基于GPS的校园巡航定位系统模型设计
校园智能GPS导航及信息服务系统应用分析

校园智能GPS导航及信息服务系统应用分析作者:李海艳来源:《中国信息化》2018年第05期一、引言校园是大学生日常活动的主要空间,大学校园通常具有面积大、开放性强、建筑布局分散、各类设施复杂等特点。
校园地理信息相对来说比较复杂,各类校园信息越来越难在纸质地图上进行详细的表示。
各高校每年都会招收一批新生,而且随着校园的扩建以及对外交流的增多,越来越多的校外人员来到高校校园内参观。
这些人对校园不是很熟悉,他们需要花时间去熟悉校园内部构造。
同时,随着高等教育规模的扩大,很多校老校区变得拥挤不堪,制约了学校发展,新校区应运而生。
比如安徽理工大学,在2016年前学校还分为本部、北校区和西校区,而现在全体师生均已搬迁到山南新校区。
随着互联网技术的发展,网络资源利用率得到大幅提升,GPS导航系统的使用也越发广泛。
像百度地图、高德地图,打破了传统纸质地图的限制,存储的信息量比传统的纸地图要大得多,查询起来更快速直观,而且也符合时代的发展趋势。
所以,应用校园智能GPS导航及信息服务系统已经成为必然,其能够降低工作量,大大提高查询效率,有助于高校学生及来访人员快速、完整、形象地了解校园地理布局及主要信息。
二、可行性分析目前,高校应用校园智能GPS导航及信息服务系统对校园景况进行管理占据少数。
但对于高校而言,应用该系统对于高校自身发展具有重大帮助。
可行性分析是以调查数据为基础,根据用户对校园智能GPS导航及信息服务系统的实际需求来进行的研究与分析。
对该系统的可行性分析主要从以下几个方面展开:(一)经济可行性随着高校校园规模的逐渐扩大,每年新建建筑或者搬迁,不仅加大了校内师生对校园信息及时掌握的难度,同时也不利于高校对校园地理布局信息的公开。
每次校园信息的更新,都需要一定的成本进行支持,并且校园信息的更新速度是非常迅速的。
但是校园智能GPS导航及信息服务系统成本小,维护费用低,降低了定位困难,方便用户对校园进行局部或者全景浏览,快速的熟悉校园。
基于GPS定位模块制作高精细校园地图
自身实时定位 地图加载 路线导航 图 1 系统功能结构图
校内搜索
⑴ 自身定位功能
1 API 接口
现如今,有越来越多的地图应用程序在市场上熟的地图 API 接口也被各 行各业广泛使用,例如福建省农业科学院农业生物资 源研究所研究的土壤标本地理分布信息系统[1] ,而我 们开发的系统就是采用的高德地图 API 接口。高德地 图 API 可以为开发者免费提供基于高德地图的应用程 序接口。我们只需申请密钥,然后填写开发者信息, 即可利用高德平台上的资源进行开发。
计算机时代 2018 年 第 2 期
· 55 ·
DOI:10.16644/33-1094/tp.2018.02.015
基于 GPS 定位模块制作高精细校园地图*
张紫甜,古丽米拉·克孜尔别克
(新疆农业大学计算机与信息工程学院,新疆 乌鲁木齐 830000)
摘 要:以大学的空间信息为基础,采集学校的地理信息,利用高德地图免费接口,实现了基于高德地图 API 的高精细校
2 系统的需求分析总体设计
本系统是以新疆农业大学为例,研究校园内部分 师生用户对校园地图导航系统的需求,并根据其需求 提供了相应的功能。主要包括:校园内详细地图的显 示,能有效的帮助学校内部的师生了解校园内的各个
收稿日期:2017-12-13 *基金项目:新疆农业大学自治区级大学生创新项目(201710758115)
文献标志码:A
文章编号:1006-8228(2018)02-55-03
Making high precision campus map with GPS positioning module
Zhang Zitian, Gulimila·Kezierbieke
(College of computer and information engineering, Xinjiang agricultural university, Urumqi, Xinjiang 830000, China)
基于GPS定位信息系统的设计与实现 毕业设计
本科毕业设计(论文)题目:基于GPS定位信息系统的设计与实现学号: *****XXXXXXX姓名: XXXX 班级: XXXXX 专业:电子信息工程学部(院):工学部入学时间: XXXX 级指导教师: XXXX日期: 2017年 X月X日上海第二工业大学本科毕业设计(论文)毕业设计(论文)独创性声明本人所呈交的毕业论文是在指导教师指导下进行的工作及取得的成果。
除文中已经注明的内容外,本论文不包含其他个人已经发表或撰写过的研究成果。
对本文的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:基于GPS定位信息系统的设计与实现摘要随着无线导航定位技术、网络技术、计算机通信技术、自动化和人工智能系统的飞速发展,使得GPS在很多领域都因其独特的优点而得到广泛应用,如广泛应用在土建测量、车辆查询与监控、工程测量、航空摄影测量、地壳运动监测、个人旅游及野外探险、紧急救助、飞机、轮船、车辆的导航与定位等各个领域,定位服务市场得到空前发展,目前市场上也存在一些定位系统绕开了无GPS 卫星定位系统信号的问题,使用蓝牙、射频识别、ZigBee、WIFI等技术,这些技术虽然可以提供较高精度的定位,但其不足之处在于只能应用在特定的设备上和特定的环境中,不仅安装复杂、费用高,而且应用范围狭隘。
如何扩大定位系统服务的应用范围,降低定位系统的部署成本,提高设备的利用率,使得定位系统应对突发事件的救援能力得以增强,在现实中具有非常重要的意义。
本设计是基于嵌入式系统和GPS模块等部件设计的一款定位信息系统,将接收到的数据进行读取和处理并将接收到的定位信息显示在液晶显示屏上,通过WIFI实现对定位信息数据的传输,其中WIFI选用ESP8266芯片,在硬件设计中,起通信桥梁的作用,通过HTML实现web网页在PC机端的定位信息的管理。
关键词:GPS;定位服务;液晶显示;WIFI;ESP8266Design and Implementation of LocationInformation System Based on GPSABSTRACTWith the rapid development of wireless positioning technology, wireless network, computer, automation and intelligent system makes the GPS in many fields because of its unique advantages and is used in various fields widely, such as land and engineering surveying, photogrammetry, crustal movement monitoring, engineering deformation monitoring, and personal rescue, and vehicles, aircraft, ship navigation and so on. Positioning market has been an fast development. There are some positioning systems without the satellite positioning system signal which use Bluetooth, frequency identification, ZigBee, WIFI and other technologies. Not only can these technologies provide high precision positioning but its shortcomings used in specific equipment and specific environment. What’s more, complicated installation, high cost, and narrow range make its applications are limited. What is important to enlarge the application industry and the scope of the location service, to reduce the deployment cost, improve the utilization ratio of the equipment and enhance the ability of emergency, How to expand the scope of application of positioning system services, reduce the deployment cost of positioning system, improve the utilization of equipment, making the positioning system responded to emergencies can be enhanced, which has a very important significance in reality.The design is based on embedded systems and GPS modules and other components designed a positioning system,The received data is read and processed and the received positioning information is displayed on the liquid crystal display screen, and the transmission of the positioning information data is realized by the WIFI which selects the ESP8266 chip, and design the hardware, WIFI plays a role in bridge through the web page manage the computer information.Key words: GPS; Location service; LCD; WIFI; ESP8266目录1绪论 (1)1.1本课题设计的背景 (1)1.2本课题的研究目的与意义 (1)1.3本课题的设计内容 (2)2系统定位方案的总体设计 (3)2.1定位信息系统的简介 (3)2.2定位信息系统的结构设计 (3)2.3定位信息系统的功能 (4)2.4系统软件开发环境的选择 (5)3系统硬件电路的设计 (6)3.1系统硬件整体设计 (6)3.2主控制模块 (6)3.2.1微处理器 (6)3.2.2液晶显示屏 (7)3.2.3电源 (8)3.3ESP8266芯片 (9)3.4GPS模块 (9)3.5串口电路 (11)4系统软件的设计与实现 (13)4.1软件的整体设计流程 (13)4.3串口通信程序设计 (15)4.3GPS数据接收程序设计 (16)4.4WIFI数据传输程序设计 (18)4.4.1WIFI的串口AT指令 (18)4.4.2WIFI的热点设计 (19)4.5Web服务网页的设计与实现 (20)5系统功能测试 (22)5.1系统硬件测试 (22)5.1.1GPS模块的测试 (22)5.1.2WIFI模块的测试 (25)5.2系统软件测试 (25)5.3系统最终实现的功能 (25)5.4实验结果及分析 (26)6结束语 (29)6.1小结 (29)6.2展望 (29)参考文献 (32)附录 (33)1绪论1.1本课题设计的背景GPS定位技术是目前正在快速发展中的最具有开创意义的高新技术之一,与此同时数据处理技术也在一直不断更新的状态之中,各系列、型号的GPS接收机生产厂商研制的处理软件各自具有各自不同的特色。
基于gps定位、追踪和调度系统设计及实现

Base on the locating feature we can develop many valuable services like speeding alert, stop alert, geofence alert and finding the closest target by a given address. Since we can know the address and time of the target, we can dispatch the target with high precision.This article analyses and designs a high performance hash file store system to store GPS data. It has four times write speed and more than one time read speed comparing to Oracle database. It implements a mechanism, which lets two machines backup each other. Also it has the ability to extend to a cluster. The store system adopts some new techniques like nonblocking IO, thread pool, task queue and so on. We also design an alert server to calculate the alert. This sub system includes a primary and a slave server. We also design a RGC server, which adopts map partition technique to cache the address. We also design a mileage server. At last we successfully merge these several servers (GPS data relative) to one server. This article analyses and designs a web sub system and a web service sub system. In web sub system it adopts AJAX (asynchronous JavaScript and XML) technique to improve user experience. In web service sub system the article focuses on how to use Axis to quickly expose the function to a web service .At the end,the article emphasizes how to test the system and analyses the test result, it analyses the performance issue of sub systems and gives improving solutions.KEY WORDS:locating system, tracking system, dispatching system, GPS application, mobile form, web service application上海交通大学学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
校园无人机自动巡航检测系统设计
校园无人机自动巡航检测系统设计随着无人机技术的快速发展,无人机在各个领域应用越来越广泛。
然而,在校园环境中,无人机的使用也存在着一些潜在的安全风险和隐私问题。
为了确保校园的安全与秩序,设计一套校园无人机自动巡航检测系统是非常必要的。
一、需求分析该校园无人机自动巡航检测系统需要满足以下需求:1. 实时检测:系统能够实时监测校园内的无人机活动,并能快速识别无人机的型号和身份。
2. 自动巡航:系统能够自动巡航校园内的关键区域,对无人机进行监控与打击。
3. 多传感器融合:系统能够利用多种传感器技术,如雷达、红外线、光学摄像头等,对无人机进行全方位的监测。
4. 数据分析与报警:系统能够对收集到的数据进行分析,发现异常行为并生成报警信息,及时通知相关工作人员进行处理。
5. 隐私保护:在满足安全监控的前提下,系统需要遵守相关隐私保护法律法规,确保校园内师生的隐私权不受侵犯。
二、系统设计针对以上需求,校园无人机自动巡航检测系统的设计如下:1. 硬件设备:系统主要包括无人机巡航器、传感器装置、监控控制中心和报警设备。
(1)无人机巡航器:具备自主飞行能力和遥控操控功能,能够在预设航线上进行巡航,并根据监测到的无人机信息进行相应的响应。
(2)传感器装置:采用多种传感器技术,如雷达、红外线传感器、光学摄像头等,用于实时监测校园内的无人机活动,并收集相关数据。
(3)监控控制中心:用于接收监测到的数据并进行处理与分析,进行无人机的自动巡航控制,并生成报警信息。
(4)报警设备:通过声音、灯光等方式及时发出警报,通知相关工作人员进行处理。
2. 系统工作流程:(1)无人机监测与识别:通过传感器装置对校园内的无人机进行监测,并利用图像识别和数据处理技术,识别无人机的型号和身份。
(2)无人机自动巡航控制:根据监测到的无人机信息,系统自动控制无人机巡航器进行巡航,保持对无人机的追踪和监控。
(3)行为检测与报警:通过对收集到的监测数据进行分析,识别无人机的异常行为,如悬停、低空越界等,生成相应的报警信息。
基于μC/OS-Ⅱ的校园GPS导航系统的设计与实现
Ke r s c mp s a i a o y tm; a u p  ̄ OS f y wo d : a u vg t n sse c mp sma ;p n i C/ —l OS GP e ev r ; S r c i e
早 期 高 校 校 同 面 积相 对 较 小 , 校 的教 学 区 , 活 区 , 校 的各 个 部 门都 相 对 集 中 , 校 同 一 个 区 域 到 5 一 学 生 学 从 个区 域 只需 要 很 短 的 时间 . 门的 搬 迁 也 能 存 同一 栋 或 相邻 的两 栋 之 间 , 部 即使 导 航 出错 , 来 的 负 面 影 响 也 相 对较 小 。校 同 导航 本上 采 片平 面 示 带 j
UA RT, 4通 道 DMA, 4通 道 P WM 定 时 器 , O 端 V , T 8通 道 l I / I R C, 0位 ADC 和 触 摸 屏 接 口 ,I IC总 线 接 口 ,1 IS总 线 接n e h o g o u r o l ea dT c n l y电脑 知识 与技术 eK d o
Vo . , 0 Ap i 2 1 P .41 —2 7 2 21 1 No 1 , rl 0 0. P 2 6 41 , 4 6
基 于  ̄ / 一Ⅱ的校 园 GP C OS S导 航 系统 的设 计与 实现
Ab ta t sr c:Th ytm a e ess e tk sARM rc s ra d  ̄ OS一 Ⅱ a pafm1 h o g h S rcie o o ti S ifmat n p o es n o C/ s lt o .tru h t eGP eev rt ban GP no a o .Af r i t e
校园导航定位系统课程设计

校园导航定位系统课程设计一、课程目标知识目标:1. 理解并掌握校园导航定位系统的基本原理与功能;2. 学习并运用相关的地理信息系统(GIS)知识,进行校园地图的解读与分析;3. 了解全球定位系统(GPS)及其在校园导航中的应用。
技能目标:1. 能够运用校园导航定位系统,进行校园内位置信息的查找与路径规划;2. 培养学生团队协作能力,通过小组讨论、分享,共同解决校园导航中遇到的问题;3. 提高学生的实际操作能力,学会使用相关设备和技术进行定位与导航。
情感态度价值观目标:1. 培养学生对地理信息科学的兴趣,激发学生探索未知、勇于创新的精神;2. 强化学生的环保意识,倡导绿色出行,提高学生对校园环境的保护意识;3. 培养学生热爱学校、关爱他人的情感,提高学生社会责任感。
本课程针对中学生设计,结合学科特点,以实用性为导向,充分考虑学生年龄特点和认知水平。
通过本课程的学习,使学生能够将所学知识应用于实际生活,提高解决问题的能力,同时培养良好的情感态度价值观。
课程目标具体、可衡量,为后续教学设计和评估提供明确方向。
二、教学内容1. 校园导航定位系统原理介绍- 导航定位技术的发展背景与现状- 校园导航定位系统的组成与工作原理2. 地理信息系统(GIS)知识- 校园地图的基本要素与解读- GIS在校园导航中的应用3. 全球定位系统(GPS)应用- GPS的原理与功能- GPS在校园导航中的实际应用4. 实践操作与案例分析- 校园导航定位设备的认识与使用- 实际操作:校园内路径规划与导航- 案例分析:解决校园导航中遇到的问题5. 团队协作与讨论分享- 小组讨论:探讨校园导航定位系统的优缺点- 分享经验:介绍个人在校园导航中的实用技巧教学内容依据课程目标,结合教材章节,确保科学性和系统性。
教学大纲明确,教学内容安排合理,注重理论与实践相结合,充分调动学生的积极性与参与度。
通过本章节的学习,使学生深入理解校园导航定位系统的相关知识,提高实际操作能力。
基于GPS技术的校园导览系统设计与实现
基于GPS技术的校园导览系统设计与实现导言:随着全球定位系统(GPS)技术在各个领域的应用不断增加,校园导览系统的设计和实现也成为许多学府关注的重点。
本文将探讨基于GPS技术的校园导览系统的设计原理、功能实现以及展望其未来发展的前景。
一、GPS技术简介全球定位系统(GPS)是一种通过卫星和地面站点网络来确定地球上某个特定位置的技术。
它由美国国防部开发并于1994年开始向公众开放。
GPS系统由三个部分组成:卫星系统、控制和用户段。
卫星系统负责发送信号,控制段用于跟踪和控制卫星,用户段则是使用GPS 设备的用户。
二、校园导览系统设计原理基于GPS技术的校园导览系统的设计原理包括以下几个方面:1.位置定位与轨迹跟踪校园导览系统利用GPS设备获取用户的精确位置信息,并对其位置进行定位和跟踪。
通过实时跟踪用户的位置,校园导览系统可以提供准确的导航服务。
2.地图数据管理与展示校园导览系统需要收集和管理校园地图的数据,并将其展示给用户。
这些地图数据可以包括建筑物、道路、景点等信息。
系统可以通过地图展示功能,帮助用户更好地理解和探索校园环境。
3.路径规划与导航校园导览系统可以根据用户的目的地和当前位置,进行路径规划和导航。
系统可以计算出最短路径或最优路径,并通过语音导航或图像指示等方式引导用户前往目的地。
三、基于GPS技术的校园导览系统的功能实现基于GPS技术的校园导览系统可以实现多种功能,以下是其中几点:1.位置定位与实时更新校园导览系统能够准确地定位用户的位置,并实时更新用户的位置信息。
通过这些信息,用户可以方便地找到自己所在的位置,并确定自己的行动方向。
2.导览和导航功能校园导览系统可以提供导览和导航功能,帮助用户找到校园内的各个地点,如教学楼、图书馆、食堂等。
用户只需输入目的地,系统将计算并指导用户沿最佳路径前往。
3.语音提示与可视化指引校园导览系统可以通过语音提示和可视化指引,向用户提供详细的导航信息。
校园导航系统的设计与实现
设计与实现一个校园导航系统可以分为以下几个主要步骤:
1. 需求分析
确定系统功能:如地点搜索、路线规划、实时位置追踪、语音导航、周边设施查询等。
用户角色:包括学生、教师、访客等,考虑不同用户群体的特殊需求。
2. 系统架构设计
地图数据获取与处理:可能需要与地图API(如高德地图、百度地图等)进行对接,获取校园内建筑物、道路、公共设施等地理信息,并将其导入到系统中。
位置服务模块:利用GPS或其他室内定位技术提供用户的实时位置信息。
导航算法:设计路径规划算法,根据地图数据计算出两点间的最短或最优路径。
后台管理系统:用于管理地图信息、发布通知公告以及处理用户反馈。
3. 前端界面设计
易用性:简洁明了的地图展示界面,明确的起点和终点输入框,清晰的导航指引箭头,以及声音提示等功能。
反馈机制:设计用户评价和反馈功能,以便不断优化和完善导航服务。
4. 后端开发
数据接口开发:为前端提供获取地图数据、规划路径等API接口。
服务器部署:确保系统的稳定运行和高效响应。
5. 测试与优化
功能测试:确保各个功能模块都能正常工作,路径规划准确无误,实时位置更新及时。
性能测试:在高并发情况下验证系统的稳定性,优化响应速度和资源占用。
用户体验测试:收集用户使用反馈,持续改进界面交互和导航精确度。
6. 上线与维护
系统上线后持续监控运行状态,定期更新地图数据,修复已知问题,添加新功能以满足更多需求。
通过以上步骤,可以逐步设计并实现一个完整的校园导航系统,服务于广大师生及访客,提高校园生活的便利性和效率。
校园gps控制网设计实验报告
校园gps控制网设计实验报告一、引言随着信息技术的发展,校园里的定位和导航需求越来越多。
为了满足校园内教职工和学生的定位导航需求,我们设计了一套校园GPS控制网系统。
该系统通过GPS定位技术,可以实时获取校园内各个位置的坐标信息,并将其展示在地图上,以方便用户查找目的地。
本实验报告将详细介绍我们的设计方案和实验过程。
二、设计方案1. 硬件设备我们使用了一台GPS接收器和多个支持网络通信的终端设备。
GPS 接收器用于接收卫星信号,并能够准确地获取到当前设备所在位置的经纬度信息。
终端设备则通过网络连接到服务器,将获取到的位置信息上传至服务器。
2. 软件设计我们使用了一套完整的软件系统,包含前端和后端两部分。
前端部分负责展示地图和进行用户交互,后端部分负责接收终端设备上传的数据,并将坐标信息进行处理和存储。
前端部分使用了HTML、CSS和JavaScript来设计网页界面,并使用了地图API来显示校园地图。
用户可以在网页上输入目的地信息,然后系统会根据当前位置和目的地,计算出最优的路径,并在地图上标注出来。
同时,前端还可以将用户的当前位置实时更新在地图上,以便用户随时查看自己的位置。
后端部分使用了Java编程语言,通过Spring框架搭建了一个服务器,用于接收终端设备上传的位置信息。
服务器会将这些位置信息进行处理和存储,以便用户在前端查看地图时获取最新的位置数据。
另外,后端还实现了一系列算法,用于计算最优路径和生成路径规划。
三、实验过程1. 硬件连接首先,我们将GPS接收器通过串口连接到终端设备。
然后,将终端设备连接到服务器。
确保硬件连接正常后,我们进一步进行软件配置。
2. 软件配置我们首先在终端设备上安装前端软件,包括HTML、CSS和JavaScript 文件。
然后,将后端软件部署到服务器上。
确保软件配置完成后,我们启动系统,以便进行实际测试。
3. 实际测试我们邀请了一些志愿者来参与测试。
志愿者携带终端设备,通过前端界面输入目的地信息,并在地图上查看自己的位置。
gps定位毕业设计
gps定位毕业设计GPS定位毕业设计随着科技的不断发展,GPS定位技术已经成为现代生活中不可或缺的一部分。
无论是导航、交通、物流还是个人定位,GPS定位都发挥着重要的作用。
因此,对GPS定位技术的研究和应用也越来越受到人们的关注。
在我即将毕业的大学生活中,我选择了GPS定位作为我的毕业设计课题。
首先,我将介绍GPS定位技术的原理和应用。
GPS定位是通过卫星定位系统来确定地球上某一点的位置。
全球定位系统(GPS)由一组卫星、地面控制站和用户接收设备组成。
卫星发射无线电信号,接收器接收这些信号并计算出接收器与卫星之间的距离,从而确定接收器的位置。
GPS定位技术广泛应用于交通导航、航空航海、地质勘探等领域。
接下来,我将讨论GPS定位在毕业设计中的应用。
我的毕业设计是基于GPS定位技术的智能导航系统。
这个系统可以帮助用户快速准确地找到目的地,并提供实时路况信息和最佳路线推荐。
为了实现这个系统,我将使用GPS接收器、地图数据和交通信息等多种技术和数据源。
通过对这些数据的处理和分析,我将设计出一个具有高精度和高效性的导航系统。
在毕业设计的研究过程中,我遇到了一些挑战。
首先是数据的收集和处理。
为了设计一个准确可靠的导航系统,我需要收集大量的地图数据和实时交通信息。
这些数据的获取和处理需要耗费大量的时间和精力。
其次是算法的设计和优化。
为了实现高精度和高效性,我需要设计一些复杂的算法,并对其进行不断的优化和改进。
这需要我具备扎实的数学和计算机技术基础。
在毕业设计的实践过程中,我也收获了很多。
首先,我学会了如何使用GPS接收器和地图数据进行定位和导航。
这让我对GPS定位技术有了更深入的了解。
其次,我提高了自己的问题解决能力和团队合作能力。
在遇到困难和挑战时,我能够主动寻求解决方案,并与同学们一起合作解决问题。
最重要的是,我培养了对科研和创新的兴趣和热情。
通过毕业设计,我深刻体会到科研的重要性和乐趣,也为将来的学习和工作打下了坚实的基础。
高校校园导航系统设计与实现
高校校园导航系统设计与实现1. 引言随着国内高校的不断发展和扩建,校园面积逐渐增大,校园内建筑和设施不断增多,学生在校园内的迷失和找不到目的地的情况也逐渐增多。
为了解决这一问题,高校需要设计和实现一种高效、准确的校园导航系统,帮助学生和访客快速找到目的地。
2. 设计目标2.1 提供准确的定位服务:导航系统需要利用全球定位系统(GPS)和WiFi等技术,为用户提供准确的校园定位服务,并能够实时更新位置信息。
2.2 显示详细的建筑和设施信息:系统需要在地图上显示高校内的所有建筑和设施,并提供详细的信息,如建筑名称、功能描述、开放时间等,以满足用户的各种需求。
2.3 支持多种导航模式:除了提供步行导航外,系统还应该支持骑行、驾车等多种导航模式,根据用户的需求,选择最合适的导航方式。
2.4 提供导航提示和路径规划:导航系统需要向用户提供清晰的导航提示,并能够根据用户选择的目的地自动规划最优路径,考虑到用户的出行速度、交通拥堵情况等因素。
3. 系统实现3.1 数据收集和整理:校园导航系统需要收集和整理校园内建筑和设施的相关数据,包括建筑名称、位置信息、功能描述等。
可以借助高校的信息化建设,将这些数据统一管理。
3.2 地图绘制:系统需要将校园内的建筑和设施显示在地图上,可以使用标准的地图绘制工具,如OpenStreetMap 或Google地图API。
地图需要清晰明了,用户可以放大缩小地图,查看不同区域的详细信息。
3.3 位置定位和更新:系统需要利用GPS和WiFi等技术实现用户的定位服务。
用户打开导航系统后,系统会自动获取用户当前的位置信息,并实时更新位置,以确保准确导航。
3.4 导航算法和路径规划:在用户选择目的地后,系统需要根据用户当前位置和目的地,自动规划最优路径。
导航算法可以使用A*算法或Dijkstra算法等,考虑到校园道路的拓扑结构、交通拥堵情况等因素,计算最短路径和最快到达时间。
3.5 导航提示和语音导航:系统需要根据用户当前位置和目的地,向用户提供清晰的导航提示,如前方左转、直行500米等。
基于ARM的中南民族大学校园gps的系统设计.ppt

一、系统功能总体分析
这个系统主要实现的功能是通过 GPS 信号接收模块 获取终端当前位置的GPS 卫星信号,由GPS 数据处 理模块处理,获得当前位置的准确定位信息(包括 经纬度、高度、速度、方向和时间等);由GPS 地 图处理模块负责读取保存在存储介质中的矢量数字 学校的地图,并进行坐标、投影等相关转换处理, 最后将学校地图绘制到显示设备中;GPS 数据处理 模块输出的定位信息可以在数字地图上直观地显示 出当前位置,起到可视化定位导航的目的;用户同 时可以在地图浏览模式下对地图进行平移和缩放等 操作来查看地图。系统提供图形用户界面GUI,在 屏幕上以图形化的方式显示学校地图和数据,提供 给用户人机交互接口
4.GPS基带处理器部分 进行数字信号处理的相关器单元和进行导航应用计算的嵌入式处理单元。 5.存储模块 6.调试与通信接口
接收机中设计了两种接口:一种是JTAG调试接口,连接 JTAG仿真器:另一种是RS232 通信串口,用于与主机通信 7.键盘电路 8.电源及复位电路
二 软件设计
1.操作系统和开发平台的选用
得的人k时刻在矢量地图道路上的对应点,简称g(k)的匹配点。匹配点所在矢
量地图弧段Si上的位置,应该尽可能反映出实际人在该段道路上的相应位置。
3) e(k)为g(k)的地图匹配修正量,表示g(k)与其匹配点p(k)间的误差修正。需
要指明匹配点所在的弧段p(k) .Si 时,使用符号e(k)[Si ] 表示g(k)对于弧段Si
3.射频前端 其为信号变频模块其中的基准频率振荡器为GPS接收机提供时间和基 准频率,它的输出通往频率合成器,产生本振频率与系统时钟信号, 然后一个或多个本振频率信号与射频信号进行混频,完成射频信号到 中频率信号的变换,同时将中品信号放大并进行模数转化,并通过抽 样频率对该中频信号进行抽样,一边后续数字化处理。
基于GPS定位技术的智慧校园管理系统设计
基于GPS定位技术的智慧校园管理系统设计第一章:概述随着科技的不断进步,智慧校园管理系统的设计和应用已经成为现代校园发展的必然趋势。
这种系统主要采用GPS定位技术,结合物联网和云计算等技术,实现对校园内各种资源和设备的全面管理和监控,提高校园的安全性、便捷性和管理效率。
第二章:系统架构智慧校园管理系统的整体架构通常包括三个主要部分,即后台管理系统、移动端APP和校园内设备的监控与管理系统。
其中,后台管理系统是整个系统的核心,负责数据的收集和分析,实现系统功能的完整,同时保障其高可用性和安全性。
移动端APP则是为学生和教职员工提供方便的服务工具,通过移动设备或者终端设备的操作,实现对校园资源和设备的查找、预定、管理和控制。
校园内设备的监控与管理系统是指设备端应用程序,负责维护设备的状态信息,并与后台管理服务通信,实现设备的动态管理和控制。
第三章:系统功能智慧校园管理系统的主要功能包括:1. 学生考勤管理:基于GPS定位技术和身份识别技术,实现对学生的考勤管理和监控,自动记录学生出勤和考勤情况,提高考勤效率和准确度。
2. 资源预定和管理:通过移动端APP,使学生和教职员工能够方便地预定和管理校园内各种设施和资源,包括教室、会议室、图书馆书籍等。
3. 课表管理:为学生和教职员工提供方便的课表管理工具,通过移动端APP实现课表查询、修改和管理。
4. 校园导览:利用GPS定位技术和地理信息系统,为学生和教职员工提供校园内导航服务,快速定位各种校园资源和设施的位置。
5. 校园安防监控:利用监控设备和基于视觉识别技术的智能警报系统,实现对校园内极端事件的预警和迅速反应,提高校园的安全性。
6. 校园环境监测:通过物联网技术,实现对校园内各种环境指标的实时监控和预测,提高校园环境的质量。
第四章:系统实现在实现智慧校园管理系统时,往往需要考虑以下技术点:1. GPS定位技术的实现:需要根据校园内的GPS信号分布特点,选择合适的GPS设备和接收设备。
GPS实时型校园巡更巡检方案

GPS实时型校园巡更巡检方案近期我国学校突发公共安全事件,校园安全首次上升到国家高度安保警戒升级,加强安全防范工作,落实整改措施,加强门卫工作,迅速组织校内安全巡逻,在重点部位、重点时段增加巡逻力量、加大巡逻力度。
针对校区、教学楼、宿舍、实验楼、图馆巡检巡更的需求石家庄智创科技研发的GPS 实时型巡检管理系统为实现巡检人员的有效监督管理提供了简单有效的方法,将保障学校安全,责任落实到人,查找安全隐患,提供一个科学化、信息化的巡检管理方式。
二、GPS巡检管理系统简介及组成GPS巡检管理系统借鉴了电子巡更系统成功的经验,将巡检点考核与GPS轨迹完美结合在一起,用虚拟坐标巡检点代替传统射频巡检点,这样可清楚看到巡检人员到达离开每一个巡检段的时间,使企业管理人员能清楚看到巡检人员的工作状况,能清晰显示整条线路巡检情况。
GPS巡检管理系统系统由手持终端(安卓手机)和管理平台组成。
三、GPS实时型巡检管理系统主要功能1、实时定位:巡检信息与事件记录信息可实时回传到服务器,使管理者能够实时看到巡检人员所到达的巡检位置及事件信息,不仅实现对巡检人员的监督管理还实现了实时性管理掌握设施信息及巡检信息2、轨迹回放:管理者可查看巡检人员的历史巡检情况,重现巡检现场情况。
3、巡检线路设置:管理者可以对巡检人员的巡检线路进行合理设置,最大限度上提高巡检工作的完成效率,降低巡检人员的工作强度。
4、报警处理:当巡检人员按下报警功能,管理平台在线状态可出现报警提示,或通过短信及通话方式通知管理者,管理者可第一时间对紧急情况做出相应处理,避免不必要事故的发生。
5、巡检观测:通过巡检人员回传的前方图片,可以使得管理者有效了解学校设施的情况,合理进行巡检指导,提高巡检工作的科学性。
6、用户管理:添加新用户,分配权限。
7、考勤设置:设置巡检人员的巡检线路或巡检点自动生成考勤。
四、GPS实时型巡检管理系统特点1、设备采用GPS卫星定位,无需布点,人员位置定位信息更精确,选用专业巡检器,巡检系统GPS卫星定位精度在5-20m。
基于GPS定位模块制作高精细校园地图

基于GPS定位模块制作高精细校园地图作者:张紫甜古丽米拉·克孜尔别克来源:《计算机时代》2018年第02期摘要:以大学的空间信息为基础,采集学校的地理信息,利用高德地图免费接口,实现了基于高德地图API的高精细校园地图导航APP。
开发中充分利用了高德地图 API 接口,实现了自身定位、地图加载、校园内地点搜索和路线导航等功能。
该APP方便学校师生及外来人员找寻在校园内的任何地点,能有效缓解新生入校找不到各个报名点而造成的校园拥挤的情况。
关键词:校园导航;自身定位; GPS;高德地图API;路径规划中图分类号:TP302 文献标志码:A 文章编号:1006-8228(2018)02-55-03Abstract: Based on the spatial information of the University, to collect the geographic information of the school and make use of the free interface of Amap API, an APP of high-precision campus map navigation is realized. In the development, the API interface is fully utilized to realize the functions of self positioning, map loading, campus location search and route navigation. The APP facilitates school teachers, students and the external personnel, to find anywhere in campus,which can effectively alleviate the situation of campus congestion caused by the new students who cannot find their registration points.Key words: campus navigation; self positioning; GPS; Amap API; path planning0 引言国内各大高校快速发展,校园内部的教学楼、宿舍楼、大小食堂、各学院楼、实验楼等地理位置错综复杂,即使在学校工作生活多年的教职工以及进校多年的学生,也未必能清楚的对学校各地方清楚的了解,对于刚入学的大一新生或者来访的外来人员更是有许多不便之处。
基于智慧校园的巡逻机器人导航定位技术研究
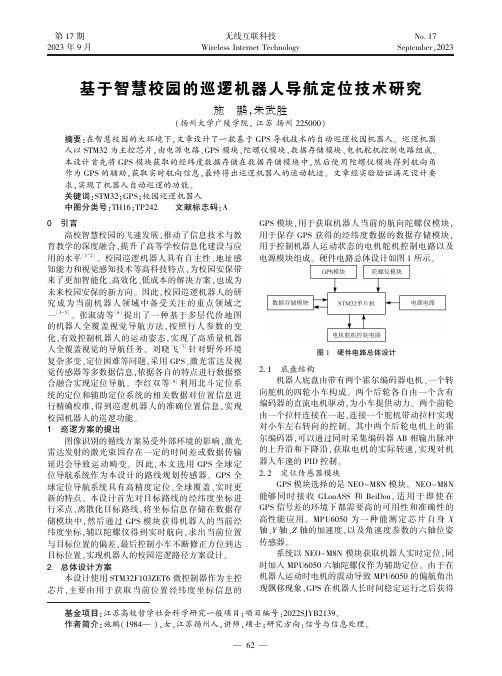
第17期2023年9月无线互联科技Wireless Internet TechnologyNo.17September,2023基金项目:江苏高校哲学社会科学研究一般项目;项目编号:2022SJYB2139㊂作者简介:施鹏(1984 ),女,江苏扬州人,讲师,硕士;研究方向:信号与信息处理㊂基于智慧校园的巡逻机器人导航定位技术研究施㊀鹏,朱武胜(扬州大学广陵学院,江苏扬州225000)摘要:在智慧校园的大环境下,文章设计了一款基于GPS 导航技术的自动巡逻校园机器人㊂巡逻机器人以STM32为主控芯片,由电源电路㊁GPS 模块㊁陀螺仪模块㊁数据存储模块㊁电机舵机控制电路组成㊂本设计首先将GPS 模块获取的经纬度数据存储在数据存储模块中,然后使用陀螺仪模块得到航向角作为GPS 的辅助,获取实时航向信息,最终得出巡逻机器人的运动轨迹㊂文章经实验验证满足设计要求,实现了机器人自动巡逻的功能㊂关键词:STM32;GPS ;校园巡逻机器人中图分类号:TH16;TP242㊀㊀文献标志码:A 0㊀引言㊀㊀高校智慧校园的飞速发展,推动了信息技术与教育教学的深度融合,提升了高等学校信息化建设与应用的水平[1-2]㊂校园巡逻机器人具有自主性㊁地址感知能力和视觉感知技术等高科技特点,为校园安保带来了更加智能化㊁高效化㊁低成本的解决方案,也成为未来校园安保的新方向㊂因此,校园巡逻机器人的研究成为当前机器人领域中备受关注的重点领域之一[3-5]㊂张淑清等[6]提出了一种基于多层代价地图的机器人全覆盖视觉导航方法,按照行人参数的变化,有效控制机器人的运动姿态,实现了高质量机器人全覆盖视觉的导航任务㊂刘晓飞[7]针对野外环境复杂多变㊁定位困难等问题,采用GPS㊁激光雷达及视觉传感器等多数据信息,依据各自的特点进行数据整合融合实现定位导航㊂李红双等[8]利用北斗定位系统的定位和辅助定位系统的相关数据对位置信息进行精确校准,得到巡逻机器人的准确位置信息,实现校园机器人的巡逻功能㊂1㊀巡逻方案的提出㊀㊀图像识别的循线方案易受外部环境的影响,激光雷达发射的激光束因存在一定的时间差或数据传输延迟会导致运动畸变㊂因此,本文选用GPS 全球定位导航系统作为本设计的路线规划传感器㊂GPS 全球定位导航系统具有高精度定位㊁全球覆盖㊁实时更新的特点㊂本设计首先对目标路线的经纬度坐标进行采点,离散化目标路线,将坐标信息存储在数据存储模块中,然后通过GPS 模块获得机器人的当前经纬度坐标,辅以陀螺仪得到实时航向,求出当前位置与目标位置的偏差,最后控制小车不断修正方位到达目标位置,实现机器人的校园巡逻路径方案设计㊂2㊀总体设计方案㊀㊀本设计使用STM32F103ZET6微控制器作为主控芯片,主要由用于获取当前位置经纬度坐标信息的GPS 模块,用于获取机器人当前的航向陀螺仪模块,用于保存GPS 获得的经纬度数据的数据存储模块,用于控制机器人运动状态的电机舵机控制电路以及电源模块组成㊂硬件电路总体设计如图1所示㊂图1㊀硬件电路总体设计2.1㊀底盘结构㊀㊀机器人底盘由带有两个霍尔编码器电机㊁一个转向舵机的四轮小车构成㊂两个后轮各自由一个含有编码器的直流电机驱动,为小车提供动力㊂两个前轮由一个拉杆连接在一起,连接一个舵机带动拉杆实现对小车左右转向的控制㊂其中两个后轮电机上的霍尔编码器,可以通过同时采集编码器AB 相输出脉冲的上升沿和下降沿,获取电机的实际转速,实现对机器人车速的PID 控制㊂2.2㊀定位传感器模块㊀㊀GPS 模块选择的是NEO -M8N 模块㊂NEO -M8N 能够同时接收GLonASS 和BeiDou,适用于即使在GPS 信号差的环境下都需要高的可用性和准确性的高性能应用㊂MPU6050为一种能测定芯片自身X 轴㊁Y 轴㊁Z 轴的加速度,以及角速度参数的六轴位姿传感器㊂系统以NEO -M8N 模块获取机器人实时定位,同时加入MPU6050六轴陀螺仪作为辅助定位㊂由于在机器人运动时电机的震动导致MPU6050的偏航角出现飘移现象,GPS 在机器人长时间稳定运行之后获得的航向是稳定的,但是更新频率慢,因此对GPS 获得的航向与陀螺仪偏航角进行互补滤波,将滤波之后的值作为航向㊂3 软件设计㊀㊀软件总体设计如图2所示,由GPS 导航模块㊁陀螺仪模块㊁数据存储模块㊁运动控制模块组成㊂图2㊀软件程序总体设计3.1㊀各模块程序设计思路3.1.1㊀数据存储程序模块㊀㊀将GPS 获取得到的位置信息存入到单片机内部FLASH 中,保证数据在掉电情况下不丢失㊂对内部FLASH 的写入过程包括:解锁㊁页擦除和写入数据3个步骤㊂3.1.2㊀陀螺仪程序模块㊀㊀单片机通过I2C 通信协议与陀螺仪进行通信,将陀螺仪中获取到的原始数据读出,然后通过MPU6050内置的DMP 模块,采用四元数法将原始数据解算为可用的横滚角㊁俯仰角㊁偏航角㊂3.1.3㊀GPS 导航程序模块㊀㊀GPS 在传输数据的时候是由串口接收的,因此大量数据在串口传输时,如果使用单片机进行循环处理,将大大降低CPU 的效率,因此这里使用DMA 方式进行数据传输㊂3.1.4㊀运动控制程序模块㊀㊀机器人通过陀螺仪和GPS 获得当前航向,然后将当前航向与期望航向的偏差值输入PID 公式得到转向舵机和运动电机控制的PWM 脉宽㊂3.2㊀主程序设计思路㊀㊀先确定好目标路线,以直道20m㊁弯道10m 的间隔距离选定好若干个中间点,将目标路线离散化,然后通过按键控制将中间点处的经纬度坐标数据存入单片机的内部FLASH,保证在主板掉电的情况下坐标数据不丢失㊂当坐标数据采集完成之后,将陀螺仪获取到的偏航角进行转换,使其与GPS 航向坐标相统一,同时调整机器人的方向将陀螺仪MPU6050的初始化方向与地理正北方向对齐,完成陀螺仪与GPS 的坐标系对齐㊂然后通过按键控制开启定时器中断,机器人进入自动循线模式㊂通过GPS 获得当前机器人的经纬度数据,然后将目标点坐标经纬度与当前位置坐标经纬度进行计算,得到机器人当前位置与目标地点的期望方向角和距离㊂通过多次测试,同时考虑到GPS 获取数据时具有一定的延迟,本文选定前瞻距离为5m,即当前机器人的位置距离目标点的距离小于5m 时,自动将目标点坐标移动到下一个目标点㊂由于机器人在静止或者运行不稳定时GPS 无法获取准确的航向,而当机器人稳定行驶时GPS 的航向相对准确,同时考虑到MPU6050在电机的震动环境下,噪声累计误差会导致其获取的航向角出现误差㊂经过测试,MPU6050在机器人刚启动的一段时间获取的偏航角相对准确㊂因此,在机器人启动的前一段时间内采用陀螺仪的偏航角作为当前航向,当机器人稳定运行之后,对GPS 获得的航向与陀螺仪偏航角进行互补滤波,将滤波之后的值作为当前航向㊂最后在获取机器人当前坐标位置以及航向之后,计算出当前位置与目标位置的距离和方向角的差值,然后通过PID 算法控制机器人的电机速度以及舵机的打角向目标地点运动㊂软件总体流程如图3所示㊂图3㊀软件总体流程4㊀测试㊀㊀采用GPS 定位系统确定好巡逻目标路线如图4所示,根据路线的实际情况选定好若干个中间点,中间点选取直道20m,弯道10m 为间隔㊂然后通过按键将中间点的经纬度坐标数据存入单片机的内部FLASH㊂在数据存储完成之后,将陀螺仪的初始化方向与地理正北方向对齐,保证陀螺仪与GPS 的坐标系对齐㊂然后按下按键,陀螺仪开始初始化㊂在陀螺仪初始化完成之后,通过按键将机器人切换为巡线模式㊂在机器人上搭载实时采集的摄像头,得到的实时图像如图5所示㊂图4㊀巡逻目标路线5㊀结语㊀㊀本文设计的校园巡逻机器人采用GPS 导航系统获取坐标信息,在陀螺仪采集到的航向信息的辅助下,在校园中实现了自动巡逻的功能㊂经实验表明,机器人能够高效地完成指定目标路线的校园巡逻,在智慧校园环境下实现了安保工作的智能化㊂图5㊀摄像头模块采集的实时图像参考文献[1]郑超.基于人工智能的智慧校园建设框架及关键路径[J ].电脑知识与技术,2022(17):83-85.[2]张帆,黄巧洁,刘沛强,等.智慧校园的技术要求和发展趋势研究[J ].电视技术,2022(8):213-216.[3]未庆超,张曙光,曹忠尉,等.智能校园巡逻机器人的设计[J ].电子测试,2019(9):20-22.[4]王国杰,薛磊,赵凯.基于云平台的校园无人巡逻机器人远程智能控制系统设计[J ].邯郸职业技术学院学报,2021(4):51-55.[5]黄晓艳,夏轩.室外巡逻机器人巡检系统的研究[J ].中国建设信息化,2022(23):68-69.[6]张淑清,邓庆彪,蔡志文.安防巡逻机器人全覆盖视觉导航方法[J ].机械设计与制造,2022(12):264-268.[7]刘晓飞.野外未知环境下的巡逻机器人定位导航技术研究[C ].吉林:北华大学,2022.[8]李红双,李孝杰.一种基于北斗定位自主巡逻机器人的研究与试验测试[J ].机械设计,2020(增刊1):51-54.(编辑㊀李春燕)Research on localization and navigation technology of patrol robot based on smart campusShi Peng Zhu WushengGuangling College of Yangzhou University Yangzhou 225000 ChinaAbstract In the environment of smart campus a campus robot which can patrol by itself based on GPS is designed.Patrol robot takes STM32as the control core.It is composed of power supply circuit GPS module gyroscope module data storage module motor and steering engine control circuit.In this design First of all longitude and latitude data collected by GPS is stored in data storage module.Then real time heading information is acquired by gyroscope module and GPS.In this process course information is measured by gyroscope module.At last movement track of patrol robot is computed.The experimental results show that the robot has achieved the expected goal and realized the automatic cruise function.Key words STM32 GPS campus patrol robot。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于GPS的校园巡航定位系统模型设计【摘要】项目采用基于nmea-0183协议的gps模块作定位的数据采集部分,设计制作出一套能够实现校园定位的系统模型,为日后学校继续深入研究校园gps应用指明研究方向,奠定算法基础,以便日后加以改进后能正式投入应用,或应用于校园导航或应用于校园车辆监控。
【关键词】gps;校园巡航定位系统;设计
一、gps校园巡航定位系统硬件设计方案
我们设计了一套硬件系统,发送模块作为手持终端,接收模块接收手持终端传来的数据并送至pc,在pc软件界面中观察手持终端的位置信息,从而实现定位功能。
硬件设计方案如下图所示:(1)接收在线数据。
此模块通过打开现存在的串口,从而实时的接收下位机上传的定位数据。
对现有串口进行打开的时候,必须设置波特率,校验位,停止位等相关参数。
(2)接收离线数据。
此模块是用于读取已经采集的定位数据,只能进行离线数据的解析。
(3)提取经纬度。
软件只针对gprmc的定位信息进行解析,其他类型的定位信息过滤掉。
从而提取出有效的经纬度。
(4)显示位置。
通过提取到的有效经纬度,根据已知点的经纬度,从而计算出现有经纬度在地图上的位置,从而显示出来
二、项目研究过程中的难点及解决途径,应用的关键技术
1.硬件设计过程中遇到的问题及解决方法。
硬件程序设计中的难点是数据传输方面的问题,gps模块与单片机进行通信把信息数
据传入单片机,单片机把数据放入其外部缓存,无线数据传输模块再将数据从单片机缓存区中取出放入自己的数据寄存器然后打包
发送,这之间遇到的问题是数据传输过程中的格式问题。
nrf905在进行数据传输时是先把数据放入数组里再进行传输并且它只能以
十六进制的数据形式发送数据,而gps模块接收到的数据虽然是16进制的,但没有添加0x标志,这样nrf905发送出的数据就会是乱码。
我们采取的解决方案就是把接收到的数据进行从16进制到ascii码的整形,这样数据就有了统一格式,问题也得到了解决。
其次就是时序匹配的问题,单片机从串口接收gps数据的速度是很快的,一次5串gps代码,而且每串代码从80位到96位长度不等,属于一种批量不定长数据传输,而nrf905的最大发送数据的位宽是32位,而且发送数据前要进行spi总线读写时序配置,这样就会有一个数据发送的延迟。
所以我们需要切割数据,并且注意发送速度与接收速度的匹配,如果发的太快,接收部分接收到的数据就会是乱码,如果发的太慢就会丢失有效数据,降低数据的有效率(因为单片机的片外数据缓存是有限制的,一旦占满了就会被新的数据覆盖,也就是说数据如果不及时取出就会被新的数据覆盖,而新的数据不一定是有效数据)。
我们通过不断更改延时直到传输不会再一直出现乱码。
2.软件设计过程中遇到的问题及解决方法。
在软件设计过程中,最棘手的问题是打开现存的串口,并且接收下位机发送给pc的定位数据方面。
先期由于没有接触过串口编程,所以在这个模块方面
还是摸索了很长时间,最后通过查阅资料,终于解决了问题。
现列举此模块代码如下: bool setserielport
(char * szport,int rate,int checkbits,int bitsize,int stopbits)
{
bool istrue=false;
m_hcom=createfile(szport,
generic_read|generic_write,0,null,op
en_existing,file_attribute_normal|
file_flag_overlapped,null);
if( m_hcom == invalid_handle_value )
{
messagebox(“串口com创建失败”);
return false;
}
dcb dcb;
zeromemory(&dcb,sizeof(dcb));
dcb.dcblength=sizeof(dcb);
dcb.baudrate=rate;
dcb.bytesize=bitsize;
dcb.parity=checkbits;
dcb.stopbits=stopbits;
dcb.fbinary=true;
dcb.fparity=false;
istrue=setcommstate(m_hcom,&dcb);
if (!istrue)
{
messagebox(“串口设置失败”);
m_hcom=null;
return false;
}
commtimeouts comtimeout;
comtimeout.readintervaltimeout=10;
// 将超时参数写入设备控制
istrue=setcommtimeouts(m_hcom,&comtimeout);if(!istrue)
{
messagebox(“超时时间设置失败!”);
m_hcom=null;
return false;
}
setupcomm(m_hcom,1024,512);
istrue=purgecomm(m_hcom,purge_txabort|purge _rxabort|purge_txclear|purge_rxabort);
if(!istrue)
{
messagebox(“缓冲区数据清除失败!”);
m_hcom=null;
return false;
}
return true;
三、研究成果的前景展望
如果考虑改进系统以便在校园内投入使用,可以考虑更换传输模块,把局域无线数据传输模块更换为基于网络的无线数据传输模块并做相应的开发研究,本系统是可以作为一个校园车辆定位系统而投入实际使用的,至于上位机软件也是可以根据需要而更换数据库的。