发动机运动仿真教材
发动机摇摆软管运动仿真实验

发动机摇摆软管运动仿真实验近年来,随着汽车工业的快速发展,发动机的性能和稳定性要求也越来越高。
发动机摇摆软管作为发动机的重要组成部分,其运动特性对发动机的工作效率和寿命有着重要影响。
因此,进行发动机摇摆软管运动仿真实验,对于提高发动机的性能和稳定性具有重要意义。
发动机摇摆软管是连接发动机和排气系统的重要部件,其主要作用是减少发动机振动和噪音,保护发动机和排气系统的其他部件。
在发动机工作过程中,由于气缸的爆炸压力和排气系统的反冲压力的作用,发动机摇摆软管会发生复杂的运动。
这种运动不仅会对发动机的工作效率和稳定性产生影响,还会对软管本身的寿命和可靠性造成影响。
为了研究发动机摇摆软管的运动特性,我们进行了一系列的仿真实验。
首先,我们使用计算机辅助设计软件对发动机摇摆软管进行了建模。
通过对软管的几何形状、材料特性和工作条件等进行建模,我们可以得到软管在不同工况下的运动特性。
然后,我们使用有限元分析软件对软管进行了有限元分析,得到了软管在不同工况下的应力和变形情况。
通过对软管的应力和变形情况进行分析,我们可以评估软管的可靠性和寿命。
接下来,我们使用多体动力学仿真软件对发动机摇摆软管的运动进行了仿真。
通过对软管的运动进行仿真,我们可以得到软管在不同工况下的运动轨迹和速度。
同时,我们还可以得到软管在不同工况下的应力和变形情况。
通过对软管的运动轨迹、速度、应力和变形情况进行分析,我们可以评估软管的运动特性和对发动机的影响。
最后,我们进行了实际的发动机摇摆软管运动实验。
通过在实验台上安装发动机摇摆软管,并模拟发动机的工作条件,我们可以观察软管在不同工况下的运动情况。
同时,我们还可以通过测量软管的应力和变形情况,验证仿真结果的准确性。
通过对实验结果的分析,我们可以进一步优化发动机摇摆软管的设计和工作条件,提高发动机的性能和稳定性。
通过发动机摇摆软管运动仿真实验,我们可以深入了解发动机摇摆软管的运动特性和对发动机的影响。
GE-nx发动机虚拟仿真教学资源建设与实践

GE-nx发动机虚拟仿真教学资源建设与实践摘要:GE-nx发动机是航空发动机中一款非常先进的发动机,对于航空发动机的学习和教学具有重要意义。
本文通过分析GE-nx发动机的结构和原理,结合虚拟仿真教学的概念和工具,建设了一套针对GE-nx发动机的虚拟仿真教学资源,并实践了教学效果。
关键词:一、引言航空发动机是航空发展的核心技术之一,其复杂的结构和工作原理成为了机械学科领域内的难点问题。
随着虚拟仿真技术的发展,虚拟仿真教学也逐渐成为了一种重要的教学方法。
通过虚拟仿真技术,我们可以将复杂的实物模型转化成数字化的模型,利用计算机模拟其运动和工作过程,实现教学目的。
二、GE-nx发动机的结构和原理分析GE-nx发动机是一款全新的航空发动机,其采用了多项新技术,包括高温材料、先进涡轮喷气推进系统等。
下面我们将对其结构和原理进行简要分析。
1. 发动机结构GE-nx发动机主要分为两个部分,分别为气体发生器和推进系统。
其中气体发生器包括燃气发生器、高压涡轮、低压涡轮和进气道等,而推进系统则包括喷嘴、后推力装置和尾喷管等。
GE-nx发动机的工作原理比较复杂,其主要是利用了化学能和动能的转换来实现物体的推进。
在发动机的工作过程中,先通过进气道将大量氧气和燃料输送到燃气发生器内,随后将其燃烧释放出高温高压的气体。
而这些气体则通过涡轮喷气推进系统产生了强大的推力,从而实现了飞行器的推进。
1. 教学内容设计针对GE-nx发动机的虚拟仿真教学资源建设,我们首先需要进行教学内容的设计。
我们将整个教学内容分为三个部分,分别为发动机的结构介绍、工作原理分析和故障诊断。
2. 虚拟仿真模型建立针对GE-nx发动机,我们需要建立一个数字化的虚拟仿真模型,包括整个发动机的结构以及各个组成部分的详细信息。
通过计算机模拟,我们可以实现发动机的运动和工作过程,以及可能出现的故障现象。
3. 虚拟仿真教学工具选择虚拟仿真教学工具是实现虚拟仿真教学的关键所在,目前常见的虚拟仿真教学工具包括仿真软件和虚拟现实技术。
GE-nx发动机虚拟仿真教学资源建设与实践

GE-nx发动机虚拟仿真教学资源建设与实践1. 引言1.1 背景介绍传统的实验教学面临着设备成本高、实验条件受限、安全隐患大等问题,虚拟仿真技术的出现为教学资源的建设提供了新思路。
利用虚拟仿真技术,可以实现对GE-nx发动机的动态仿真模拟,呈现出真实的工作过程,使学生能够在虚拟环境中进行实时操作和观察,提升他们的学习兴趣和主动性。
本文将围绕GE-nx发动机虚拟仿真教学资源的建设与实践展开探讨,旨在探究利用虚拟仿真技术提高航空专业教学的效果和实用性,为航空领域的教育教学工作提供新的思路和方法。
1.2 研究意义GE-nx发动机虚拟仿真教学资源建设与实践具有重要的研究意义。
虚拟仿真技术可以有效提高学生的学习兴趣和参与度,通过生动形象的虚拟仿真场景,可以激发学生的学习热情,使他们更加积极地参与到教学中来,从而提高学习效果。
虚拟仿真技术可以帮助学生更加直观深入地理解复杂的技术原理和工作机制,例如GE-nx发动机的结构和工作原理,通过虚拟仿真可以让学生在一个安全、无风险的环境下进行实验和探索,加深他们对知识的理解和掌握。
虚拟仿真技术还可以提高教学效率,减少实验设备和实验材料的消耗,节约教学资源,提高教学的经济效益。
对于提高教学质量,促进学生全面发展,推动教育信息化发展具有重要的研究意义。
1.3 研究目的本研究旨在探讨利用GE-nx发动机虚拟仿真技术进行教学资源建设的有效性,并分析其实际的教学应用效果。
具体目的包括:1. 分析GE-nx发动机虚拟仿真技术的特点和优势,探讨其在教学资源建设中的应用潜力;2. 构建基于GE-nx发动机虚拟仿真技术的教学资源体系,提供全面、系统的学习支持;3. 探讨利用虚拟仿真技术进行教学实践的方法和策略,促进学生的学习动力和效果;4. 通过案例分析,总结GE-nx发动机虚拟仿真技术在教学中的具体应用和效果;5. 对教学效果进行评估,验证虚拟仿真教学资源对学生学习成效的影响。
通过以上研究目的的实现,将为GE-nx发动机虚拟仿真教学资源的建设和实践提供理论支撑和实际指导,为教育教学领域的虚拟仿真技术应用提供新的思路和方法。
发动机工作过程仿真试验指导书

能源与动力工程专业实验——发动机工作过程仿真实验实验指导书重庆理工大学车辆工程学院实践教学及技能培训中心2010年9月发动机工作过程仿真实验指导书一、实验名称发动机工作过程仿真实验二、实验课时及类型1、学时:8H2、类型:综合设计型三、实验目的1、熟悉发动机数值模拟软件2、掌握发动机建模与参数设置流程3、掌握数值模拟结果分析方法四、实验原理及方法利用大型商业化软件,在CFD及传热、燃烧基础理论的支撑下,模拟分析发动机混合气形成、燃烧、传热、污染物生成、火焰传播,研究发动机缸内的参数。
利用其简单、花费小、周期短的特点,结合台架试验,进一步了解发动机缸内工作状况及其影响因素,以便高效组织缸内燃烧。
五、实验仪器和设备1、计算服务器2、数值模拟软件3、标定工具六、实验步骤及内容1、准备好计算服务器2、安装仿真软件,Fire或者GT-Power,安装过程详见软件手册,保证软件正常工作。
3、导入发动机燃烧室,进气道,活塞的几何模型,检查模型是否完整。
4、准备面surface mesh和线edge mesh:要求:面必须是封闭曲面,一般FIRE中可以应用的是.stl的文件,在PRO/E,CATIA 等三维的造型软件中都可以生成;与面的处理相似的还要准备边界的线数据5、Hybrid assistant,选择start new meshing,分别定义表面网格define surface mesh 和线网格define edge mesh6、然后进入高级选项fame advanced hybrid,在这里定义最大网格尺寸和最小网格尺寸,最大网格尺寸是最小网格尺寸的2^n倍,点Next进入refinement界面,在refinement 界面应当勾选auto refinement,点击next,finish进入网格自动划分过程。
7、划分完网格,选择体网格激活check选项,所生成的网格应保证required check 选项下所有的检查结果为0。
发动机曲柄连杆机构运动及动力特性分析与仿真
第 一种情 况 : 当
时,活 塞加速 度在 曲
4
轴转 动 一 圈的范 围 内有两 个 极值 : 在 , 0 处 , = 。 即上 止 点处 , 塞加速 度 极大 值为 : 活
作 者简 介 :李鹏 (9 6 )男 ,在 读硕 士 ,主要 研 究方 向 为内燃 机动 态 设计 。 18 -
( 5 )
结 合() 分析 :速度 1对 曲轴 转角 作一 次 4式 ,
Va≈+ c /+ 2,其所在位置 ( 表 示 , x Ro 1 2 x v) m
图 1 曲柄 连 杆 机 构 简 图
、 .
x = a ccos— r
/+—2 — 8 —1 1 2
—
发 动机 曲柄连 杆 机 构 由活塞 组 、连 杆 组和 曲 轴 组三 大 部分 组成 。 1 图 是正 置式 曲柄 连杆 机构 运
机 电技术
21 年 6 01 月
a =R o(+2 c 1 )
Байду номын сангаас
() 6
,
一
( ) +
() 8
在 ,=10 处 ,即下 止 点处 ,活塞 加速度 极 小值 8。
1 连杆 运 动学分 析 . 2
为:a, R o (一 =一 c 1 )
1
() 7
= ・ D () 9
速度 近似 式代 入 ,可 得 曲柄连 杆机 构 的往 复惯 性
力为:
= m, c ( S ̄ cs a - R o C O+2 o 2 ) O
一
4
结合 () 分析 :活 塞加 速度 极值 的大 小及 位 5式 置有 两 种情 况 :
1
动和动力分析简图,其 中活塞组和连杆小端沿气 缸 中心 线 做往 复 直线 运 动 , 曲轴组 和连 杆 大端 作 回转运 动 。运 动 过程 中 ,各 部 件 的速度 和 加速 度
航空发动机原理虚拟仿真教学实验
航空发动机原理虚拟仿真教学实
验
本实验课程设置“推进原理认识—部件特性实验—集成匹配实验—整机特性实验”4个实验环节,对于各环节提出了不同的目标。
(1)推进原理认识
以分解部件的形式展示发动机推力产生的过程,建立学生对发动机整机工作过程的全面认知和理解,并为下一步部件特性实验和整机实验奠定基础
(2)部件特性实验
通过引导学生自主操作的模式完成发动机中进气道、压气机、燃烧室、涡轮、尾喷管特性的试验,重点掌握进气道不起动、进气畸变对压气机特性的影响、矢量喷管调节等航空发动机使用过程中遇到的关键问题
(3)集成匹配实验
学生通过调整喷嘴面积、涡轮导向器安装角度、中间级引气开度等,观察发动机特性的变化,特别是由于调整不合理导致的发动机部件不匹配引起的喘振等异常工况。
(4)整机特性实验
学生通过在虚拟试车台上的整机实验,获得标准/非标准天气下,随着发动机油门杆、飞行高度、飞行速度的改变,发动机的运行参数、各部件的性能参数、各部件的状态参数,理解发动机的整机工作特性。
一种发动机动态模拟教具的开发

2018年第1期时代农机TIMES AGRICULTURAL MACHINERY第45卷第1期Vol.45No.12018年1月Jan.2018作者简介:何涛(1982-),男,安徽合肥人,大学本科,讲师,主要研究方向:中职汽车专业课程教育教学。
一种发动机动态模拟教具的开发何涛(,231131)摘要:文章描述了一台适合课堂教学的教具制作过程。
通过对发动机零件进行测绘,使用Autodesk Inventor 软件进行三维建模,利用3D 打印技术完成零件实体造型,通过组装后的发动机动态模拟教具完成发动机工作过程模拟。
关键词:三维建模;虚拟装配;3D 打印技术如何利用学校现有资源,开发出具有学校特色、成本低廉的教具,通过学生实训提升全方位技能水平,切实提高人才培养质量,成为各中职学校面临的主要问题。
1中职实训面临的问题国务院《关于加快发展现代职业教育的决定》中提出,职业院校各类专业的人才培养水平要大幅提高,特别是加强实训设备配备水平和实训能力,教学过程中广泛应用现代信息技术,提高职业院校信息化教学能力。
中职汽车运用与维修专业的人才培养目标是让学生获得先进的汽车故障诊断和维修技术,掌握现代汽车维修基本操作技能,能够迅速融入汽车维修企业,符合岗位要求,成为汽车维修行业的一线技师。
2汽车发动机动态模拟教具开发思路汽车运用与维修专业是中职学校传统专业,教学过程中所采用的教具多为实物,而汽车零部件存在价格高、重量大和搬运不便等情况,为教师课堂教学带来诸多不便。
发动机动态模拟教具则依托现有3D 打印技术专业优势,利用3D 打印技术将发动机各零件使用热塑性材料加工后再进行装配,既降低了发动机装配体积和重量,而且成本低廉,同时可以为3D 打印技术专业学生提供实训机会,可谓一举多得,教具开发流程如图1所示。
图1教具开发流程3发动机工作原理汽车发动机每次完成一个工作循环,包括进气、压缩、做功、排气四个过程,在一个工作循环中活塞往复上下运动两次,曲轴旋转两圈,凸轮轴旋转一圈,发动机循环过程如图2所示。
CATIA航空产品设计与制造课件:运动仿真

运动仿真
1
工程图基础
2
视图的创建
3
三维尺寸标注
CONTENTS
目
录
项目
1
运动机构仿真基础
进入运动机构仿真工作台 运动机构仿真结构树
运动机构仿真基础
1.1 概述
运动机构仿真基础
1.2进入运动机构仿真模块
运动机构仿真基础
用户界面:运动机构仿真
运动机构仿真基础
结构树:运动பைடு நூலகம்构仿真
运动机构仿真 3.1 运动机构仿真
运动机构仿真基础 3.2 定义固定部件
运动机构仿真基础 3.3 机构运动副的添加
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.4 驱动命令的添加
运动机构仿真基础
运动机构仿真基础 3.5 机制修饰的添加
运动机构仿真基础 3.6 驱动命令添加规则
➢ 点和曲面副
运动副的创建
➢ 滑动曲线副
运动副的创建
➢ 滚动曲线副
运动副的创建
➢ 点、曲面副
运动副的创建
➢ 万向节副
运动副的创建
➢ CV关联副
运动副的创建
➢ 齿轮副
运动副的创建
➢ 齿条副
运动副的创建
01 02 03
➢ 课程导学 ➢ 课程录屏
项目
3
运动机构仿真
运动机构仿真一般步骤 运动机构副的添加 运动机构仿真
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.7 使用命令或者规则进行机构仿真
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础
运动机构仿真基础 3.8 运动机构仿真的记录和回放
基于Pro_E的发动机活塞运动仿真分析

马成习 :基于 Pro / E的发动机活塞运动仿真分析
装配时注意 :将转动件的连接设置为销钉连接 ,将移动件的连接 设置为滑动杆连接 ,且连杆的两端均设置为销钉连接 。否则在后续 的运动学分析中可能会失败 。 2. 2 机构运动学分析
在 Pro / E的 Mechanism 模块下 ,机构的运动仿真主要通过以下 3 个步骤进行 :一是对装配好的机构模型建立伺服马达 ,使机构产生一 定形式的运动 ;二是运行一个机构运动分析 ,产生可视化的机构运动 过程 ,保存运动分析结果 ;三是进行分析测量 ,得到分析测量图形 ,同 时输出分析结果 。
在发动机的活塞连杆机构中 ,对曲轴建立一个伺服马达 ;通过运 行机构运动分析 ,产生了整个机构的一个可视化的运动过程 (以发动 机转速 2 200 r/m in为例 ) 。在分析测量阶段 ,主要分析了活塞的位 移 、速度及加速度随时间变化的过程 (如图 3~图 5所示 ) 。
图 3 活塞行程随时间变化规律曲线 F ig. 3 C u rve o f P is to n’s D is ta nce w ith Tim e
3)本文介绍的遗传算法在汽车动力传动系参数设计变量上的优 化运用 ,不仅能对传动系参数匹配快速做出优化选择 ,而且使得在设 计阶段就比较准确地预测传动系匹配方案的节油效果和动力性能 。 这就避免了设计人员在设计阶段的盲目性 、缩短了产品开发研制时 间 。在汽车开发过程中具有一定的使用价值 。
参考文献 : [ 1 ] 张文修 ,梁怡. 遗传算法的数学基础 [M ]. 西安 :西安交通大学出版社 ,
4)基于 Pro / E的机构运动仿真已经进入了可视化仿真以及虚拟 现实仿真技术的新阶段 ,它是未来计算机仿真的发展方向 ,并且它为 发动机理论的研究提供了新的思路 。
TurboC4190内燃机动力学模拟仿真课程设计解析

<<内燃机课程设计>>目录一、4190型柴油机题目条件二、4190型柴油机热力计算及结果1、柴油机参数选择2、热力计算源程序代码3、热力计算结果4、热力计算示功图三、4190型柴油机动力计算及结果1、柴油机的已知参数2、动力计算源程序代码3、主要参数计算结果4、P—φ示功图5、活塞位移变化曲线图6、活塞速度变化曲线图7、活塞加速度变化曲线图8、往复惯性力变化曲线图9、总作用力变化曲线图10、活塞侧推力和连杆力变化曲线图11、法向力和切向力变化曲线图12、单缸机转矩变化曲线图13、曲柄销和主轴颈负荷变化曲线图14、总转矩变化曲线图15、动力学计算结果一、4190型柴油机题目条件缸径: D=190mm行程: S=210mm缸数: i=4转速: n=1600r/min连杆长度: L=370mm冲程数:四冲程二、4190型柴油机热力计算及结果1、柴油机参数选择压缩比:ε=15大气状态: P0=0.10MPa T=293K燃料平均重量成分: C=0.86 H=0.13 O=0.01 燃油低热值: Hu=42705kj/kg过量充气系数:Φa=1.6气体爆发压力: Pz=6.5MPaz点的热利用系数:ζz=0.65b点的热利用系数:ζb=0.8残余废气系数:Φ=0.03残余废气温度: Tr=750K机械效率:ηm=0.80空气进入气缸的温度升高:ΔT=5℃c点的热利用系数:ζc=1.112、热力计算源程序代码#include "graphics.h"#include "conio.h"#include "dos.h"#include "math.h"void draw(n1,Pa,s1,n2,Pb,l,p,Pz)float n1,Pa,s1,n2,Pb,l,p,Pz;{float k,j;int gdriver,gmode,i,x,y,r,L=500,B=40,u,z;gdriver=DETECT;initgraph(&gdriver,&gmode,"");setbkcolor(15); setcolor(8); cleardevice();line(20,55,20,410); line(20,410,600,410);line(20,55,17,65); line(20,55,23,65);line(600,410,590,407); line(600,410,590,413);gotoxy(2,4); printf("p");gotoxy(2,5); printf("/");gotoxy(2,6); printf("MPa");k=(float)(L/s1); u=L; z=(int)(B*Pa);gotoxy(1,2); printf("mapl-l 6160");x=L;r=(int)(B*Pa*pow((float)L/x,n1));u=x;z=r;for(x=L;x>=(int)(k);x--){r=(int)(B*Pa*pow((float)L/x,n1));line(u,400-z,x,400-r);u=x,z=r;}line(x+1,400-r,(int)(p*L/s1-1),(int)(400-B*Pz));j=(float)(L/l); u=L; z=(int)(B*Pb);moveto(505,415); outtext("V*10e-4/(m*m*m)");y=L;r=(int)(B*Pb*pow((float)L/y,n2));u=y; z=r;for(y=L;y>=(int)j;y--){r=(int)(B*Pb*pow((float)L/y,n2));line(u,400-z,y,400-r);u=y;z=r;}gotoxy(6,4);printf("z");moveto(505,375);outtext("a");moveto(25,250); outtext("c");moveto(505,400);outtext("b");arc(L,400-(int)(B*(Pa+(Pb-Pa)/2)),270,450,(int)(B*(Pb-Pa)/2));getch();closegraph();}void main(){float Hu=42705,D=190,S=210,N=1600,gc=0.86,gh=0.13,go=0.01;float Pz=6.0,a=1.6,sz=0.65,sb=0.80,Rr=0.03,Tr=750,Qm=0.80,s=15,P0=0.1,T0=300;float T1=5,sc=1.11,a2=19.26,b=0.0025,o=0.98;float Ta,Pa,Qv,n1,n2,m,n,Tc,Pc,L0,L,gi,B,B0,Xz,Bz,Cvpmx,Cppmx,Cvpmc,Cvpmz,Cvpmb, Cv1,Cv11,Cv2,Va,Tz,Tb,Tk,k,l,Pb,Pk,Pi1,Pi,Qi,ge,Qe,Pe,Cm,Hu1,Cppmz,p,Bb;printf("********************************\n");Ta=(T0+T1+sc*Rr*Tr)/(1+Rr);Pa=0.9*P0;Qv=s*T0*Pa/((s-1)*Ta*P0*(1+Rr));printf("Ta=%fK\n;Pa=%fMPa\n",Ta,Pa);printf("Qv=%f\n",Qv);n1=1.38;do{m=n1;n1=1+8.315/(a2+b*Ta*(1+pow(s,(m-1))));}while(fabs(m-n1)>0.0001);printf("n1=%f\n",n1);Tc=Ta*pow(s,n1-1);Pc=Pa*pow(s,n1);L0=(gc/12+gh/4-go/32)/0.21;L=a*L0;B0=1+0.0639/a;B=(B0+Rr)/(1+Rr);Xz=sz/sb;Bz=1+(B0-1)*Xz/(1+Rr);printf("Tc=%fk\n;Pc=%fMPa\n",Tc,Pc);Cv2=19.26+0.0025*Tc;Cv11=20.47+0.0036*Tc;Cvpmc=((1.064+Rr)*Cv11+(a-1)*(1+Rr)*Cv2)/(a*(1+Rr)+0.064);Tb=293;Cv1=19.26+0.0025*Tb; Cv11=20.47+0.0036*Tb;Cvpmb=((1.064+Rr)*Cv11+(a-1)*(1+Rr)*Cv1)/(a*(1+Rr)+0.064);Hu1=Hu+L*(1+Rr)*(B*Cvpmb-Cv1)*293;printf("Hu1=%fkJ/kg\n",Hu1);k=Pz/Pc;Tb=1200;Cv1=19.26+0.0025*Tb; Cv11=20.47+0.0036*Tb;Cvpmb=((1.064+Rr)*Cv11+(a-1)*(1+Rr)*Cv1)/(a*(1+Rr)+0.064);n=2200;do{Tz=n;Cv1=19.26+0.0025*Tz; Cv11=20.47+0.0036*Tz;Cvpmz=((1.064*Xz+Rr)*Cv11+(a*(1+Rr)-(Xz+Rr))*Cv1)/(a*(1+Rr)+0.064*Xz);Cppmz=Cvpmz+8.315;n=(sz*Hu1/(a*L0)+(Cv2+8.315*k)*Tc+Rr*(Cvpmc+8.315*k)*Tc)/(Bz*(1+Rr)*Cppmz);}while (fabs(Tz-n)>0.0001);printf("Tz=%fK\n",Tz);p=B*Tz/(k*Tc);l=s/p;Tb=1200;do{m=Tb;Cv1=19.26+0.0025*Tb; Cv11=20.47+0.0036*Tb;n2=8.315*(Tz-Tb)/((sb-sz)*Hu1/((1+Rr)*L*B)+Tz*Cvpmz-Cvpmb*Tb)+1;Tb=Tz*B/(Bz*pow(l,n2-1));}while(fabs(m-Tb)>0.01);printf("Tb=%fK\n;n2=%f\n",Tb,n2);Pb=Pz/pow(l,n2);printf("Pb=%fMpa\n",Pb);(float)Pi1=Pc*(k*(p-1)+k*p*(1-1/pow(l,n2-1))/(n2-1)-(1-1/pow(s,n1-1))/(n1-1))/(s-1); Pi=Pi1*o;gi=12.54e6*Qv*P0/(28.96*L*T0*Pi);Qi=3600.0*1000.0/(gi*Hu);Pe=Pi*Qm; ge=gi/Qm; Qe=Qi*Qm;printf("Pil=%fMPa\n;Pi=%fMPa\n;gi=%fg/kW.h\n;Qi=%f\n",Pi1,Pi,gi,Qi);printf("Pe=%fMPa\n",Pe);printf("ge=%fg/kW.h\n;Qe=%f\n",ge,Qe);printf("*************************\n");getch();draw (n1,Pa,s,n2,Pb,l,p,Pz,Pc);}3、热力计算结果4、热力计算示功图三、4190型柴油机动力计算及结果1、柴油机的已知参数转速: n=1600r/min连杆长度: L=370活塞组质量: mB=3.207连杆质量: mL=3.95连杆中心到小头的距离: LB 230曲柄销质量: mZ=2.47一半曲臂质量: mH=4.11曲臂偏心矩: pp=85.0曲柄半径: r=92.5许用不匀度: dd=2.0/100)压缩比: E=15平均压缩多变指数: n1=1.37平均膨胀多变指数: n2=1.216气体爆发压力: Pz=7.0外界气压: Pa=0.092、动力计算源程序代码##include"stdio.h"#include"math.h"#include"conio.h"#include"graphics.h"#define n 1600#define L 370#define mB 3.207#define mL 3.95#define LB 230#define mZ 2.47#define mH 4.11#define pp 100#define r 92.5#define dd (2.0/100.0)#define E 15#define fn 1.392#define n1 1.37#define n2 1.216#define q 13.287#define Pz 7.0#define Pa 0.09#define Pb 0.32#define PI 3.141592654#define kk 92.5/370int i,j,xx,yy;char s[30];double x1,x2,y1,y2,k,k1;float aa[253],zz[106];/* 已知条件 */void f_print(){ textbackground(0);clrscr();textcolor(2);window(4,4,25,70);printf("\n\n\n");printf("\n");printf("known data:\n");printf("\n\n");printf("connecting rod length L=450mm\n\n");printf("piston quality: mB=4.8kg\n\n");printf("connecting rod quality mL=7.2kg\n\n");printf("rod center to small point head: LB=315\n\n");printf("qu bing xiao quality: mZ=3.0kg\n\n");printf("(half) qu bi quality: mH=5.0kg\n\n");printf("qu bi zhi xin pian xin ju: p=120mm\n\n");printf("xu yong bu jun du: [\xeb]=2.0/100.0\n\n"); getch(); }/*屏幕模式*/void f_mode(){ int gd=DETECT, gm;initgraph(&gd,&gm,"c:\\TC20\\BGI");}void fun_ft(int ft,int fd,int ti,float tt, float ts){ setcolor(3);settextjustify(1,1);settextstyle(2,0,4);for(i=0;i<ti;i++){ line (60,ft-i*fd,63,ft-i*fd);sprintf (s,"%.lf",-1.0*tt+i*ts);outtextxy(40,ft-i*fd,s);} }void fun_camp(int x3,int y3,int x4,int y4){settextjustify(1,1);settextstyle(2,0,5);outtextxy(x3,y3,"(MPa)");settextstyle(2,0,5);outtextxy(x4,y4,"ca");}void fun_caNm(int x3,int y3,int x4,int y4) {settextjustify(1,1);settextstyle(2,0,5);outtextxy(x3,y3,"(Nm)");settextstyle(2,0,5);outtextxy(x4,y4,"ca");}/* 画xy坐标轴 */void f_zb(int my,int by,int dx,int BB) {setbkcolor(15);setcolor(1);cleardevice();setcolor(1);setlinestyle(0,0,2);line(60,10,60,by);line(60,my,590,my);moveto(60,0);lineto(62,14);lineto(58,14);lineto(60,0);floodfill(60,51,1);moveto(590,my);lineto(578,my-2);lineto(578,my+2);lineto(590,my);floodfill(580,my,1);settextjustify(1,1);settextstyle(2,0,4);for(i=1;i<13;i++){line(60+i*dx,my,60+i*dx,my-3);sprintf(s,"%d",i*BB);outtextxy(60+i*dx,my+6,s);}settextstyle(2,0,5);outtextxy(66,my+6,"0");getch(); }/* 气体压力与转角的关系 */void f_Gca(){float vc,x3;vc=185/(E-1);k=r/L/4.0;settextjustify(1,1);settextstyle(2,0,8);outtextxy(40,54,"P");settextstyle(2,0,5);outtextxy(40,60,"G");fun_camp(40,76,600,405);fun_ft(400,26,12,0,1);setcolor(1);moveto(186,400-Pa*26);for(i=126;i<253;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1)));x3=(vc+185)/(vc+x2);y1=19*Pa*pow(x3,n1);xx=i+60;yy=400-(int)y1;lineto(xx,yy);}for(i=256;i<379;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1)));x3=(vc+x2)/vc;y1=x3/fn;y2=19*Pz/pow(y1,n2);xx=i+60;yy=408-(int)y2;lineto(xx,yy);}lineto(443,400);getch();}/*活塞位移与转角的关系*/void f_Xca(){setcolor(1);settextjustify(1,1);settextstyle(2,0,4);fun_ft(400,20,20,0,20);settextstyle(2,0,8);outtextxy(75,10,"x");settextstyle(2,0,4);outtextxy(75,25,"(mm)");settextstyle(2,0,6);outtextxy(600,385,"ca");setcolor(1);moveto(60,400);for(i=0;i<505;i++){x1=i*PI/(6*42);x2=1-cos(x1)+(1-cos(2*x1))*kk/4; xx=60+i;y1=92.5*x2;y2=400-y1;yy=(int)y2;lineto(xx,yy);}getch();}/*活塞速度与转角的关系*/void f_vca(){setcolor(1);settextstyle(2,0,8);outtextxy(75,10,"x");circle(75,5,1.5);settextstyle(2,0,6);outtextxy(600,245,"ca"); settextjustify(1,1);settextstyle(2,0,4);outtextxy(75,25,"(m/s)");fun_ft(490,50,10,10,2.0); setcolor(1);moveto(60,240);for(i=0;i<505;i++){x1=i*PI/252;x2=sin(x1)+kk*sin(2*x1)/2;xx=60+i;y1=175*x2;y2=240-y1;yy=(int)y2;lineto(xx,yy);}getch();}/*活塞加速度与转角的关系*/void f_aca(){setcolor(1);settextstyle(2,0,8);outtextxy(80,10,"x");circle(78,5,1.5);circle(82,5,1.5);settextstyle(2,0,6);outtextxy(595,270,"ca"); settextjustify(1,1);settextstyle(2,0,4); outtextxy(105,15,"(m/s)"); settextstyle(2,0,2); outtextxy(115,15,"2"); settextjustify(1,1); settextstyle(2,0,4);fun_ft(370,13,22,1000,100); setcolor(1);moveto(60,260-132*(1+kk)); for(i=0;i<505;i++){x1=i*PI/252;x2=cos(x1)+kk*cos(2*x1);xx=60+i;y1=92.5*x2;y2=260-y1;yy=(int)y2;lineto(xx,yy);}getch();}/* 往复惯性力曲线 */void f_Pjca(){setcolor(1);fun_camp(36,50,595,235); settextjustify(1,1); settextstyle(2,0,4);fun_ft(400,45,8,0.4,0.1); settextjustify(0,1); settextstyle(2,0,6); outtextxy(320,60,"Pj1"); outtextxy(320,100,"Pj"); outtextxy(320,140,"Pj2"); setcolor(1);moveto(60,360);for(i=0;i<505;i++){x1=i*PI/126;x2=cos(x1);xx=60+i;y1=220+100*x2;yy=(int)y1;lineto(xx,yy);}line(200,125,310,60); setcolor(7);moveto(60,220+100*kk);for(i=0;i<505;i++){x1=i*PI/126;x2=cos(2*x1);xx=60+i;y1=220+kk*100*x2;yy=(int)y1;lineto(xx,yy);}line(255,195,310,140); setcolor(5);moveto(60,220+60*(1+kk));for(i=0;i<505;i++){x1=i*PI/126;x2=cos(x1)+kk*cos(2*x1);xx=60+i;y1=220+100*x2;yy=(int)y1;lineto(xx,yy);}line(240,172,310,100); getch();}/* 活塞受载荷变化曲线 */void f_Pca(){float vc,x3,x4,x5,y3,y4;vc=185.0/(E-1);k=r/L/4.0;setcolor(8);fun_camp(30,65,595,410);fun_ft(492,46,12,2,1); settextjustify(1,1); settextstyle(2,0,4);setcolor(13);settextstyle(2,0,6);outtextxy(450,100,"PG"); outtextxy(500,230,"P"); outtextxy(550,260,"Pj");line(327,170,425,105);line(350,370,485,235);line(460,388,535,265); setcolor(1);moveto(60,400+20*(1+kk));for(i=0;i<505;i++){x1=i*PI/126;x2=cos(x1)+kk*cos(2*x1);xx=60+i;y1=20*x2;yy=400+(int)y1;j=(int)(i/2.0);aa[j]=-y1;if(i>169&&i<383){setcolor(5);lineto(xx,yy);}setcolor(8);lineto(xx,yy);}setcolor(8);moveto(188,400-Pa);for(i=126;i<253;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1))); x3=(vc+225)/(vc+x2);y1=32*Pa*pow(x3,n1);j=(int)(i/2.0);aa[j]=aa[j]+0.5*y1-3;xx=i+60;yy=403-(int)y1;lineto(xx,yy);}for(i=253;i<379;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1))); x3=(vc+x2)/vc;y1=x3/fn;y2=32*Pz/pow(y1,n2);j=(int)(i/2.0);aa[j]=aa[j]+0.5*y2-6;xx=i+60;yy=410-(int)y2;lineto(xx,yy);}lineto(445,400);setcolor(8);moveto(215,385);for(i=168;i<379;i++){xx=i+60;j=(int)(i/2.0);yy=400-(int)aa[j];lineto(xx,yy);} lineto(443,385);getch();}/*piston ce xiang ya li and conneting-rod force*/ void f_Ntca(){ int j;setcolor(1);fun_camp(36,65,595,296);fun_ft(400,40,11,3,1);setcolor(8);settextstyle(2,0,7);outtextxy(450,160,"Pcr");outtextxy(480,200,"PN");line(340,218,430,165);line(393,280,465,205);setcolor(4);moveto(60,280); /*PN*/for(i=0;i<505;i++){x1=asin(92.5*sin(i*PI/126)/370.0);x2=tan(x1);xx=i+60;j=(int)(i/2.0);y1=1.0*aa[j]*x2;yy=280-(int)y1;lineto(xx,yy);}setcolor(13); /*Pcr*/moveto(60,334);for(i=0;i<505;i++){x1=asin(92.5*sin(i*PI/126)/370);x2=1.0/cos(x1);xx=i+60;j=(int)(i/2.0);y1=1.0*aa[j]*x2;yy=280-(int)y1;lineto(xx,yy);}getch();}/*曲柄销载荷变化曲线*/void f_Zca(){float x3;setcolor(1);fun_camp(36,65,595,295);fun_ft(400,40,11,3,1);setcolor(8);settextstyle(2,0,7);outtextxy(450,160,"PI");outtextxy(480,200,"Pra");line(332,190,435,165);line(400,270,460,205);setcolor(13);moveto(60,333);for(i=0;i<505;i++){x1=1.0*i*PI/126;x2=asin(92.5*sin(x1)/370.0);x3=cos(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3;yy=280-(int)y1;lineto(xx,yy);}getch();}void f_Tca(float kn){float x3;setcolor(1);moveto(60,280);for(i=0;i<505;i++) /*曲轴销处切向力*/ {x1=i*PI/126;x2=asin(92.5*sin(x1)/370);x3=sin(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3*kn;yy=280-(int)y1;lineto(xx,yy);}getch();}/*主轴径载荷变化曲线*/void f_Rca(){float x3,x4,y3;fun_ft(380,50,9,0,0.5);fun_camp(36,65,595,395);setcolor(8);settextstyle(2,0,7);outtextxy(500,140,"Ra");outtextxy(500,180,"Ro");line(440,253,485,145);line(470,245,485,195);setcolor(1);moveto(60,213);for(i=0;i<505;i++) /*曲轴销处总支反力*/{x1=i*PI/126;x2=asin(92.5*sin(i*PI/126)/370.0);x3=sin(x1+x2)/cos(x2);x4=cos(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3;y2=aa[j]*x4;y3=sqrt(pow(y1,2)+pow((y2-4),2));yy=272-(int)y3;lineto(xx,yy);}setcolor(6);moveto(60,203);for(i=0;i<505;i++) /*主轴径处总支反力*/ {x1=i*PI/126;x2=asin(92.5*sin(i*PI/126)/370.0);x3=sin(x1+x2)/cos(x2);x4=cos(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3;y2=aa[j]*x4;y3=sqrt(pow(y1,2)+pow((y2-20),2));yy=277-(int)y3;lineto(xx,yy);}getch();}/* 单缸输出转矩变化曲线 */void f_Mca(){ fun_ft(355,25,12,30000,10000);fun_caNm(36,65,595,328);setcolor(8);outtextxy(380,120,"Mt");f_Tca(1.9);getch();}/*total jia qie li arc */void f_Timm(){fun_camp(36,65,595,328);fun_ft(382,31,10,0.6,0.3);}void f_Tica(){ int kt,jt;float x3,x4,x5,kj=0.0;setcolor(1);moveto(60,290);for(i=0;i<505;i++) /* Ti */ {x5=0.0;for(kt=0;kt<4;kt++){ x1=126.25*kt+i;if(x1>504)x1=x1-504;j=(int)(x1/2.0);x2=(x1)*PI/126;x3=asin(kk*sin(x2));x4=sin(x2+x3)/cos(x3);x5=x5+x4*aa[j];}xx=i+60;y1=x5*2;kj=kj+y1;yy=320-(int)y1;lineto(xx,yy);}kt=kj/504.0;getch();}/*多缸机输出转矩曲线*/void f_Mdca(){int kt;float sc,x3,x4,x5;fun_caNm(36,65,595,328);fun_ft(395,25,10,30000,10000);f_Tica();setcolor(8);outtextxy(380,120,"T Mt");setcolor(6);line(60,320-k,564,320-k);for(i=0;i<504;i++) /*T Mt*/{x5=0.0;for(kt=0;kt<4;kt++){x1=126*kt+i;if(x1>504)x1=x1-504;j=(int)(x1/2.0);x2=(x1)*PI/126;x3=asin(kk*sin(x2));x4=sin(x2+x3)/cos(x3);x5=x5+x4*aa[j];}xx=i+60;y1=x5*6;sc=y1-k;if(i>50){if(sc<0.5) break;}k1=fabs(sc);}k1=28*k1;getch();}/* output result of calculate*/void f_fprin(){ float mA,x3,x4,y3,y4,I0,I1,I2,I3; textbackground(1);clrscr();textcolor(6);window(4,4,25,70);mA=mZ+2.0*mH*pp/r;x1=0.001*r*(mA+1.716)*pow((PI*n/30),2);x2=0.001*r*mL*LB/L*pow((PI*n/30),2);printf("\n\n");printf("li xin guan xing li Pr :\n\n\n"); printf(" Pr=%.3fN",x1);printf(" PrB =%.3fN\n\n",x2); I2=(mA+mL*LB/L)*pow(0.0925,2);I3=(mB+mL*(L-LB)/L)*pow(0.0925,2)/2.0;I0=k1/(pow((n*PI/30),2)*dd);I1=4*(I0-I2-I3);printf("flying wheel zhuan dong guan liang :I1\n");printf(" I1=%.3f",I1); getch();}main(){f_print();f_mode();f_zb(400,460,42,60);f_Gca();f_zb(400,460,42,30);f_Xca();f_zb(240,460,42,30);f_vca();f_zb(240,460,42,30);f_aca();f_zb(220,460,42,60);f_Pjca();f_zb(400,460,42,60);f_Pca();f_zb(280,460,42,60);f_Ntca();f_zb(280,460,42,60);f_Tca(1.0);f_Zca();f_zb(380,460,42,60);f_Rca();f_zb(280,460,42,60);f_Mca();f_zb(320,460,42,60);f_Timm();f_Tica();f_zb(320,460,42,60);f_Mdca();getch();closegraph();f_fprin();}3、主要参数计算结果4、P—φ示功图5、活塞位移变化曲线图6、活塞速度变化曲线图7、活塞加速度变化曲线图8、往复惯性力变化曲线图9、总作用力变化曲线图10、活塞侧推力和连杆力变化曲线图11、法向力和切向力变化曲线图12、单缸机转矩变化曲线图13、曲柄销和主轴颈负荷变化曲线图14、总转矩变化曲线图15、动力学计算结果。
北京吉普汽车发动机气门机构的运动学仿真

北京吉普汽车发动机气门机构的运动学仿真任务书1.设计的主要任务及目标以四冲程的汽油机下置式凸轮配气机构为例,应用pro/e软件,对配气机构的凸轮运动进行仿真,并对结果分析,提出合理优化建议。
2.设计的基本要求和内容完成汽油发动机气门机构的零件模型建立。
运用软件完成气门机构的运动仿真并提出优化策略。
提交设计说明书一份,提交pro/e模型一份及分析图表各一份。
3.主要参考文献1)濮良贵,机械设计(第八版)[M],高等教育出版社,2010.62)孙恒,机械原理(第七版)[M],高等教育出版社,2012.73)刘峥,王建昕,汽车发动机原理教程[M],清华大学出版社, 20014)松凌珺,岳荣刚,王永皎,中文版Pro/ENGINEER Wildfire基础教程(第二版)[M],清华大学出版社,2012.5审核人:年月日北京吉普汽车发动机气门机构的运动学仿真摘要:配气机构是发动机的重要组成部分,它是按照发动机的每一气缸所进行的工作循环和发火次序的要求,定时开关进、排气门,是使新鲜空气及时充分的进入气缸,废气得以及时的彻底的排除气缸。
为了提高发动机的性能,需要大量的实验和计算优化配气机构的相关参数。
但是由于发动机实验耗时较长,而且经费消耗巨大,实验数据也不便测量,同时由于计算机技术的飞速发达,现代设计技术被广泛的应用于发动机设计制造当中。
本设计以四冲程的汽油机下置式凸轮配气机构为例,在借鉴国内外设计开发经验的基础上,应用pro/e软件,对配气机构的凸轮运动进行仿真,并对结果分析,提出合理优化建议。
关键词:发动机,气门机构,凸轮,运动仿真,pro/e软件Beijing jeep automobile engine valve mechanism kinematicsimulationAbstract: Distribution institution is an important part of the engine. It is according to the work cycle of each cylinder of engine and firing order requirements, time switch inlet and exhaust valves, it is to make the fresh air in a timely manner fully into the cylinder, exhaust gas to timely cylinder completely ruled out. In order to improve the performance of the engine requires, we need a lot of valve-train optimization of experiment and calculation of relevant parameters .But, because of the engine experiment takes long time, and more money, and the experimental data is not convenient to measure. In addition, because of the computer technology developed rapidly, and the modern design technology has been widely applied to the design and manufacture of engine. This design put the four-stroke gasoline engine underneath type valve-train CAM as an example. On the basis of the design and development experience at home and abroad for reference use the pro/e to do the valve-train CAM motion simulation, then give advise base on the results of the analysis. Keywords: The engine, The valve body, CAM, Motion simulation, pro/e software目录1 绪论 (4)1.1研究背景及意义 (4)1.2国内外对气门机构的研究进展和缺陷 (5)1.2.1凸轮轴气门驱动机构 (5)1.2.2 无凸轮轴驱动气门机构 (6)1.3本设计主要内容 (9)2 配气机构结构原理 (10)2.1配气机构的机构及其组成 (10)2.2 气门机构的分类 (10)2.2.1按气门的布置分类 (10)2.2.2 按凸轮轴的布置型式分类 (11)2.3 凸轮轴的传动方式 (11)2.4 配气相位 (12)3 配气机构的运动学分析 (14)3.1.由挺柱运动规律求气门的理论运动规律: (14)3.2球面挺柱运动规律与凸轮轮廓的关系 (19)4 运用pro/e建立模型 (25)4.1 pro/e简介 (25)4.2 配气机构建模的具体步骤 (25)4.2.1 零件建模 (25)4.2零件的装配 (32)4.3本章总结 (36)5 配气机构的运动仿真与分析 (37)5.1 机构连接定义 (37)5.1.1凸轮连接定义 (37)5.1.2弹簧定义 (38)5.2运动仿真 (39)5.2.1 添加电机 (39)5.2.2机构分析定义 (40)5.3运动仿真及数据测量 (40)5.4结果分析 (43)5.5改进凸轮模型 (43)6 结论 (46)参考文献 (47)致谢 (48)1 绪论1.1研究背景及意义随着时代的发展,人们越来越重视汽车的节能和环保。
TurboC4190内燃机动力学模拟仿真课程设计

<<内燃机课程设计>>目录一、4190型柴油机题目条件二、4190型柴油机热力计算及结果1、柴油机参数选择2、热力计算源程序代码3、热力计算结果4、热力计算示功图三、4190型柴油机动力计算及结果1、柴油机的已知参数2、动力计算源程序代码3、主要参数计算结果4、P—φ示功图5、活塞位移变化曲线图6、活塞速度变化曲线图7、活塞加速度变化曲线图8、往复惯性力变化曲线图9、总作用力变化曲线图10、活塞侧推力和连杆力变化曲线图11、法向力和切向力变化曲线图12、单缸机转矩变化曲线图13、曲柄销和主轴颈负荷变化曲线图14、总转矩变化曲线图15、动力学计算结果一、4190型柴油机题目条件缸径: D=190mm行程: S=210mm缸数: i=4转速: n=1600r/min连杆长度: L=370mm冲程数:四冲程二、4190型柴油机热力计算及结果1、柴油机参数选择压缩比:ε=15大气状态: P0=0.10MPa T=293K燃料平均重量成分: C=0.86 H=0.13 O=0.01 燃油低热值: Hu=42705kj/kg过量充气系数:Φa=1.6气体爆发压力: Pz=6.5MPaz点的热利用系数:ζz=0.65b点的热利用系数:ζb=0.8残余废气系数:Φ=0.03残余废气温度: Tr=750K机械效率:ηm=0.80空气进入气缸的温度升高:ΔT=5℃c点的热利用系数:ζc=1.112、热力计算源程序代码#include "graphics.h"#include "conio.h"#include "dos.h"#include "math.h"void draw(n1,Pa,s1,n2,Pb,l,p,Pz)float n1,Pa,s1,n2,Pb,l,p,Pz;{float k,j;int gdriver,gmode,i,x,y,r,L=500,B=40,u,z;gdriver=DETECT;initgraph(&gdriver,&gmode,"");setbkcolor(15); setcolor(8); cleardevice();line(20,55,20,410); line(20,410,600,410);line(20,55,17,65); line(20,55,23,65);line(600,410,590,407); line(600,410,590,413);gotoxy(2,4); printf("p");gotoxy(2,5); printf("/");gotoxy(2,6); printf("MPa");k=(float)(L/s1); u=L; z=(int)(B*Pa);gotoxy(1,2); printf("mapl-l 6160");x=L;r=(int)(B*Pa*pow((float)L/x,n1));u=x;z=r;for(x=L;x>=(int)(k);x--){r=(int)(B*Pa*pow((float)L/x,n1));line(u,400-z,x,400-r);u=x,z=r;}line(x+1,400-r,(int)(p*L/s1-1),(int)(400-B*Pz));j=(float)(L/l); u=L; z=(int)(B*Pb);moveto(505,415); outtext("V*10e-4/(m*m*m)");y=L;r=(int)(B*Pb*pow((float)L/y,n2));u=y; z=r;for(y=L;y>=(int)j;y--){r=(int)(B*Pb*pow((float)L/y,n2));line(u,400-z,y,400-r);u=y;z=r;}gotoxy(6,4);printf("z");moveto(505,375);outtext("a");moveto(25,250); outtext("c");moveto(505,400);outtext("b");arc(L,400-(int)(B*(Pa+(Pb-Pa)/2)),270,450,(int)(B*(Pb-Pa)/2));getch();closegraph();}void main(){float Hu=42705,D=190,S=210,N=1600,gc=0.86,gh=0.13,go=0.01;float Pz=6.0,a=1.6,sz=0.65,sb=0.80,Rr=0.03,Tr=750,Qm=0.80,s=15,P0=0.1,T0=300;float T1=5,sc=1.11,a2=19.26,b=0.0025,o=0.98;float Ta,Pa,Qv,n1,n2,m,n,Tc,Pc,L0,L,gi,B,B0,Xz,Bz,Cvpmx,Cppmx,Cvpmc,Cvpmz,Cvpmb, Cv1,Cv11,Cv2,Va,Tz,Tb,Tk,k,l,Pb,Pk,Pi1,Pi,Qi,ge,Qe,Pe,Cm,Hu1,Cppmz,p,Bb;printf("********************************\n");Ta=(T0+T1+sc*Rr*Tr)/(1+Rr);Pa=0.9*P0;Qv=s*T0*Pa/((s-1)*Ta*P0*(1+Rr));printf("Ta=%fK\n;Pa=%fMPa\n",Ta,Pa);printf("Qv=%f\n",Qv);n1=1.38;do{m=n1;n1=1+8.315/(a2+b*Ta*(1+pow(s,(m-1))));}while(fabs(m-n1)>0.0001);printf("n1=%f\n",n1);Tc=Ta*pow(s,n1-1);Pc=Pa*pow(s,n1);L0=(gc/12+gh/4-go/32)/0.21;L=a*L0;B0=1+0.0639/a;B=(B0+Rr)/(1+Rr);Xz=sz/sb;Bz=1+(B0-1)*Xz/(1+Rr);printf("Tc=%fk\n;Pc=%fMPa\n",Tc,Pc);Cv2=19.26+0.0025*Tc;Cv11=20.47+0.0036*Tc;Cvpmc=((1.064+Rr)*Cv11+(a-1)*(1+Rr)*Cv2)/(a*(1+Rr)+0.064);Tb=293;Cv1=19.26+0.0025*Tb; Cv11=20.47+0.0036*Tb;Cvpmb=((1.064+Rr)*Cv11+(a-1)*(1+Rr)*Cv1)/(a*(1+Rr)+0.064);Hu1=Hu+L*(1+Rr)*(B*Cvpmb-Cv1)*293;printf("Hu1=%fkJ/kg\n",Hu1);k=Pz/Pc;Tb=1200;Cv1=19.26+0.0025*Tb; Cv11=20.47+0.0036*Tb;Cvpmb=((1.064+Rr)*Cv11+(a-1)*(1+Rr)*Cv1)/(a*(1+Rr)+0.064);n=2200;do{Tz=n;Cv1=19.26+0.0025*Tz; Cv11=20.47+0.0036*Tz;Cvpmz=((1.064*Xz+Rr)*Cv11+(a*(1+Rr)-(Xz+Rr))*Cv1)/(a*(1+Rr)+0.064*Xz);Cppmz=Cvpmz+8.315;n=(sz*Hu1/(a*L0)+(Cv2+8.315*k)*Tc+Rr*(Cvpmc+8.315*k)*Tc)/(Bz*(1+Rr)*Cppmz);}while (fabs(Tz-n)>0.0001);printf("Tz=%fK\n",Tz);p=B*Tz/(k*Tc);l=s/p;Tb=1200;do{m=Tb;Cv1=19.26+0.0025*Tb; Cv11=20.47+0.0036*Tb;n2=8.315*(Tz-Tb)/((sb-sz)*Hu1/((1+Rr)*L*B)+Tz*Cvpmz-Cvpmb*Tb)+1;Tb=Tz*B/(Bz*pow(l,n2-1));}while(fabs(m-Tb)>0.01);printf("Tb=%fK\n;n2=%f\n",Tb,n2);Pb=Pz/pow(l,n2);printf("Pb=%fMpa\n",Pb);(float)Pi1=Pc*(k*(p-1)+k*p*(1-1/pow(l,n2-1))/(n2-1)-(1-1/pow(s,n1-1))/(n1-1))/(s-1); Pi=Pi1*o;gi=12.54e6*Qv*P0/(28.96*L*T0*Pi);Qi=3600.0*1000.0/(gi*Hu);Pe=Pi*Qm; ge=gi/Qm; Qe=Qi*Qm;printf("Pil=%fMPa\n;Pi=%fMPa\n;gi=%fg/kW.h\n;Qi=%f\n",Pi1,Pi,gi,Qi);printf("Pe=%fMPa\n",Pe);printf("ge=%fg/kW.h\n;Qe=%f\n",ge,Qe);printf("*************************\n");getch();draw (n1,Pa,s,n2,Pb,l,p,Pz,Pc);}3、热力计算结果4、热力计算示功图三、4190型柴油机动力计算及结果1、柴油机的已知参数转速: n=1600r/min连杆长度: L=370活塞组质量: mB=3.207连杆质量: mL=3.95连杆中心到小头的距离: LB 230曲柄销质量: mZ=2.47一半曲臂质量: mH=4.11曲臂偏心矩: pp=85.0曲柄半径: r=92.5许用不匀度: dd=2.0/100)压缩比: E=15平均压缩多变指数: n1=1.37平均膨胀多变指数: n2=1.216气体爆发压力: Pz=7.0外界气压: Pa=0.092、动力计算源程序代码##include"stdio.h"#include"math.h"#include"conio.h"#include"graphics.h"#define n 1600#define L 370#define mB 3.207#define mL 3.95#define LB 230#define mZ 2.47#define mH 4.11#define pp 100#define r 92.5#define dd (2.0/100.0)#define E 15#define fn 1.392#define n1 1.37#define n2 1.216#define q 13.287#define Pz 7.0#define Pa 0.09#define Pb 0.32#define PI 3.141592654#define kk 92.5/370int i,j,xx,yy;char s[30];double x1,x2,y1,y2,k,k1;float aa[253],zz[106];/* 已知条件 */void f_print(){ textbackground(0);clrscr();textcolor(2);window(4,4,25,70);printf("\n\n\n");printf("\n");printf("known data:\n");printf("\n\n");printf("connecting rod length L=450mm\n\n");printf("piston quality: mB=4.8kg\n\n");printf("connecting rod quality mL=7.2kg\n\n");printf("rod center to small point head: LB=315\n\n");printf("qu bing xiao quality: mZ=3.0kg\n\n");printf("(half) qu bi quality: mH=5.0kg\n\n");printf("qu bi zhi xin pian xin ju: p=120mm\n\n");printf("xu yong bu jun du: [\xeb]=2.0/100.0\n\n"); getch(); }/*屏幕模式*/void f_mode(){ int gd=DETECT, gm;initgraph(&gd,&gm,"c:\\TC20\\BGI");}void fun_ft(int ft,int fd,int ti,float tt, float ts){ setcolor(3);settextjustify(1,1);settextstyle(2,0,4);for(i=0;i<ti;i++){ line (60,ft-i*fd,63,ft-i*fd);sprintf (s,"%.lf",-1.0*tt+i*ts);outtextxy(40,ft-i*fd,s);} }void fun_camp(int x3,int y3,int x4,int y4){settextjustify(1,1);settextstyle(2,0,5);outtextxy(x3,y3,"(MPa)");settextstyle(2,0,5);outtextxy(x4,y4,"ca");}void fun_caNm(int x3,int y3,int x4,int y4) {settextjustify(1,1);settextstyle(2,0,5);outtextxy(x3,y3,"(Nm)");settextstyle(2,0,5);outtextxy(x4,y4,"ca");}/* 画xy坐标轴 */void f_zb(int my,int by,int dx,int BB) {setbkcolor(15);setcolor(1);cleardevice();setcolor(1);setlinestyle(0,0,2);line(60,10,60,by);line(60,my,590,my);moveto(60,0);lineto(62,14);lineto(58,14);lineto(60,0);floodfill(60,51,1);moveto(590,my);lineto(578,my-2);lineto(578,my+2);lineto(590,my);floodfill(580,my,1);settextjustify(1,1);settextstyle(2,0,4);for(i=1;i<13;i++){line(60+i*dx,my,60+i*dx,my-3);sprintf(s,"%d",i*BB);outtextxy(60+i*dx,my+6,s);}settextstyle(2,0,5);outtextxy(66,my+6,"0");getch(); }/* 气体压力与转角的关系 */void f_Gca(){float vc,x3;vc=185/(E-1);k=r/L/4.0;settextjustify(1,1);settextstyle(2,0,8);outtextxy(40,54,"P");settextstyle(2,0,5);outtextxy(40,60,"G");fun_camp(40,76,600,405);fun_ft(400,26,12,0,1);setcolor(1);moveto(186,400-Pa*26);for(i=126;i<253;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1)));x3=(vc+185)/(vc+x2);y1=19*Pa*pow(x3,n1);xx=i+60;yy=400-(int)y1;lineto(xx,yy);}for(i=256;i<379;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1)));x3=(vc+x2)/vc;y1=x3/fn;y2=19*Pz/pow(y1,n2);xx=i+60;yy=408-(int)y2;lineto(xx,yy);}lineto(443,400);getch();}/*活塞位移与转角的关系*/void f_Xca(){setcolor(1);settextjustify(1,1);settextstyle(2,0,4);fun_ft(400,20,20,0,20);settextstyle(2,0,8);outtextxy(75,10,"x");settextstyle(2,0,4);outtextxy(75,25,"(mm)");settextstyle(2,0,6);outtextxy(600,385,"ca");setcolor(1);moveto(60,400);for(i=0;i<505;i++){x1=i*PI/(6*42);x2=1-cos(x1)+(1-cos(2*x1))*kk/4; xx=60+i;y1=92.5*x2;y2=400-y1;yy=(int)y2;lineto(xx,yy);}getch();}/*活塞速度与转角的关系*/void f_vca(){setcolor(1);settextstyle(2,0,8);outtextxy(75,10,"x");circle(75,5,1.5);settextstyle(2,0,6);outtextxy(600,245,"ca"); settextjustify(1,1);settextstyle(2,0,4);outtextxy(75,25,"(m/s)");fun_ft(490,50,10,10,2.0); setcolor(1);moveto(60,240);for(i=0;i<505;i++){x1=i*PI/252;x2=sin(x1)+kk*sin(2*x1)/2;xx=60+i;y1=175*x2;y2=240-y1;yy=(int)y2;lineto(xx,yy);}getch();}/*活塞加速度与转角的关系*/void f_aca(){setcolor(1);settextstyle(2,0,8);outtextxy(80,10,"x");circle(78,5,1.5);circle(82,5,1.5);settextstyle(2,0,6);outtextxy(595,270,"ca"); settextjustify(1,1);settextstyle(2,0,4); outtextxy(105,15,"(m/s)"); settextstyle(2,0,2); outtextxy(115,15,"2"); settextjustify(1,1); settextstyle(2,0,4);fun_ft(370,13,22,1000,100); setcolor(1);moveto(60,260-132*(1+kk)); for(i=0;i<505;i++){x1=i*PI/252;x2=cos(x1)+kk*cos(2*x1);xx=60+i;y1=92.5*x2;y2=260-y1;yy=(int)y2;lineto(xx,yy);}getch();}/* 往复惯性力曲线 */void f_Pjca(){setcolor(1);fun_camp(36,50,595,235); settextjustify(1,1); settextstyle(2,0,4);fun_ft(400,45,8,0.4,0.1); settextjustify(0,1); settextstyle(2,0,6); outtextxy(320,60,"Pj1"); outtextxy(320,100,"Pj"); outtextxy(320,140,"Pj2"); setcolor(1);moveto(60,360);for(i=0;i<505;i++){x1=i*PI/126;x2=cos(x1);xx=60+i;y1=220+100*x2;yy=(int)y1;lineto(xx,yy);}line(200,125,310,60); setcolor(7);moveto(60,220+100*kk);for(i=0;i<505;i++){x1=i*PI/126;x2=cos(2*x1);xx=60+i;y1=220+kk*100*x2;yy=(int)y1;lineto(xx,yy);}line(255,195,310,140); setcolor(5);moveto(60,220+60*(1+kk));for(i=0;i<505;i++){x1=i*PI/126;x2=cos(x1)+kk*cos(2*x1);xx=60+i;y1=220+100*x2;yy=(int)y1;lineto(xx,yy);}line(240,172,310,100); getch();}/* 活塞受载荷变化曲线 */void f_Pca(){float vc,x3,x4,x5,y3,y4;vc=185.0/(E-1);k=r/L/4.0;setcolor(8);fun_camp(30,65,595,410);fun_ft(492,46,12,2,1); settextjustify(1,1); settextstyle(2,0,4);setcolor(13);settextstyle(2,0,6);outtextxy(450,100,"PG"); outtextxy(500,230,"P"); outtextxy(550,260,"Pj");line(327,170,425,105);line(350,370,485,235);line(460,388,535,265); setcolor(1);moveto(60,400+20*(1+kk));for(i=0;i<505;i++){x1=i*PI/126;x2=cos(x1)+kk*cos(2*x1);xx=60+i;y1=20*x2;yy=400+(int)y1;j=(int)(i/2.0);aa[j]=-y1;if(i>169&&i<383){setcolor(5);lineto(xx,yy);}setcolor(8);lineto(xx,yy);}setcolor(8);moveto(188,400-Pa);for(i=126;i<253;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1))); x3=(vc+225)/(vc+x2);y1=32*Pa*pow(x3,n1);j=(int)(i/2.0);aa[j]=aa[j]+0.5*y1-3;xx=i+60;yy=403-(int)y1;lineto(xx,yy);}for(i=253;i<379;i++){x1=i*PI/126;x2=r*(1-cos(x1)+k*(1-cos(2*x1))); x3=(vc+x2)/vc;y1=x3/fn;y2=32*Pz/pow(y1,n2);j=(int)(i/2.0);aa[j]=aa[j]+0.5*y2-6;xx=i+60;yy=410-(int)y2;lineto(xx,yy);}lineto(445,400);setcolor(8);moveto(215,385);for(i=168;i<379;i++){xx=i+60;j=(int)(i/2.0);yy=400-(int)aa[j];lineto(xx,yy);} lineto(443,385);getch();}/*piston ce xiang ya li and conneting-rod force*/ void f_Ntca(){ int j;setcolor(1);fun_camp(36,65,595,296);fun_ft(400,40,11,3,1);setcolor(8);settextstyle(2,0,7);outtextxy(450,160,"Pcr");outtextxy(480,200,"PN");line(340,218,430,165);line(393,280,465,205);setcolor(4);moveto(60,280); /*PN*/for(i=0;i<505;i++){x1=asin(92.5*sin(i*PI/126)/370.0);x2=tan(x1);xx=i+60;j=(int)(i/2.0);y1=1.0*aa[j]*x2;yy=280-(int)y1;lineto(xx,yy);}setcolor(13); /*Pcr*/moveto(60,334);for(i=0;i<505;i++){x1=asin(92.5*sin(i*PI/126)/370);x2=1.0/cos(x1);xx=i+60;j=(int)(i/2.0);y1=1.0*aa[j]*x2;yy=280-(int)y1;lineto(xx,yy);}getch();}/*曲柄销载荷变化曲线*/void f_Zca(){float x3;setcolor(1);fun_camp(36,65,595,295);fun_ft(400,40,11,3,1);setcolor(8);settextstyle(2,0,7);outtextxy(450,160,"PI");outtextxy(480,200,"Pra");line(332,190,435,165);line(400,270,460,205);setcolor(13);moveto(60,333);for(i=0;i<505;i++){x1=1.0*i*PI/126;x2=asin(92.5*sin(x1)/370.0);x3=cos(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3;yy=280-(int)y1;lineto(xx,yy);}getch();}void f_Tca(float kn){float x3;setcolor(1);moveto(60,280);for(i=0;i<505;i++) /*曲轴销处切向力*/ {x1=i*PI/126;x2=asin(92.5*sin(x1)/370);x3=sin(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3*kn;yy=280-(int)y1;lineto(xx,yy);}getch();}/*主轴径载荷变化曲线*/void f_Rca(){float x3,x4,y3;fun_ft(380,50,9,0,0.5);fun_camp(36,65,595,395);setcolor(8);settextstyle(2,0,7);outtextxy(500,140,"Ra");outtextxy(500,180,"Ro");line(440,253,485,145);line(470,245,485,195);setcolor(1);moveto(60,213);for(i=0;i<505;i++) /*曲轴销处总支反力*/{x1=i*PI/126;x2=asin(92.5*sin(i*PI/126)/370.0);x3=sin(x1+x2)/cos(x2);x4=cos(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3;y2=aa[j]*x4;y3=sqrt(pow(y1,2)+pow((y2-4),2));yy=272-(int)y3;lineto(xx,yy);}setcolor(6);moveto(60,203);for(i=0;i<505;i++) /*主轴径处总支反力*/ {x1=i*PI/126;x2=asin(92.5*sin(i*PI/126)/370.0);x3=sin(x1+x2)/cos(x2);x4=cos(x1+x2)/cos(x2);xx=i+60;j=(int)(i/2.0);y1=aa[j]*x3;y2=aa[j]*x4;y3=sqrt(pow(y1,2)+pow((y2-20),2));yy=277-(int)y3;lineto(xx,yy);}getch();}/* 单缸输出转矩变化曲线 */void f_Mca(){ fun_ft(355,25,12,30000,10000);fun_caNm(36,65,595,328);setcolor(8);outtextxy(380,120,"Mt");f_Tca(1.9);getch();}/*total jia qie li arc */void f_Timm(){fun_camp(36,65,595,328);fun_ft(382,31,10,0.6,0.3);}void f_Tica(){ int kt,jt;float x3,x4,x5,kj=0.0;setcolor(1);moveto(60,290);for(i=0;i<505;i++) /* Ti */ {x5=0.0;for(kt=0;kt<4;kt++){ x1=126.25*kt+i;if(x1>504)x1=x1-504;j=(int)(x1/2.0);x2=(x1)*PI/126;x3=asin(kk*sin(x2));x4=sin(x2+x3)/cos(x3);x5=x5+x4*aa[j];}xx=i+60;y1=x5*2;kj=kj+y1;yy=320-(int)y1;lineto(xx,yy);}kt=kj/504.0;getch();}/*多缸机输出转矩曲线*/void f_Mdca(){int kt;float sc,x3,x4,x5;fun_caNm(36,65,595,328);fun_ft(395,25,10,30000,10000);f_Tica();setcolor(8);outtextxy(380,120,"T Mt");setcolor(6);line(60,320-k,564,320-k);for(i=0;i<504;i++) /*T Mt*/{x5=0.0;for(kt=0;kt<4;kt++){x1=126*kt+i;if(x1>504)x1=x1-504;j=(int)(x1/2.0);x2=(x1)*PI/126;x3=asin(kk*sin(x2));x4=sin(x2+x3)/cos(x3);x5=x5+x4*aa[j];}xx=i+60;y1=x5*6;sc=y1-k;if(i>50){if(sc<0.5) break;}k1=fabs(sc);}k1=28*k1;getch();}/* output result of calculate*/void f_fprin(){ float mA,x3,x4,y3,y4,I0,I1,I2,I3; textbackground(1);clrscr();textcolor(6);window(4,4,25,70);mA=mZ+2.0*mH*pp/r;x1=0.001*r*(mA+1.716)*pow((PI*n/30),2);x2=0.001*r*mL*LB/L*pow((PI*n/30),2);printf("\n\n");printf("li xin guan xing li Pr :\n\n\n"); printf(" Pr=%.3fN",x1);printf(" PrB =%.3fN\n\n",x2); I2=(mA+mL*LB/L)*pow(0.0925,2);I3=(mB+mL*(L-LB)/L)*pow(0.0925,2)/2.0;I0=k1/(pow((n*PI/30),2)*dd);I1=4*(I0-I2-I3);printf("flying wheel zhuan dong guan liang :I1\n");printf(" I1=%.3f",I1); getch();}main(){f_print();f_mode();f_zb(400,460,42,60);f_Gca();f_zb(400,460,42,30);f_Xca();f_zb(240,460,42,30);f_vca();f_zb(240,460,42,30);f_aca();f_zb(220,460,42,60);f_Pjca();f_zb(400,460,42,60);f_Pca();f_zb(280,460,42,60);f_Ntca();f_zb(280,460,42,60);f_Tca(1.0);f_Zca();f_zb(380,460,42,60);f_Rca();f_zb(280,460,42,60);f_Mca();f_zb(320,460,42,60);f_Timm();f_Tica();f_zb(320,460,42,60);f_Mdca();getch();closegraph();f_fprin();}3、主要参数计算结果4、P—φ示功图5、活塞位移变化曲线图6、活塞速度变化曲线图7、活塞加速度变化曲线图8、往复惯性力变化曲线图9、总作用力变化曲线图10、活塞侧推力和连杆力变化曲线图11、法向力和切向力变化曲线图12、单缸机转矩变化曲线图13、曲柄销和主轴颈负荷变化曲线图14、总转矩变化曲线图15、动力学计算结果。
发动机运动仿真初级教程

汽车发动机运动仿真及视频制作今天,小狼心情一片大好,特此来说说发动机的总装分析和动画制作(为了简化电脑负荷,对于很多的零件和标准件并没有加载,而且在最后的仿真时,凸轮机构怎么也设置不成功,此处望各位客观不要介意),对于做好的视频和原发动机素材在西北狼(qq:164874561)空间,以及雪绒花机械设计(200823299)提供下载。
(1),首先我们建立一个装配体,将中间箱体用默认方式加。
(2)为了装配的方便再建立一个子装配,通过任意两个基准面,生成一个基准轴,将曲轴加载进子装配,此处注意定位方式,一定要选择销连接(要不然后面动不了切没办法加载电机)面重合,完成销的定义。
(3),再次建立二级子装配,将活塞以默认的方式加载进来,同时将曲柄机构加载进来,这里为了定位的准确,小狼先将曲柄自动放置,然后对于曲柄的小轴测量,同时对活塞的配合部位测量,得出数据以后完成销的定义,将活塞和连杆用销指令连接起来,为了检测装配的合理性,我们用拖动指令对连杆进行任意方向的拖动,看看连杆是否达到我们预期想要的运动状态,如果不合适立马调整,因为在后期调整会相当麻烦,如果没问题保存,退出。
(4),将刚刚建立的曲柄连杆加载进一级子装配里面来,此处注意连接方式,此处我们采用圆柱指令,至于为什么不用销指令,请各位读者自行分析,完成四个活塞连杆的装配,拖动验证,保存退出。
(5),将刚刚组装好的曲轴活塞连杆系统加载进刚开始建立的装配体中来,这儿的装配指令比较难理解,操作也很麻烦,方向需要反复调整,第一个指令,我们采用销命令,将曲轴和箱体的位置定下来,此时,我们的定位工作还没有完成,还需要对于四个活塞用圆柱指令放置在对应的活塞孔里(注意方向)。
所以对于这个系统的完整装配需要五个指令如下图,干涉检查(以计算机性能而定),拖动仿真,保存,将机油箱加载进来(也可以不加载,因为我们此处重在讲解运动分析,关注重点是能动的构件,而不动的只会增加计算机负担)保存退出。
发动机运动仿真

发动机实体建模及运动仿真学生:陈柯佛指导老师:邓先智目录摘要 (4)前言 (5)1.发动机的简介 (6)1.1发动机的发展历史及前景 (6)1.2发动机的种类 (7)2.运动仿真技术简介 (9)2.1运动仿真技术产生的背景 (9)2.2运动仿真技术 (9)2.3运动仿真技术在国内外的发展概况 (10)2.4 发展运动仿真技术的重要意义 (11)3.Pro/E软件简介 (11)3.1 Pro/E软件的基本功能及作用 (12)4.发动机主要零件三维实体建模 (14)4.1零件建模 (14)4.1.1曲轴的生成 (15)4.1.2曲轴箱体的生成 (16)4.1.3下曲轴箱盖 (17)4.1.4连杆 (18)4.1.5 活塞 (19)4.1.6 飞轮 (19)5.零件装配 (20)5.1 新建装配模型 (22)5.2 组装机构模型 (22)6.发动机运动仿真 (38)6.1概述 (38)6.2定义仿真与分析 (38)6.2.1 定义伺服电动机 (39)6.2.3 定义机构分析 (44)6.2.4 测量活塞的速度 (46)7.结论 (49)摘要发动机是一种应用广泛的传递动力的机器,把能量转化为机械能额装置。
目前的传统的发动机都是将燃料的化学能变为热能,再由热能转变为机械动力,并通过底盘的传动系和行驶系驱动汽车行驶。
有其广泛的空间,但由于发动机传统开发模式存在的开发周期长、过程繁杂、开发成本高、性能测试困难等问题,本文将仿真技术引入发动机开发领域,完成以下工作:1.介绍了发动机的发展历史及前景,发动机的种类,介绍了仿真技术的产生的背景、在国内的发展状况及仿真技术的实际意义。
2.简述了pro/E软件在工程设计中的应用,利用pro/E构建发动机的三维实体模型,并对其进行装配。
3.在pro/E进行运动仿真。
关键词:发动机仿真技术三维建模前言随着机械行业的迅速发展和市场竞争的日益激烈,如何提高产品品质,增强产品的市场竞争能力,缩短产品开发周期,降低成本已成为企业十分重视的问题。
关于发动机NVH仿真精选全文完整版

精选全文完整版关于发动机NVH仿真-AVL EXCITE计算发动机NVH的EXCITE仿真DrLan建立在AVL EXCITE和有限元软件的基础上,根据发动机NVH的不同关注内容,简要地叙述如下:一. 发动机悬置优化1.方法:悬置系统固有特性计算、解耦分析、多体动力学强迫振动计算2.软件:EXCITE(发动机强迫振动计算)、Matlab(或其它数学工具,方便地计算悬置系统固有特性)、有限元软件(简易连杆和简单弹性体曲轴缩减)3.计算总体时间:短(主要是因为动力总成可考虑成质点或质点组合,一般用3D的CAD 模型测得,无需有限元网格)4.输入数据:(1).悬置特性(试验测得)和位置:非线性刚度和阻尼(2).发动机基本参数(缸径、行程、转速、燃气压力曲线等)(3).连杆和活塞质量数据:快速产生简易模型(4).曲轴(含飞轮、皮带轮或扭振减振器等):3维CAD模型,快速产生弹性体简易模型(5).动力总成质量数据和基本几何尺寸:刚性体模型,由质点表述5.结果评价:(1).用Matlab构建悬置发动机系统,计算悬置系统固有频率,计算临界转速、了解各方向的耦合状况,分析解耦方案(通过改变悬置位置、悬置刚度、调整动力总成质量分布等等)(2).EXCITE计算悬置发动机侧的振动(三向的位移、速度、加速度),以及悬置力,避免发动机整个转速工况内的悬置共振,避免过大的悬置动态变形,避免过大的悬置内力(3).EXCITE计算得到发动机各处的位移结果,确保限位要求6.模型难度:易(适用于整机厂和整车厂的悬置匹配方案制订)7.模型深度:(1).考虑悬置系统特性(由试验测得的橡胶悬置或液压悬置特性),方便修改悬置点位置和方向的定义,快速重新计算(2).考虑多缸机的燃气力、往复和旋转惯性力、倾覆力矩等(3).考虑轴承间隙、高速飞轮陀螺效应等非线性激励的影响(4).可考虑调整平衡率,或使用平衡轴等,定义方便(5).结合底盘和整车悬架系统固有频率(模态分析或试验),避免共振(6).等8.计算精度:适合于悬置的选择和匹配,精度较高二. 发动机整机(即动力总成)振动优化1.方法:动力总成等有限元模态分析、弹性体多体动力学强迫振动计算2.软件:EXCITE(发动机强迫振动计算)、有限元软件(动力总成、简易连杆和简单弹性体曲轴缩减)3.计算总体时间:较长(主要是动力总成的有限元网格划分)4.输入数据:(1).悬置特性(试验测得)和位置:可考察非线性刚度和阻尼特性(2).发动机基本参数(缸径、行程、转速、燃气压力曲线等)(3).连杆和活塞质量数据:快速产生简易模型(4).曲轴(含飞轮、皮带轮或扭振减振器等):三维CAD模型,快速产生弹性体简易模型(5).动力总成有限元网格和缩减:包括机体、缸头、缸盖、油底壳、附件等5.结果评价:(1).结构模态有限元分析,特别关注动力总成在1000Hz以内的Global模态成分及其临界转速,分析它们对悬置和发动机振动可能带来的影响(2).EXCITE计算获得悬置发动机侧的振动(三向的位移、速度、加速度)、悬置力等结果,同时还可进行轴系扭振、曲轴和机体强度、液体动力学轴承计算、整机噪声分析等,是一个较为完整的发动机动力学模型(3).避免在发动机整个转速工况内的系统共振,避免过大的悬置动态变形,避免过大的悬置内力,还可评价整机振动烈度等相关内容(4).本EXCITE计算得到的整机振动响应,考察了悬置发动机系统固有特性、弹性体动力总成模态、激励频率成分及其强度,以及它们之间可能的耦合关系等6.模型难度:中(国内已有多家进行了成功计算,适用于发动机厂的发动机振动控制,整车厂的高精度的悬置匹配分析等)7.模型深度:(1).定义橡胶悬置或液压悬置特性(特性本身由试验测得)(2).考察动力总成模态的影响,包括悬置布置、整机质量布置、整机刚度状况、模态和频率状况(3).考虑多缸机的燃气力、往复和旋转惯性力、倾覆力矩,以及轴承间隙、高速飞轮陀螺效应等非线性激励的影响(4).可考虑调整平衡率,或使用平衡轴等,定义较为方便(5).结合底盘或汽车悬架系统的固有频率(模态分析或试验),避免共振(6).其它内容:轴系扭振、曲轴和机体强度、液体动力学轴承计算、整机噪声分析,等8.计算精度:适合于发动机振动计算分析,悬置匹配计算等,精度高三. 发动机整机和底盘耦合振动优化1.方法:动力总成、底盘等有限元模态分析、弹性体多体动力学强迫振动计算2.软件:EXCITE(发动机强迫振动计算)、有限元软件(底盘、动力总成、简易连杆和简单弹性体曲轴缩减)3.计算总体时间:很长(主要是动力总成和部分底盘的有限元网格划分,以及整车悬架系统参数的获取等。
发动机模型仿真
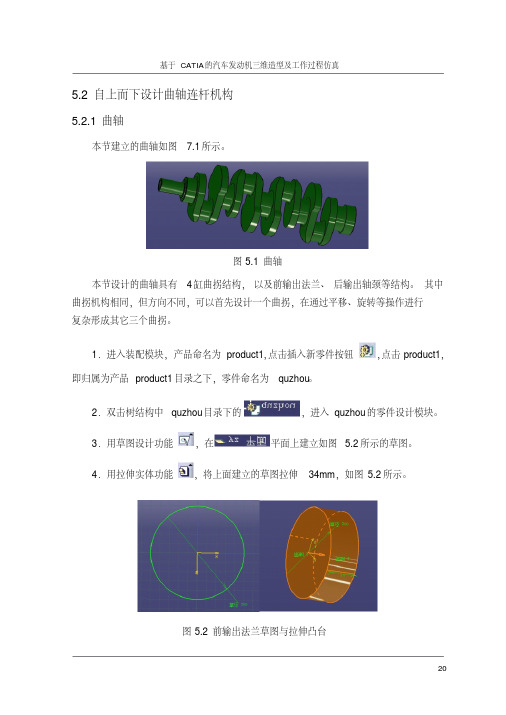
5.2自上而下设计曲轴连杆机构5.2.1曲轴本节建立的曲轴如图7.1所示。
图5.1曲轴本节设计的曲轴具有4缸曲拐结构,以及前输出法兰、后输出轴颈等结构。
其中曲拐机构相同,但方向不同,可以首先设计一个曲拐,在通过平移、旋转等操作进行复杂形成其它三个曲拐。
1.进入装配模块,产品命名为product1,点击插入新零件按钮,点击product1,即归属为产品product1目录之下,零件命名为quzhou。
2.双击树结构中quzhou目录下的,进入quzhou的零件设计模块。
3.用草图设计功能,在平面上建立如图 5.2所示的草图。
4.用拉伸实体功能,将上面建立的草图拉伸34mm,如图5.2所示。
图5.2前输出法兰草图与拉伸凸台5.用钻孔功能,在上面建立的拉伸实体的端面上建立沉头孔,在对话框中单击“定位草图”按钮,定位孔的中心如图 5.3所示。
定义孔对话框中的延伸选项页如图5.4所示,类型选项页如图 5.5所示。
图5.3定位圆柱销孔图5.4孔定义对话框图5.5孔类型对话框6.用钻孔功能,在上一步建立的端面上,建立一个螺纹口。
螺纹口中心定位如图5.6所示,约束孔中心时,用直线功能,再标注尺寸如图 5.7所示。
在定义孔对话框中,类型选项页设置如图 5.8所示,螺纹定义选项页设置如图 5.9所示。
图5.6定位螺纹孔图5.7孔类型对话框图5.8螺纹孔定义对话框7.用圆形阵列功能,以上一步的到的螺纹孔特征为旋转对象,绕X轴旋转,旋转步长为50°,生产7个实例,对话框设置如图 5.9所示,生成的整列如图 5.10所示。
注意旋转的方向,如果方向不对,可以单击按钮改变阵列方向。
图5.9定义圆形整列图5.10阵列孔8.用草图设计功能,在上面建立的实体的没有开孔的一侧建立如图 5.11所示的草图。
9.用拉伸实体功能,将上一步建立的草图拉伸36mm,如图5.11所示。
图5.11与法兰连接处草图与拉伸凸台10.用草图设计功能,在上建立如图 5.12所示的草图。
发动机仿真设计报告书
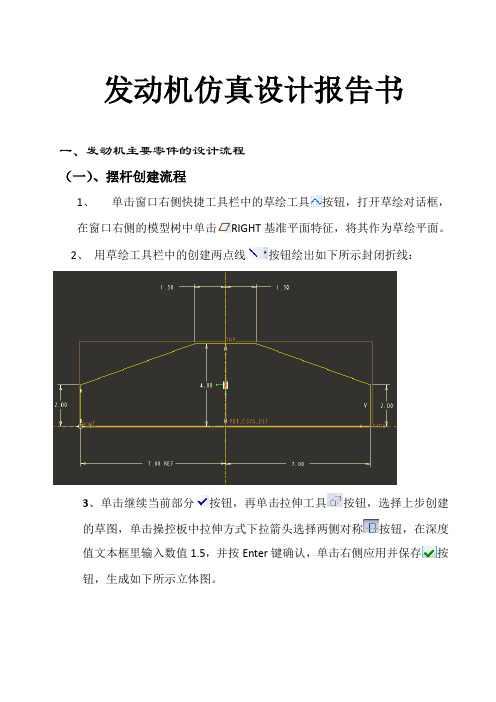
发动机仿真设计报告书一、发动机主要零件的设计流程(一)、摆杆创建流程1、单击窗口右侧快捷工具栏中的草绘工具按钮,打开草绘对话框,在窗口右侧的模型树中单击RIGHT基准平面特征,将其作为草绘平面。
2、用草绘工具栏中的创建两点线按钮绘出如下所示封闭折线:3、单击继续当前部分按钮,再单击拉伸工具按钮,选择上步创建的草图,单击操控板中拉伸方式下拉箭头选择两侧对称按钮,在深度值文本框里输入数值1.5,并按Enter键确认,单击右侧应用并保存按钮,生成如下所示立体图。
4、单击窗口右侧快捷工具栏中的草绘工具按钮,打开草绘对话框,单击使用先前的按钮,绘出如下所示矩形5、单击继续当前部分按钮,再单击拉伸工具按钮,选择上步创建的草图,单击操控板中拉伸方式下拉箭头选择两侧对称按钮,在深度值文本框里输入数值2.6,并按Enter键确认,单击右侧应用并保存按钮,生成如下所示立体图。
6、单击窗口右侧快捷工具栏中的草绘工具按钮,打开草绘对话框,单击使用先前的按钮,绘出如下所示图形7、单击继续当前部分按钮,再单击拉伸工具按钮,选择上步创建的草图,单击操控板中拉伸方式下拉箭头选择两侧对称按钮,在深度值文本框里输入数值4,并按Enter键确认,单击右侧应用并保存按钮,生成如下所示立体效果图。
8、单击窗口右侧快捷工具栏中的草绘工具按钮,打开草绘对话框,单击使用先前的按钮,绘出如下所示圆9、单击继续当前部分按钮,再单击拉伸工具按钮,选择上步创建的草图,单击操控板中去除材料按钮,然后单击拉伸方式下拉箭头选择两侧对称按钮,在深度值文本框里输入数值4,并按Enter键确认,单击右侧应用并保存按钮,生成如下所示立体效果10、倒圆角,应用并保存得到如下立体效果图。
11、利用草绘工具画出下图,然后进行拉伸,拉伸深度值为2.12、利用草绘工具画出下图,然后进行旋转,得到下图13、进入二维草图绘制界面,单击通过边创建图元按钮,然后单击曲面投影,将其作为参照基准,单击继续当前部分按钮,系统自动显示创建的曲线效果。
汽车发动机试验学发动机动态模拟试验课题PPT课件

2021/6/28
第11页/共15页
Page 11
发动机动态模拟试验
发动机耐久试验
采用真正行驶条件下的负载和转速而对内燃机进行动态 耐久性试验.能真实地考核内燃机各部件的磨损及寿命,尤 其对内燃机燃油消耗量的测量。
2021/6/28
第12页/共15页
Page 12
发动机动态模拟试验
汽车动力-传动系统优化匹配
1.车辆模拟
2.行驶模拟
2021/6/28
3e 13
结束
谢谢
第14页/共15页
Page 14
感谢您的观看。
同济大学汽车学院
第15页/共15页
Page 15/36
发动机动态模拟试验
试验台
软件模型传 统 的 发 动 机 台 架 稳 态 性 能 试 验 方 法 与 汽 车 发 动 机 实
差较大
际运行情况相
评价汽车发动机实际使用时的排放、油耗和瞬态动力性能的方法应是道路 行驶试验
在发动机台架上灵活地开展汽车动力系统性能的研究,打破汽车发动机研 究 中 一 贯 采 用 的 台i_e架ff ——转 鼓 ——道 路 的 三 阶 段 试 验 模 式 , 大 大 缩 短 了 研 制周期并节省了经费开支
第6页/共15页
Page 6
2. 驾驶循环试验
第7页/共15页
Page 7
发动机动态模拟试验
Engine
Combustion
Transmission
Manual Automatic
Driver
Roadload
2021/6/28
Mass
Drivetrain
第8页/共15页
Wheels
Page 8/36
基于BOPPPS模式的发动机动态演示与仿真实验教学设计

基于BOPPPS模式的发动机动态演示与仿真实验教学设计
刘亚飞;王树斌
【期刊名称】《集成电路应用》
【年(卷),期】2022(39)3
【摘要】阐述BOPPPS教学模式的六个阶段,包括课程导入、学习目标、前测、参与式学习、后测和总结,教学模式设计涡轮螺旋桨发动机的动态演示与仿真实验。
采用该模式教学易于教师操作,课程结构清晰,学生学习兴趣大为提高,教学效果良好。
【总页数】3页(P26-28)
【关键词】BOPPPS;教学模式;涡轮螺旋桨发动机;实验设计;仿真实验
【作者】刘亚飞;王树斌
【作者单位】滨州学院飞行学院
【正文语种】中文
【中图分类】TP274;TP212
【相关文献】
1.基于虚拟技术的发动机滑油系统动态演示设计
2.基于Pro/E和Adams的电调红外镜头产品结构件三维设计、动态演示及运动学仿真分析
3.基于虚拟仿真技术的
绿色建筑设计实验教学平台研究——以安徽建筑大学建筑设计虚拟仿真实验教学
项目为例4.基于BOPPPS教学模式的机械专业综合实验教学设计5.基于算法组件
动态组合的固体火箭发动机计算机辅助设计/计算机仿真(SRMCAD/CS)
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发动机实体建模及运动仿真学生:陈柯佛指导老师:邓先智目录摘要 (4)前言 (5)1.发动机的简介 (6)1.1发动机的发展历史及前景 (6)1.2发动机的种类 (7)2.运动仿真技术简介 (9)2.1运动仿真技术产生的背景 (9)2.2运动仿真技术 (9)2.3运动仿真技术在国内外的发展概况 (10)2.4 发展运动仿真技术的重要意义 (11)3.Pro/E软件简介 (11)3.1 Pro/E软件的基本功能及作用 (12)4.发动机主要零件三维实体建模 (14)4.1零件建模 (14)4.1.1曲轴的生成 (15)4.1.2曲轴箱体的生成 (16)4.1.3下曲轴箱盖 (17)4.1.4 连杆 (18)4.1.5 活塞 (19)4.1.6 飞轮 (19)5.零件装配 (20)5.1 新建装配模型 (22)5.2 组装机构模型 (22)6.发动机运动仿真 (38)6.1概述 (38)6.2定义仿真与分析 (38)6.2.1 定义伺服电动机 (39)6.2.3 定义机构分析 (44)6.2.4 测量活塞的速度 (46)7.结论 (49)摘要发动机是一种应用广泛的传递动力的机器,把能量转化为机械能额装置。
目前的传统的发动机都是将燃料的化学能变为热能,再由热能转变为机械动力,并通过底盘的传动系和行驶系驱动汽车行驶。
有其广泛的空间,但由于发动机传统开发模式存在的开发周期长、过程繁杂、开发成本高、性能测试困难等问题,本文将仿真技术引入发动机开发领域,完成以下工作:1.介绍了发动机的发展历史及前景,发动机的种类,介绍了仿真技术的产生的背景、在国内的发展状况及仿真技术的实际意义。
2.简述了pro/E软件在工程设计中的应用,利用pro/E构建发动机的三维实体模型,并对其进行装配。
3.在pro/E进行运动仿真。
关键词:发动机仿真技术三维建模前言随着机械行业的迅速发展和市场竞争的日益激烈,如何提高产品品质,增强产品的市场竞争能力,缩短产品开发周期,降低成本已成为企业十分重视的问题。
现代化的开发手段是提高企业竞争力的重要保证。
企业应用pro/E后,可改变传统的设计方法,显著缩短了新产品的设计周期,为新产品占领市场创造了有利的条件。
现结合pro/E 软件的实际,阐述该软件对提高产品设计能力的重要作用和应用效果。
在产品零部件的设计过程中,运动机构的空间干涉问题历来都是令机械设计工程师深感头疼的事。
按传统设计模式,设计人员在一些细节问题上耗费了很大的精力,降低设计效率。
而有些错误又往往具有很强的隐蔽性,给生产造成不应有的损失。
因此,利用计算机三维设计工具合理的解决这些问题无疑具有一定的实际意义。
当今流行比较广的三维设计软件主要有AutoCAD,Pro/ENGINEER等。
无论是零件的整体设计,还是工程图三视图的生成,以及3D装配图的形成方式和仿真模拟加工记录参数完善改进,pro/E软件都有操作容易、使用方便、修改方便的特点,因此在机械三维实体造型设计中得到了广泛的应用。
1.发动机的简介发动机(Engine),又称为引擎,是一种能够把一种形式的能转化为另一种更有用的能的机器,通常是把化学能转化为机械能。
(把电能转化为机器的称为电动机)有时它既适用于动力发生装置,也可指包括动力装置的整个机器,比如汽油发动机,航空发动机。
发动机最早诞生在英国,所以,发动机的概念也源于英语,它的本义是指那种“产生动力的机械装置”。
1.1发动机的发展历史及前景发动机是汽车的“心脏”。
汽车的发展与发动机的进步有着直接的联系。
18世纪中叶,瓦特发明了蒸汽机,此后人们开始设想把蒸汽机装到车子上载人。
法国的居纽是第一个将蒸汽机装到车子上的人。
1770年,居纽制作了一辆三轮蒸汽机车。
这辆车全长7.23米,时速为3.5公里,是世界上第一辆蒸汽机车。
1858年,定居在法国巴黎的里诺发明了煤气发动机,并于1860年申请了专利。
发动机用煤气和空气的混合气体取代往复式蒸汽机的蒸汽,使用电池和感应线圈产生电火花,用电火花将混合气点燃爆发。
这种发动机有气缸、活塞、连杆、飞轮等。
煤气机是内燃机的初级产品,因为煤气发动机的压缩比为零。
1867年,德国人奥托(August Otto)受里诺研制煤气发动机的启发,对煤气发动机进行了大量的研究,制作了一台卧式气压煤气发动机,后经过改进,于1878年在法国举办的国际展览会上展出了他制作的样品。
由于该发动机工作效率高,引起了参观者极大的兴趣。
在长期的研究过程中,奥托提出了内燃机的四冲程理论,为内燃机的发明奠定了理论基础。
德国人奥姆勒和卡尔·本茨根据奥托发动机的原理,各自研制出具有现代意义的汽油发动机,为汽车的发展铺平了道路。
1892年,德国工程师狄塞尔根据定压热功循环原理,研制出压燃式柴油机,并取得了制造这种发动机的专利权。
1957年,德国人汪克尔发明了转子活塞发动机,这是汽油发动机发展的一个重要分支。
转子发动机的特点是利用内转子圆外旋轮线和外转子圆内旋轮线相结合的机构,无曲轴连杆和配气机构,可将三角活塞运动直接转换为旋转运动。
它的零件数比往复活塞式汽油少40%,质量轻、体积小、转速高、功率大。
1958年汪克尔将外转子改为固定转子为行星运动,制成功率为22.79千瓦、转速为5500转/分的新型旋转活塞发动机。
1.2发动机的种类发动机的种类很多,工作原理和用途也不一样。
大多数发动机都是以输出有效轴功率为目的的,即驱动一根或几根轴转动。
这样的发动机主要包括:1.活塞式。
2.涡轮式。
3.活塞+涡轮式活塞式发动机包括:内燃机、热气机(斯特林发动机)、旋转活塞发动机(包括三角转子发动机)、蒸汽机等。
还有一些特殊的比如用在鱼雷中的活塞式发动机。
涡轮式包括:燃气轮机、蒸汽轮机,风力发动机、水轮机也可以看作是涡轮式发动机。
还有一些用在特殊地方的涡轮式发动机,比如用在鱼雷中的涡轮发动机,其本质与蒸汽轮机类似,但工作工质是燃气和蒸汽的混合物。
活塞+涡轮式的,有一种“自由活塞发动机”,是使用气缸得到高温高压燃气,在涡轮中做功输出有效功率的发动机。
另外涡轮增压内燃机、涡轮复合内燃机也可以看作是活塞+涡轮式的。
实际上上述各种工作原理不同的发动机,还可以根据其它方面不同,细分成很多种类型。
比如,内燃机可以分成汽油机、柴油机、煤气机(以煤气为燃料的内燃机。
使用天然气的叫做燃气内燃机,也包含在这里吧)、多种燃料发动机等等。
燃气轮机可以分成单转子、双转子、三转子的,也可以根据热力循环的不同分成回热式、压气中间冷却式、再热式,以及多种循环组成的复合循环燃气轮机。
热气机可以分成单作用式、双作用式,以及菱形传动、斜盘传动、自由活塞式等等。
总之按照每一种原理工作发动机都可以有很多的不同分支。
飞机发动机和火箭发动机,利用喷出高速气流的反作用力获得推力。
喷气发动机包括依赖空气的和不依赖空气的。
依赖空气的一般俗称航空发动机,包括涡轮喷气式发动机、涡轮风扇式发动机(可以分成混合排气小涵道比涡轮风扇发动机,和大涵道比分开排气涡轮风扇发动机)、涡轮轴发动机、涡轮螺旋桨发动机、冲压式发动机等。
不依赖空气的一般俗称火箭发动机,以使用的燃料是固态的还是液态的,分成液体火箭发动机和固体火箭发动机、使用核能的核火箭发动机、使用电场加速离子的电火箭发动机等等。
2.运动仿真技术简介2.1运动仿真技术产生的背景进入21世纪,科学技术突飞猛进,社会发展日新月异。
人们对个性化产品的需求越来越迫切,对产品性能的要求越来越高,全球化经济已明显的呈现出买方市场的特点。
由于这一变化,导致市场竞争日益激烈,而竞争的核心则主要体现在产品创新上,体现在对客户的影响速度和相应品质上。
传统的物理样机在产品的创新开发中,在开发中期、开发成本、产品品质等方面已越来越不能满足市场需求,运动仿真技术正是在这一市场需求的驱动下产生的。
2.2运动仿真技术运动仿真技术是一种崭新的产品开发方法,是多个相关学科领域交叉、集成的产物,是一种基于产品的计算机仿真模型的数字化设计方法。
其涉及机械、电子、计算机图形学、仿真建模、虚拟现实等多个领域、多项技术,以计算机仿真和产品生命周期建模为基础,以机械系统运动学、动力学和控制理论为核心,借助成熟的三维计算机图形技术、图形用户界面技术、信息技术、集成技术、多媒体技术、并行处理技术等,将分散的产品设计开发和分析过程集成在一起,使得与产品相关的所有人员能在产品研制的早期直观形象地对虚拟的产品原型进行设计优化、性能测试、制造仿真以及使用仿真等。
换句话说“运动仿真”设计方法就是在建造第一台(件)物理样机之前,利用软件技术建立产品系统计算机模型,通过基于实体可视化的仿真分析,模拟系统在真实工作环境条件下的运动和动力特性,以便反复修改设计方案,最终得到最优设计方案。
2.3运动仿真技术在国内外的发展概况国外已在各个领域广泛地应用仿真设计。
所涉及到的产品从庞大的卡车到微小的照相机的快门,从火箭到轮船的锚机。
在工程/矿山机械行业,如约翰•迪尔公司利用仿真技术成功地解决了工程机械在高速行驶时出现蛇行现象的问题及在重载下的自激振动这个一直困扰着设计师及用户的难题,大大提高了工程/矿山机械高速行驶性能与重载作业性能。
卡特彼勒公司利用虚拟样机在切削任何一片金属之前就可快速试验数千种设计方案,不但降低了产品设计成本,缩短了开发周期,而且还制造出性能更为优异的产品。
运动仿真技术在国外已有很多应用实例,我国也正极急投身于该项技术的研究中。
在传统上,我国引进物理样机,开发人员往往停留在零件照抄的水平上,对于样机缺乏系统水平上的理解和研究,结果虽然投入了大量的人力物力,却收效甚微。
但如果采用虚拟样机技术,技术人员便可对引进样机进行深入的研究,可以追踪样机的设计思想,从而真正提高设计人员的水平,开发出能满足市场需求的产品来。
2.4 发展运动仿真技术的重要意义运功能及制造等方面交互的建模和分析。
在概念设计和方案论证中,便于设计师将自己的经验与想象融于计算机的虚拟样机设计中,充分发挥想象力和创造力,并代替虚拟样机进行性能模拟实验。
设计师可在计算机上方便的确定、修改设计进程,逐步优化设计方案。
通过运动仿真机实验,还可节省建立试验台、动仿真设计方法将分散的零部件设计和分析技术集成在一起,提供一种更全面地了解设备性能的方法。
他利用虚拟环境在可视化方面的优势以及可交互式地探索虚拟物体的功能,对设备进行几何、安装测试设备和测试仪表等有关的费用,更快的确定影响设计方案性能的敏感参数,达到最优化设计目的。
这样,可大大缩短设备研发周期,降低研发成本,提高设计质量和效率,为产品赢得竞争优势。
3.Pro/E软件简介Pro/E是美国PTC(参数)公司开发的一款三维软件。
Pro/E以其基于特征的参数化造型、单一数据库下的全相关性等新概念而闻名于世,具有很强的实体造型和虚拟装配能力。