C语言串口通信助手代码
串口精灵源代码

for(int i=0;i<len;)
{
char lstr,hstr=str[i];
if(hstr==' ')
{
i++;
continue;
}
i++;
if(i>=len)
break;
lstr=str[i];
//功能:若是在0-F之间的字符,则转换为相应的十六进制字符,否则返回-1
char CSCommTestDlg::ConvertHexChar(char ch)
{
if((ch>='0')&&(ch<='9'))
return ch-0x30;
else if((ch>='A')&&(ch<='F'))
{
// TODO: Add your control notification handler code here
VARIANT variant_inp;
COleSafeArray safearray_inp;
LONG len,k;
BYTE rxdata[2048]; //设置BYTE数组 An 8-bit integerthat is not signed.
写出详细的编程过程,姑且叫串口调试助手源程序V1.0或VC串口通讯源程序吧,
我相信,如果你用VC编程,那么有了这个代码,就可以轻而易举地完成串口编
程任务了。(也许本文过于详细,高手就不用看)
开始吧:
C语言串口通信-源代码

C语言串口通信-源代码#include<tdio.h>#include<do.h>#include<conio.h>#include<tring.h>#defineCOM2320某2f8#defineCOMINT0某0b#defineMa某BufLen500#definePort82590某20#defineEofInt0某20taticcharintvectnum;taticunignedcharmakb;taticunignedcharBuffer[Ma某BufLen];taticintCharInBuf,CircIn,CircOut;taticvoid(interruptfar某OldAyncInt)();taticvoidinterruptfarAyncInt(void);unignedcharData,unignedcharStop,unignedcharParity){ unignedcharHigh,Low;intf;intvectnum=IntVectNum;CharInBuf=0;CircIn=0;CircOut=0;diable();OldAyncInt=getvect(IntVectNum);etvect(IntVectNum,Ay ncInt);enable();makb=inp(Port8259+1);if(IntVectNum==0某0c)outp(Port8259+1,makb&0某ef);eleoutp(Port8259+1,makb&0某f7);}taticvoidinterruptfarAyncInt(void){diable();if(CharInBuf<Ma某BufLen)if(CircIn<Ma某BufLen-1)CircIn++;eleCircIn=0;if(CircIn==CircOut)CircOut++;eleCharInBuf++;enable();outp(Port8259,EofInt);}voidRetore(void)etvect(intvectnum,OldAyncInt);outp(Port8259+1,makb);}intGetCharInBuf(unignedchar某Char) {intFlag;Flag=-1;if(CharInBuf>0){(某Char)=Buffer[CircOut];if(CircOut<Ma某BufLen-1)CircOut++; eleCircOut=0;CharInBuf--;Flag=0;}returnFlag;}intSendChar(unignedcharChar)return0;}main(){inti,c;unignedcharInChar;Init_COM(COM232,COMINT,1200,8,1,0); while(1){if(kbhit()){if((InChar=getch())==27)break; elewhile(SendChar(InChar));}if(GetCharInBuf(&InChar)==0)printf("%c",InChar);}Retore();}接收程序:#include<do.h>#include<ftream.h>#include<conio.h>#include<tdio.h>#include<tdlib.h>#include<math.h>#defineR某D0//接收voidInt(){unignedcharkey,key2;if(peek(0某40,port某2)==0){e某it(1);}ele{};Getportaddr(port);//得到串口地址SerInit(SER_BAUD_9600,SER_PARITY_EVEN|SER_BITS_8|SER_STOP_1) ;//初始化串口,设置波特率等SerOpen();do{if(kbhit()){key2=getch();if(key2==27){break;}};key=getb();if(key!=0某ff){printf("%某\t",key);FILE某fp;fp=fopen("C:\\Receivedata.dat","ab");//可选择接收数据的存放文件路径和文件名if(fp==NULL)printf("Fileopenerror!");//fputc(key,fp);fwrite(&key,izeof(unignedchar),1,fp);fcloe(fp);}}while(key2!=27);SerCloe();//printf("%dcharhabeenreceived\n",incount); //printf("%dcharhabeenended\n",outcount);//printf("\num=%d\n",um);}{printf("PleaeinputthereceiveCOMnum:(1~4)\n"); Cloe_Serial(intport_bae){outp(port_bae+SER_MCR,0);outp(port_bae+SER_IER,0);outp(PIC_IMR,old_int_mak);if(port_bae==COM_1){_do_etvect(INT_SER_PORT_0,Old_Ir);}ele{_do_etvect(INT_SER_PORT_1,Old_Ir);}}/某-------------发送应用----------------某/ voidmain(intargc,char某argv[]){charch,pre;intdone=0;FILE某fp;argc=2;if(argc<2){printf("\nUage:diplayfilename.wav!!!");//e某it(1);}if((fp=fopen(argv[1],"r+b"))==NULL){printf("cannotopenthefile\n");//e某it(0);}feek(fp,0,SEEK_SET);Open_Serial(COM_1,SER_BAUD_9600,SER_PARITY_EVEN|SER_STOP_1);printf("preanykeytobeginending");getch();//Serial_Write('');//该语句可用于发送单个字符while(!done&&ch!=EOF)//发送文件开始{ch=fgetc(fp);SER_BITS_8|//if(ch==EOF)Serial_Write(27);Serial_Write(ch);delay(30);if( kbhit()){pre=getch();if(pre==27){Serial_Write(27);done=1;}}}Cloe _Serial(COM_1);fcloe(fp);}下面介绍最重要的MFC:CWnd:窗口,它是大多数“看得见的东西”的父类(Window里几乎所有看得见的东西都是一个窗口,大窗口里有许多小窗口),比如视图CView、框架窗口CFrameWnd、工具条CToolBar、对话框CDialog、按钮CButton,etc;一个例外是菜单(CMenu)不是从窗口派生的。
C#串口调试助手

//serialPort1.Parity = (Parity)Enum.Parse(typeof(Parityset), comboBox4.SelectedItem.ToString());
} public enum Parityset {
None, odd, Even, Mark, Space } private void comboBox5_SelectedIndexChanged(object sender, EventArgs e) //停止位 { serialPort1.StopBits = (StopBits)Enum.Parse(typeof(StopBits), boBox5.Text); }
serialPort1.BaudRate = int.Parse(comboBox2.Text); serialPort1.DataBits = int.Parse(comboBox3.Text); serialPort1.Parity = (Parity)Enum.Parse(typeof(Parityset),
namespace WindowsFormsApplication1 {
public partial class Form1 : Form {
public Form1() {
InitializeComponent(); }
private void Form1_Load(object sender, EventArgs e) {
textBox3.Text = serialPort.ReadExisting();
label10.Text = (int.Parse(label10.Text.Trim()) + 1).ToString(); //统计接收区 数据 组数
C语言实现串口通信
C语言实现串口通信在使用系统调用函数进行串口通信之前,需要打开串口设备并设置相关参数。
打开串口设备可以使用open(函数,设置串口参数可以使用termios结构体和tcsetattr(函数。
以下是一个简单的串口通信接收数据的示例代码:```c#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>int mainint fd; // 串口设备文件描述符char buff[255]; // 存储接收到的数据int len; // 接收到的数据长度//打开串口设备fd = open("/dev/ttyS0", O_RDONLY);if (fd < 0)perror("Failed to open serial port");return -1;}//设置串口参数struct termios options;tcgetattr(fd, &options);cfsetspeed(&options, B1200); // 设置波特率为1200 tcsetattr(fd, TCSANOW, &options);//接收数据while (1)len = read(fd, buff, sizeof(buff)); // 从串口读取数据if (len > 0)buff[len] = '\0'; // 将接收到的数据转为字符串printf("Received data: %s\n", buff);}}//关闭串口设备close(fd);return 0;```这段代码首先通过open(函数打开串口设备文件"/dev/ttyS0",然后使用tcgetattr(函数获取当前设置的串口参数,接着使用cfsetspeed(函数设置波特率为1200,最后使用tcsetattr(函数将设置好的串口参数写回。
三菱PLC编程口通信C语言源代码三菱plc

三菱PLC编程口通信C语言源代码 - 三菱plcfxnew.h#define DELAY_TIMES 30000L#define TRUE 1#define FALSE 0#define TRUE 1#define FALSE 0#define FORCE_ON 0x37#define FORCE_OFF 0x38void init_plc(void);int check_plc(void);int _read_data_register(unsigned int uAddress,unsigned int number);int _read_mdata_register(unsigned int uAddress,unsigned int number);int _write_data_register(unsigned int uAddress,unsigned int number);int _force_m_contact(unsigned int uAddress,unsigned char ucOn_off);int read_data_register(unsigned int uAddress,unsigned intnumber);int read_mdata_register(unsigned int uAddress,unsigned int number);int write_data_register(unsigned int uAddress,unsigned int number);int force_m_contact(unsigned int uAddress,unsigned char ucOn_off);int _read_m_register(unsigned int uAddress,unsigned int number);int read_m_register(unsigned int uAddress,unsigned int number);int TESTING=0;unsigned int uRead_value[25];unsigned int uWrite_value[25];unsigned int COMM_PORT=1;unsigned int STATS_PORT=0x2fd;unsigned int DATA_PORT=0x2f8;void init_plc(void){ _AX=0xfa;_DX=COMM_PORT;geninterrupt(0x14);while((inportb(STATS_PORT)1)!=0)inportb(DATA_PORT);}int check_plc(void){ long lTmp;if(TESTING==1)return TRUE;init_plc();for(lTmp=0L;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)0x20)!=0) break;}if(lTmp=DELAY_TIMES)return(FALSE);outportb(DATA_PORT,5);disable();for(lTmp=0L;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}if((lTmp=inportb(DATA_PORT))==6){ enable();return(TRUE);}else{ enable();return(FALSE);}}int read_data_register(unsigned int uAddress,unsigned int number){int i;for(i=0;i3;i++)if(_read_data_register(uAddress,number)==TRUE)return TRUE;return FALSE;}int _read_data_register(unsigned int uAddress,unsigned int number){ unsigned char uSend[]={2,0x30,0x30,0x30,0x30,0x30,0x30,0x32,3,0x30,0x30}; unsigned char uReceive[104];unsigned int uTmp;unsigned int uSum;unsigned int num;long lTmp;int i,j;if(TESTING==1){ for(i=0;inumber;i++)uRead_value[i]=0;return TRUE;}init_plc();num=number*2;if((num/16)=10)uSend[6]=(unsigned char)(num/16+0x41-10);elseuSend[6]=(unsigned char)(num/16+0x30);if((num%16)=10)uSend[7]=(unsigned char)((num%16)+0x41-10); elseuSend[7]=(unsigned char)((num%16)+0x30);uAddress=uAddress*2+0x1000;uTmp=uAddress 0x000f;uSend[5]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);uTmp=(uAddress4) 0x000f;uSend[4]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress8) 0x000f;uSend[3]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress12)0x000f;uSend[2]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uSum=0;for(i=1;i9;i++)uSum=uSum+(unsigned char)uSend[i];uTmp=uSum0x000f;uSend[10]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uSum4)0x000f;uSend[9]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);for(i=0;i11;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)0x20)!=0)break;}if(lTmp=DELAY_TIMES){return(FALSE);}outportb(DATA_PORT,uSend[i]); }disable();for(lTmp=0;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}uReceive[0]=inportb(DATA_PORT);if(uReceive[0]!=2){enable();return(FALSE);}for(i=1;inumber*4+4;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)1)!=0)break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}uReceive[i]=inportb(DATA_PORT);}enable();uSum=0;for(i=1;inumber*4+2;i++)uSum=uSum+(unsigned int)uReceive[i];uTmp=uSum0xf;uTmp=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);if((unsigned char)uTmp!=uReceive[number*4+3])return(FALSE); uTmp=(uSum4)0xf;uTmp=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);if((unsigned char)uTmp!=uReceive[number*4+2])return(FALSE); for(j=0;jnumber;j++){for(i=j*4+1;ij*4+5;i++)uReceive[i]=(uReceive[i]0x39)?uReceive[i]-0x41+0xa:uReceive [i]-0x30;uRead_value[j]=(((((uReceive[j*4+3]4)+uReceive[j*4+4])4)+uR eceive[j*4+1])4)+uReceive[j*4+2];}return TRUE;}int read_mdata_register(unsigned int uAddress,unsigned int number){int i;for(i=0;i3;i++)if(_read_mdata_register(uAddress,number)==TRUE)return TRUE;return FALSE;}int _read_mdata_register(unsigned int uAddress,unsigned int number){ unsigned char uSend[]={2,0x30,0x30,0x30,0x30,0x30,0x30,0x32,3,0x30,0x30};unsigned char uReceive[104];unsigned int uTmp;unsigned int uSum;unsigned int num;long lTmp;int i,j;if(TESTING==1){ for(i=0;inumber;i++)uRead_value[i]=0; return TRUE;}init_plc();num=number*2;if((num/16)=10)uSend[6]=(unsigned char)(num/16+0x41-10); elseuSend[6]=(unsigned char)(num/16+0x30);if((num%16)=10)uSend[7]=(unsigned char)((num%16)+0x41-10); elseuSend[7]=(unsigned char)((num%16)+0x30);/*uAddress=uAddress*2+0x1000;*/uTmp=uAddress 0x000f;uSend[5]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress4) 0x000f;uSend[4]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress8) 0x000f;uSend[3]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress12)0x000f;uSend[2]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uSum=0;for(i=1;i9;i++)uSum=uSum+(unsigned char)uSend[i];uTmp=uSum0x000f;uSend[10]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uSum4)0x000f;uSend[9]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); for(i=0;i11;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)0x20)!=0)break;}if(lTmp=DELAY_TIMES){return(FALSE);}outportb(DATA_PORT,uSend[i]); }disable();for(lTmp=0;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}uReceive[0]=inportb(DATA_PORT);if(uReceive[0]!=2){enable();return(FALSE);}for(i=1;inumber*4+4;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)1)!=0)break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}uReceive[i]=inportb(DATA_PORT);}enable();uSum=0;for(i=1;inumber*4+2;i++)uSum=uSum+(unsigned int)uReceive[i];uTmp=uSum0xf;uTmp=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);if((unsigned char)uTmp!=uReceive[number*4+3])return(FALSE); uTmp=(uSum4)0xf;uTmp=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);if((unsigned char)uTmp!=uReceive[number*4+2])return(FALSE); for(j=0;jnumber;j++){for(i=j*4+1;ij*4+5;i++)uReceive[i]=(uReceive[i]0x39)?uReceive[i]-0x41+0xa:uReceive [i]-0x30;uRead_value[j]=(((((uReceive[j*4+3]4)+uReceive[j*4+4])4)+uR eceive[j*4+1])4)+uReceive[j*4+2];}return TRUE;}int write_data_register(unsigned int uAddress,unsigned int number){int i;for(i=0;i3;i++)if(_write_data_register(uAddress,number)==TRUE)return TRUE;return FALSE;}int _write_data_register(unsigned int uAddress,unsigned int number){ unsigned char uSend[111];unsigned int uTmp,uSum,num;long lTmp;int i;if(TESTING==1)return TRUE;init_plc();uSend[0]=2;uSend[1]=0x31;uSend[number*4+8]=3;num=(number*2)/16;if(num=10)uSend[6]=num+0x41-10;else uSend[6]=num+0x30;num=(number*2)%16;if(num=10)uSend[7]=num+0x41-10;else uSend[7]=num+0x30;uAddress=0x1000+2*uAddress;uTmp=uAddress0x000f;uSend[5]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress4)0x000f;uSend[4]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress8)0x000f;uSend[3]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress12)0x000f;uSend[2]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);for(i=0;inumber;i++){uTmp=uWrite_value[i]0x000f;uSend[i*4+9]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);uTmp=(uWrite_value[i]4)0x000f;uSend[i*4+8]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);uTmp=(uWrite_value[i]8)0x000f;uSend[i*4+11]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uWrite_value[i]12)0x000f;uSend[i*4+10]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);}uSum=0;for(i=1;i9+number*4;i++)uSum+=uSend[i];uTmp=uSum0x000f;uSend[number*4+10]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uSum4)0x000f;uSend[number*4+9]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); for(i=0;i11+number*4;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)0x20)!=0)break;}if(lTmp=DELAY_TIMES){/*enable();*/return(FALSE);}outportb(DATA_PORT,uSend[i]);}disable();for(lTmp=0L;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}if(inportb(DATA_PORT)!=6){enable();return(FALSE);}else{enable();return(TRUE);}}int force_m_contact(unsigned uAddress,unsigned char ucOn_off) {int i;for(i=0;i3;i++)if(_force_m_contact(uAddress,ucOn_off)==TRUE)return TRUE;return FALSE;}int _force_m_contact(unsigned uAddress,unsigned char ucOn_off) { unsigned uSend[]={2,0x37,0x30,0x30,0x30,0x30,3,0x30,0x30}; unsigned uTmp,uSum,i;long lTmp;if(TESTING==1)return TRUE;init_plc();uAddress=uAddress+0x800;uSend[1]=ucOn_off;uTmp=uAddress0x000f;uSend[3]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress4)0x000f;uSend[2]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress8)0x000f;uSend[5]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress12)0x000f;uSend[4]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uSum=0;for(i=1;i7;i++)uSum+=uSend[i];uTmp=uSum0x000f;uSend[8]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uSum4)0x000f;uSend[7]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); for(i=0;i9;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)0x20)!=0)break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}outportb(DATA_PORT,uSend[i]);}disable();for(lTmp=0L;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}if(inportb(DATA_PORT)!=6){enable();return(FALSE);}else{ enable();return(TRUE);}}int read_m_register(unsigned int uAddress,unsigned int number) {int i;for(i=0;i3;i++)if(_read_m_register(uAddress,number)==TRUE)return TRUE;return FALSE;}int _read_m_register(unsigned int uAddress,unsigned int number){ unsigned char uSend[]={2,0x30,0x30,0x30,0x30,0x30,0x30,0x32,3,0x30,0x30}; unsigned char uReceive[54];unsigned int uTmp;unsigned int uSum;unsigned int num;long lTmp;int i,j;if(TESTING==1){ for(i=0;inumber;i++)uRead_value[i]=0;return TRUE;}init_plc();num=number;if((num/16)=10)uSend[6]=(unsigned char)(num/16+0x41-10);elseuSend[6]=(unsigned char)(num/16+0x30);if((num%16)=10)uSend[7]=(unsigned char)((num%16)+0x41-10); elseuSend[7]=(unsigned char)((num%16)+0x30);uAddress=uAddress/8+0x100;uTmp=uAddress 0x000f;uSend[5]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress4) 0x000f;uSend[4]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress8) 0x000f;uSend[3]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uAddress12)0x000f;uSend[2]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);uSum=0;for(i=1;i9;i++)uSum=uSum+(unsigned char)uSend[i];uTmp=uSum0x000f;uSend[10]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa); uTmp=(uSum4)0x000f;uSend[9]=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);for(i=0;i11;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++){ if((inportb(STATS_PORT)0x20)!=0)break;}if(lTmp=DELAY_TIMES){/*enable();*/return(FALSE);}outportb(DATA_PORT,uSend[i]);}disable();for(lTmp=0;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}uReceive[0]=inportb(DATA_PORT);if(uReceive[0]!=2){enable();return(FALSE);}for(i=1;inumber*2+4;i++){ for(lTmp=0L;lTmpDELAY_TIMES;lTmp++) { if((inportb(STATS_PORT)1)!=0) break;}if(lTmp=DELAY_TIMES){enable();return(FALSE);}uReceive[i]=inportb(DATA_PORT);}enable();uSum=0;for(i=1;inumber*2+2;i++)uSum=uSum+(unsigned int)uReceive[i];uTmp=uSum0xf;uTmp=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);if((unsigned char)uTmp!=uReceive[number*2+3])return(FALSE); uTmp=(uSum4)0xf;uTmp=(uTmp10)?(uTmp+0x30):(uTmp+0x41-0xa);if((unsigned char)uTmp!=uReceive[number*2+2])return(FALSE); for(j=0;jnumber;j++){for(i=j*2+1;ij*2+3;i++)uReceive[i]=(uReceive[i]0x39)?uReceive[i]-0x41+0xa:uReceive [i]-0x30;uRead_value[j]=((uReceive[j*2+1])4)+uReceive[j*2+2];}return TRUE; }。
51单片机的串口通信程序(C语言)
#include <reg52.h>#include<intrins.h>#include <stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned intsbit Key1 = P2^3;sbit Key2 = P2^2;sbit Key3 = P2^1;sbit Key4 = P2^0;sbit BELL = P3^6;sbit CONNECT = P3^7;unsigned int Key1_flag = 0;unsigned int Key2_flag = 0;unsigned int Key3_flag = 0;unsigned int Key4_flag = 0;unsigned char b;unsigned char code Num[21]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00, 0x10,0x89};unsigned char code Disdigit[4] = {0x7F,0xBF,0xDF,0xEF};unsigned char Disbuf[4];void delayms(uint t){uint i;while(t--){/* 对于11.0592M时钟,约延时1ms */for (i=0;i<125;i++){}}}//-----------------------------------------------------void SendData(uchar Dat){uchar i=0;SBUF = Dat;while (1){if(TI){TI=0;break;}}}void ScanKey(){if(Key1 == 0){delayms(100); if(Key1 == 0){Key1_flag = 1; Key2_flag = 0; Key3_flag = 0;Key4_flag = 0;Key1 = 1;}else;}if(Key2 == 0){delayms(100);if(Key2 == 0){Key2_flag = 1; Key1_flag = 0; Key3_flag = 0;Key4_flag = 0;Key2 = 1;}else;}if(Key3 == 0){delayms(50);if(Key3 == 0){Key3_flag = 1; Key1_flag = 0; Key2_flag = 0;Key4_flag = 0;Key3 = 1;}else;}if(Key4 == 0){delayms(50);if(Key4 == 0){Key4_flag = 1;Key1_flag = 0;Key2_flag = 0;Key3_flag = 0;Key4 = 1;}else;}else;}void KeyProc(){if(Key1_flag){TR1 = 1;SendData(0x55);Key1_flag = 0; }else if(Key2_flag){TR1 = 1;SendData(0x11); Key2_flag = 0;}else if(Key3_flag) {P1=0xff;BELL = 0;CONNECT = 1;Key3_flag = 0;}else if(Key4_flag){CONNECT = 0;BELL = 1;Key4_flag = 0;}else;}void Initdisplay(void){Disbuf[0] = 1;Disbuf[1] = 2;Disbuf[2] = 3;Disbuf[3] = 4;}void Display() //显示{unsigned int i = 0;unsigned int temp,count;temp = Disdigit[count]; P2 =temp;temp = Disbuf[count];temp = Num[temp];P0 =temp;count++;if (count==4)count=0;}void time0() interrupt 1 using 2 {Display();TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;}void main(){Initdisplay();TMOD = 0x21;TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;TR0 = 1;ET0 = 1;TH1 = 0xFD; //11.0592MTL1 = 0xFD;PCON&=0x80;TR1 = 1;ET1 = 1;SCON = 0x40; //串口方式REN = 1;PT1 = 0;PT0 = 1;EA = 1;while(1){ScanKey();KeyProc();if(RI){Disbuf[0] = 0;Disbuf[1] = 20;Disbuf[2] = SBUF>>4;Disbuf[3] = SBUF&0x0f;RI = 0;}else;}}51单片机串口通信C语言程序2**************************************************************; 平凡单片机工作室;ckss.asm;功能:反复向主机送AA和55两个数;主机使用一个串口调试软件设置19200,n,8,1***************************************************************/#include "reg51.h"#define uchar unsigned char#define uint unsigned int//延时程序//////////////////由Delay参数确定延迟时间*/void mDelay(unsigned int Delay){ unsigned int i;for(;Delay>0;Delay--){ for(i=0;i<124;i++){;}}}//////////////////// 主程序////////////////////void main(){ uchar OutDat; //定义输出变量TMOD=0x20; //TMOD=0TH1=0xf3; //12MHZ ,BPS:4800,N,8,1TL1=0xf3;PCON=0x80; //方式一TR1=1; //?????????????????????????????SCON=0x40; //串口通信控制寄存器模式一OutDat=0xaa; //向串口发送固定数据值for(;;) //循环程序{SBUF=OutDat;//发送数据for(;;){ if(TI) //发送中断位当发送停止位时置1,表示发送完成break;}mDelay(500);TI=0; //清零中断位OutDat=~OutDat; //显示内容按位取反}}。
VC(MFC)编写串口调试助手
VC(MFC)编写串口调试助手1.序确定基本功能:1.自动寻找串口,并自动添加到下拉框中共选择;2.有波特率、数据位、停止位、校验位的选择设置;3.串口打开控制按钮;4.发送、清除按钮;5.接收是自动实现的;6.有定时自动发送功能;7.有传送文件功能;8.有状态栏显示,指示串口状态,设置参数和发送接收显示。
下面就一步步实现,本人纯业余,只是记录下来这个学习过程,请勿拍砖。
开发平台Visual C++6.0英文版,电脑是i7-2670Q四核8G内存1G独显的笔记本,装的win7 64位旗舰版,因此VC6兼容不是太好,有些小毛病,不过不影响编写。
2.创建MFC项目File -> New -> Projects选择MFC AppWizard(exe),项目名称commassist选择OK选中Dialog based,点击Next> 。
默认选项,点击Next> ,继续默认选项,点击Next> ,如果选中As a statically linked library,生产的EXE可直接在没装VC的机器上运行。
可以在项目中进行更改。
选择第二个CCommassistDlg,点击Finish点击OK。
项目创建完毕,进入项目。
删除界面上确定和取消按钮以及静态文字。
3.创建界面保存后便可以开始创建界面了。
参考界面仿照设计的界面,具体添加按钮或编辑框等的布局步骤就不用细说了。
4.图标修改在资源视图中选择Icon右键InsertIcon加入打开和关闭的Icon图标或自行绘制,如下图IDR_MAINFRAME原为MFC提供的图标,这里我直接改成自己的,生成EXE后将会显示这个图标。
下面将帮助页面图标也改为自绘图标。
在打开按钮旁边加入自绘的打开和关闭图标:先加入工具条中的Picture,然后选中右键看属性,并如图将Image选为默认的IDI_ICON_CLOSE。
如下图5.基本设置下面对各个按钮及编辑框设置进行描述右键串口对应的Combo Box,ID设置为IDC_COMLIST,Type设置为Drop List,Sort不选择(我系统是WIN7 64位,不选中反而自动排序,至于XP得试试看了,以下的选择相同)。
C语言串口通信-源代码
#include <stdio.h>#include <dos.h>#include <conio.h>#include <string.h>#define COM232 0x2f8#define COMINT 0x0b#define MaxBufLen 500#define Port8259 0x20#define EofInt 0x20static int comportaddr;static char intvectnum;static unsigned char maskb;static unsigned char Buffer[MaxBufLen];static int CharsInBuf,CircIn,CircOut;static void (interrupt far *OldAsyncInt)();static void interrupt far AsyncInt(void);void Init_COM(int ComPortAddr, unsigned char IntVectNum, int Baud, unsigned char Data, unsigned char Stop, unsigned char Parity) {unsigned char High,Low;int f;comportaddr=ComPortAddr;intvectnum=IntVectNum;CharsInBuf=0;CircIn=0;CircOut=0;f=(Baud/100);f=1152/f; High=f/256;Low=f-High*256;outp(ComPortAddr+3,0x80);outp(ComPortAddr,Low);outp(ComPortAddr+1,High);Data=(Data-5)|((Stop-1)*4);if(Parity==2) Data=Data|0x18;else if(Parity==1) Data=Data|0x8;outp(ComPortAddr+3,Data);outp(ComPortAddr+4,0x0a);outp(ComPortAddr+1,0x01);disable();OldAsyncInt=getvect( IntVectNum );setvect( IntVectNum, AsyncInt );enable();maskb=inp(Port8259+1);if(IntVectNum==0x0c)outp(Port8259+1,maskb&0xef); else outp(Port8259+1,maskb&0xf7);}static void interrupt far AsyncInt(void){disable();if(CharsInBuf<MaxBufLen)Buffer[CircIn]=inp(comportaddr);if(CircIn<MaxBufLen-1) CircIn++;else CircIn=0;if(CircIn==CircOut) CircOut++;else CharsInBuf++;enable();outp(Port8259,EofInt);}void Restore(void){setvect(intvectnum,OldAsyncInt);outp(Port8259+1,maskb);}int GetCharInBuf(unsigned char *Char){int Flag;Flag=-1;if(CharsInBuf>0){(*Char)=Buffer[CircOut];if(CircOut<MaxBufLen-1)CircOut++;else CircOut=0;CharsInBuf--;Flag=0;}return Flag;}int SendChar(unsigned char Char){if((inp(comportaddr+5)&0x20)==0) return -1; outp(comportaddr,Char);return 0;}main(){int i,c;unsigned char InChar;Init_COM(COM232,COMINT,1200,8,1,0);while(1){if(kbhit()){if((InChar=getch())==27)break;else while(SendChar(InChar));}if(GetCharInBuf(&InChar)==0)printf("%c",InChar);}Restore();}接收程序:#include <dos.h>#include <fstream.h>#include <conio.h>#include <stdio.h>#include <stdlib.h>#include <math.h>#define RXD 0 //接收#define TXD 0 //发送#define LSB 0 //波特率调节低8位#define MSB 1 //波特率调节高8位#define IER 1 // 中断起用寄存器#define IIR 2 //中断标识寄存器#define LCR 3 //线路控制寄存器#define MCR 4 //调制解调器控制寄存器#define LSR 5 //线路状态寄存器#define MSR 6 //调制解调器状态寄存器#define IERV 1#define OUT2 0x08#define ERTS 2#define EDTR 1#define EMPTY 0X20#define READY 0X30#define ICREG 0X20#define IMASKREG 0X21#define EOI 0X20#define WAITCOUNT 5000#define BUFFLEN 2048 //用于存储字符的数组的界#define ALTE 0X12#define ALTQ 0X10#define SER_BAUD_1200 96#define SER_BAUD_2400 48#define SER_BAUD_9600 0x0C#define SER_BAUD_19200 6#define SER_STOP_1 0 /*/ 1 stop bit per character*/#define SER_STOP_2 4 /*/ 2 stop bits per character*/#define SER_BITS_5 0 /*/ send 5 bit characters*/#define SER_BITS_6 1 /*/ send 6 bit characters*/#define SER_BITS_7 2 /*/ send 7 bit characters*/#define SER_BITS_8 3 /*/ send 8 bit characters*/#define SER_PARITY_NONE 0 /*/ no parity*/#define SER_PARITY_ODD 8 /*/ odd parity*/#define SER_PARITY_EVEN 24 /*/ even parity*/int port;int ComNum;unsigned portaddr;unsigned portf;unsigned int baudtable[]={0x180,0xc0,0x60,0x30,0x18,0x0c,0x06};unsigned char paritytable[]={0x08,0x18,0x00,0x28,0x38};unsigned char buffer[BUFFLEN];//recv bufint buffin=0;int buffout=0;int incount=0;int outcount=0;void interrupt(*vect_com)(...);void putb(unsigned char ch)//write a char to the recvbuf 将中断得到的数据写到缓冲区{int temp;temp=buffin;if(++buffin==BUFFLEN)buffin=0;if(buffin!=buffout){buffer[buffin]=ch;// printf("bufferin[%d]=%c",buffer[buffin]);// getch();}elsebuffin=temp;};unsigned char getb()//read a char from the recvbuf{if(buffout!=buffin){if(++buffout==BUFFLEN)buffout=0;//printf("bufferout[%d]=%c",buffout,buffer[buffout]);return(buffer[buffout]);}elsereturn(0xff);};/*unsigned char sender( unsigned char ch){outportb(portaddr2+TXD,ch);printf("\nsender outportdata=%c\n",ch);outcount++;return(1);};*/void interrupt receiver(...){unsigned char ch;ch=inportb(portaddr+RXD);putb(ch);incount++; //记录接收了多少个数据。
模拟串口的三种方法及C语言
模拟串口的三种方法及C语言模拟串口是软件中模拟实现串口通信的一种方法,它是在电脑上通过软件模拟两个串口之间的传输,用来测试、调试串口相关的应用程序。
本文将介绍三种常见的模拟串口的方法,并提供C语言代码示例。
1.使用虚拟串口软件虚拟串口软件是一种用于模拟串口通信的应用程序。
它创建了虚拟的串口设备,使其在电脑上模拟出真实的串口通信环境。
通过虚拟串口软件,可以实现串口的模拟收发数据,可以连接到串口测试工具、串口调试工具或者自己编写的串口通信程序上。
以下是一个使用虚拟串口软件模拟串口通信的C语言代码示例:```c#include <stdio.h>#include <windows.h>int mai//打开虚拟串口//检测串口是否成功打开printf("Error in opening serial port\n");return 1;}//进行串口通信操作,如发送、接收数据//关闭串口return 0;```在这个示例中,我们使用了Windows操作系统的函数`CreateFile`来打开一个虚拟串口,这里的串口名称是"COM1"。
然后可以调用相关函数进行串口通信操作,最后用`CloseHandle`函数关闭串口。
2.使用串口驱动模拟在一些情况下,可以通过修改电脑的串口驱动程序来模拟串口通信。
这种方法需要更深入的了解操作系统的底层机制,并进行驱动程序的开发和修改。
通过修改串口驱动程序,可以模拟出一个虚拟的串口设备,通过这个设备进行串口通信。
以下是一个简单的C语言代码示例,用于修改串口驱动程序来模拟串口通信:```c#include <stdio.h>#include <fcntl.h>#include <unistd.h>int maiint fd;//打开串口设备fd = open("/dev/ttyS0", O_RDWR);//检测串口是否成功打开if (fd < 0)printf("Error in opening serial port\n");return 1;}//进行串口通信操作,如发送、接收数据//关闭串口设备close(fd);return 0;```在这个示例中,我们使用了Linux操作系统的函数`open`来打开一个串口设备,这里的设备名称是"/dev/ttyS0"。
串口调试助手源码

串口调试助手程序框架(一)【截图】【源码】main.cpp#include<windows.h>#include<commctrl.h>#include<iostream>#include<stdio.h>#include"resource.h"using namespace std;HINSTANCE hInst;//窗口实例HWND hRDCLEAR, hSDCLEAR;HMENU hRDCHAR;void Init(HWND hwndDlg){SetWindowText(GetDlgItem(hwndDlg, SETXONC), "0x13");SetWindowText(GetDlgItem(hwndDlg, SETXOFFC), "0x19");SetWindowText(GetDlgItem(hwndDlg, SETTO), "0");SendDlgItemMessage(hwndDlg, RDCHAR, BM_SETCHECK, 1, 0);//把RadioBox RDCHAR设置为选中SendDlgItemMessage(hwndDlg, SDCHAR, BM_SETCHECK, 1, 0);//默认发送字符SendDlgItemMessage(hwndDlg, CTASY, BM_SETCHECK, 1, 0);//默认异步通信//在一个groupbox中必须有一个radiobox的属性:组为真//串口号SetWindowText(GetDlgItem(hwndDlg, SETCOMNO), "COM4");//默认值SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM1"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM2"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM3"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM4"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM5"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM6"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM7"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM8"));SendDlgItemMessage(hwndDlg, SETCOMNO, CB_ADDSTRING, 0, (LPARAM)("COM9"));//波特率SetWindowText(GetDlgItem(hwndDlg, SETBR), "9600");//默认值SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("1200"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("2400"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("4800"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("9600"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("14400"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("28800"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("38400"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("57600"));SendDlgItemMessage(hwndDlg, SETBR, CB_ADDSTRING, 0, (LPARAM)("115200"));//数据位SetWindowText(GetDlgItem(hwndDlg, SETBS), "8");//默认值SendDlgItemMessage(hwndDlg, SETBS, CB_ADDSTRING, 0, (LPARAM)("4"));SendDlgItemMessage(hwndDlg, SETBS, CB_ADDSTRING, 0, (LPARAM)("5"));SendDlgItemMessage(hwndDlg, SETBS, CB_ADDSTRING, 0, (LPARAM)("6"));SendDlgItemMessage(hwndDlg, SETBS, CB_ADDSTRING, 0, (LPARAM)("7"));SendDlgItemMessage(hwndDlg, SETBS, CB_ADDSTRING, 0, (LPARAM)("8"));//校验位SetWindowText(GetDlgItem(hwndDlg, SETPAR), "N");//默认值SendDlgItemMessage(hwndDlg, SETPAR, CB_ADDSTRING, 0, (LPARAM)("N"));SendDlgItemMessage(hwndDlg, SETPAR, CB_ADDSTRING, 0, (LPARAM)("odd"));SendDlgItemMessage(hwndDlg, SETPAR, CB_ADDSTRING, 0, (LPARAM)("even"));//停止位SetWindowText(GetDlgItem(hwndDlg, SETSB), "1");//默认值SendDlgItemMessage(hwndDlg, SETSB, CB_ADDSTRING, 0, (LPARAM)("1"));SendDlgItemMessage(hwndDlg, SETSB, CB_ADDSTRING, 0, (LPARAM)("2"));}BOOL CALLBACK DlgMain(HWND hwndDlg, UINT uMsg, WPARAM wParam, LPARAM lParam) {//窗口回调函数switch (uMsg)//消息处理{case WM_INITDIALOG://初始化{Init(hwndDlg);}return TRUE;case WM_CLOSE://关闭窗口{EndDialog(hwndDlg, 0);}return TRUE;case WM_COMMAND://菜单消息{switch (LOWORD(wParam)){case RDCLEAR://清空接收框数据{SetWindowText(hRDCLEAR, "");}return TRUE;case SDCLEAR://清空发送框数据{SetWindowText(GetDlgItem(hwndDlg, SDTEXT), "");}return TRUE;case SDSEND://发送数据{TCHAR szBuf[80];//缓存区string temp;GetWindowText(GetDlgItem(hwndDlg, SDTEXT), szBuf, 80);//获得接收框的文本temp = szBuf;//拼接字符串//cout<<temp;SetWindowText(GetDlgItem(hwndDlg, RDTEXT), temp.c_str());}return TRUE;case SETOP:{//打开串口}return TRUE;case SETCP:{//关闭串口}return TRUE;case SETSO:{}return TRUE;}}return TRUE;}return FALSE;}int APIENTRY WinMain(HINSTANCE hInstance, HINSTANCE hPrevInstance, LPSTR lpCmdLine, int nShowCmd) {hInst = hInstance;InitCommonControls();return DialogBox(hInst, MAKEINTRESOURCE(DLG_MAIN), NULL, (DLGPROC)DlgMain);}【源码】resource.h#ifndef IDC_STATIC#define IDC_STATIC (-1)#endif#define DLG_MAIN 100#define RDBOX 40000#define RDTEXT 40001#define RDCHAR 40002#define RDHEX 40003#define RDCLEAR 40004#define SDCHAR 40005#define SDHEX 40006#define SDCLEAR 40007#define SDSEND 40008#define SDAS 40009#define SDASTIME 40010#define SETCOMNO 40011#define CTSYN 40012#define CTASY 40013#define SETBR 40014#define SDTEXT 40015#define SETXONC 40016#define SETXOFFC 40017#define SETTO 40018#define SETPAR 40019#define SETSB 40020#define SETBS 40021#define SETOP 40022#define SETCP 40023#define SETSO 40024【源码】resource.rc#include<windows.h>#include<commctrl.h>#include<richedit.h>#include"resource.h"//// Dialog resources//LANGUAGE LANG_NEUTRAL, SUBLANG_NEUTRALDLG_MAIN DIALOG 0, 0, 635, 304STYLE DS_3DLOOK| DS_CENTER| DS_MODALFRAME| DS_SHELLFONT| WS_CAPTION| WS_VISIBLE| WS_POPUP| WS_SYSMENU CAPTION "SerialPortDebug"FONT 8, "Ms Shell Dlg"{GROUPBOX "Setting", 0, 257, 7, 365, 290, 0, WS_EX_LEFTLTEXT "Select Port", 0, 284, 30, 36, 8, SS_LEFT, WS_EX_LEFTGROUPBOX "Communication Type", 0, 278, 62, 295, 35, 0, WS_EX_LEFTLTEXT "ByteSize", 0, 469, 120, 28, 8, SS_LEFT, WS_EX_LEFTLTEXT "BaudRate", 0, 297, 122, 33, 8, SS_LEFT, WS_EX_LEFTGROUPBOX "Send Data", 0, 12, 135, 240, 162, 0, WS_EX_LEFTLTEXT "StopBits", 0, 471, 161, 27, 8, SS_LEFT, WS_EX_LEFTLTEXT "Parity", 0, 299, 162, 18, 8, SS_LEFT, WS_EX_LEFTAUTOCHECKBOX "fParity", 0, 401, 162, 35, 8, 0, WS_EX_LEFTAUTOCHECKBOX "CTS", 0, 296, 202, 30, 8, 0, WS_EX_LEFTAUTOCHECKBOX "DSR", 0, 365, 202, 31, 8, 0, WS_EX_LEFTAUTOCHECKBOX "DTR", 0, 436, 202, 31, 8, 0, WS_EX_LEFTAUTOCHECKBOX "XON/XOFF", 0, 507, 202, 53, 8, 0, WS_EX_LEFTLTEXT "ms", 0, 131, 228, 10, 8, SS_LEFT, WS_EX_LEFTLTEXT "ms", 0, 562, 237, 10, 8, SS_LEFT, WS_EX_LEFTLTEXT "XonChar", 0, 293, 238, 28, 8, SS_LEFT, WS_EX_LEFTLTEXT "XoffChar", 0, 383, 238, 28, 8, SS_LEFT, WS_EX_LEFTLTEXT "Timeouts", 0, 478, 238, 30, 8, SS_LEFT, WS_EX_LEFTGROUPBOX "Receive Data", RDBOX, 15, 10, 235, 120, 0, WS_EX_LEFTEDITTEXT RDTEXT, 20, 25, 225, 75, ES_AUTOHSCROLL | ES_MULTILINE | ES_READONLY, WS_EX_LEFTAUTORADIOBUTTON "Char", RDCHAR, 26, 112, 31, 8, WS_GROUP, WS_EX_LEFTAUTORADIOBUTTON "Hex", RDHEX, 80, 112, 29, 8, 0, WS_EX_LEFTPUSHBUTTON "Clear", RDCLEAR, 196, 108, 45, 14, 0, WS_EX_LEFTAUTORADIOBUTTON "Char", SDCHAR, 26, 208, 31, 8, WS_GROUP, WS_EX_LEFTAUTORADIOBUTTON "Hex", SDHEX, 82, 208, 29, 8, 0, WS_EX_LEFTPUSHBUTTON "Clear", SDCLEAR, 132, 204, 45, 14, 0, WS_EX_LEFTPUSHBUTTON "Send", SDSEND, 196, 204, 45, 14, 0, WS_EX_LEFTAUTOCHECKBOX "Auto send", SDAS, 26, 228, 48, 8, 0, WS_EX_LEFTEDITTEXT SDASTIME, 86, 225, 40, 14, ES_RIGHT | ES_AUTOHSCROLL, WS_EX_LEFTCOMBOBOX SETCOMNO, 337, 27, 95, 30, CBS_DROPDOWN | CBS_HASSTRINGS, WS_EX_LEFTAUTORADIOBUTTON "Synchronous ", CTSYN, 326, 75, 59, 8, WS_GROUP, WS_EX_LEFTAUTORADIOBUTTON "Asynchronous ", CTASY, 472, 77, 63, 8, 0, WS_EX_LEFTCOMBOBOX SETBR, 337, 120, 48, 30, CBS_DROPDOWN | CBS_HASSTRINGS, WS_EX_LEFTEDITTEXT SDTEXT, 20, 147, 227, 45, ES_AUTOHSCROLL, WS_EX_LEFTEDITTEXT SETXONC, 325, 235, 40, 14, ES_AUTOHSCROLL, WS_EX_LEFTEDITTEXT SETXOFFC, 417, 235, 40, 14, ES_AUTOHSCROLL, WS_EX_LEFTEDITTEXT SETTO, 512, 235, 40, 14, ES_AUTOHSCROLL, WS_EX_RIGHTCOMBOBOX SETPAR, 338, 160, 48, 30, CBS_DROPDOWN | CBS_HASSTRINGS, WS_EX_LEFTCOMBOBOX SETSB, 512, 159, 48, 30, CBS_DROPDOWN | CBS_HASSTRINGS, WS_EX_LEFTCOMBOBOX SETBS, 512, 117, 48, 30, CBS_DROPDOWN | CBS_HASSTRINGS, WS_EX_LEFTPUSHBUTTON "Open Port", SETOP, 297, 272, 45, 14, 0, WS_EX_LEFTPUSHBUTTON "Close Port", SETCP, 387, 272, 45, 14, 0, WS_EX_LEFTDEFPUSHBUTTON "Stop I/O", SETSO, 473, 271, 45, 14, 0, WS_EX_LEFT}//// Manifest resources//LANGUAGE LANG_NEUTRAL, SUBLANG_NEUTRAL1 RT_MANIFEST".\\manifest.xml"【源码】manifest.xml< ? xml version = "1.0" encoding = "UTF-8" standalone = "yes" ? ><assembly xmlns = "urn:schemas-microsoft-com:asm.v1" manifestVersion = "1.0"><dependency><dependentAssembly><assemblyIdentity type = "win32" name = "mon-Controls" version = "6.0.0.0" processorArchitecture = "*" publicKeyToken = "6595b64144ccf1df" language = "*" / >< / dependentAssembly>< / dependency><trustInfo xmlns = "urn:schemas-microsoft-com:asm.v3"><security><requestedPrivileges><requestedExecutionLevel level = "asInvoker" uiAccess = "false" / > < / requestedPrivileges> < / security>< / trustInfo>< / assembly>。
VC实现串口通信项目源码

VC实现串口通信项目源码以下是一个简单的串口通信项目的VC实现源码,包括了串口初始化、发送数据、接收数据等基本功能。
```#include <Windows.h>#include <stdio.h>#define BUFFER_SIZE 1024HANDLE hSerial;//初始化串口参数BOOL InitSerialPort//打开串口hSerial = CreateFile("\\\\.\\COM1", GENERIC_READ ,GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE)printf("Failed to open serial port\n");return FALSE;}//配置串口参数DCB dcbSerialParams = { 0 };dcbSerialParams.DCBlength = sizeof(dcbSerialParams); printf("Failed to get serial port state\n"); CloseHandle(hSerial);return FALSE;}dcbSerialParams.BaudRate = CBR_9600; // 波特率为9600 dcbSerialParams.ByteSize = 8; // 8位数据位dcbSerialParams.Parity = NOPARITY; // 无奇偶校验dcbSerialParams.StopBits = ONESTOPBIT;// 1位停止位printf("Failed to set serial port state\n"); CloseHandle(hSerial);return FALSE;}//设置超时操作CloseHandle(hSerial);return FALSE;}return TRUE;//发送数据BOOL SendData(const char* data)DWORD bytesWritten;if (!WriteFile(hSerial, data, strlen(data), &bytesWritten, NULL))printf("Failed to send data\n");CloseHandle(hSerial);return FALSE;}return TRUE;//接收数据BOOL ReceiveData(char* buffer, DWORD size)DWORD bytesRead;if (!ReadFile(hSerial, buffer, size, &bytesRead, NULL))printf("Failed to receive data\n");CloseHandle(hSerial);return FALSE;}return TRUE;if (!InitSerialPort()return 1;}char sendBuffer[BUFFER_SIZE];char receiveBuffer[BUFFER_SIZE];//发送数据printf("Enter data to send: ");gets_s(sendBuffer, BUFFER_SIZE);if (!SendData(sendBuffer))return 1;}//接收数据printf("Receiving data...\n");if (!ReceiveData(receiveBuffer, BUFFER_SIZE)) return 1;}printf("Received data: %s\n", receiveBuffer); CloseHandle(hSerial);```这个项目使用了Windows的串口通信API函数来实现串口的初始化、发送数据和接收数据操作。
c语言怎么写串口通信编程
c语言怎么写串口通信编程串口通信是一种广泛应用于嵌入式系统和电子设备之间的通信方式。
无论是嵌入式开发还是电子设备控制,串口通信都是常见的需求。
在C语言中,实现串口通信需要通过操作串口的硬件寄存器和使用相应的通信协议来实现数据的发送和接收。
本文将一步一步介绍如何使用C语言编写串口通信程序。
第一步:打开串口要开始串口通信,首先需要打开串口。
在C语言中,可以使用文件操作函数来打开串口设备。
通常,串口设备被命名为/dev/ttyS0,/dev/ttyS1等,具体名称取决于系统。
下面是一个打开串口设备的示例代码:cinclude <stdio.h>include <fcntl.h>include <termios.h>int open_serial_port(const char *port) {int fd = open(port, O_RDWR O_NOCTTYO_NDELAY);if (fd == -1) {perror("open_serial_port");return -1;}设置串口属性struct termios options;tcgetattr(fd, &options);cfmakeraw(&options);cfsetspeed(&options, B9600);tcsetattr(fd, TCSANOW, &options);return fd;}int main() {const char *port = "/dev/ttyS0";int fd = open_serial_port(port);if (fd == -1) {打开串口失败,处理错误return -1;}串口已打开,可以进行数据的读写操作return 0;}在上面的代码中,open_serial_port函数用于打开指定的串口设备并进行一些必要的设置。
C语言串口通信源代码
C语言串口通信源代码#include#include#include#include#define COM232 0x2f8#define COMINT 0x0b#define MaxBufLen 500#define Port8259 0x20#define EofInt 0x20static int comportaddr;static char intvectnum;static unsigned char maskb;static unsigned char Buffer[MaxBufLen];static int CharsInBuf,CircIn,CircOut;static void (interrupt far *OldAsyncInt)();static void interrupt far AsyncInt(void);void Init_COM(int ComPortAddr, unsigned char IntVectNum, int Baud, unsigned char Data, unsigned char Stop, unsigned char Parity){unsigned char High,Low;int f;comportaddr=ComPortAddr;intvectnum=IntVectNum;CharsInBuf=0;CircIn=0;CircOut=0;f=(Baud/100);f=1152/f; High=f/256;Low=f-High*256;outp(ComPortAddr+3,0x80);outp(ComPortAddr,Low);outp(ComPortAddr+1,High);Data=(Data-5)|((Stop-1)*4);if(Parity==2) Data=Data|0x18;else if(Parity==1) Data=Data|0x8;outp(ComPortAddr+3,Data);outp(ComPortAddr+4,0x0a);outp(ComPortAddr+1,0x01);disable();OldAsyncInt=getvect( IntVectNum );setvect( IntVectNum, AsyncInt );enable();maskb=inp(Port8259+1);if(IntVectNum==0x0c)outp(Port8259+1,maskb&0xef); else outp(Port8259+1,maskb&0xf7);}static void interrupt far AsyncInt(void){disable();if(CharsInBuf<maxbuflen)< bdsfid="112" p=""></maxbuflen)<>Buffer[CircIn]=inp(comportaddr);if(CircIn<="" p="">else CircIn=0;if(CircIn==CircOut) CircOut++;else CharsInBuf++;enable();outp(Port8259,EofInt);}void Restore(void){setvect(intvectnum,OldAsyncInt);outp(Port8259+1,maskb);}int GetCharInBuf(unsigned char *Char){int Flag;Flag=-1;if(CharsInBuf>0){(*Char)=Buffer[CircOut];if(CircOut<maxbuflen-1)circout++;< bdsfid="135" p=""></maxbuflen-1)circout++;<>else CircOut=0;CharsInBuf--;Flag=0;}return Flag;}int SendChar(unsigned char Char){if((inp(comportaddr+5)&0x20)==0) return -1;outp(comportaddr,Char);return 0;}main(){int i,c;unsigned char InChar;Init_COM(COM232,COMINT,1200,8,1,0);while(1){if(kbhit()){if((InChar=getch())==27)break;else while(SendChar(InChar));}if(GetCharInBuf(&InChar)==0)printf("%c",InChar);}Restore();}接收程序:#include#include#include#include#include#include #define RXD 0 //接收#define TXD 0 //发送#define LSB 0 //波特率调节低8位#define MSB 1 //波特率调节高8位#define IER 1 // 中断起用寄存器#define IIR 2 //中断标识寄存器#define LCR 3 //线路控制寄存器#define MCR 4 //调制解调器控制寄存器#define LSR 5 //线路状态寄存器#define MSR 6 //调制解调器状态寄存器#define IERV 1#define OUT2 0x08#define ERTS 2#define EDTR 1#define EMPTY 0X20#define READY 0X30#define ICREG 0X20#define IMASKREG 0X21#define EOI 0X20#define WAITCOUNT 5000 #define BUFFLEN 2048 //用于存储字符的数组的界#define ALTE 0X12#define ALTQ 0X10#define SER_BAUD_1200 96#define SER_BAUD_2400 48#define SER_BAUD_9600 0x0C#define SER_BAUD_19200 6 #define SER_STOP_1 0 /*/ 1 stop bit per character*/ #define SER_STOP_2 4 /*/ 2 stop bits per character*/ #define SER_BITS_5 0 /*/ send 5 bit characters*/ #define SER_BITS_6 1 /*/ send 6 bit characters*/ #define SER_BITS_7 2 /*/ send 7 bit characters*/ #define SER_BITS_8 3 /*/ send 8 bit characters*/ #define SER_PARITY_NONE 0 /*/ no parity*/ #define SER_PARITY_ODD 8 /*/ odd parity*/ #define SER_PARITY_EVEN 24 /*/ even parity*/int port;int ComNum;unsigned portaddr;unsigned portf;unsigned int baudtable[]={0x180,0xc0,0x60,0x30,0x18,0x0c,0x06};unsigned char paritytable[]={0x08,0x18,0x00,0x28,0x38};unsigned char buffer[BUFFLEN];//recv bufint buffin=0;int buffout=0;int incount=0;int outcount=0;void interrupt(*vect_com)(...); void putb(unsigned char ch)//write a char to the recvbuf 将中断得到的数据写到缓冲区{int temp;temp=buffin;if(++buffin==BUFFLEN)buffin=0;if(buffin!=buffout){buffer[buffin]=ch;// printf("bufferin[%d]=%c",buffer[buffin]);// getch();}elsebuffin=temp;};unsigned char getb()//read a char from the recvbuf{if(buffout!=buffin){if(++buffout==BUFFLEN)buffout=0;//printf("bufferout[%d]=%c",buffout,buffer[buffout]);return(buffer[buffout]);}elsereturn(0xff);};/*unsigned char sender( unsigned char ch){outportb(portaddr2+TXD,ch);printf("\nsender outportdata=%c\n",ch); outcount++;return(1);};*/void interrupt receiver(...){unsigned char ch;ch=inportb(portaddr+RXD);putb(ch);incount++; //记录接收了多少个数据。
C51单片机串口通讯通用模块代码(可用于操作系统串口通讯)

C51单片机串口通讯通用模块代码(可用于操作系统串口通讯)#include#include "UART1.h"#include "commdriver.h"//当前适用于C51//可以根据具体CPU型号,修改宏定义和串口初始化代码就可以#define CPU_XTAL 22118400 //CPU频率#define FUNCTION_NULL 0 //没有定义函数#define COM_TI TI //发送中断寄存器#define COM_TI0() {TI = 0;} //发送中断寄存器清零#define COM_TI1() {TI = 1;} //发送中断寄存器置一( 强行置一触发发送中断)#define COM_TI_SBUF(dat) {SBUF = dat;} //发送数据到硬件缓冲区#define COM_TI_End() {return;} //发送结束处理函数#define COM_RI RI //接收中断寄存器#define COM_RI0() {RI = 0;} //接收中断寄存器清零#define COM_RI1() {RI = 1;} //接收中断寄存器置一#define COM_RI_SBUF(dat) {dat = SBUF;} //提取接收硬件缓冲区数据#define COM_TI_FLAG COM_TI //发送中断标志寄存器(非中断发送方式使用)#define COM_TI_FLAG0() COM_TI0() //发送中断标志寄存器清零(非中断发送方式使用)void (*COM1RevEvent)(unsigned char dat); //数据接收事件#define LenTxBuf 30 //发送缓冲区长度#define LenRxBuf 1 //接收缓冲区长度volatile unsigned char TxBuf1[LenTxBuf],RxBuf1[LenRxBuf]; //收发缓冲区实体volatile unsigned char *inTxBuf1,*outTxBuf1,*inRxBuf1,*outRxBuf1; //收发缓冲区读写指针volatile unsigned char TIflag1=1;//Note:It must be 1. //发送缓冲区为空标志//*********************#define _TxBuf TxBuf1#define _RxBuf RxBuf1#define _inTxBuf inTxBuf1#define _outTxBuf outTxBuf1#define _inRxBuf inRxBuf1#define _outRxBuf outRxBuf1#define _TIflag TIflag1/*************函数声明****************/#define _COMRevEvent COM1RevEvent //串口接收事件#define _USART_IRQ void USART1_IRQHandler(void) interrupt 4 //串口中断服务程序#define _COM_Buffer_Init void COM1_Buffer_Init(void) //串口缓冲区初始化#define _COM_Open void COM1_Open(unsigned int baudrate,void (*revevent)(unsigned char dat)) // 串口初始化#define _COM_Close void COM1_Close(void) //关闭串口#define _COM_GetOneByte unsigned charCOM1_GetOneByte(unsigned char *ch) //获取一个字节#define _COM_GetPChar unsigned char COM1_GetPChar(unsigned char *ch,unsigned char len) //获取指定长度字节数组#define _COM_RxByte unsigned char COM1_RxByte(void) //获取接收字节个数//********缓冲区中断方式发送(安全性高)#define _COM_SendOneByte unsigned char COM1_SendOneByte(unsigned char one_byte) // 发送一个字节#define _COM_SendPChar void COM1_SendPChar(unsigned char *P,unsigned char Len) //发送定长字节数组#define _COM_SendString void COM1_SendString(unsigned char *P) //发送字符串//********非缓冲区中断方式发送#define _COM_PrintOneByte void COM1_PrintOneByte(unsigned char c) // 发送一个字节#define _COM_PrintPChar void COM1_PrintPChar(unsigned char *buf,unsigned int len) //发送定长字节数组#define _COM_PrintString void COM1_PrintString(unsigned char *P) //发送字符串//*************内部引用模型函数(外部不关心,移植时修改后面函数名,要与上面对应的外部声明的函数名一致)*******************#define COM_GetOneByte_(ptr) COM1_GetOneByte(ptr) //与上面获取一个字节的函数对应#define COM_SendOneByte_(dat) COM1_SendOneByte(dat) //与上面发送一个字节的函数对应#define COM_PrintOneByte_(dat) COM1_PrintOneByte(dat) //与上面发送一个字节的函数对应//*********************函数模型定义区(不需要修改)*****************/****************************函数模型:void USART_IRQHandler(void)函数功能:串口中断服务程序入口参数:无返回值:无修改者:修改时间:修改内容简要:***************************/_USART_IRQ //串口1中断{volatile unsigned char *t;if(COM_RI){COM_RI0(); //清接收标记if(_COMRevEvent != FUNCTION_NULL) //自定义接收事件{COM_RI_SBUF(*_inRxBuf);_COMRevEvent(*_inRxBuf);}else{t = _inRxBuf;t++;if(t == (_RxBuf + LenRxBuf)) t = _RxBuf;if(t != _outRxBuf) //RxBuf No Full{COM_RI_SBUF(*_inRxBuf);_inRxBuf = t;}}}if(COM_TI){COM_TI0();if(_inTxBuf == _outTxBuf) {_TIflag = 1;COM_TI_End();};//TxBuf1 EmptyCOM_TI_SBUF(*_outTxBuf); _outTxBuf++;if(_outTxBuf == (_TxBuf+LenTxBuf)) _outTxBuf = _TxBuf;}}/****************************函数模型:void COM1_Buffer_Init(void)函数功能:串口1缓冲区初始化入口参数:无返回值:无修改者:修改时间:修改内容简要:***************************/_COM_Buffer_Init{_inTxBuf = _TxBuf;_outTxBuf = _TxBuf;_inRxBuf = _RxBuf;_outRxBuf = _RxBuf;}/****************************函数模型:void COM_Open(unsigned int baudrate,void (*revevent)(unsigned char dat))函数功能:系统串口初始化入口参数: unsigned int baudrate:串口波特率返回值:无修改者:修改时间:修改内容简要:***************************/_COM_Open{//定时器1做波特率发生器TI = 0; /* clear transmit interrupt */TR1 = 0; /* stop timer 1 */ET1 = 0; /* disable timer 1 interrupt */PCON |= 0x80; /* 0x80=SMOD: set serial baudrate doubler */ TMOD &= ~0xF0; /* clear timer 1 mode bits */TMOD |= 0x20; /* put timer 1 into MODE 2 */TH1 = (unsigned char) (256 - (CPU_XTAL / (16L * 12L * baudrate)));TR1 = 1; /* start timer 1 *///设置串口1模式SM0 = 0; SM1 = 1; /* serial port MODE 1 */SM2 = 0;REN = 1; /* enable serial receiver */RI = 0; /* clear receiver interrupt */TI = 0; /* clear transmit interrupt */ES = 1; /* enable serial interrupts */PS = 1; /* set serial interrupts to low priority */_COMRevEvent = revevent;}/****************************函数模型:void COM1_Close(void)函数功能:关闭系统串口入口参数:无返回值:无修改者:修改时间:修改内容简要:***************************/_COM_Close{}/****************************函数模型:unsigned char COM1_GetOneByte(unsigned char *ch)函数功能:获取一个字节入口参数:unsigned char *ch:接收字节指针返回值: unsigned char *ch:接收字节指针unsigned char :获取状态;0:成功,1:失败(缓冲区为空)修改者:修改时间:修改内容简要:***************************/_COM_GetOneByte{if(_inRxBuf == _outRxBuf) {return 0;}; //RxBuf Empty*ch = *_outRxBuf; _outRxBuf++;if(_outRxBuf==_RxBuf+LenRxBuf) _outRxBuf = _RxBuf;return 1;}/****************************函数模型:unsigned char COM_GetPChar(unsigned char *ch,unsigned char len)函数功能:获取指定长度字节数组入口参数: unsigned char *ch:接收字节数组指针unsigned char len:接收字节个数返回值: unsigned char *ch:接收字节数组指针unsigned char:实际接收字节个数修改者:修改时间:修改内容简要:***************************/_COM_GetPChar{unsigned char i = 0;do{len--;if(!COM_GetOneByte_(ch)) break;i++;ch++;}while(len);return i;}/****************************函数模型:unsigned char COM_RxByte(void)函数功能:获取接收缓冲区有效字节个数入口参数:无返回值: unsigned char:接收缓冲区有效字节个数修改者:修改时间:修改内容简要:***************************/_COM_RxByte{if(_inRxBuf>=_outRxBuf) return (_inRxBuf-_outRxBuf);else return LenRxBuf-(_outRxBuf-_inRxBuf);}/****************************函数模型:unsigned char COM_SendOneByte(unsigned char one_byte)函数功能:发送一个字节入口参数: unsigned char one_byte:发送的字节返回值:unsigned char:发送状态,0:成功,1:失败(缓冲区满)修改者:修改时间:修改内容简要:***************************/_COM_SendOneByte{volatile unsigned char *t;if(_TIflag){_TIflag = 0;COM_TI1();}t = _inTxBuf;t++;if(t == _TxBuf + LenTxBuf) t = _TxBuf;if(t == _outTxBuf) {return 1;};//TxBuf Full*_inTxBuf = one_byte;_inTxBuf = t;return 0;}/****************************函数模型:void COM_SendPChar(unsigned char *P,unsigned char Len)函数功能:发送定长字节数组入口参数: unsigned char *P:字节数组指针unsigned char Len:发送长度返回值:无修改者:修改时间:修改内容简要:***************************/_COM_SendPChar{while(Len){//while(COM1_SendOneByte(*P)); //发送失败,继续发送,知道发送成功COM_SendOneByte_(*P);P++;Len--;}}/****************************函数模型:void COM_SendString(unsigned char *P)函数功能:发送字符串入口参数: unsigned char *P:字符串指针返回值:无修改者:修改时间:修改内容简要:***************************/_COM_SendString{while(*P){COM_SendOneByte_(*P);P++;}}//**************** 非缓冲区中断方式发送/****************************函数模型:void COM_PrintOneByte(unsigned char c)函数功能:发送一个字节入口参数: unsigned char one_byte:发送的字节返回值:无修改者:修改时间:修改内容简要:***************************/_COM_PrintOneByte{COM_TI_FLAG0();COM_TI_SBUF(c); //发送数据while(!COM_TI_FLAG) ; //等待发送结束}/****************************函数模型:void COM_PrintPChar(unsigned char *buf,unsigned int len)函数功能:发送定长字节数组入口参数: unsigned char *P:字节数组指针unsigned char Len:发送长度返回值:无修改者:修改时间:修改内容简要:***************************/_COM_PrintPChar{while(len){COM_PrintOneByte_(*buf);buf ++;len--;}}/****************************函数模型:void COM_PrintString(unsigned char *P) 函数功能:发送字符串入口参数: unsigned char *P:字符串指针返回值:无修改者:修改时间:修改内容简要:***************************/_COM_PrintString{while(*P){COM_PrintOneByte_(*P);P++;}}。
串口调试助手源代码
串口调试助手预源代码using System;using System.Collect ion s.Ge neric;using p onen tModel;using System.Data;using System.Draw ing;using System.Linq;using System.Text;using System.Thread in g.Tasks;using System.Wi ndows.Forms;using Syste m.IO;using Syste m.IO .Ports;using System.Thread ing;using DevExpress.XtraEditors;using System.Text.RegularExpressi ons;n amespace Win dowsFormsApplicatio n3 {public partial class Form1 : XtraForm {SerialPort sp1 = new SerialPort(); int Flag = 0;int StateCha nged = 0;int StateCha nged_Ascii = 1; int StateCha nged_16 = 0;string Temp = null;stri ng Temp_memoSe nd = n ull;private void memoSe nd_EditValueCha nged(object sen der, Even tArgs e) { - }public Form1(){In itializeComp onen t();sp1.DataReceived += sp1_DataReceived; }private void Form1_Load(object sen der, Even tArgs e) { -this.MaximizeBox = false;// 检查是否有串口stri ng[] str = SerialPort.GetPortNames();if (str == null) __________ |{MessageBox.Show(”本机没有串口!", "error");return;}// 添加串口项目foreach (stri ng port in Syste m.IO.P orts.SerialPort.GetPortNames()) { cbSerial.Properties .I tems.Add(port);}// 串口设置默认选择项cbSerial.Selectedl ndex = 0;Con trol.CheckForlllegalCrossThreadCalls = false; spl.DataReceived += new SerialDataReceivedEve ntHa ndler(sp1_DataReceived); //订阅委托e)//SerialPort sp1 = new SerialPort();if (!sp1.lsOpe n)〃串口是关闭的,设置参数,打开串口{try{// 获取串口号string serialName = cbSerial.Selectedltem.ToString(); sp1.PortName = serialName;// 设置各参数stri ng strBaudRate = cbBaudRate.Text;string strDateBits = cbDataBits.Text;string strStopBits = cbStop.Text;sp1.BaudRate = Con vert.ToI nt32(strBaudRate);〃波特率sp1.DataBits = Con vert.ToI nt32(strDateBi ts);// 数据位switch (cbStop.Text) // 停止位{case "1":sp1.StopBits = StopBits. On e;break;case "1.5":sp1.StopBits = StopBits. On e;break;case "2":sp1.StopBits = StopBits.Two;break; default:case " 奇校验":sp1.Parity = Parity.Odd; break;精品文档", "Error");case "偶校验":spl.Parity = Parity.Eve n; break; default:MessageBox.Show("Error: 参数不正确!break;labSerial.Text =" 串口号:” + sp1 .P ortName; labState.Text ="状 态:打开";}catch (System.Excepti on ex) {MessageBox.Show("Error:" + ex.Message, "Error"); return; } } }//private void CloseSerial_Click(object sen der, Even tArgs e) 〃{// if (sp1.lsOpe n) // { // sp1.Close(); // labSerial.Text =" 串口号:” + sp1.PortName; // labState.Text ="状 态:关闭";// } 〃}private void Sen d_Click(object sen der, Even tArgs e) { - stri ng StrSe nd = memoSe nd.Text; if (!sp1.lsOpe n) {MessageBox.Show (” 请先打开串口! ", "Error");return; } else {if (rbt nSen dStr.Checked)//〃bt nOpe n.En abled =false; 字符串发送{if (ckTimeSe nd.Checked&& !(stri ng.lsNullOrEmpty(textTime.Text)))//判断是否定时发送数据{string Time = textTime.Text;tmSe nd.l nterval = int. Parse(Time) * 1000;//时间单位是秒,化成毫秒单位后的空格//stri ng StrSe nd_2 = StrSe nd_1.Replace (” ", ""); //stri ng StrSe nd_3 = stri ng.J oi n (” ",Regex.Matches(StrSend_2, @"..|.").Cast<Match>().ToList());stri ng[] StrArray = StrSe nd_1.Split(' '); // 用空格符隔开字符串数组var Str_Se nd = new List<stri ng>();// i nt byteBufferLe ngth = StrArray.Le ngth; 数组StrArray 的长度for (int i = 0; i < StrArray.Le ngth; i++){if (StrArray[i].Trim()=="") {//byteBufferLe ngth--; con ti nue; }else} else //{if (ckTimeSe nd.Checked&& !(string.IsNullOrEmpty(textTime.Text))){卜六进制发送//tmSe nd.Start();//开启定时器{if (StrArray[i].Le ngth < 3){Str_Se nd.Add(StrArray[i]);}else{Str_Se nd.AddRa nge(Devide(StrArray[i]));}}}int byteBufferLe ngth = Str_Se nd.Cou nt; byte[] byteBuffer = new byte[byteBufferLe ngth];in t ii = 0;//decNum = Con vert.ToI nt32(Str_Se nd[i], 16); // 把字符串转成16进制数〃byteBuffer[ii] = Co nvert.ToByte(decNum);〃}try{decNum = Con vert.ToI nt32(Str_Se nd[i], 16); // 把字符串转成16进制数byteBuffer[ii] = Co nvert.ToByte(decNum);}catch (System.Exceptio n ex){MessageBox.Show(”输入错误!","提示");return;}ii++;}sp1.Write(byteBuffer, 0, byteBuffer.Length);// 从第0个开始写入byteBuffer ,长度bytebuffer 的长度。
Comassistant串口助手详解和源代码分析
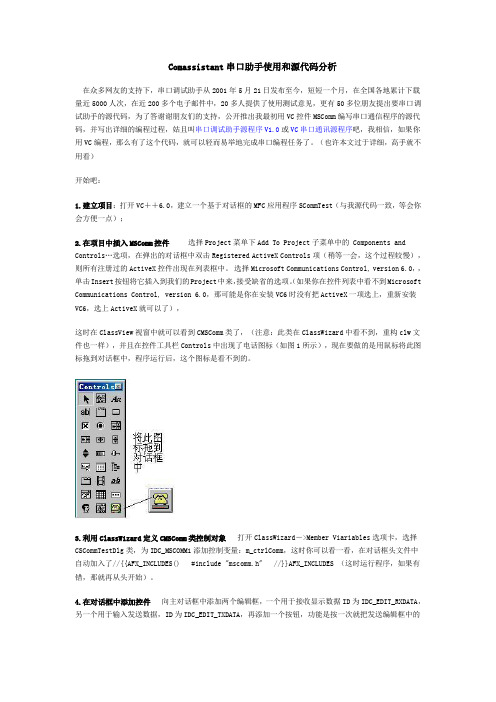
到目前为止还不能在接收编辑框中看到数据,因为我们还没有打开串口,但运行程序不应该有任何错误, 不然,你肯定哪儿没看仔细,因为我是打开 VC6 对照着做一步写一行的,运行试试。没错吧?那么做下一 步: 6.打开串口和设置串口参数 码: // TODO: Add extra initialization here if(m_ctrlComm.GetPortOpen()) m_ctrlComm.SetPortOpen(FALSE); m_ctrlComm.SetCommPort(1); //选择 com1 if( !m_ctrlComm.GetPortOpen()) m_ctrlComm.SetPortOpen(TRUE);//打开串口 else AfxMessageBox("cannot open serial port"); m_ctrlComm.SetSettings("9600,n,8,1"); //波特率 9600,无校验,8 个数据位,1 个停止位 m_ctrlComm.SetInputModel(1); //1:表示以二进制方式检取数据 m_ctrlComm.SetRThreshold(1); //参数 1 表示每当串口接收缓冲区中有多于或等于 1 个字符时将引发一个接收数据的 OnComm 事件 m_ctrlComm.SetInputLen(0); //设置当前接收区数据长度为 0 m_ctrlComm.GetInput();//先预读缓冲区以清除残留数据 现在你可以试试程序了,将串口线接好后(不会接?去看看我写的串口接线基本方法),打开串口调试助 手,并将串口设在 com2,选上自动发送,也可以等会手动发送。再执行你编写的程序,接收框里应该有数 据显示了。 7.发送数据 先为发送按钮添加一个单击消息即 BN_CLICKED 处理函数,打开 ClassWizard->Message 你可以在你需要的时候打开串口, 例如在程序中做一个开始按钮, 在该按钮
qt串口通信c语言代码
qt串口通信c语言代码
引言概述:
QT串口通信是一种基于C语言的编程技术,它可以实现计算机与外部设备之间的数据交互。
本文将从五个大点出发,详细阐述QT串口通信的C语言代码实现。
正文内容:
1. 串口通信的基本原理
1.1 串口通信的定义和作用
1.2 串口通信的工作原理
1.3 串口通信的数据传输方式
2. QT串口通信的C语言代码实现
2.1 QT串口通信的环境搭建
2.2 QT串口通信的代码编写
2.3 QT串口通信的数据收发处理
3. QT串口通信的常见问题与解决方法
3.1 串口通信的波特率设置问题
3.2 数据传输的校验与校验位设置问题
3.3 数据的发送与接收缓冲区处理问题
4. QT串口通信的扩展功能
4.1 串口通信的多线程处理
4.2 串口通信的数据转换与解析
4.3 串口通信的错误处理与异常情况处理
5. QT串口通信的应用实例
5.1 串口通信在嵌入式系统中的应用
5.2 串口通信在数据采集与监控系统中的应用
5.3 串口通信在机器人控制系统中的应用
总结:
通过本文的阐述,我们了解了QT串口通信的C语言代码实现。
首先,我们介绍了串口通信的基本原理,包括定义和作用、工作原理以及数据传输方式。
然后,我们详细讲解了QT串口通信的C语言代码实现,包括环境搭建、代码编写和数据收发处理。
接着,我们列举了一些常见问题,并提供了解决方法。
此外,我们还介绍了QT串口通信的扩展功能和应用实例,展示了其在不同领域的应用前景。
通过学习和实践,我们可以更好地掌握QT串口通信的C语言代码编写技巧,为实际应用提供有力支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
该程序全部由C写成没有C++ 更没用MFC完全是自娱自乐给需要的人一个参考#include "stdafx.h"#include <windowsx.h>#include "resource.h"#include "MainDlg.h"#include <windows.h>#include <stdio.h>#include <stdlib.h>HANDLE hComm;//用于获取串口打开函数的返回值(句柄或错误值)OVERLAPPED m_ov;COMSTAT comstat;DWORD m_dwCommEvents;TCHAR cRecs[200],cSends[100]; //接收字符串发送字符串char j=0,*cCom; //接收用统计数据大小变量端口选择BOOL WINAPI Main_Proc(HWND hWnd, UINT uMsg, WPARAM wParam, LPARAM lParam){switch(uMsg){HANDLE_MSG(hWnd, WM_INITDIALOG, Main_OnInitDialog); HANDLE_MSG(hWnd, WM_COMMAND, Main_OnCommand); HANDLE_MSG(hWnd,WM_CLOSE, Main_OnClose);}return FALSE;}/*系统初始化函数*/BOOL Main_OnInitDialog(HWND hwnd, HWND hwndFocus, LPARAM lParam){HWND hwndCombo1=GetDlgItem(hwnd,IDC_COMBO1);ComboBox_InsertString(hwndCombo1,-1,TEXT("COM1"));ComboBox_InsertString(hwndCombo1,-1,TEXT("COM2"));ComboBox_InsertString(hwndCombo1,-1,TEXT("COM3"));ComboBox_InsertString(hwndCombo1,-1,TEXT("COM4"));ComboBox_InsertString(hwndCombo1,-1,TEXT("COM5"));ComboBox_SetCurSel(hwndCombo1,0);void CALLBACK TimerProc (HWND hwnd, UINT message, UINT iTimerID, DWORD dwTime);SetTimer(hwnd,1,1000,TimerProc);return TRUE;}/*监视串口错误时使用的函数*/bool ProcessErrorMessage(char* ErrorText){char *Temp = new char[200];LPVOID lpMsgBuf;FormatMessage(FORMAT_MESSAGE_ALLOCATE_BUFFER |FORMAT_MESSAGE_FROM_SYSTEM,NULL,GetLastError(),MAKELANGID(LANG_NEUTRAL, SUBLANG_DEFAULT), // Default language(LPTSTR) &lpMsgBuf,NULL);sprintf(Temp, "WARNING: %s Failed with the following error:\n%s\nPort: %d\n", (char*)ErrorText, lpMsgBuf, "com2"); MessageBox(NULL, Temp, "Application Error", MB_ICONSTOP); LocalFree(lpMsgBuf);delete[] Temp;return true;}bool openport(char *portname)//打开串口{hComm = CreateFile(portname, //串口号“com1”“com2” 调用方法:bool open; open=openport("com2");GENERIC_READ | GENERIC_WRITE, //允许读写0, //通讯设备必须以独占方式打开0, //无安全属性OPEN_EXISTING, //通讯设备已存在FILE_FLAG_OVERLAPPED, //异步I/O0); //通讯设备不能用模板打开if (hComm == INVALID_HANDLE_VALUE) //如果被占用或是没有打开时返回的是这个错误代码CloseHandle(hComm);return FALSE;}elsereturn true;}bool setupdcb(int rate_arg)//设置port的属性{DCB dcb;int rate= rate_arg;memset(&dcb,0,sizeof(dcb));if(!GetCommState(hComm,&dcb))//获取当前DCB配置return FALSE;// set DCB to configure the serial portdcb.DCBlength = sizeof(dcb);dcb.BaudRate = rate;dcb.Parity = NOPARITY; //奇偶校验值0~4分别对应无校验、奇校验、偶校验、校验置位、校验清零dcb.fParity = 0; //为1的话激活奇偶校验检查dcb.StopBits = ONESTOPBIT;//停止位个数,0~2分别对应1位、1.5位、2位停止位dcb.ByteSize = 8; //数据位数dcb.fOutxCtsFlow = 0;dcb.fOutxDsrFlow = 0;dcb.fDtrControl = DTR_CONTROL_DISABLE; dcb.fDsrSensitivity = 0;dcb.fRtsControl = RTS_CONTROL_DISABLE; dcb.fOutX = 0;dcb.fInX = 0;dcb.fErrorChar = 0;dcb.fBinary = 1;dcb.fNull = 0;dcb.fAbortOnError = 0;dcb.wReserved = 0;dcb.XonLim = 2;dcb.XoffLim = 4;dcb.XonChar = 0x13;dcb.XoffChar = 0x19;dcb.EvtChar = 0;// set DCBif(!SetCommState(hComm,&dcb))return false;elsereturn true;}/*串口读取相关时间设置*/bool setuptimeout(DWORD ReadInterval,DWORD ReadTotalMultiplier,DWORD ReadTotalconstant,DWORD WriteTotalMultiplier,DWORD WriteTotalconstant){COMMTIMEOUTS timeouts;timeouts.ReadIntervalTimeout=ReadInterval; //读取两个字节间隔最大值mS如超过立即返回不再读取timeouts.ReadTotalTimeoutConstant=ReadTotalconstant; //如果同下面一个都为0 则无论是否读到数据都返回// 可以毫秒为单位指定一个乘数,该乘数用来计算读操作的总限时时间timeouts.ReadTotalTimeoutMultiplier=ReadTotalMultiplier; // 以毫秒为单位指定一个常数,用于计算读操作的总限时时间0表示不限时timeouts.WriteTotalTimeoutConstant=WriteTotalconstant;// 写操作延时同上timeouts.WriteTotalTimeoutMultiplier=WriteTotalMultiplier;if(!SetCommTimeouts(hComm, &timeouts))return false;elsereturn true;}int Clearn() //清除buff中的内容并返回buff中现有数据量的大小并读取错误原因{DWORD dwError = 0;DWORD BytesRead = 0;ClearCommError(hComm, &dwError, &comstat);return comstat.cbInQue; //返回buff中数据量}/*串口数据接收读取函数*/void ReceiveChar(){BOOL bRead = TRUE;BOOL bResult = TRUE;DWORD dwError = 0;DWORD BytesRead = 0;char i=0,n;char RXBuff;j=0;while (i-n){n=i;Sleep(10);bResult = ClearCommError(hComm, &dwError, &comstat); i=(char)comstat.cbInQue;for (;i>0;i--){if (bRead)bResult = ReadFile(hComm, // Handle to COMM port &RXBuff, // RX Buffer Pointer1, // Read one byte&BytesRead, // Stores number of bytes read&m_ov); // pointer to the m_ov structure// printf("%c",RXBuff);cRecs[j++]=(char)RXBuff;if (!bResult){switch (dwError = GetLastError()){case ERROR_IO_PENDING:{bRead = FALSE;break;}default: break;}elsebRead = TRUE; // close if (bRead)if (!bRead){bRead = TRUE;bResult = GetOverlappedResult(hComm, // Handle to COMM port&m_ov, // Overlapped structure&BytesRead, // Stores number of bytes readTRUE); // Wait flag}}}bool WriteChar(char* m_szWriteBuffer,DWORD m_nToSend) //写字符的函数{BOOL bWrite = TRUE;BOOL bResult = TRUE;DWORD BytesSent = 0;HANDLE m_hWriteEvent;ResetEvent(m_hWriteEvent);if (bWrite){m_ov.Offset = 0;m_ov.OffsetHigh = 0;// Clear bufferbResult = WriteFile(hComm, // Handle to COMM Portm_szWriteBuffer, // Pointer to message buffer in calling finction m_nToSend, // Length of message to send&BytesSent, // Where to store the number of bytes sent&m_ov ); // Overlapped structureif (!bResult){DWORD dwError = GetLastError();switch (dwError){case ERROR_IO_PENDING:{// continue to GetOverlappedResults()BytesSent = 0;bWrite = FALSE;break;}default:// all other error codesbreak;}}} // end if(bWrite)if (!bWrite){bWrite = TRUE;bResult = GetOverlappedResult(hComm, // Handle to COMM port &m_ov, // Overlapped structure&BytesSent, // Stores number of bytes sentTRUE); // Wait flag// deal with the error codeif (!bResult){printf("GetOverlappedResults() in WriteFile()");}} // end if (!bWrite)// Verify that the data size send equals what we tried to send if (BytesSent != m_nToSend){printf("WARNING: WriteFile() error.. Bytes Sent: %d; Message Length: %d\n", BytesSent, strlen((char*)m_szWriteBuffer));}return true;}/*window时间函数回调*/void CALLBACK TimerProc (HWND hwnd, UINT message, UINT iTimerID, DWORD dwTime){SYSTEMTIME time; //定义机构体变量timeGetLocalTime(&time); //取系统时间以指针方式TCHAR strTime[256]; //程序只有一个作用wsprintf(strTime,"%04d-%02d-%02d %02d:%02d:%02d",time.wYear, //就是读取系统时间time.wMonth,time.wDay,time.wHour,time.wMinute,time.wSecond);//然后写进strTimeSetDlgItemText(hwnd,IDC_TIME,strTime); //这个字符串}void Main_OnCommand(HWND hwnd, int id, HWND hwndCtl, UINT codeNotify){switch(id){case IDC_SEND:{GetDlgItemText (hwnd,IDC_EDIT2,cSends,sizeof(cSends)); unsigned n=sizeof(cSends); //n是通知串口将发送字节的长度char send[100];wsprintf (send,"%s",cSends);WriteChar(send,n-1);SetCommMask(hComm, EV_RXCHAR); //监视串口是否接收有数据ReceiveChar(); //读取串口sbuff中数据cRecs[j]='\0'; //将cRecs转为字符串SetDlgItemText(hwnd,IDC_EDIT1,cRecs);} break;/*case IDC_RECEIVE: //暂时未用采用直接显示的方式{}break;*/case IDC_CHECK:{int ctr;HWND hwndCombo1=GetDlgItem(hwnd,IDC_COMBO1);ctr = ComboBox_GetCurSel(hwndCombo1);switch (ctr){case 0:cCom="com1";break;case 1:cCom="com2";break;case 2:cCom="com3";break;case 3:cCom="com4";break;case 4:cCom="com5";break;default: cCom="com1";break;}if (openport(cCom)){ SetDlgItemText(hwnd,IDC_EDIT3,"OK !");MessageBox(hwnd,"串口打开成功!","",0); }elseSetDlgItemText(hwnd,IDC_EDIT3,"FAIL");if(setupdcb(9600)&&setuptimeout(1024,0,0,20,1000)) //初始化串口属性波特率9600SetDlgItemText(hwnd,IDC_EDIT4,"串口属性设置成功");elseSetDlgItemText(hwnd,IDC_EDIT4,"串口初始化失败!"); PurgeComm(hComm, PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT);}default:break;}}void Main_OnClose(HWND hwnd) {EndDialog(hwnd, 0);}。