计算机辅助光学设计 code V.共97页
计算机辅助光学设计_code_V_S2
• In this case, we will use the patent database, making use of the “filter” capability to narrow down the search based on the required specifications
Introduction to CODE V Training, Fall 2003, Slide 2-‹#›
Run the New Lens Wizard
• Choose the File > New menu to launch the NLW
– Click Next> to clear the Welcome Screen – Click the Patent Lens button, then click Next>
>90% (central) >30% (central) >85% (outer) >25% (outer)
Objective Lens
e. Focus f. Focal length g. Geometric Distortion h. f/number i. Sharpness
Low freq., 17 lp/mm High freq., 51 lp/mm
• Click the Next> button
Note that each patent lens file includes a lens drawing, and this one shows three defined field angles
Introduction to CODE V Training, Fall 2003, Slide 2-‹#›
光学计算机辅助设计
目录一、建立初始结构 (2)二、插入多重组态 (2)三、优化操作数 (3)四、进行优化 (5)五、镜头替换 (7)六、公差分析 (8)七、零件图 (9)八、设计感想 (11)一、建立初始结构打开ZEMAX,新建一个文件,输入初始数据,设置数值孔径为0.24,波长为1.55nm后的2D图形与斑点图如下:图1二、插入多重组态(一)插入Config1-3三个组态:打开Editor--Multi Configuration Editor--Insert(加两行)--Insert Config(加两列);(二)设置厚度:将 7、9、11三个面的厚度分别设为50m、100m、150m;(三)此时,3D图如下:图2三、优化操作数1.设置约束条件(一)输入操作数;(二)用到的操作数:TTHI:设置厚度OPLT:厚度、间隙小于多少REAX:实际光线数据的约束OPGT:厚度、间隙大于多少EFLX:两器件组合焦距EFFL:两器件系统焦距DIFF:两个操作数相减ABSO:取绝对值(三)设置相应的Target与Weight值,双击刷新Value与Contrib(贡献值)如下图:图3图4 (四)设置完成后初始图:图5四、进行优化(1)根据上述问题进行修改,优化MXCA的贡献值过大,我将MXCA –surf1、surf2的值由1-11改为1-10,优化(opt)后贡献值接近0,修改数据优化后:图6(2)出现的错误图形错误原因:6.7面相隔距离太近图7(3)由于初始结构图形较差,修改参数(将后3个镜面曲面半径设置成无穷)查看贡献值,修改数据优化后图8(4)HAM优化后图9五、镜头替换(1)进行镜头替换前图10(2)替换6、7面透镜半径,厚度等数据优化(Ham)后得到的2D图与艾里斑图图11六、公差分析(一)首先,删除提示项。
然后,更改Monte Carlo值为5,得到如图所示Worst offenders值及Standard Deviation值。
【资料】计算机辅助光学设计-code-v-s2汇编
f. Focal length
Fixed, 6.0 mm
g. Geometric Distortion
<4%
h. f/number
Fixed aperture, f/3.5
i. Sharpness
MTF through focus range (central is inner 3 mmof CCD)
Command Line
Introduction to CODE V Training, Fall 2003, Slide 2-‹#›
Plot Window
Tabbed Output WiOptions
• CODE V has two major levels, LDM and Options
– Work with system data, basic solves, lens drawings, surface data, scaling, MTF, and more
– Use Optimization to improve the lens – Perform Tolerance Analysis
• Surface data is accessed from the LDM spreadsheet and from the Lens > Surface Properties menu
– LDM spreadsheet displays basic data – Surface Properties dialog shows all data for a surface
– Each option creates its own tabbed output window (TOW) – Option input can be modified or re-run from its TOW
电子光学系统计算机辅助设计(CAD)总结报告
电子光学系统计算机辅助设计(CAD)总结报告班级XXX学号XXX姓名XXX指导老师XXX摘要本课程设计以C语言为编程工具,综合运用《光电成像原理与技术》课程中有关的原理与知识,比如电场三大定理、超张弛连续迭代算法、拉格朗日插值算法等,使用计算机辅助设计将光电成像器件——像增强器中电子光学系统中各点的电位分布等计算、模拟出来。
所编写的程序可以在给定像管参数和电极电位的情况下,计算圆柱形像管内任意一点的电位大小,并绘制出像管内的等势线;拉格朗日插值得到对称轴上任一点的电位值。
关键词:电子光学系统;连续超张弛迭代;拉格朗日插值;电位叠加定理AbstractThis course is designed with C language programming tools,integrated use the principles and knowledge of "optical imaging theory and technology" course. Such as electric three theorems, super relaxation continuous iterative algorithm, and Lagrange interpolation algorithm. Using computer-aided design, we calculate and simulate the potential distribution of optoelectronic imaging device, image intensifier, in electron optical system at various points. In case the image tube parameters and electrode potential are known, the program written can get the potential of every point in the image tube, and plot equipotential lines inside the image tube. It can also get the potential of every point on the axis of symmetry by Lagrange interpolation.Key words: electron optical system; SOR; Lagrange interpolation; electric potential superposition theory目录一、前言 (1)二、理论基础 (1)2.1 有限差分法、SOR法以及等位点扫描 (1)2.2 扫描等位线 (3)三、程序设计思想 (3)四、程序主要变量与数组名 (4)五、程序流程框图 (5)六、使用说明 (6)七、误差分析 (7)7.1减少截断误差的方法: (7)7.2 减小残差的方法 (7)八、数据处理 (7)九、结果讨论 (10)十、致谢 (10)十一、参考文献 (11)附录一程序代码 (12)附录二输入数据 (37)附录三输出数据 (38)一、前言通常,电子光学系统的计算机辅助设计方法可以用来解决以下问题:1.计算系统的电场和磁场分布,包括旋转对称聚焦场、偏转场等;2.计算电子在电磁场中运动的轨迹;3.计算成像器件电子光学系统的成像参量(成像系统的像面位置、放大率 等)和偏转系统的偏转灵敏度等;4.计算系统的像差,包括各级几何像差(球差、彗差、场曲、像散、畸变 等)和色差,阴极透镜的近轴像差,偏转系统的偏转像差等;5.计算电子光学系统的像质评定指标——电子光学鉴别力和传递函数等。
计算机辅助光学设计(第一章)
图1.8为扩展光源在一个曲线段上的反射。图中R为 扩展光源半径,P(x,y)为边界光线在曲面上的入射点, (x,y)为光源上点的坐标,其切线即为相应于点P(x,y)的光 源的一条边界光线。图中用实线表示,另一条边界光线 用虚线表示,r为光源中心到此入射点的距离dr为入射 点处曲线的切向量,通过控制曲线段的参数可令实线表 示的边界光线入射到目标位置点Q处
由式可得,短焦距的凸透镜更加有效提高能 量收集率。而在成像光学中,具有相同口径的透 镜,短焦距透镜的曲率大于长焦距的透镜,由相 差理论,前者的成像质量不如后者。光斑在焦平 面上有一定的弥散,降低了系统的光能利用率。 非成像光学系统不再考虑成像光学中的像差理论 和成像质量,而是把光能利用率作为系统的评价 标准,更适用于以提高光能利用率为主要目标的 照明系统。
现有非成像系统如下图所示入光线方向为L, 光线输出处的橫截面积为A’,输出角为∑’,假设光学系 统无反射、折射、吸收等能量损失,根据光学扩展量有: sin2∑ A = sin2∑’A’
根据输入输出的面积和角度的关系,定义 能量收集比率C为:
1.LED小型投影仪
下图为方棒照明系统。由图知:光线在方棒内壁进行 了3次左右反射之后,在方棒出口处形成了一矩形的均匀 光斑。若在方棒出口处与显示芯片之间设计一组光学透 镜,将方棒出口处的光斑成像到显示芯片上,实现均匀 照明。
方棒照明系统
2.景观照明:包括商业街、步行街道路照明、商业建筑 物户外照明、广告招牌照明等。 3.汽车前车灯:超高亮度LED可以做成刹车灯、方向灯、 尾灯,也可用仪表照明和车内照明,它 在耐震动、省电、长寿命方面比白炽灯 具有明显优势。 4.LED手电筒:传统的灯泡手电的优点是光谱连续、光 色舒适,但在低功率下效率较低,在电 量不足时灯会变黄变暗。而LED灯具有 远射性能,减少光散射,令聚焦更准确, 使光束平行射出,使光线更柔和。
计算机辅助光学设计 code V.共97页
•
26、我们像鹰一样,生来就是自由的 ,但是 为了生 存,我 们不得 不为自 己编织 一个笼 子,然 后把自 己关在 里面。 ——博 莱索
•
27、法律如果不讲道理,即使延续时 间再长 ,也还 是没有 制约力 的。— —爱·科 克
•
28、好法律是由坏风俗创造出来的。 ——马能够接受法律支配的人类 的状态 中,哪 里没有 法律, 那里就 没有自 由。— —洛克
•
30、风俗可以造就法律,也可以废除 法律。 ——塞·约翰逊
谢谢!
51、 天 下 之 事 常成 于困约 ,而败 于奢靡 。——陆 游 52、 生 命 不 等 于是呼 吸,生 命是活 动。——卢 梭
53、 伟 大 的 事 业,需 要决心 ,能力 ,组织 和责任 感。 ——易 卜 生 54、 唯 书 籍 不 朽。——乔 特
55、 为 中 华 之 崛起而 读书。 ——周 恩来
光学计算机辅助设计报告
光学设计辅助报告姓名:张雨辰学号:1011100139光学计算机辅助设计报告内容一:已知参数双胶合望远物镜的像质评价1)像质评价的意义:任何一个光学系统不管用于何处,其作用都是把目标发出的光按仪器工作原理的要求改变它们的传播方向和位置,送入仪器的接收器,从而获得目标的各种信息,包括目标的几何形状、能量强弱等。
因此,对光学系统成像性能的要求主要有两个方面:第一方面是光学特性,包括焦距、物距、像距、放大率、入瞳位置、入瞳距离等;第二方面是成像质量,光学系统所成的像应该足够清晰,并且物像相似,变形要小。
第一方面的内容即满足光学特性方面的要求属于应用光学的讨论范畴,第二方面的内容即满足成像质量方面的要求,则属于光学设计的研究内容。
从物理光学或波动光学的角度出发,光是波长在400~760nm的电磁波,光的传播是一个波动问题。
一个理想的光学系统应能使一个点物发出的球面波通过光学系统后仍然是一个球面波,从而理想地聚交于一点。
但是实际上任何一个实际光学系统都不可能理想成像。
所谓像差就是光学系统所成的实际像与理想像之间的差异。
由于一个光学系统不可能理想成像,因此就存在一个光学系统成像质量优劣的评价问题,从不同的角度出发会得出不同的像质评价指标。
从物理光学出发,推导出几何像差等像质评价指标。
有了像质评价的方法和指标,设计人员在设计阶段,即在制造出实际的光学系统之前就能预先确定其成像质量的优劣,光学设计的任务就是根据对光学系统的光学特性和成像质量两方面的要求来确定系统的结构参数。
2)像质评价的方法与Zemax实现:对于像质评价有两个阶段:1 设计完成后,加工前,对成像情况进行模拟仿真;2 加工装配后,批量生产前,要严格检测实际成像效果。
当前我们所作的工作就是对第一阶段进行实际讨论。
对于像质评价的方法有两种:1 不考虑衍射:光路追迹法(点列图,像差曲线);2 考虑衍射:绘制成像波面,光学传递函数等;有:瑞利判断:几何像差曲线进行图形积分得到波像差;中心点亮度(斯托列尔准则):成像衍射斑的中心亮度和不存在像差时衍射斑的中心亮度之比S.D来表示成像质量;分辨率:反映光学系统分辨物体细节的能力,可以评价成像质量;点列图:由一点发出的许多光线经光学系统后,因像差使其与像面的交点不再集中于同一点,而形成了一个散布在一定范围的弥散图形,称为点列图;传递函数:一定空间频率下像的对比度与物的对比度之比。
计算机辅助光学设计_code_V_S6
What is an Error Function?
• A single positive number that represents the quality of the optical system
• Structured such that smaller values are better than larger values
• Step 2 - In AUTO, select the error function type on the Error Function Definitions and Controls tab
– The default CODE V error function is usually a good start, but you may wish to make minor modifications, such as number of rays
this) – Aperture weighting (default tries for tight core with some allowed flare)
Introduction to CODE V Training, Fall 2003, Slide 6-6
Reducing the Error Function
• Takes significantly longer than local optimization • Not covered further in this seminar
Introduction to CODE V Training, Fall 2003, Slide 6-7
How CODE V Handles Constraints
• Step 3 - Specify constraints (in addition to default general constraints)
光学计算机辅助设计讲义-1
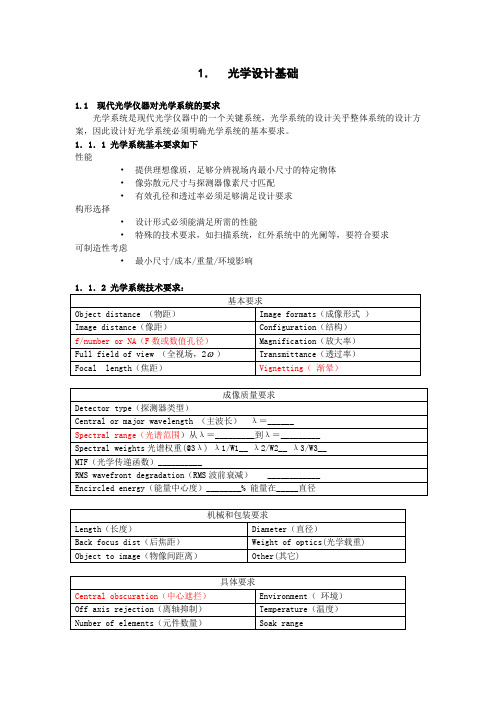
1.光学设计基础1.1现代光学仪器对光学系统的要求光学系统是现代光学仪器中的一个关键系统,光学系统的设计关乎整体系统的设计方案,因此设计好光学系统必须明确光学系统的基本要求。
1.1.1 光学系统基本要求如下性能•提供理想像质,足够分辨视场内最小尺寸的特定物体•像弥散元尺寸与探测器像素尺寸匹配•有效孔径和透过率必须足够满足设计要求构形选择•设计形式必须能满足所需的性能•特殊的技术要求,如扫描系统,红外系统中的光阑等,要符合要求可制造性考虑•最小尺寸/成本/重量/环境影响1.1.2 光学系统技术要求:1 f/number or NA (F 数或数值孔径):F 数俗称光圈。
在光学系统技术指标中,F 数是一个非常关键的指标,在设计之前就必须确定的值。
焦距一定,F 数越小,通光孔径越大,设计的难度也相对较高。
/f f num ber D'=focal length 焦距=clear aperture diameter 通光孔径D(又称入瞳直径):孔径光阑在物孔径的共轭像孔径光阑:限制进入光学系统的成像光束口径的光阑,如人眼的瞳孔1/D f num berf ='相对孔径=数值孔径sin N A n U =数值孔径与F 数2 Full field of view (全视场,2 )Aspect ratio投影比一般可以指定某一视场,如水平视场。
如CCD相机镜头以3×4×5的投影比覆盖传感器,水平视场为0.8视场。
若指定的视场小于全视场,必须说明是某视场。
例如,将视场指定为±10°,则全对角视场为20°,或半视场10°。
3 Vignetting(渐晕):像平面边缘部分比中心暗这种现象称为“渐晕”.D, Dw’: 光束宽度线渐晕系数: K=Dw/D4 Spectral range(光谱范围):是光学系统所能覆盖的波带。
例如,可见光系统一般覆盖约450~650范围内的光谱。
光学计算机辅助设计讲义3-4
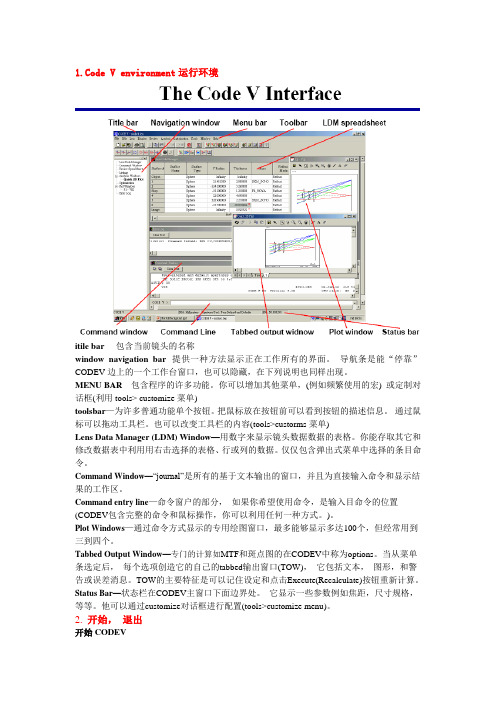
1.Code V environment运行环境itile bar----包含当前镜头的名称window navigation bar--提供一种方法显示正在工作所有的界面。
导航条是能“停靠”CODEV边上的一个工作台窗口,也可以隐藏,在下列说明也同样出现。
MENU BAR---包含程序的许多功能。
你可以增加其他菜单,(例如频繁使用的宏) 或定制对话框(利用tools> customize菜单)toolsbar—为许多普通功能单个按钮。
把鼠标放在按钮前可以看到按钮的描述信息。
通过鼠标可以拖动工具栏。
也可以改变工具栏的内容(tools>custorms菜单)Lens Data Manager (LDM) Window—用数字来显示镜头数据数据的表格。
你能存取其它和修改数据表中利用用右击选择的表格、行或列的数据。
仅仅包含弹出式菜单中选择的条目命令。
Command Window—“journal”是所有的基于文本输出的窗口,并且为直接输入命令和显示结果的工作区。
Command entry line—命令窗户的部分,如果你希望使用命令,是输入目命令的位置(CODEV包含完整的命令和鼠标操作,你可以利用任何一种方式。
)。
Plot Windows—通过命令方式显示的专用绘图窗口,最多能够显示多达100个,但经常用到三到四个。
Tabbed Output Window—专门的计算如MTF和斑点图的在CODEV中称为options。
当从菜单条选定后,每个选项创造它的自己的tabbed输出窗口(TOW),它包括文本,图形,和警告或误差消息。
TOW的主要特征是可以记住设定和点击Execute(Recalculate)按钮重新计算。
Status Bar—状态栏在CODEV主窗口下面边界处。
它显示一些参数例如焦距,尺寸规格,等等。
他可以通过customize对话框进行配置(tools>customize menu)。
计算机辅助艺术设计课程设计
计算机辅助艺术设计课程设计介绍随着计算机技术的不断发展,计算机在艺术设计领域中的应用越来越广泛。
计算机辅助艺术设计课程旨在通过让学生熟悉计算机软件、硬件及其在艺术设计方面的应用,帮助学生提高艺术设计水平。
本文档将对计算机辅助艺术设计课程进行设计和规划,包括课程目标、教学内容、教学方法、考核方式等,旨在帮助教师更好地开展教学,促使学生在艺术设计和计算机应用方面取得更好的成绩。
课程目标本课程的主要目标包括:1.让学生熟悉常用的计算机软件、硬件及其在艺术设计方面的应用;2.培养学生的计算机应用能力,以及在艺术设计方面的创新思维能力;3.提高学生的艺术设计水平,包括色彩搭配、构图、设计风格等方面。
教学内容本课程的教学内容主要包括以下几部分:艺术设计基础本部分内容主要是讲解艺术设计的基础知识,包括色彩原理、光影、构图、设计风格等方面。
通过这部分内容的学习,让学生对艺术设计有一个系统的认识,并进一步提高自己的艺术设计水平。
设计软件的使用本部分内容主要是讲解一些常用的设计软件,如Photoshop、Illustrator、Sketch等,让学生尝试使用这些工具进行设计,并掌握一些常用的设计技巧。
图片、字体的处理本部分内容主要是讲解如何处理图片、字体等素材。
通过学习这部分内容,学生可以掌握一些基础的图片处理技巧,如色彩调整、添加特效等,并了解一些常用的字体。
实践项目本部分内容主要是针对不同的实践项目进行设计和实践,例如制作品牌logo、设计户外广告等。
通过这些实践项目的设计,学生可以将课堂所学知识应用到实践中,提高自己的实践能力。
教学方法本课程的教学方法主要包括以下几种:讲授教师通过PPT、视频等形式向学生讲解艺术设计基础、设计软件的使用方法、各种素材的处理等方面的知识。
上机实践教师安排上机实践时间,让学生在计算机上进行相关设计操作。
同时,教师也可以根据需要设置一些练习题,加深学生对所学知识的理解。
项目实践教师通过组织不同的实践项目,让学生将所学知识应用到实践中,并和同学一起进行项目制作,形成小组合作学习氛围。
计算机辅助光学设计 code V S5.
3280 East Foothill Boulevard Pasadena, California 91107 USA (626) 795-9101 Fax (626) 795-0184 e-mail: service@ World Wide Web:
• FOO
Footprint of optical ray bundles on surfaces. Ideal diagnostic for aperture sizing and clearance determinations
• CAT
Catseye Plot of apertures/obstructions as projected onto pupil
• Diagnostic analyses
– Used primarily by the designer – Aberration analyses (first- and third-order, ray fans, etc.) – Single ray tracing
• Geometrical and Diffraction-based Image evaluations
Diagnostic Analysis Options: Analysis > Diagnostics
• FIO • RSI/SIN • BEA
• THO
• FORDER • ANA • RIM • FIE
Paraxial Ray Trace of marginal and chief ray. Useful for understanding 1st order properties of the system
计算机辅助光学设计codeV
第二章 光学自动优化设计 的基本方法
概述 评价函数的概念及其构成 最优化方法 边界条件的控制
光学自动优化设计概述
光学设计的目的 找到一组结构参数(r、d、材料等), 使之满足预定的光学性能,外形尺寸和 成像质量等要求 方法 数学的最优化方法和计算机在光学设 计中的应用
光学自动优化设计概述
A
-U
U'
L' -l l'
-L'
返回
图5.1
T'
球差的影响与危害
一个点形成的像为一个圆斑,破坏了理 想成像的对应关系,使像点变得模糊, 降低了成像的清晰度和分辨率。 球差产生在轴上点(视场中心处),对 整个像面的影响最为明显,必须加以校 正。
球差曲线
h hm 1 0.707
h h hm 1
高斯像面
-K' t a' z' B' t c Y' b Y' z
a z b B
b'
Y' a
弧矢慧差
入瞳
K s ' Yc 'Yz ' Yd 'Yz '
Y' z B' z -K' s B' c B' d
d' z' d z c'
B' s
Y' z c
高斯 像面
Y' z
B
Y' z
图5.4
慧差的危害影响
11变化称为调制传递函数mtf高频部分反映了物体的细节中频部分反映了物体的层次低频部分反映了物体的轮廓光学传递函数的概念将每一视场点的物体分解为所有频率的余弦物体并求出其理想像以理想像的对比度作为参考实际像的对比度与理想像的对比度的比值为该频率的传递函数值将各种频率的传递函数值作成曲线反映了该视场的成像质量传递函数不能反映光学系统的畸变光学传递函数的评价方法用mtf曲线评价成像质量所有频率用特征频率传递函数值评价光学系统的质量根据光学系统使用目的用mtf阈值进行成像质量评价分辨率用mtf曲线的积分值来评价成像质量中心点亮度用mtf曲线族来进行
光学系统的计算机辅助装调
13
14
15
实验结果
16
17
18
19
20
21
22
发表的论文
• Computer-aided alignment of the complex optical
system. Zhang.B, Zhang.X.H, Wang.C, SPIE 4231(2000): 67
• 离轴非球面三反射镜光学系统装调中计算机
3
• 1981年,NASA • 1989年Santa Barbara 研究中心 • 1988年,Arizona大学 • 俄罗斯、日本、保加利亚以及法
国也相继地在这方面进行了研究。 • 国内在这方面的研究刚刚起步[5]。
4
• 可应用于较为广泛的对象上。 • 可将光学系统调整至最佳的使用状态。 • 使装调理论有一个较好的发展。
34
35
36
3、数值模拟
37
5
二、研究方案
6
• 数字化采集和数据分析处理 • 逆向优化算法的研究 • 实验验证
7
三、前期工作
• 干涉图检验定性装调工作已经完成。 • 装调软件已经初步建立,并进行了数字
模拟闭合运算 • 完成了部分实验工作 • 具备实验和进一步开展工作的能力
8
计算机模拟结果
(离轴三反ቤተ መጻሕፍቲ ባይዱ镜光学系统的数值模拟)
优化方法的研究。张斌,韩昌元,光学学报 (21) 1,2001:54
23
四、现正在进行的工作
• 二代详查相机的前期工作 • 极紫外投影光刻光学系统的前期工作
24
五、参加人员
•王 成 • 韩昌元 • 张晓辉 • 金春水 •马 军 • 张圣华