.1 概述 (16)3.2.2 创建一个新模型 (16)3.2.3 在你的模型中增加模块 (17)3.2.4 从模型窗口中移动模块 (18)3.2.6 保存模型 (21)3.3 仿真这个模型 (21)3.3.1 概述 (21)3.3.2 设置仿真选项 (22)3.3.3 运行仿真然后观察结果 (22)4 建立一个动态控制系统的模型 (23)4.1 概述 (23)4.2 理解演示模型 (24)4.2.1 打开演示模型 (24)4.2.2 剖析演示模型 (24)4.2.3 使用子系统 (25)4.2.4 封装子系统 (27)4.3 仿真这个模型 (28)4.3.1 运行仿真 (28)4.3.2 修改仿真参数 (29)4.3.3 从matlab工作窗口中输入数据 (33)4.3.4 输出数据到matlab工作区 (36)1 简介1.1 产品概述1.1.1 概述Simulink软件可以建模,仿真和分析动态系统。
利用Simulink进行车用嵌入式控制器算法的设计

利用Simulink进行车用嵌入式控制器算法的设计
周伟丽;魏敏;田国强
【期刊名称】《汽车制造业》
【年(卷),期】2024()2
【摘要】本文基于可视化仿真工具Simulink进行某款车用嵌入式控制器控制模型的设计及代码生成,方法简便,易于推广。
本模型的数字信号从输入端到采样,然后再进行低通滤波算法处理及傅里叶变换,通过积分求和及判断阈值,对某个信号进行触发。
建模仿真通过后,生成C代码以供后续嵌入式控制器进行调用。
【总页数】3页(P28-30)
【作者】周伟丽;魏敏;田国强
【作者单位】上汽通用五菱汽车股份有限公司
【正文语种】中文
【中图分类】TP3
【相关文献】
1.利用Simulink仿真的弹道辨识算法精度分析
2.用MATLAB/SIMULINK进行车辆控制系统的设计
3.基于Simulink的机械臂PID算法优化设计与实现
4.基于功能模块及权重因子的嵌入式控制器原理图自动设计算法及实现
5.基于CarSim与Simulink联合仿真的路口转向AEB控制算法设计与验证
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
->模型与代码连接
->你我与Matlab/Simulink连接
3
Copyright 2014 FUJITSU LIMITED
Simulink是什么
模块库 模型
波形
普遍认识 从Simulink Browser里选择模块,建 立模型并且进行仿真。
4 Copyright 2014 FUJITSU LIMITED
12
Copyright 2014 FUJITSU LIMITED
基于模型的嵌入式设计及应用
基于模型设计
Model Based Design,基于模型设计是一种流程,较之传统软件开发流程而言, 使开发者能够更快捷、以更少的成本花费进行开发。适用范围包括信号处理,控制 系统,通信行业。表述系统的模型是整个开发流程的中心,贯穿需求,设计,实施 与测试。模型本身就是一个可执行的规格书,开发者修改优化模型就是对设计的修 缮,无需到实施之后通过测试再进行系统验证,可以通过仿真在早期设计时期就及 时进行正确性验证,并且在实施阶段,特别是对于嵌入式软件,代码由模型生成。
Copyright 2014 FUJITSU LIMITED
Simulink能够做什么
视频处理
跟Matlab一样功能强大,具有动态系统仿真的功能,包含信号处理,图像视频处理, 数值运算,控制系统等等各个方面。
视频帧差分使能录像仿真
7
Copyright 2014 FUJITSU LIMITED
Simulink能够做什么
音乐播放器
Simulink作为功能强大的动态仿真工具,通过模型建立,运行仿真,甚至自定义模块 应用于信号处理音频处理,数值运算,控制系统等等各个方面。
使用自带模块搭建 音频解析器,方便 快捷。 稍作加工即可实现: 播放开始后进行音 量调节、暂停、继 续以及播放停止等 动作。 构成音乐播放器
8 Copyright 2014 FUJITSU LIMITED
Simulink及基于模型设计的 嵌入式应用
FNST第三事业部第一开发部主任工程师 孙忠潇 Simulink基础版主及代码生成版主:hyowinner
2014年5月24日
Copyright 2014 FUJITSU LIMITED
目录
@Simulink是什么
各家释意 用户群分析 学习难度分析
@Simulink能够做什么
Simulink是什么
Matlab 上手容易,一般从调用简单 的绘图函数或矩阵创建开始 Simulink 要求整体把握,理有点难度, 一开始就要面对整个系统
Matlab 学科分支多,理论深度达, 后期依靠的是学术理论造诣
Simulink Simulink运行机制与流程的 理解,会加速应用的熟练度
6
concentration(kg/m3)
200 100 0
200 100 0
concentration(kg/m3)
0 100 200 steps 300 400
300
300
300 200 100 0
0
100
200 steps
300
400
0
100
200 steps
300
400
concentration(kg/m3)
Simulink能够做什么
发动机控制
使用Simulink进行汽车发动机控制规格设计,采用基于模型设计的嵌入式软件开发 流程,经过代码自动生成和各个阶段的严格测试,实现汽车发动机控制代码的量产。
10
Copyright 2014 FUJITSU LIMITED
Simulink能够做什么
自定义功能
S Function是Simulink Engine运行的机理体现,同时也给予用户自定义模块的功能 甚至可以自己定义工具箱加入到Simulink Browser中,让你随心所欲! 自定义娱乐工具箱
视频处理 音频处理 工业流程模拟 发动机控制 自定义娱乐工具箱 Target Support Package目标芯片的驱动工具箱
@基于模型的嵌入式设计及应用
MBD(Model based Design) 代码自动生成相关知识 MBD demo——滤波器建模,生成代码以及验证
2 Copyright 2014 FUJITSU LIMITED
Simulink能够做什么
工业仿真
跟GUI结合开发工业仿真软件,具有动态系统仿真的功能,包含信号处理, 图像视频处理,流程模拟,数值计算,控制系统,等各个方面。 工业乙醇连续发酵仿真
concentration(kg/m3)
300 200 100 0
0
100
200 steps
300
400
concentration(kg/m3)
11
Copyright 2014 FUJITSU LIMITED
Simulink能够做什么
TSP
Target Support Package是针对某一系列MCU/DSP芯片的驱动代码配置与自动生成 工具箱,给MBD嵌入式开发者提供快速算法验证环境,FM4 TSP主要有以下优点: 1.无需编写驱动代码:使用者通过简单的对话框设置即可生成驱动代码 2.生成代码有效:错误的不合理的驱动配置模型会通过错误提示让使用者改正 3.流程自动化:从模型代码生成,IDE启动,工程创建,编译,下载一键完成
Simulink是什么
粉丝 根据论坛回帖数统计判断, 大概只有Matlab的1/8
阶段 Simulink的使用者较多都有 着坚实的Matlab技术基础
特点 Simulink的使用者较多都 有耐心,入门门槛较高
期待
Simulink的使用者都期待其 功能更加强大,能快速实现 想要做的事
5 Copyright 2014 FUJITSU LIMITED组件之一,它提 供一个动态系统建模、仿真和综合分析的集成环境。
@Matlab2013b:simulink opens the Simulink® Library
Browser.
@Hyowinner:Simulink = Simu + Link Simu -> Simulation ->仿真 ->具象化逻辑及结果 Link -> 连接 ->模块与库连接 ->设计与需求连接
concentration(kg/m3)
200 100 0
200 100 0
concentration(kg/m3)
0 100 200 steps 300 400
300
300
300 200 100 0
0
100
200 steps
300
400
0
100
200 steps
300
400
9
Байду номын сангаас
Copyright 2014 FUJITSU LIMITED