基于-单片机的过零检测控制系统的设计
单片机控制系统设计

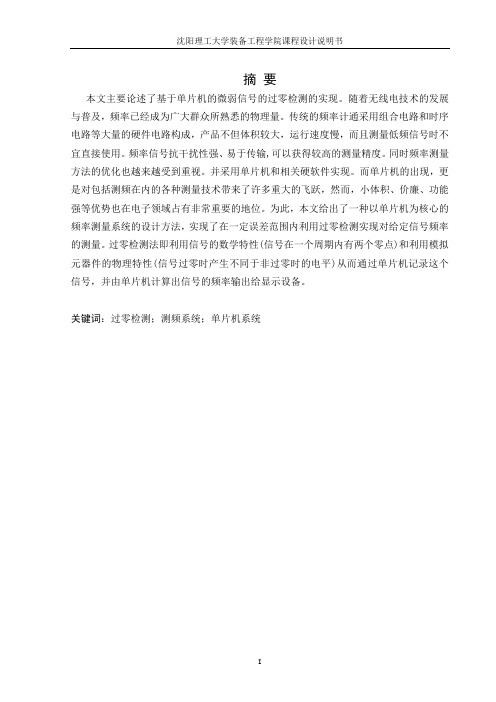
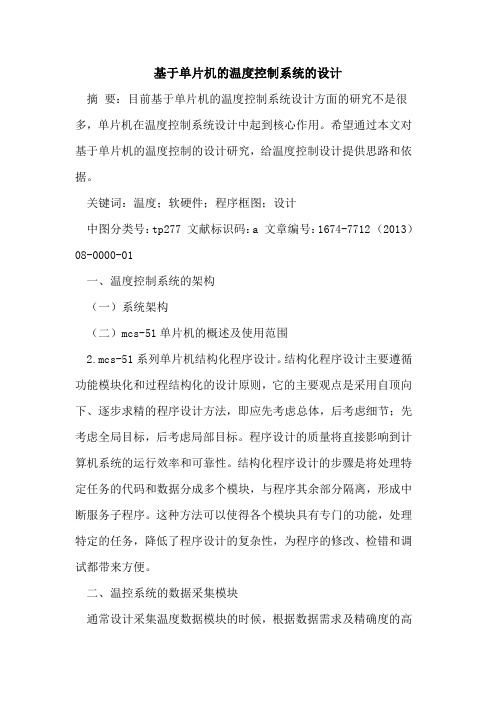
2.直接数字控制 直接数字控制(Direct Digital Control)简称为DDC。它是用一台计
算机对多个被控参数进行巡回检测,检测结果与给定值进行比较,再按照 一定的调节规律(例如PID)进行计算,然后发布控制命令,由执行机构 对生产过程进行调节。
3.计算机监督控制 计算机监督控制(Supervisory Computer Control)简称为SCC。在直接
在多级控制系统中,还可在监督控制的上面增设一级生管理级,一方面对生 产过程进行调度和管理,另一方面根据控制要求指挥监督控制级的工作。
由于与中型机、大型机相比,微型计算机的功能终归有限。因此,目前主要 用于数字程序控制、直接数字控制、监督控制、分级控制中的前级控制及工业 现场的巡回检测。
5.新型控制系统 近年来,单片机的功能在不断地增强,因此已逐步形成单片机控制系统。由
外
计
围
算
设
机
备
计算机系统
信号/数据采集及输入通道
输
传
入
感
通
器
工
道
业
控
输
执
制
出
行对通机来自象道构
输出通道及执行机构
图8.20 计算机控制系统框图
1.程序控制 程序控制(Programmed Automatic Control)也称为数字程序控制
基于过零检测的继电器触点保护电路设计

科技与创新┃Science and Technology&Innovation ·112·2017年第24期文章编号:2095-6835(2017)24-0112-02基于过零检测的继电器触点保护电路设计胡云生,郝佳琦,谢雅丽(西南石油大学理学院,四川成都610500)摘要:设计了一种新型的电磁继电器触点保护系统,它可以明显减弱电磁继电器在实际使用过程中产生的打火、拉弧等现象。
利用光电耦合器实现的交流电压过零检测电路,结合单片机实现了触点在交流电压零点附近吸合,降低了打火强度;利用霍尔电流传感器,实现了无相差交流电流检测,并结合单片机实现了触点在交流电流零点附近断开,有效减弱了拉弧现象。
同时,单片机通过监测并记录继电器动作响应时间,自动修正控制信号的提前量,有效避免由动作时间偏移引起的控制误差。
关键词:触点保护;过零检测;打火;拉弧中图分类号:TM58文献标识码:A DOI:10.15913/ki.kjycx.2017.24.1121背景介绍电磁继电器在电路中发挥着电压隔离、安全保护、自动开关等重要作用。
在高压、大功率控制系统中,继电器的闭合、断开都会引发打火、拉弧等现象,严重时还会烧焦继电器触点,使控制系统失效或粘连,造成严重后果。
我国继电器保护技术已经进入了微机保护时代,电力系统对微机保护的要求也在不断提高,做好继电器触点保护,提高其可靠性,可以延长继电器的使用寿命。
继电器与微处理器组合使用可以实现精准控制,实现高智能化。
微机保护方法相对小型机电系统而言,成本太高并不适用。
本文旨在低成本投入下完成适合小型机电系统的继电器保护电路设计,降低故障发生率,延长继电器的使用寿命。
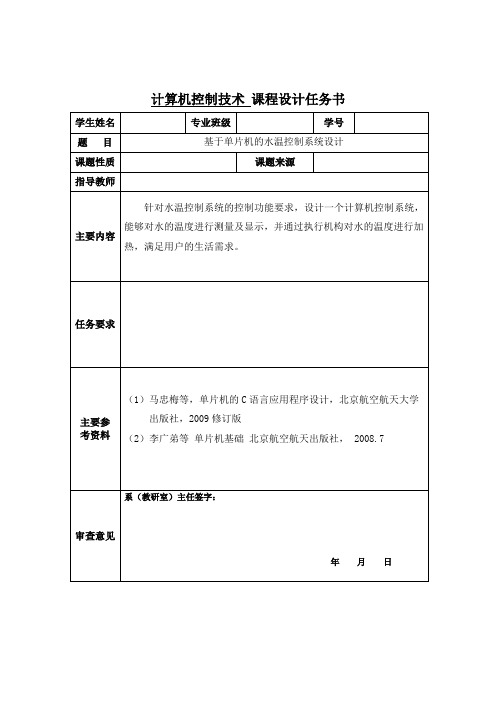
2触点保护电路设计2.1基于过零检测的触点保护原理在实际工作中,可利用光耦传感器将交流电压信号转化为TTL信号,如图1所示。
图1中正弦波为交流电压信号,当电压大于0时,TTL输出高电平。
可见,TTL信号上升沿即为电压相位零点。
基于单片机的电除尘控制系统的设计

辽宁科技大学信息技术院本科生毕业设计(论文) 第I页
基于单片机的电除尘控制系统的设计
摘 要
随着经济的飞速发展,工业化和现代化进程的不断加快,工业粉尘排量也日益增加,大气污染也变得越来越严重。随着人类环保意识的不断增强,除尘也越来越为人们所重视。电除尘控制器器以除尘效率高、能耗低、占地面积小、可处理大烟气量气体等特点广泛应用于电力、冶金、建材、石油等行业。本文正是在这种背景下设计了以单片机为核心的电除尘控制系统。
基于80C552单片机的温度控制系统
OCCUPATION1192012 12探索E XPLORATION基于80C552单片机的温度控制系统黎 媛摘 要:本文介绍一种采用80C552构成的单片机温度控制系统,分析了系统构成及其工作原理。
关键词:80C552单片机 温度控制系统温度是工业生产中最基本的工艺参数之一。
任何物理变化和化学变化的过程都和温度密切相关,因此,在生产过程中,如在冶金工业、化工生产、电力工程、机械制造和食品加工等许多领域中,常需要对温度进行检测和控制。
对于不同场所、不同工艺、所需温度高低范围不同、精度不同,则采用的测温元件、测温方法以及对温度的控制方法也将不同;产品工艺不同、控制温度的精度不同、实效不同,则对数据采集的精度和控制算法也不同,因而,现阶段对温度的测控方法多种多样。
采用单片机来对温度进行控制,不仅具有控制方便、简单和灵活性大等优点,而且可以大幅度提高被控制温度的技术指标,从而能够大大提高产品的质量和数量。
本文介绍了一种采用80C552构成的单片机温度控制系统。
本系统由热电偶、变送器、80C552单片机、加热控制电路和过零检测电路组成。
热电偶温度传感器把检测到的温度信号变成微弱的电压信号,该微弱的电压信号被送入变送器后变成0~5V的电压信号,通过P5.0输入80C552单片机。
单片机通过T0中断控制P1.3产生高电平,此高电平在得到过零同步信号时就输出控制信号控制晶闸管的导通来对电阻丝加热,当现场的温度超过了1010℃,T1中断控制P1.3产生低电平,即发出报警并停止加热。
本温度控制系统能将温度控制在1000℃左右(990~1010℃),并显示温度。
系统可解决温度控制中的以下问题:温度采样、数字滤波、越限警报和处理、PID计算、温度标度转换、温度显示等。
温度检测元件与变送器的类型选择和被控温度及精度等级有关。
镍铬/镍铝热电偶适用于0~1200℃ 的温度检测范围,相应输出电压为0~41.32mV温度变送器由毫伏变送器和电流/电压变送器组成:毫伏变送器用于把热电偶输出的0~41.32mV变换成0~10mA范围内的电流;电流/电压变送器用于把毫伏变送器输出的0~10mA 电流变换成0~6V范围内的电压。
基于单片机的风扇智能控制器硬件设计
1 控 制器 整体设计 方案
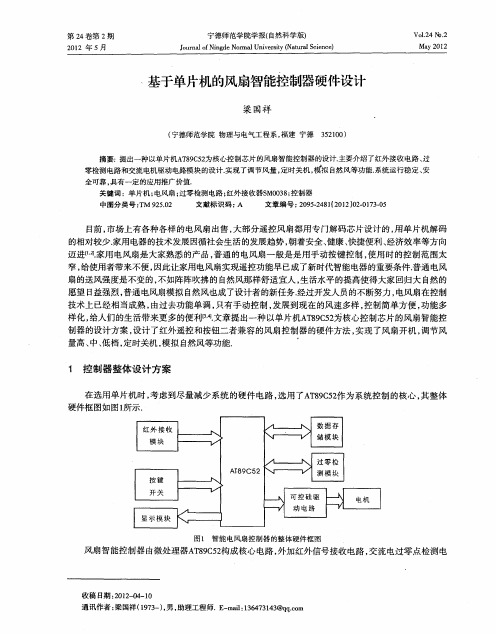
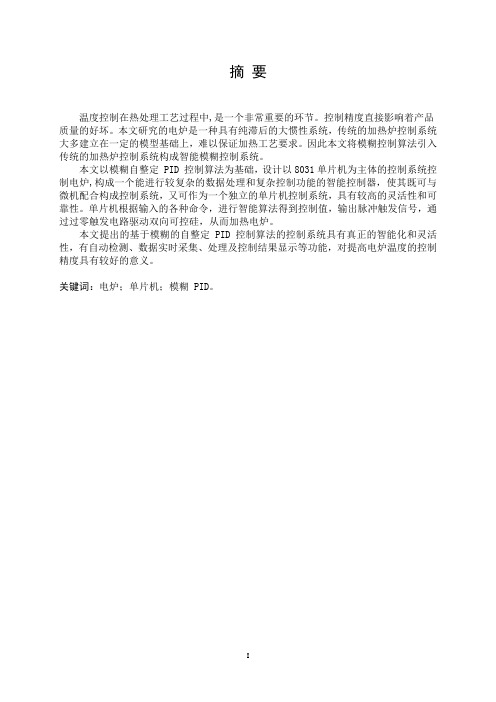
在选用单片机时 , 考虑到尽量减少系统 的硬件 电路 , 选用 TA 8 C 2 T 9 5 作为系统控制 的核心 , 其整体 硬件 框 图如 图1 所示 .
红 \
广 —]/I 储模块
过 零 检
L
I
持 静 l 卜 、
A 8 C5 T9 2 \
红 外线 转换 为 电信号 , 信 号经选 频放 大 、 该 解调 后 由 1 输 出与 ' L l 容 的 电信 号 , 信 号可 以直接 脚 I  ̄ z - T 兼 该
I测 模 块 I
可 控 硅 驱 由 n 儿
一 ~
l
开 关
I
l
、
显模 l 示块< =
y
/ 动 电 路
图1 智 能电风扇控制器 的整体硬件框图
风扇智能控制器由微处理器A 8C 2 T 9 5构成核心电路 , 外加红外信号接收电路 , 交流 电过零点检测 电
合泰单片机交流电过零检测方案
工作原理
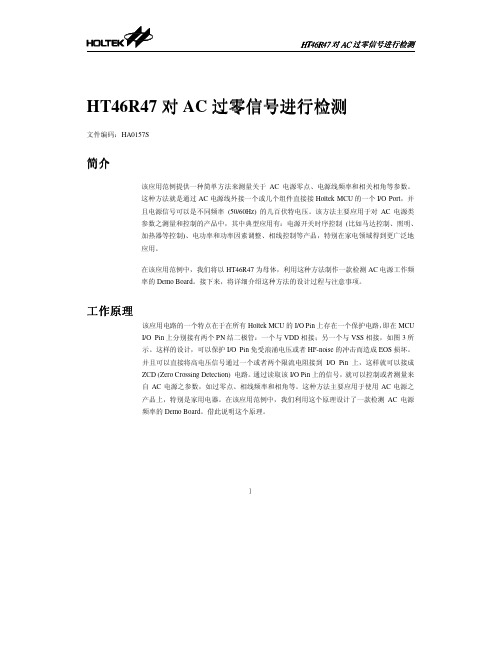
该应用电路的一个特点在于在所有 Holtek MCU 的 I/O Pin 上存在一个保护电路, 即在 MCU I/O Pin 上分别接有两个 PN 结二极管:一个与 VDD 相接;另一个与 VSS 相接,如图 3 所 示。这样的设计,可以保护 I/O Pin 免受浪涌电压或者 HF-noise 的冲击而造成 EOS 损坏。 并且可以直接将高电压信号通过一个或者两个限流电阻接到 I/O Pin 上,这样就可以接成 ZCD (Zero Crossing Detection) 电路。 通过读取该 I/O Pin 上的信号, 就可以控制或者测量来 自 AC 电源之参数,如过零点、相线频率和相角等。这种方法主要应用于使用 AC 电源之 产品上,特别是家用电器。在该应用范例中,我们利用这个原理设计了一款检测 AC 电源 频率的 Demo Board。借此说明这个原理。
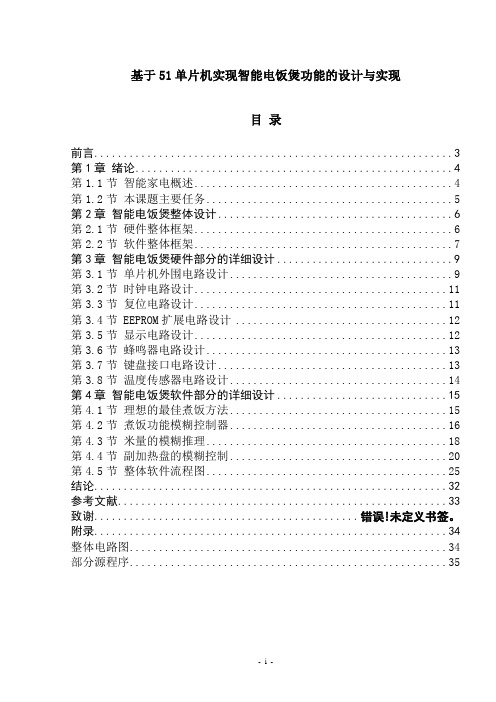
I out =
230 − 5.1 = 34.21mA 1 2 + 51 + 51 −6 2π *50*1*10
如果输入电压 110V AC/60Hz,那么最大输出电流 Iout 可以计算得:
I out =
110 − 5.1 = 19.03mA 1 2 + 51 + 51 −6 2π *60*1*10
C7 10 4
R8 330R R7 330R LED2
4M H Z Y1
+5V RST
R6 10K
LED1
H T 4 6R 47
C8 10 4
图1
电源电路
供给 HT46R47 的电源是通过阻容降压来获得的,其具体电路由 R7、R3、C5、D1、D6、 C1 和 C4 构成,如图 2 所示。在该范例中,所设计之总输入电流一般来说,在一定的工作 电源下必须满足最大输出电流。最大输出电流可以通过如下公式计算出:
基于单片机的温度控制系统课设报告
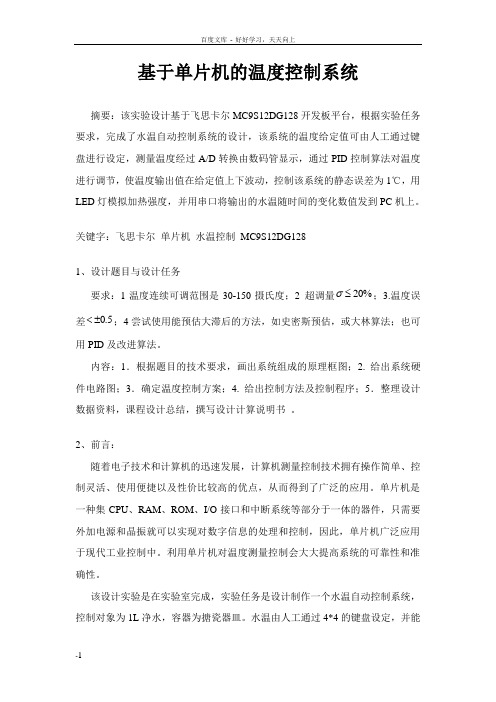
基于单片机的温度控制系统摘要:该实验设计基于飞思卡尔MC9S12DG128开发板平台,根据实验任务要求,完成了水温自动控制系统的设计,该系统的温度给定值可由人工通过键盘进行设定,测量温度经过A/D转换由数码管显示,通过PID控制算法对温度进行调节,使温度输出值在给定值上下波动,控制该系统的静态误差为1℃,用LED灯模拟加热强度,并用串口将输出的水温随时间的变化数值发到PC机上。
关键字:飞思卡尔单片机水温控制MC9S12DG1281、设计题目与设计任务σ≤;3.温度误要求:1温度连续可调范围是30-150摄氏度;2 超调量20%<±;4尝试使用能预估大滞后的方法,如史密斯预估,或大林算法;也可差0.5用PID及改进算法。
内容:1.根据题目的技术要求,画出系统组成的原理框图;2. 给出系统硬件电路图;3.确定温度控制方案;4. 给出控制方法及控制程序;5.整理设计数据资料,课程设计总结,撰写设计计算说明书。
2、前言:随着电子技术和计算机的迅速发展,计算机测量控制技术拥有操作简单、控制灵活、使用便捷以及性价比较高的优点,从而得到了广泛的应用。
单片机是一种集CPU、RAM、ROM、I/O接口和中断系统等部分于一体的器件,只需要外加电源和晶振就可以实现对数字信息的处理和控制,因此,单片机广泛应用于现代工业控制中。
利用单片机对温度测量控制会大大提高系统的可靠性和准确性。
该设计实验是在实验室完成,实验任务是设计制作一个水温自动控制系统,控制对象为1L净水,容器为搪瓷器皿。
水温由人工通过4*4的键盘设定,并能在环境温度改变时实现对水温的自动控制,采用PWM技术控制电阻丝的加热,加热强度由8个LED小灯模拟,以保持设定的温度基本不变,测量温度经过A/D 转换在4位数码管上显示(保留一位小数),并将温度每秒钟向计算机发送一次。
一、系统设计的功能该系统的闭环控制系统框图如图所示。
图水温控制系统结构框图单片机对温度的测量控制是基于传感器、A/D转换器以及扩展接口和执行机构来进行的。
基于单片机的温度控制系统设计

基于51单片机的水温自动控制系统沈统摘要:在现代化的工业生产中,温度是常用的测量机被控参数。
本水温控制系统采用AT89C51为核心控制器件,实现对水温在30℃到96℃的自动控制。
由精密摄氏温度传感器LM35D构成前置信号采集和调理电路,过零检测双向可控硅输出光电耦合器MOC3041构成后向控制电路,由74LS164和LED数码管构成两位静态显示用于显示实时温度值。
关键词:89C51单片机;LM35D温度传感器;ADC0809;MOC3041光电藕耦合器;水温自动控制0 引言在现代的各种工业生产中 ,很多地方都需要用到温度控制系统。
而智能化的控制系统成为一种发展的趋势。
本文所阐述的就是一种基于89C51单片机的温度控制系统。
本温控系统可应用于温度范围30℃到96℃。
1 设计任务、要求和技术指标1.1任务设计并制作一水温自动控制系统,可以在一定范围(30℃到96℃)内自动调节温度,使水温保持在一定的范围(30℃到96℃)内。
1.2要求(1)利用模拟温度传感器检测温度,要求检测电路尽可能简单。
(2)当液位低于某一值时,停止加热。
(3)用AD转换器把采集到的模拟温度值送入单片机。
(4)无竞争-冒险,无抖动。
1.3技术指标(1)温度显示误差不超过1℃。
(2)温度显示范围为0℃—99℃。
(3)程序部分用PID算法实现温度自动控制。
(4)检测信号为电压信号。
2 方案分析与论证2.1主控系统分析与论证根据设计要求和所学的专业知识,采用AT89C51为本系统的核心控制器件。
AT89C51是一种带4K字节闪存可编程可擦除只读存储器的低电压,高性能CMOS 8位微处理器。
其引脚图如图1所示。
2.2显示系统分析与论证显示模块主要用于显示时间,由于显示范围为0~99℃,因此可采用两个共阴的数码管作为显示元件。
在显示驱动电路中拟订了两种设计方案:方案一:采用静态显示的方案采用三片移位寄存器74LS164作为显示电路,其优点在于占用主控系统的I/O口少,编程简单且静态显示的内容无闪烁,但电路消耗的电流较大。
基于单片机的弱信号过零检测测频系统仿真
摘要本文主要论述了基于单片机的微弱信号的过零检测的实现。
随着无线电技术的发展与普及,频率已经成为广大群众所熟悉的物理量。
传统的频率计通采用组合电路和时序电路等大量的硬件电路构成,产品不但体积较大,运行速度慢,而且测量低频信号时不宜直接使用。
频率信号抗干扰性强、易于传输,可以获得较高的测量精度。
同时频率测量方法的优化也越来越受到重视。
并采用单片机和相关硬软件实现。
而单片机的出现,更是对包括测频在内的各种测量技术带来了许多重大的飞跃,然而,小体积、价廉、功能强等优势也在电子领域占有非常重要的地位。
为此,本文给出了一种以单片机为核心的频率测量系统的设计方法,实现了在一定误差范围内利用过零检测实现对给定信号频率的测量。
过零检测法即利用信号的数学特性(信号在一个周期内有两个零点)和利用模拟元器件的物理特性(信号过零时产生不同于非过零时的电平)从而通过单片机记录这个信号,并由单片机计算出信号的频率输出给显示设备。
关键词:过零检测;测频系统;单片机系统目录1 绪论 (1)2 设计任务 (2)2.1 课程设计的目的及意义 (2)2.2 课程设计任务与要求 (2)2.3 实验器材 (2)2.4 课程设计技术指标 (2)3 低频弱信号测频系统工作原理 (3)3.1 低频弱信号测频系统概述 (3)3.2低频弱信号测频系统原理 (3)3.2.1 原理基本构造图 (3)3.2.2 电路仿真原理图 (3)3.3 三极管放大原理 (4)3.4 三极管电子电子开关 (5)3.5 改良型电子开关 (6)4 低频弱信号测频系统参数计算和器件选择 (8)4.1 参数计算 (8)4.2 元器件清单 (8)4.3单片机最小系统 (9)4.3.1 晶振电路 (9)4.3.2AT89C51单片机复位电路 (10)5 低频弱信号测频系统源程序 (11)5.1 程序流程图设计 (11)5.2 源程序设计 (12)5.2.1 程序总体分析 (12)5.2.2 TCON寄存器初值设定 (12)5.2.3 TMOD寄存器初值设定 (12)5.2.4 IE寄存器初值设定 (13)5.2.5程序源代码 (14)6低频弱信号测频系统调试及测试结果与分析 (17)6.1 实验调试 (17)6.2 实验结果 (17)总结 (18)致谢 (19)参考文献 (20)1 绪论微弱信号(无噪声)的单片机测频系统分为三部分。
基于单片机的水温控制系统设计
计算机控制技术课程设计任务书1.1 课题背景当今社会大部分人在使用热水器时,基本上都是采用的快热式的。
这是因为它给人们带来了极大的方便,人们不再为热水器耗电量大而发愁,所以快热式电热水器走进千家万户应经成为必然的。
我国也在不断大力提倡家庭使用快热式电热水器,这样可以为国家节省很多电能。
而快热式电热水器克服了上述缺点,它有很多优点,如:安全,干净环保;即开即热,3-5秒出热水无须等候,热水使用时间不受限制,想用多久就用多久;用多少烧多少,省电省水,没有损耗;体积小不占空间,可以隐藏在厨柜内,安装方便,特别适合新装修的房子,款式多样,美观实用,也是职工福利和客户礼品的绝佳选择。
特别方便于洗涤,和洗漱,是为现代家居厨房洗涤、卫生间洗漱专业设计生产的快速电热水器,结合了燃气热水器和传统储水式电热水器优点。
1.3 系统功能快热式热水器的设计要求:(1)必须做到隋开随用,所以这就要求加热功率很大,以至于减少加热时间,所以温度检测元件的快速性就显得很重要。
(2)要做到安全可靠,这就要求控制电路要准确及时,防止热水器烧干而引发火灾或出现爆炸危险危及人身安全。
这里之所以设计快热式家用电热水器一是兴趣所致,二是正是看到了它的未来,即将来人们将越来越多的使用它。
2 总体方案设计对于快热式家用电热水器来说,硬件系统是它的最基本的框架,是系统的所有功能的丛础。
硬件的选择和所选硬件的性能对系统的功能实现以及系统的精度都有直接的影响,系统的设计成功与否很大程度上取决于硬件系统的设汁。
本系统硬件方案论证包括单片机、温度检测传感器、加热控制驱动电路、电源电路、及键盘和显示电路的选择。
2.1单片机的选择方案一:我们知道8031芯片内部无ROM,需要外扩程序存储器,由此造成电路焊接的困难,况且使用8031还需要另外购买其他的芯片,如A/D转换及定时/计数器(PWM)等芯片,从而造成成本较高,不实用。
方案二:因为89C51芯片内部有ROM,且片内ROM全部采用Flash ROM,它能于3V的超低压工作,与MCS-51系列单片机完全兼容,由于89C51单片机成本低廉且工作可靠,采用12MH z的晶振,所以我们选择89C51作为系统微处理器。
基于单片机的模糊PID温度控制系统设计
摘要温度控制在热处理工艺过程中,是一个非常重要的环节。
控制精度直接影响着产品质量的好坏。
本文研究的电炉是一种具有纯滞后的大惯性系统,传统的加热炉控制系统大多建立在一定的模型基础上,难以保证加热工艺要求。
因此本文将模糊控制算法引入传统的加热炉控制系统构成智能模糊控制系统。
本文以模糊自整定 PID 控制算法为基础,设计以8031单片机为主体的控制系统控制电炉,构成一个能进行较复杂的数据处理和复杂控制功能的智能控制器,使其既可与微机配合构成控制系统,又可作为一个独立的单片机控制系统,具有较高的灵活性和可靠性。
单片机根据输入的各种命令,进行智能算法得到控制值,输出脉冲触发信号,通过过零触发电路驱动双向可控硅,从而加热电炉。
本文提出的基于模糊的自整定 PID 控制算法的控制系统具有真正的智能化和灵活性,有自动检测、数据实时采集、处理及控制结果显示等功能,对提高电炉温度的控制精度具有较好的意义。
关键词:电炉;单片机;模糊 PID。
AbstractTemperature in heat treatment craft is very important. Control precision effect directly the quality of the product. The electric stove is a kind pure great inertia system, and the traditional heat control system is based on some certain model, so is hard to satisfy the technological requirement.This paper will adopt fuzzy control algorithm to build a intelligent fuzzy control system.In this paper, we use fuzzy self-regulated PID algorithmt to design a electric stove control system depending on mainly 8031 chip and build a intelligent controller which can process complicated data and realize complicated control functiong, meanwhile is alao regarded as an independent SCM control system which has higher flexibility and dependability. The SCM accords to all kinds input orders to carry out intelligent algorithm in order to get control value, then to feed out the pulse signal to trigger circuit and drive the two-way silicon in order to heat the stove.The control system based fuzzy self-regulated PID algorithm has real intelligence and flexibility. The functions include automatic detection, real-time data gather and precess and displaying the control output and so on, which do well in improving the control precision. Keyword:Electric stove;SCM;Fuzzy PID.目录第1章绪论 (1)1.1 引言 (1)1.2 控制器发展现状 (1)1.2.1 PID 控制器的发展现状 (1)1.2.2 模糊 PID 控制 (2)1.2.3 模糊自整定 PID 控制 (2)1.3 电炉采用模糊自整定 PID 控制的可行性 (2)第2章模糊自整定 PID 控制器的设计 (4)2.1 模糊推理机的设计 (4)2.1.1 模糊推理机的结构 (4)2.1.2 模糊推理机的设计 (4)2.1.2.1 精确量的模糊化 (5)2.1.2.2 建立模糊控制规则和模糊关系 (5)2.1.2.3 输出信息的模糊决策 (6)2.2 模糊自整定 PID 控制器 (6)2.2.1 PID 参数对 PID 控制性能的影响 (6)2.2.2 模糊自整定 PID 控制器 (7)2.3 模糊自整定 PID 控制器性能的研究 (8)2.3.1 Matlab 仿真结构图 (8)2.3.2 惯性时间常数的影响 (9)2.4 仿真结果分析 (10)第3章系统硬件和电路设计 (11)3.1引言 (11)3.2 系统的总体结构 (11)3.3 温度检测电路 (12)3.3.1 温度传感器 (12)3.3.2 测量放大器的组成 (12)3.3.3 热电偶冷端温度补偿方法 (13)3.4 多路开关的选择 (13)3.5 A/D转换器的选择及连接 (14)3.6 单片机系统的扩展 (15)3.6.1 系统扩展概述 (15)3.6.2 常用扩展器件简介 (16)3.7 存储器的扩展 (17)3.7.1 程序存储器的扩展 (17)3.7.1.1只读存储器简介 (17)3.7.1.2 EPROM2764简介 (17)3.7.2 数据存储器的扩展 (18)3.7.2.1数据存储器概述 (18)3.7.2.2静态RAM6264简介 (19)3.7.2.3数据存储器扩展举例 (19)3.8 单片机I/O口的扩展(8155扩展芯片) (20)3.8.1 8155的结构和引脚 (20)3.8.2 8155的控制字的及其工作方式 (21)3.8.3 8155与8031的连接 (22)3.9 看门狗、报警、复位和时钟电路的设计 (23)3.9.1看门狗电路的设计 (23)3.9.2报警电路的设计 (23)3.9.3复位电路的设计 (24)3.9.4 时钟电路的设计 (25)3.10 键盘与显示电路的设计 (25)3.10.1 LED数码显示器的接口电路 (25)3.10.2键盘接口电路 (26)3.11 DAC7521数模转换接口 (27)3.12 隔离放大器的设计 (28)3.13 可控硅调功控温 (29)3.13.1过零触发调功器的组成 (29)3.13.2主要电路介绍 (30)3.14 单片机开关稳压电源设计 (31)第4章系统软件设计 (32)4.1 主要程序的框图 (32)4.1.1主程序框图 (32)4.1.2键盘中断服务子程序 (33)4.1.3恒温及升温测控子程序 (34)4.1.4降温测控子程序 (35)4.2 模糊自整定 PID 控制算法 (36)致谢 (39)参考文献 (40)附录 (42)第1章 绪论1.1 引言电炉是热处理生产中应用最广的加热设备,通过布置在炉内的电热元件将电能转化为热能,借助辐射与对流的传热方式加热工件。
基于51单片机实现智能电饭煲功能的设计与实现毕业论文
目录前言 (3)第1章绪论 (4)第1.1节智能家电概述 (4)第1.2节本课题主要任务 (5)第2章智能电饭煲整体设计 (6)第2.1节硬件整体框架 (6)第2.2节软件整体框架 (7)第3章智能电饭煲硬件部分的详细设计 (9)第3.1节单片机外围电路设计 (9)第3.2节时钟电路设计 (11)第3.3节复位电路设计 (11)第3.4节 EEPROM扩展电路设计 (12)第3.5节显示电路设计 (12)第3.6节蜂鸣器电路设计 (13)第3.7节键盘接口电路设计 (13)第3.8节温度传感器电路设计 (14)第4章智能电饭煲软件部分的详细设计 (15)第4.1节理想的最佳煮饭方法 (15)第4.2节煮饭功能模糊控制器 (16)第4.3节米量的模糊推理 (18)第4.4节副加热盘的模糊控制 (20)第4.5节整体软件流程图 (25)结论 (32)参考文献 (33)致谢............................................. 错误!未定义书签。
附录 (34)整体电路图 (34)部分源程序 (35)【摘要】:电饭煲是人们日常生活中最普遍的家用电器,随着人们生活水平的提到,电饭煲也日趋智能化,本课题主要基于家电智能化的背景下,根据智能电饭煲的发展和现状,探讨智能电饭煲如何实现智能化的煮饭、预约、再加热等功能。
本文参考的是美的电饭煲,在本设计中实现了其控制面板上的大部分功能,在讨论炊煮时温度控制方面,本文主要采用模糊控制技术实现其加热温度的控制。
在硬件设计上,论文设计了以INTEL公司的8052单片机为核心的控制电路,包括复位电路、振荡电路、LCD显示电路、按键扫描电路、数字温度传感器电路、EEPROM扩展电路和时钟电路。
在软件设计上,首先根据各个功能的典型最佳炊煮温度曲线编写出调试(测试)程序,通过调试程序找出针对产品的对应各个功能的最佳炊煮温度曲线。
针对煮饭功能,提出了易于实现并且有效的米量与实时温度控制的模糊控制理论,制定了不同的煮饭功能对应的炊煮模糊控制方案。
基于MCU的交流功率调节控制器的设计

基于MCU的交流功率调节控制器的设计李艳;张静;任普【摘要】目前,国内工业应用中的传统晶闸管调节器控制精度低,通讯功能差,不能满足现代工业生产的要求.而单片机(MCU)以其功耗低,工作稳定,体积小,便于携带等优点,广泛应用于工业领域中.本设计采用理论加实验的方法,设计了一款以STC89C52单片机为核心控制器,晶闸管为主要变流器件的交流调功控制器.运用过零检测触发方式,通过单片机产生可调的PWM波来控制双向晶闸管的通断,进而调节负载上所消耗的平均功率,得到交流调功的目的.【期刊名称】《榆林学院学报》【年(卷),期】2019(029)002【总页数】4页(P44-47)【关键词】交流调功;双向晶闸管;MCU;移相控制;过零触发【作者】李艳;张静;任普【作者单位】榆林学院能源工程学院,陕西榆林719000;河南驰诚电气股份有限公司,河南郑州450001;榆林学院能源工程学院,陕西榆林719000【正文语种】中文【中图分类】TP319电能在人们的日常生活中起着至关重要的作用。
从1835年开始,苏格兰科学家James Bomanlin在实验室发现了最早的电灯。
1913年,美国芝加哥开发出世界上第一台家用冰箱。
使得对电能的要求也越来越高。
然而,使用大量非线性电气设备导致较差的电能质量。
而且,使用各种各样的数字和智能家电需要高质量的电源,如何转换出高质量的电能以供不同负载的使用就显得尤为重要[1-5]。
目前,以晶闸管为代表的半控型电力电子器件在工业生产技术上主要实现交流功率调节的目的。
这种功率调节方式是在负载电路中串联两个反并联的单相晶闸管来实现的。
以交流电源作为控制单元的周期,有两种触发模式,过零触发和相移触发。
在相移电压调节模式中,由晶闸管的栅极产生的脉冲引起的工频交流电流每半个周期连续调节,这相当于负载电压的连续调节。
过零触发分为固定周期和可变周期同步过零调整[6-8]。
当MCU发出控制脉冲时,晶闸管在交流电压过零时导通和关断。
基于单片机的温度控制系统的设计
基于单片机的温度控制系统的设计摘要:目前基于单片机的温度控制系统设计方面的研究不是很多,单片机在温度控制系统设计中起到核心作用。
希望通过本文对基于单片机的温度控制的设计研究,给温度控制设计提供思路和依据。
关键词:温度;软硬件;程序框图;设计中图分类号:tp277 文献标识码:a 文章编号:1674-7712 (2013)08-0000-01一、温度控制系统的架构(一)系统架构(二)mcs-51单片机的概述及使用范围2.mcs-51系列单片机结构化程序设计。
结构化程序设计主要遵循功能模块化和过程结构化的设计原则,它的主要观点是采用自顶向下、逐步求精的程序设计方法,即应先考虑总体,后考虑细节;先考虑全局目标,后考虑局部目标。
程序设计的质量将直接影响到计算机系统的运行效率和可靠性。
结构化程序设计的步骤是将处理特定任务的代码和数据分成多个模块,与程序其余部分隔离,形成中断服务子程序。
这种方法可以使得各个模块具有专门的功能,处理特定的任务,降低了程序设计的复杂性,为程序的修改、检错和调试都带来方便。
二、温控系统的数据采集模块通常设计采集温度数据模块的时候,根据数据需求及精确度的高低,有以下两种方式:(1)数据精确度不高的时候,设计基于msc-51单片机及adc0809的温度采集控制系统。
该系统利用单片机中空余的i/o接口,以中断的方式实现温度的实时采集与控制,充分利用cpu的资源空间,简化了测量电路以及程序调试的复杂过程。
(2)数据精确度较高低的时候,以热电偶、热电阻为检测元件的单片机温度控制系统电路,但是组成的温度测量电路复杂,软件调试繁琐。
三、温控系统的控制模块温控系统的控制模块在本次设计模块中占据重要比例。
在8031对温度的控制中,双向可控硅管起到主要作用。
我们在220v/50hz 市电回路中,将双向可控硅管和加热丝串接连接。
预先设定一个温度管控时间t,然后再规定的时间内,通过改变8031的接通时间,从而改变加热丝的功率,而最终实现对温度控制的功能。
基于单片机过零触发烧结炉温度控制系统的设计
【 文章编号 】 1 3 27( 0) — 08 0 0 —63 07 7 03 — 3 0 2 0
现时不少企业所用 的烧结 炉温度控制系统仍 沿用 上世纪
开关元件击穿损坏造成 的烧结炉温度失控 、 硅碳棒 由于某种原
8 0年代末期至 9 0年代 初期 生产的温度控 制仪 表 , 这些 温度 控 制仪表通常采用的控制方式是通 断控制方式 , 调压方式则采用 移相触发控制 方式 。通 断控制温度 方式缺 点是控制精度较差 , 其控 制的温度变化 范围往往过大 ; 移相触发控制方式调整电压 也存 在功率 因数低 下 、 电网的谐波污染大 等缺点 , 对 另外这 些
㈨ : : : , A
图1
、
/ …
采用移相触发方式 也可实现调功 , 但它会导致电压与电流
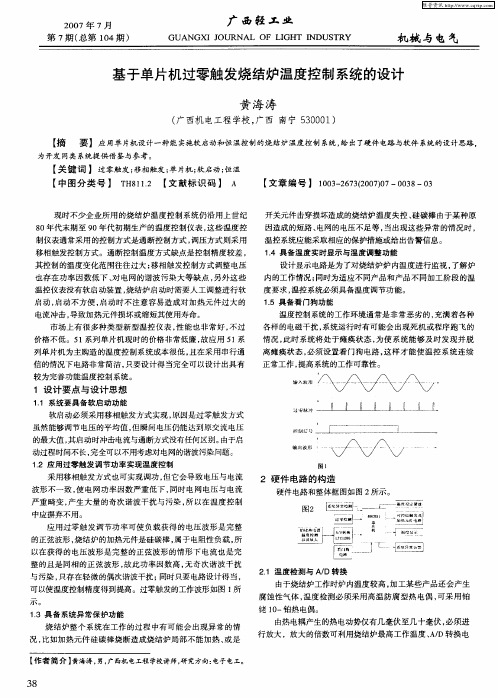
2 硬 件 电路 的构 造
硬件 电路和整体框 图如 图 2所示 。
波形不一致 , 电网功率因数严重低下 , 使 同时 电网电压与 电流
严重 畸变 , 产生大量 的奇次谐波干扰与污染 , 以在温度控制 所 中应摒弃不用 。 应用 过零 触发调节功率 可使负载获得 的 电压波形 是完整 的正弦波形 , 烧结炉 的加热元件是硅碳棒 , 于电阻性负 载, 属 所 以在获得 的电压波形是完整 的正弦波形 的情 形下电流也是 完 整的且是 同相 的正 弦波形 , 故此功率因数 高, 无奇 次谐波干 扰 与污染 , 只存在轻微 的偶次谐波干扰 ; 同时只要 电路设计得当 ,
维普资讯
20 0 7年 7月
广 西 轻 工 业
G A G IO R A FL H D SR U N X U N LO I TI U TY J G N 机 械 与 电 气
第 7 ( 期 总第 1 4 ) 0 期
基于单片机的过零检测控制系统的设计

基于单片机的过零检测控制系统的设计如下图所示为按上述思想设计的电压正向过零检测电路。
220V的交流电首先经过电阻分压,然后进行光电耦合,假设输入的是A相电压,则在A相电压由负半周向正半周转换时,图中三极管导通并工作在饱和状态,会产生一个下降沿脉冲送入ADμC812的INT0引脚使系统进入中断程序。
微机系统进入中断程序后,发出采样命令并从采样保持器读取无功电流值Iqm,这个无功电流即为A相的无功电流,经过1/4个周期电压达到最大值,此时对电压进行采样,得到UM,由UM=1。
414U可以得到电压有效值U。
过零检测及单片机调压首先用PWM(脉宽调制)方法用于可控硅控制是有条件的,即调制频率不能大于市电频率(50Hz),也就是周期不能小于20mS,否则就不能达到调制作用,调制频率超过市电频率时,可控硅即处于连续导通状态而不能达到调压目的。
只有调制频率低于市电频率才能起到调压目的,即限制市电的周波通过可控硅的数量而起到调压的目的。
因此用该种方法调制的电压周波数一定是小于50HZ,超过了人眼视觉暂留效应,此就是用于调光产生闪烁的原因。
该调压方法用在调功或对脉动电压不敏感的用途上尚可。
如果采用可控硅调压用在调光上,须采用移相的调制方法,可使光连续可调。
采用移相方法就需过零检测作为移相基点。
过零检测其实并不难,如果要求调压比不是很高采用简单的方法即可奏效;用一只三极管即可。
用单片机进行移相调压控制可以做得很精。
/********************************************************************************/#i nclude 〈pic.h〉__CONFIG (CPD&PROTECT&BOREN&MCLRDIS&PWRTEN&WDTEN&INTIO);/********************************************************************************///void init (void);/********************************************************************************///bit fg_pw,fg_vs,fg_zq;volatile unsigned char fg_count;volatile unsigned int time1_temp,buff;/********************************************************************************/#define powon GPIO|=0B00110000#define powoff GPIO&=0B00001111#define vpp GPIO2#define feedback GPIO0/********************************************************************************/void init (void){ CLRWDT();TRISIO=0B11001111;WPU=1;IOCB=4; //使能过零信号中断VRCON=0;PIE1=1;OPTION=0;INTCON&=7;INTCON|=0B10001000;CMCON=7;T1CON&=1;T1CON|=0x10;}/*********************************************************************************/void interrupt isr_power (void){ GPIO=GPIO;if (TMR1IF&&TMR1ON){ TMR1IF=0;if (fg_pw){ if (!fg_vs){powon;fg_vs=1;TMR1L=112;TMR1H=0xfe;} //触发宽度400US(256+144)else{fg_vs=0;powoff; //关闭TMR1ON=0;}}else {powoff;fg_count=0;}}if (GPIF){ GPIF=0;if (fg_pw){fg_zq=1;TMR1H=(time1_temp>〉8);TMR1L=(time1_temp&0xff);//if (vpp==0) TMR1H—=3; //上下沿检测,下沿时间补偿(3*256)USTMR1ON=1;}else{ if (vpp){TMR1ON=1;TMR1L=TMR1H=0;} //l-—〉helse{time1_temp=(TMR1H<〈8|TMR1L); //h—-〉lTMR1ON=0;TMR1L=TMR1H=0;time1_temp=~time1_temp; //同步信号周期检测(时间)time1_temp+=1000; //一个半周时间中缩短1MS开始触发buff=time1_temp;if (++fg_count>=4) fg_pw=1;//连续周期检测4次}}}}/************************************************************************************/void main (void){ unsigned int i;TMR0=0;init();while (1){ if (fg_pw&&fg_zq){ fg_zq=0;if (feedback) {if(time1_temp〈0xffff-1000) time1_temp+=20;}//功率(电压)上限else{if (time1_temp>buff)time1_temp—=20;} //功率(电压)下限for (i=1000;i!=0;i-—) {;}init();}}}光电隔离抗干扰技术及应用摘要:在电子电路系统中,不可避免地存在各种各样的干扰信号,若电路的抗干扰能力差将导致测量、控制准确性的降低,甚至产生误动作,从而带来破坏性的后果.因此,若硬件上采用一些设计技术,破坏干扰信号进入测控系统的途径,可有效地提高系统的抗干扰能力。
基于单片机单相交流过零检测及脉冲输出电路设计

基于单片机单相交流过零检测及脉冲输出电路设计【摘要】目前,可控硅做为大功率电子器件在工程中得到广泛应用,其触发方式在许多交流设备中都采用过零触发方式,而其控制多通过对触发脉冲的脉宽调节来实现。
本文介绍一种由单片机控制的过零检测及脉冲输出电路。
本设计包括硬件和软件设计两部分。
硬件部分包括电源电路、过零检测电路、控制电路、脉冲波输出电路等部分组成。
处理器采用51单片机,设计完成了过零检测,并能输出脉宽度从1ms~10ms某一种满足控制要求的脉冲波。
【关键词】51单片机;过零检测;脉冲The design of single-phase alternating current zero crossing detection and pulse output circuit based on single chip microcomputerNorthern University of China,College of computer and control engineering Luo-wei Yang-feng Jiao-LiliAbstract:at present,thyristor as power electronic devices are widely used in engineering,the trigger mode in many communication equipment using zero crossing trigger mode,and its control by the pulse width trigger pulse conditioning to achieve.A microcomputer controlled by the zero crossing detection and pulse output circuit is introduced in this paper.The design includes two parts of hardware and software design.The hardware includes the power circuit,the zero crossing detection circuit,control circuit,pulse output circuit.The processor uses 51single chip microcomputer,completed the design of zero crossing detection,and can output pulse width from 1ms to 10ms one to meet the control requirements of pulse wave.Keywords:51 single-chip;microcomputer;zero crossing detection;pulse1.引言当今社会,科学技术飞速发展、日新月异。
基于单片机的新型交流调功器设计

基于单片机的新型交流调功器设计王志华;郭英芳【摘要】设计了一种可控硅控制导通角的大小,调整加热电压的移相触发调功器.通过单片机计算分析可控硅导通角的大小,实现电源功率的调节,控制电阻炉的加热电压,来调节温度.【期刊名称】《杨凌职业技术学院学报》【年(卷),期】2017(016)004【总页数】5页(P31-34,44)【关键词】过零检测;导通角;功率控制【作者】王志华;郭英芳【作者单位】杨凌职业技术学院,陕西杨凌 712100;杨凌职业技术学院,陕西杨凌712100【正文语种】中文【中图分类】TM76工业电炉采用的电阻炉加热装置,多采用可控硅进行功率调节,其触发方式有过零触发和移相触发。
过零触发是在设定时间间隔内,改变可控硅导通的周波数来实现电压或功率的控制,当通断比太小时会出现低频干扰,通常只适用于热惯性较大的电热负载。
移相触发是可控硅控制的一种方式,通过控制可控硅的导通角大小来控制可控硅的导能量,从而改变负载上所加的功率,具有控制波动小,电流、电压输出平滑,稳定。
目前市场上的移相触发,谐波干扰大,控制不精确。
设计了一种由过零检测电路、单片机控制电路、可控硅触发电路组成的控制可控硅导通角大小的移相触发功率调节器,可有效地避免各种干扰因素,提高了温控的可靠性。
可控硅又称为晶闸管,是在硅整流二极管的基础上发展起来的新型大功率变流器件。
可控硅具有可控的导电特性,能以小功率信号去控制大功率系统,从而使电子技术从弱电领域进入强电领域。
可控硅由PNPN四层半导体构成,共有三个PN结和三个电极(阳极A,阴极K,控制极G)。
可控硅阳极A接电源的正极,阴极K经负载接电源负极。
可控硅承受正向电压,在控制极G和阴极K之间加适当的正向电压,可控硅正向导通。
可控硅调功器具有导通和关断的开关特性,在可控硅的阳极A和阴极K之间加正向电压,并且在控制极G和阴极K之间加适当的正向电压即可使可控硅正向导通,此时控制极即失去控制作用,要使导通的可控硅关断,必须减小阳极电流,使之小于维持可控硅导通的最小阳极电流,或者在阳极和阴极之间加反向电压。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的过零检测控制系统的设计如下图所示为按上述思想设计的电压正向过零检测电路。
220V的交流电首先经过电阻分压,然后进行光电耦合,假设输入的是A相电压,则在A相电压由负半周向正半周转换时,图中三极管导通并工作在饱和状态,会产生一个下降沿脉冲送入ADμC812的INT0引脚使系统进入中断程序。
微机系统进入中断程序后,发出采样命令并从采样保持器读取无功电流值Iqm,这个无功电流即为A相的无功电流,经过1/4个周期电压达到最大值,此时对电压进行采样,得到UM,由UM=1.414U可以得到电压有效值U。
过零检测及单片机调压首先用PWM(脉宽调制)方法用于可控硅控制是有条件的,即调制频率不能大于市电频率(50Hz),也就是周期不能小于20mS,否则就不能达到调制作用,调制频率超过市电频率时,可控硅即处于连续导通状态而不能达到调压目的。
只有调制频率低于市电频率才能起到调压目的,即限制市电的周波通过可控硅的数量而起到调压的目的。
因此用该种方法调制的电压周波数一定是小于50HZ,超过了人眼视觉暂留效应,此就是用于调光产生闪烁的原因。
该调压方法用在调功或对脉动电压不敏感的用途上尚可。
如果采用可控硅调压用在调光上,须采用移相的调制方法,可使光连续可调。
采用移相方法就需过零检测作为移相基点。
过零检测其实并不难,如果要求调压比不是很高采用简单的方法即可奏效;用一只三极管即可。
用单片机进行移相调压控制可以做得很精。
/********************************************************************************/#i nclude <pic.h>__CONFIG (CPD&PROTECT&BOREN&MCLRDIS&PWRTEN&WDTEN&INTIO);/********************************************************************************///void init (void);/********************************************************************************///bit fg_pw,fg_vs,fg_zq;volatile unsigned char fg_count;volatile unsigned int time1_temp,buff;/********************************************************************************/#define powon GPIO|=0B00110000#define powoff GPIO&=0B00001111#define vpp GPIO2#define feedback GPIO0/********************************************************************************/void init (void){ CLRWDT();TRISIO=0B11001111;WPU=1;IOCB=4; //使能过零信号中断VRCON=0;PIE1=1;OPTION=0;INTCON&=7;INTCON|=0B10001000;CMCON=7;T1CON&=1;T1CON|=0x10;}/*********************************************************************************/ void interrupt isr_power (void){ GPIO=GPIO;if (TMR1IF&&TMR1ON){ TMR1IF=0;if (fg_pw){ if (!fg_vs){powon;fg_vs=1;TMR1L=112;TMR1H=0xfe;} //触发宽度400US(256+144)else{fg_vs=0;powoff; //关闭TMR1ON=0;}}else {powoff;fg_count=0;}}if (GPIF){ GPIF=0;if (fg_pw){fg_zq=1;TMR1H=(time1_temp>>8);TMR1L=(time1_temp&0xff);//if (vpp==0) TMR1H-=3; //上下沿检测,下沿时间补偿(3*256)USTMR1ON=1;}else{ if (vpp) {TMR1ON=1;TMR1L=TMR1H=0;} //l-->helse{time1_temp=(TMR1H<<8|TMR1L); //h-->lTMR1ON=0;TMR1L=TMR1H=0;time1_temp=~time1_temp; //同步信号周期检测(时间)time1_temp+=1000; //一个半周时间中缩短1MS开始触发buff=time1_temp;if (++fg_count>=4) fg_pw=1;//连续周期检测4次}}}}/************************************************************************************/void main (void){ unsigned int i;TMR0=0;init();while (1){ if (fg_pw&&fg_zq){ fg_zq=0;if (feedback) {if(time1_temp<0xffff-1000) time1_temp+=20;}//功率(电压)上限else{if (time1_temp>buff)time1_temp-=20;} //功率(电压)下限for (i=1000;i!=0;i--) {;}init();}}}光电隔离抗干扰技术及应用摘要:在电子电路系统中,不可避免地存在各种各样的干扰信号,若电路的抗干扰能力差将导致测量、控制准确性的降低,甚至产生误动作,从而带来破坏性的后果。
因此,若硬件上采用一些设计技术,破坏干扰信号进入测控系统的途径,可有效地提高系统的抗干扰能力。
事实证明,采用隔离技术是一种简便且行之有效的方法。
隔离技术是破坏“地”干扰途径的抗干扰方法,硬件上常用光电耦合器件实现电→光→电的隔离,它能有效地破坏干扰信号的进入,可靠地实现信号的隔离,并容易构成各种功能状态。
关键词:光电耦合器隔离抗干扰1.光电耦合器件简介光电耦合器件是把发光器件(如发光二极管)和光敏器件(如光敏三极管)集成在一起,通过光线实现耦合构成电一光和光一电的转换器件。
图1所示为常用的三极管型光电耦合器原理图。
当电信号送人光电耦合器的输入端时,发光二极管通过电流而发光,光敏元件受到光照后产生电流,CE导通;当输入端无信号,发光二极管不亮,光敏三极管截止,CE不通。
对于数字量,当输人为低电子“0”时,光敏三极管截止,输出为高电平“1”;当输人为高电平“1”时,光敏三极管饱和导通,输出为低电平“0”。
若基极有引出线则可满足温度补偿、检测调制要求。
光电耦合器之所以在传输信号的同时能有效地抑制尖脉冲和各种噪声干扰,使通道上的信噪比大为提高,主要有以下几方面的原因:(1)光电耦合器的输入阻抗很小,只有几百欧姆,而干扰源的阻抗较大,通常为105~106Ω。
据分压原理可知,即使干扰电压的幅度较大,但馈送到光电耦合器输入端的噪声电压会很小,只能形成很微弱的电流,由于没有足够的能量而不能使二极管发光,从而被抑制掉了。
(2)光电耦合器的输入回路与输出回路之间没有电气联系,也没有共地;发光管和受光器之间的耦合电容很小(2pF以)的分布电容极小,而绝缘电阻又很大,因此回路一边的各种干扰噪声都很难通过光电耦合器馈送到另一边去,避免了共阻抗耦合的干扰信号的产生。
(3)光电耦合器可起到很好的安全保障作用,即使当外部设备出现故障,甚至输入信号线短接时,也不会损坏仪表。
因为光耦合器件的输入回路和输出回路之间可以承受几千伏的高压。
(4)光电耦合器的响应速度极快,其响应延迟时间只有10μs左右,适于对响应速度要求很高的场合。
2.光电隔离技术的应用2.1 微机接口电路中的光电隔离微机有多个输入端口,接收来自远处现场设备传来的状态信号,微机对这些信号处理后,输出各种控制信号去执行相应的操作。
在现场环境较恶劣时,会存在较大的噪声干扰,若这些干扰随输入信号一起进入微机系统,会使控制准确性降低,产生误动作。
因而,可在微机的输入和输出端,用光耦作接口,对信号及噪声进行隔离。
典型的光电耦合电路如图2所示。
该电路主要应用在“A/D转换器”的数字信号输出,及由CPU发出的对前向通道的控制信号与模拟电路的接口处,从而实现在不同系统间信号通路相联的同时,在电气通路上相互隔离,并在此基础上实现将模拟电路和数子电路相互隔离,起到抑制交叉串扰的作用。
2.2 功率驱动电路中的光电隔离在微机控制系统中,大量应用的是开关量的控制,这些开关量一般经过微机的。